
Infrared Single-Frame Small Target Detection Based on Block-Matching
Abstract
:1. Introduction
2. Infrared Block-Matching Model
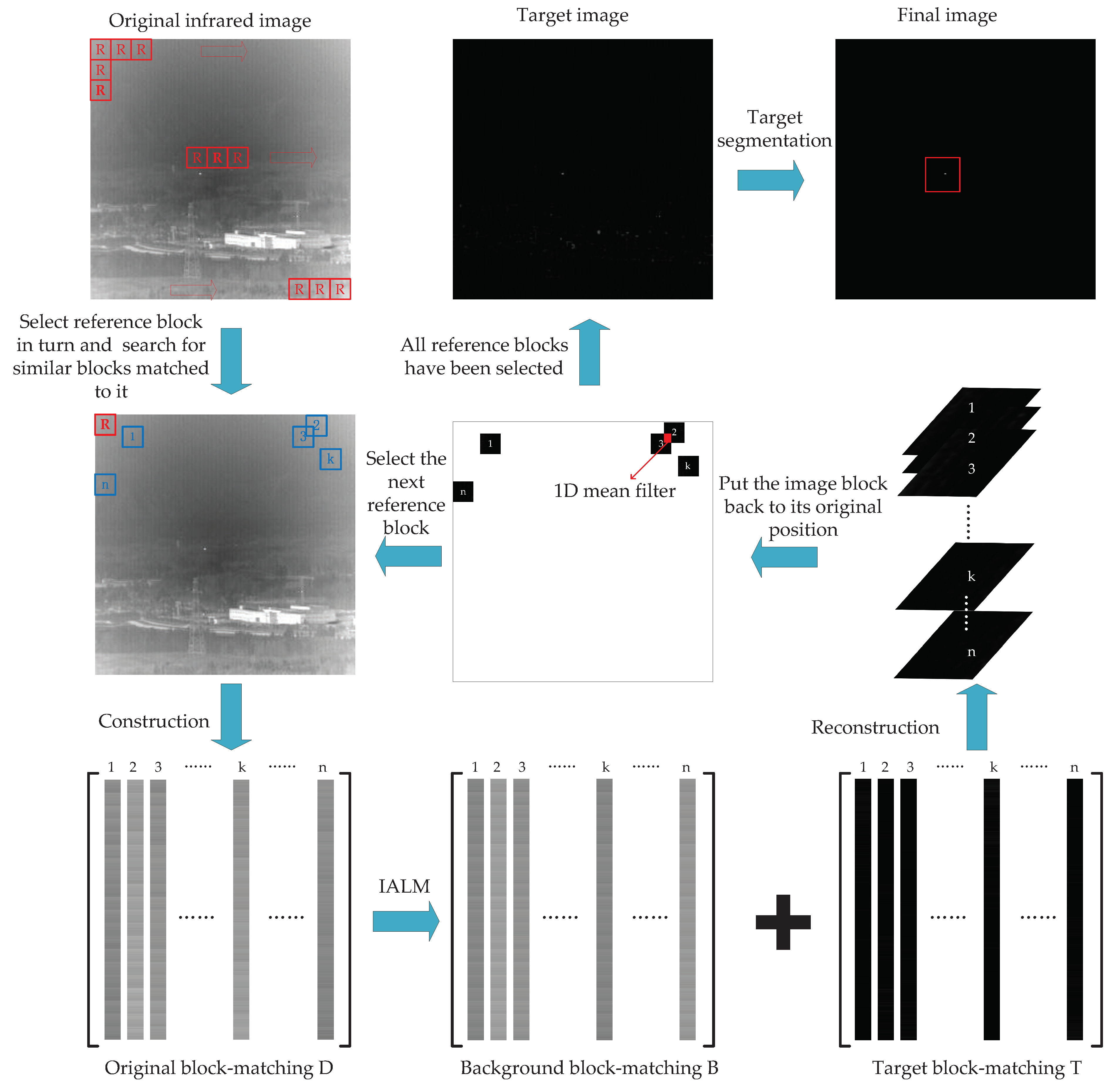
2.1. Construction of Infrared Block-Matching Model
2.2. Analysis of Infrared Block-Matching Model
2.3. Reconstruction of Infrared Images from the Infrared Block-Matching Model
3. Small Target Detection Based on Block-Matching
3.1. Solution of Infrared Small Target Detection
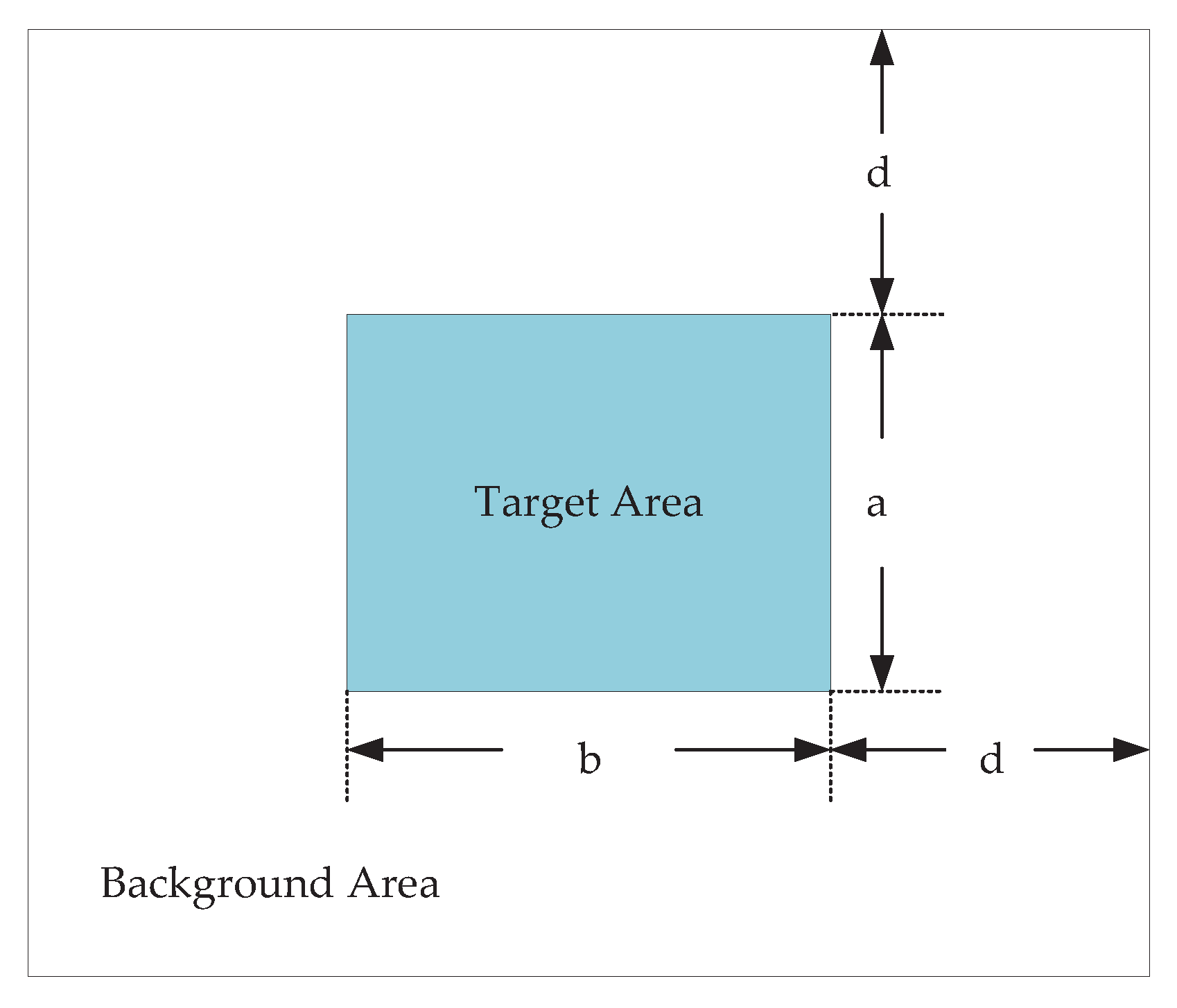
3.2. Target Segmentation
3.3. The Entire Procedure of Small Target Detection
4. Experiments
4.1. Experimental Settings
4.2. Effect of Block Size
4.3. Contrast Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hong, R.; Xiang, C.; Liu, H.; Glowacz, A.; Pan, W. Visualizing the knowledge structure and research evolution of infrared detection technology studies. Information 2019, 10, 227. [Google Scholar] [CrossRef] [Green Version]
- Rawat, S.S.; Verma, S.K.; Kumar, Y. Review on recent development in infrared small target detection algorithms. Procedia Comput. Sci. 2020, 167, 2496–2505. [Google Scholar] [CrossRef]
- Guan, X.; Zhang, L.; Huang, S.; Peng, Z. Infrared small target detection via non-convex tensor rank surrogate joint local contrast energy. Remote Sens. 2020, 12, 1520. [Google Scholar] [CrossRef]
- Johnston, L.A.; Krishnamurthy, V. Performance analysis of a dynamic programming track before detect algorithm. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 228–242. [Google Scholar] [CrossRef] [Green Version]
- Salmond, D.J.; Birch, H. A particle filter for track-before-detect. In Proceedings of the 2001 American Control Conference (Cat. No. 01CH37148), Arlington, VA, USA, 25–27 June 2001; Volume 5, pp. 3755–3760. [Google Scholar]
- Reed, I.S.; Gagliardi, R.M.; Stotts, L.B. Optical moving target detection with 3-D matched filtering. IEEE Trans. Aerosp. Electron. Syst. 1988, 24, 327–336. [Google Scholar] [CrossRef]
- Dong, L.; Wang, B.; Zhao, M.; Xu, W. Robust infrared maritime target detection based on visual attention and spatiotemporal filtering. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3037–3050. [Google Scholar] [CrossRef]
- Huang, K.; Tao, D.; Yuan, Y.; Li, X.; Tan, T. Biologically inspired features for scene classification in video surveillance. IEEE Trans. Syst. Man Cybern. Part B 2010, 41, 307–313. [Google Scholar] [CrossRef]
- Chen, C.P.; Li, H.; Wei, Y.; Xia, T.; Tang, Y.Y. A local contrast method for small infrared target detection. IEEE Trans. Geosci. Remote Sens. 2013, 52, 574–581. [Google Scholar] [CrossRef]
- Han, J.; Ma, Y.; Zhou, B.; Fan, F.; Liang, K.; Fang, Y. A robust infrared small target detection algorithm based on human visual system. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2168–2172. [Google Scholar]
- Qin, Y.; Li, B. Effective infrared small target detection utilizing a novel local contrast method. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1890–1894. [Google Scholar] [CrossRef]
- Wei, Y.; You, X.; Li, H. Multiscale patch-based contrast measure for small infrared target detection. Pattern Recognit. 2016, 58, 216–226. [Google Scholar] [CrossRef]
- Deng, H.; Sun, X.; Liu, M.; Ye, C.; Zhou, X. Small infrared target detection based on weighted local difference measure. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4204–4214. [Google Scholar] [CrossRef]
- Han, J.; Liang, K.; Zhou, B.; Zhu, X.; Zhao, J.; Zhao, L. Infrared small target detection utilizing the multiscale relative local contrast measure. IEEE Geosci. Remote Sens. Lett. 2018, 15, 612–616. [Google Scholar] [CrossRef]
- Guan, X.; Peng, Z.; Huang, S.; Chen, Y. Gaussian scale-space enhanced local contrast measure for small infrared target detection. IEEE Geosci. Remote Sens. Lett. 2019, 17, 327–331. [Google Scholar] [CrossRef]
- Han, J.; Moradi, S.; Faramarzi, I.; Zhang, H.; Zhao, Q.; Zhang, X.; Li, N. Infrared small target detection based on the weighted strengthened local contrast measure. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1670–1674. [Google Scholar] [CrossRef]
- Deshpande, S.D.; Meng, H.E.; Venkateswarlu, R.; Chan, P. Max-mean and max-median filters for detection of small targets. Proc. SPIE 1999, 3809, 74–83. [Google Scholar]
- Tom, V.T.; Peli, T.; Leung, M.; Bondaryk, J.E. Morphology-based algorithm for point target detection in infrared backgrounds. Proc. SPIE 1993, 1954, 2–11. [Google Scholar]
- Bai, X.; Zhou, F. Analysis of new top-hat transformation and the application for infrared dim small target detection. Pattern Recognit. 2010, 43, 2145–2156. [Google Scholar] [CrossRef]
- Zhu, H.; Liu, S.; Deng, L.; Li, Y.; Xiao, F. Infrared small target detection via low-rank tensor completion with top-hat regularization. IEEE Trans. Geosci. Remote Sens. 2019, 58, 1004–1016. [Google Scholar] [CrossRef]
- Hadhoud, M.M.; Thomas, D.W. The two-dimensional adaptive LMS (TDLMS) algorithm. IEEE Trans. Circuits Syst. 1988, 35, 485–494. [Google Scholar] [CrossRef]
- Bae, T.W.; Sohng, K.I. Small target detection using bilateral filter based on edge component. J. Infrared Millim. Terahertz Waves Vol. 2010, 31, 735–743. [Google Scholar] [CrossRef]
- Gao, C.; Meng, D.; Yang, Y.; Wang, Y.; Zhou, X.; Hauptmann, A.G. Infrared patch-image model for small target detection in a single image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef] [PubMed]
- Dai, Y.; Wu, Y.; Song, Y. Infrared small target and background separation via column-wise weighted robust principal component analysis. Infrared Phys. Technol. 2016, 77, 421–430. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y. Reweighted infrared patch-tensor model with both nonlocal and local priors for single-frame small target detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3752–3767. [Google Scholar] [CrossRef] [Green Version]
- Dai, Y.; Wu, Y.; Song, Y.; Guo, J. Non-negative infrared patch-image model Robust target-background separation via partial sum minimization of singular values. The title of the cited article. Infrared Phys. Technol. 2017, 81, 182–194. [Google Scholar] [CrossRef]
- He, Y.; Li, M.; Zhang, J.; An, Q. Small infrared target detection based on low-rank and sparse representation. Infrared Phys. Technol. 2015, 68, 98–109. [Google Scholar] [CrossRef]
- Wang, C.; Qin, S. Adaptive detection method of infrared small target based on target-background separation via robust principal component analysis. Infrared Phys. Technol. 2015, 69, 123–135. [Google Scholar] [CrossRef]
- Wang, X.; Peng, Z.; Kong, D.; Zhang, P.; He, Y. Infrared dim target detection based on total variation regularization and principal component pursuit. Image Vis. Comput. 2017, 63, 1–9. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, L.; Zhang, T.; Cao, S.; Peng, Z. Infrared small target detection via non-convex rank approximation minimization joint l2,1 norm. Remote Sens. 2018, 10, 1821. [Google Scholar] [CrossRef] [Green Version]
- Rawat, S.S.; Alghamdi, S.; Kumar, G.; Alotaibi, Y.; Khalaf, O.I.; Verma, L.P. Infrared small target detection based on partial sum minimization and total variation. Mathematics 2022, 10, 671. [Google Scholar] [CrossRef]
- Zontak, M.; Irani, M. Internal statistics of a single natural image. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 977–984. [Google Scholar]
- Buades, A.; Coll, B.; Morel, J.M. A non-local algorithm for image denoising. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–25 June 2005; pp. 60–65. [Google Scholar]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image denoising by sparse 3-D transform-domain collaborative filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef]
- Mairal, J.; Bach, F.; Ponce, J.; Sapiro, G.; Zisserman, A. Non-local sparse models for image restoration. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 2272–2279. [Google Scholar]
- Candès, E.J.; Li, X.; Ma, Y.; Wright, J. Robust principal component analysis? J. ACM (JACM) 2011, 58, 1–37. [Google Scholar] [CrossRef]
- Hstad, J. Tensor rank is np-complete. J. Algorithms 1990, 31, 644–654. [Google Scholar] [CrossRef]
- Lin, Z.; Ganesh, A.; Wright, J.; Wu, L.; Chen, M.; Ma, Y. Fast convex optimization algorithms for exact recovery of a corrupted low-rank matrix. In Proceedings of the Computational Advances in Multi-Sensor Adaptive Processing, Aruba, Dutch Antilles, 13–16 December 2009. [Google Scholar]
- Lin, Z.; Chen, M.; Ma, Y. The augmented lagrange multiplier method for exact recovery of corrupted low-rank matrices. arXiv 2010, arXiv:1009.5055v3. [Google Scholar]
- Yuan, X.; Yang, J. Sparse and low-rank matrix decomposition via alternating direction methods. Preprint 2009, 12, 1–16. [Google Scholar]
- Zhou, Z.; Li, X.; Wright, J.; Candes, E.; Ma, Y. Stable principal component pursuit. In Proceedings of the 2010 IEEE International Symposium on Information Theory, Austin, TX, USA, 13–18 June 2010; pp. 1518–1522. [Google Scholar]
- Hui, B.; Song, Z.; Fan, H.; Zhong, P.; Hu, W.; Zhang, X.; Lin, J.; Su, H.; Jin, W.; Zhang, Y.; et al. Infrared dim and small aircraft target detection and tracking dataset from infrared image in ground/air background. Chin. Sci. Data 2020, 5, 286–297. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Parameters |
|---|---|
| Max-Mean [17] | Filter size: 15 × 15 |
| Max-Median [17] | Filter size: 15 × 15 |
| Top-Hat [18] | Shape: square, filter size:15 × 15 |
| IPI [23] | Patch size: 50 × 50, sliding step: 10, = , |
| TV-PCP [29] | Patch size: 50 × 50, sliding step: 14, , = , , , maxIter = 250, |
| N0. | Frame | Image Size | Characteristics |
|---|---|---|---|
| 1 | 200 | 256 × 256 | Complex background with trees and highlighted interference |
| 2 | 200 | 256 × 256 | Complex background with thickets |
| 3 | 200 | 256 × 256 | Complex ground background with trees and road |
| 4 | 200 | 256 × 256 | Complex background with constructions |
| Top-Hat | Max-Mean | Max-Median | IPI | TV-PCP | Proposed Method | |
|---|---|---|---|---|---|---|
| 10th frame of Seq.1 | ||||||
| BSF | 1.9150 | 2.2114 | 2.2241 | 2.7063 | 2.8176 | 2.9542 |
| LSNRG | 1.8555 | 2.4063 | 2.2001 | 2.8511 | 2.3334 | 3.3821 |
| SCRG | 1.8726 | 3.6916 | 4.1848 | 4.5444 | 4.6315 | 4.8301 |
| 10th frame of Seq.2 | ||||||
| BSF | 1.4953 | 1.7571 | 2.1528 | 1.9926 | 1.8748 | 2.2620 |
| LSNRG | 1.0046 | 0.8935 | 1.0860 | 1.0236 | 1.0116 | 1.0704 |
| SCRG | 1.3216 | 2.3538 | 2.8490 | 2.6366 | 3.1674 | 2.8290 |
| 10th frame of Seq.3 | ||||||
| BSF | 1.4840 | 1.5812 | 1.5812 | 1.8878 | 1.3768 | 1.9611 |
| LSNRG | 1.1988 | 1.3980 | 1.1080 | 1.4019 | 1.2662 | 1.4470 |
| SCRG | 1.0564 | 2.3859 | 2.4129 | 3.1280 | 2.8973 | 3.1363 |
| 10th frame of Seq.4 | ||||||
| BSF | 1.7803 | 2.6111 | 2.8659 | 3.0519 | 2.3717 | 2.9747 |
| LSNRG | 2.0182 | 3.0833 | 2.4292 | 2.5882 | 1.4800 | 2.5807 |
| SCRG | 1.6963 | 3.9429 | 4.0535 | 4.3271 | 4.1347 | 4.2013 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Man, Y.; Yang, Q.; Chen, T. Infrared Single-Frame Small Target Detection Based on Block-Matching. Sensors 2022, 22, 8300. https://doi.org/10.3390/s22218300
Man Y, Yang Q, Chen T. Infrared Single-Frame Small Target Detection Based on Block-Matching. Sensors. 2022; 22(21):8300. https://doi.org/10.3390/s22218300
Chicago/Turabian StyleMan, Yi, Qingyun Yang, and Tao Chen. 2022. "Infrared Single-Frame Small Target Detection Based on Block-Matching" Sensors 22, no. 21: 8300. https://doi.org/10.3390/s22218300
APA StyleMan, Y., Yang, Q., & Chen, T. (2022). Infrared Single-Frame Small Target Detection Based on Block-Matching. Sensors, 22(21), 8300. https://doi.org/10.3390/s22218300