

Toward Collaborative Intelligence in IoV Systems: Recent Advances and Open Issues


Abstract
:1. Introduction
2. Internet of Vehicles and Collaborative Intelligence
2.1. Internet of Vehicles
- Information gathering: Data are collected through the use of various sensors (pollution detection sensors, cameras, road sensors, etc.) that provide drivers with enough information to react to environmental changes in an adequate and effective manner.
- High mobility: Vehicular networks (VNs) have highly mobile nodes, related to the speed of the car, and nodes can be added and disappear in a short period of time, resulting in repeated topology changes.
- Type of information transmitted: Messages are transmitted according to the level of participation in the event triggered. Messages can be sent from an initiator to a destination (unicast), or from an initiator to a specific cluster using multi-hop communication (multicast). Vehicles can also send messages to all other vehicles via broadcast.
- Processing big data: A large number of VNs generate large amounts of data, and vehicular networks use cloud computing to process and store big data.
- Internet facilities: The IoV has the unique feature of accessing the Internet. The connected vehicles can benefit from this huge network.
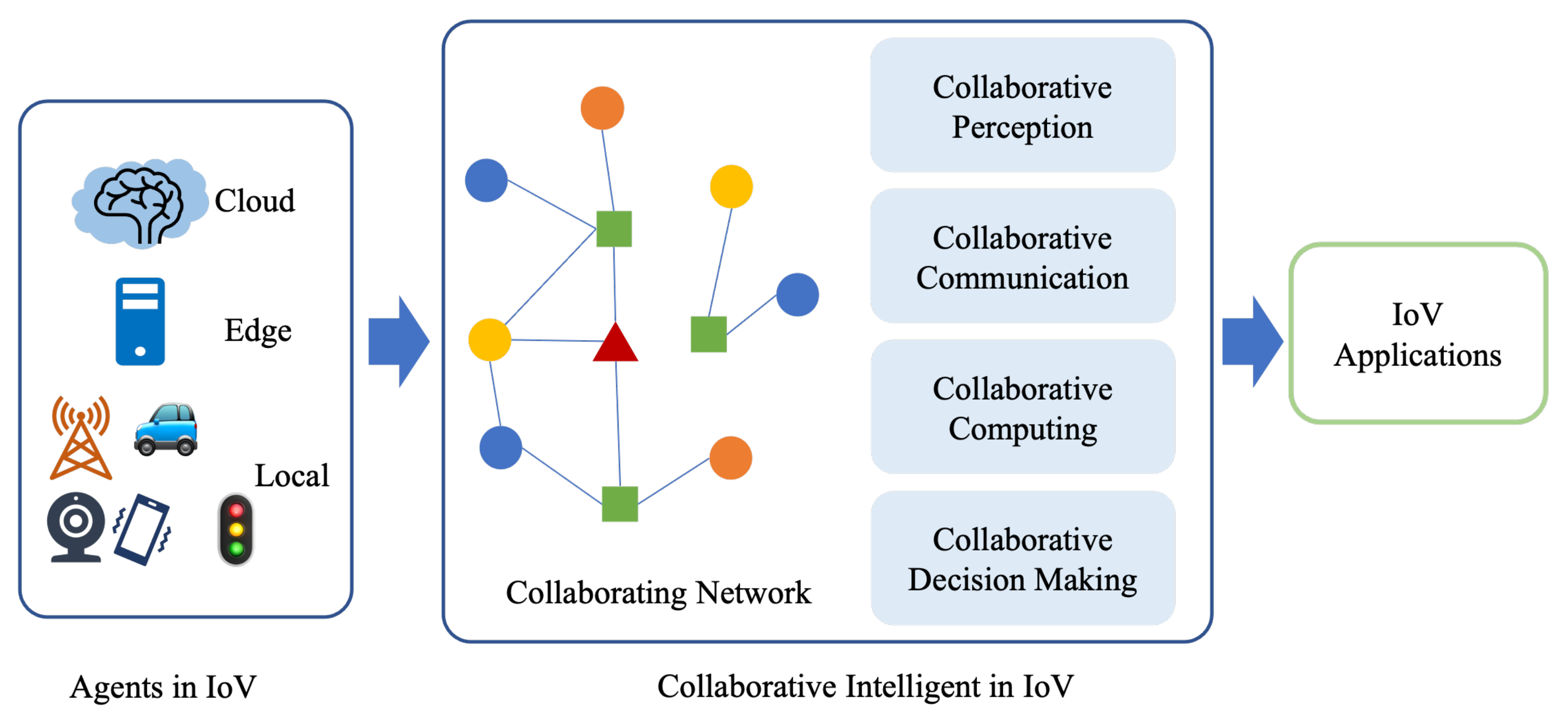
2.2. Collaborative Intelligent in IoV
- Collaborative communications over various wireless spectrum types among many transmitters to increase the efficiency of the spectrum utilization.
- Collaborative computing with an end-edge-cloud task processing framework that is resource efficient, meeting a variety of demands on the massive amount of real-time data processing, including exceptionally high throughput and ultra-low latency.
- Collaborative caching among numerous network entities to decrease service latency.
- Enable coordination between smart devices.
- Privacy protection and data security issues arising from data and information sharing.
- Efficient collaborative learning with low overhead in scenarios with limited bandwidth and strict latency requirements.
3. Networking Technologies toward Collaborative Intelligence
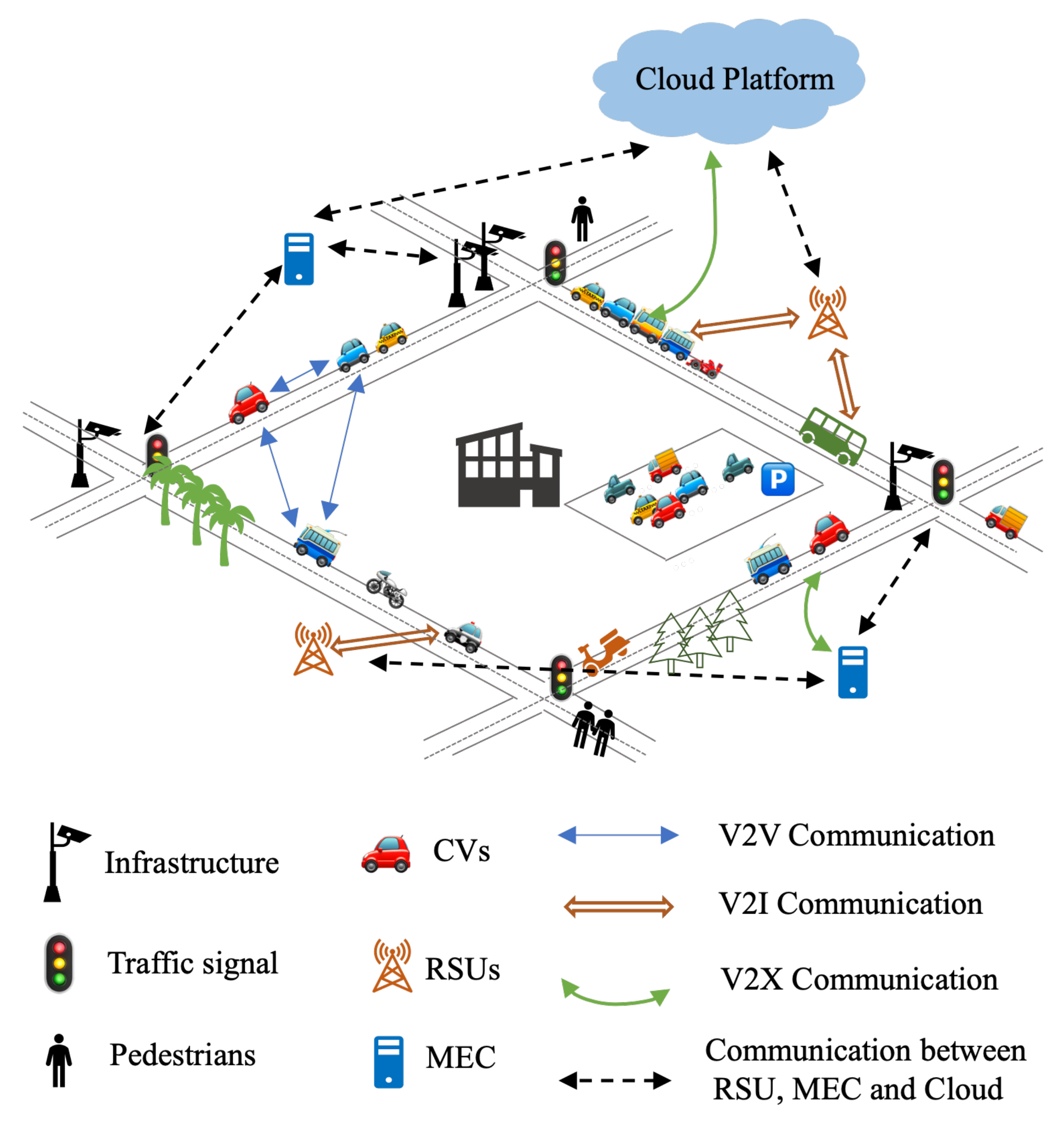
- From the perspective of communicating objectIt can be divided into V2V, V2I, V2P, and V2N, such as the urban traffic scene in Figure 2. Through V2V communication, the information of the surrounding vehicles can be obtained in the process of vehicle driving, and the vehicles can also constitute an interactive platform, which is often used to transfer control information or safety information between vehicles. Generally, the time delay requirements are high. V2I allows vehicles to communicate with roadside infrastructure (such as traffic cameras, roadside units, bus stations, traffic lights, and parking lots), and through the roadside infrastructure, vehicles can also obtain information about nearby vehicles and send various real-time information. Usually, the amount of data transmission is large, which is mainly used in real-time information service and vehicle monitoring and management. V2P involves communication between vehicles and mobile devices used by vulnerable traffic groups (such as pedestrians and cyclists). V2P communication can be implemented via Bluetooth or Near Field Communication (NFC) technology, and it is often used to avoid traffic accidents and information services. V2N is the connection and information exchange between vehicle or driver and cloud platform or internet through an access network/core network. After storing and processing the acquired data, various applications and services are provided for vehicle users and management departments [33].
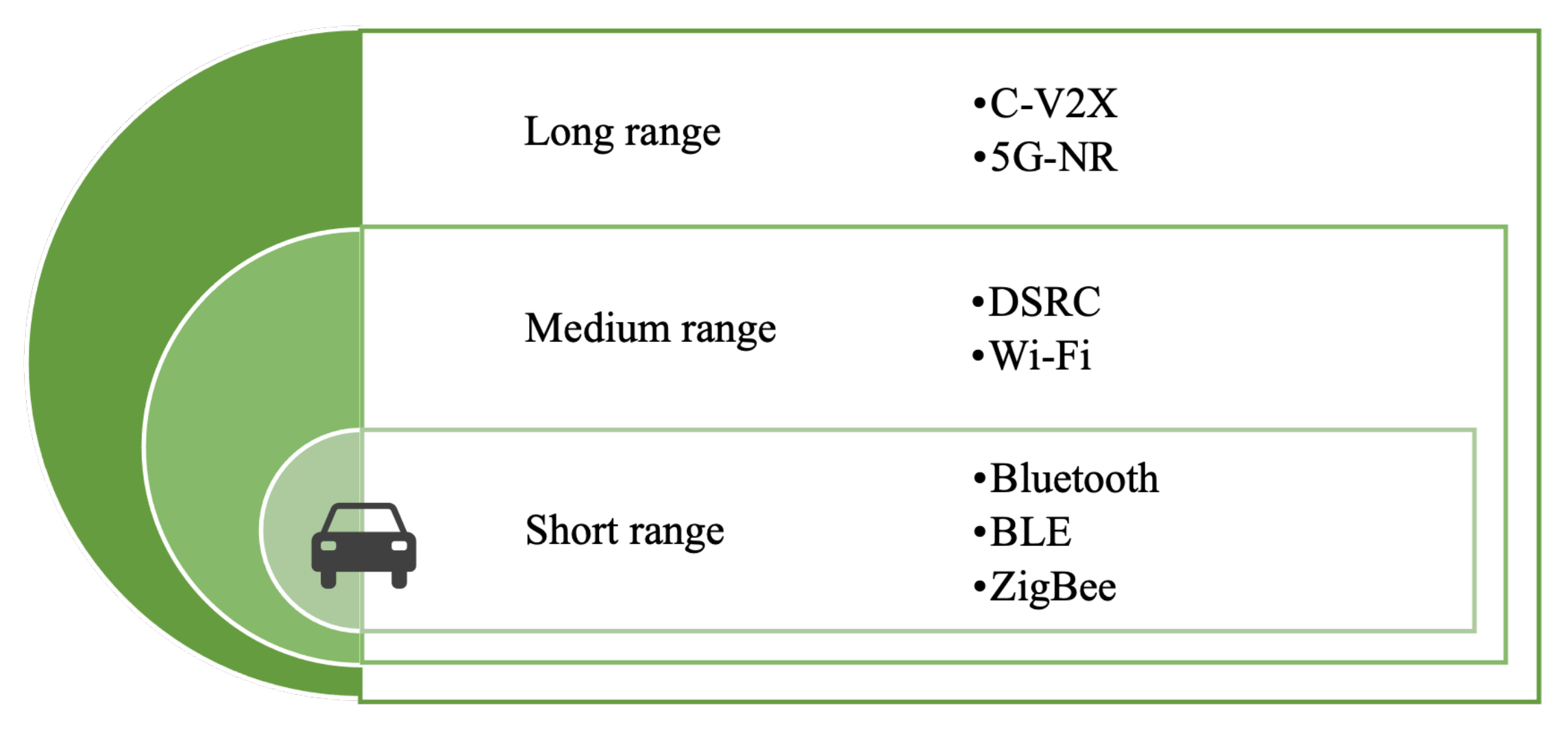
- From the perspective of communicating rangeCommunication in IoV can be classified as short-range, medium-range, and long-range communication [34], as shown in Figure 5. Short-range communication technology can be used for in-vehicle device connection or V2P scenarios, including Bluetooth, UWB, ZigBee, etc. At present, Wireless Local Area Network (WLAN) and DSRC are able to provide wireless communication within approximately 300 meters for IoV, which can be used in V2V and V2I scenarios and classified as medium-range communication. Cellular Communication technology enables vehicles to communicate with objects thousands of meters away. Nowadays, there is no one communication method that can meet all the communication needs of IoV. Therefore, how to select and formulate a scheme to ensure the CI between vehicle and vehicle, and vehicle and environment, is a key concern when the above multiple access methods coexist.
- From the perspective of data dissemination and protocolIt is also possible to classify the network technologies of IoV into three categories: unicast communication, geocast, and broadcast communication, which respectively represent from one vehicle to another, from a vehicle to a group of vehicles, and from one vehicle to all other vehicles in the specified range. Important data can be transmitted in a dedicated resource pool using unicast transmission to avoid data transmission, such as platooning and advanced driving. For sensor data sharing or geographical location demanding scenarios, the geocast or broadcast transmission were carried out through the shared resource pool. Broadcast communications are used when collision warnings and traffic jam messages are disseminated [35]. From the perspective of routing, there are single-hop and multi-hop communication methods [36].
3.1. Radio Access Technology Selection in IoV

| Publication | Research Summary | Communication Technology | Scenarios |
|---|---|---|---|
| [39] | A network selection approach that The dynamic Q-learning algorithm was used to verify the necessity of handover, and the fuzzy CNN was used to select the network. | DSRC, 4G-LTE and 5G mmWave | V2V |
| [40] | The communication performance of DSRC and LTE in three typical IoV applications is tested in a real road environment. | DSRC, 4G-LTE | V2V, V2I |
| [41] | An Integrated Approach of 4G LTE and DSRC for IoV by Using a Novel Cluster-Based Efficient Radio Interface Selection Algorithm. | DSRC, 4G-LTE | V2V |
| [42] | A heterogeneous network architecture incorporating multiple wireless interfaces and a Best Interface Selection algorithm are proposed. | WAVE, Wi-Fi, 4G-LTE | V2I |
| [43] | A conceptual multi-RAT OBU architecture for personal mobility vehicles such as shared bikes, segways or electric scooters and its RAT selection approach are discussed. | LPWAN, Wi-Fi, Cellular | V2I, V2N |
| [44] | A vertical handover architecture inside the vehicle is implemented based on the logical interface in TCP/IP mode. | IEEE 802.11P, cellular, Wi-Fi | V2X |
| [45] | A Dynamic Radio Access Selection and Slice Allocation algorithm for 5G and above heterogeneous networks is proposed. | 5G and above: small-cells, macro-cells, Wi-Fi | IoT |
3.2. Routing Protocol in IoV
| Publication | Research Summary | Communication Technology | Scenarios |
|---|---|---|---|
| [47] | A survey about geographic routing protocols of three type of VANETs: Delay Tolerant, Non-Delay Tolerant and hybrid type. | Position based | V2V |
| [48] | An opportunistic and position-based routing protocol with candidate relay node set selection strategy, the priority scheduling scheme and removing the expired links mechanism. | Opportunistic and Position based | V2V |
| [49] | A multi-hop greedy position-based routing algorithm with fuzzy logic techniques is proposed. | Position-based routing with greedy fuzzy logic | V2V |
| [50] | A mobility-aware dynamic-clustering-based routing which forms clusters based on Euclidean distance, uses a Mayfly optimization algorithm to select cluster heads and forwards data to RSU is proposed. | Position-based clustering method | V2I |
| [51] | A routing protocol based on movement prediction is studied using the intention of the driver. | Position based | V2V |
| [52] | An improved position-based routing protocol with a Kalman filter and an extended Kalman filter is studied. | Position based with Kalman filter | V2V |
| [53] | A routing protocol considering network connectivity to dynamically clustered vehicles and select gateway nodes is studied. | Connectivity prediction-Based clustering | V2V |
| [54] | Proposed a vehicle-density-prediction-based routing protocol in which optimal relay nodes are selected on the road grid according to the real-time traffic information. | Grid and vehicle-density- prediction based, neural network | V2V |
| [55] | A method of actively selecting routing and communication interface with Q-learning is proposed in the case of multi-access vehicular edge computing environment. | Reinforcement-learning based | V2V, V2I |
3.3. Authentication and Secure Communications in IoV
- Achieve effective and fast authentication of the validity and integrity of messages.
- Avoid exposing user privacy to anyone other than the licensor.
- Trace the appearance of malicious nodes or false information in the network.
- Ensure that the information transmitted by malicious nodes is irrelevant to the control of vehicles.
- Withstand cryptanalysis attacks by quantum computers.
- Prevent middleman modification, counterfeiting, authentication table theft, replay attacks, etc.
| Publication | Research Summary |
|---|---|
| [56] | The security and privacy issues in VANETs are reviewed. |
| [57] | A quantum-defended blockchain-assisted data authentication protocol is proposed. |
| [58] | An effective vehicle-centric CRL distribution mechanism is proposed for secure and privacy-preserving IoV. |
| [59] | A blockchain-based data exchange system that is safe and verifiable is investigated. |
| [60] | A bivariate polynomial lightweight mutual authentication and key agreement protocol with blockchain is proposed. |
| [61] | An authenticated key agreement protocol without bilinear pairing is proposed to meet the security requirements of a fog-based vehicular network. |
| [62] | A secure authentication key management protocol for the deployment of IoV based on fog computing is studied to realize the safe communication in vehicle network, RSUs, fog, and cloud servers. |
| [63] | A framework that uses decentralized off-chain dataset and blockchain networks is proposed to increase the security. |
| [64] | A blockchain-based payment strategy for intelligent vehicle refueling to protect sensitive information when data sharing. |
| [65] | A trusted routing scheme based on blockchain and fuzzy logic is proposed to improve discrimination of malicious user in vehicular network. |
4. Collaborative Computing in IoV
| Purpose | Publication | Research Summary |
|---|---|---|
| Task offloading | [82] | The cloud–MEC collaborative computing offloading problem is established by co-optimizing computing offloading decision and computing resource allocation. |
| [83] | Intelligence-Sharing MEC framework with aggregation and representation for context features, relationship mining and reasoning, and knowledge transfer among MEC servers is discussed. | |
| [84] | A deep cooperative hierarchical end–edge framework using data communication, computation offloading, and content caching is proposed. | |
| [85] | An edge caching and computing management problem that jointly optimizes service caching, request scheduling, and resource allocation policies is proposed. | |
| [86] | To balance delay and energy usage, a distributed iterative approach to handle multivariable and time-varying channel conditions for computational offloading methods is proposed. | |
| Data storage and cache management | [87] | A cache service registry on mobile entities and a new metric to evaluate the effectiveness of service discovery are proposed. |
| [88] | A collaborative edge caching scheme is proposed, which shares communication, computation, and caching, and co-optimizes content placement and delivery through flexible trilateral cooperation among macro cells. | |
| [79] | An edge content caching method for service demand prediction in the IoV in smart city scenarios is proposed. |
4.1. Big-Data-Oriented Task Offloading
4.2. Data Storage and Cache Management in IoV
5. Collaborative Learning Technologies
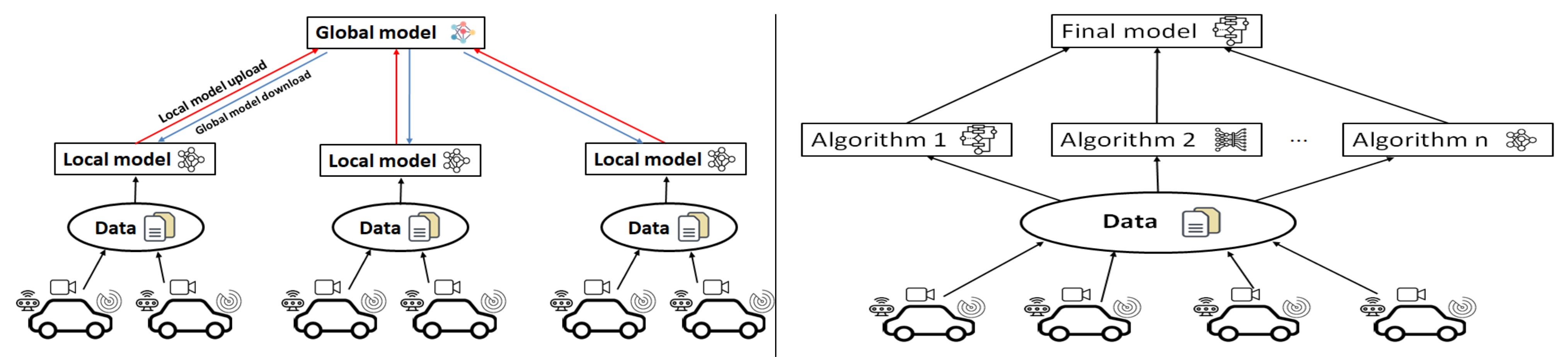
- Federated learning.
- Ensemble learning.
- Supervised learning.
- Reinforcement learning.
5.1. Federated Learning for IoV
5.2. Ensemble Learning for IoV
5.3. Clustering with Unsupervised Learning
5.4. Reinforcement Learning
6. Discussion of Future Research Directions
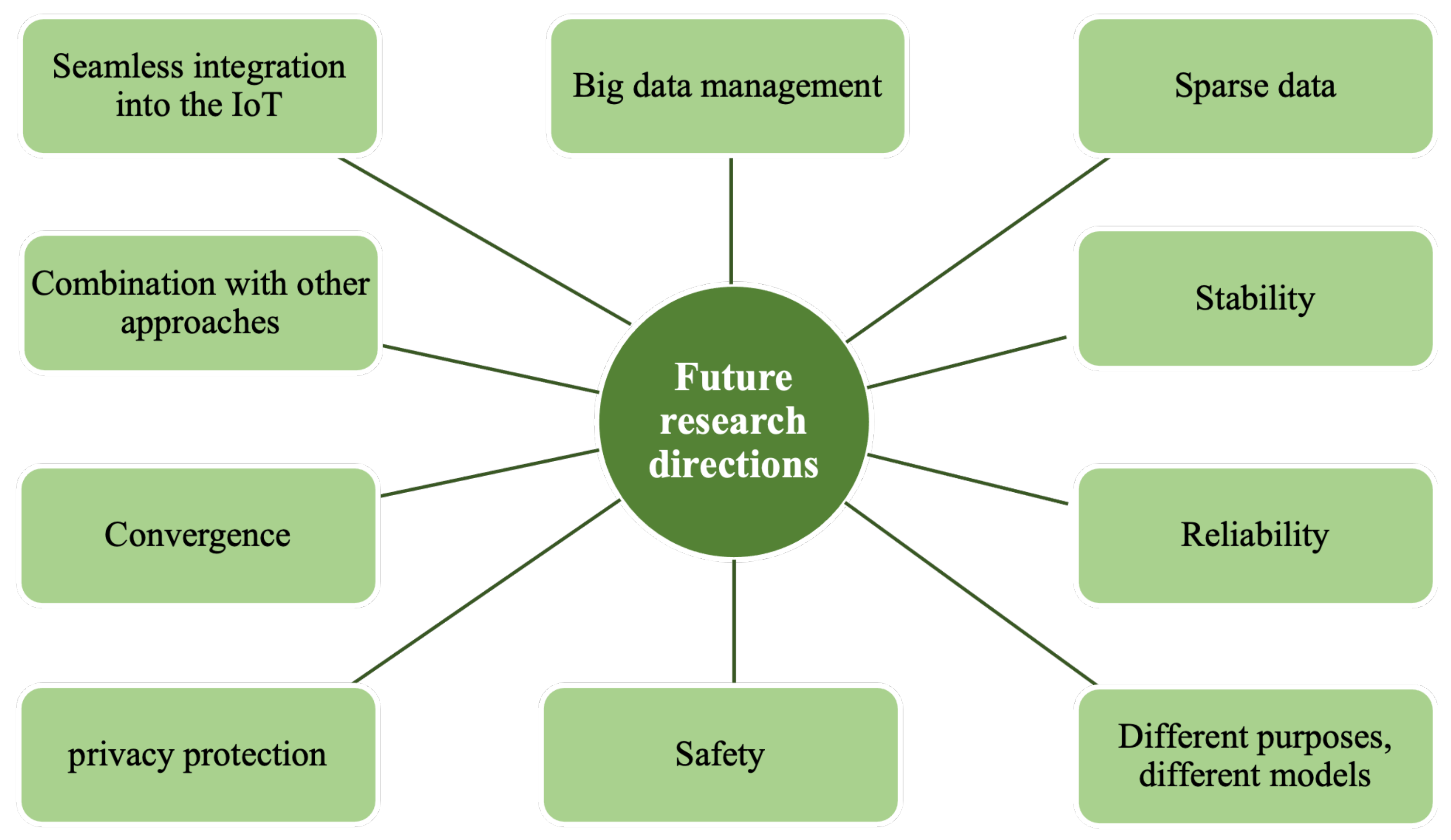
- Big Data Management: In IoV under collaborative intelligence, multiple types of smart devices generate a large amount of data, which are stored locally or in the cloud. Network latency and insufficient storage affect computation and analysis, and may even break the system. Therefore, the real-time management and analysis of IoV big data has always been a challenge, but will also be a challenge in the future. (1) Comprehensive awareness of the environment: Fusing sensor data and historical knowledge in the collaborative network provides comprehensive awareness of the environment for the whole system and each entity, so as to improve the accuracy and security of decision making. (2) Storage and preprocessing of big data: Effectively utilizing the storage capacity of edge nodes and cloud data centers to further compress the increasing massive data and eliminate a large amount of redundancy is another important research direction. (3) Data transmission and unified standards: In the case of vehicle movement and low latency, big data have more stringent requirements on communication, so reducing the amount of transmitted data and improving communication efficiency is inevitable. Research on more reasonable communication protocols, design of edge computing models with a small amount of data transmission, and use of semantic communication to compress data are all directions which researchers can make further efforts to explore. Furthermore, establishing a unified transmission standard and increasing investment in infrastructure can greatly accelerate the development of IoV.
- Sparse Data: Since most collaborative intelligence requires machine learning methods that are data-driven or interact with the environment, a large amount of training data will be used to train a model for a certain task. This puts forward high requirements for data collection and processing, but some tasks make it difficult to collect corresponding high-quality data in reality, resulting in the problem of data sparsity. In order to overcome this problem, many studies use realistic simulators to generate simulated data for model training, and then transfer to real data to fine-tune the model. On the other hand, the learning model is built and adjusted, or other intelligent methods are combined to optimize the training effect. In addition, expanding the scope of collaboration and deepening the cooperation in collaboration can alleviate the problem of data sparsity to a certain extent. This is also an aspect to which future researchers can devote their energy.
- Stability: Vehicles are dynamic in nature, and the network topology of IoV also changes at any time, so stability is also a major challenge in this field. The stability is reflected in the network connectivity, and the data and signal transmission between agents need high-quality communication capabilities. Although there are many research studies on the cooperative communication of Internet of Vehicles, the Internet facilities for Internet of Vehicles or Internet of Things are not perfect in most areas, and it will take some time to achieve coverage of 5G and the development of 6G. Therefore, the real realization of collaborative intelligent communication in the Internet of Vehicles still needs efforts.
- Reliability: Applications related to intelligent transportation and UAV detection are usually sensitive to safety, because such applications require high reliability, otherwise there will be serious losses of life and property. In the application of Internet of Vehicles, reliability is an important issue due to the large scale of the network, complex computing architecture, and poor network stability.
- Different Purposes, Different models: Collaborative intelligent models based on machine learning are widely used in Internet of Vehicles tasks and have achieved good results, such as reinforcement learning, federated learning, centralized learning, etc. However, in different tasks and objectives, different learning models and methods are usually used. The data demand is large, the processing is tedious, the model parameters are particularly large, the training time is long, and the model is not universal. In future research, this problem can be optimized from two perspectives. (1) Building a unified large model that integrates data and is suitable for multi-class tasks after a simple fine-tuning process. (2) Constructing different models for different purposes to refine tasks and achieve better results.
- Safety: Safety is one of the core challenges in the field of Internet of Vehicles. It is a network that is connected by a variety of devices and integrates different technologies and standards through the Internet to achieve collaborative intelligence. Not only must infrastructure such as roadside units, cloud storage centers, and computing centers be connected to the network, but also most of the vehicle’s devices such as GPS, cameras, sensors, brakes, and accelerators may be accessed remotely. So if the network security is not in place, the attacker may control a large number of network devices or even directly control the vehicle, leading to serious consequences. At present, IoV is not completely secure against all kinds of attacks, such as quantum attacks. Therefore, the discovery and repair of security vulnerabilities, and even the establishment of a more perfect security system are indispensable challenges in the future.
- Privacy Protection: In V2X network, the everything-connected network will create the problem of data and privacy exposure. How to protect user privacy and data is also a very recent concern, including the application of federated learning and blockchain technology in IoV collaboration. The most popular solution in this regard is to use federated learning and blockchain technology, which can avoid the direct transmission of original user data to make task decisions and take advantage of the decentralization and tamper-proof characteristics of blockchain to improve the privacy protection ability. However, the cost of applying these technologies in IoV collaboration is not low, and there are unsolved difficulties.
- Convergence: The problem of training efficiency of machine learning models is often involved in coordinated intelligence methods. Under the strict service requirements of high security, stability and low latency, methods that help the model achieve higher learning accuracy and faster convergence speed are worthy of further improvement.
- Combination with other approaches: At present, the method of deep learning is widely used to realize the collaborative intelligence of Internet of Vehicles, and has achieved good results. On this basis, other effective ideas and approaches, such as fuzzy logic, semantic communication, and digital twins, can be combined to further optimize the task results.
- Seamless integration into the IoT in future: As a part of the future Internet of Things, the Internet of Vehicles must be integrated into the smart city and other next-generation Internet of Everything environment, such as Industry 5.0. Therefore, we believe that the development of IoV technology and the deployment of practical applications should also consider integration and collaboration with other fields, such as smart healthcare. At the same time, the collaboration with human needs to be paid more attention to lay the foundation for providing users with more personalized services.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AC | Actor–Critic. |
| AI | Artificial Intelligence. |
| CI | Collaborative Intelligence. |
| CNN | Convolutional Neural Network. |
| C-V2X | Cellular Vehicle to Everything. |
| DSRC | Dedicated Short Range Communication. |
| DT | Decision Tree. |
| EV | Electric Vehicle. |
| GB | Gradient Boosting. |
| GPS | Global Positioning System. |
| HCP | Heterogeneous Computing Platform. |
| HVN | Heterogeneous Vehicle Network. |
| IoT | Internet of Things. |
| IoV | Internet of Vehicles. |
| ITS | Intelligent Transportation System. |
| IV | Intelligent Vehicles. |
| KNN | K-Neighborhood. |
| LiDAR | Light Detection and Ranging. |
| LP | License Plate. |
| LSTM | Long Short-Term Memory. |
| MARL | Multi-Agent Reinforcement Learning. |
| MCS | Modulation and Coding Scheme. |
| MEC | Mobile Edge Computing. |
| MIMO | Multiple-Input Multiple-Output. |
| mmWave | Millimeter Wave. |
| NFC | Near Field Communication. |
| NSs | Network Slices. |
| QoS | Quality of Service. |
| RAT | Radio Access Technology. |
| RF | Random Forests. |
| RSU | Roadside Unit. |
| SDN | Software Defined Network. |
| SVM | Support Vector Machine. |
| UAVs | Unmanned Aerial Vehicles. |
| V2I | Vehicle-to-Infrastructure. |
| V2N | Vehicle-to-Cloud/Edge. |
| V2P | Vehicle-to-Pedestrian And Cyclist. |
| V2R | Vehicle-to-Road. |
| V2V | Vehicle-to-Vehicle. |
| VANET | Vehicular Ad Hoc Network. |
| VN | Vehicular Network. |
| WLAN | Wireless Local Area Network. |
References
- Xu, X.; Lu, Y.; Vogel-Heuser, B.; Wang, L. Industry 4.0 and Industry 5.0—Inception, conception and perception. J. Manuf. Syst. 2021, 61, 530–535. [Google Scholar] [CrossRef]
- Chen, C.; Liu, L.; Wan, S.; Hui, X.; Pei, Q. Data Dissemination for Industry 4.0 Applications in Internet of Vehicles Based on Short-term Traffic Prediction. ACM Trans. Internet Technol. 2021, 22, 1–18. [Google Scholar] [CrossRef]
- Loke, S.W. Cooperative Automated Vehicles: A Review of Opportunities and Challenges in Socially Intelligent Vehicles Beyond Networking. IEEE Trans. Intell. Veh. 2019, 4, 509–518. [Google Scholar] [CrossRef]
- Kang, Y.; Hauswald, J.; Gao, C.; Rovinski, A.; Mudge, T.; Mars, J.; Tang, L. Neurosurgeon: Collaborative Intelligence Between the Cloud and Mobile Edge. ACM SIGARCH Comput. Archit. News 2017, 45, 615–629. [Google Scholar] [CrossRef]
- Eshratifar, A.E.; Abrishami, M.S.; Pedram, M. JointDNN: An Efficient Training and Inference Engine for Intelligent Mobile Cloud Computing Services. IEEE Trans. Mob. Comput. 2021, 20, 565–576. [Google Scholar] [CrossRef]
- Storck, C.R.; Duarte-Figueiredo, F. A Survey of 5G Technology Evolution, Standards, and Infrastructure Associated with Vehicle-to-Everything Communications by Internet of Vehicles. IEEE Access 2020, 8, 117593–117614. [Google Scholar] [CrossRef]
- Xu, X.; Li, H.; Xu, W.; Liu, Z.; Yao, L.; Dai, F. Artificial intelligence for edge service optimization in Internet of Vehicles: A survey. Tsinghua Sci. Technol. 2022, 27, 270–287. [Google Scholar] [CrossRef]
- Sakiz, F.; Sen, S. A survey of attacks and detection mechanisms on intelligent transportation systems: VANETs and IoV. Ad Hoc Netw. 2017, 61, 33–50. [Google Scholar] [CrossRef]
- Ali, E.S.; Hasan, M.K.; Hassan, R.; Saeed, R.A.; Hassan, M.B.; Islam, S.; Nafi, N.S.; Bevinakoppa, S. Machine Learning Technologies for Secure Vehicular Communication in Internet of Vehicles: Recent Advances and Applications. Secur. Commun. Netw. 2021, 2021, e8868355. [Google Scholar] [CrossRef]
- Hbaieb, A.; Ayed, S.; Chaari, L. A survey of trust management in the Internet of Vehicles. Comput. Netw. 2022, 203, 108558. [Google Scholar] [CrossRef]
- Siddiqui, S.A.; Mahmood, A.; Sheng, Q.Z.; Suzuki, H.; Ni, W. A Survey of Trust Management in the Internet of Vehicles. Electronics 2021, 10, 2223. [Google Scholar] [CrossRef]
- Bangare, S.L.; Prakash, S.; Gulati, K.; Veeru, B.; Dhiman, G.; Jaiswal, S. The Architecture, Classification, and Unsolved Research Issues of Big Data extraction as well as decomposing the Internet of Vehicles (IoV). In Proceedings of the 2021 6th International Conference on Signal Processing, Computing and Control (ISPCC), Solan, India, 7–9 October 2021; pp. 566–571. [Google Scholar]
- Ji, B.; Zhang, X.; Mumtaz, S.; Han, C.; Li, C.; Wen, H.; Wang, D. Survey on the Internet of Vehicles: Network Architectures and Applications. IEEE Commun. Stand. Mag. 2020, 4, 34–41. [Google Scholar] [CrossRef]
- Qureshi, K.N.; Din, S.; Jeon, G.; Piccialli, F. Internet of Vehicles: Key Technologies, Network Model, Solutions and Challenges with Future Aspects. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1777–1786. [Google Scholar] [CrossRef]
- Al-Heety, O.S.; Zakaria, Z.; Ismail, M.; Shakir, M.M.; Alani, S.; Alsariera, H. A Comprehensive Survey: Benefits, Services, Recent Works, Challenges, Security, and Use Cases for SDN-VANET. IEEE Access 2020, 8, 91028–91047. [Google Scholar] [CrossRef]
- Ang, L.-M.; Seng, K.P.; Ijemaru, G.K.; Zungeru, A.M. Deployment of IoV for Smart Cities: Applications, Architecture, and Challenges. IEEE Access 2019, 7, 6473–6492. [Google Scholar] [CrossRef]
- Elmoiz Alatabani, L.; Sayed Ali, E.; Mokhtar, R.A.; Saeed, R.A.; Alhumyani, H.; Kamrul Hasan, M. Deep and Reinforcement Learning Technologies on Internet of Vehicle (IoV) Applications: Current Issues and Future Trends. J. Adv. Transp. 2022, 2022, e1947886. [Google Scholar] [CrossRef]
- Mollah, M.B.; Zhao, J.; Niyato, D.; Guan, Y.L.; Yuen, C.; Sun, S.; Lam, K.-Y.; Koh, L.H. Blockchain for the Internet of Vehicles Towards Intelligent Transportation Systems: A Survey. IEEE Internet Things J. 2021, 8, 4157–4185. [Google Scholar] [CrossRef]
- Jamil, S.; Rahman, M. Fawad A Comprehensive Survey of Digital Twins and Federated Learning for Industrial Internet of Things (IIoT), Internet of Vehicles (IoV) and Internet of Drones (IoD). Appl. Syst. Innov. 2022, 5, 56. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Almalki, F.A. Survey on Collaborative Smart Drones and Internet of Things for Improving Smartness of Smart Cities. IEEE Access 2019, 7, 128125–128152. [Google Scholar] [CrossRef]
- Muza, A.J.M.; Kamarulzaman, S.F.; Rahman, M.A.; Murad, S.A.; Kamal, M.A.S.; Alenezi, A. Multiple Vehicle Cooperation and Collision Avoidance in Automated Vehicles: Survey and an AI-Enabled Conceptual Framework. 2022. Available online: https://www.researchsquare.com/article/rs-1676811/latest.pdf (accessed on 11 July 2022). [CrossRef]
- Bajić, I.V.; Lin, W.; Tian, Y. Collaborative Intelligence: Challenges and Opportunities. In Proceedings of the ICASSP 2021–2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Virtual, 6–12 June 2021; pp. 8493–8497. [Google Scholar]
- Ha, D.; Tang, Y. Collective Intelligence for Deep Learning: A Survey of Recent Developments. arXiv 2022, arXiv:2111.14377. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, W.; Chen, J.; Wang, W. Evolutionary V2X Technologies Toward the Internet of Vehicles: Challenges and Opportunities. Proc. IEEE 2020, 108, 308–323. [Google Scholar] [CrossRef]
- Siriwardhana, Y.; Porambage, P.; Liyanage, M.; Ylianttila, M. A Survey on Mobile Augmented Reality with 5G Mobile Edge Computing: Architectures, Applications, and Technical Aspects. IEEE Commun. Surv. Tutor. 2021, 23, 1160–1192. [Google Scholar] [CrossRef]
- Sharma, S.; Kaushik, B. A survey on internet of vehicles: Applications, security issues & solutions. Veh. Commun. 2019, 20, 100182. [Google Scholar] [CrossRef]
- Malik, S.; Rana, A. Internet of Vehicles: Features, Architecture, Privacy, and Security Issues. In Internet of Things: Security and Privacy in Cyberspace; Saxena, S., Pradhan, A.K., Eds.; Transactions on Computer Systems and Networks; Springer: Singapore, 2022; pp. 189–208. ISBN 978-981-19158-5-7. [Google Scholar]
- Cui, G.; Zhang, W.; Xiao, Y.; Yao, L.; Fang, Z. Cooperative Perception Technology of Autonomous Driving in the Internet of Vehicles Environment: A Review. Sensors 2022, 22, 5535. [Google Scholar] [CrossRef]
- Ansari, K. Joint use of DSRC and C-V2X for V2X communications in the 5.9 GHz ITS band. IET Intell. Transp. Syst. 2021, 15, 213–224. [Google Scholar] [CrossRef]
- Peng, H.; Shen, X. Deep Reinforcement Learning Based Resource Management for Multi-Access Edge Computing in Vehicular Networks. IEEE Trans. Netw. Sci. Eng. 2020, 7, 2416–2428. [Google Scholar] [CrossRef]
- Fan, K.; Jiang, W.; Luo, Q.; Li, H.; Yang, Y. Cloud-based RFID mutual authentication scheme for efficient privacy preserving in IoV. J. Frankl. Inst. 2021, 358, 193–209. [Google Scholar] [CrossRef]
- Song, L.; Sun, G.; Yu, H.; Du, X.; Guizani, M. FBIA: A Fog-Based Identity Authentication Scheme for Privacy Preservation in Internet of Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 5403–5415. [Google Scholar] [CrossRef]
- He, X.; Wang, K.; Xu, W. QoE-Driven Content-Centric Caching with Deep Reinforcement Learning in Edge-Enabled IoT. IEEE Comput. Intell. Mag. 2019, 14, 12–20. [Google Scholar] [CrossRef]
- Ahangar, M.N.; Ahmed, Q.Z.; Khan, F.A.; Hafeez, M. A Survey of Autonomous Vehicles: Enabling Communication Technologies and Challenges. Sensors 2021, 21, 706. [Google Scholar] [CrossRef]
- Senouci, O.; Aliouat, Z.; Harous, S. A review of routing protocols in internet of vehicles and their challenges. Sens. Rev. 2019, 39, 58–70. [Google Scholar] [CrossRef]
- Du, Z.; Wu, C.; Yoshinaga, T.; Yau, K.-L.A.; Ji, Y.; Li, J. Federated Learning for Vehicular Internet of Things: Recent Advances and Open Issues. IEEE Open J. Comput. Soc. 2020, 1, 45–61. [Google Scholar] [CrossRef]
- Karoui, M.; Mamadou, A.M.; Chalhoub, G. A Novel Distributed Context-Aware Radio Access Technology Selection Scheme For C-ITS Networks. In Proceedings of the 2022 International Wireless Communications and Mobile Computing (IWCMC), Dubrovnik, Croatia, 30 May–3 June 2022; pp. 725–730. [Google Scholar]
- Khawam, K.; Lahoud, S.; Ibrahim, M.; Yassin, M.; Martin, S.; El Helou, M.; Moety, F. Radio access technology selection in heterogeneous networks. Phys. Commun. 2016, 18, 125–139. [Google Scholar] [CrossRef]
- Hussain, S.M.; Yusof, K.M.; Hussain, S.A. Artificial Intelligence-Based Network Selection and Optimized Routing in Internet of Vehicles. Transp. Telecommun. 2021, 22, 392–406. [Google Scholar] [CrossRef]
- Xu, Z.; Li, X.; Zhao, X.; Zhang, M.H.; Wang, Z. DSRC versus 4G-LTE for Connected Vehicle Applications: A Study on Field Experiments of Vehicular Communication Performance. J. Adv. Transp. 2017, 2017, e2750452. [Google Scholar] [CrossRef]
- Hussain, S.M.; Yusof, K.M.; Asuncion, R.; Hussain, S.A.; Ahmad, A. An Integrated Approach of 4G LTE and DSRC (IEEE 802.11p) for Internet of Vehicles (IoV) by Using a Novel Cluster-Based Efficient Radio Interface Selection Algorithm to Improve Vehicular Network (VN) Performance. In Proceedings of the Sustainable Advanced Computing; Aurelia, S., Hiremath, S.S., Subramanian, K., Biswas, S.K., Eds.; Springer: Singapore, 2022; pp. 569–583. [Google Scholar]
- Sherazi, H.H.R.; Khan, Z.A.; Iqbal, R.; Rizwan, S.; Imran, M.A.; Awan, K. A Heterogeneous IoV Architecture for Data Forwarding in Vehicle to Infrastructure Communication. Mob. Inf. Syst. 2019, 2019, e3101276. [Google Scholar] [CrossRef]
- Sanchez-Iborra, R.; Bernal-Escobedo, L.; Santa, J. Machine learning-based radio access technology selection in the Internet of moving things. China Commun. 2021, 18, 13–24. [Google Scholar] [CrossRef]
- Tuyisenge, L.; Ayaida, M.; Tohme, S.; Afilal, L.-E. A mobile internal vertical handover mechanism for distributed mobility management in VANETs. Veh. Commun. 2020, 26, 100277. [Google Scholar] [CrossRef]
- González, C.C.; Pupo, E.F.; Atzori, L.; Murroni, M. Dynamic Radio Access Selection and Slice Allocation for Differentiated Traffic Management on Future Mobile Networks. IEEE Trans. Netw. Serv. Manag. 2022. 16p. [Google Scholar] [CrossRef]
- Chowdhury, M.Z.; Shahjalal, M.; Ahmed, S.; Jang, Y.M. 6G Wireless Communication Systems: Applications, Requirements, Technologies, Challenges, and Research Directions. IEEE Open J. Commun. Soc. 2020, 1, 957–975. [Google Scholar] [CrossRef]
- Boussoufa-Lahlah, S.; Semchedine, F.; Bouallouche-Medjkoune, L. Geographic routing protocols for Vehicular Ad hoc NETworks (VANETs): A survey. Veh. Commun. 2018, 11, 20–31. [Google Scholar] [CrossRef]
- Ghaffari, A. Hybrid opportunistic and position-based routing protocol in vehicular ad hoc networks. J. Ambient Intell. Humaniz. Comput. 2020, 11, 1593–1603. [Google Scholar] [CrossRef]
- Agrawal, S.; Tyagi, N.; Iqbal, A.; Rao, R.S. An Intelligent Greedy Position-Based Multi-hop Routing Algorithm for Next-Hop Node Selection in VANETs. Proc. Natl. Acad. Sci. India Sect. Phys. Sci. 2020, 90, 39–47. [Google Scholar] [CrossRef]
- Sennan, S.; Ramasubbareddy, S.; Balasubramaniyam, S.; Nayyar, A.; Kerrache, C.A.; Bilal, M. MADCR: Mobility aware dynamic clustering-based routing protocol in Internet of Vehicles. China Commun. 2021, 18, 69–85. [Google Scholar] [CrossRef]
- Ye, M.; Guan, L.; Quddus, M. MPBRP- Mobility Prediction Based Routing Protocol in VANETs. In Proceedings of the 2019 International Conference on Advanced Communication Technologies and Networking (CommNet), Rabat, Morocco, 12–14 April 2019; pp. 1–7. [Google Scholar]
- Jaiswal, R.K. Position-based routing protocol using Kalman filter as a prediction module for vehicular ad hoc networks. Comput. Electr. Eng. 2020, 83, 106599. [Google Scholar] [CrossRef]
- Cheng, J.; Yuan, G.; Zhou, M.; Gao, S.; Huang, Z.; Liu, C. A Connectivity-Prediction-Based Dynamic Clustering Model for VANET in an Urban Scene. IEEE Internet Things J. 2020, 7, 8410–8418. [Google Scholar] [CrossRef]
- Liu, B.; Sheng, Y.; Shao, X.; Ji, Y.; Han, W.; Wang, E.; Xiong, S. Collaborative Intelligence Enabled Routing in Green IoV: A Grid and Vehicle Density Prediction Based Protocol. IEEE Trans. Green Commun. Netw. 2022. 11p. [Google Scholar] [CrossRef]
- Wu, C.; Liu, Z.; Liu, F.; Yoshinaga, T.; Ji, Y.; Li, J. Collaborative Learning of Communication Routes in Edge-Enabled Multi-Access Vehicular Environment. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 1155–1165. [Google Scholar] [CrossRef]
- Malhi, A.K.; Batra, S.; Pannu, H.S. Security of vehicular ad-hoc networks: A comprehensive survey. Comput. Secur. 2020, 89, 101664. [Google Scholar] [CrossRef]
- Gupta, D.S.; Karati, A.; Saad, W.; da Costa, D.B. Quantum-Defended Blockchain-Assisted Data Authentication Protocol for Internet of Vehicles. IEEE Trans. Veh. Technol. 2022, 71, 3255–3266. [Google Scholar] [CrossRef]
- Khodaei, M.; Papadimitratos, P. Scalable & Resilient Vehicle-Centric Certificate Revocation List Distribution in Vehicular Communication Systems. IEEE Trans. Mob. Comput. 2021, 20, 2473–2489. [Google Scholar] [CrossRef]
- Fan, K.; Pan, Q.; Zhang, K.; Bai, Y.; Sun, S.; Li, H.; Yang, Y. A Secure and Verifiable Data Sharing Scheme Based on Blockchain in Vehicular Social Networks. IEEE Trans. Veh. Technol. 2020, 69, 5826–5835. [Google Scholar] [CrossRef]
- Ma, Z.; Zhang, J.; Guo, Y.; Liu, Y.; Liu, X.; He, W. An Efficient Decentralized Key Management Mechanism for VANET with Blockchain. IEEE Trans. Veh. Technol. 2020, 69, 5836–5849. [Google Scholar] [CrossRef]
- Ma, M.; He, D.; Wang, H.; Kumar, N.; Choo, K.-K.R. An Efficient and Provably Secure Authenticated Key Agreement Protocol for Fog-Based Vehicular Ad-Hoc Networks. IEEE Internet Things J. 2019, 6, 8065–8075. [Google Scholar] [CrossRef]
- Wazid, M.; Bagga, P.; Das, A.K.; Shetty, S.; Rodrigues, J.J.P.C.; Park, Y. AKM-IoV: Authenticated Key Management Protocol in Fog Computing-Based Internet of Vehicles Deployment. IEEE Internet Things J. 2019, 6, 8804–8817. [Google Scholar] [CrossRef]
- Allouch, A.; Cheikhrouhou, O.; Koubâa, A.; Toumi, K.; Khalgui, M.; Nguyen Gia, T. UTM-Chain: Blockchain-Based Secure Unmanned Traffic Management for Internet of Drones. Sensors 2021, 21, 3049. [Google Scholar] [CrossRef]
- Jamil, F.; Cheikhrouhou, O.; Jamil, H.; Koubaa, A.; Derhab, A.; Ferrag, M.A. PetroBlock: A Blockchain-Based Payment Mechanism for Fueling Smart Vehicles. Appl. Sci. 2021, 11, 3055. [Google Scholar] [CrossRef]
- Inedjaren, Y.; Maachaoui, M.; Zeddini, B.; Barbot, J.-P. Blockchain-based distributed management system for trust in VANET. Veh. Commun. 2021, 30, 100350. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, K.; Hossain, E. Green Internet of Vehicles (IoV) in the 6G Era: Toward Sustainable Vehicular Communications and Networking. IEEE Trans. Green Commun. Netw. 2022, 6, 391–423. [Google Scholar] [CrossRef]
- Wang, X.; Ning, Z.; Hu, X.; Wang, L.; Guo, L.; Hu, B.; Wu, X. Future Communications and Energy Management in the Internet of Vehicles: Toward Intelligent Energy-Harvesting. IEEE Wirel. Commun. 2019, 26, 87–93. [Google Scholar] [CrossRef]
- Cesarano, L.; Croce, A.; Martins, L.D.C.; Tarchi, D.; Juan, A.A. A Real-Time Energy-Saving Mechanism in Internet of Vehicles Systems. IEEE Access 2021, 9, 157842–157858. [Google Scholar] [CrossRef]
- Sodhro, A.H.; Luo, Z.; Sodhro, G.H.; Muzamal, M.; Rodrigues, J.J.P.C.; de Albuquerque, V.H.C. Artificial Intelligence based QoS optimization for multimedia communication in IoV systems. Future Gener. Comput. Syst. 2019, 95, 667–680. [Google Scholar] [CrossRef]
- Taleb, T.; Samdanis, K.; Mada, B.; Flinck, H.; Dutta, S.; Sabella, D. On Multi-Access Edge Computing: A Survey of the Emerging 5G Network Edge Cloud Architecture and Orchestration. IEEE Commun. Surv. Tutor. 2017, 19, 1657–1681. [Google Scholar] [CrossRef]
- Feng, C.; Han, P.; Zhang, X.; Yang, B.; Liu, Y.; Guo, L. Computation offloading in mobile edge computing networks: A survey. J. Netw. Comput. Appl. 2022, 202, 103366. [Google Scholar] [CrossRef]
- Cao, B.; Zhang, J.; Liu, X.; Sun, Z.; Cao, W.; Nowak, R.M.; Lv, Z. Edge–Cloud Resource Scheduling in Space–Air–Ground-Integrated Networks for Internet of Vehicles. IEEE Internet Things J. 2022, 9, 5765–5772. [Google Scholar] [CrossRef]
- Xu, X.; Jiang, Q.; Zhang, P.; Cao, X.; Khosravi, M.R.; T. Alex, L.; Qi, L.; Dou, W. Game Theory for Distributed IoV Task Offloading with Fuzzy Neural Network in Edge Computing. IEEE Trans. Fuzzy Syst. 2022. 1p. [Google Scholar] [CrossRef]
- Xu, X.; Gu, R.; Dai, F.; Qi, L.; Wan, S. Multi-objective computation offloading for Internet of Vehicles in cloud-edge computing. Wirel. Netw. 2020, 26, 1611–1629. [Google Scholar] [CrossRef]
- Zhen, Y.; Chui, Y.; Zhang, P.; Liu, H. Multiauthority Attribute-Based Keyword Search over Cloud-Edge-End Collaboration in IoV. Wirel. Commun. Mob. Comput. 2022, 2022, e3513063. [Google Scholar] [CrossRef]
- Liu, W.; Xu, X.; Qi, L.; Zhang, X.; Dou, W. GoDeep: Intelligent IoV Service Deployment and Execution with Privacy Preservation in Cloud-edge Computing. In Proceedings of the 2021 IEEE International Conference on Web Services (ICWS), Virtual, 5–11 September 2021; pp. 579–587. [Google Scholar]
- Zhang, D.; Gong, C.; Zhang, T.; Zhang, J.; Piao, M. A new algorithm of clustering AODV based on edge computing strategy in IOV. Wirel. Netw. 2021, 27, 2891–2908. [Google Scholar] [CrossRef]
- Dai, C.; Liu, X.; Chen, W.; Lai, C.-F. A Low-Latency Object Detection Algorithm for the Edge Devices of IoV Systems. IEEE Trans. Veh. Technol. 2020, 69, 11169–11178. [Google Scholar] [CrossRef]
- Xu, X.; Fang, Z.; Zhang, J.; He, Q.; Yu, D.; Qi, L.; Dou, W. Edge Content Caching with Deep Spatiotemporal Residual Network for IoV in Smart City. ACM Trans. Sens. Netw. 2021, 17, 1–33. [Google Scholar] [CrossRef]
- Xiao, Y.; Liu, Y.; Li, T. Edge Computing and Blockchain for Quick Fake News Detection in IoV. Sensors 2020, 20, 4360. [Google Scholar] [CrossRef]
- Xu, X.; Fang, Z.; Qi, L.; Zhang, X.; He, Q.; Zhou, X. TripRes: Traffic Flow Prediction Driven Resource Reservation for Multimedia IoV with Edge Computing. ACM Trans. Multimed. Comput. Commun. Appl. 2021, 17, 1–21. [Google Scholar] [CrossRef]
- Zhao, J.; Li, Q.; Gong, Y.; Zhang, K. Computation Offloading and Resource Allocation For Cloud Assisted Mobile Edge Computing in Vehicular Networks. IEEE Trans. Veh. Technol. 2019, 68, 7944–7956. [Google Scholar] [CrossRef]
- Guo, J.; Luo, W.; Song, B.; Yu, F.R.; Du, X. Intelligence-Sharing Vehicular Networks with Mobile Edge Computing and Spatiotemporal Knowledge Transfer. IEEE Netw. 2020, 34, 256–262. [Google Scholar] [CrossRef]
- Qin, Z.; Leng, S.; Zhou, J.; Mao, S. Collaborative Edge Computing and Caching in Vehicular Networks. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Zhao, J.; Sun, X.; Li, Q.; Ma, X. Edge Caching and Computation Management for Real-Time Internet of Vehicles: An Online and Distributed Approach. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2183–2197. [Google Scholar] [CrossRef]
- Gu, X.; Zhang, G. Energy-efficient computation offloading for vehicular edge computing networks. Comput. Commun. 2021, 166, 244–253. [Google Scholar] [CrossRef]
- Moon, H.; Baek, K.; Ko, I.-Y. Cache-Sharing Distributed Service Registry for Highly Dynamic V2X Environments. In Proceedings of the 2020 IEEE 44th Annual Computers, Software and Applications Conference (COMPSAC), Madrid, Spain, 13–17 July 2020; pp. 1123–1124. [Google Scholar]
- Qiao, G.; Leng, S.; Maharjan, S.; Zhang, Y.; Ansari, N. Deep Reinforcement Learning for Cooperative Content Caching in Vehicular Edge Computing and Networks. IEEE Internet Things J. 2020, 7, 247–257. [Google Scholar] [CrossRef]
- Ning, Z.; Huang, J.; Wang, X.; Rodrigues, J.J.P.C.; Guo, L. Mobile Edge Computing-Enabled Internet of Vehicles: Toward Energy-Efficient Scheduling. IEEE Netw. 2019, 33, 198–205. [Google Scholar] [CrossRef]
- Zhai, Y.; Sun, W.; Wu, J.; Zhu, L.; Shen, J.; Du, X.; Guizani, M. An Energy Aware Offloading Scheme for Interdependent Applications in Software-Defined IoV with Fog Computing Architecture. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3813–3823. [Google Scholar] [CrossRef]
- Michailidis, E.T.; Miridakis, N.I.; Michalas, A.; Skondras, E.; Vergados, D.J. Energy Optimization in Dual-RIS UAV-Aided MEC-Enabled Internet of Vehicles. Sensors 2021, 21, 4392. [Google Scholar] [CrossRef] [PubMed]
- Shen, X.; Yu, H.; Liu, X.; Bin, Q.; Luhach, A.K.; Saravanan, V. The optimized energy-efficient sensible edge processing model for the internet of vehicles in smart cities. Sustain. Energy Technol. Assess. 2021, 47, 101477. [Google Scholar] [CrossRef]
- Piromalis, D.; Kantaros, A. Digital Twins in the Automotive Industry: The Road toward Physical-Digital Convergence. Appl. Syst. Innov. 2022, 5, 65. [Google Scholar] [CrossRef]
- Liu, T.; Tang, L.; Wang, W.; Chen, Q.; Zeng, X. Digital-Twin-Assisted Task Offloading Based on Edge Collaboration in the Digital Twin Edge Network. IEEE Internet Things J. 2022, 9, 1427–1444. [Google Scholar] [CrossRef]
- Xu, X.; Shen, B.; Ding, S.; Srivastava, G.; Bilal, M.; Khosravi, M.R.; Menon, V.G.; Jan, M.A.; Wang, M. Service Offloading with Deep Q-Network for Digital Twinning-Empowered Internet of Vehicles in Edge Computing. IEEE Trans. Ind. Inform. 2022, 18, 1414–1423. [Google Scholar] [CrossRef]
- Sun, W.; Wang, P.; Xu, N.; Wang, G.; Zhang, Y. Dynamic Digital Twin and Distributed Incentives for Resource Allocation in Aerial-Assisted Internet of Vehicles. IEEE Internet Things J. 2022, 9, 5839–5852. [Google Scholar] [CrossRef]
- Lim, W.Y.B.; Luong, N.C.; Hoang, D.T.; Jiao, Y.; Liang, Y.-C.; Yang, Q.; Niyato, D.; Miao, C. Federated Learning in Mobile Edge Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2020, 22, 2031–2063. [Google Scholar] [CrossRef]
- Abreha, H.G.; Hayajneh, M.; Serhani, M.A. Federated Learning in Edge Computing: A Systematic Survey. Sensors 2022, 22, 450. [Google Scholar] [CrossRef]
- Pokhrel, S.R.; Choi, J. Improving TCP Performance Over WiFi for Internet of Vehicles: A Federated Learning Approach. IEEE Trans. Veh. Technol. 2020, 69, 6798–6802. [Google Scholar] [CrossRef]
- Xiong, K.; Leng, S.; Huang, C.; Yuen, C.; Guan, Y.L. Intelligent Task Offloading for Heterogeneous V2X Communications. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2226–2238. [Google Scholar] [CrossRef]
- Fadlullah, Z.M.; Kato, N. HCP: Heterogeneous Computing Platform for Federated Learning Based Collaborative Content Caching Towards 6G Networks. IEEE Trans. Emerg. Top. Comput. 2022, 10, 112–123. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, Y.; Wang, L.; Liu, Y.; Li, L.; Zheng, N. Joint Intelligence Ranking by Federated Multiplicative Update. IEEE Intell. Syst. 2020, 35, 15–24. [Google Scholar] [CrossRef]
- Yu, S.; Chen, X.; Zhou, Z.; Gong, X.; Wu, D. When Deep Reinforcement Learning Meets Federated Learning: Intelligent Multitimescale Resource Management for Multiaccess Edge Computing in 5G Ultradense Network. IEEE Internet Things J. 2021, 8, 2238–2251. [Google Scholar] [CrossRef]
- Shiri, H.; Park, J.; Bennis, M. Communication-Efficient Massive UAV Online Path Control: Federated Learning Meets Mean-Field Game Theory. IEEE Trans. Commun. 2020, 68, 6840–6857. [Google Scholar] [CrossRef]
- Sun, W.; Xu, N.; Wang, L.; Zhang, H.; Zhang, Y. Dynamic Digital Twin and Federated Learning with Incentives for Air-Ground Networks. IEEE Trans. Netw. Sci. Eng. 2022, 9, 321–333. [Google Scholar] [CrossRef]
- Ye, D.; Yu, R.; Pan, M.; Han, Z. Federated Learning in Vehicular Edge Computing: A Selective Model Aggregation Approach. IEEE Access 2020, 8, 23920–23935. [Google Scholar] [CrossRef]
- Zhang, H.; Hanzo, L. Federated Learning Assisted Multi-UAV Networks. IEEE Trans. Veh. Technol. 2020, 69, 14104–14109. [Google Scholar] [CrossRef]
- Saputra, Y.M.; Nguyen, D.; Dinh, H.T.; Vu, T.X.; Dutkiewicz, E.; Chatzinotas, S. Federated Learning Meets Contract Theory: Economic-Efficiency Framework for Electric Vehicle Networks. IEEE Trans. Mob. Comput. 2022, 21, 2803–2817. [Google Scholar] [CrossRef]
- Liu, Y.; Nie, J.; Li, X.; Ahmed, S.H.; Lim, W.Y.B.; Miao, C. Federated Learning in the Sky: Aerial-Ground Air Quality Sensing Framework with UAV Swarms. IEEE Internet Things J. 2021, 8, 9827–9837. [Google Scholar] [CrossRef]
- Thorgeirsson, A.T.; Scheubner, S.; Funfgeld, S.; Gauterin, F. Probabilistic Prediction of Energy Demand and Driving Range for Electric Vehicles with Federated Learning. IEEE Open J. Veh. Technol. 2021, 2, 151–161. [Google Scholar] [CrossRef]
- Wang, Y.; Su, Z.; Zhang, N.; Benslimane, A. Learning in the Air: Secure Federated Learning for UAV-Assisted Crowdsensing. IEEE Trans. Netw. Sci. Eng. 2021, 8, 1055–1069. [Google Scholar] [CrossRef]
- Chai, H.; Leng, S.; Chen, Y.; Zhang, K. A Hierarchical Blockchain-Enabled Federated Learning Algorithm for Knowledge Sharing in Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3975–3986. [Google Scholar] [CrossRef]
- Lu, Y.; Huang, X.; Zhang, K.; Maharjan, S.; Zhang, Y. Blockchain Empowered Asynchronous Federated Learning for Secure Data Sharing in Internet of Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 4298–4311. [Google Scholar] [CrossRef]
- Yu, Z.; Hu, J.; Min, G.; Zhao, Z.; Miao, W.; Hossain, M.S. Mobility-Aware Proactive Edge Caching for Connected Vehicles Using Federated Learning. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5341–5351. [Google Scholar] [CrossRef]
- Lim, W.Y.B.; Huang, J.; Xiong, Z.; Kang, J.; Niyato, D.; Hua, X.-S.; Leung, C.; Miao, C. Towards Federated Learning in UAV-Enabled Internet of Vehicles: A Multi-Dimensional Contract-Matching Approach. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5140–5154. [Google Scholar] [CrossRef]
- Mowla, N.I.; Tran, N.H.; Doh, I.; Chae, K. AFRL: Adaptive federated reinforcement learning for intelligent jamming defense in FANET. J. Commun. Netw. 2020, 22, 244–258. [Google Scholar] [CrossRef]
- Pokhrel, S.R.; Choi, J. Federated Learning with Blockchain for Autonomous Vehicles: Analysis and Design Challenges. IEEE Trans. Commun. 2020, 68, 4734–4746. [Google Scholar] [CrossRef]
- Pham, Q.-V.; Zeng, M.; Ruby, R.; Huynh-The, T.; Hwang, W.-J. UAV Communications for Sustainable Federated Learning. IEEE Trans. Veh. Technol. 2021, 70, 3944–3948. [Google Scholar] [CrossRef]
- Rihan, M.; Elwekeil, M.; Yang, Y.; Huang, L.; Xu, C.; Selim, M.M. Deep-VFog: When Artificial Intelligence Meets Fog Computing in V2X. IEEE Syst. J. 2021, 15, 3492–3505. [Google Scholar] [CrossRef]
- Yang, H.H.; Liu, Z.; Quek, T.Q.S.; Poor, H.V. Scheduling Policies for Federated Learning in Wireless Networks. IEEE Trans. Commun. 2020, 68, 317–333. [Google Scholar] [CrossRef]
- Yang, K.; Jiang, T.; Shi, Y.; Ding, Z. Federated Learning via Over-the-Air Computation. IEEE Trans. Wirel. Commun. 2020, 19, 2022–2035. [Google Scholar] [CrossRef]
- Ng, J.S.; Lim, W.Y.B.; Dai, H.-N.; Xiong, Z.; Huang, J.; Niyato, D.; Hua, X.-S.; Leung, C.; Miao, C. Joint Auction-Coalition Formation Framework for Communication-Efficient Federated Learning in UAV-Enabled Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2326–2344. [Google Scholar] [CrossRef]
- Jiang, Y.; Yin, S. Recursive Total Principle Component Regression Based Fault Detection and Its Application to Vehicular Cyber-Physical Systems. IEEE Trans. Ind. Inform. 2018, 14, 1415–1423. [Google Scholar] [CrossRef]
- Alamgir, M.S.M.; Sultana, M.N.; Chang, K. Link Adaptation on an Underwater Communications Network Using Machine Learning Algorithms: Boosted Regression Tree Approach. IEEE Access 2020, 8, 73957–73971. [Google Scholar] [CrossRef]
- Valle, F.; Cespedes, S.; Hafid, A.S. Automated Decision System to Exploit Network Diversity for Connected Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 858–871. [Google Scholar] [CrossRef]
- Zhang, C.; Li, R.; Kim, W.; Yoon, D.; Patras, P. Driver Behavior Recognition via Interwoven Deep Convolutional Neural Nets with Multi-Stream Inputs. IEEE Access 2020, 8, 191138–191151. [Google Scholar] [CrossRef]
- Ferreira, D.; Reis, A.; Senna, C.; Sargento, S. A Forecasting Approach to Improve Control and Management for 5G Networks. IEEE Trans. Netw. Serv. Manag. 2021, 18, 1817–1831. [Google Scholar] [CrossRef]
- Raja, G.; Anbalagan, S.; Vijayaraghavan, G.; Theerthagiri, S.; Suryanarayan, S.V.; Wu, X.-W. SP-CIDS: Secure and Private Collaborative IDS for VANETs. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4385–4393. [Google Scholar] [CrossRef]
- Min, D.; Kim, D.; Park, J.; Huh, K. RNN-Based Path Prediction of Obstacle Vehicles with Deep Ensemble. IEEE Trans. Veh. Technol. 2019, 68, 10252–10256. [Google Scholar] [CrossRef]
- Toprak, T.; Belenlioglu, B.; Aydin, B.; Guzelis, C.; Selver, M.A. Conditional Weighted Ensemble of Transferred Models for Camera Based Onboard Pedestrian Detection in Railway Driver Support Systems. IEEE Trans. Veh. Technol. 2020, 69, 5041–5054. [Google Scholar] [CrossRef]
- Zhao, F.; Zeng, G.-Q.; Lu, K.-D. EnLSTM-WPEO: Short-Term Traffic Flow Prediction by Ensemble LSTM, NNCT Weight Integration, and Population Extremal Optimization. IEEE Trans. Veh. Technol. 2020, 69, 101–113. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, Y.; Cui, Z.; Zhang, W.; Chen, J. A Many-objective Optimization based Intelligent Intrusion Detection Algorithm for Enhancing Security of Vehicular Networks in 6G. IEEE Trans. Veh. Technol. 2021, 70, 5234–5243. [Google Scholar] [CrossRef]
- Alotaibi, B. Transportation Mode Detection by Embedded Sensors Based on Ensemble Learning. IEEE Access 2020, 8, 145552–145563. [Google Scholar] [CrossRef]
- Wang, Q.; Wan, J.; Li, X. Robust Hierarchical Deep Learning for Vehicular Management. IEEE Trans. Veh. Technol. 2019, 68, 4148–4156. [Google Scholar] [CrossRef]
- Yousif, B.B.; Ata, M.M.; Fawzy, N.; Obaya, M. Toward an Optimized Neutrosophic k-Means with Genetic Algorithm for Automatic Vehicle License Plate Recognition (ONKM-AVLPR). IEEE Access 2020, 8, 49285–49312. [Google Scholar] [CrossRef]
- Pustokhina, I.V.; Pustokhin, D.A.; Rodrigues, J.J.P.C.; Gupta, D.; Khanna, A.; Shankar, K.; Seo, C.; Joshi, G.P. Automatic Vehicle License Plate Recognition Using Optimal K-Means with Convolutional Neural Network for Intelligent Transportation Systems. IEEE Access 2020, 8, 92907–92917. [Google Scholar] [CrossRef]
- Yang, S.; Wang, W.; Lu, C.; Gong, J.; Xi, J. A Time-Efficient Approach for Decision-Making Style Recognition in Lane-Changing Behavior. IEEE Trans. Hum.-Mach. Syst. 2019, 49, 579–588. [Google Scholar] [CrossRef]
- Rong, H.; Ramirez-Serrano, A.; Guan, L.; Cong, X. Robust RGB-D SLAM for Dynamic Environments Based on YOLOv4. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020. 6p. [Google Scholar] [CrossRef]
- Bhaumik, S.; Prokes, A.; Chandra, A. Combined K-Means and Amplitude Clustering of Impulse Response for 60 GHz Vehicular Channels. In Proceedings of the 15th International Symposium on Wireless Communication Systems (ISWCS), Lisbon, Portugal, 28–31 August 2018; pp. 1–5. [Google Scholar]
- Gedschold, J.; Schneider, C.; Kaske, M.; Thoma, R.S.; Galdo, G.D.; Boban, M.; Luo, J. Tracking based Multipath Clustering in Vehicle-to-Infrastructure Channels. In Proceedings of the 2018 IEEE 29th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 9–12 September 2018; pp. 68–72. [Google Scholar] [CrossRef]
- Song, W.; Zeng, F.; Hu, J.; Wang, Z.; Mao, X. An Unsupervised-Learning-Based Method for Multi-Hop Wireless Broadcast Relay Selection in Urban Vehicular Networks. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Sliwa, B.; Adam, R.; Wietfeld, C. Client-Based Intelligence for Resource Efficient Vehicular Big Data Transfer in Future 6G Networks. IEEE Trans. Veh. Technol. 2021, 70, 5332–5346. [Google Scholar] [CrossRef]
- Shehzad, M.K.; Hassan, S.A.; Mahmood, A.; Gidlund, M. On the Association of Small Cell Base Stations with UAVs Using Unsupervised Learning. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–5. [Google Scholar]
- Hoang, T.M.; Nguyen, N.M.; Duong, T.Q. Detection of Eavesdropping Attack in UAV-Aided Wireless Systems: Unsupervised Learning with One-Class SVM and K-Means Clustering. IEEE Wirel. Commun. Lett. 2020, 9, 139–142. [Google Scholar] [CrossRef]
- Albakay, N.; Hempel, M.; Alahmad, M.; Sharif, H. Novel Frequency Offset Estimation Scheme for Reliable Wireless Communication using Modified K-Means Clustering. In Proceedings of the 15th International Wireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 826–829. [Google Scholar]
- He, J.; Wang, J.; Zhu, H.; Gomes, N.J.; Cheng, W.; Yue, P.; Yi, X. Machine Learning based Network Planning in Drone Aided Emergency Communications. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020. 5p. [Google Scholar]
- Ye, L.; Chen, Y.; Han, Q.; Zeng, L.; Cheng, S.; Xiao, L.; Ding, X. Vehicle Message Distribution Mechanism Based on Improved K-means Adaptive Clustering Algorithm. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020. 6p. [Google Scholar]
- Cui, Y.; Zheng, H.; Wang, H.; Wu, D. An Intelligent Coordinator Design for Network Slicing in Service-Oriented Vehicular Networks. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020. 6p. [Google Scholar]
- Ozasa, M.; Nakazato, J.; Hirata, K.; Tran, G.K.; Sakaguchi, K. Design of Millimeter-wave UAV Base Station for Access Link. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020. 5p. [Google Scholar]
- Wahlstrom, J.; Skog, I.; Handel, P.; Bradley, B.; Madden, S.; Balakrishnan, H. Smartphone Placement Within Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 669–679. [Google Scholar] [CrossRef]
- Yuan, M.; Kan, X.; Chi, C.-H.; Cao, L.; Shu, H.; Fan, Y.; Yao, W. Study of Driving Cycle of City Tour Bus Based on Coupled GA-K-Means and HMM Algorithms: A Case Study in Beijing. IEEE Access 2021, 9, 20331–20345. [Google Scholar] [CrossRef]
- Forster, D.; Inderka, R.B.; Gauterin, F. Data-Driven Identification of Characteristic Real-Driving Cycles Based on k-Means Clustering and Mixed-Integer Optimization. IEEE Trans. Veh. Technol. 2020, 69, 2398–2410. [Google Scholar] [CrossRef]
- Ren, Y.; Xu, R. An Adaptive Clustering Scheme Based on Modified Density-Based Spatial Clustering of Applications with Noise Algorithm in Ultra-Dense Networks. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019. 5p. [Google Scholar]
- Cao, L.; Wang, T.; Wang, D.; Du, K.; Liu, Y.; Fu, C. Lane Determination of Vehicles Based on a Novel Clustering Algorithm for Intelligent Traffic Monitoring. IEEE Access 2019, 8, 63004–63017. [Google Scholar] [CrossRef]
- Tan, H.; Gui, Z.; Chung, I. A Secure and Efficient Certificateless Authentication Scheme with Unsupervised Anomaly Detection in VANETs. IEEE Access 2018, 6, 74260–74276. [Google Scholar] [CrossRef]
- Chen, Z.; Yang, C.; Fang, S. A Convolutional Neural Network-Based Driving Cycle Prediction Method for Plug-in Hybrid Electric Vehicles with Bus Route. IEEE Access 2019, 6, 3255–3264. [Google Scholar] [CrossRef]
- Guo, J.; Li, X.; Liu, Z.; Ma, J.; Yang, C.; Zhang, J.; Wu, D. TROVE: A Context-Awareness Trust Model for VANETs Using Reinforcement Learning. IEEE Internet Things J. 2020, 7, 6647–6662. [Google Scholar] [CrossRef]
- Yu, C.; Wang, X.; Xu, X.; Zhang, M.; Ge, H.; Ren, J.; Sun, L.; Chen, B.; Tan, G. Distributed Multiagent Coordinated Learning for Autonomous Driving in Highways Based on Dynamic Coordination Graphs. IEEE Trans. Intell. Transp. Syst. 2020, 21, 735–748. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, W.; Wang, T.; Lei, Y.; Zhong, F. Bayesian Reinforcement Learning for Multi-Robot Decentralized Patrolling in Uncertain Environments. IEEE Trans. Veh. Technol. 2020, 68, 11691–11703. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, L.; Gao, B.; Qu, T.; Chen, H. Deterministic Promotion Reinforcement Learning Applied to Longitudinal Velocity Control for Automated Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 338–348. [Google Scholar] [CrossRef]
- Feng, S.; Haykin, S. Cognitive Risk Control for Anti-Jamming V2V Communications in Autonomous Vehicle Networks. IEEE Trans. Veh. Technol. 2019, 68, 9920–9934. [Google Scholar] [CrossRef]
- Xing, R.; Su, Z.; Zhang, N.; Peng, Y.; Pu, H.; Luo, J. Trust-Evaluation-Based Intrusion Detection and Reinforcement Learning in Autonomous Driving. IEEE Netw. 2019, 33, 54–60. [Google Scholar] [CrossRef]
- Kapoor, S.; Grace, D.; Clarke, T. User Association in Ultra-Dense Small Cell Dynamic Vehicular Networks: A Reinforcement Learning Approach. J. Commun. Inf. Netw. 2019, 4, 1–12. [Google Scholar] [CrossRef]
- Zhou, Y.; Tang, F.; Kawamoto, Y.; Kato, N. Reinforcement Learning-Based Radio Resource Control in 5G Vehicular Network. IEEE Wirel. Commun. Lett. 2020, 9, 611–614. [Google Scholar] [CrossRef]
- Wu, J.; Fang, M.; Li, H.; Li, X. RSU-Assisted Traffic-Aware Routing Based on Reinforcement Learning for Urban Vanets. IEEE Access 2020, 8, 5733–5748. [Google Scholar] [CrossRef]
- Samir, M.; Ebrahimi, D.; Assi, C.; Sharafeddine, S.; Ghrayeb, A. Trajectory Planning of Multiple Dronecells in Vehicular Networks: A Reinforcement Learning Approach. IEEE Netw. Lett. 2020, 2, 14–18. [Google Scholar] [CrossRef]
- Raja, G.; Ganapathisubramaniyan, A.; Anbalagan, S.; Baskaran, S.B.M.; Raja, K.; Bashir, A.K. Intelligent Reward-Based Data Offloading in Next-Generation Vehicular Networks. IEEE Internet Things J. 2020, 7, 3747–3758. [Google Scholar] [CrossRef]
- Cao, Z.; Guo, H.; Song, W.; Gao, K.; Chen, Z.; Zhang, L.; Zhang, X. Using Reinforcement Learning to Minimize the Probability of Delay Occurrence in Transportation. IEEE Trans. Veh. Technol. 2020, 69, 2424–2436. [Google Scholar] [CrossRef]
- Zhang, Q.; Wu, K.; Shi, Y. Route Planning and Power Management for PHEVs with Reinforcement Learning. IEEE Trans. Veh. Technol. 2020, 69, 4751–4762. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Danba, S.; Bao, J.; Han, G.; Guleng, S.; Wu, C. Toward Collaborative Intelligence in IoV Systems: Recent Advances and Open Issues. Sensors 2022, 22, 6995. https://doi.org/10.3390/s22186995
Danba S, Bao J, Han G, Guleng S, Wu C. Toward Collaborative Intelligence in IoV Systems: Recent Advances and Open Issues. Sensors. 2022; 22(18):6995. https://doi.org/10.3390/s22186995
Chicago/Turabian StyleDanba, Sedeng, Jingjing Bao, Guorong Han, Siri Guleng, and Celimuge Wu. 2022. "Toward Collaborative Intelligence in IoV Systems: Recent Advances and Open Issues" Sensors 22, no. 18: 6995. https://doi.org/10.3390/s22186995
APA StyleDanba, S., Bao, J., Han, G., Guleng, S., & Wu, C. (2022). Toward Collaborative Intelligence in IoV Systems: Recent Advances and Open Issues. Sensors, 22(18), 6995. https://doi.org/10.3390/s22186995