
Robust Beamforming Based on Covariance Matrix Reconstruction in FDA-MIMO Radar to Suppress Deceptive Jamming



Abstract
:1. Introduction
2. FDA-MIMO Radar Signal Model
2.1. Desired Signal Model
2.2. Jamming Signal Model
2.3. Receiving Signal Model
- If the desired target and jamming spatial angle differ, i.e., , then they can be distinguished directly in FDA-MIMO radar by employing the receive spatial frequency dimension.
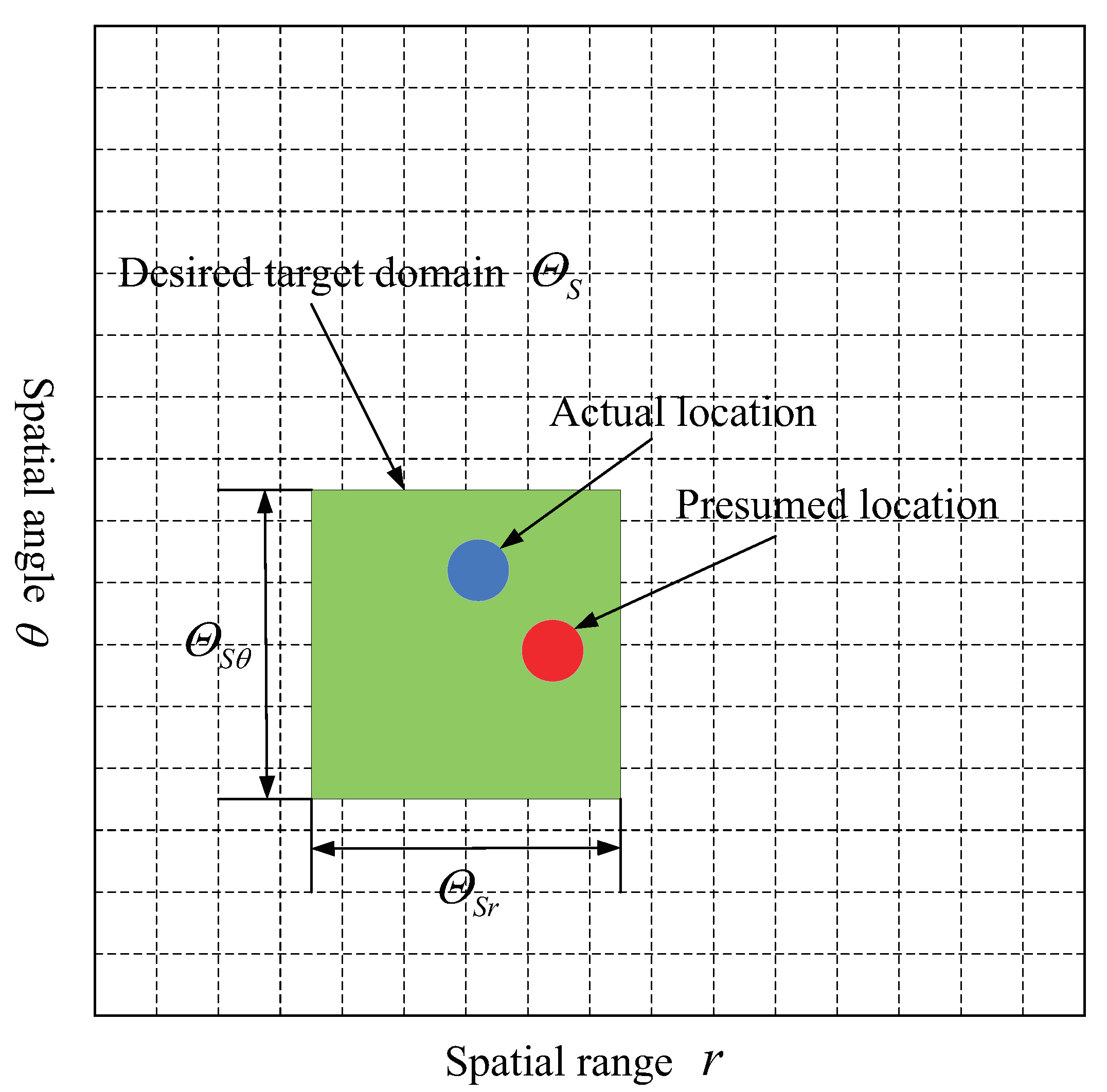
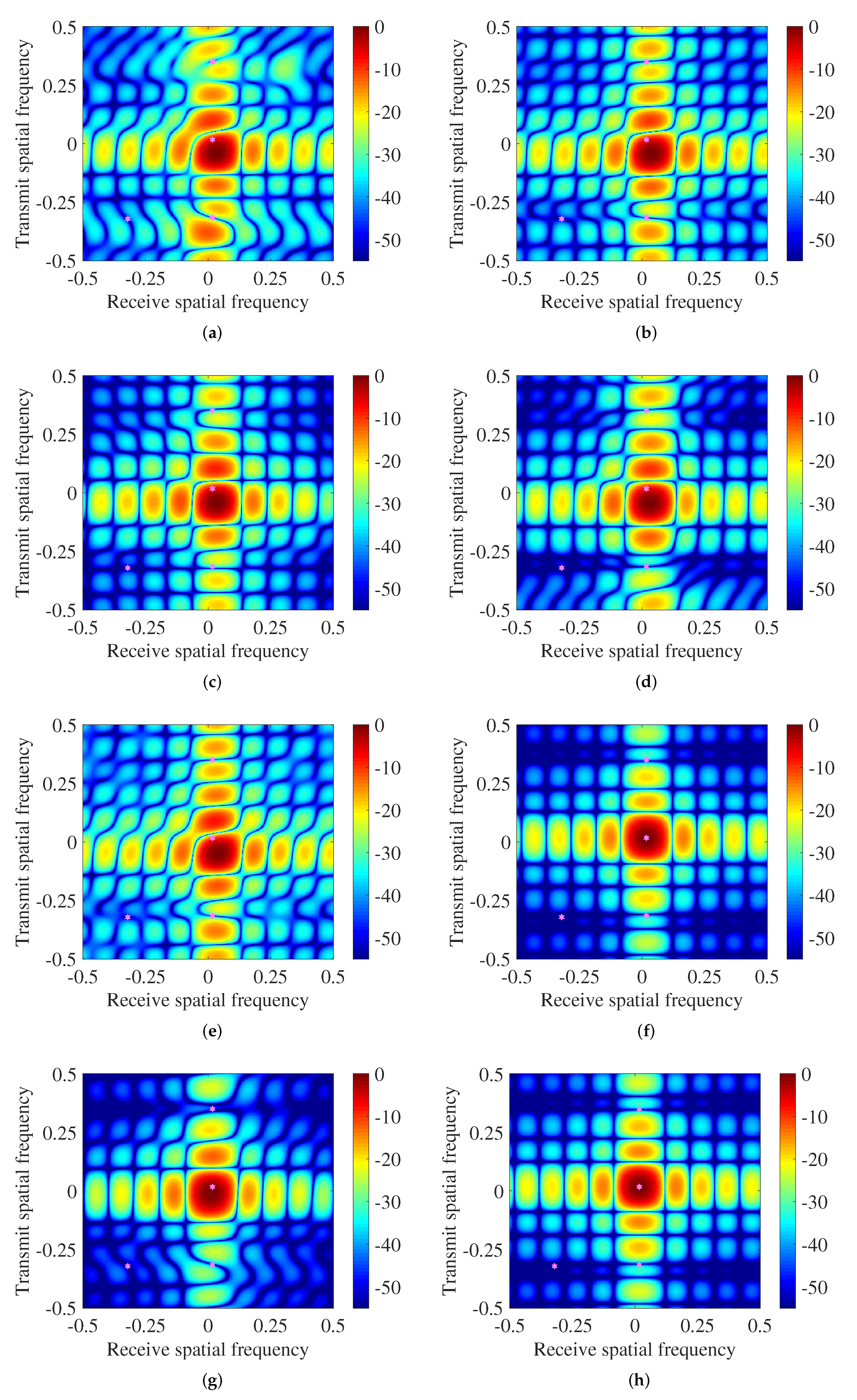
- If the angle between the desired target and jamming is nearly the same, that is , they cannot be divided by using the receive spatial frequency. Nevertheless, the principal range of the desired target is , whereas jamming is generated by the FTG via time delay modulation and has an equivalent range of . As a result, they differ in range dimension. It is considered to discern between the desired target and jamming in the transmit–receive frequency domain. Figure 2 illustrates the power spectrum distribution diagram of the desired target and jamming in the transmit-receive frequency domain of the FDA-MIMO radar.
3. Robust Decepticve Jamming Suppression
3.1. Background
3.2. Proposed Method
- Step 1: Residual noise analysis and desired signal SV estimation
- Step 2: Jamming SV estimation
- Step 3: Jamming power estimation and IPNCM reconstruction
| Algorithm 1: Proposed RAB Algorithm. |
|
- The complexity of the target SV estimation can be divided into two componets. The first is to constructe target covariance matrix at the cost of . The second is to decompose the target covariance matrix costing . Therefore, the complexity of solving the target SV estimation is .
- The complexity of the jamming SVs estimation includes three parts. First, it has a complexity of to eigendecomposition of the SCM to obtain . Second, it has complexity of through reconstructing the k-th jamming covariance matrix and eigen-decomposing to obtain as same as step (1). Third, the complexity of eigen-decomposing to calculate the k-th jamming SV is . Suppose that the discrete sampling points of each jamming domain are equal to , i.e., , the complexity of estimating all K jamming SVs is .
- The complexity of computing is owing to matrix inversion of . Therefore, the overall complexity of the proposed method is roughly .
4. Simulation Results
4.1. Transmit-Receive Beampattern Comparison
4.2. Beam Pattern Comparison
4.3. Beamformer Output Results
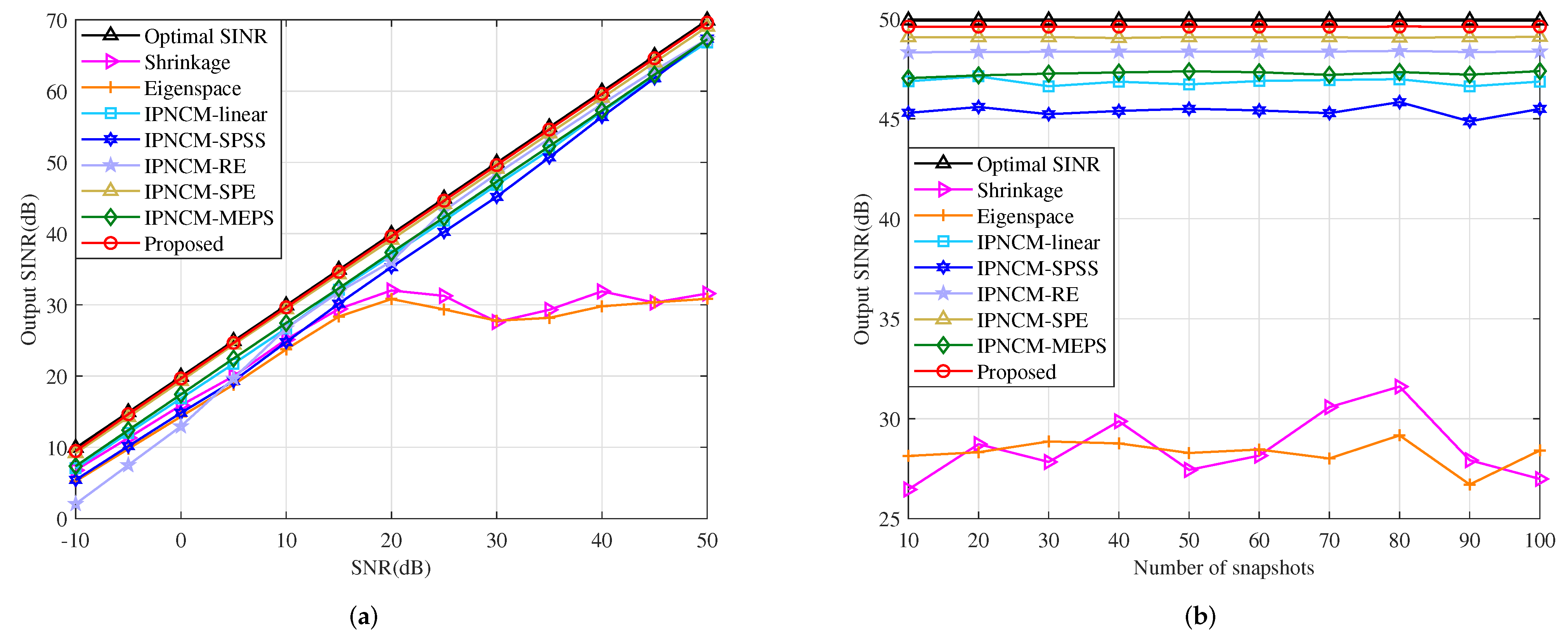
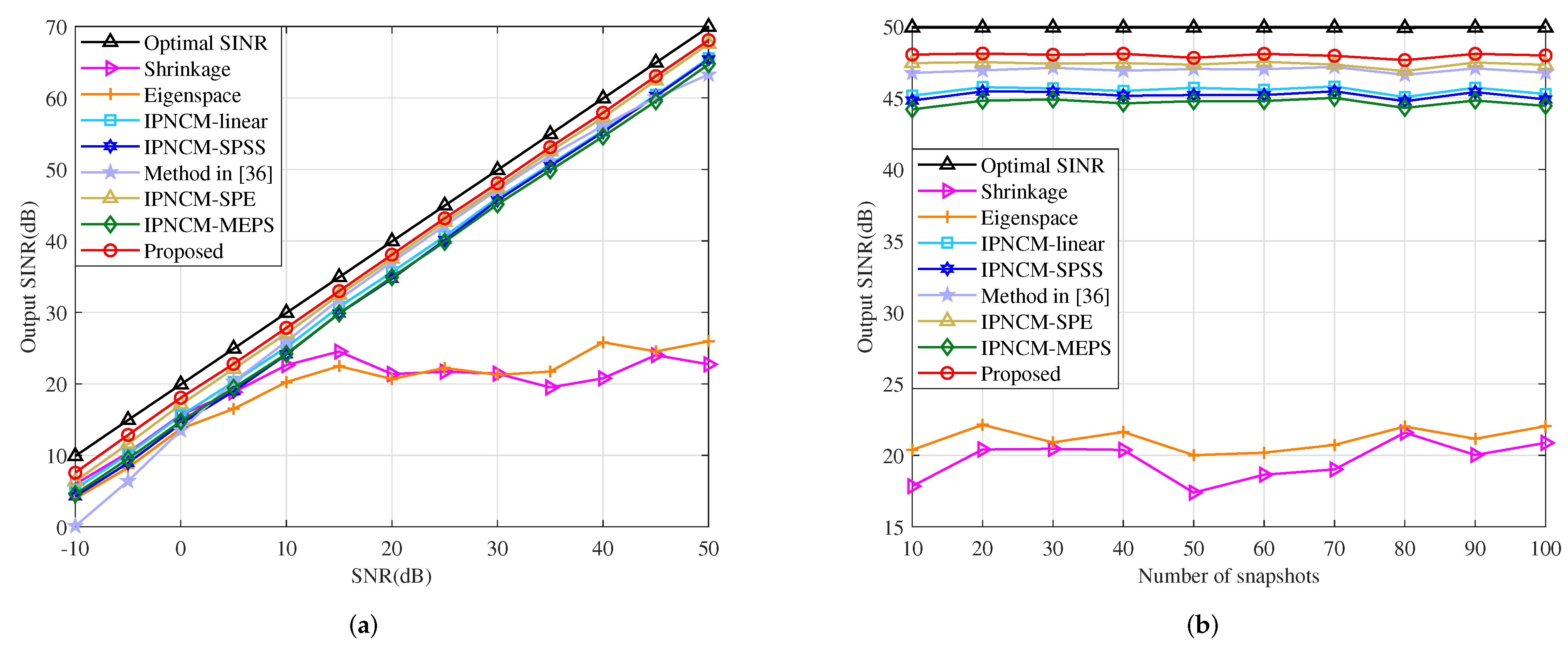
4.4. Output SINR Performance
4.4.1. Effect of Residual Noise on Output SINR
4.4.2. Mismatch Due to Signal Look Direction and Range Error
4.4.3. Mismatch Due to Array Geometry Error
4.4.4. Mismatch Due to Channel Gain and Phase Error
4.4.5. Mismatch Due to Incoherent Local Scattering
4.4.6. Mismatch Due to Coherent Local Scattering
4.4.7. Mismatch Due to SV Random Error
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tan, M.; Wang, C.; Xue, B.; Xu, J. A novel deceptive jamming approach against frequency diverse array radar. IEEE Sens. J. 2021, 21, 8323–8332. [Google Scholar] [CrossRef]
- Zhang, S.; Zhou, Y.; Zhang, L.; Zhang, Q.; Du, L. Target Detection for Multistatic Radar in the Presence of Deception Jamming. IEEE Sens. J. 2021, 21, 8130–8141. [Google Scholar] [CrossRef]
- Zhou, C.; Liu, Q.; Chen, X. Parameter estimation and suppression for DRFM-based interrupted sampling repeater jammer. IEEE Sens. J. 2018, 12, 56–63. [Google Scholar] [CrossRef]
- Lan, L.; Liao, G.; Xu, J.; Zhang, Y.; Zhu, S. Mainlobe deceptive jammer suppression using element-pulse coding with MIMO radar. Signal Process. 2021, 182, 1–4. [Google Scholar] [CrossRef]
- Lan, L.; Liao, G.; Xu, J.; Zhang, Y.; Liao, B. Transceive beamforming with accurate nulling in FDA-MIMO radar for imaging. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4145–4159. [Google Scholar] [CrossRef]
- Xu, J.; Liao, G.; Zhu, S.; So, H.C. Deceptive jamming suppression with frequency diverse MIMO radar. Signal Process. 2015, 113, 9–17. [Google Scholar] [CrossRef]
- Li, S.; Zhang, L.; Liu, N.; Zhang, J.; Zhao, S. Adaptive detection with conic rejection to suppress deceptive jamming for frequency diverse MIMO radar. Digit Signal Process. 2017, 69, 32–40. [Google Scholar] [CrossRef]
- Lan, L.; Liao, G.; Xu, J.; Zhang, Y.; Fioranelli, F. Suppression approach to main-beam deceptive jamming in FDA-MIMO radar using nonhomogeneous sample detection. Digit Signal Process. 2018, 6, 34582–34597. [Google Scholar] [CrossRef]
- Xu, J.; Kang, J.; Liao, G.; So, H.C. Mainlobe deceptive jammer suppression with FDA-MIMO radar. In Proceedings of the 2018 IEEE 10th Sensor Array and Multichannel Signal Processing Workshop (SAM), Sheffield, UK, 8–11 July 2018; pp. 504–508. [Google Scholar]
- Liu, Q.; Xu, J.; Ding, Z.; So, H.C. Target localization with jammer removal using frequency diverse array. IEEE Trans. Veh. Technol. 2020, 69, 11685–11696. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, S. Main-beam range deceptive jamming suppression with simulated annealing FDA-MIMO radar. IEEE Sens. J. 2020, 20, 9056–9070. [Google Scholar] [CrossRef]
- Lan, L.; Xu, J.; Liao, G.; Zhang, Y.; Fioranelli, F.; So, H.C. Suppression of mainbeam deceptive jammer with FDA-MIMO radar. IEEE Trans. Veh. Technol. 2020, 69, 11584–11598. [Google Scholar] [CrossRef]
- Ge, J.; Xie, J.; Wang, B. A cognitive active anti-jamming method based on frequency diverse array radar phase center. Digit Signal Process. 2021, 109, 1–18. [Google Scholar] [CrossRef]
- Zhang, X.; He, Z.; Liao, B.; Zhang, X.; Peng, W. Robust quasi-adaptive beamforming against direction-of-arrival mismatch. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1197–1207. [Google Scholar] [CrossRef]
- Chen, P.; Yang, Y.; Wang, Y.; Ma, Y. Robust adaptive beamforming with sensor position errors using weighted subspace fitting-based covariance matrix reconstruction. Sensors 2018, 18, 1476. [Google Scholar] [CrossRef] [Green Version]
- Yao, D.; Zhang, X.; Hu, B.; Yang, Q.; Wu, X. Robust Adaptive Beamforming with Optimal Covariance Matrix Estimation in the Presence of Gain-Phase Errors. Sensors 2020, 20, 2930. [Google Scholar] [CrossRef]
- Zhuang, J.; Xue, Y.; Kang, J.; Chen, D.; Wan, Q. Robust adaptive beamforming under data dependent constraints. Signal Process. 2021, 188, 108202. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P.; Wang, Z. On robust Capon beamforming and diagonal loading. IEEE Trans. Aerosp. Electron. Syst. 2003, 51, 1702–1715. [Google Scholar]
- Elnashar, A.; Elnoubi, S.M.; El-Mikati, H.A. Further study on robust adaptive beamforming with optimum diagonal loading. IEEE Trans. Aerosp. Electron. Syst. 2006, 54, 3647–3658. [Google Scholar] [CrossRef]
- Yang, J.; Ma, X.; Hou, C.; Liu, Y. Automatic generalized loading for robust adaptive beamforming. IEEE Signal Process. Lett. 2009, 16, 219–222. [Google Scholar] [CrossRef]
- Du, L.; Li, J.; Stoica, P. Fully automatic computation of diagonal loading levels for robust adaptive beamforming. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 449–458. [Google Scholar] [CrossRef]
- Huang, F.; Sheng, W.; Ma, X. Modified projection approach for robust adaptive array beamforming. IEEE Trans. Aerosp. Electron. Syst. 2012, 92, 1758–1763. [Google Scholar] [CrossRef]
- Zhou, M.; Ma, X.; Shen, P.; Sheng, W. Weighted subspace-constrained adaptive beamforming for sidelobe control. IEEE Commun. Lett. 2019, 23, 458–461. [Google Scholar] [CrossRef]
- Jia, W.; Jin, W.; Zhou, S.; Yao, M. Robust adaptive beamforming based on a new steering vector estimation algorithm. Signal Process. 2013, 93, 2539–2542. [Google Scholar] [CrossRef]
- Vorobyov, S.A.; Gershman, A.B.; Luo, Z.Q. Robust adaptive beamforming using worst-case performance optimization: A solution to the signal mismatch problem. IEEE Trans. Signal Process. 2003, 93, 313–324. [Google Scholar] [CrossRef] [Green Version]
- Liao, B.; Guo, C.; Huang, L.; Li, Q.; So, H.C. Robust adaptive beamforming with precise main beam control. IEEE Trans. Aerosp. Electron. Syst. 2003, 53, 345–356. [Google Scholar] [CrossRef]
- Zhuang, J.; Shi, B.; Zuo, X.; Ali, A.H. Robust adaptive beamforming with minimum sensitivity to correlated random errors. Signal Process. 2003, 131, 92–98. [Google Scholar] [CrossRef]
- Beck, A.; Eldar, Y.C. Doubly constrained robust Capon beamformer with ellipsoidal uncertainty sets. IEEE Trans. Signal Process. 2007, 55, 753–758. [Google Scholar] [CrossRef] [Green Version]
- Vorobyov, S.A.; Chen, H.; Gershman, A.B. On the relationship between robust minimum variance beamformers with probabilistic and worst-case distortionless response constraints. IEEE Trans. Signal Process. 2008, 56, 5719–5724. [Google Scholar] [CrossRef]
- Jiang, X.; Zeng, W.J.; Yasotharan, A.; So, H.C. Robust beamforming by linear programming. IEEE Trans. Signal Process. 2014, 62, 1834–1849. [Google Scholar] [CrossRef]
- Gu, Y.; Leshem, A. Robust adaptive beamforming based on interference covariance matrix reconstruction and steering vector estimation. IEEE Trans. Signal Process. 2012, 60, 3881–3885. [Google Scholar]
- Lu, Z.; Li, Y.; Gao, M.; Zhang, Y. Interference covariance matrix reconstruction via steering vectors estimation for robust adaptive beamforming. Electron. Lett. 2013, 49, 1373–1374. [Google Scholar] [CrossRef]
- Huang, L.; Zhang, J.; Xu, X.; Ye, Z. Robust adaptive beamforming with a novel interference-plus-noise covariance matrix reconstruction method. Electron. Lett. 2015, 63, 1643–1650. [Google Scholar] [CrossRef]
- Shen, F.; Chen, F.; Song, J. Robust adaptive beamforming based on steering vector estimation and covariance matrix reconstruction. IEEE Commun. Lett. 2015, 19, 1636–1639. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, W.; Leng, W.; Wang, A.; Shi, H. Interference-plus-noise covariance matrix reconstruction via spatial power spectrum sampling for robust adaptive beamforming. IEEE Signal Process Lett. 2016, 23, 121–125. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Li, Y.; Gao, M. Robust adaptive beamforming based on the effectiveness of reconstruction. Signal Process. 2016, 120, 572–579. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Du, R.; Wu, J.; Zhou, Q.; Zhang, Z.; Cheng, Y. Multiple Constrained l2-Norm Minimization Algorithm for Adaptive Beamforming. IEEE Signal Process Lett. 2016, 23, 121–125. [Google Scholar]
- Zheng, Z.; Yang, T.; Wang, W.Q.; So, H.C. Robust adaptive beamforming via simplified interference power estimation. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3139–3152. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, W.Q.; So, H.C.; Liao, Y. Robust adaptive beamforming using a novel signal power estimation algorithm. Digit Signal Process. 2019, 95, 1–11. [Google Scholar] [CrossRef]
- Mohammadzadeh, S.; Nascimento, V.H.; de Lamare, R.C.; Kukrer, O. Maximum entropy-based interference-plus-noise covariance matrix reconstruction for robust adaptive beamforming. IEEE Trans. Aerosp. Electron. Syst. 2020, 27, 845–849. [Google Scholar] [CrossRef]
- Zhang, P.; Yang, Z.; Liao, G.; Jing, G.; Ma, T. An RCB-Like Steering Vector Estimation Method Based on Interference Matrix Reduction. IEEE Trans. Aerosp. Electron Syst. 2021, 57, 636–646. [Google Scholar] [CrossRef]
- Zhuang, J.; Manikas, A. Interference cancellation beamforming robust to pointing errors. IET Signal Process. 2013, 7, 120–127. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Zhang, Q. Eigenvalue inequalities for matrix product. IEEE Trans. Automat. Contr. 2006, 51, 1506–1509. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.2. 2020. Available online: http://cvxr.com/cvx (accessed on 8 January 2021).
- Besson, O.; Stoica, P. Decoupled estimation of DOA and angular spread for a spatially distributed source. IEEE Trans. Signal Process. 2000, 48, 1872–1882. [Google Scholar] [CrossRef]
- Gershman, A.B. Robust adaptive beamforming in sensor arrays. Int. J. Electron. Commun. 1999, 53, 305–314. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| M | 10 | N | 10 |
| Element spacing | 0.15 m | Carrier frequency | 1 GHz |
| Frequency increment | 5 kHz | PRF | 4 kHz |
| Bandwidth | 1 MHz | Number of pulses | 200 |
| Parameter | Desired Target | Jamming 1 | Jamming 2 | Jamming 3 |
|---|---|---|---|---|
| SNR/INR | 15 dB | 30 dB | 30 dB | 30 dB |
| Real range | 30 km | 40 km | 50 km | 60 km |
| Real angle | ||||
| Presumed range | 32 km | 42 km | 52 km | 62 km |
| Presumed angle |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, F.; Xu, J.; Zhang, Z. Robust Beamforming Based on Covariance Matrix Reconstruction in FDA-MIMO Radar to Suppress Deceptive Jamming. Sensors 2022, 22, 1479. https://doi.org/10.3390/s22041479
Wan F, Xu J, Zhang Z. Robust Beamforming Based on Covariance Matrix Reconstruction in FDA-MIMO Radar to Suppress Deceptive Jamming. Sensors. 2022; 22(4):1479. https://doi.org/10.3390/s22041479
Chicago/Turabian StyleWan, Fuhai, Jingwei Xu, and Zhenrong Zhang. 2022. "Robust Beamforming Based on Covariance Matrix Reconstruction in FDA-MIMO Radar to Suppress Deceptive Jamming" Sensors 22, no. 4: 1479. https://doi.org/10.3390/s22041479
APA StyleWan, F., Xu, J., & Zhang, Z. (2022). Robust Beamforming Based on Covariance Matrix Reconstruction in FDA-MIMO Radar to Suppress Deceptive Jamming. Sensors, 22(4), 1479. https://doi.org/10.3390/s22041479