

Enhancing Graph Routing Algorithm of Industrial Wireless Sensor Networks Using the Covariance-Matrix Adaptation Evolution Strategy


Abstract
:1. Introduction
2. Background and Literature Review
2.1. Graph Routing Algorithms
2.2. Optimisation Techniques Applied to Routing
2.3. CMA-ES
3. Description the Model of Best Paths for Graph Routing Based on CMA-ES Selection
3.1. Overview
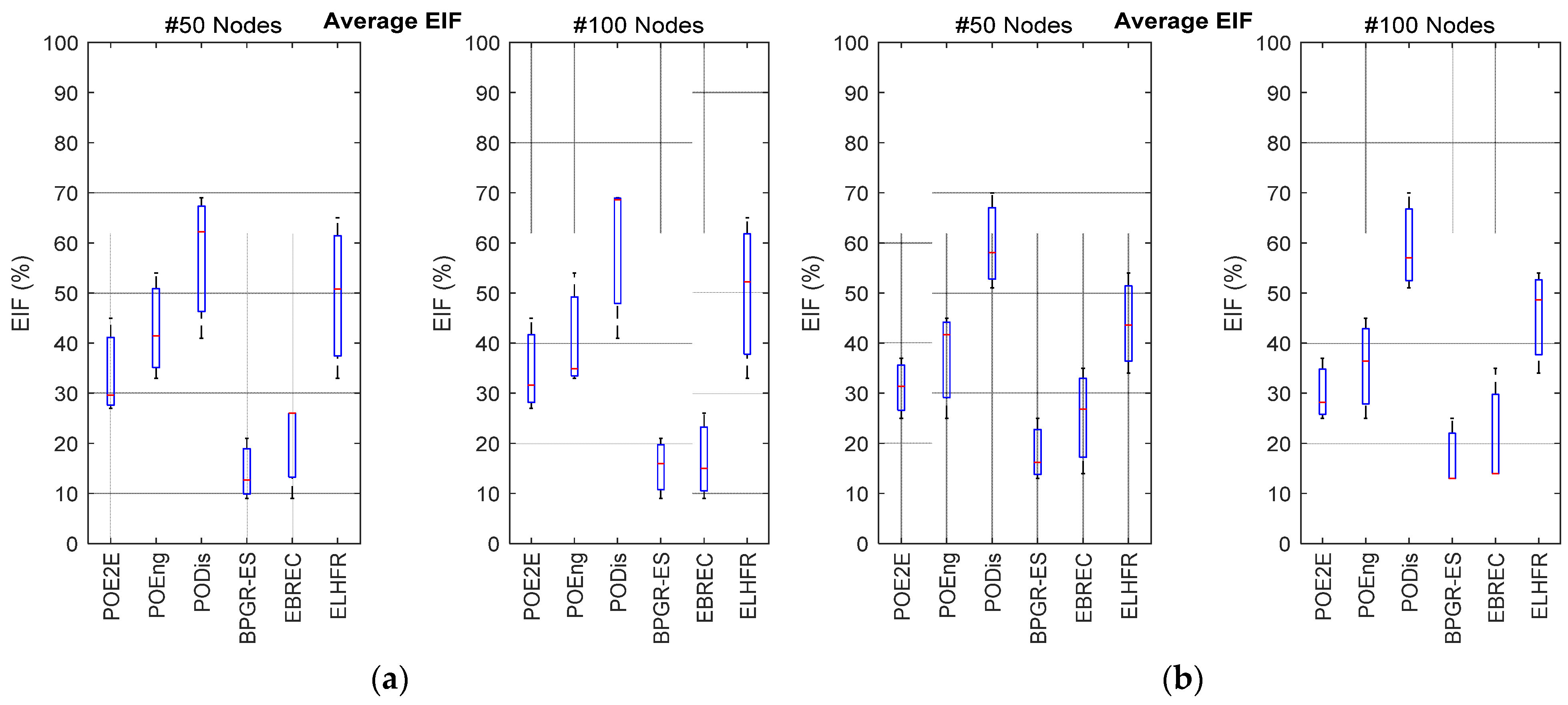
- The average EIF is defined as the standard variance of the residual energy of all nodes in the network. It is used to demonstrate how effective a GR algorithm is in terms of achieving an energy balance. The EIF is calculated aswhere is the number of nodes, is node ’s residual energy, and REavg is the average residual energy of all nodes.
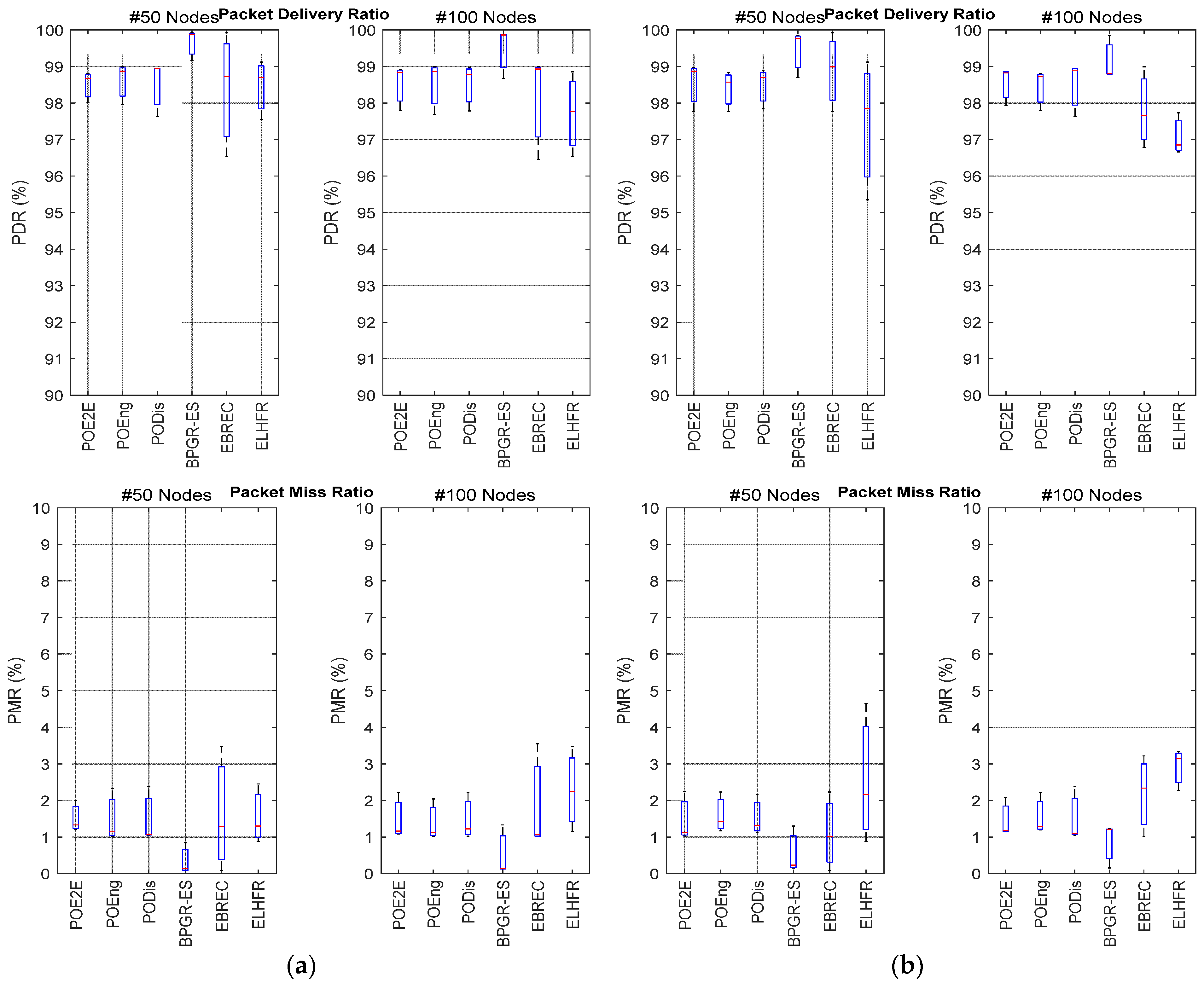
- Reliability is evaluated using PDR, which is the ratio of data packets that successfully reach the Gw to the total number of data packets sent by the source nodes.
- In addition, the PMR is defined as the ratio of data packets that failed to make it to the Gw
- The latency of each data packet is evaluated using E2ET, which is the time required for a data packet to travel from the source node to the
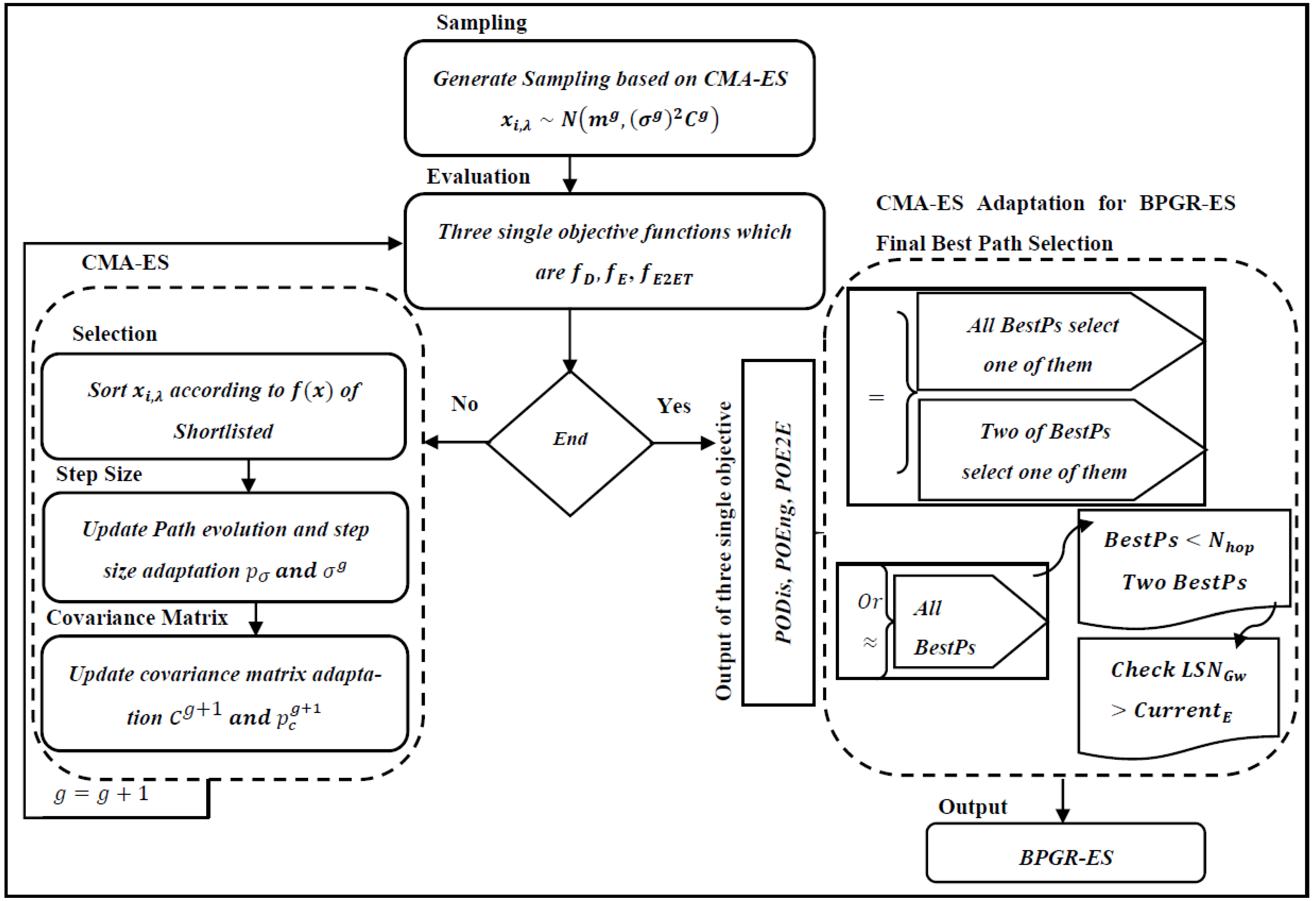
3.2. Covariance Matrix Adaptation Evolution Strategy (CMA-ES) for Graph Routing in IWSN
3.2.1. Objective Functions of the Best Path
- Minimum communication distance between the source node and receiver node toward , : This is defined as the minimum distance between the currently sending node and its neighbours in the direction and achieved by minimising , the currently sending node, with the lowest communication cost. Thus,where is the Euclidean distance between the currently sending node and its neighbour node toward the in Shortlist and is used in this model rather than the neighbouring table to build all the best paths.
| Algorithm 1: Objective Functions of Select the Best Paths of Graph Routing algorithms based on of CMA-ES. |
|
| Algorithm 2: Build Shortlist of Sensor Nodes. |
|
- 2.
- Maximum Residual Energy: This is defined as the residual energy in the sensor nodes after they perform sensing, communication operations and computation. Sensor nodes with higher residual energy tend to be selected as the next hop in the best path, as maximising , each sensor node periodically uploads its residual energy to NM. Thus,where is the residual energy of sensor node . To ensure the quality of communication and increase reliability in the IWSNs, each currently sending node looks in Shortlist to locate the sensor node with maximum energy in the required path rather than examining the neighbouring table.
- 3.
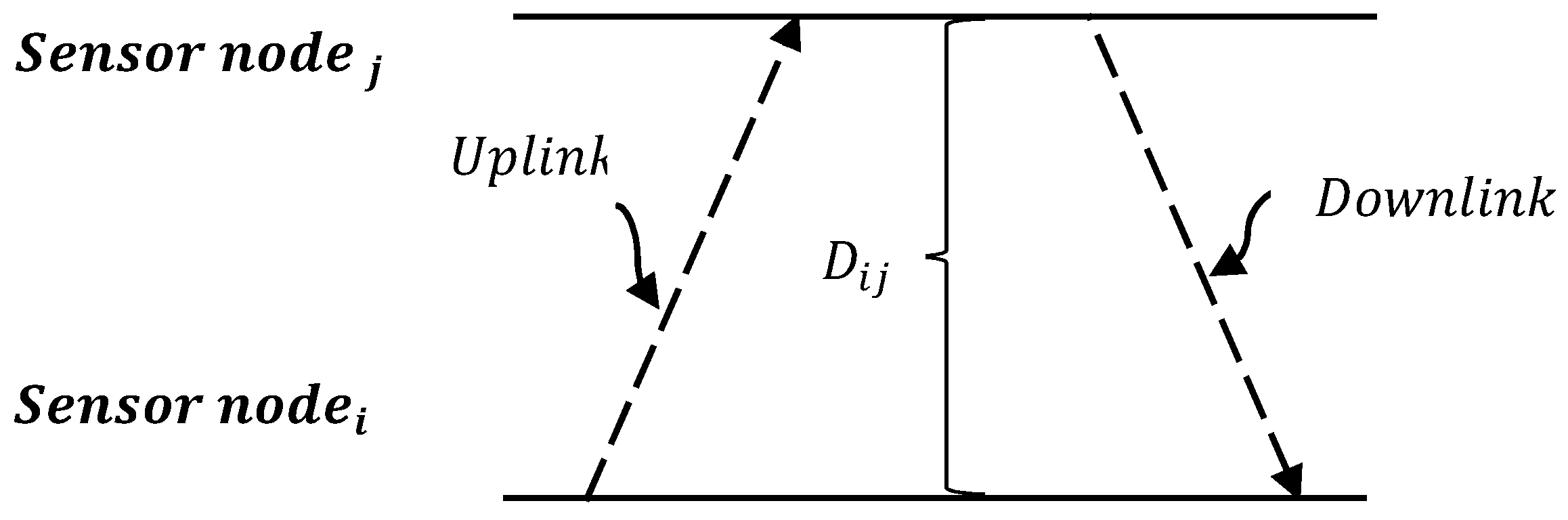
- End-to-End transmission time between the source node and receiver node toward the : The End-to-End transmission time measure proposed in this research refers to the time required for a given pair of nodes in the WirelessHART network to exchange a data packet. WirelessHART is a TDMA-based network protocol. Each communication is time-synchronised and this provides a timescale for nodes in the network. A fixed-length timeslot shared by all network devices is the basic time unit of communication activity. Seeing that all hardware clocks are imperfect, those at different nodes may drift away from each other. For this reason, the observed time or time interval durations may differ for each node in the network. The timeslot hence provides a time base for scheduling the transmission of process data. In WirelessHART, a timeslot has a duration of 10 ms, which is sufficient to send or receive one packet per channel and its accompanying acknowledgement, including the guard-band times required for network-wide synchronisation.
| Algorithm 3: Selection Best Path of Graph Routing (BPGR-ES). |
|
3.2.2. CMA-ES Adaptation for BPGR-ES Final Best Path Selection
4. Simulation Experiments
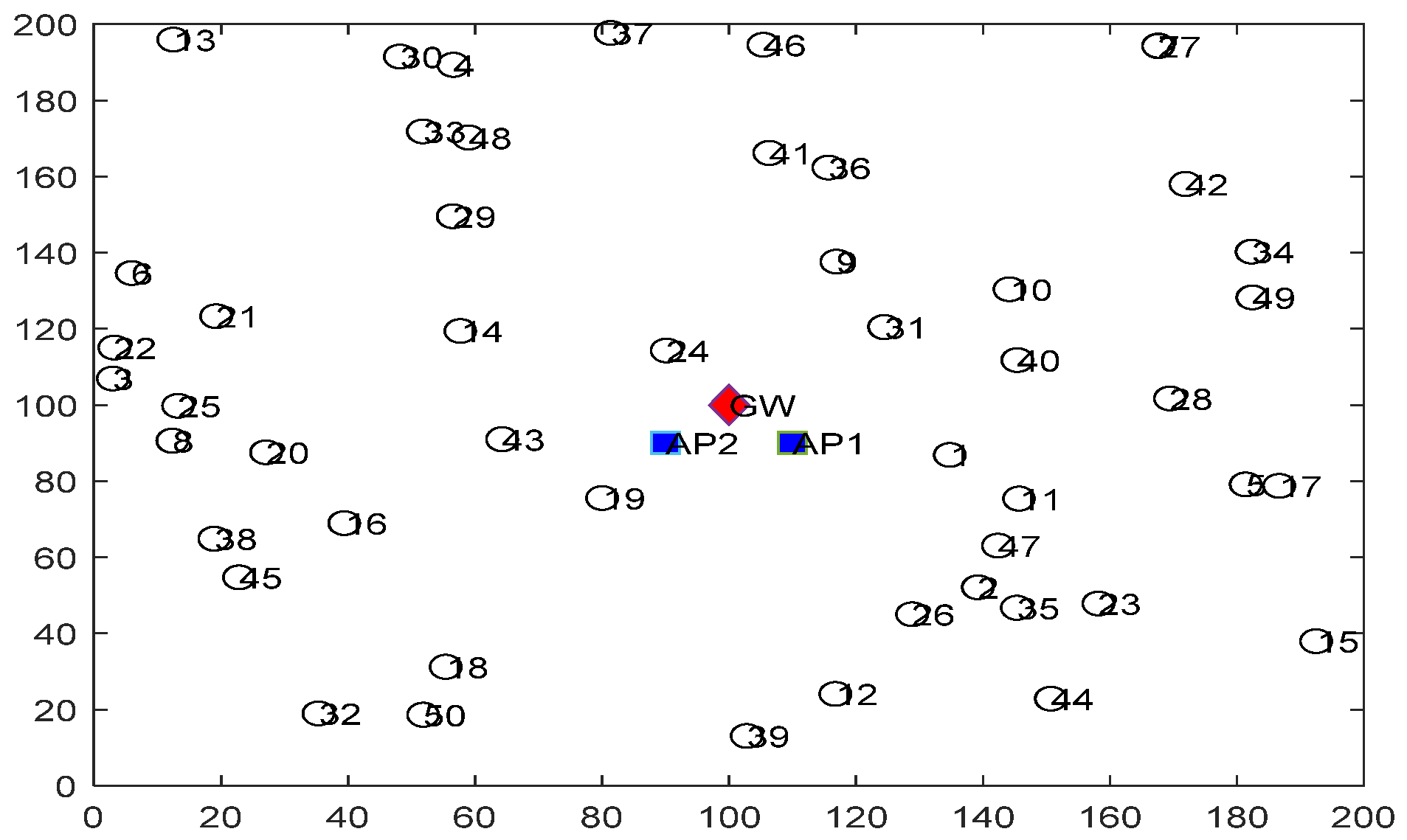
4.1. Simulation Setup
4.2. Evaluation Results and Analysis
4.2.1. Network Reliability Evaluation
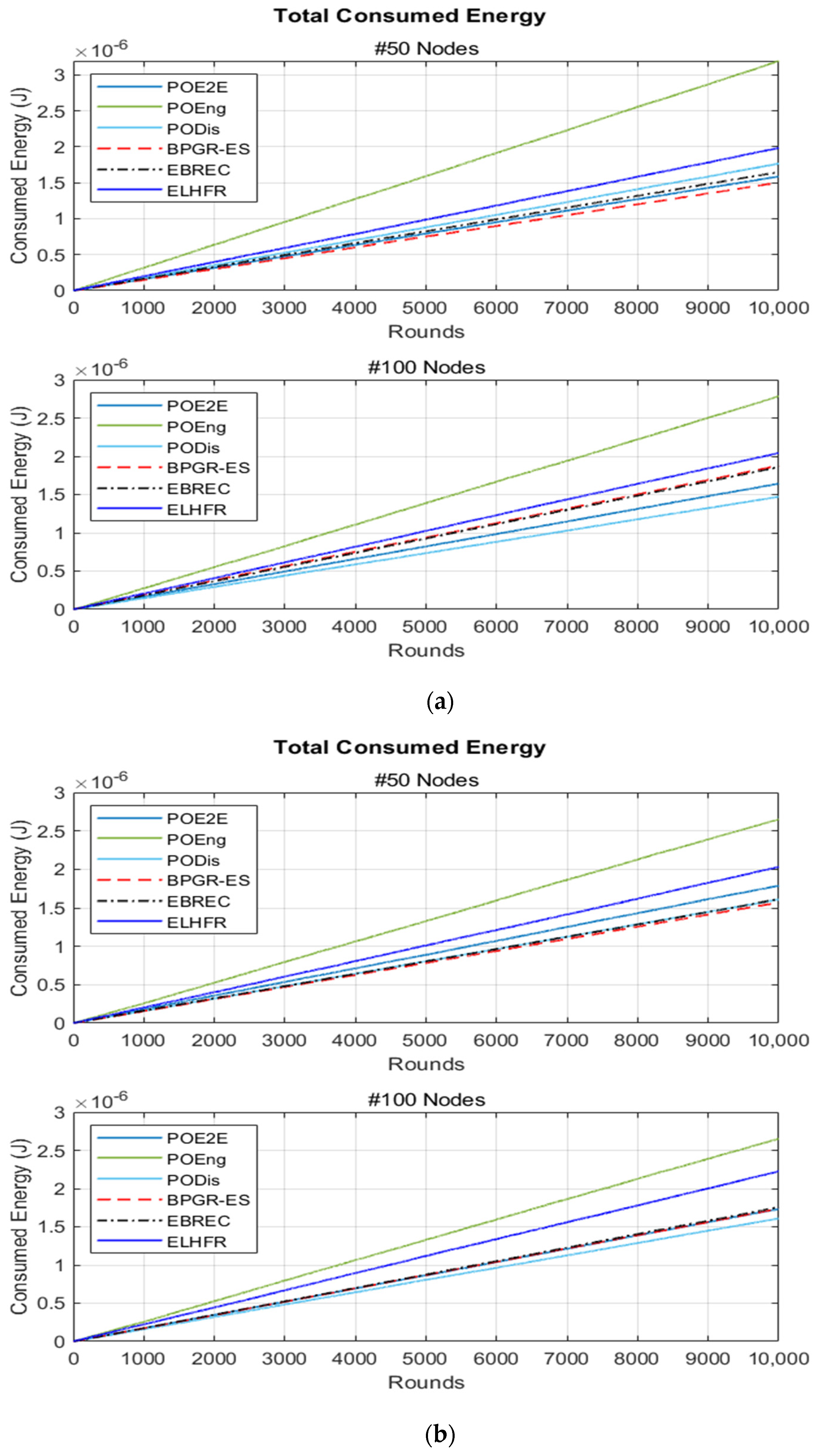
4.2.2. Energy Consumption Evaluation
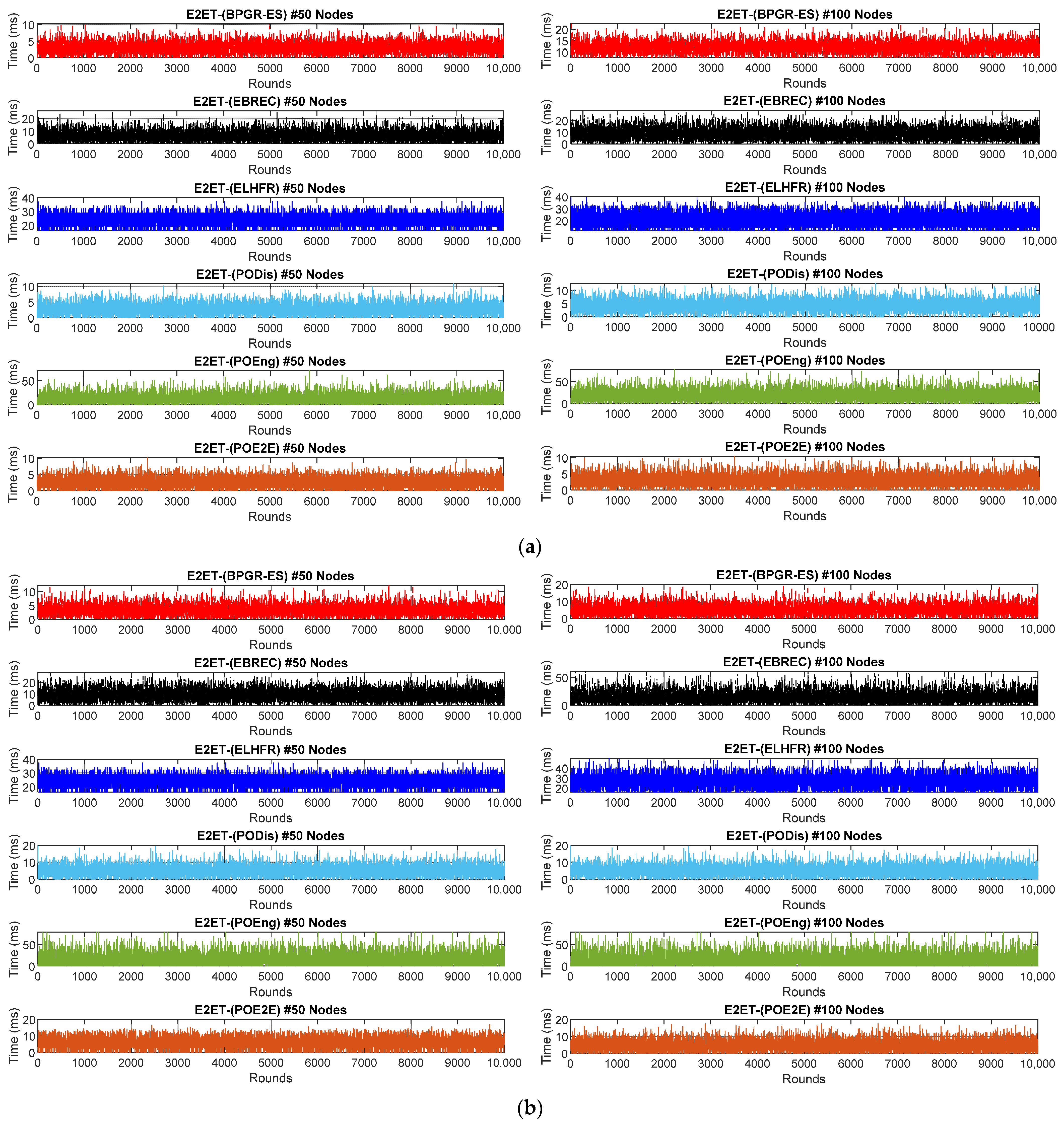
4.2.3. End-to-End Transmission Time Evaluation
4.3. Performance Comparison
- Criteria of paths: the primary path and formula specified by the GR algorithm for each sensor node (i.e., which is the path by which a sensor node will attempt to send a data packet for the first time) and what is the criterion for this selection;
- Reliability: the ratio of delivery of the data packets to the measured by averaging the PDR results for each algorithm across the different topologies;
- Balance of energy consumption: the ration of energy consumption balance between all of sensor nodes in the network area determined by averaging the EIF results for each algorithm across the various topologies;
- Transmission time: the time it takes each algorithm to send a data packet from a source sensor node to the determined by lower time and higher time in the E2ET results for each algorithm across the different topologies.
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, L.D.; He, W.; Li, S. Internet of Things in Industries: A Survey. IEEE Trans. Ind. Inform. 2014, 10, 2233–2243. [Google Scholar] [CrossRef]
- Nobre, M.; Silva, I.; Guedes, L. Routing and Scheduling Algorithms for WirelessHARTNetworks: A Survey. Sensors 2015, 15, 9703–9740. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sepulcre, M.; Gozalvez, J.; Coll-Perales, B. Multipath QoS-Driven Routing Protocol for Industrial Wireless Networks. J. Netw. Comput. Appl. 2016, 74, 121–132. [Google Scholar] [CrossRef]
- Sha, M.; Gunatilaka, D.; Wu, C.; Lu, C. Empirical Study and Enhancements of Industrial Wireless Sensor-Actuator Network Protocols. IEEE Internet Things J. 2017, 4, 696–704. [Google Scholar] [CrossRef]
- Zhao, J.; Liang, Z.; Zhao, Y. ELHFR: A graph routing in industrial wireless mesh network. In Proceedings of the 2009 IEEE International Conference on Information and Automation, Zhuhai/Macau, China, 22–24 June 2009; pp. 106–110. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, F.; Ju, L.; Jia, Z.; Zhang, Z. Reliable and Energy Efficient Routing Algorithm for WirelessHART. In International Conference on Algorithms and Architectures for Parallel Processing; Springer: Cham, Switzerland, 2014; Volume 8630, pp. 192–203. [Google Scholar] [CrossRef]
- HCF. HCF_SPEC-065: 2.4 GHz DSSS O-QPSK Physical Layer Specification. Available online: https://library.fieldcommgroup.org/20065/TS20065/1.1/#page=5 (accessed on 19 May 2021).
- Alharbi, N.; Mackenzie, L.; Pezaros, D. Effect of unequal clustering algorithms in WirelessHART networks. In Proceedings of the 2021 3rd IEEE Middle East and North Africa COMMunications Conference (MENACOMM), Agadir, Morocco, 3–5 December 2021; pp. 7–12. [Google Scholar] [CrossRef]
- Wu, C.; Gunatilaka, D.; Sha, M.; Lu, C. Real-time wireless routing for industrial internet of things. In Proceedings of the IEEE/ACM Third International Conference on Internet-of-Things Design and Implementation, Orlando, FL, USA, 17–20 April 2018. [Google Scholar] [CrossRef]
- Al Aghbari, Z.; Khedr, A.M.; Osamy, W.; Arif, I.; Agrawal, D.P. Routing in Wireless Sensor Networks Using Optimization Techniques: A Survey. Wirel. Pers. Commun. 2020, 111, 2407–2434. [Google Scholar] [CrossRef]
- Parwekar, P.; Rodda, S.; Kalla, N. A Study of the Optimization Techniques for Wireless Sensor Networks (WSNs). In Proceedings of Fourth International Conference INDIA; Springer: Singapore, 2018; Volume 672, pp. 909–915. [Google Scholar] [CrossRef]
- Han, X.; Ma, X.; Chen, D. Energy-balancing routing algorithm for WirelessHART. In Proceedings of the IEEE International Workshop on Factory Communication Systems, WFCS, Sundsvall, Sweden, 27–29 May 2019; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2019; Volume 2019. [Google Scholar] [CrossRef]
- Hong, S.H.; Ding, Y.M.; Li, X.H.; Luo, Z.; Kim, J.B. An energy-balancing Graph-Routing algorithm for WirelessHART networks. In Proceedings of the 2015 IEEE Asia Pacific Conference on Wireless and Mobile (APWiMob), Bandung, Indonesia, 27–29 August 2015; pp. 239–245. [Google Scholar] [CrossRef]
- Salam, H.A.; Khan, B.M. IWSN-Standards, Challenges and Future. IEEE Potentials 2016, 35, 9–16. [Google Scholar] [CrossRef]
- Hansen, N.; Ostermeier, A. Completely Derandomized Self-Adaptation in Evolution Strategies. Evol. Comput. 2001, 9, 159–195. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Li, W.; Liu, A. Improved Grey Wolf Optimization Based on the Two-Stage Search of Hybrid CMA-ES. Soft Comput. 2020, 24, 1097–1115. [Google Scholar] [CrossRef]
- Zhang, S.; Yan, A.; Ma, T. Energy-Balanced Routing for Maximizing Network Lifetime in WirelessHART. Int. J. Distrib. Sens. Netw. 2013, 2013, 173185. [Google Scholar] [CrossRef] [Green Version]
- Künzel, G.; Cainelli, G.; Müller, I.; Pereira, C.E.; Indrusiak, L.S. A Reliable and Low-Latency Graph-Routing Approach for IWSN Using Q-Routing. In Proceedings of the 2020 X Brazilian Symposium on Computing Systems Engineering (SBESC), Florianopolis, Brazil, 24–27 November 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Yuxin, W.; Gaofeng, N.; Hui, T. A Graph Routing Algorithm Enhancing Wireless Sensor Networks Lifetime. In Proceedings of the 2021 International Conference on Space-Air-Ground Computing (SAGC), Huizhou, China, 23–25 October 2021. [Google Scholar] [CrossRef]
- Abdulrab, H.; Hussin, F.A.; Abd Aziz, A.; Awang, A.; Ismail, I.; Devan, P.A.M. Reliable Fault Tolerant-Based Multipath Routing Model for Industrial Wireless Control Systems. Appl. Sci. 2022, 12, 544. [Google Scholar] [CrossRef]
- Jiang, A.; Zheng, L. An Effective Hybrid Routing Algorithm in WSN: Ant Colony Optimization in Combination with Hop Count Minimization. Sensors 2018, 18, 1020. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baroudi, U.; Bin-Yahya, M.; Alshammari, M.; Yaqoub, U. Ticket-Based QoS Routing Optimization Using Genetic Algorithm for WSN Applications in Smart Grid. J. Ambient Intell. Hum. Comput. 2019, 10, 1325–1338. [Google Scholar] [CrossRef]
- Deng, Y.; Chen, Y.; Zhang, Y.; Mahadevan, S. Fuzzy Dijkstra Algorithm for Shortest Path Problem under Uncertain Environment. Appl. Soft Comput. 2012, 12, 1231–1237. [Google Scholar] [CrossRef]
- Wang, M.; Wang, S.; Zhang, B. APTEEN Routing Protocol Optimization in Wireless Sensor Networks Based on Combination of Genetic Algorithms and Fruit Fly Optimization Algorithm. Ad Hoc Netw. 2020, 102, 102138. [Google Scholar] [CrossRef]
- Chouhan, N.; Jain, S.C. Tunicate Swarm Grey Wolf Optimization for Multi-Path Routing Protocol in IoT Assisted WSN Networks. J. Ambient Intell. Hum. Comput. 2020, 1–17. [Google Scholar] [CrossRef]
- Maheshwari, P.; Sharma, A.K.; Verma, K. Energy Efficient Cluster Based Routing Protocol for WSN Using Butterfly Optimization Algorithm and Ant Colony Optimization. Ad Hoc Netw. 2021, 110, 102317. [Google Scholar] [CrossRef]
- Patra, B.K.; Mishra, S.; Patra, S.K. Genetic Algorithm-Based Energy-Efficient Clustering with Adaptive Grey Wolf Optimization-Based Multipath Routing in Wireless Sensor Network to Increase Network Life Time. In Intelligent Systems; Udgata, S.K., Sethi, S., Gao, X.-Z., Eds.; Lecture Notes in Networks and Systems; Springer Nature: Singapore, 2022; pp. 499–512. [Google Scholar] [CrossRef]
- Dennis, J.E., Jr.; Jorge, J.M. Quasi-Newton Methods, Motivation and Theory. SIAM Rev. 1977, 19, 46–89. [Google Scholar] [CrossRef] [Green Version]
- Ullah, U.; Shahid, A.R.; Irfan, M.; Qadir, J.; Nawaz, M.; Qureshi, R. A Stable and Reliable Short-Path Routing Scheme for Efficient Acoustic Wireless Sensor Networks (AWSNs). IEEE Access 2020, 8, 1458–1474. [Google Scholar] [CrossRef]
- Shi, F.; Tuo, X.; Yang, S.; Li, H.; Sensors, R.S. Multiple Two-Way Time Message Exchange (Ttme) Time Synchronization for Bridge Monitoring Wireless Sensor Networks. Sensors 2017, 17, 1027. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hart Communication Protocol. Network Management Specification. HCF_SPEC-085, FCG TS20085. Available online: https://library.fieldcommgroup.org/20085/TS20085/3.0/#page=24 (accessed on 20 August 2021).
- Han, S.; Zhu, X.; Mok, A.K.; Chen, D.; Nixon, M. Reliable and real-time communication in industrial wireless mesh networks. In Proceedings of the 17th IEEE Real-Time and Embedded Technology and Applications Symposium, Chicago, IL, USA, 11–14 April 2011. [Google Scholar]
- Saifullah, A.; Xu, Y.; Lu, C.; Chen, Y. Real-Time Scheduling for WirelessHART Networks. In Proceedings of the 2010 31st IEEE Real-Time Systems Symposium, San Diego, CA, USA, 30 November–3 December 2010; pp. 150–159. [Google Scholar] [CrossRef] [Green Version]
- Oyewobi, S.S.; Hancke, G.P. A Survey of Cognitive Radio Handoff Schemes, Challenges and Issues for Industrial Wireless Sensor Networks (CR-IWSN). J. Netw. Comput. Appl. 2017, 97, 140–156. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Simulation area | 100 × 100 and 200 × 200 |
| Number of nodes | 50 and 100 |
| Nodes positions | Random |
| Gateway ( | One |
| Access points (APs) | Two APs |
| Physical layer | IEEE 802.15.4 (2006) |
| Propagation Model | O-QPSK |
| Communication range | 35 and 75 m |
| Transmission power | 0 dBm |
| Node initial energy | 0.5 J |
| Maximum Packet size | 133 Bytes |
| Radio frequency | 2.4 GHz |
| Medium Access Control (MAC) | TDMA with 10 ms time slot |
| Parameters | Value |
|---|---|
| Population size | |
| Number of the variables | Shortlist |
| Specifies the direction | |
| Upper bound to the Shortlist decision | |
| Lower bound to the Shortlist decision |
| GR Algorithms | Criteria of Paths | Reliability | Balance of Energy Consumption | Transmission Time |
|---|---|---|---|---|
| POE2ET | Lower transmission time of CMA-ES | 98.8% | 75.1% | Between 4 to 17 ms |
| POEng | Highest residual energy of CMA-ES | 98.75% | 57.88% | Between 7 to 55 ms |
| PODis | Shortest distance of CMA-ES | 98.84% | 37.33% | Between 5 to 21 ms |
| BPGR-ES | Multiple Objectives of CMA-ES | 99.57% | 87.73% | Between 5 to 25 ms |
| EBREC [12] | Highest residual energy of BFS | 98.6% | 86.28% | Between 8 to 53 ms |
| ELHFR [5] | Highest received signal level of BFS | 97.78% | 51.2% | Between 7 to 48 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alharbi, N.; Mackenzie, L.; Pezaros, D. Enhancing Graph Routing Algorithm of Industrial Wireless Sensor Networks Using the Covariance-Matrix Adaptation Evolution Strategy. Sensors 2022, 22, 7462. https://doi.org/10.3390/s22197462
Alharbi N, Mackenzie L, Pezaros D. Enhancing Graph Routing Algorithm of Industrial Wireless Sensor Networks Using the Covariance-Matrix Adaptation Evolution Strategy. Sensors. 2022; 22(19):7462. https://doi.org/10.3390/s22197462
Chicago/Turabian StyleAlharbi, Nouf, Lewis Mackenzie, and Dimitrios Pezaros. 2022. "Enhancing Graph Routing Algorithm of Industrial Wireless Sensor Networks Using the Covariance-Matrix Adaptation Evolution Strategy" Sensors 22, no. 19: 7462. https://doi.org/10.3390/s22197462
APA StyleAlharbi, N., Mackenzie, L., & Pezaros, D. (2022). Enhancing Graph Routing Algorithm of Industrial Wireless Sensor Networks Using the Covariance-Matrix Adaptation Evolution Strategy. Sensors, 22(19), 7462. https://doi.org/10.3390/s22197462