

Bifurcation Control on the Un-Linearizable Dynamic System via Washout Filters


Abstract
:1. Introduction
2. The Un-Linearizable System
2.1. Properties of the Linear System
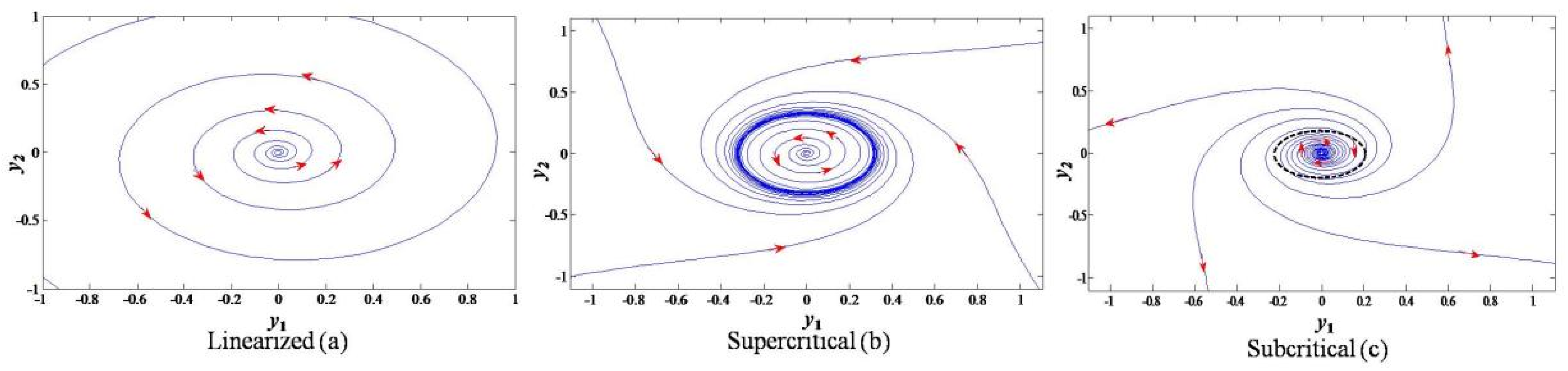
2.2. Normal Form Andronov–Hopf Bifurcation: A Typical Un-Linearizable System
3. Stabilizing Normal Form Andronov–Hopf Bifurcation
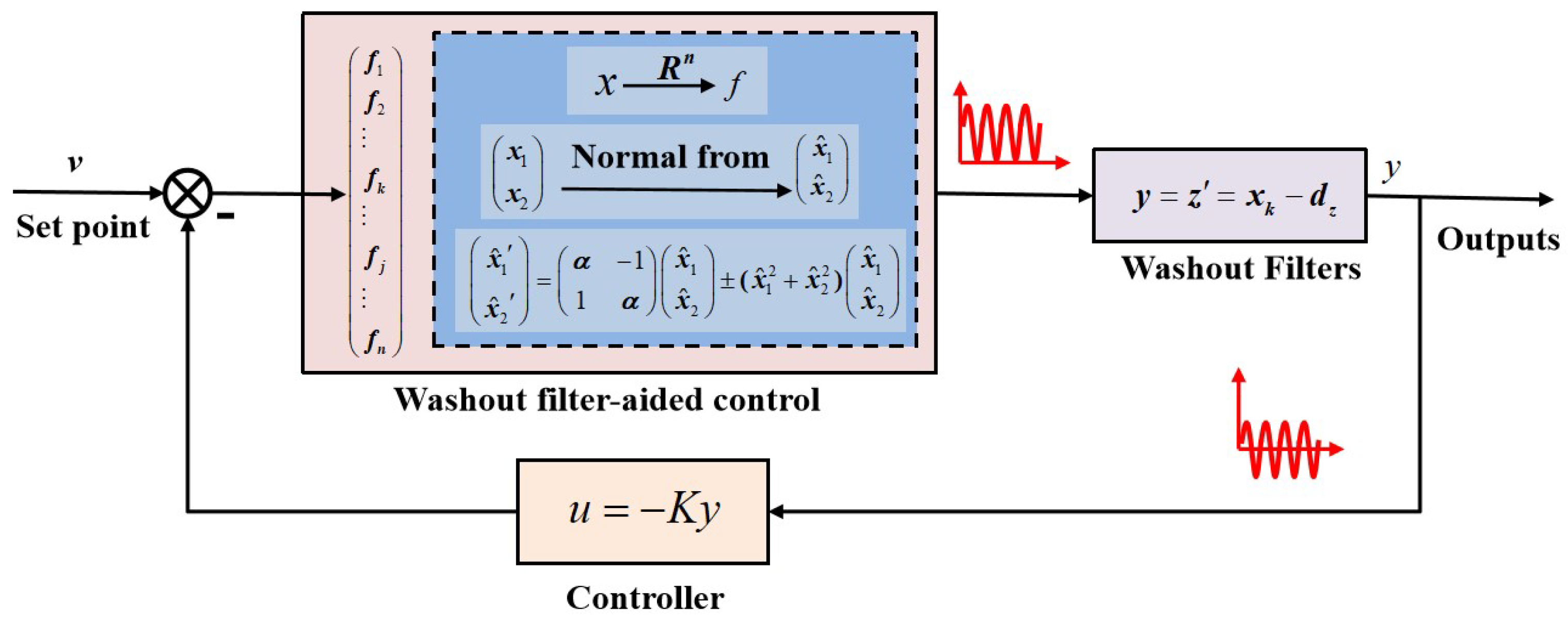
3.1. Washout Filter as a State Manipulator
3.2. Feedback Stabilization Based on the Linearized System
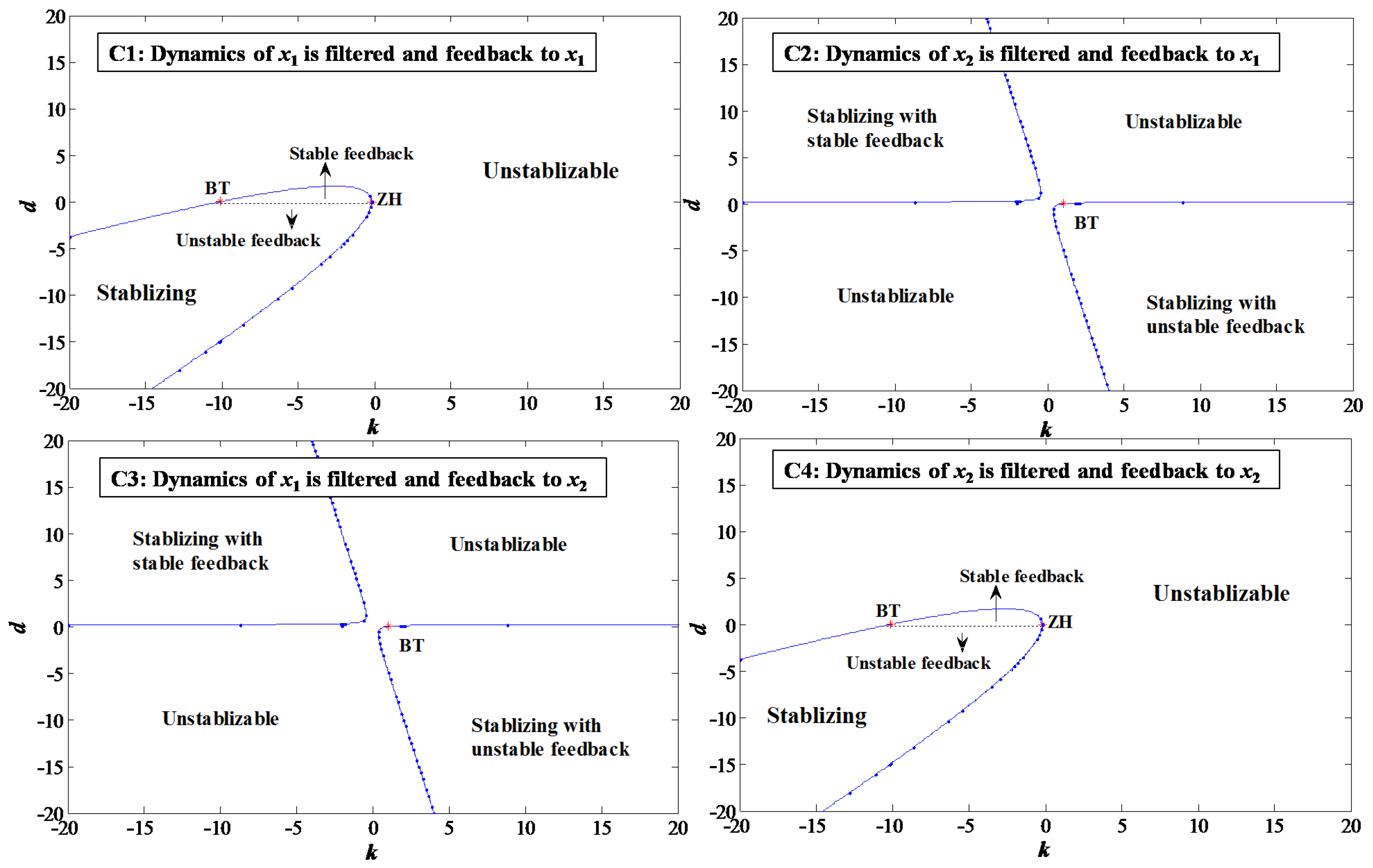
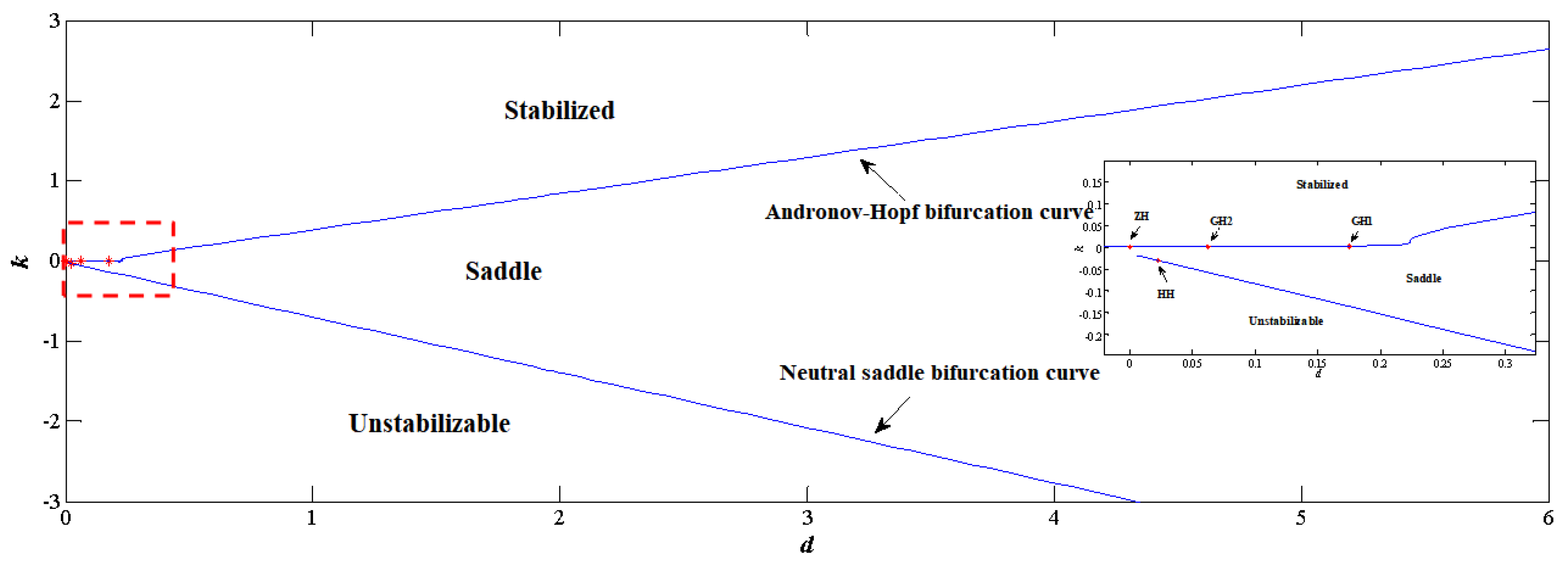
3.3. Bifurcation Analysis on the Closed-Loop System
4. Case Study
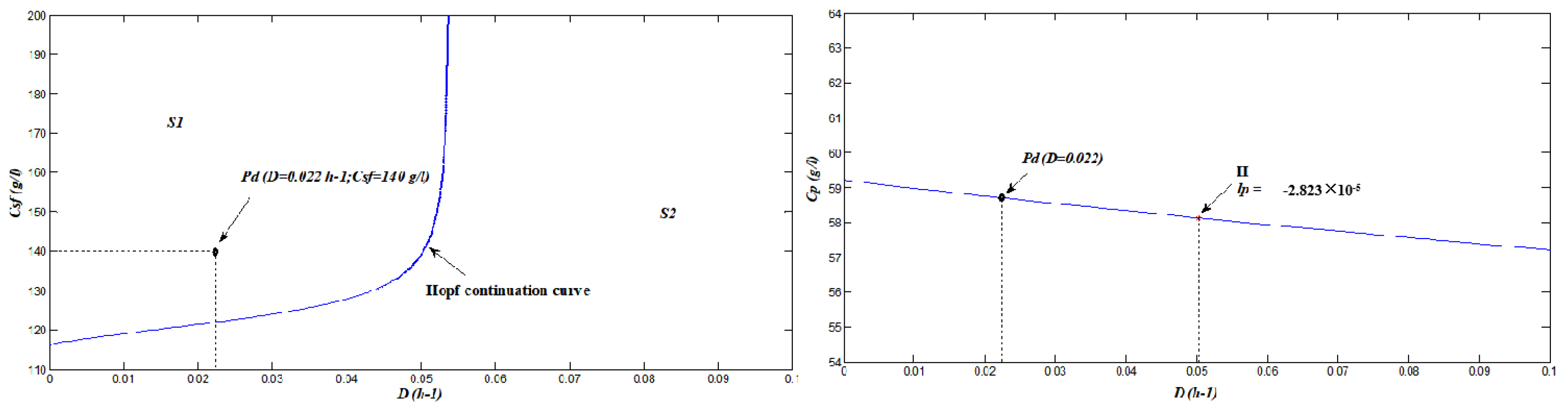
4.1. Bifurcation Analysis on the Continuous Ethanol Fermentation Model
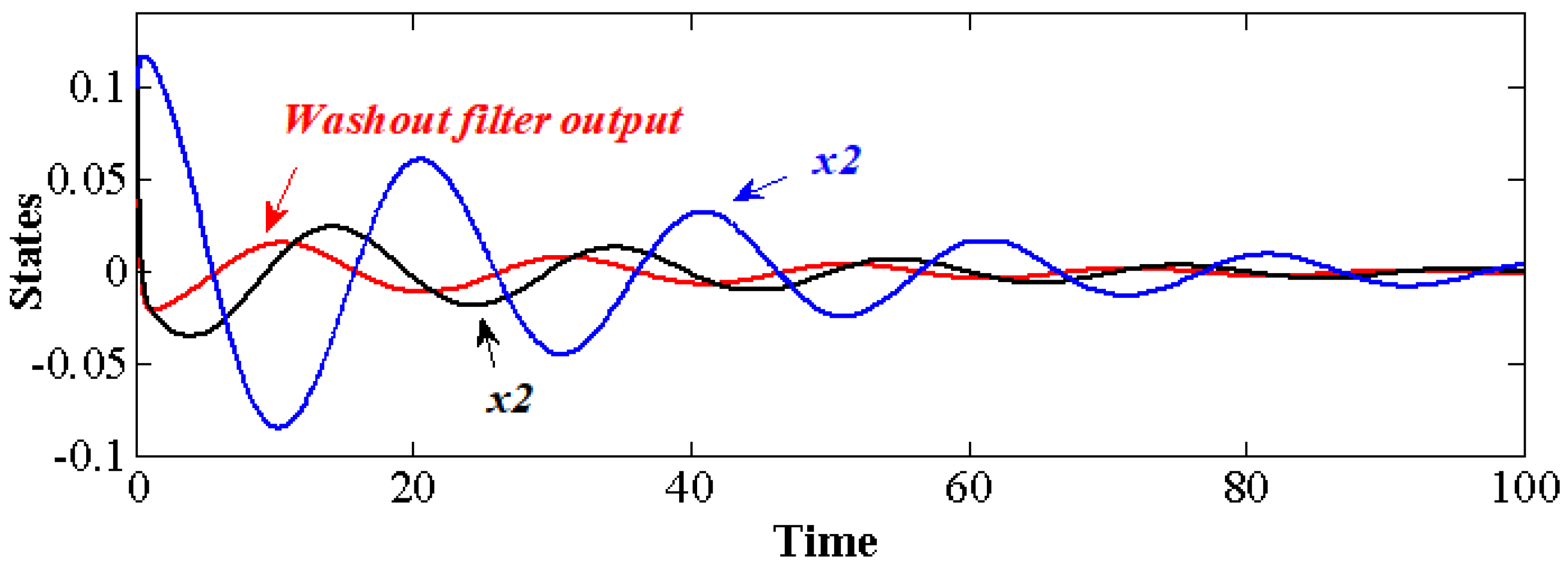
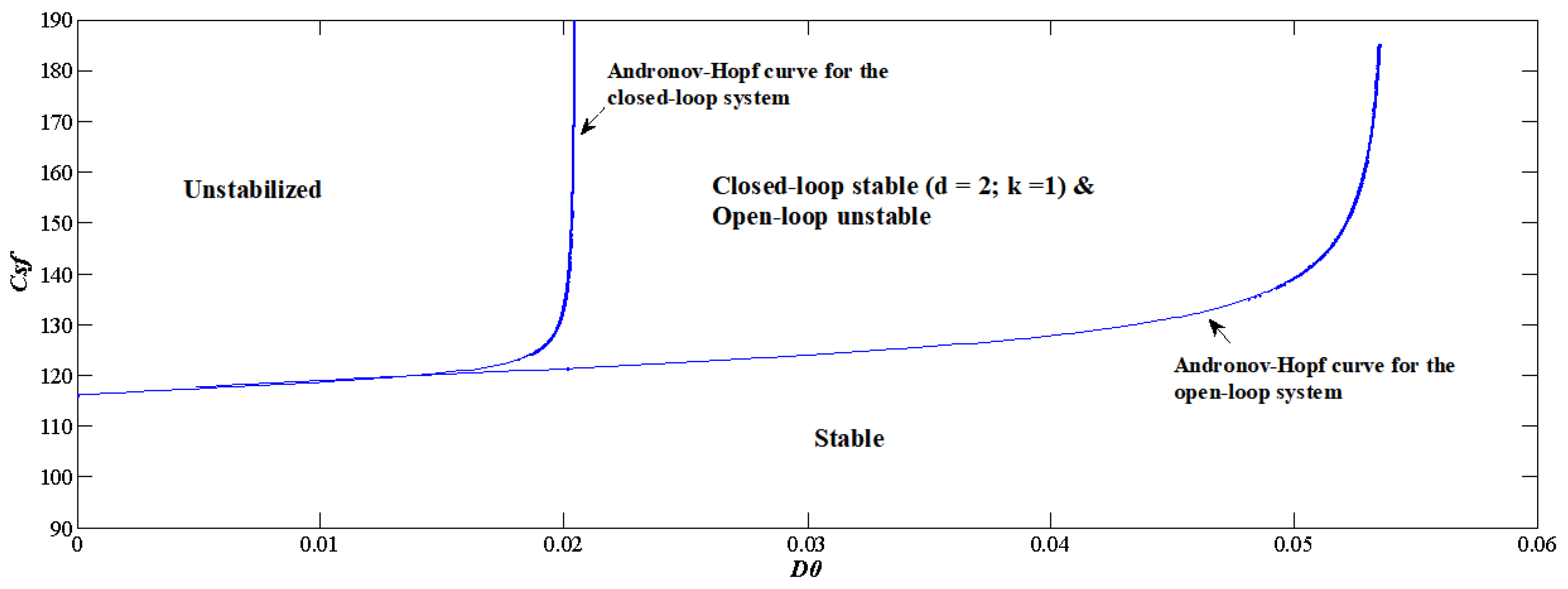
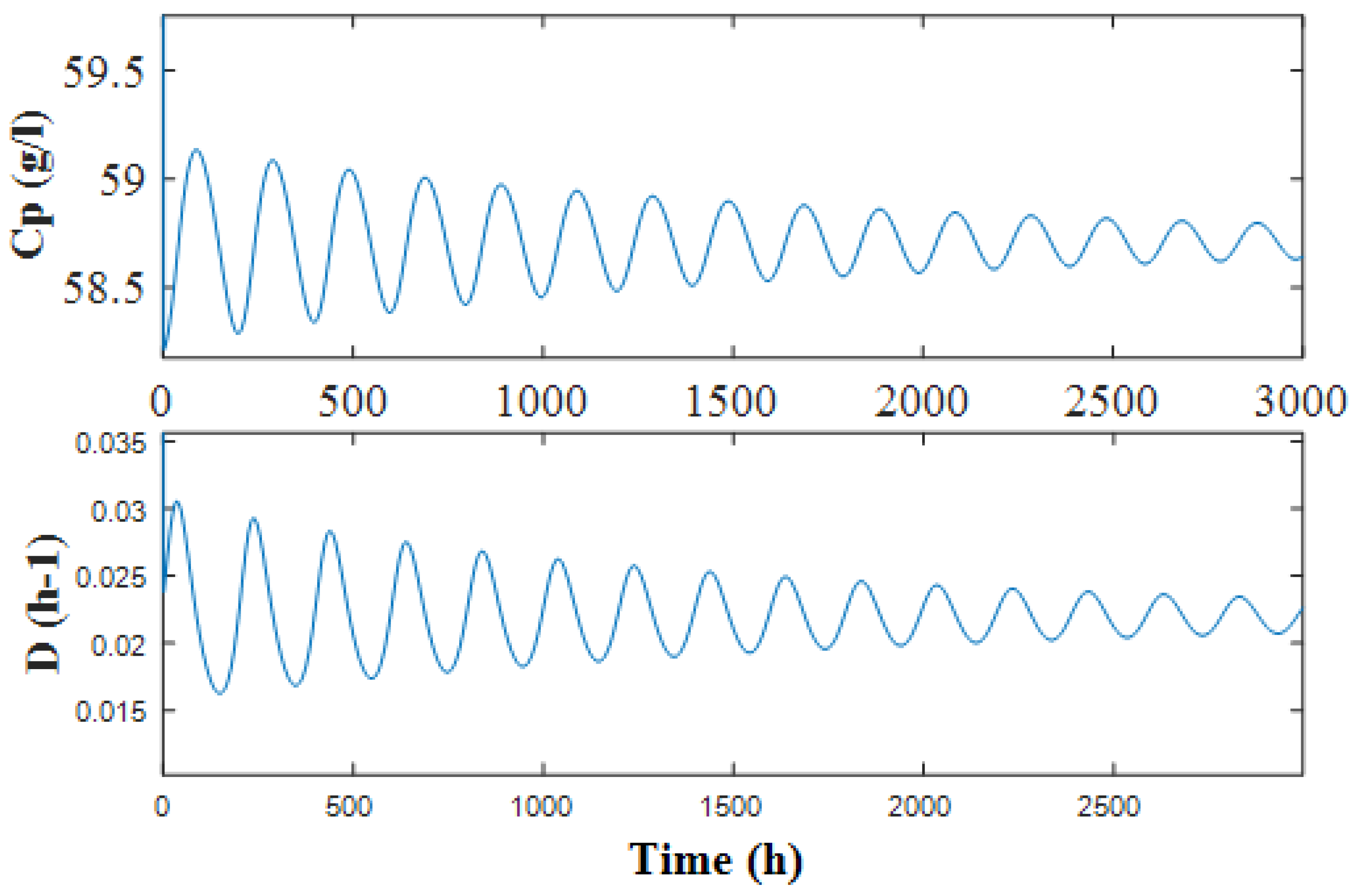
4.2. Washout-Filter-Aided Control of the Fermentation Model
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| D | dilution rate, h |
| saturation constant, g/L | |
| inhibition constant, L/g | |
| inherent period, h | |
| design point for unforced system | |
| growth rate of the K-compartment, g/L h | |
| substrate feed concentration, g/L | |
| t | time, h |
| x | biomass concentration, g/L |
| yield factor of biomass on substrate/product, g/g | |
| maintenance item, g/g h | |
| Greek letters | |
| Greek letters | |
| maximum specific growth rate, h | |
| Subscripts | |
| s | substrate |
| x | biomass |
| e | K-compartment |
| p | product |
Appendix A
References
- Wang, X.; Zhai, C.; Zhao, Z.; Palazoglu, A.; Sun, W.; Ai, J. Analysis of the Onset of Chaos for the Belousov-Zhabotinsky Reaction. Comput. Aided Chem. Eng. 2018, 44, 1375–1380. [Google Scholar]
- Pashin, D.; Bastrakova, M.; Satanin, A.; Klenov, N. Bifurcation Oscillator as an Advanced Sensor for Quantum State Control. Sensors 2022, 22, 6580. [Google Scholar] [CrossRef] [PubMed]
- Ambrożkiewicz, B.; Syta, A.; Georgiadis, A.; Gassner, A.; Meier, N. Experimental Verification of the Impact of Radial Internal Clearance on a Bearing’s Dynamics. Sensors 2022, 22, 6366. [Google Scholar] [CrossRef] [PubMed]
- Zhai, H.; Sands, T. Comparison of Deep Learning and Deterministic Algorithms for Control Modeling. Sensors 2022, 22, 6362. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.; Liu, Z.; Liao, M.; Li, P.; Xiao, Q.; Yuan, S. Fractional-order bidirectional associate memory (BAM) neural networks with multiple delays: The case of Hopf bifurcation. Math. Comput. Simul. 2021, 182, 471–494. [Google Scholar] [CrossRef]
- Yang, R.; Nie, C.; Jin, D. Spatiotemporal dynamics induced by nonlocal competition in a diffusive predator-prey system with habitat complexity. Nonlinear Dyn. 2022, 110, 879–900. [Google Scholar] [CrossRef]
- Krishan, R.; Verma, A. Assessment and Enhancement of Hopf Bifurcation Stability Margin in Uncertain Power Systems. Electr. Power Syst. Res. 2022, 206, 107783. [Google Scholar] [CrossRef]
- Alfifi, H.Y. Stability and Hopf bifurcation analysis for the diffusive delay logistic population model with spatially heterogeneous environment. Appl. Math. Comput. 2021, 408, 126362. [Google Scholar] [CrossRef]
- Shi, J.; He, K.; Fang, H. Chaos, Hopf bifurcation and control of a fractional-order delay financial system. Math. Comput. Simul. 2022, 194, 348–364. [Google Scholar] [CrossRef]
- Fiedler, B.; Flunkert, V.; Georgi, M.; Hövel, P.; Schöll, E. Refuting the odd-number limitation of time-delayed feedback control. Phys. Rev. Lett. 2007, 98, 114101. [Google Scholar] [CrossRef] [Green Version]
- Zhai, C.; Sun, W. Analytical approximation of a self-oscillatory reaction system using the Laplace-Borel transform. Chaos Solitons Fractals 2021, 142, 110508. [Google Scholar] [CrossRef]
- Cheng, Z. Anti-control of Hopf bifurcation for Chen’s system through washout filters. Neurocomputing 2010, 73, 3139–3146. [Google Scholar] [CrossRef]
- Hassouneh, M.A.; Lee, H.C.; Abed, E.H. Washout filters in feedback control: Benefits, limitations and extensions. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; Volume 5, pp. 3950–3955. [Google Scholar]
- Kang, W. Bifurcation control via state feedback for systems with a single uncontrollable mode. SIAM J. Control Optim. 2000, 38, 1428–1452. [Google Scholar] [CrossRef]
- Krener, A.J.; Kang, W.; Chang, D.E. Control bifurcations. IEEE Trans. Autom. Control 2004, 49, 1231–1246. [Google Scholar] [CrossRef]
- Abed, E.H. A simple proof of stability on the center manifold for Hopf bifurcation. SIAM Rev. 1988, 30, 487–491. [Google Scholar] [CrossRef] [Green Version]
- Abed, E.H.; Fu, J.H. Local feedback stabilization and bifurcation control, I. Hopf bifurcation. Syst. Control Lett. 1986, 7, 11–17. [Google Scholar] [CrossRef] [Green Version]
- Abed, E.H.; Fu, J.H. Local feedback stabilization and bifurcation control, II. Stationary bifurcation. Syst. Control Lett. 1987, 8, 467–473. [Google Scholar] [CrossRef] [Green Version]
- Abed, E.H.; Wang, H.O.; Chen, R.C. Stabilization of period doubling bifurcations and implications for control of chaos. Phys. D Nonlinear Phenom. 1994, 8, 154–164. [Google Scholar] [CrossRef]
- Laiou, M.C.; Mönnigmann, M.; Marquardt, W. Stabilization of nonlinear systems by bifurcation placement. IFAC Proc. Vol. 2004, 37, 675–680. [Google Scholar] [CrossRef]
- Zhang, N.; Qiu, T.; Chen, B. Bifurcation control and eigenstructure assignment in continuous solution polymerization of vinyl acetate. Chin. J. Chem. Eng. 2015, 23, 1523–1529. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, N.; Qiu, T.; Zhao, J.; He, X.; Chen, B. Optimization of a continuous fermentation process producing 1,3-propane diol with Hopf singularity and unstable operating points as constraints. Chem. Eng. Sci. 2014, 116, 116. [Google Scholar] [CrossRef]
- Ding, L.; Hou, C. Stabilizing control of Hopf bifurcation in the Hodgkin-Huxley model via washout filter with linear control term. Nonlinear Dyn. 2010, 60, 131–139. [Google Scholar] [CrossRef]
- Suo, L.; Ren, J.; Zhao, Z.; Zhai, C. Study on the nonlinear dynamics of the continuous stirred tank reactors. Processes 2020, 8, 1436. [Google Scholar] [CrossRef]
- Hurwitz, A. On the conditions under which an equation hasonly roots with negative real parts. Math. Ann 1895, 46, 273–284. [Google Scholar] [CrossRef]
- Jobses, I.M.L.; Egberts, G.T.C.; Luyben, K.C.A.M.; Roels, J.A. Fermentation kinetics of Zymomonasmobilis at high ethanol concentrations: Oscillations in continuous cultures. Biotechnol. Bioeng. 1986, 28, 868–877. [Google Scholar] [CrossRef]
- Douglas, J.M.; Rippin, D.W.T. Unsteady state processoperation. Chem. Eng. Sci 1966, 21, 305–315. [Google Scholar] [CrossRef]
- Bailey, J.E. Periodic operation of chemical reactors: A review. Chem. Eng. Commun. 1974, 1, 111–124. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition | Value |
|---|---|---|
| Maximum specific biomass growth rate (h) | 1.0 | |
| Yield factor for substrate to biomass (g/g) | 0.00244498 | |
| Yield factor for substrate to product (g/g) | 0.00526315 | |
| Maintenance substrate consumption rate (g/g h) | 2.16 | |
| Monod constant (g/L) | 0.5 | |
| Empirical constant (h) | 16 | |
| Empirical constant (L/g h) | 0.497 | |
| Empirical constant (L/gh) | 0.000383 | |
| Maintenance product consumption rate (g/g h) | 1.1 | |
| Substrate feed concentration (g/L) | 140 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhai, C.; Yang, C.; Na, J. Bifurcation Control on the Un-Linearizable Dynamic System via Washout Filters. Sensors 2022, 22, 9334. https://doi.org/10.3390/s22239334
Zhai C, Yang C, Na J. Bifurcation Control on the Un-Linearizable Dynamic System via Washout Filters. Sensors. 2022; 22(23):9334. https://doi.org/10.3390/s22239334
Chicago/Turabian StyleZhai, Chi, Chunxi Yang, and Jing Na. 2022. "Bifurcation Control on the Un-Linearizable Dynamic System via Washout Filters" Sensors 22, no. 23: 9334. https://doi.org/10.3390/s22239334
APA StyleZhai, C., Yang, C., & Na, J. (2022). Bifurcation Control on the Un-Linearizable Dynamic System via Washout Filters. Sensors, 22(23), 9334. https://doi.org/10.3390/s22239334