
Modular Single-Stage Three-Phase Flyback Differential Inverter for Medium/High-Power Grid Integrated Applications

 ,
,  , and
, and
Abstract
:1. Introduction
2. Modular Flyback Differential Inverter
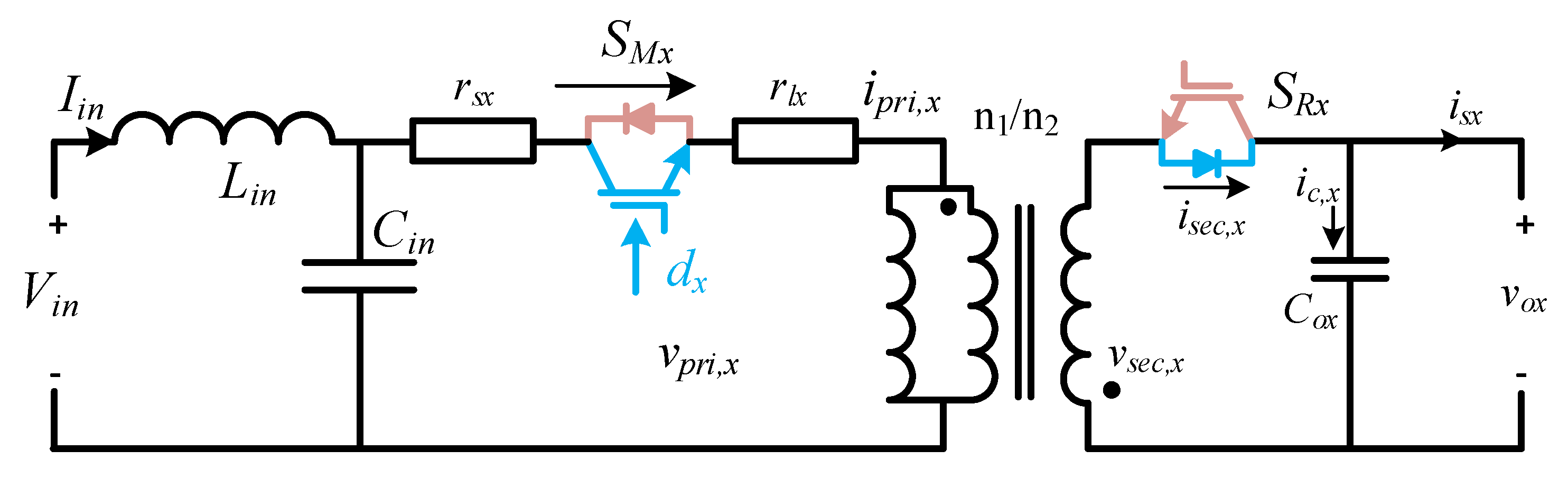
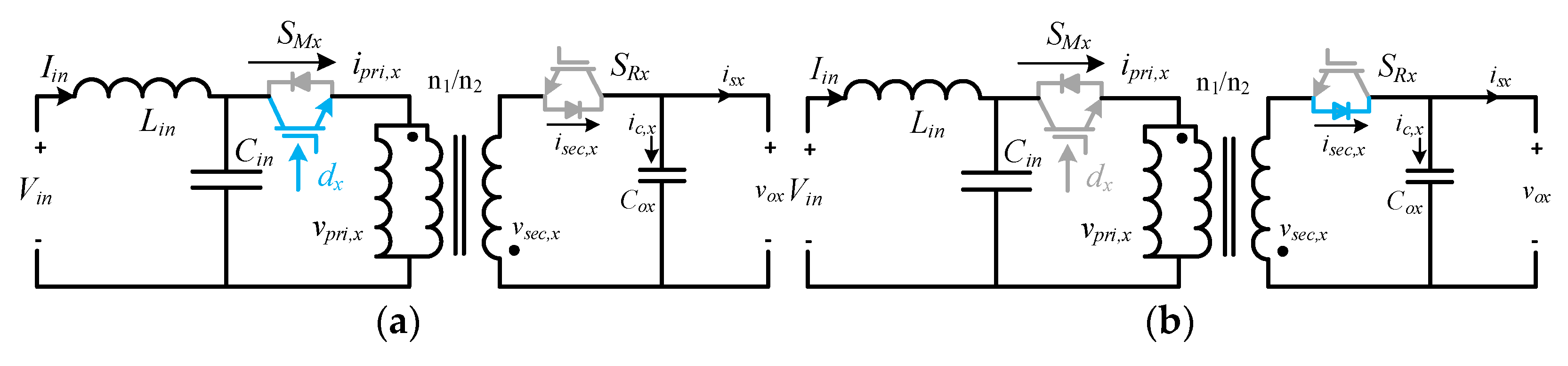
2.1. Single Flyback Module Operation
2.2. Mathematical Model of MFBDI
3. Converter Parameters Design and Selection
3.1. Passive Elements Design
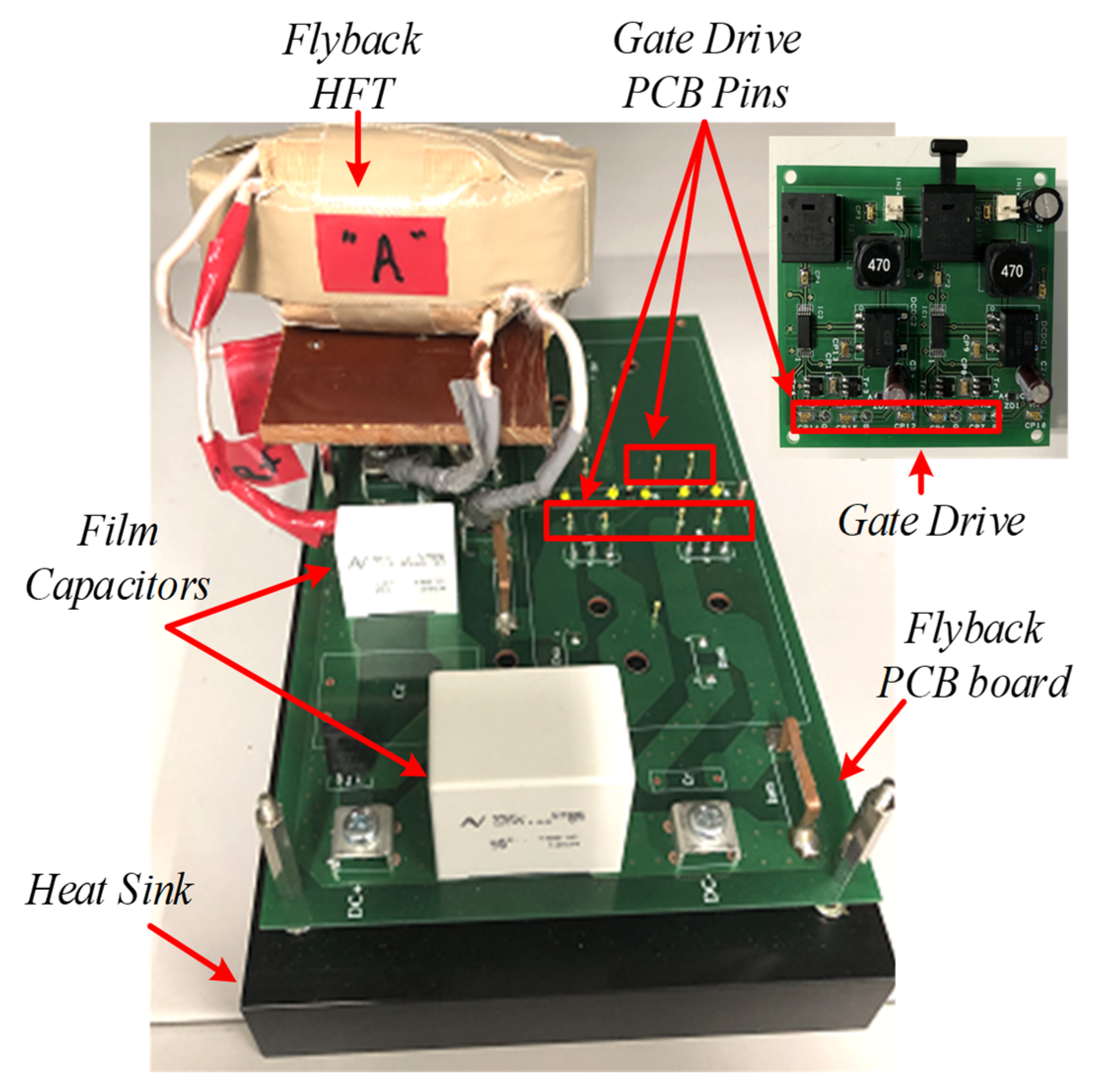
3.2. Hardware Implementation
3.3. Input LC Filter Design
4. MFBDI Control Scheme
5. System Verification
5.1. Simulation Results
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Carrasco, J.M.; Franquelo, L.G.; Bialasiewicz, J.T.; Galvan, E.; PortilloGuisado, R.; Prats, M.A.M.; Leon, J.I.; Moreno-Alfonso, N. Power-Electronic Systems for the Grid Integration of Renewable Energy Sources: A Survey. IEEE Trans. Ind. Electron. 2006, 53, 1002–1016. [Google Scholar] [CrossRef]
- Darwish, A.; Alotaibi, S.; Elgenedy, M.A. Current-Source Single-Phase Module Integrated Inverters for PV Grid-Connected Applications. IEEE Access 2020, 8, 53082–53096. [Google Scholar] [CrossRef]
- Ali, A.I.M.; Mohamed, H.R.A. Improved P&O MPPT algorithm with efficient open-circuit voltage estimation for two-stage grid-integrated PV system under realistic solar radiation. Int. J. Electr. Power Energy Syst. 2021, 137, 107805. [Google Scholar] [CrossRef]
- Lodh, T.; Pragallapati, N.; Agarwal, V. Novel Control Scheme for an Interleaved Flyback Converter Based Solar PV Microinverter to Achieve High Efficiency. IEEE Trans. Ind. Appl. 2018, 54, 3473–3482. [Google Scholar] [CrossRef]
- Bana, P.R.; Panda, K.P.; Naayagi, R.T.; Siano, P.; Panda, G. Recently Developed Reduced Switch Multilevel Inverter for Renewable Energy Integration and Drives Application: Topologies, Comprehensive Analysis and Comparative Evaluation. IEEE Access 2019, 7, 54888–54909. [Google Scholar] [CrossRef]
- Ali, A.I.M.; Sayed, M.A.; Takeshita, T. Isolated single-phase single-stage DC-AC cascaded transformer-based multilevel inverter for stand-alone and grid-tied applications. Int. J. Electr. Power Energy Syst. 2021, 125, 106534. [Google Scholar] [CrossRef]
- Taghvaie, A.; Haque, M.E.; Saha, S.; Mahmud, M.A. A new step-up switched-capacitor voltage balancing converter for NPC multilevel inverter-based solar PV system. IEEE Access 2020, 8, 83940–83952. [Google Scholar] [CrossRef]
- Ali, A.I.M.; Sayed, M.A.; Takeshita, T.; Hassan, A.M.M.; Azmy, A.M. A single-phase modular multilevel inverter based on controlled DC-cells under two SPWM techniques for renewable energy applications. Int. Trans. Electr. Energy Syst. 2020, 31, 12599. [Google Scholar] [CrossRef]
- Jain, S.; Agarwal, V. A Single-Stage Grid Connected Inverter Topology for Solar PV Systems with Maximum Power Point Tracking. IEEE Trans. Power Electron. 2007, 22, 1928–1940. [Google Scholar] [CrossRef] [Green Version]
- Liang, T.; Kuo, Y.; Chen, J. Single-stage photovoltaic energy conversion system. IEE Proc. Electr. Power Appl. 2001, 148, 339–344. [Google Scholar] [CrossRef]
- Gangavarapu, S.; Verma, M.; Rathore, A.K. A Novel Transformerless Single-Stage Grid-Connected Solar Inverter. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 1. [Google Scholar] [CrossRef]
- Ali, A.; Sayed, M.; Mohamed, A. Seven-Level Inverter with Reduced Switches for PV System Supporting Home-Grid and EV Charger. Energies 2021, 14, 2718. [Google Scholar] [CrossRef]
- Guo, B.; Su, M.; Sun, Y.; Wang, H.; Liu, B.; Zhang, X.; Pou, J.; Yang, Y.; Davari, P. Optimization Design and Control of Single-Stage Single-Phase PV Inverters for MPPT Improvement. IEEE Trans. Power Electron. 2020, 35, 13000–13016. [Google Scholar] [CrossRef]
- Pomilio, J.A.; Spiazzi, G. High-precision current source using low-loss, single-switch, three-phase AC/DC converter. IEEE Trans. Power Electron. 1996, 11, 561–566. [Google Scholar] [CrossRef]
- Bhuvaneswari, G.; Singh, B.; Singh, S. Three-phase single stage medium power supply using Cuk converter. In Proceedings of the 2012 IEEE 5th India International Conference on Power Electronics (IICPE), Delhi, India, 6–8 December 2012; pp. 1–6. [Google Scholar]
- Davoodnezhad, R.; Holmes, D.G.; McGrath, B.P. A Novel Three-Level Hysteresis Current Regulation Strategy for Three-Phase Three-Level Inverters. IEEE Trans. Power Electron. 2013, 29, 6100–6109. [Google Scholar] [CrossRef]
- Ahmed, T.A.; Mohamed, E.E.; Youssef, A.-R.; Ibrahim, A.; Saeed, M.S.; Ali, A.I. Three phase modular multilevel inverter-based multi-terminal asymmetrical DC inputs for renewable energy applications. Eng. Sci. Technol. Int. J. 2020, 23, 831–839. [Google Scholar] [CrossRef]
- Saleem, M.W.; Choi, K.-Y.; Kim, R.-Y. Resonance damping for an LCL filter type grid-connected inverter with active disturbance rejection control under grid impedance uncertainty. Int. J. Electr. Power Energy Syst. 2019, 109, 444–454. [Google Scholar] [CrossRef]
- Saleem, M.; Ko, B.-S.; Kim, S.-I.; Chowdhry, B.S.; Kim, R.-Y. Active Disturbance Rejection Control Scheme for Reducing Mutual Current and Harmonics in Multi-Parallel Grid-Connected Inverters. Energies 2019, 12, 4363. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; He, X.-F.; Liu, Y.-F. An Optimal Control Method for Photovoltaic Grid-Tied-Interleaved Flyback Microinverters to Achieve High Efficiency in Wide Load Range. IEEE Trans. Power Electron. 2013, 28, 5074–5087. [Google Scholar] [CrossRef]
- Kouro, S.; Leon, J.I.; Vinnikov, D.; Franquelo, L.G. Grid-Connected Photovoltaic Systems: An Overview of Recent Research and Emerging PV Converter Technology. IEEE Ind. Electron. Mag. 2015, 9, 47–61. [Google Scholar] [CrossRef]
- Tamyurek, B.; Kirimer, B. An Interleaved High-Power Flyback Inverter for Photovoltaic Applications. IEEE Trans. Power Electron. 2015, 30, 3228–3241. [Google Scholar] [CrossRef]
- Zapata, J.W.; Kouro, S.; Carrasco, G.; Renaudineau, H.; Meynard, T. Analysis of Partial Power DC–DC Converters for Two-Stage Photovoltaic Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 591–603. [Google Scholar] [CrossRef]
- Caceres, R.; Barbi, I. A boost DC-AC converter: Analysis, design, and experimentation. IEEE Trans. Power Electron. 1999, 14, 134–141. [Google Scholar] [CrossRef]
- Chen, D.; Wang, G. Differential Buck DC–DC Chopper Mode Inverters with High-Frequency Link. IEEE Trans. Power Electron. 2010, 26, 1444–1451. [Google Scholar] [CrossRef]
- Jang, M.; Ciobotaru, M.; Agelidis, V.G. A Single-Phase Grid-Connected Fuel Cell System Based on a Boost-Inverter. IEEE Trans. Power Electron. 2013, 28, 279–288. [Google Scholar] [CrossRef]
- Knight, J.; Shirsavar, S.; Holderbaum, W. An improved reliability cuk based solar inverter with sliding mode control. IEEE Trans. Power Electron. 2006, 21, 1107–1115. [Google Scholar] [CrossRef]
- Mazumder, S.K.; Mehrnami, S. A low-device-count single-stage direct-power-conversion solar microinverter for microgrid. In Proceedings of the 2012 3rd IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aalborg, Denmark, 25–28 June 2012; pp. 725–730. [Google Scholar]
- Kulkarni, A.; Gupta, A.; Mazumder, S.K. Resolving practical design issues in a single-phase grid-connected GaN-FET-based differential-mode inverter. IEEE Trans. Power Electron. 2017, 33, 3734–3751. [Google Scholar] [CrossRef]
- Darwish, A.; Holliday, D.; Ahmed, S.; Massoud, A.M.; Williams, B.W. A single-stage three-phase inverter based on Cuk converters for PV applications. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 797–807. [Google Scholar] [CrossRef]
- Darwish, A.; Elgenedy, M.A. Current-Source Modular Medium-Voltage Grid-Connected System with High-Frequency Isolation for Photovoltaic Applications. IEEE Trans. Energy Convers. 2018, 34, 255–266. [Google Scholar] [CrossRef] [Green Version]
- Diab, M.S.; Elserougi, A.; Massoud, A.M.; Abdel-Khalik, A.S.; Ahmed, S. A four-switch three-phase SEPIC-based inverter. IEEE Trans. Power Electron. 2014, 30, 4891–4905. [Google Scholar] [CrossRef]
- Mehrnami, S.; Mazumder, S.K.; Soni, H. Modulation Scheme for Three-Phase Differential-Mode Ćuk Inverter. IEEE Trans. Power Electron. 2016, 31, 2654–2668. [Google Scholar] [CrossRef]
- Darwish, A.; Massoud, A.; Holliday, D.; Ahmed, S.; Williams, B. Single-stage Three-phase Differential-mode Buck-Boost Inverters with Continuous Input Current for PV Applications. IEEE Trans. Power Electron. 2016, 31, 1. [Google Scholar] [CrossRef] [Green Version]
- Za’Im, R.; Jamaludin, J.; Rahim, N.A. Photovoltaic Flyback Microinverter with Tertiary Winding Current Sensing. IEEE Trans. Power Electron. 2019, 34, 7588–7602. [Google Scholar] [CrossRef]
- Li, Y.; Oruganti, R. A Low Cost Flyback CCM Inverter for AC Module Application. IEEE Trans. Power Electron. 2011, 27, 1295–1303. [Google Scholar] [CrossRef]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- Blackburn, J.L. Symmetrical Components for Power Systems Engineering; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Aldosari, O.; Rodriguez, L.A.G.; Balda, J.C.; Mazumder, S.K. Design Trade-Offs for Medium- and High-Frequency Transformers for Isolated Power Converters in Distribution System Applications. In Proceedings of the 2018 9th IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Charlotte, NC, USA, 25–28 June 2018; pp. 1–7. [Google Scholar]
- Demystifying Type II and Type III Compensators Using Opamp and OTA for DC/DC Converters. Available online: https://pdf4pro.com/view/demystifying-type-ii-and-type-iii-compensators-1507f1.html (accessed on 8 February 2014).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control/Ref. | [29] | [33] | [34] | [35] | Proposed |
|---|---|---|---|---|---|
| Switch No. | 4 | 6 | 6 | 5 | 6 |
| Diodes No. | 4 | 6 | 6 | 4 | 0 |
| Inductor No. | 7 | 9 | 6 | 4 | 1 |
| Capacitor No. | 6 | 9 | 0 | 3 | 4 |
| Modulation scheme | DMS | DMS | CMS | CMS | CMS |
| No. of loops | 5 | 3 | 3 | 2 | 2 |
| Controller | PR | NA | PR | Hysteresis | PI |
| FSW (kHz) | 100 | 125 | 25 | 120 | 50 |
| THD (%) | 4 | 4 | 1.2 | 1.9 | 4.5 |
| No. of sensors | 7 | 7 | 7 | 4 | 5 |
| Power rating, W | 500 (Single-phase) | 500 (Three-phase) | 2500 (Three-phase) | 210 (Single-phase) | 1600 (Three-phase) |
| Switch rating | (GS66508P) 650 V, 30 A | NA | (IRG7PH50K10D) 1200 V, 90 A | FDP51N25 IPAW60R190CE | (C2M0040120D) 1200 V, 60 A |
| Component | Voltage | Current | Ripple Component |
|---|---|---|---|
| Cin | vin (VPV) | ||
| LMx (HFT) | n·ix | ||
| Cox | vox | ||
| Primary switch (S1or S2) | |||
| Secondary switch (S3or S4) | vox |
| Input DC voltage, Vdc | 100 V |
| Input filter, Lin, Cin | 150 µH, 10 µF |
| Grid voltage (L.L), Vg | 200 V, 60 Hz |
| Grid filter, Lg | 4 mH |
| HFT magnetizing inductance, LMx | 115 µH |
| HFT leakage inductance, LLeakage | 2.25 µH |
| Output capacitor, COx | 12.8 µF |
| HFT turns ratio, n | 1:1 |
| Switching Frequency, FSW | 50 kHz |
| Rated inverter power, P | 5 kW |
| Input DC voltage, Vdc | 100 V |
| Input filter, Lin, Cin | 150 µH, 10 µF |
| Input filter resistance, rin | 2 Ω |
| Grid voltage (L.L), E, ω | 200 V, 2 × π × 60 rad/s |
| HFT magnetizing inductance, LMx | 115 µH |
| HFT primary resistance, rM | 50 mΩ |
| Output capacitor, COx | 12.8 µF |
| HFT leakage inductance, LLeakage | 2.25 µH |
| HFT turns ratio, n | 1:1 |
| Grid filter, Lg | 4 mH |
| Grid inductor resistance, rg, | 25 mΩ |
| Switching Frequency, FSW | 50 kHz |
| PI controller gains, KP, KI | 0.097 A/V, 280 rad/s |
| Element | Divergence Values | Average Current/Voltage | Mismatch Percentage |
|---|---|---|---|
| HFT Magnetizing inductance | LM(u1) = 115 µH | 21 A | 3.57% (0.75 A) |
| LM(u2) = 132.25 µH | 21.75 A | ||
| LM(u3) = 97.75 µH | 20.25 A | ||
| HFT Leakage inductance | LLK(u1) = 2 µH | 21 A | 3.57% (0.75 A) |
| LLK(u2) = 2.3 µH | 21.75 A | ||
| LLK(u3) = 1.7 µH | 20.25 A | ||
| Output capacitor | Co(u1) = 12.8 µH | 163.3 V | 0.6124% (1 V) |
| Co(u2) = 14.72 µH | 164.3 V | ||
| Co(u3) = 10.88 µH | 162.3 V |
| Rated inverter power, P | 1650 kW |
| Input DC voltage, Vdc | 100 V |
| Input filter, Lin, Cin | 152.3 µH, 10 µF |
| Input filter resistance, rin | 1.5 Ω |
| Grid voltage (L.L), E, ω | 200 V, 2 × π × 60 rad/s |
| HFT magnetizing inductance, LMx | 115.52 µH |
| HFT primary resistance, rm | 50 mΩ |
| Output capacitor, COx | 12 µF |
| HFT leakage inductance, LLeakage | 2.56 µH |
| HFT turns ratio, n | 1:1 |
| Grid filter, Lg | 4 mH |
| Grid inductor resistance, rg, | 25 mΩ |
| Switching Frequency, FSW | 50 kHz |
| PI controller gains, KP, KI | 0.097 A/V, 280 rad/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, A.I.M.; Tuan, C.A.; Takeshita, T.; Sayed, M.A.; Alaas, Z.M. Modular Single-Stage Three-Phase Flyback Differential Inverter for Medium/High-Power Grid Integrated Applications. Sensors 2022, 22, 2064. https://doi.org/10.3390/s22052064
Ali AIM, Tuan CA, Takeshita T, Sayed MA, Alaas ZM. Modular Single-Stage Three-Phase Flyback Differential Inverter for Medium/High-Power Grid Integrated Applications. Sensors. 2022; 22(5):2064. https://doi.org/10.3390/s22052064
Chicago/Turabian StyleAli, Ahmed Ismail M., Cao Anh Tuan, Takaharu Takeshita, Mahmoud A. Sayed, and Zuhair Muhammed Alaas. 2022. "Modular Single-Stage Three-Phase Flyback Differential Inverter for Medium/High-Power Grid Integrated Applications" Sensors 22, no. 5: 2064. https://doi.org/10.3390/s22052064
APA StyleAli, A. I. M., Tuan, C. A., Takeshita, T., Sayed, M. A., & Alaas, Z. M. (2022). Modular Single-Stage Three-Phase Flyback Differential Inverter for Medium/High-Power Grid Integrated Applications. Sensors, 22(5), 2064. https://doi.org/10.3390/s22052064