
Amalgamation of Geometry Structure, Meteorological and Thermophysical Parameters for Intelligent Prediction of Temperature Fields in 3D Scenes



Abstract
:1. Introduction
- (1)
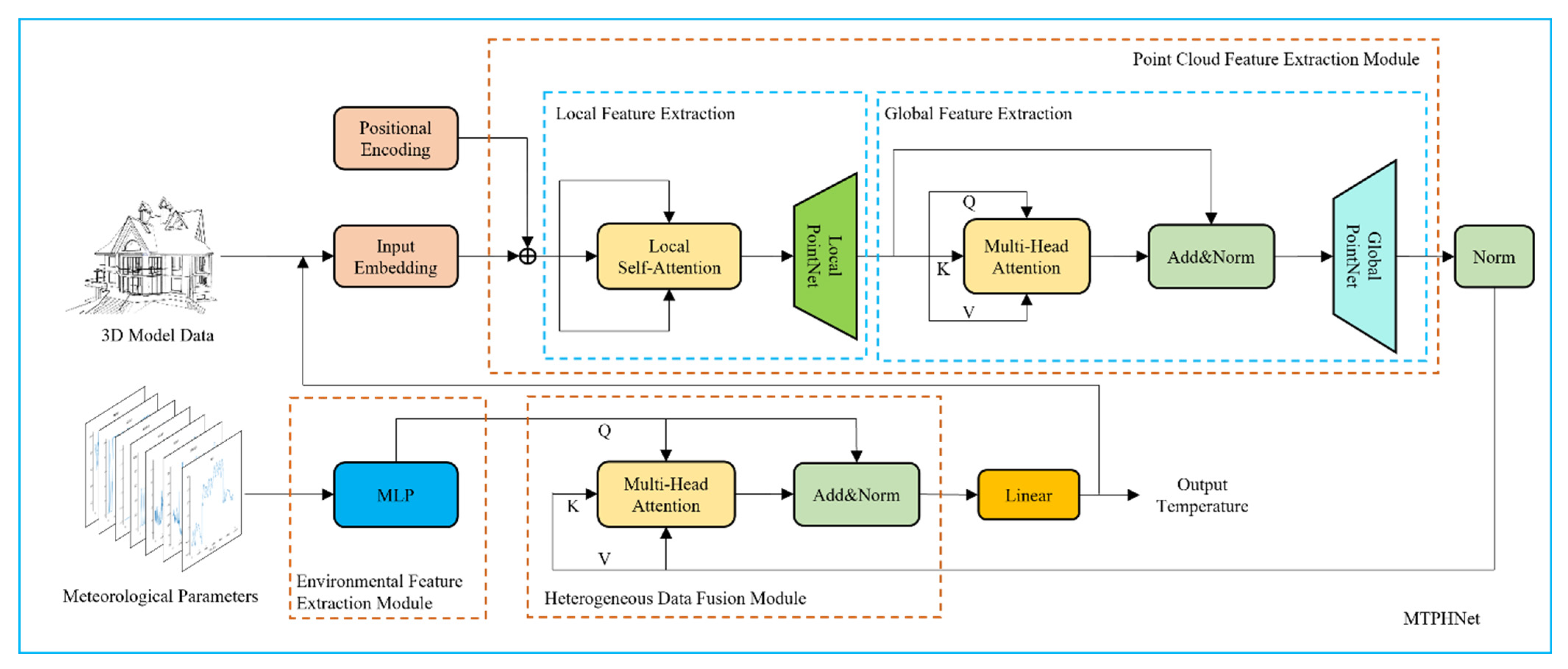
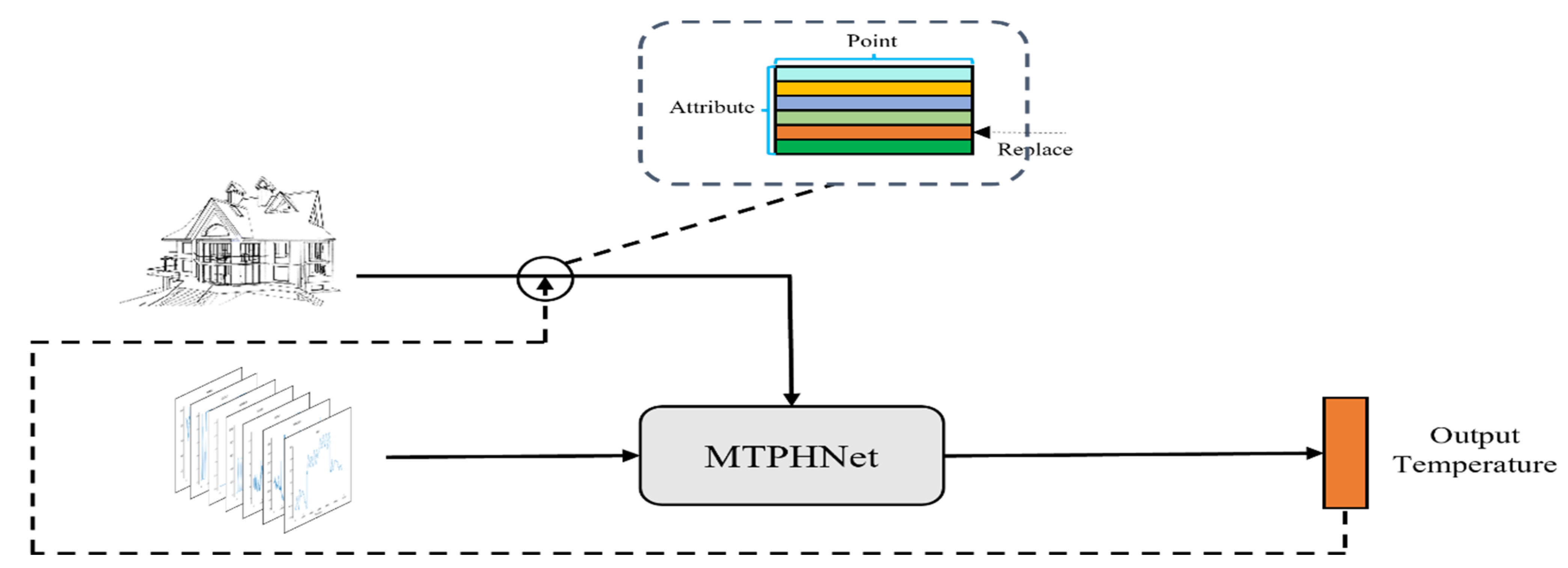
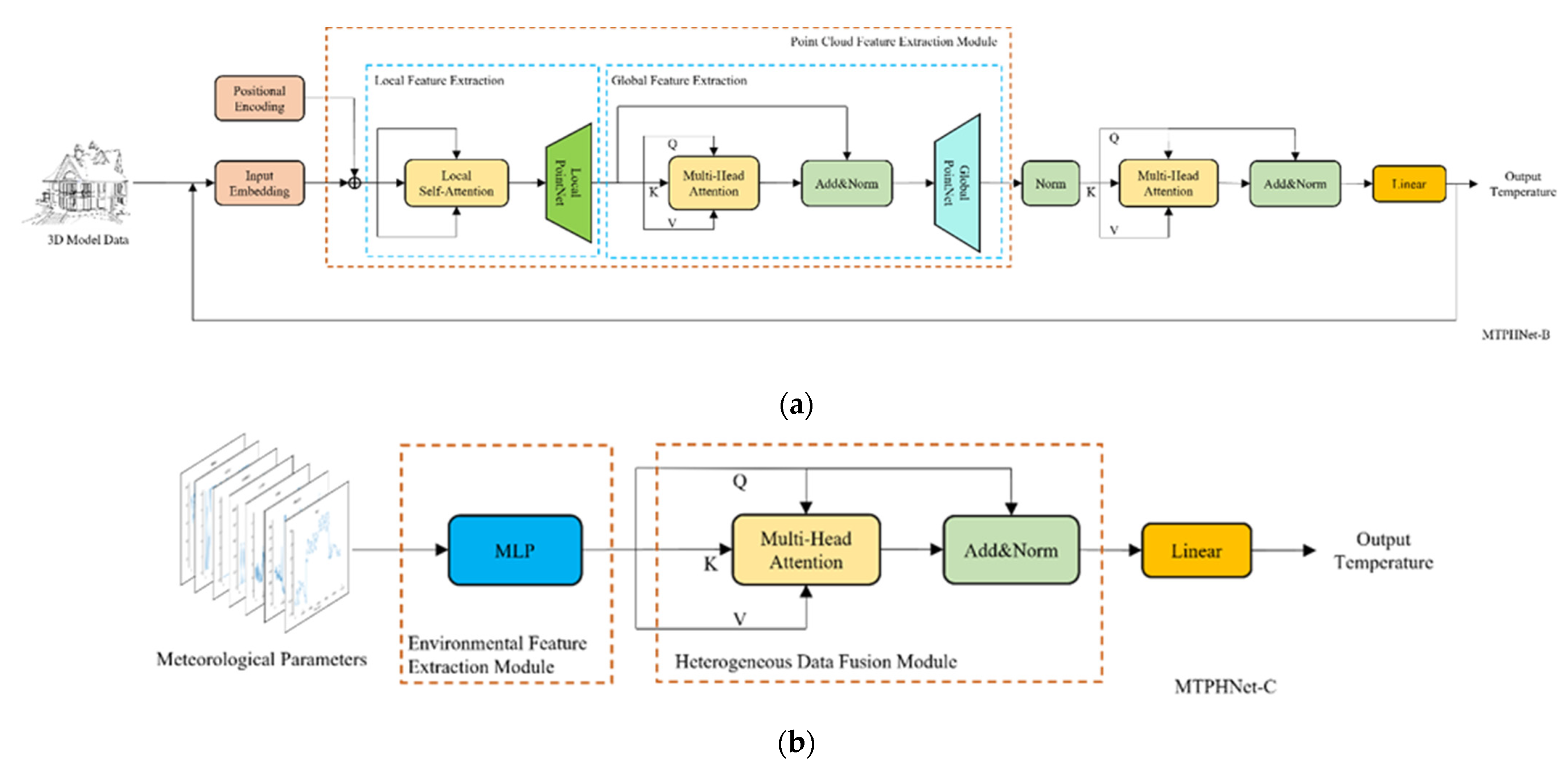
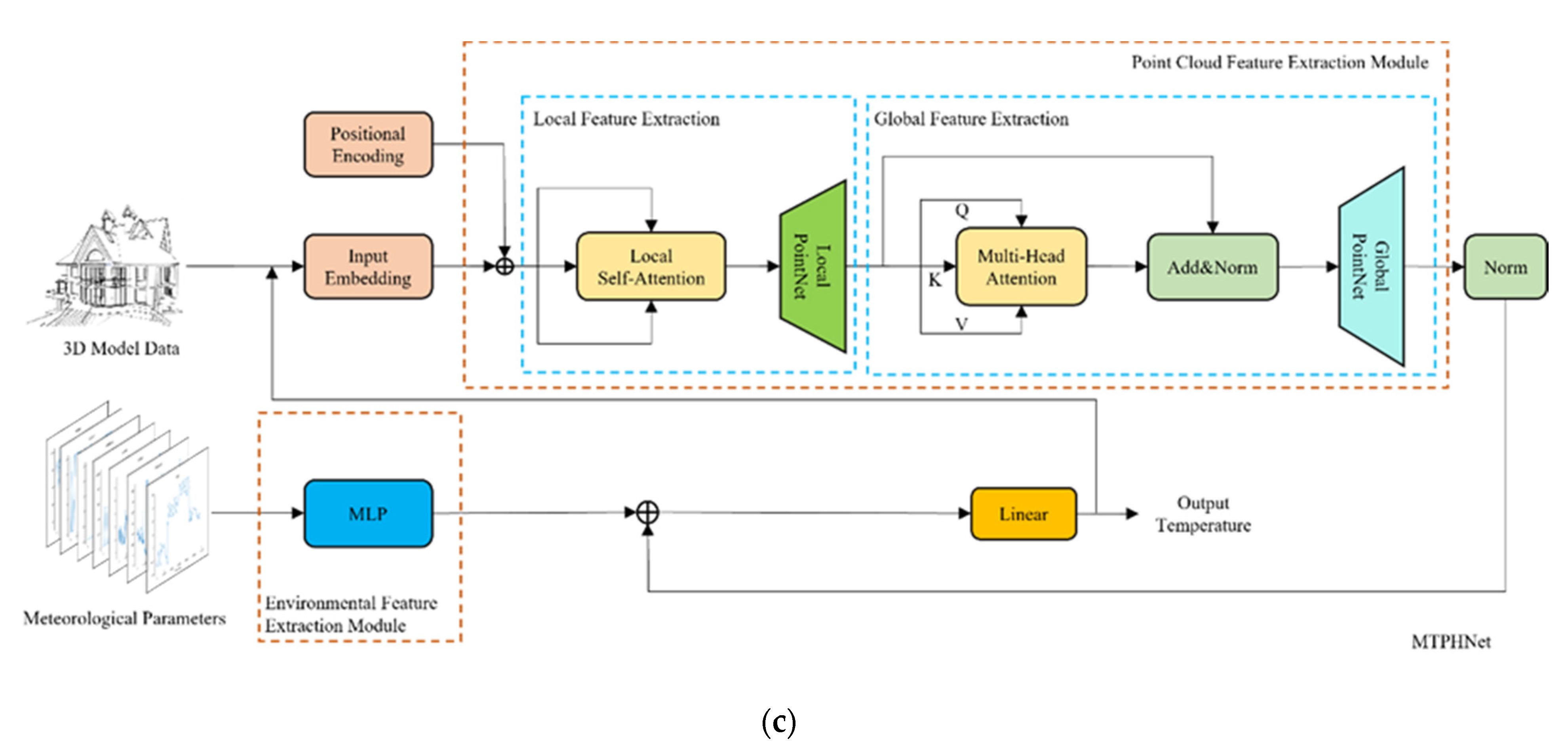
- A multivariate temperature field prediction network based on heterogeneous data (MTPHNet), which combines the characteristics of heterogeneous thermo-physical and meteorological data as 3D model parameters to predict temperature using fusion features and to improve model generalizability;
- (2)
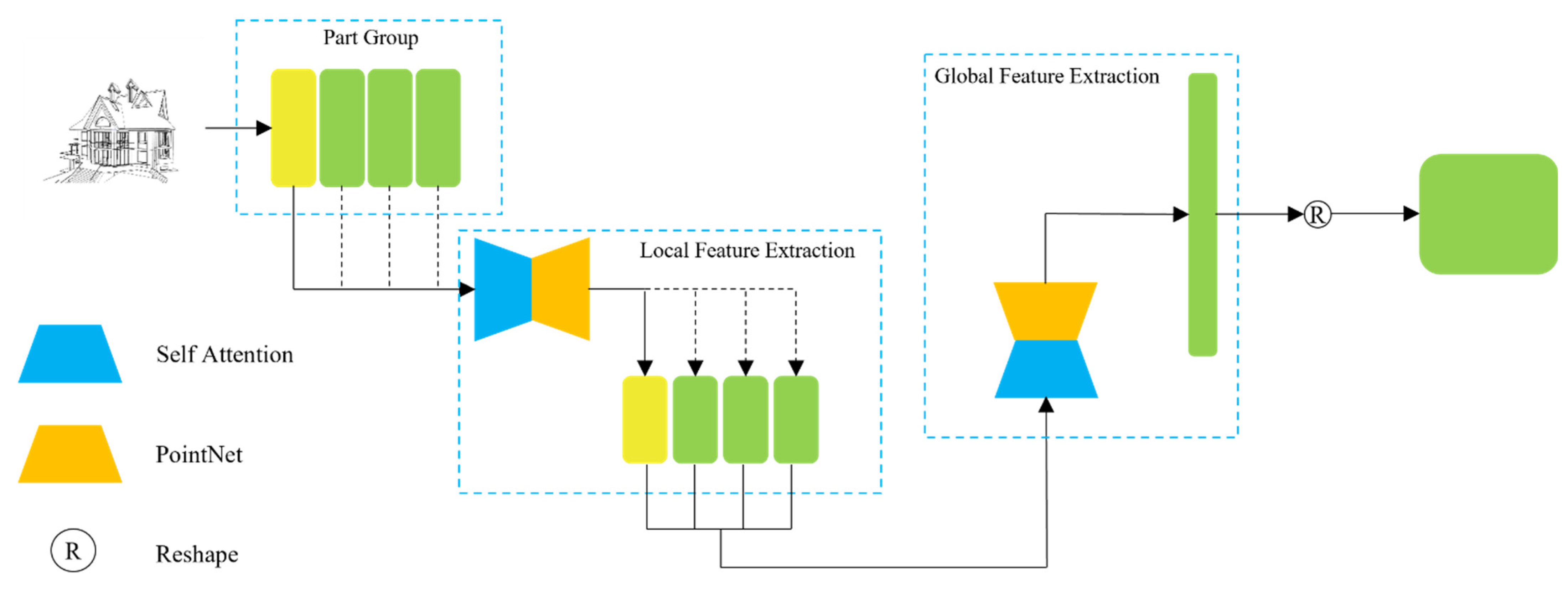
- To solve the problem of memory explosion when the Transformer (http://nlp.seas.harvard.edu/2018/04/03/attention.html, accessed on 27 February 2022) structure deals with 3D model thermophysical parameters, we propose the PointNet (https://github.com/charlesq34/pointnet, accessed on 27 February 2022) structure as the 3D model thermophysical feature extraction module and imitate the parameter sharing idea of a convolutional neural network to extract local and global features separately. The final fitting effect proves the effectiveness of the method;
- (3)
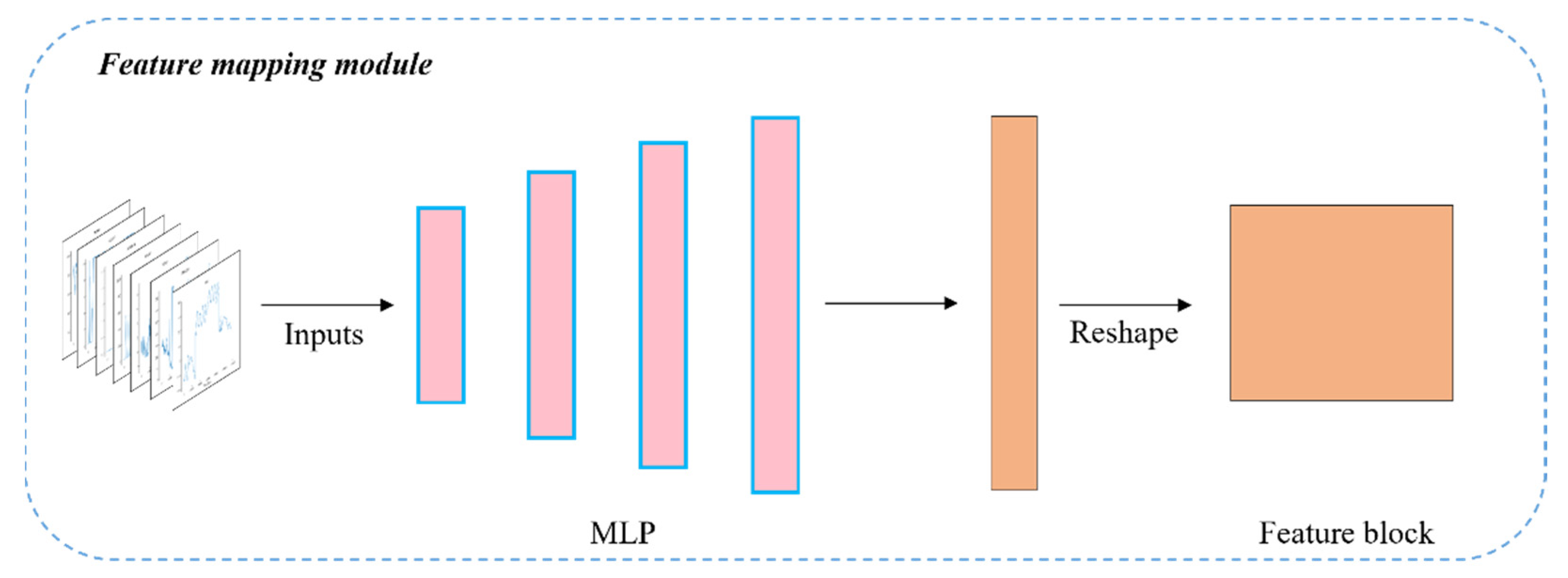
- We used a multilayer perceptron (MLP) module to map the meteorological parameters to fuse the meteorological and thermophysical parameters so that the mapped features and thermophysical parameters have the same size, which is convenient for the subsequent fusion process.
2. Materials and Methods
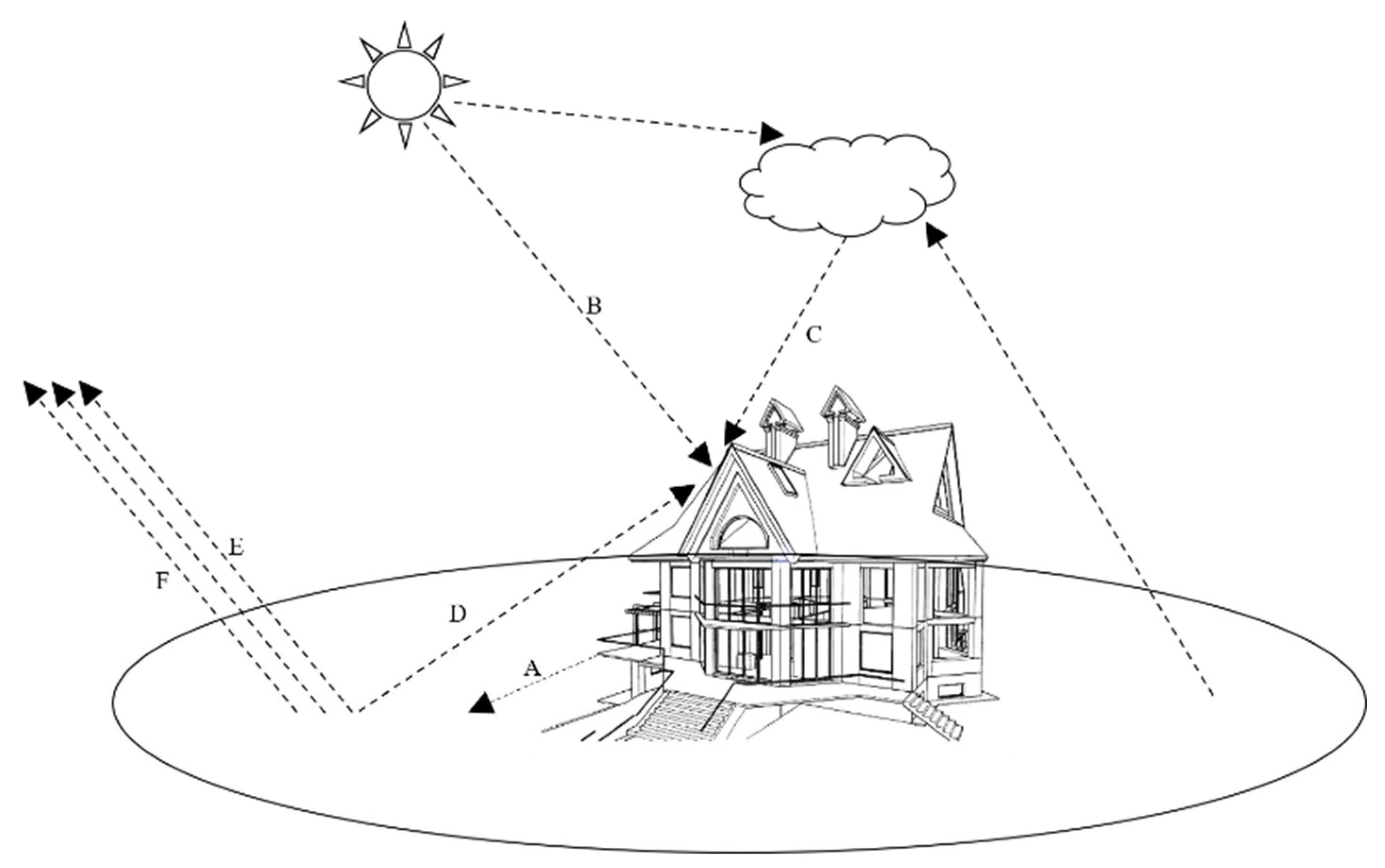
2.1. Analysis of the Parameters That Affect the Temperature Field Distribution of the 3D Model in the Natural Environment
2.1.1. Calculation Principle
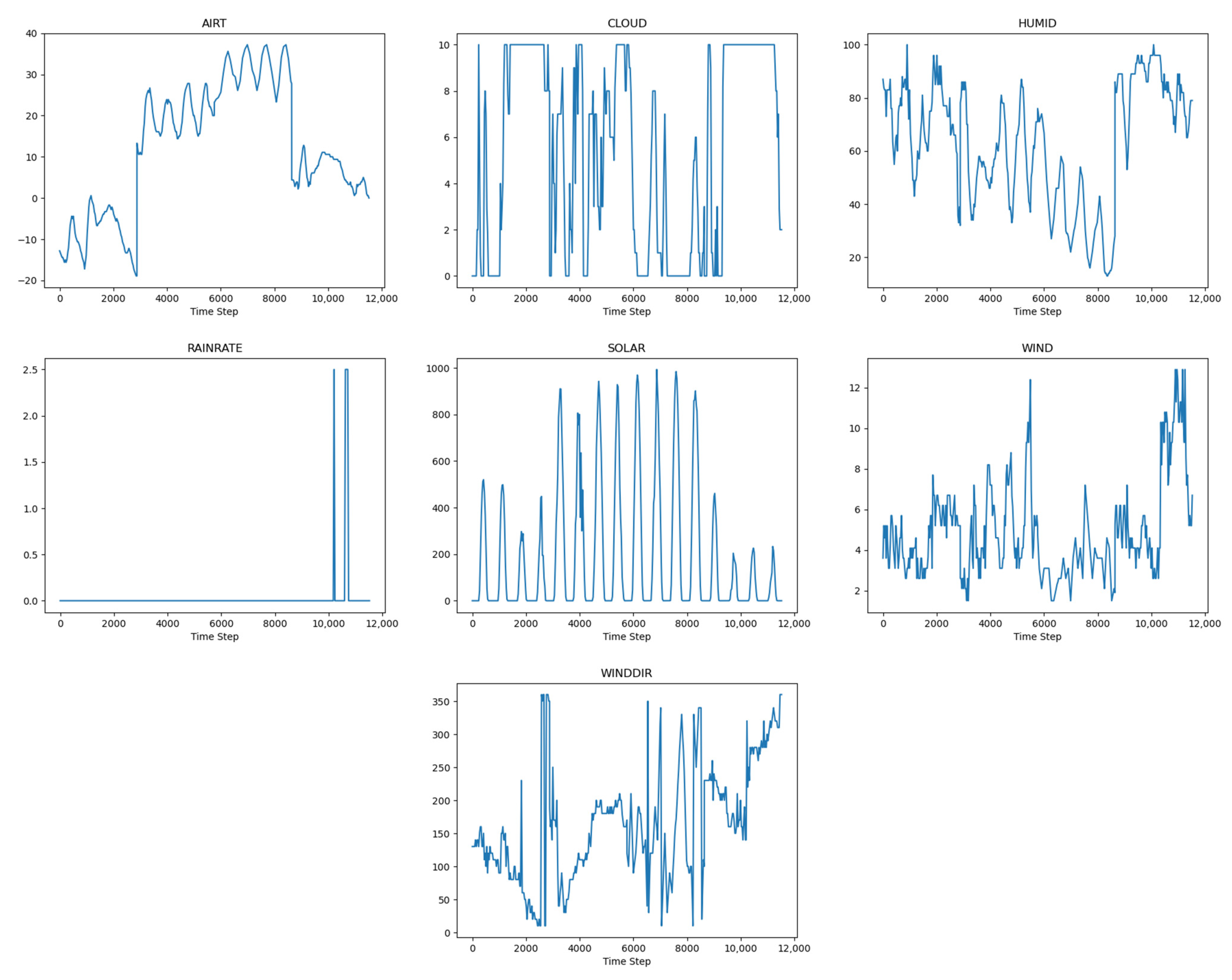
2.1.2. Determination of the Parameters That Affect the Surface Temperature Field of the Object
2.2. Design of 3D Target Temperature Field Prediction Model Based on Heterogeneous Data Fusion
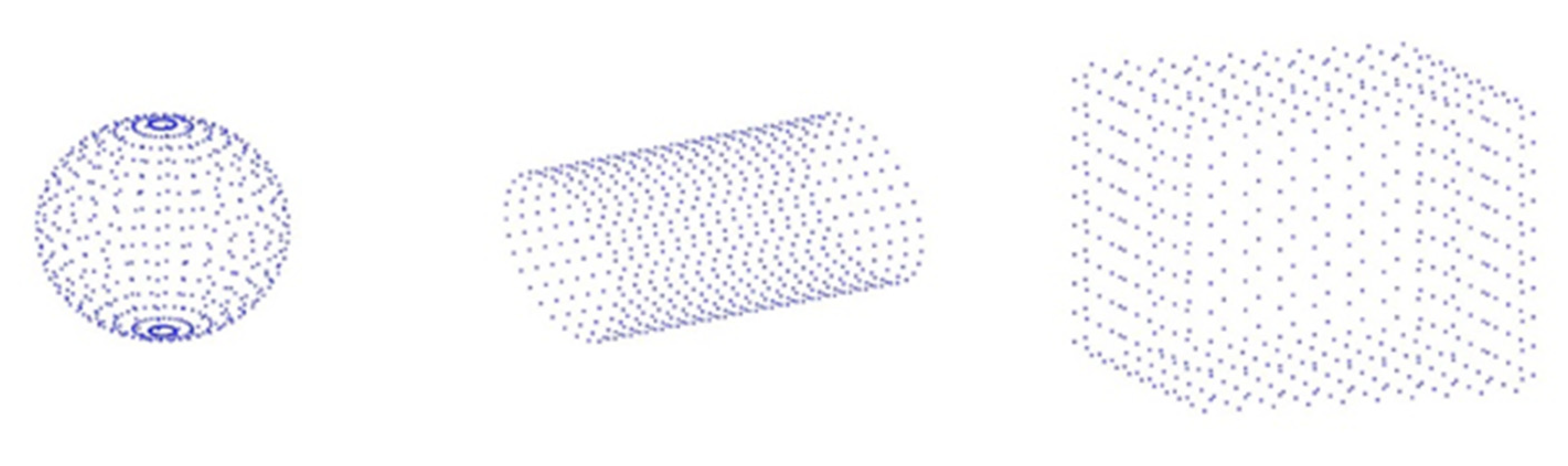
2.2.1. Point-Cloud Feature Extraction Module (PCEM)
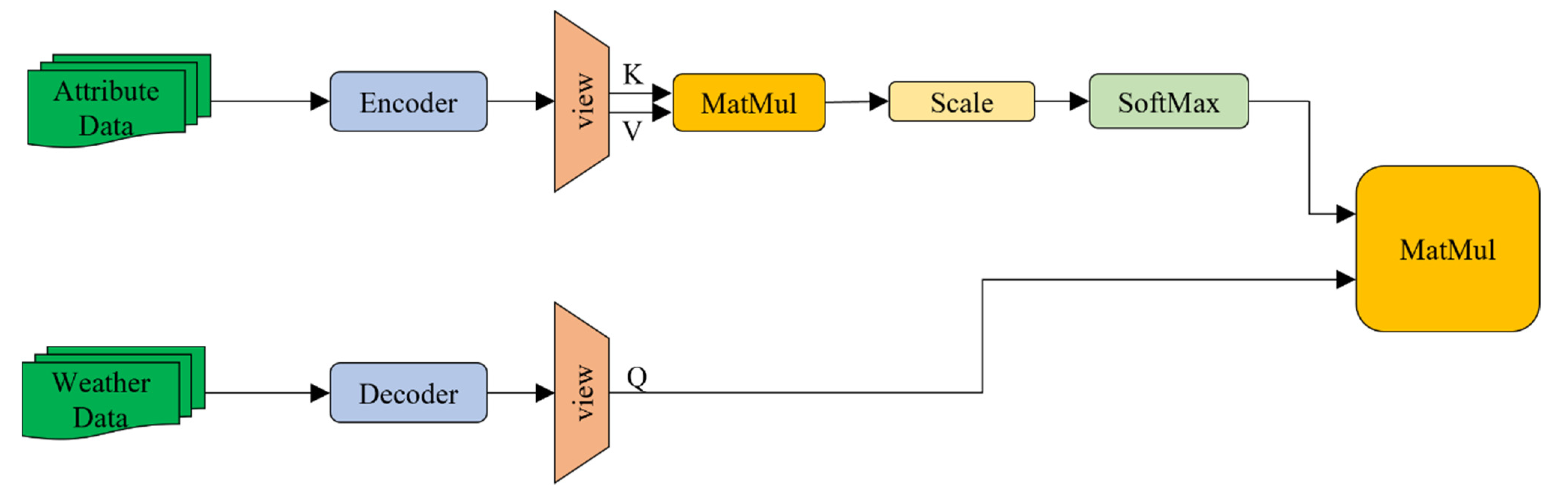
2.2.2. Environmental Data Feature Mapping Module (EMM)
2.2.3. Data Fusion Module (DFM)
2.2.4. Pseudocode
| Algorithm 1 program pseudo code of MTPHNet. | |
| Input | : meteorological parameter at the current moment. : thermophysical parameter at the current moment. : the target temperature value at the last moment. |
| Output | : the target temperature value at the current moment. |
| 1 For to 2 Replace: 3 For to 4 5 6 End for 7 8 9 10 End for | |
3. Experimental Details and Data Exploitation
3.1. Experimental Environment and Index Design
3.2. Dataset
3.2.1. Dataset Format
3.2.2. Teacher Forcing
4. Results and Discussion
4.1. Performance of the MTPHNet
4.2. Advantages of MTPHNet
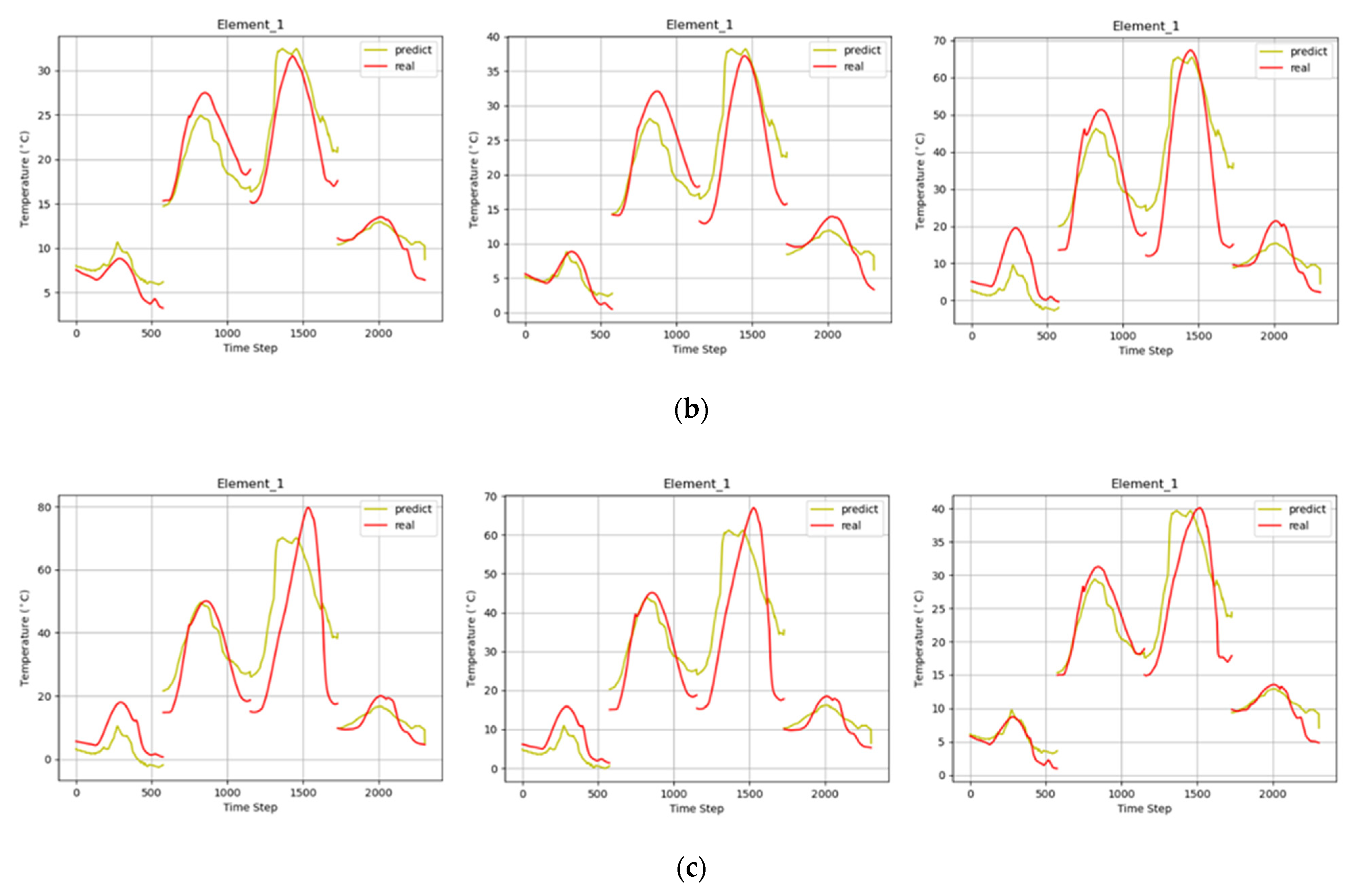
4.2.1. Multi-Object Temperature Field Prediction
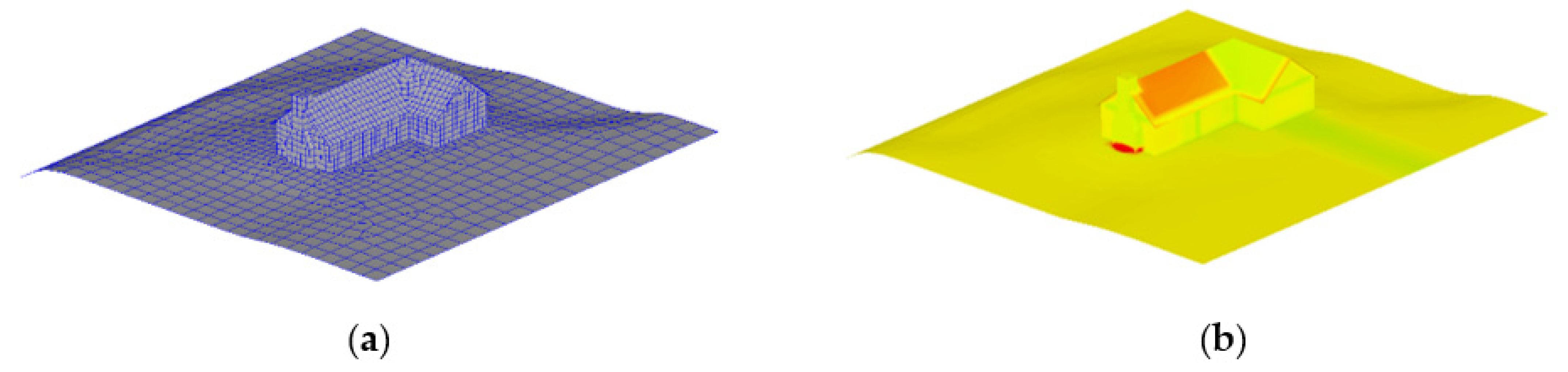
4.2.2. Prediction of Temperature Field of Complex Objects
4.3. Ablation Analysis
4.3.1. Effectiveness Analysis of EMM
4.3.2. Effectiveness Analysis of PCEM
4.3.3. Effectiveness Analysis of DFM
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gurton, K.P.; Felton, M. Remote detection of buried land-mines and IEDs using LWIR polarimetric imaging. Opt. Express 2012, 20, 22344–22359. [Google Scholar] [CrossRef] [PubMed]
- Jacobs, P.A.M. Simulation of the Thermal Behaviour of an Object and Its Nearby Surroundings; TNO-Report PH; TNO Publication: The Hague, The Netherlands, 1980. [Google Scholar]
- Biesel, H.; Rohlfing, T. Real-Time Simulated Forward Looking Infrared (FLIR) Imagery For Training. In Infrared Image Processing and Enhancement; International Society for Optics and Photonics: Bellingham, WA, USA, 1987; Volume 781, pp. 71–80. [Google Scholar] [CrossRef]
- Curtis, J.O.; Rivera, J.S. Diurnal and seasonal variation of structural element thermal signatures. In Proceedings of the SPIE 1311, Characterization, Propagation, and Simulation of Infrared Scenes; International Society for Optics and Photonics: Bellingham, WA, USA, 1990; pp. 136–145. [Google Scholar] [CrossRef]
- Balfour, L.S.; Bushlin, Y. Semi-empirical model-based approach for IR scene simulation. In Proceedings of the SPIE 3061, Infrared Technology and Applications XXIII; International Society for Optics and Photonics: Bellingham, WA, USA, 1997; pp. 616–623. [Google Scholar] [CrossRef]
- Gonda, T.G.; Jones, J.C.; Gerhart, G.R.; Thomas, D.J.; Martin, G.L.; Sass, D.T. PRISM Based Thermal Signature Modeling Simulation. In Proceedings of the SPIE Symposium on IR Sensors and Sensor Fusion, Orlando, FL, USA, 4–6 April 1988. [Google Scholar]
- Sheffer, A.D.; Cathcart, J.M. Computer generated IR imagery: A first principles modeling approach. In Proceedings of the SPIE 0933, Multispectral Image Processing and Enhancement; International Society for Optics and Photonics: Bellingham, WA, USA, 1988; pp. 199–206. [Google Scholar] [CrossRef]
- Schwenger, F.; Grossmann, P.; Malaplate, A. Validation of the thermal code of RadTherm-IR, IR-Workbench, and F-TOM. SPIE Def. Secur. Sens. 2009, 7300, 73000J. [Google Scholar] [CrossRef]
- Hu, H.; Guo, C.; Hu, H. Real Time Infrared Scene Simulation System Based on Database Lookup Table Technology. Infrared Technol. 2013, 6, 329–333+344. [Google Scholar]
- Huang, C.; Wu, X. Infrared Signature Simulation Based on the Modular Neural Network. J. Proj. Rocket. Missiles Guid. 2006, 4, 272–275. [Google Scholar]
- Huang, C.; Wu, X.; Tong, W. Infrared image simulation based on statistical learning theory. Int. J. Infrared. Millim. Waves 2007, 28, 1143–1153. [Google Scholar]
- Drucker, H.; Burges, C.J.; Kaufman, L.; Smola, A.; Vapnik, V. Support vector regression machines. Adv. Neural. Inf. Process. Syst. 1997, 9, 155–161. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 5998–6008. [Google Scholar]
- Mnih, V.; Heess, N.; Graves, A. Recurrent models of visual attention. Adv. Neural Inf. Process. Syst. 2014, 2, 2204–2212. [Google Scholar]
- Nishijima, Y.; To, N.; Balčytis, A.; Juodkazis, S. Absorption and scattering in perfect ther-mal radiation absorber-emitter metasurfaces. Opt. Express 2022, 30, 4058–4070. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.; Zhang, S.; Peng, J.; Zhang, S.; Li, J.; Xiong, H.; Zhang, W. Informer: Beyond efficient Transformer for long sequence time-series forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, Palo Alto, CA USA, 2–9 February 2021; Volume 35, pp. 11106–11115. [Google Scholar]
- Qi, C.R.; Su, H.; Kaichun, M.; Guibas, L.J. Pointnet: Deep learning on point sets for 3D classification and segmenta-tion. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 77–85. [Google Scholar] [CrossRef] [Green Version]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. Pointnet++: Deep hi-erarchical feature learning on point sets in a metric space. arXiv 2017, arXiv:1706.02413. [Google Scholar]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation Applied to Handwritten Zip Code Recognition. Neural Comput. 1989, 1, 541–551. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, F.; Han, Y.; Chen, C. Fast prediction of complicated temperature field using Conditional Mul-ti-Attention Generative Adversarial Networks (CMAGAN). Expert Syst. Appl. 2021, 186, 115727. [Google Scholar] [CrossRef]
- Willmott, C.J.; Matsuura, K. Advantages of the mean absolute error (MAE) over the root mean square error (RMSE) in assessing average model performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]
- Hyndman, R.J.; Koehler, A.B. Another look at measures of forecast accuracy. Int. J. Forecast. 2006, 22, 679–688. [Google Scholar] [CrossRef] [Green Version]
- Chicco, D.; Warrens, M.J.; Jurman, G. The coefficient of determination R-squared is more informative than SMAPE, MAE, MAPE, MSE and RMSE in regression analysis evaluation. PeerJ Comput. Sci. 2021, 7, e623. [Google Scholar] [CrossRef] [PubMed]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Parameters | Space Coordinates | Density | Specific Heat | Conductivity | Thickness | Convection | Emissivity | Absorptivity | Initial Temperature |
|---|---|---|---|---|---|---|---|---|---|
| Unit | (mm) | (kg/m3) | (J/kg·K) | (W/m·K) | (mm) | Bool | / | / | °C |
| Algorithm Model | MAE | RMSE | R-Squared |
|---|---|---|---|
| v-SVR | 17.329 | 21.17 | −388.6 |
| CBPNN | 2.249 | 3.474 | 0.889 |
| MTPHNet | 1.722 | 2.512 | 0.941 |
| Model | Material | MAE | RMSE | R-Square |
|---|---|---|---|---|
| Box | 1 | 2.077 | 2.568 | 0.938 |
| 2 | 3.953 | 5.664 | 0.877 | |
| 3 | 1.785 | 2.153 | 0.929 | |
| Cylinder | 1 | 4.419 | 6.224 | 0.855 |
| 2 | 2.497 | 3.320 | 0.901 | |
| 3 | 5.572 | 7.976 | 0.821 | |
| Sphere | 1 | 1.910 | 2.329 | 0.918 |
| 2 | 2.556 | 3.245 | 0.897 | |
| 3 | 4.843 | 6.927 | 0.831 |
| Model | MAE | RMSE | R-Square |
|---|---|---|---|
| House | 2.645 | 3.522 | 0.964 |
| Model | MAE | RMSE | R-Square |
|---|---|---|---|
| MTPHNet-A (Original) | 1.722 | 2.512 | 0.941 |
| MTPHNet-B (no EMM) | 8.734 | 10.362 | −0.011 |
| MTPHNet-C (no PCEM) | 2.277 | 3.516 | 0.885 |
| MTPHNet-D (no DFM) | 2.303 | 3.431 | 0.89 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Li, L.; Ni, W.; Liu, B.; Zhou, W.; Xiao, Q. Amalgamation of Geometry Structure, Meteorological and Thermophysical Parameters for Intelligent Prediction of Temperature Fields in 3D Scenes. Sensors 2022, 22, 2386. https://doi.org/10.3390/s22062386
Cao Y, Li L, Ni W, Liu B, Zhou W, Xiao Q. Amalgamation of Geometry Structure, Meteorological and Thermophysical Parameters for Intelligent Prediction of Temperature Fields in 3D Scenes. Sensors. 2022; 22(6):2386. https://doi.org/10.3390/s22062386
Chicago/Turabian StyleCao, Yuan, Ligang Li, Wei Ni, Bo Liu, Wenbo Zhou, and Qi Xiao. 2022. "Amalgamation of Geometry Structure, Meteorological and Thermophysical Parameters for Intelligent Prediction of Temperature Fields in 3D Scenes" Sensors 22, no. 6: 2386. https://doi.org/10.3390/s22062386
APA StyleCao, Y., Li, L., Ni, W., Liu, B., Zhou, W., & Xiao, Q. (2022). Amalgamation of Geometry Structure, Meteorological and Thermophysical Parameters for Intelligent Prediction of Temperature Fields in 3D Scenes. Sensors, 22(6), 2386. https://doi.org/10.3390/s22062386