

Prediction Models for Railway Track Geometry Degradation Using Machine Learning Methods: A Review


Abstract
:1. Introduction
2. Traditional Prediction Methods
2.1. Prediction Models Based on Empirical Formulas
2.2. Prediction Models Based on Statistical Analysis
2.2.1. Linear, Multi-Stage Linear, and Exponential Prediction Models
2.2.2. Prediction Models Based on Stochastic Processes
- Models need a large sample of inspection data to reach an acceptable level of accuracy.
- Models are barely updated with new inspection data.
- Models lack a mechanical understanding of the relationship between factors, sometimes resulting in some unrealistic results [7].
3. Prediction Methods Based on Machine Learning
3.1. Prediction Models Based on Probabilistic Method
3.1.1. Prediction Models Based on Markov Theory
3.1.2. Prediction Models Based on Bayesian Theory
3.1.3. Prediction Models Based on Monte Carlo Algorithm
3.2. Prediction Models Based on ANN
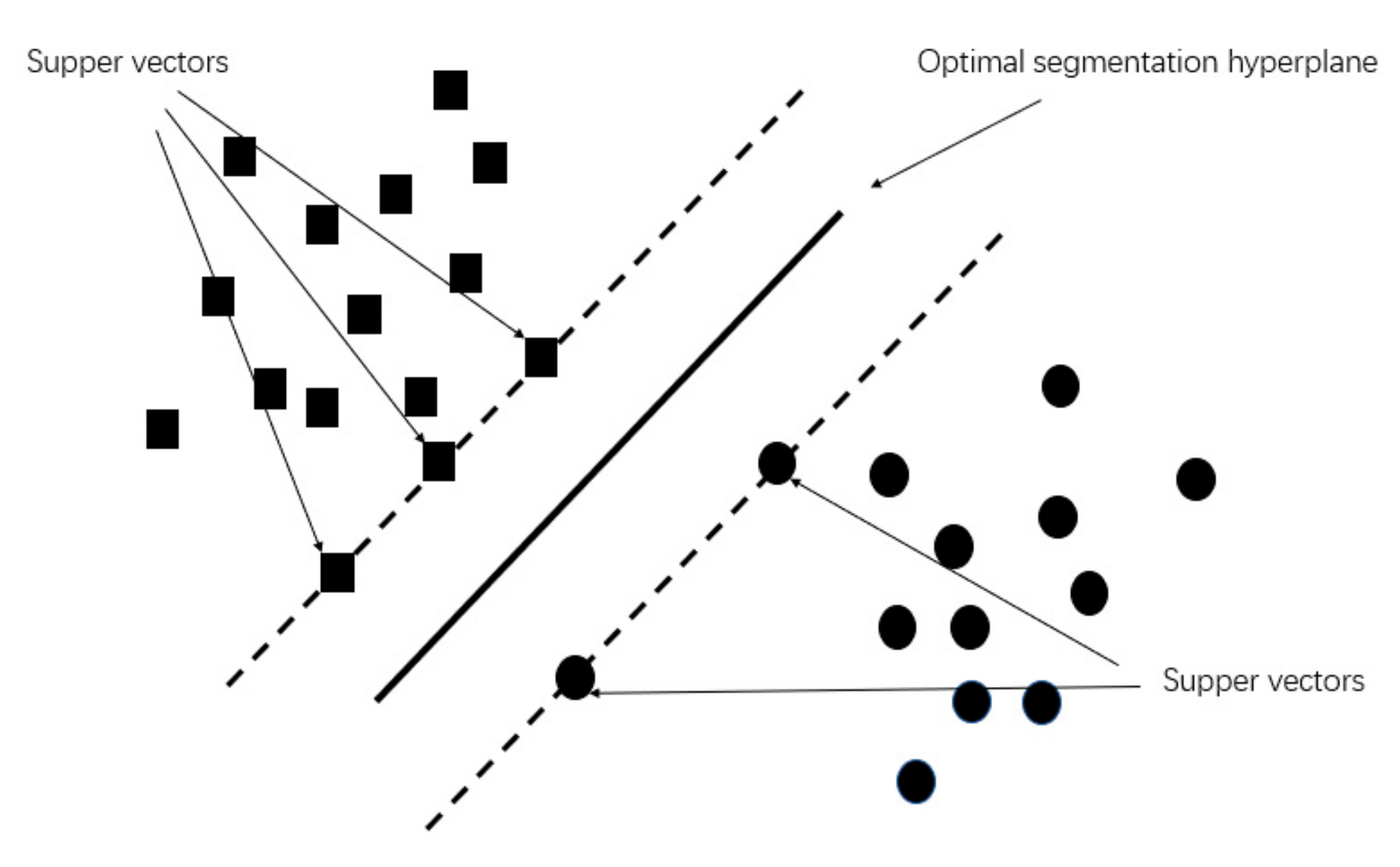
3.3. Prediction Models Based on SVM
3.4. Prediction Models Based on GM
4. Discussions and Perspectives
4.1. Pros and Cons of Prediction Models
- There are three limitations in Markov models: (1) The model is discrete while the track geometric is continuous, which may lead to inaccurate prediction. (2) Defining a large number of discrete states for track degradation leads to a complex calculation using a stochastic matrix. (3) When using different stochastic matrices for track sections, the complexity of Markov models is even further increased.
- The limitation of the Bayesian model is that the prior probability distributions of fitting track degradation parameters are assumed to be independent, while the prior probability distributions are not completely independent in practice. This assumption may lead to lower prediction accuracy.
- Monte Carlo models usually require many calculation steps and are commonly used together with other models to predict track degradation.
- ANN models can study the correlation between input and output variables and identify the key factors for track degradation, which can simplify the prediction model and improve computational efficiency.
- ANN models have a strong computational capability and can process a larger amount of track detection data, which are suitable for predicting large-batch track geometry data.
- ANN models can learn hidden relationships in data without imposing any fixed relationships on the data, which are robust to predict the track geometry data with drastic fluctuations.
- ANN models are relatively simple compared to other Neural Network models [6], such as the CNN, RNN, and DNN models, etc.
- A large amount of high-quality inspection data is required for ANN models as training data. ANN models cannot work when track geometry data is insufficient.
- ANN models have high complexity and are consequently difficult to interpret. The prediction results can lack theoretical explanation and have poor generalisation performance due to extrapolation and observational biases.
- The parameters of ANN models are commonly determined by researchers using a trial-and-error way, which is time-consuming and causes the performance of ANN models to vary from person to person.
- Because ANN models have a low convergence speed and easily fall into local optimum, the theory and learning algorithm of the ANN models need to be further improved.
- SVM models can consider many factors for track degradation because the complexity of SVM is irrelevant to the dimension of input variables.
- SVM models can still achieve high prediction accuracy when the sample amount (inspection data) is limited.
- SVM models are good at predicting track geometry data with nonlinearity and high dimensions.
4.2. Recommendations for Future Research
- The current machine learning-based track degradation prediction models, such as ANN and SVM, effectively solve problems but remain rather opaque about how they actually solve them [19]. The results can lack theoretical explanation and have poor generalisation performance due to extrapolation and observational biases. Therefore, machine learning models should be combined with mechanical models or empirical models in future research. For instance, the mechanical models or empirical models can be used to check whether predicted TQI or track geometry are within the reasonable limit or proportional to other variables.
- In the current machine learning-based track degradation prediction models, the tracks are commonly divided into sections of a fixed length, e.g., 50 m or 200 m. The track in a section is assumed to be the same. However, the track can be very different within a section. Therefore, track sections in prediction models should be divided according to features instead.
- The performance of machine learning models is strongly determined by the values of hyperparameters. However, the hyperparameters used in the current track degradation prediction models are determined by researchers using a trial-and-error approach, which is time-consuming. Therefore, the theory of automatically determining hyperparameters should be studied.
- In the existing studies, the proposed machine learning-based prediction models are tested on individual railway tracks. Therefore, the generalisation performance of the models is unclear. The models should be tested for railway tracks of different types in future research to improve the generalisation performance.
- Generally speaking, it requires certain knowledge of computer science to properly use the prediction results of machine learning models, which may be challenging for some maintenance staff or inspectors. Therefore, the prediction models should be further integrated into simple applications to improve usability.
- Other advanced machine learning methods can also be combined into track degradation prediction models for track inspection data with large-size, multi-source, high-fluctuation, and high-noise. For instance, Deep Learning has been used in other engineering fields [59,81,132], but rarely for track degradation.
5. Concluding Remarks
- Machine learning-based prediction models should be combined with mechanical models or empirical models, which can give a theoretical explanation for the prediction results of the prediction models and enhance the generalisation performance of the prediction models. For instance, the mechanical models or empirical models can be used to check whether predicted TQI or track geometry are within the reasonable limit or proportional to other variables.
- Track sections in prediction models should be divided according to features, which can fully consider the differences of track sections to achieve fine modelling. For instance, special track sections (such as turnout zones, transition zones, etc.) can be distinguished from other track sections.
- The theory of automatically determining hyperparameters should be studied, which can achieve automatic adjustment of hyperparameters for different track geometry datasets and provide excellent prediction accuracy. For instance, the Random Search algorithm built into KerasTuner (a deep learning Application Programming Interface (API) written in Python) can be used to automatically find the best hyperparameters of the SVM or ANN models for track degradation prediction.
- Prediction models should be tested for railway tracks of different types, which can improve the generalisation performance of the prediction models. For instance, the same prediction model can be used to predict the degradation of passenger and freight railway tracks, respectively, and analyse and compare the prediction results.
- Prediction models should be further integrated into simple applications, which can allow the prediction models to be widely accepted by railway companies and used to plan maintenance activities. For instance, predictive models can be integrated into software on portable mobile phones.
- Other advanced machine learning methods can be used, such as Deep Learning, which can be used to better predict the track inspection data with large-size, multi-source, high-fluctuation, and high-noise. For instance, the Deep Neural Network (DNN) model can be used to predict track degradation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hsu, H.-H.; Chang, C.-Y.; Hsu, C.-H. Big Data Analytics for Sensor-Network Collected Intelligence; Morgan Kaufmann: Burlington, MA, USA, 2017. [Google Scholar]
- Berggren, E.G.; Li, M.X.D.; Spännar, J. A New Approach to the Analysis and Presentation of Vertical Track Geometry Quality and Rail Roughness. Wear 2008, 265, 1488–1496. [Google Scholar] [CrossRef]
- UIC (International Union of Railways). Best Practice Guide for Optimum. In Proceedings of the Edition Techniques Ferroviaires; UIC: Paris, France, 2008. [Google Scholar]
- Khajehei, H.; Ahmadi, A.; Soleimanmeigouni, I.; Nissen, A. Allocation of Effective Maintenance Limit for Railway Track Geometry. Struct. Infrastruct. Eng. 2019, 15, 1597–1612. [Google Scholar] [CrossRef]
- Sadeghi, J.; Askarinejad, H. Development of Improved Railway Track Degradation Models. Struct. Infrastruct. Eng. 2010, 6, 675–688. [Google Scholar] [CrossRef]
- Andrade, A.R.; Teixeira, P.F. Uncertainty in Rail-Track Geometry Degradation: Lisbon-Oporto Line Case Study. J. Transp. Eng. 2010, 137, 193–200. [Google Scholar] [CrossRef]
- Weston, P.F.; Ling, C.S.; Goodman, C.J.; Roberts, C.; Li, P.; Goodall, R.M. Monitoring Lateral Track Irregularity from In-Service Railway Vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2007, 221, 89–100. [Google Scholar] [CrossRef]
- Weston, P.F.; Ling, C.S.; Roberts, C.; Goodman, C.J.; Li, P.; Goodall, R.M. Monitoring Vertical Track Irregularity from In-Service Railway Vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2007, 221, 75–88. [Google Scholar] [CrossRef]
- Esveld, C. Modern Railway Track; MRT-Productions: Zaltbommel, The Netherlands, 2001; ISBN 9789080032439. [Google Scholar]
- Odashima, M.; Azami, S.; Naganuma, Y.; Mori, H.; Tsunashima, H. Track geometry estimation of a conventional railway from car-body acceleration measurement. Mech. Eng. J. 2017, 4, 16–00498. [Google Scholar] [CrossRef]
- Wang, B. Research on Management and Prediction for Track Quality Based on the Railway Unit. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2016. [Google Scholar]
- Hamid, A.; Gross, A. Track-Quality Indices and Track-Degradation Models for Maintenance-of-Way Planning. Transp. Res. Rec. 1981, 802, 2–8. [Google Scholar]
- Sadeghi, J. Development of Railway Track Geometry Indexes Based on Statistical Distribution of Geometry Data. J. Transp. Eng. 2010, 136, 693–700. [Google Scholar] [CrossRef]
- Sadeghi, J.; Fathali, M.; Boloukian, N. Development of a New Track Geometry Assessment Technique Incorporating Rail Cant Factor. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2008, 223, 255–263. [Google Scholar] [CrossRef]
- Sadeghi, J.; Askarinejad, H. An Investigation into the Effects of Track Structural Conditions on Railway Track Geometry Deviations. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2009, 223, 415–425. [Google Scholar] [CrossRef]
- Sadeghi, J.M.; Askarinejad, H. Development of Track Condition Assessment Model Based on Visual Inspection. Struct. Infrastruct. Eng. 2011, 7, 895–905. [Google Scholar] [CrossRef]
- Li, M.X.D.; Berggren, E.G.; Berg, M.; Persson, I. Assessing Track Geometry Quality Based on Wavelength Spectra and Track-Vehicle Dynamic Interaction. Veh. Syst. Dyn. 2008, 46, 261–276. [Google Scholar] [CrossRef]
- Peng, F.; Ouyang, Y.; Somani, K. Optimal Routing and Scheduling of Periodic Inspections in Large-Scale Railroad Networks. J. Rail Transp. Plan. Manag. 2013, 3, 163–171. [Google Scholar] [CrossRef]
- Christian, C. Artificial Intelligence Case of the Railway Sector State of Play and Perspectives; International Union of Railways (UIC): Paris, France, 2021; ISBN 9782746130654. [Google Scholar]
- Su, Z.; Núñez, A.; Baldi, S.; De Schutter, B. Model Predictive Control for Rail Condition-Based Maintenance: A Multilevel Approach. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 354–359. [Google Scholar] [CrossRef]
- Soleimanmeigouni, I.; Ahmadi, A.; Kumar, U. Track Geometry Degradation and Maintenance Modelling: A Review. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2018, 232, 73–102. [Google Scholar] [CrossRef]
- Falamarzi, A.; Moridpour, S.; Nazem, M. A Review of Rail Track Degradation Prediction Models. Aust. J. Civ. Eng. 2019, 17, 152–166. [Google Scholar] [CrossRef]
- Xie, J.; Huang, J.; Zeng, C.; Jiang, S.H.; Podlich, N. Systematic Literature Review on Data-Driven Models for Predictive Maintenance of Railway Track: Implications in Geotechnical Engineering. Geoscience 2020, 10, 425. [Google Scholar] [CrossRef]
- Davari, N.; Veloso, B.; Costa, G.d.A.; Pereira, P.M.; Ribeiro, R.P.; Gama, J. A Survey on Data-Driven Predictive Maintenance for the Railway Industry. Sensors 2021, 21, 5739. [Google Scholar] [CrossRef]
- Xu, Y. Track Irregularity Prediction Theory and Research on Assistant Decision System. Ph.D. Thesis, Beijing Jiaotong University: Beijing, China, 2003. [Google Scholar]
- Yousefikia, M.; Moridpour, S.; Setunge, S.; Mazloumi, E. Modeling Degradation of Tracks for Maintenance Planning on a Tram Line. J. Traffic Logist. Eng. 2014, 2, 86–91. [Google Scholar] [CrossRef]
- Guler, H.; Jovanovic, S.; Evren, G. Modelling Railway Track Geometry Deterioration. Proc. Inst. Civ. Eng. Transp. 2011, 164, 65–75. [Google Scholar] [CrossRef]
- Dahlberg, T. Some Railroad Settlement Models—A Critical Review. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2001, 215, 289–300. [Google Scholar] [CrossRef]
- Sato, Y. Japanese Studies on Deterioration of Ballasted Track. Veh. Syst. Dyn. 1995, 24, 197–208. [Google Scholar] [CrossRef]
- Gao, J.; Zhai, W. Application of Vehicle-Track Coupling Dynamics to Study on Settlement of Railway Tracks. J. Southwest Jiaotong Univ. 2007, 34, 1–11. [Google Scholar]
- Shenton, M.J. Ballast Deformation and Track Deterioration. Track Technol. 1985, 21, 253–265. [Google Scholar] [CrossRef]
- Offenbacher, S.; Antony, B.; Barbir, O.; Auer, F.; Landgraf, M. Evaluating the Applicability of Multi-Sensor Equipped Tamping Machines for Ballast Condition Monitoring. Meas. J. Int. Meas. Confed. 2021, 172, 108881. [Google Scholar] [CrossRef]
- Guo, Y.; Markine, V.; Jing, G. Review of Ballast Track Tamping: Mechanism, Challenges and Solutions. Constr. Build. Mater. 2021, 300, 123940. [Google Scholar] [CrossRef]
- Wang, H.; Markine, V. Modelling of the Long-Term Behaviour of Transition Zones: Prediction of Track Settlement. Eng. Struct. 2018, 156, 294–304. [Google Scholar] [CrossRef]
- Varandas, J.N.; Hölscher, P.; Silva, M.A.G. Settlement of Ballasted Track under Traffic Loading: Application to Transition Zones. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2014, 228, 242–259. [Google Scholar] [CrossRef]
- Sadeghi, J.; Tolou Kian, A.R.; Fallah, M. Experimental Investigation of Mechanical Properties of Ballast Contaminated with Wet Sand Materials. Int. J. Geomech. 2021, 21, 04020241. [Google Scholar] [CrossRef]
- Sadeghi, J.; Tolou Kian, A.R.; Chopani, M.; Khanmoradi, A. Effects of Particle Gradations on Cyclic Behavior of Ballast Contaminated with Sand. Constr. Build. Mater. 2022, 342, 127943. [Google Scholar] [CrossRef]
- Zeng, S. Experimental Research on the Influence of Large Axle Load Operation on Track Structure of American Railway. China Railw. 1990, 3, 20–22. [Google Scholar] [CrossRef]
- Jovanović, S.; Guler, H.; Čoko, B. Track Degradation Analysis in the Scope of Railway Infrastructure Maintenance Management Systems. Gradjevinar 2015, 67, 247–258. [Google Scholar] [CrossRef]
- Trask, E.; Fraticelli, C. Computer-Based Maintenance Planning on CN Railways. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 1991, 87, 18–20, 26. [Google Scholar]
- Xu, P.; Sun, Q.; Liu, R.; Wang, F. A Short-Range Prediction Model for Track Quality Index. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2011, 225, 277–285. [Google Scholar] [CrossRef]
- Jia, C.; Xu, W.; Wang, F.; Wang, H. Track Irregularity Time Series Analysis and Trend Forecasting. Discret. Dyn. Nat. Soc. 2012, 2012, 387857. [Google Scholar] [CrossRef]
- Chang, H.; Liu, R.; Wang, W. Multistage Linear Prediction Model of Track Quality Index. In Proceedings of the Seventh International Conference on Traffic and Transportation Studies, Kunming, China, 3–5 August 2010. [Google Scholar]
- Guo, R.; Han, B. Multi-Stage Linear Prediction Model for Railway Track Irregularity. Appl. Mech. Mater. 2013, 361–363, 1811–1816. [Google Scholar] [CrossRef]
- Zhou, G. Railway Track Irregularity Data Mining and Time Series Trend Forecasting Research. Appl. Mech. Mater. 2014, 666, 272–275. [Google Scholar] [CrossRef]
- Kawaguchi, A.; Miwa, M.; Terada, K. Actual Data Analysis of Alignment Irregularity Growth and Its Prediction Model. Q. Rep. RTRI 2005, 46, 262–268. [Google Scholar] [CrossRef]
- Veit, P.; Marschnig, S. Sustainability in Track—A Precondition for High Speed Traffic. In Proceedings of the ASME 2010 Joint Rail Conference, Urbana, IL, USA, 27–29 April 2010; Volume 2, pp. 349–355. [Google Scholar] [CrossRef]
- Quiroga, L.M.; Schnieder, E. A Heuristic Approach to Railway Track Maintenance Scheduling. WIT Trans. Built Environ. 2010, 114, 687–699. [Google Scholar] [CrossRef]
- Meier-Hirmer, C.; Senée, A.; Riboulet, G.; Sourget, F.; Roussignol, M. A Decision Support System for Track Maintenance; WIT Press: Ashurst, UK, 2006; ISBN 1845641779. [Google Scholar]
- Meier-Hirmer, C.; Riboulet, G.; Sourget, F.; Roussignol, M. Maintenance Optimization for a System with a Gamma Deterioration Process and Intervention Delay: Application to Track Maintenance. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2009, 223, 189–198. [Google Scholar] [CrossRef]
- Zhu, M.; Cheng, X.; Miao, L.; Sun, X.; Wang, S. Advanced Stochastic Modeling of Railway Track Irregularities. Adv. Mech. Eng. 2013, 2013, 401637. [Google Scholar] [CrossRef]
- Lasisi, A.; Attoh-Okine, N. Machine Learning Ensembles and Rail Defects Prediction: Multilayer Stacking Methodology. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2019, 5, 04019016. [Google Scholar] [CrossRef]
- Yella, S.; Dougherty, M.S.; Gupta, N.K. Data Fusion for Automating Condition Monitoring of Wooden Railway Sleepers. Insight Non-Destr. Test. Cond. Monit. 2008, 50, 356–363. [Google Scholar] [CrossRef]
- Andrade, A.R.; Teixeira, P.F. Hierarchical Bayesian Modelling of Rail Track Geometry Degradation. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2013, 227, 364–375. [Google Scholar] [CrossRef]
- Fumeo, E.; Oneto, L.; Anguita, D. Condition Based Maintenance in Railway Transportation Systems Based on Big Data Streaming Analysis. Procedia Comput. Sci. 2015, 53, 437–446. [Google Scholar] [CrossRef]
- Gibert, X.; Patel, V.; Chellappa, R. Deep Multi-Task Learning for Railway Track Inspection. IEEE Trans. Intell. Transp. Syst. 2015, 18, 153–164. [Google Scholar] [CrossRef]
- Bai, L.; Liu, R.; Sun, Q.; Wang, F.; Wang, F. Classification-Learning-Based Framework for Predicting Railway Track Irregularities. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2016, 230, 598–610. [Google Scholar] [CrossRef]
- Jamshidi, A.; Faghih-Roohi, S.; Hajizadeh, S.; Núñez, A.; Babuska, R.; Dollevoet, R.; Li, Z.; De Schutter, B. A Big Data Analysis Approach for Rail Failure Risk Assessment. Risk Anal. 2017, 37, 1495–1507. [Google Scholar] [CrossRef]
- Heidarysafa, M.; Kowsari, K.; Barnes, L.; Brown, D. Analysis of Railway Accidents’ Narratives Using Deep Learning. In Proceedings of the 2018 17th IEEE International Conference on Machine Learning and Applications (ICMLA), Orlando, FL, USA, 17–20 December 2018; pp. 1446–1453. [Google Scholar] [CrossRef]
- Lasisi, A.; Attoh-Okine, N. Principal Components Analysis and Track Quality Index: A Machine Learning Approach. Transp. Res. Part C Emerg. Technol. 2018, 91, 230–248. [Google Scholar] [CrossRef]
- Ghofrani, F.; He, Q.; Goverde, R.M.P.; Liu, X. Recent Applications of Big Data Analytics in Railway Transportation Systems: A Survey. Transp. Res. Part C Emerg. Technol. 2018, 90, 226–246. [Google Scholar] [CrossRef]
- Sharma, S.; Cui, Y.; He, Q.; Mohammadi, R.; Li, Z. Data-Driven Optimization of Railway Maintenance for Track Geometry. Transp. Res. Part C Emerg. Technol. 2018, 90, 34–58. [Google Scholar] [CrossRef]
- Zhang, Y.; Kim, C.W.; Tee, K.F. Maintenance Management of Offshore Structures Using Markov Process Model with Random Transition Probabilities. Struct. Infrastruct. Eng. 2017, 13, 1068–1080. [Google Scholar] [CrossRef]
- Urban, S.; Wagner, R.; Strauss, A.; Reiterer, M.; Dehlinger, C.; Bergmeister, K. Monitoring-Based Lifetime Assessment of Concrete Structures—Research Project MOSES. Beton-Und Stahlbetonbau 2013, 108, 630–640. [Google Scholar] [CrossRef]
- Corotis, R.; Ellis, J.; Jiang, M. Modeling of Risk-Based Inspection, Maintenance and Life-Cycle Cost with Partially Observable Markov Decision Processes. Struct. Infrastruct. Eng. 2005, 1, 75–84. [Google Scholar] [CrossRef]
- Saydam, D.; Frangopol, D. Risk-Based Maintenance Optimization of Deteriorating Bridges. J. Struct. Eng. 2014, 141, 4014120. [Google Scholar] [CrossRef]
- Prescott, D.; Andrews, J. Modelling Maintenance in Railway Infrastructure Management. In Proceedings of the 2013 Proceedings Annual Reliability and Maintainability Symposium (RAMS), Orlando, FL, USA, 28–31 January 2013; ISBN 978-1-4673-4709-9. [Google Scholar]
- Shafahi, Y.; Hakhamaneshi, R. Application of a Maintenance Management Model for Iranian Railways Based on the Markov Chain and Probabilistic Dynamic Programming. Sci. Iran. 2009, 16, 87–97. [Google Scholar]
- Shafahi, Y.; Masoudi, P.; Hakhamaneshi, R. Track Degradation Prediction Models, Using Markov Chain, Artificial Neural and Neuro-Fuzzy Network. In Proceedings of the 8th World Congress on Railway Research, Seoul, Korea, 18–22 May 2008. [Google Scholar]
- Lyngby, N.; Hokstad, P.; Vatn, J. RAMS Management of Railway Tracks. Handb. Perform. Eng. 2008, 68, 1123–1145. [Google Scholar] [CrossRef]
- Bai, L.; Liu, R.; Sun, Q.; Wang, F.; Xu, P. Markov-Based Model for the Prediction of Railway Track Irregularities. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2015, 229, 150–159. [Google Scholar] [CrossRef]
- Andrade, A.R.; Teixeira, P.F. A Bayesian Model to Assess Rail Track Geometry Degradation through Its Life-Cycle. Res. Transp. Econ. 2012, 36, 1–8. [Google Scholar] [CrossRef]
- Tanaka, H.; YAMAMOTO, S.; OSHIMA, T.; Miwa, M. Methods for Detecting and Predicting Localized Rapid Deterioration of Track Irregularity Based on Data Measured with High Frequency. Q. Rep. RTRI 2018, 59, 169–175. [Google Scholar] [CrossRef]
- Andrade, A.; Teixeira, P. Statistical Modelling of Railway Track Geometry Degradation Using Hierarchical Bayesian Models. Reliab. Eng. Syst. Saf. 2015, 142, 169–183. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y. Research on the Modeling of Railway Track Geometric Degradation Law Based on Hierarchical Bayesian Model. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2019. [Google Scholar]
- Jamshidi, A.; Faghih Roohi, S.; Núñez, A.; Babuska, R.; De Schutter, B.; Dollevoet, R.; Li, Z. Probabilistic Defect-Based Risk Assessment Approach for Rail Failures in Railway Infrastructure. IFAC-PapersOnLine 2016, 49, 73–77. [Google Scholar] [CrossRef]
- Movaghar, M.; Mohammadzadeh, S. Bayesian Monte Carlo Approach for Developing Stochastic Railway Track Degradation Model Using Expert-Based Priors. Struct. Infrastruct. Eng. 2020, 18, 145–166. [Google Scholar] [CrossRef]
- Quiroga, L.; Schnieder, E. Monte Carlo Simulation of Railway Track Geometry Deterioration and Restoration. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2012, 226, 274–282. [Google Scholar] [CrossRef]
- Mishra, M.; Odelius, J.; Thaduri, A.; Nissen, A.; Rantatalo, M. Particle Filter-Based Prognostic Approach for Railway Track Geometry. Mech. Syst. Signal Process. 2017, 96, 226–238. [Google Scholar] [CrossRef]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A Simple Way to Prevent Neural Networks from Overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Ma, S.; Gao, L.; Liu, X.; Lin, J. Deep Learning for Track Quality Evaluation of High-Speed Railway Based on Vehicle-Body Vibration Prediction. IEEE Access 2019, 7, 185099–185107. [Google Scholar] [CrossRef]
- Yang, C.; Sun, Y.; Ladubec, C.; Liu, Y. Developing Machine Learning-Based Models for Railway Inspection. Appl. Sci. 2020, 11, 13. [Google Scholar] [CrossRef]
- Faghih-Roohi, S.; Hajizadeh, S.; Nunez, A.; Babuska, R.; De Schutter, B. Deep Convolutional Neural Networks for Detection of Rail Surface Defects. In Proceedings of the 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 2584–2589. [Google Scholar] [CrossRef]
- Zhang, J.; Man, K.F. Time Series Prediction Using RNN in Multi-Dimension Embedding Phase Space. In Proceedings of the SMC’98 Conference Proceedings. 1998 IEEE International Conference on Systems, Man, and Cybernetics (Cat. No.98CH36218), San Diego, CA, USA, 14 October 1998; Volume 2, pp. 1868–1873. [Google Scholar]
- Jahan, K.; Niemeijer, J.; Kornfeld, N.; Roth, M. Deep Neural Networks for Railway Switch Detection and Classification Using Onboard Camera Images. In Proceedings of the 2021 IEEE Symposium Series on Computational Intelligence (SSCI), Orlando, FL, USA, 5–7 December 2021; pp. 1–7. [Google Scholar]
- Sresakoolchai, J.; Kaewunruen, S. Railway Defect Detection Based on Track Geometry Using Supervised and Unsupervised Machine Learning. Struct. Health Monit. 2022, 21, 1757–1767. [Google Scholar] [CrossRef]
- Sresakoolchai, J.; Kaewunruen, S. Detection and Severity Evaluation of Combined Rail Defects Using Deep Learning. Vibration 2021, 4, 341–356. [Google Scholar] [CrossRef]
- Sadeghi, J.; Askarinejad, H. Application of Neural Networks in Evaluation of Railway Track Quality Condition. J. Mech. Sci. Technol. 2012, 26, 113–122. [Google Scholar] [CrossRef]
- Peng, L.; Zhang, J.; Gou, J.; Xuewei, L.I. Prediction Method of Railway Track Geometric Irregularity Based on BP Neural Network. Tiedao Xuebao/J. China Railw. Soc. 2018, 40, 154–158. [Google Scholar] [CrossRef]
- Falamarzi, A.; Moridpour, S.; Nazem, M.; Hesami, R. Rail Degradation Prediction Models for Tram System: Melbourne Case Study. J. Adv. Transp. 2018, 2018, 6340504. [Google Scholar] [CrossRef]
- Guler, H. Prediction of Railway Track Geometry Deterioration Using Artificial Neural Networks: A Case Study for Turkish State Railways. Struct. Infrastruct. Eng. 2014, 10, 614–626. [Google Scholar] [CrossRef]
- Lee, J.; Hwang, S.H.; Choi, I.; Kim, I. Prediction of Track Deterioration Using Maintenance Data and Machine Learning Schemes. J. Transp. Eng. Part A Syst. 2018, 144, 04018045. [Google Scholar] [CrossRef]
- Khajehei, H.; Ahmadi, A.; Soleimanmeigouni, I.; Haddadzade, M.; Nissen, A.; Latifi Jebelli, M.J. Prediction of Track Geometry Degradation Using Artificial Neural Network: A Case Study. Int. J. Rail Transp. 2022, 10, 24–43. [Google Scholar] [CrossRef]
- Franklin, J. The Elements of Statistical Learning: Data Mining, Inference and Prediction. Math. Intell. 2005, 27, 83–85. [Google Scholar] [CrossRef]
- Guyon, I.; Weston, J.; Barnhill, S.; Vapnik, V. Gene Selection for Cancer Classification Using Support Vector Machines. Mach. Learn. 2002, 46, 389–422. [Google Scholar] [CrossRef]
- Hu, C.; Liu, X. Modeling Track Geometry Degradation Using Support Vector Machine Technique. In Proceedings of the Proceedings of the 2016 Joint Rail Conference (JRC), Columbia, SC, USA, 12–15 April 2016; pp. 12–152016. [Google Scholar] [CrossRef]
- Falamarzi, A.; Moridpour, S.; Nazem, M.; Cheraghi, S. Prediction of Tram Track Gauge Deviation Using Artificial Neural Network and Support Vector Regression. Aust. J. Civ. Eng. 2019, 17, 63–71. [Google Scholar] [CrossRef]
- Bergmeir, C.; Sáinz, G.; Martínez Bertrand, C.; Benítez, J.M. A Study on the Use of Machine Learning Methods for Incidence Prediction in High-Speed Train Tracks. In Recent Trends in Applied Artificial Intelligence; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2013; Volume 7906, pp. 674–683. [Google Scholar] [CrossRef]
- Cárdenas-Gallo, I.; Sarmiento, C.A.; Morales, G.A.; Bolivar, M.A.; Akhavan-Tabatabaei, R. An Ensemble Classifier to Predict Track Geometry Degradation. Reliab. Eng. Syst. Saf. 2017, 161, 53–60. [Google Scholar] [CrossRef]
- Lee, J.; Hwang, S.H.; Choi, I.; Choi, Y. Deterioration Prediction of Track Geometry Using Periodic Measurement Data and Incremental Support Vector Regression Model. J. Transp. Eng. Part A Syst. 2020, 146, 4019057. [Google Scholar] [CrossRef]
- Lin, H.Q.; Chai, X.D.; Sheng-Chao, S.U.; Zheng, S.B. Track Irregularity State Recognition Based on PCA and SVM. Meas. Control Technol. 2016, 35, 25–29. [Google Scholar]
- Xu, Y.; Liu, Y.; Shen, J. SVM-MC Method for Solving Stochastic Model of Track Irregularity Prediction. J. E. China Jiaotong Univ. 2018, 35, 1–7. [Google Scholar] [CrossRef]
- Deng, J.L. Control Problems of Grey Systems. Syst. Control Lett. 1982, 1, 288–294. [Google Scholar]
- Deng, J.L. Introduction to Grey System Theory. J. Grey Syst. 1989, 1, 1–24. [Google Scholar]
- Kayacan, E.; Ulutas, B.; Kaynak, O. Grey System Theory-Based Models in Time Series Prediction. Expert Syst. Appl. 2010, 37, 1784–1789. [Google Scholar] [CrossRef]
- Jianjun, Q.U.; Liang, G.; Xinkui, Z.; Tao, X. A Prediction Method for Track Quality Based on Grey GM(1,1)Non-Equal Time Interval Correction Model. China Railw. Sci. 2009, 30, 5–8. [Google Scholar]
- Jian-Jun, Q.U.; Gao, L.; Tian, X.Y.; Xin, T. Study on the Mid & Long Term Prediction Model of Track Geometry State Based on the Grey Time-Varying Parameters Theory. J. China Railw. Soc. 2010, 32, 55–59. [Google Scholar]
- Jia, C. Research on Railway Track Irregularity Data Mining and Time Series Trend Prediction. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2013. [Google Scholar]
- Xu, B. Research on the Prediction Method of Track Irregularity. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2012. [Google Scholar]
- Guo, R.; Han, B.; Dewei, L.I.; Hua, L.I. Grey Prediction Model for Track Irregularity with Update Mechanism. J. Cent. South Univ. Technol. 2013, 44, 4334–4341. [Google Scholar]
- Wang, N.; Wang, F. Prediction for Track Irregularity Based on Gray Interval Prediction Model. Railw. Comput. Appl. 2015, 24, 1–7. [Google Scholar]
- Bao, W.Y.; Wang, F.T.; Shi-Yi, L.I.; Zhang, N. Research on the Prediction of Track Vertical Profile Irregularity of Heavy Haul Railway. Railw. Stand. Des. 2019, 63, 29–33. [Google Scholar] [CrossRef]
- Qu, J. Study on the Track Irregularity Prediction and Decision-Aided Technology Based on TQI of Raising Speed Lines. Ph.D. Thesis, Beijing Jiaotong University, Beijing, China, 2010. [Google Scholar]
- Jianjun, Q.U.; Gao, L.; Xin, T.; Zheng, X. Track Irregularity Development Prediction Method Based on Grey-Markov Chain Model. J. Beijing Jiaotong Univ. 2010, 34, 107–111. [Google Scholar]
- Liu, F.; Wei, X.; Liu, Y.; Yin, X. Track Quality Prediction Based on Center Approach Markov-Grey GM(1,1) Model. In Proceedings of the 2014 IEEE International Conference on Information and Automation (ICIA), Hailar, China, 28–30 July 2014; pp. 81–86. [Google Scholar] [CrossRef]
- Wang, F.X.; Guo, T.Y. Unequal Interval Grey Forecast Model Based upon Center Approach. J. Shaanxi Univ. Technol. Sci. Ed. 2007, 23, 78–81. [Google Scholar]
- Pan, H.; Huang, Y.; Wang, L.; Liu, R.; Xu, Y. Research on the Prediction and Application of Track Geometric Irregularity Based on GM(1,1) and Grey-Markov Model. Railw. Stand. Des. 2010, 10, 5–9. [Google Scholar] [CrossRef]
- Han, J.; Yang, Y.; Chen, F.; Wu, X.H. Prediction of Track Irregularity Based on Non-Equal Interval Weighted Grey Model and Neural Network. J. China Railw. Soc. 2014, 36, 81–87. [Google Scholar]
- Tang, T. Prediction and Research of Rail Quality Index Based on Track Online Detection. Master’s Thesis, Hunan University, Changsha, China, 2018. [Google Scholar]
- Liu, H.; Tian, H.; Liang, X.; Li, Y. New Wind Speed Forecasting Approaches Using Fast Ensemble Empirical Model Decomposition, Genetic Algorithm, Mind Evolutionary Algorithm and Artificial Neural Networks. Renew. Energy 2015, 83, 1066–1075. [Google Scholar] [CrossRef]
- Ma, Z.; Tang, T.; Liu, H.; Peng, Q.; Jin, T. Forecasting of Track Quality Based on Unequal-Interval Grey Model and Elman Neural Network. Harbin Gongye Daxue Xuebao/J. Harbin Inst. Technol. 2018, 50, 137–144. [Google Scholar]
- Yao, Y. Research and Implementation of Track Irregularity Prediction System for Rail Detection. Master’s Thesis, Beijing University of Posts and Telecommunications, Beijing, China, 2019. [Google Scholar]
- Ma, Z.; Guo, S.; Li, Y. Forecasting of Track Irregularity Based on Improved Non-Equal Interval Grey Model and PSVM. Tiedao Xuebao/J. China Railw. Soc. 2018, 40, 154–160. [Google Scholar]
- Fei, S.; Wang, M.-J.; Miao, Y.; Tu, J.; Liu, C. Particle Swarm Optimization-Based Support Vector Machine for Forecasting Gases Content in Power Transformer Oil. Energy Convers. Manag. 2009, 50, 1604–1609. [Google Scholar] [CrossRef]
- Feng, C.; Chao-Gang, Y.U.; Sun, L.; Qin, X. Prediction of Track Irregularity Based on Improved GM(1,1)and WOA-LSSVM Combination Model. Railw. Stand. Des. 2019, 7, 34–39+46. [Google Scholar] [CrossRef]
- Suykens, J.; Vandewalle, J. Least Squares Support Vector Machine Classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Li, M. Research on Track Irregularity Prediction Based on Combined Prediction Model. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2013. [Google Scholar]
- Zhu, Y.S.; Wang, W.H.; Han, B.T. Grey Correlative Degree Analysis of Factors Affecting Demands in the Real Estate Market. J. Beijing Inst. Technol. 2002, 6, 782–785. [Google Scholar]
- Xin, T.; Famurewa, S.M.; Gao, L.; Kumar, U.; Zhang, Q. Grey-System-Theory-Based Model for the Prediction of Track Geometry Quality. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2016, 230, 1735–1744. [Google Scholar] [CrossRef]
- Li, W.; Daniels, M. A Fourier Series Method for the Vibrations of Elastically Restrained Plates Arbitrarily Loaded with Springs and Masses. J. Sound Vib. 2002, 252, 768–781. [Google Scholar] [CrossRef]
- Ahmad, J.; Farman, H.; Jan, Z. Deep Learning Methods and Applications. In Deep Learning: Convergence to Big Data Analytics; Springer: Singapore, 2019; pp. 31–42. ISBN 978-981-13-3458-0. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
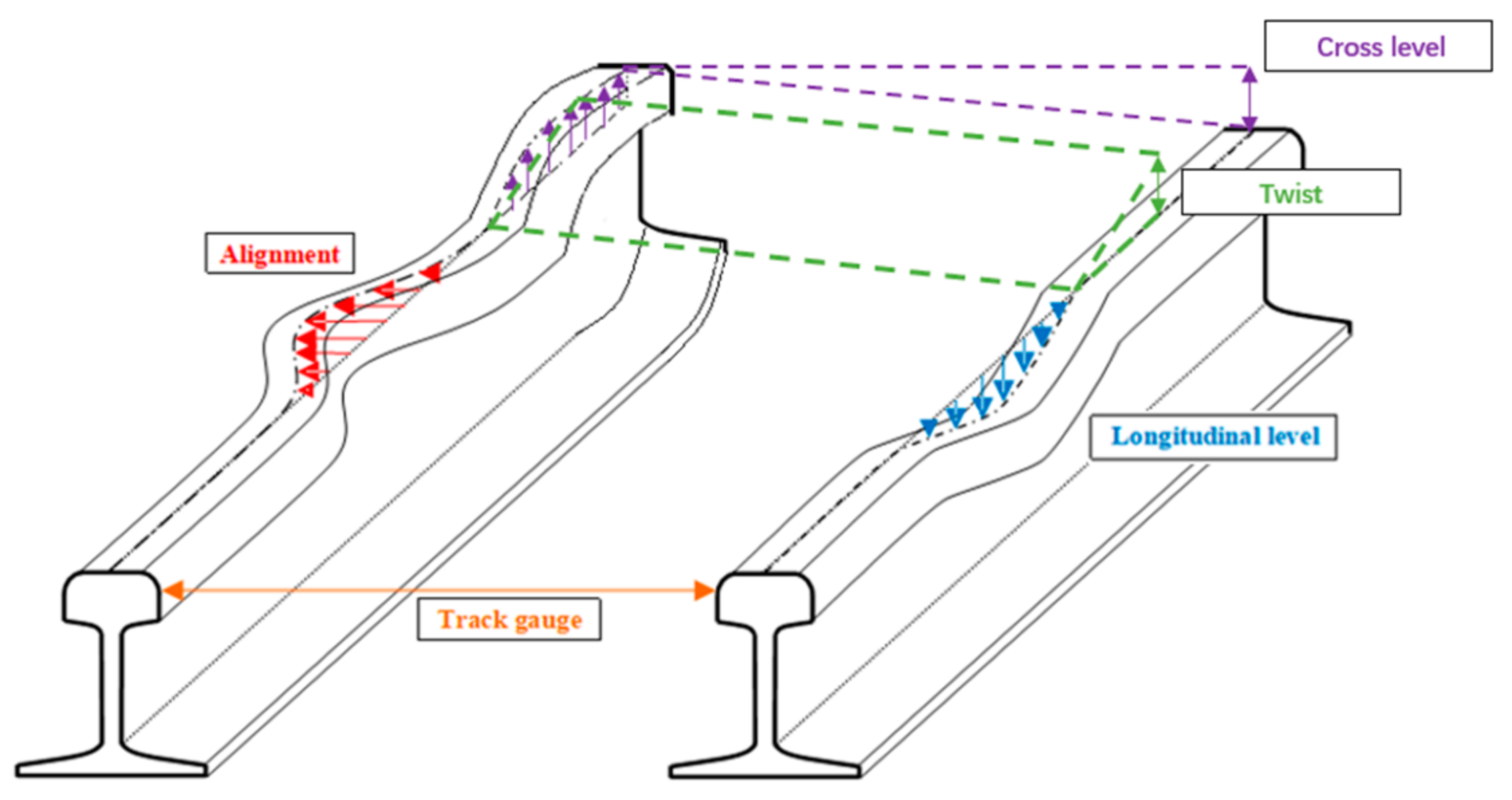
| Track Geometry | Definition |
|---|---|
| Gauge | The distance between the inner sides of the left and right rail heads is perpendicular to the track centre. |
| Twist | The measurement of elevation difference between the top surfaces of two rails [5]. |
| Longitudinal level | The geometrical error in the vertical plane is represented by the difference (in millimetres) between a point on the top of the rail in the running plane and the ideal mean line of the longitudinal profile [6]. |
| Alignment | The deviations in the lateral positions of the left and right rails from a mean trajectory were obtained by filtering out wavelengths longer than a given length [7,8]. |
| Cross level | The deviation between the top surfaces of two rails at a given location [9]. |
| Reference | Application | Objective | Machine Learning Technique |
|---|---|---|---|
| [53] | Sleeper inspection | Predict rail machine vision for maintenance | Classifier fusion combined models |
| [54] | Rail track geometry modelling | Predict rail track geometry degradation for maintenance | Hierarchical Bayesian models, Markov Chain-Monte Carlo (MCMC) |
| [55] | Condition-based maintenance in railway transportation systems | Use sensor data collection to maximise remaining useful life (RUL) | Big data streaming analysis, online support vector regression models |
| [56] | Material classification and semantic segmentation of railway track images | Extraction of accurate information from visual track inspection images | Deep convolutional neural networks |
| [57] | Prediction of railway track irregularities | Identify possible underlying patterns or rules for predicting | Classification learning, tree-augmented naive Bayes |
| [58] | Risk assessment of rail failure | Use big data techniques to process image data for automatic squat detection | Deep convolution neural network |
| [59] | Rail accident data reporting | Text analysis of railway accident reports | Deep learning, recurrent neural networks (RNN), long short-term memory networks (LSTM) |
| [60] | Data-driven artificial track quality indices | Use the principal component analysis for feature selection and combined track quality index (TQI) | Dimension reduction random forest, support vector machines |
| [61] | Recent applications of big data techniques in railway | Literature review | Descriptive statistics, charts, etc. |
| [62] | Data-driven optimisation of railway maintenance for track geometry | Track degradation modelling | Random forests, Markov methods including MCMC, Markov decision processes (MDP) |
| Model | |
|---|---|
| ORE | 0.12 |
| Markov chain | 0.83 |
| ANN | 0.72 |
| FNN | 0.81 |
| Prediction Object | Input Variable (Standard Deviation) | Neurons |
|---|---|---|
| Rail defect | Gauge, longitudinal level, alignment, twist | 15 |
| Sleeper defect | Gauge, longitudinal level, alignment, twist | 10 |
| Ballast defect | Longitudinal level, alignment, twist | 25 |
| fastener defect | Gauge, longitudinal level, twist | 15 |
| Input Variables | Relative Importance (%) | Rank |
|---|---|---|
| Maintenance record | 16.1 | 1 |
| Track degradation rate after Tamping | 11.79 | 2 |
| Train load | 9.51 | 3 |
| Train speed | 7.97 | 4 |
| Ballast age | 7.81 | 5 |
| Sleeper age | 7.78 | 6 |
| Sleeper type | 7.45 | 7 |
| Cross level | 7.29 | 8 |
| Rail type | 6.69 | 9 |
| Bridge | 6.58 | 10 |
| Track layout | 6.32 | 11 |
| Reference | Input Variables | Output Variables |
|---|---|---|
| [88] | Standard deviation of gauge, longitudinal level, alignment, and twist | Defect density of rail, sleeper, ballast, and fastener |
| [89] | Standard deviation of gauge, longitudinal level, alignment, cross level, and twist | Standard deviation of gauge, longitudinal level, alignment, cross level, and twist |
| [90] | Gauge, train load, track layout, ballast type, rail type, and rail support | Gauge |
| [69] | CTR index, train load, track layout, train speed, geographic location, and gradient of track section | CTR index |
| [91] | Cross level, train load, track layout, train speed, rail type, sleeper type, the gradient of the track section, and environmental factors | Track degradation rate |
| [92] | TQI, train load, track layout, train speed, subgrade type, and maintenance parameters | TQI |
| [93] | Cross level, train load, track layout, train speed, rail type, sleeper type, sleeper age, ballast age, bridge, and maintenance parameters | Track degradation rate |
| Model | Sections Type | R2 | MSE |
|---|---|---|---|
| SVM | Straight sections | 0.90 | 1.48 |
| Curved sections | 0.83 | 2.43 | |
| ANN | Straight sections | 0.95 | 0.80 |
| Curved sections | 0.78 | 3.8 |
| Defect | Single Classifier | Ensemble Classifier |
|---|---|---|
| SVM | Support Vector Machine Stacking (SSV) | |
| Cross level | 74.55% | 73.99% |
| Longitudinal level | 78.73% | 79.50% |
| Twist | 76.28% | 82.56% |
| Reference | Input Variables | Output Variables |
|---|---|---|
| [96] | Train load, train speed, track layout, track class, time intervals, and length and amplitude of defect | Track geometry defects |
| [97] | Gauge and rail type | Gauge |
| [98] | Acceleration of the bogie, axle box, and car body | Incidence in railway tracks |
| [99] | Train load, track class, time intervals, and length and amplitude of defect | Track geometry defects |
| [100] | TQI, train load, track layout, train speed, subgrade type, and maintenance parameters | TQI |
| [101] | Time-domain and frequency domain of axle box acceleration | Track geometry defects |
| [102] | Mean and variance of the parameters of a track degradation model | Mean and variance of the parameters of a track degradation model |
| References | Model | Application | Advantage | Limitation |
|---|---|---|---|---|
| [113] | TITCGM (1,1)-PC | Short-term prediction for the TQI | Respectively consider the deteriorating component and random component in the TQI | Poor prediction accuracy |
| [114,115,117] | Grey-Markov | Long-term prediction of the TQI | Predict the TQI with strong randomness | Need to build complex transition matrixes |
| [118] | GM-BP | Short-term prediction for the TQI | Improve the prediction accuracy of the GM (1, 1) | Lack of prediction stability |
| [119] | GM-MEA-BP | Short-term prediction for the TQI | Improve the convergence speed of the BP Neural Network | The time-series properties of the TQI are not considered |
| [121] | GM-GA-Elman | Short-term prediction for the TQI | Avoid the BP Neural Network instability caused by random assignment | Need to study the applicability of the model in the medium and long term |
| [122] | GM-RNN | Short-term prediction for the TQI | Consider the time-series properties of the TQI | Lack of prediction stability |
| [123] | GM-PSVM | Short-term prediction for the TQI | Solve the problem of BP Neural Network, which easily falls into local optimum | Need to study the applicability of the model in the medium and long term |
| [125] | GM-WOA-LSSVM | Short-term prediction for the TQI | Need few optimisation parameters and improve the learning speed | Need to study the applicability of the model in the medium and long term |
| [42] | GM-AR | Long-term and short-term prediction for the TQI | Realise long-term and short-term prediction for the TQI | Need to consider more random factors |
| [128] | ESGM-RGCD | Short-term prediction for the TQI | Obtain the optimal solution of the weight coefficient of the combined model | Need to study the applicability of the model in the medium and long term |
| [130] | FGM | Short-term prediction for the TQI | Improve the prediction accuracy of the GM (1, 1) | Need to study the applicability of the model in the medium and long term |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, Y.; Han, L.; Wang, H.; Zhang, H. Prediction Models for Railway Track Geometry Degradation Using Machine Learning Methods: A Review. Sensors 2022, 22, 7275. https://doi.org/10.3390/s22197275
Liao Y, Han L, Wang H, Zhang H. Prediction Models for Railway Track Geometry Degradation Using Machine Learning Methods: A Review. Sensors. 2022; 22(19):7275. https://doi.org/10.3390/s22197275
Chicago/Turabian StyleLiao, Yingying, Lei Han, Haoyu Wang, and Hougui Zhang. 2022. "Prediction Models for Railway Track Geometry Degradation Using Machine Learning Methods: A Review" Sensors 22, no. 19: 7275. https://doi.org/10.3390/s22197275
APA StyleLiao, Y., Han, L., Wang, H., & Zhang, H. (2022). Prediction Models for Railway Track Geometry Degradation Using Machine Learning Methods: A Review. Sensors, 22(19), 7275. https://doi.org/10.3390/s22197275