

A Novel Application of Deep Learning (Convolutional Neural Network) for Traumatic Spinal Cord Injury Classification Using Automatically Learned Features of EMG Signal

 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. EMG Acquisition Setup and Protocol
2.2. EMG Data Analysis
2.2.1. EMG Data Pre-Processing
2.2.2. Classification Techniques
kNN Classification
CNN Classification
- I.
- The Main Layers of CNN
- II.
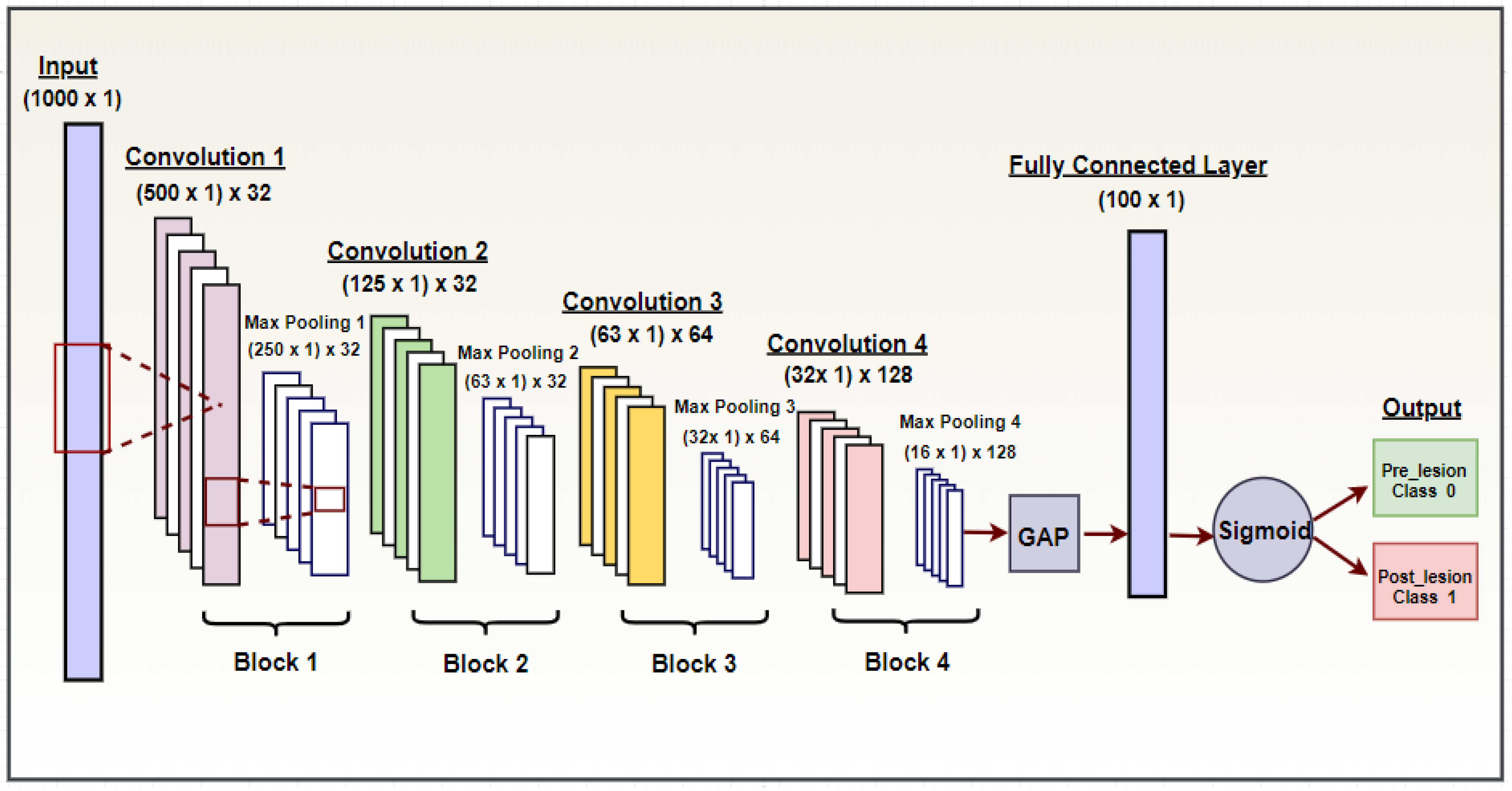
- The Proposed CNN Architecture
- -
- A convolutional layer with 32 filters having a size 5 × 1 and a stride of 2;
- -
- An activation layer using rectified linear units (ReLUs) as activation functions;
- -
- A sub-sampling layer (max-pooling).
- -
- A convolutional layer with 32 filters having a size of 5 × 1 and a stride of 2;
- -
- An activation layer of ReLUs used as activation functions;
- -
- A sub-sampling layer (max-pooling).
- -
- A convolutional layer with 64 filters having a size of 3 × 1 and a stride of 1;
- -
- An activation layer of ReLUs used as activation functions;
- -
- A sub-sampling layer (max-pooling), where a dropout of 0.1 was applied.
- -
- A convolutional layer with 128 filters having a size of 3 × 1 and a stride of 1;
- -
- An activation layer of ReLUs used as activation functions;
- -
- A sub-sampling layer (max-pooling), where a dropout of 0.1 was applied.
3. Results and Discussion
3.1. CNN Hyperparameters
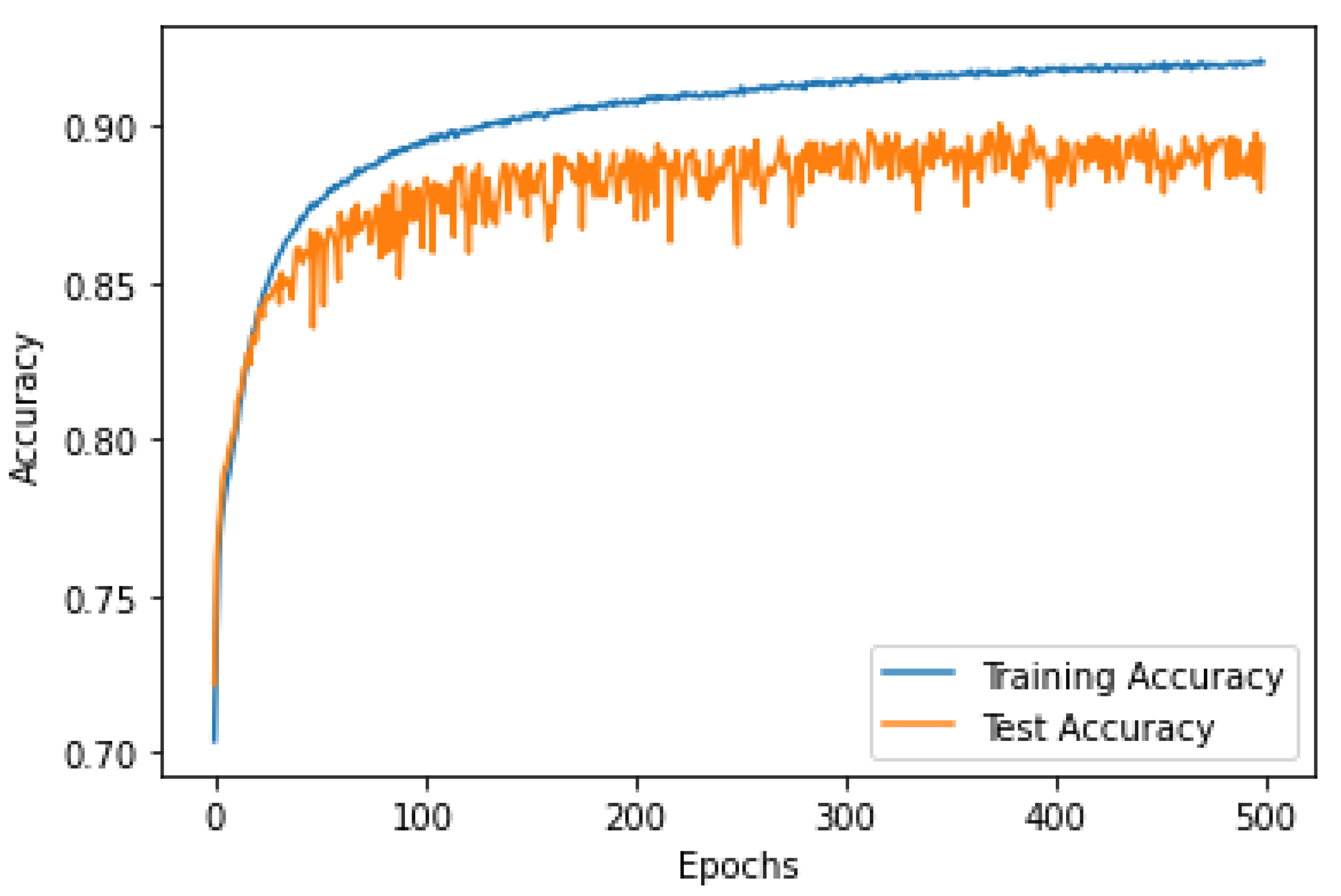
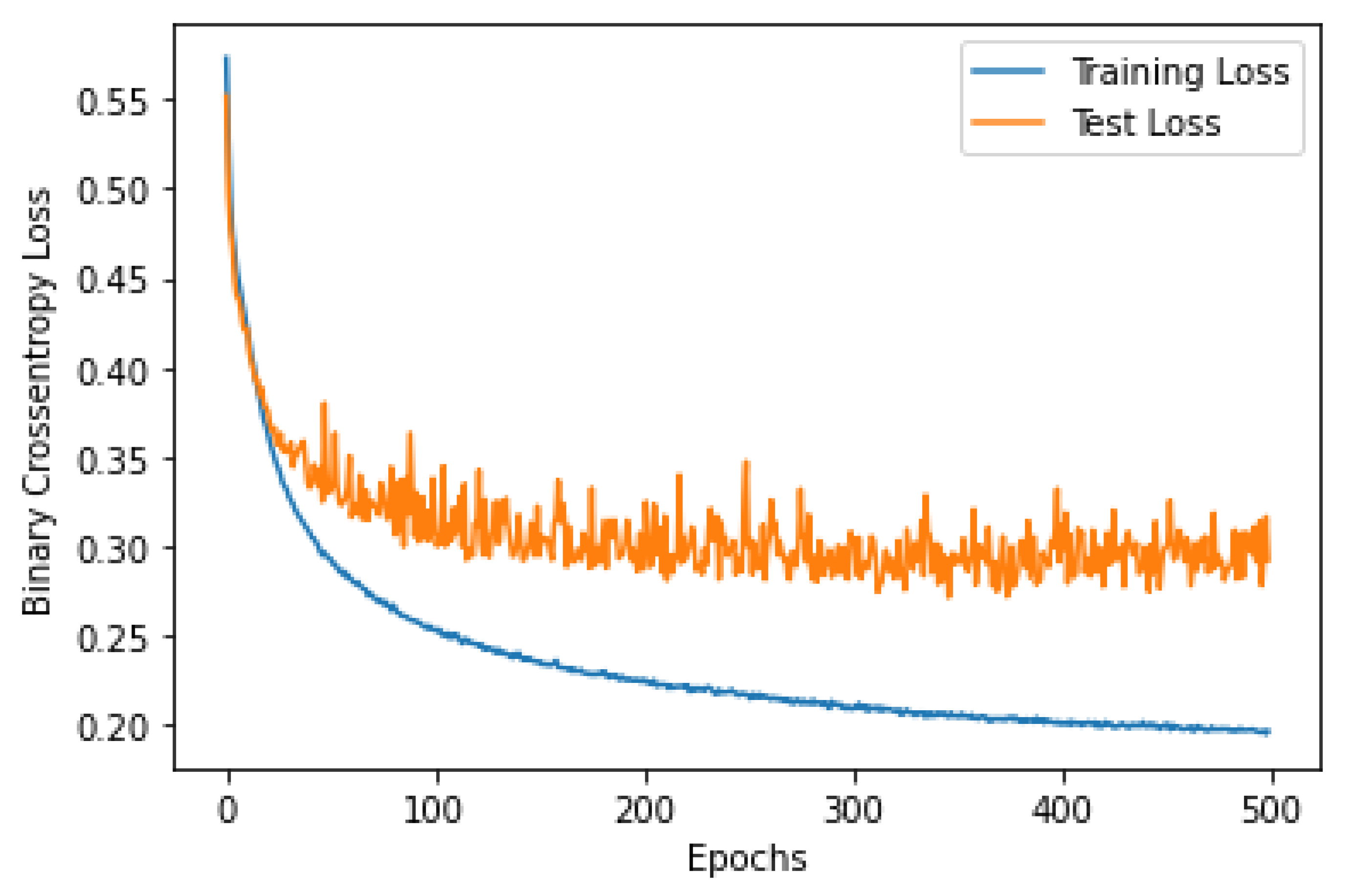
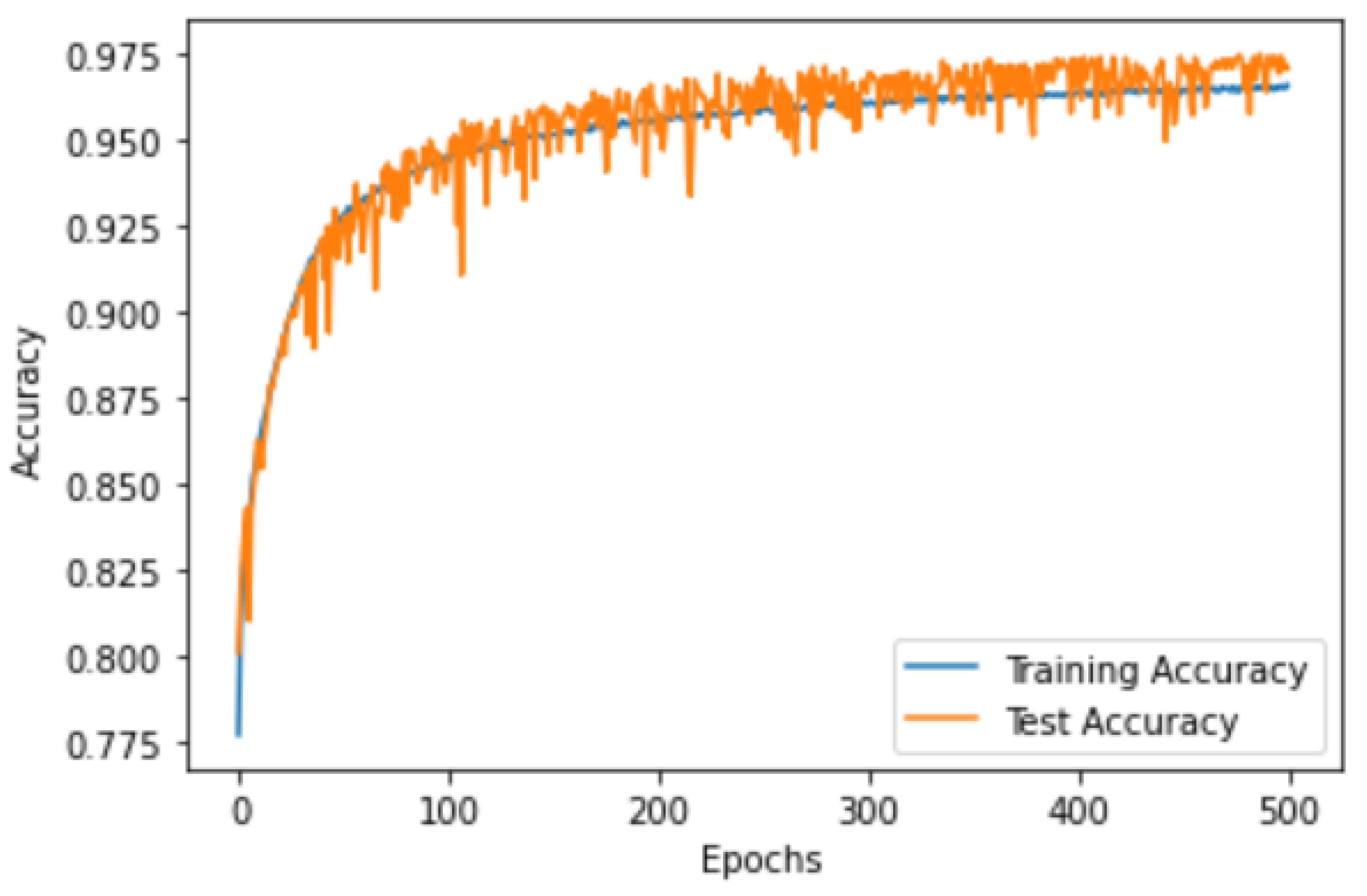
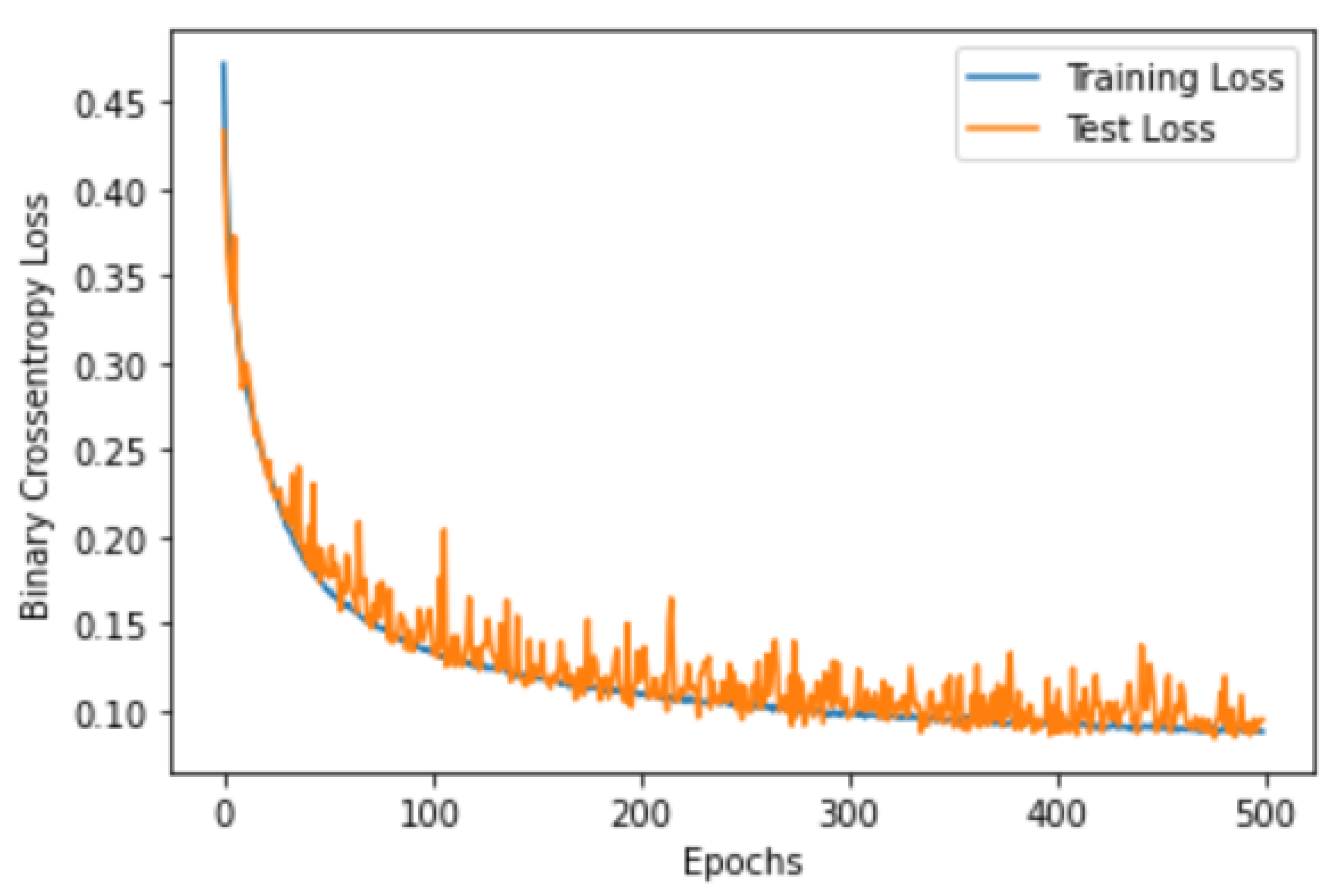
3.2. CNN Over-Fitting
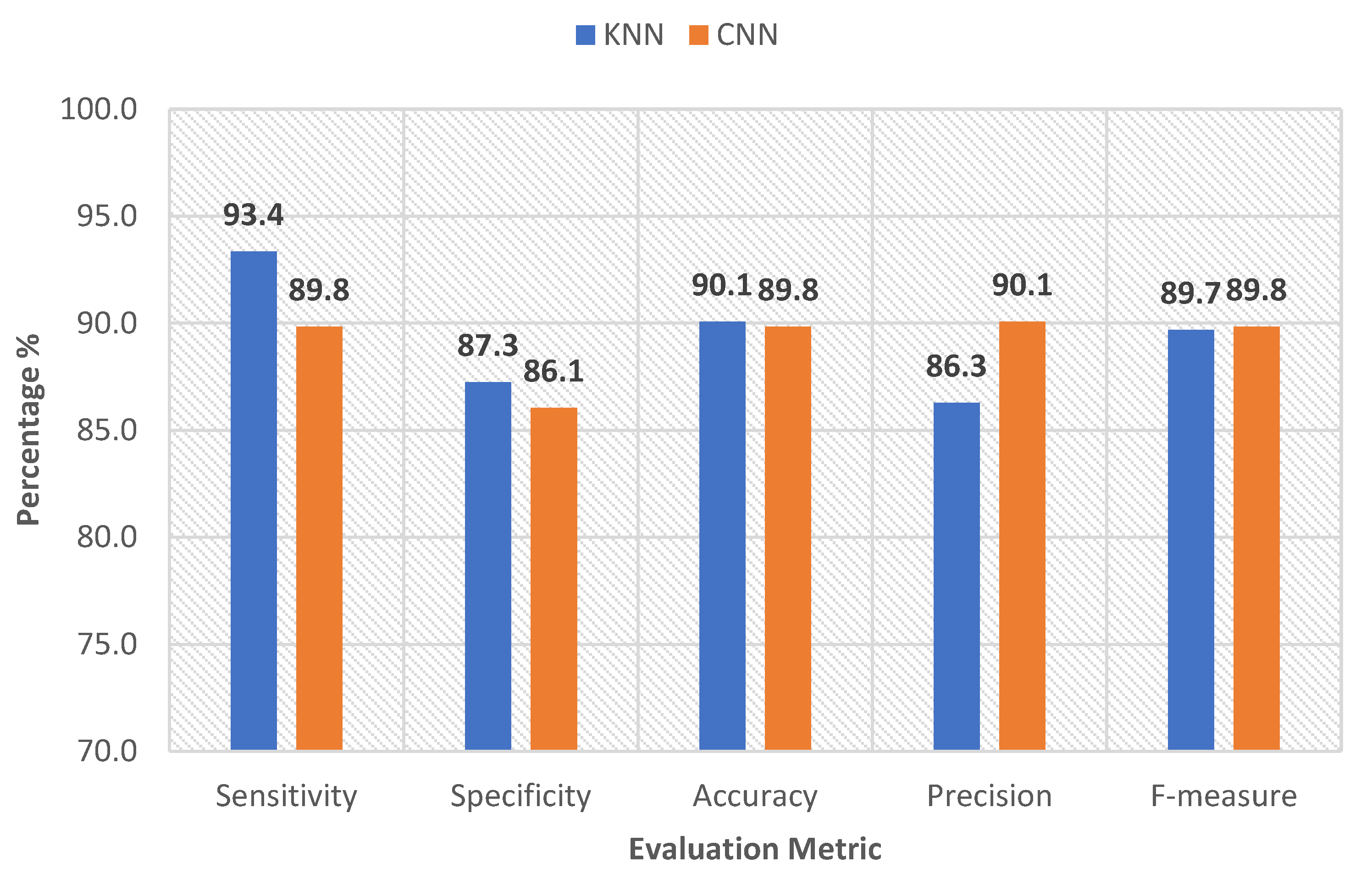
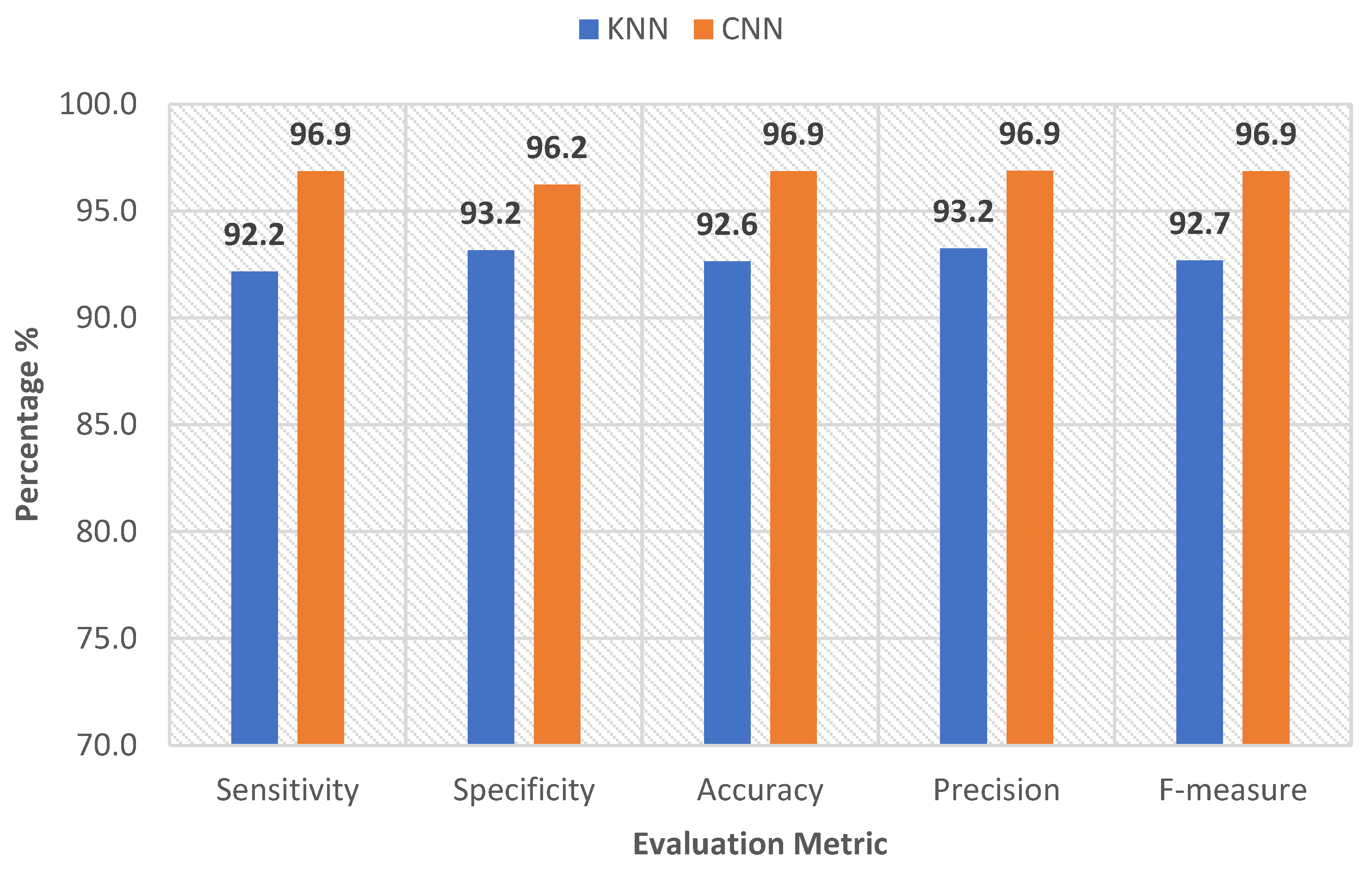
3.3. Performance Metrics of kNN and CNN Classification
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- James, S.L.; Theadom, A.; Ellenbogen, R.G.; Bannick, M.S.; Montjoy-Venning, W.; Lucchesi, L.R.; Abbasi, N.; Abdulkader, R.; Abraha, H.N.; Adsuar, J.C.; et al. Global, regional, and national burden of traumatic brain injury and spinal cord injury, 1990–2016: A systematic analysis for the Global Burden of Disease Study 2016. Lancet Neurol. 2019, 18, 56–87. [Google Scholar] [CrossRef] [Green Version]
- National Spinal Cord Injury Statistical Center, Facts and Figures at a Glance; University of Alabama at Birmingham: Birmingham, AL, USA, 2018.
- Sledge, J.; Graham, W.A.; Westmoreland, S.; Sejdic, E.; Miller, A.; Hoggatt, A.; Nesathurai, S. Spinal cord injury models in non human primates: Are lesions created by sharp instruments relevant to human injuries? Med. Hypotheses 2013, 81, 747–748. [Google Scholar] [CrossRef] [PubMed]
- Seth, N.; Simmons, H.A.; Masood, F.; Graham, W.A.; Rosene, D.L.; Westmoreland, S.V.; Cummings, S.M.; Gwardjan, B.; Sejdic, E.; Hoggatt, A.F.; et al. Model of Traumatic Spinal Cord Injury for Evaluating Pharmacologic Treatments in Cynomolgus Macaques (Macaca fasicularis). Comp. Med. 2018, 68, 63–73. [Google Scholar] [PubMed]
- Carlson, F.D.; Wilkie, D.R. Muscle Physiology; Prentice-Hall: Englewood Cliffs, NJ, USA, 1974; Volume 53. [Google Scholar]
- Basmajian, J.V. Muscle Alive; The Williams and Wilkins Company: Philadelphia, PA, USA, 1985. [Google Scholar]
- Parsaei, H. EMG Signal Decomposition Using Motor Unit Potential Train Validity; University of Watrloo: Waterloo, ON, Canada, 2011. [Google Scholar]
- Kamali, T. A Multiple Instance Learning Approach to Electrophysiological Muscle Classification for Diagnosing Neuromuscular Disorders Using Quantitative EMG; University of Watrloo: Waterloo, ON, Canada, 2018. [Google Scholar]
- Rasheed, S. A Multiclassifier Approach to Motor Unit Potential Classification for EMG Signal Decomposition; University of Waterloo: Waterloo, ON, Canada, 2006. [Google Scholar]
- Masood, F.; Abdullah, H.A.; Seth, N.; Simmons, H.; Brunner, K.; Sejdic, E.; Schalk, D.R.; Graham, W.A.; Hoggatt, A.F.; Rosene, D.L.; et al. Neurophysiological Characterization of a Non-Human Primate Model of Traumatic Spinal Cord Injury Utilizing Fine-Wire EMG Electrodes. Sensors 2019, 19, 3303. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Masood, F.; Farzana, M.; Nesathurai, S.; Abdullah, H.A. Comparison study of classification methods of intramuscular electromyography data for non-human primate model of traumatic spinal cord injury. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2020, 234, 955–965. [Google Scholar] [CrossRef] [PubMed]
- Bzdok, D.; Altman, N.; Krzywinski, M. Statistics versus machine learning. Nat. Methods 2018, 15, 233–234. [Google Scholar] [CrossRef] [PubMed]
- Sankar, V.; Kumar, D.; Clausi, D.A.; Taylor, G.W.; Wong, A. SISC: End-to-End Interpretable Discovery Radiomics-Driven Lung Cancer Prediction via Stacked Interpretable Sequencing Cells. IEEE Access 2019, 7, 145444–145454. [Google Scholar]
- Liu, X.; Li, H.; Lou, C.; Liang, T.; Liu, X.; Wang, H. A New Approach to Fall Detection Based on Improved Dual Parallel Channels Convolutional Neural Network. Sensors 2019, 19, 12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Too, J.; Abdullah, A.; Saad, N.M.; Ali, N.M.; Zawawi, T.T. Featureless EMG pattern recognition based on convolutional neural network. Indones. J. Electr. Eng. Comput. Sci. 2019, 14, 1291. [Google Scholar]
- Hartwell, A.; Kadirkamanathan, V.; Anderson, S.R. Compact Deep Neural Networks for Computationally Efficient Gesture Classification From Electromyography Signals. arXiv 2018, arXiv:1806.08641. [Google Scholar]
- Côté-Allard, U.; Fall, C.L.; Drouin, A.; Campeau-Lecours, A.; Gosselin, C.; Glette, K.; Laviolette, F.; Gosselin, B. Deep Learning for Electromyographic Hand Gesture Signal Classification Using Transfer Learning. arXiv 2018, arXiv:1801.07756. [Google Scholar]
- Côté-Allard, U.; Fall, C.L.; Campeau-Lecours, A.; Gosselin, C.; Laviolette, F.; Gosselin, B. Transfer Learning for sEMG Hand Gestures Recognition Using Convolutional Neural Network. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; p. 6. [Google Scholar]
- Zhai, X.; Jelfs, B.; Chan, R.H.; Tin, C. Self-Recalibrating Surface EMG Pattern Recognition for Neuroprosthesis Control Based on Convolutional Neural Network. Front. Neurosci. 2017, 11, 379. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Du, Y.; Jin, W.; Wei, W.; Hu, Y.; Geng, W. Surface EMG-Based Inter-Session Gesture Recognition Enhanced by Deep Domain Adaptation. Sensors 2017, 17, 3. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Geng, W.; Du, Y.; Jin, W.; Wei, W.; Hu, Y.; Li, J. Gesture recognition by instantaneous surface EMG images. Sci. Rep. 2016, 6, 1–8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Allard, U.C.; Nougarou, F.; Fall, C.L.; Giguère, P.; Gosselin, C.; Laviolette, F.; Gosselin, B. A convolutional neural network for robotic arm guidance using sEMG based frequency-features. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 2464–2470. [Google Scholar]
- Atzori, M.; Cognolato, M.; Müller, H. Deep Learning with Convolutional Neural Networks Applied to Electromyography Data: A Resource for the Classification of Movements for Prosthetic Hands. Front. Neurorobot. 2016, 10, 9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sledge, J.; Mahadevappa, K.; Stacey, P.; Graham, A.; Nesathurai, S. A Speculative Pharmaceutical Cocktail to Treat Spinal Cord Injury. Am. J. Phys. Med. Rehabil. 2016, 95, e108–e110. [Google Scholar] [CrossRef] [PubMed]
- López, V.; Fernández, A.; García, S.; Palade, V.; Herrera, F. An insight into classification with imbalanced data: Empirical results and current trends on using data intrinsic characteristics. Inf. Sci. 2013, 250, 113–141. [Google Scholar] [CrossRef]
- Hand, D.J.; Mannila, H.; Smyth, P. Principles of Data Mining; MIT Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Küçük, H.; Tepe, C.; Eminoğlu, İ. Classification of EMG signals by k-Nearest Neighbor algorithm and Support vector machine methods. In Proceedings of the 2013 21st Signal Processing and Communications Applications Conference (SIU), Haspolat, Turkey, 24–26 April 2013; pp. 1–4. [Google Scholar]
- Al-Faiz, M.Z.; Ali, A.A.; Miry, A.H. A k-nearest neighbor based algorithm for human arm movements recognition using EMG signals. In Proceedings of the 2010 1st International Conference on Energy, Power and Control (EPC-IQ), Basrah, Iraq, 30 November–2 December 2010; pp. 159–167. [Google Scholar]
- Wan, B.; Wu, R.; Zhang, K.; Liu, L. A new subtle hand gestures recognition algorithm based on EMG and FSR. In Proceedings of the 2017 IEEE 21st International Conference on Computer Supported Cooperative Work in Design (CSCWD), Wellington, New Zealand, 26–28 April 2017; pp. 127–132. [Google Scholar]
- Bose, R.; Samanta, K.; Chatterjee, S. Cross-correlation based feature extraction from EMG signals for classification of neuro-muscular diseases. In Proceedings of the 2016 International Conference on Intelligent Control Power and Instrumentation (ICICPI), Kolkata, India, 21–23 October 2016; pp. 241–245. [Google Scholar]
- Lawrence, S.; Giles, C.L.; Tsoi, A.C.; Back, A.D. Face recognition: A convolutional neural-network approach. IEEE Trans. Neural Netw. 1997, 8, 98–113. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Al-Hyari, A.; Szentimrey, H.; Shamli, A.; Martin, T.; Grewal, G.; Areibi, S. A Deep Learning Framework to Predict Routability for FPGA Circuit Placement. In Proceedings of the 2019 29th International Conference on Field Programmable Logic and Applications (FPL), Göteborg, Sweden, 9–13 September 2019; pp. 334–341. [Google Scholar]
- Glorot, X.; Bordes, A.; Bengio, Y. Deep Sparse Rectifier Neural Networks. In Proceedings of the Fourteenth International Conference on Artificial Intelligence and Statistics, Ft. Lauderdale, FL, USA, 11–13 April 2011; pp. 315–323. [Google Scholar]
- Carneiro, T.; Da Nóbrega, R.V.M.; Nepomuceno, T.; Bian, G.B.; De Albuquerque, V.H.C. Performance Analysis of Google Colaboratory as a Tool for Accelerating Deep Learning Applications. IEEE Access 2018, 6, 61677–61685. [Google Scholar] [CrossRef]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. TensorFlow: A system for Large-Scale machine learning. In Proceedings of the 12th USENIX Symposium on Operating Systems Design and Implementation (OSDI 16), Savannah, GA, USA, 2–4 November 2016; pp. 265–283. [Google Scholar]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Distributed Systems. arXiv 2016, arXiv:1603.04467. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Month/ Year | Study | DL Model | EMG Feature | Application | Conclusion |
|---|---|---|---|---|---|---|
| 1 | June/2019 | [14] | Improved dual parallel channels convolutional neural network (IDPC-CNN). | Spectral features of sEMG | Fall detection using sEMG | IDPC-CNN was significantly better than other applied methods |
| 2 | May/2019 | [15] | CNN | Spectrogram images | Pattern recognition | CNN classification accuracy of 88.04% |
| 3 | August/2018 | [16] | Regression CNN | Raw EMG signal | Simultaneous EMG control | CNN-based system outperformed SVM-based system |
| 4 | August/2018 | [16] | Compact CNN | Raw EMG signal | Gesture classification | CNN outperformed SVM |
| 5 | January/2019 | [17] | CNN + transfer learning | Raw EMG, spectrograms, and continuous wavelet transform (CWT) | Gesture classification | Transfer learning enhanced the performance of the CWT-based CNN |
| 6 | October/2017 | [18] | CNN | sEMG | Gesture recognition | CNN achieved an average accuracy of 97.81% |
| 7 | July/2017 | [19] | CNN | sEMG | Pattern recognition | CNN showed a better performance compared to SVM |
| 8 | February/2017 | [20] | CNN | sEMG images | Hand gesture recognition | CNN was better than LDA, SVM, kNN, and RF (state-of-the-art methods) |
| 9 | November/2016 | [21] | CNN | sEMG images | Gesture recognition | CNN was better than LDA, SVM, kNN, MLP and RF |
| 10 | October/2016 | [22] | CNN | sEMG spectrograms | Robotic arm guidance | CNN achieved state-of-the-art results |
| 11 | September/2016 | [23] | CNN | Raw sEMG | Pattern recognition | CNN produced accurate results with a simple architecture, compared to the classical methods |
| No | Architecture Parameters | Output Shape | No. of Parameters |
|---|---|---|---|
| 1 | CONV1: 32 × (5,1), stride: (2) | 500 × 32 | 192 |
| 2 | Maxpool1: (2,1), stride: (2) | 250 × 32 | 0 |
| 3 | CONV2: 32 × (5,1), stride: (2) | 125 × 32 | 5152 |
| 4 | Maxpool2: (2,1), stride: (2) | 63 × 32 | 0 |
| 5 | CONV3: 64 × (3,1), stride: (1) | 63 × 64 | 6208 |
| 6 | Maxpool3: (2,1), stride: (2) | 32 × 64 | 0 |
| 7 | Dropout3: (0.1) | 32 × 64 | 0 |
| 8 | CONV4: 128 × (3,1), stride: (1) | 32 × 128 | 24,704 |
| 9 | Maxpool4: (2,1), stride: (2) | 16 × 128 | 0 |
| 10 | Dropout4: (0.1) | 16 × 128 | 0 |
| 11 | Global Average Pooling | 128 | 0 |
| 12 | FC: 100 (ReLU) | 100 | 12,900 |
| 13 | Output: 1 (Sigmoid) | 1 | 101 |
| Total No. of Parameters | 49,257 | ||
| Optimizer | Learning Rate | Batch Size | Epoch | Loss Function |
|---|---|---|---|---|
| Adam | 0.001 | 128 | 500 | BC |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masood, F.; Sharma, M.; Mand, D.; Nesathurai, S.; Simmons, H.A.; Brunner, K.; Schalk, D.R.; Sledge, J.B.; Abdullah, H.A. A Novel Application of Deep Learning (Convolutional Neural Network) for Traumatic Spinal Cord Injury Classification Using Automatically Learned Features of EMG Signal. Sensors 2022, 22, 8455. https://doi.org/10.3390/s22218455
Masood F, Sharma M, Mand D, Nesathurai S, Simmons HA, Brunner K, Schalk DR, Sledge JB, Abdullah HA. A Novel Application of Deep Learning (Convolutional Neural Network) for Traumatic Spinal Cord Injury Classification Using Automatically Learned Features of EMG Signal. Sensors. 2022; 22(21):8455. https://doi.org/10.3390/s22218455
Chicago/Turabian StyleMasood, Farah, Milan Sharma, Davleen Mand, Shanker Nesathurai, Heather A. Simmons, Kevin Brunner, Dane R. Schalk, John B. Sledge, and Hussein A. Abdullah. 2022. "A Novel Application of Deep Learning (Convolutional Neural Network) for Traumatic Spinal Cord Injury Classification Using Automatically Learned Features of EMG Signal" Sensors 22, no. 21: 8455. https://doi.org/10.3390/s22218455
APA StyleMasood, F., Sharma, M., Mand, D., Nesathurai, S., Simmons, H. A., Brunner, K., Schalk, D. R., Sledge, J. B., & Abdullah, H. A. (2022). A Novel Application of Deep Learning (Convolutional Neural Network) for Traumatic Spinal Cord Injury Classification Using Automatically Learned Features of EMG Signal. Sensors, 22(21), 8455. https://doi.org/10.3390/s22218455