
Calibration and Localization of Optically Pumped Magnetometers Using Electromagnetic Coils

 ,
,  , , , and
, , , and 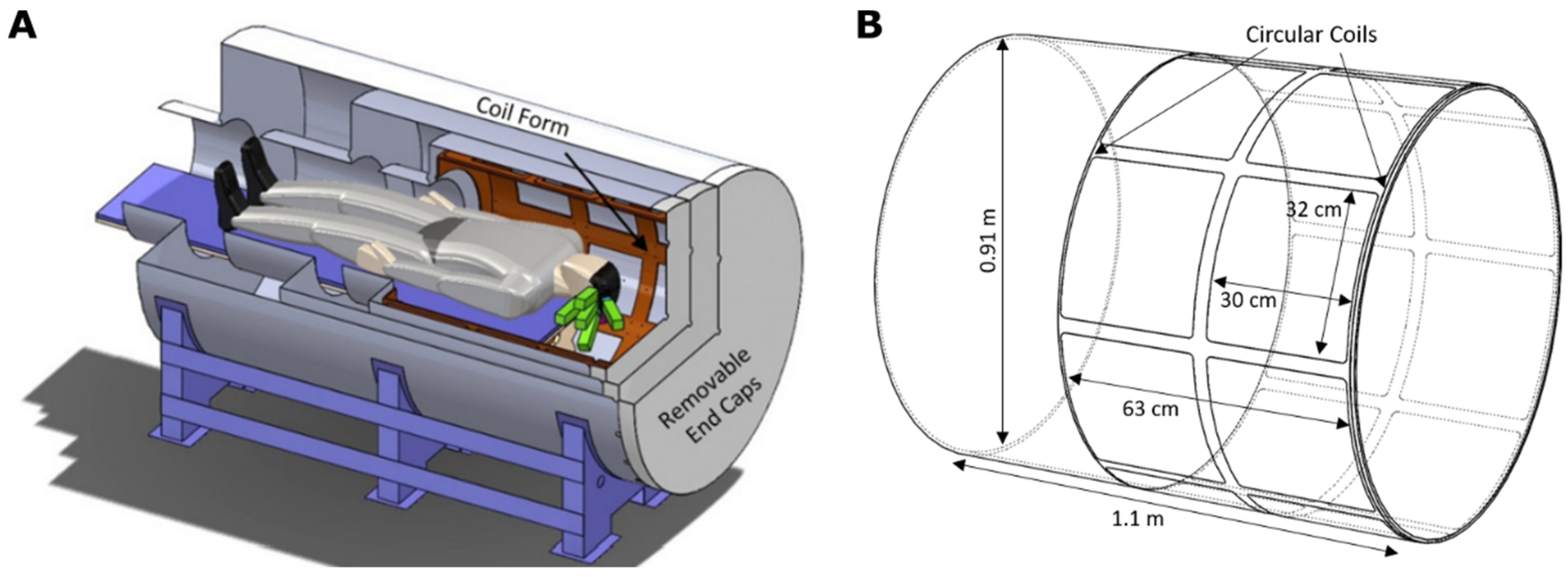{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Background
2.1. Obtaining Magnetic Field Models
2.2. Simplifying the Optimization Problem
2.3. Summary of the Method
- Measure the magnetic fields of the N coils with a well-calibrated vector sensor (e.g., fluxgate magnetometer) over the region of the sensor array (the OPMs). Fit VSH models to the measurements.
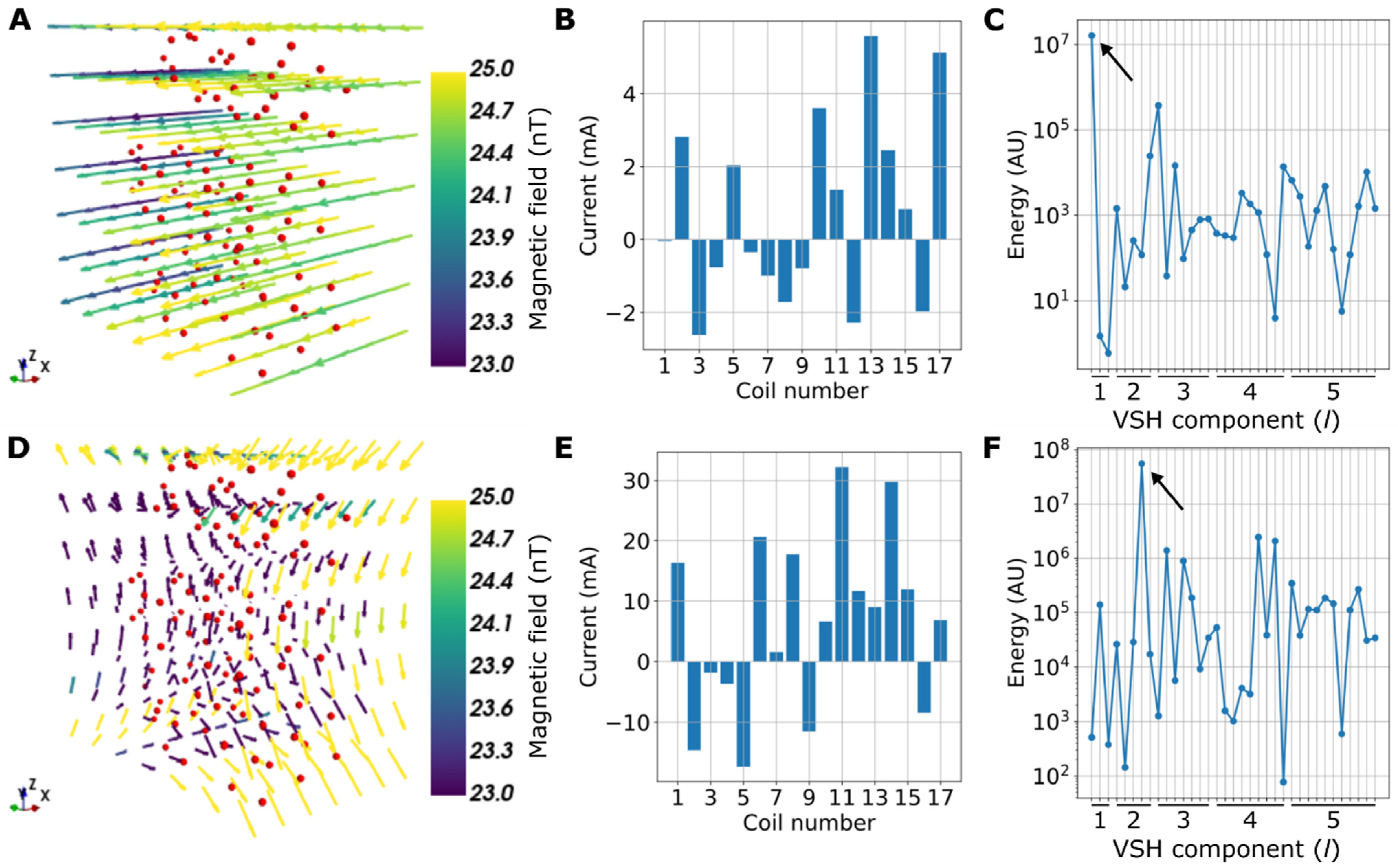
- Using the VSH models, compute the currents for exciting homogeneous fields and first-order gradients.
- Measure the response of the sensor (which is to be calibrated) to the homogeneous fields and gradients.
- Compute and using the lowest-order VSH coefficients with Equations (5) and (6).
- (Optional): Fine-tune the estimates and by optimizing Equation (2) with full VSH models of the homogeneous and gradient fields.
- Excite coils individually.
- c.
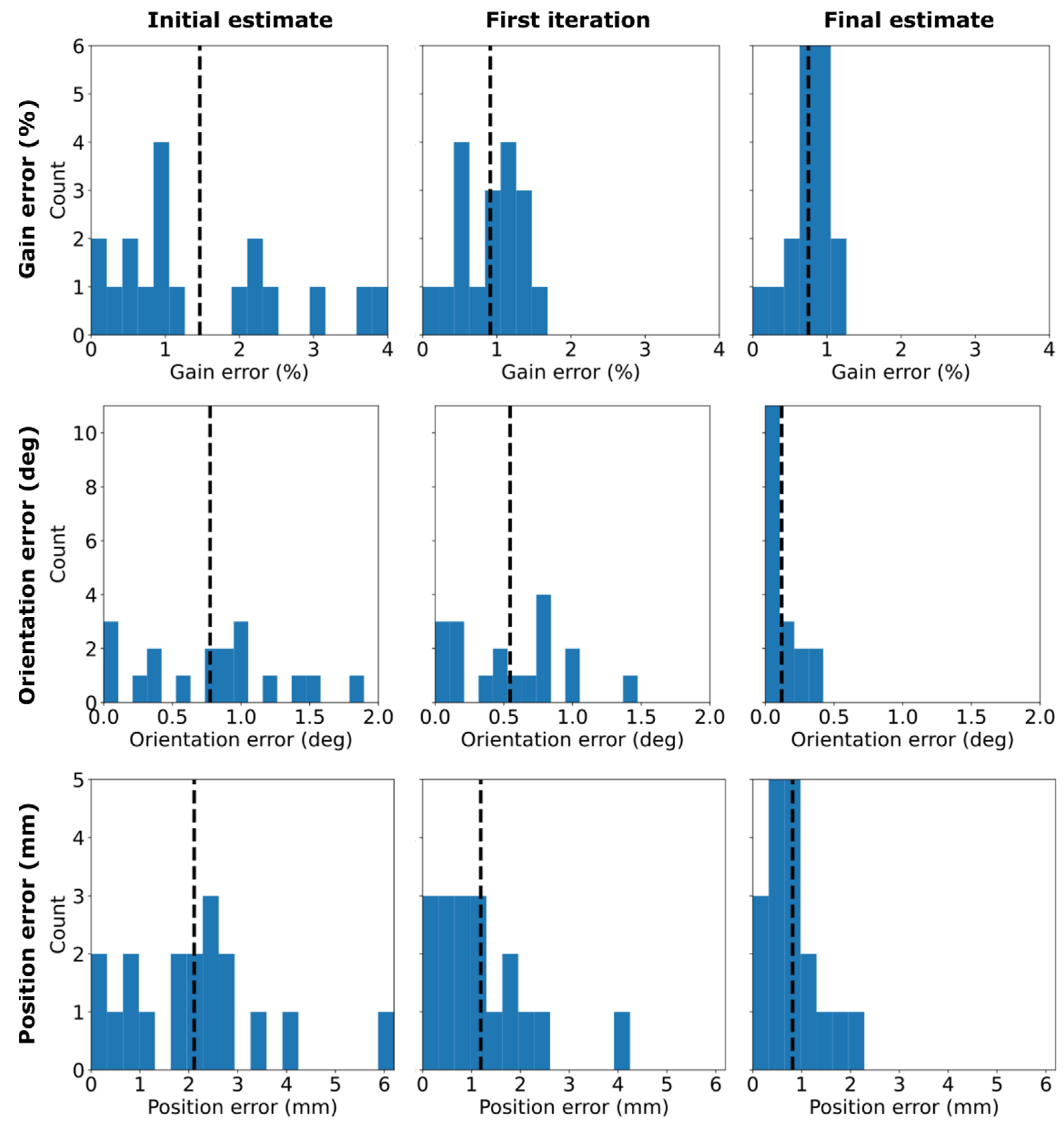
- Find the sensor parameters by optimizing Equation (2) using the full VSH models. Use and (from step 3a or 3b) as initial estimates for the sensor parameters.
3. Methods
3.1. Measurement of the Coil Fields
3.2. Calibration Methodology
3.3. Fluxgate Validation
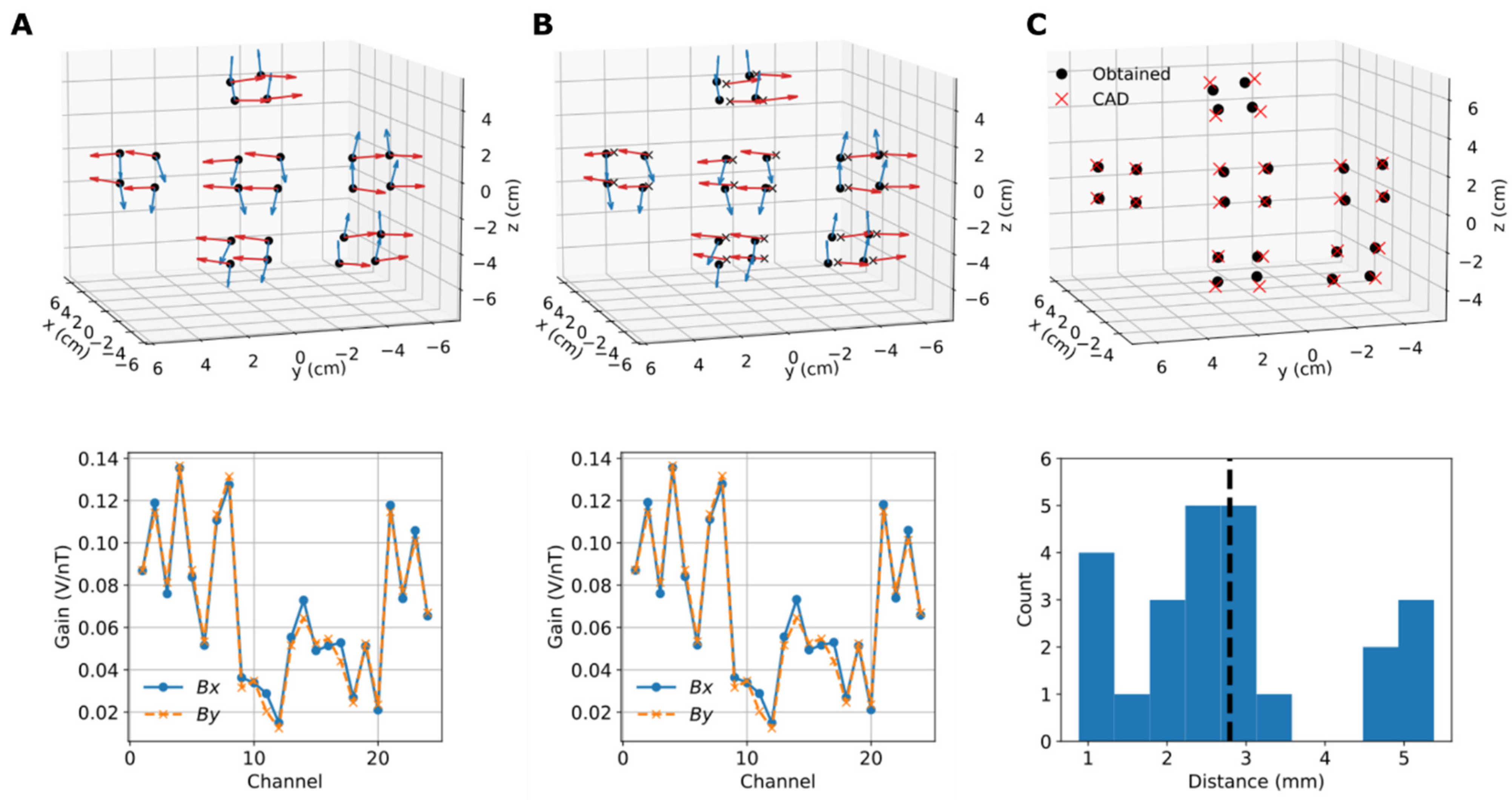
3.4. Calibration of the OPM Array
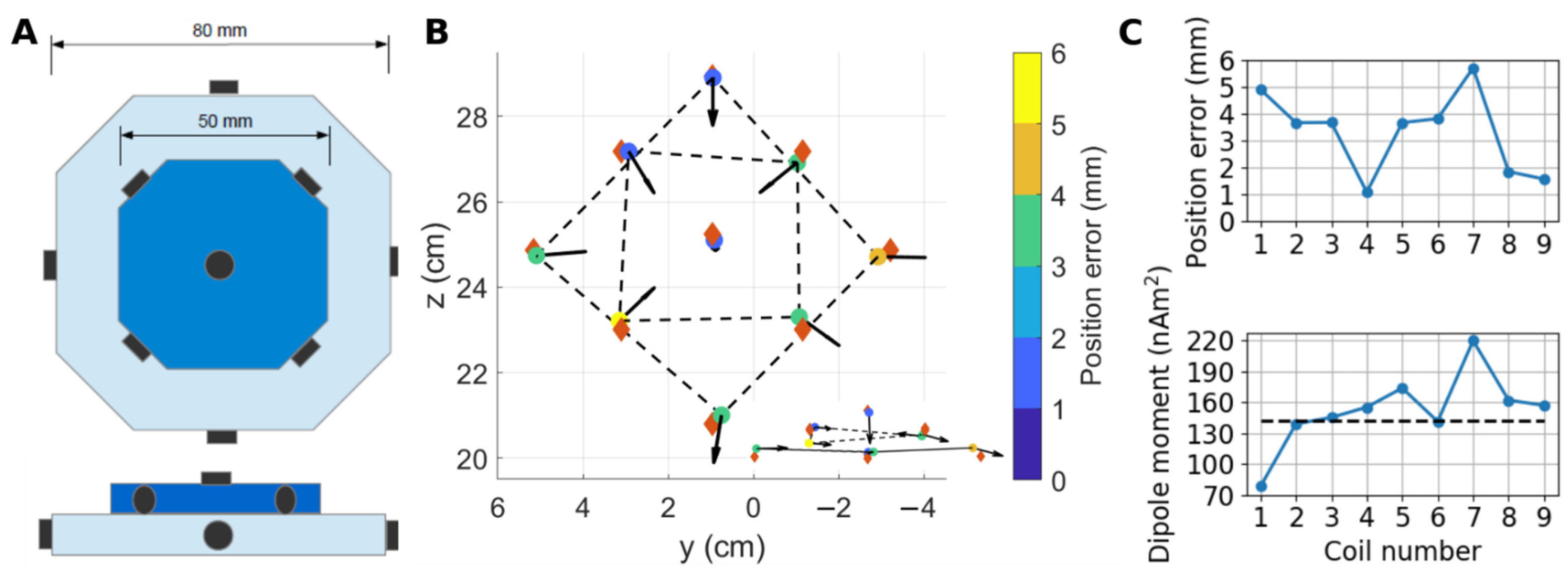
3.5. Localizing Magnetic Dipoles in a Phantom
4. Results
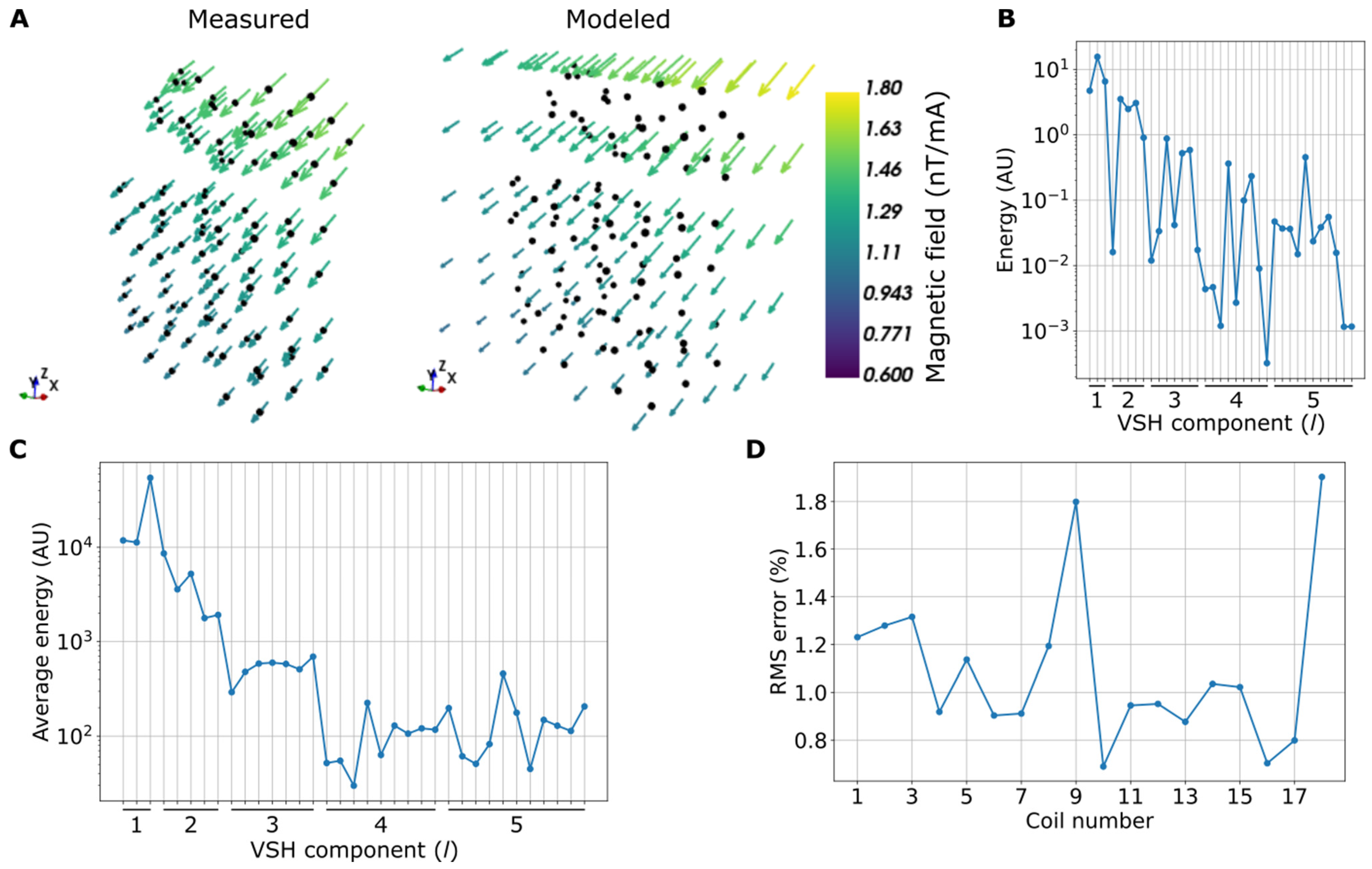
4.1. Modeling the Magnetic Field Measurements with VSHs
4.2. Fluxgate Validation
4.3. Calibration of the OPM Array and Phantom Localization
5. Discussion
5.1. Comparison to Previous Studies
5.2. Study Design and Caveats
5.3. Future Directions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Hämäläinen, M.; Hari, R.; Ilmoniemi, R.J.; Knuutila, J.; Lounasmaa, O.V. Magnetoencephalography—theory, instrumentation, and applications to noninvasive studies of the working human brain. Rev. Mod. Phys. 1993, 65, 413. [Google Scholar] [CrossRef] [Green Version]
- de Melo, C.F.; Araújo, R.L.; Ardjomand, L.M.; Quoirin NS, R.; Ikeda, M.; Costa, A.A. Calibration of low frequency magnetic field meters using a Helmholtz coil. Measurement 2009, 42, 1330–1334. [Google Scholar] [CrossRef]
- Li, H.; Zhang, S.L.; Zhang, C.X.; Kong, X.Y.; Xie, X.M. An efficient calibration method for SQUID measurement system using three orthogonal Helmholtz coils. Chin. Phys. B 2016, 25, 068501. [Google Scholar] [CrossRef]
- Chella, F.; Zappasodi, F.; Marzetti, L.; Della Penna, S.; Pizzella, V. Calibration of a multichannel MEG system based on the Signal Space Separation method. Phys. Med. Biol. 2012, 57, 4855. [Google Scholar] [CrossRef]
- Adachi, Y.; Higuchi, M.; Oyama, D.; Haruta, Y.; Kawabata, S.; Uehara, G. Calibration for a multichannel magnetic sensor array of a magnetospinography system. IEEE Trans. Magn. 2014, 50, 5001304. [Google Scholar] [CrossRef]
- Adachi, Y.; Oyama, D.; Terazono, Y.; Hayashi, T.; Shibuya, T.; Kawabata, S. Calibration of room temperature magnetic sensor array for biomagnetic measurement. IEEE Trans. Magn. 2019, 55, 5000506. [Google Scholar] [CrossRef]
- Ahlfors, S.; Ilmoniemi, R.J. Magnetometer position indicator for multichannel MEG. In Advances in Biomagnetism; Springer: Boston, MA, USA, 1989; pp. 693–696. [Google Scholar]
- Hansen, P.; Kringelbach, M.; Salmelin, R. (Eds.) MEG: An Introduction to Methods; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
- Boto, E.; Bowtell, R.; Krüger, P.; Fromhold, T.M.; Morris, P.G.; Meyer, S.S.; Barnes, G.R.; Brookes, M.J. On the potential of a new generation of magnetometers for MEG: A beamformer simulation study. PLoS ONE 2016, 11, e0157655. [Google Scholar] [CrossRef]
- Iivanainen, J.; Stenroos, M.; Parkkonen, L. Measuring MEG closer to the brain: Performance of on-scalp sensor arrays. NeuroImage 2017, 147, 542–553. [Google Scholar] [CrossRef]
- Zetter, R.; Iivanainen, J.; Parkkonen, L. Optical Co-registration of MRI and On-scalp MEG. Sci. Rep. 2019, 9, 5490. [Google Scholar] [CrossRef] [Green Version]
- Iivanainen, J.; Mäkinen, A.J.; Zetter, R.; Stenroos, M.; Ilmoniemi, R.J.; Parkkonen, L. Spatial sampling of MEG and EEG based on generalized spatial-frequency analysis and optimal design. NeuroImage 2021, 245, 118747. [Google Scholar] [CrossRef]
- Hill, R.M.; Boto, E.; Rea, M.; Holmes, N.; Leggett, J.; Coles, L.A.; Papastavrou, M.; Everton, S.K.; Hunt, B.A.; Sims, D.; et al. Multi-channel whole-head OPM-MEG: Helmet design and a comparison with a conventional system. NeuroImage 2020, 219, 116995. [Google Scholar] [CrossRef] [PubMed]
- Gu, W.; Ru, X.; Li, D.; He, K.; Cui, Y.; Sheng, J.; Gao, J.H. Automatic coregistration of MRI and on-scalp MEG. J. Neurosci. Methods 2021, 358, 109181. [Google Scholar] [CrossRef] [PubMed]
- Cao, F.; An, N.; Xu, W.; Wang, W.; Yang, Y.; Xiang, M.; Gao, Y.; Ning, X. Co-registration Comparison of On-Scalp Magnetoencephalography and Magnetic Resonance Imaging. Front. Neurosci. 2021, 15, 706785. [Google Scholar] [CrossRef] [PubMed]
- Pfeiffer, C.; Andersen, L.M.; Lundqvist, D.; Hämäläinen, M.; Schneiderman, J.F.; Oostenveld, R. Localizing on-scalp MEG sensors using an array of magnetic dipole coils. PLoS ONE 2018, 13, e0191111. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pfeiffer, C.; Ruffieux, S.; Andersen, L.M.; Kalabukhov, A.; Winkler, D.; Oostenveld, R.; Lundqvist, D.; Schneiderman, J.F. On-scalp MEG sensor localization using magnetic dipole-like coils: A method for highly accurate co-registration. NeuroImage 2020, 212, 116686. [Google Scholar] [CrossRef] [PubMed]
- Borna, A.; Carter, T.R.; Goldberg, J.D.; Colombo, A.P.; Jau, Y.Y.; Berry, C.; McKay, J.; Stephen, J.; Weisend, M.; Schwindt, P.D. A 20-channel magnetoencephalography system based on optically pumped magnetometers. Phys. Med. Biol. 2017, 62, 8909. [Google Scholar] [CrossRef]
- Holmes, N.; Leggett, J.; Boto, E.; Roberts, G.; Hill, R.M.; Tierney, T.M.; Shah, V.; Barnes, G.R. A bi-planar coil system for nulling background magnetic fields in scalp mounted magnetoencephalography. NeuroImage 2018, 181, 760–774. [Google Scholar] [CrossRef]
- Iivanainen, J.; Zetter, R.; Grön, M.; Hakkarainen, K.; Parkkonen, L. On-scalp MEG system utilizing an actively shielded array of optically-pumped magnetometers. NeuroImage 2019, 194, 244–258. [Google Scholar] [CrossRef]
- Hill, E.L. The theory of vector spherical harmonics. Am. J. Phys. 1954, 22, 211–214. [Google Scholar] [CrossRef]
- Taulu, S.; Kajola, M. Presentation of electromagnetic multichannel data: The signal space separation method. J. Appl. Phys. 2005, 97, 124905. [Google Scholar] [CrossRef] [Green Version]
- Taulu, S.; Kajola, M.; Simola, J. Suppression of interference and artifacts by the signal space separation method. Brain Topogr. 2004, 16, 269–275. [Google Scholar] [CrossRef] [PubMed]
- Simola, J.; Taulu, S. Method for Designing Coil Systems for Generation of Magnetic Fields of Desired Geometry, a Magnetic Resonance Imaging or Magnetoencephalography Apparatus with a Coil Assembly and a Computer Program. U.S. Patent No. 9,977,764, 22 May 2018. [Google Scholar]
- Borna, A.; Carter, T.R.; Colombo, A.P.; Jau, Y.Y.; McKay, J.; Weisend, M.; Taulu, S.; Stephen, J.M.; Schwindt, P.D. Non-invasive functional-brain-imaging with an OPM-based magnetoencephalography system. PLoS ONE 2020, 15, e0227684. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Johnson, C.; Schwindt, P.D.; Weisend, M. Magnetoencephalography with a two-color pump-probe, fiber-coupled atomic magnetometer. Appl. Phys. Lett. 2010, 97, 243703. [Google Scholar] [CrossRef]
- Colombo, A.P.; Carter, T.R.; Borna, A.; Jau, Y.Y.; Johnson, C.N.; Dagel, A.L.; Schwindt, P.D. Four-channel optically pumped atomic magnetometer for magnetoencephalography. Opt. Express 2016, 24, 15403–15416. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mäkinen, A.J.; Zetter, R.; Iivanainen, J.; Zevenhoven, K.C.; Parkkonen, L.; Ilmoniemi, R.J. Magnetic-field modeling with surface currents. Part I. Physical and computational principles of bfieldtools. J. Appl. Phys. 2020, 128, 063906. [Google Scholar] [CrossRef]
- Zetter, R.; JMäkinen, A.; Iivanainen, J.; Zevenhoven, K.C.; Ilmoniemi, R.J.; Parkkonen, L. Magnetic field modeling with surface currents. Part II. Implementation and usage of bfieldtools. J. Appl. Phys. 2020, 128, 063905. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental algorithms for scientific computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [Green Version]
- Umeyama, S. Least-squares estimation of transformation parameters between two point patterns. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 376–380. [Google Scholar] [CrossRef] [Green Version]
- Oostenveld, R.; Fries, P.; Maris, E.; Schoffelen, J.M. FieldTrip: Open source software for advanced analysis of MEG, EEG, and invasive electrophysiological data. Comput. Intell. Neurosci. 2011, 2011, 156869. [Google Scholar] [CrossRef]
- Borna, A.; Iivanainen, J.; Carter, T.R.; McKay, J.; Taulu, S.; Stephen, J.; Schwindt, P.D. Cross-Axis Projection Error in Optically Pumped Magnetometers and its Implication for Magnetoencephalography Systems. NeuroImage 2021, 247, 118818. [Google Scholar] [CrossRef]
- Ahonen, A.I.; Hämäläinen, M.S.; Ilmoniemi, R.J.; Kajola, J.E.; Simola, J.T.; Vilkman, V.A. Sampling theory for neuromagnetic detector arrays. IEEE Trans. Biomed. Eng. 1993, 40, 859. [Google Scholar] [CrossRef] [PubMed]
- Zetter, R.; Iivanainen, J.; Stenroos, M.; Parkkonen, L. Requirements for coregistration accuracy in on-scalp MEG. Brain Topogr. 2018, 31, 931–948. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boto, E.; Shah, V.; Hill, R.M.; Rhodes, N.; Osborne, J.; Doyle, C.; Holmes, N.; Rea, M.; Leggett, J.; Bowtell, R.; et al. Triaxial detection of the neuromagnetic field using optically-pumped magnetometry: Feasibility and application in children. NeuroImage 2022, 252, 119027. [Google Scholar] [CrossRef] [PubMed]
- Mellor, S.J.; Tierney, T.M.; O’Neill, G.C.; Alexander, N.; Seymour, R.A.; Holmes, N.; López, J.D.; Hill, R.M.; Boto, E.; Rea, M. Magnetic Field Mapping and Correction for Moving OP-MEG. IEEE Trans. Biomed. Eng. 2022, 69, 528–536. [Google Scholar] [CrossRef] [PubMed]
- Rea, M.; Holmes, N.; Hill, R.M.; Boto, E.; Leggett, J.; Edwards, L.J.; Woolger, D.; Dawson, E.; Shah, V.; Osborne, J.; et al. Precision magnetic field modelling and control for wearable magnetoencephalography. NeuroImage 2021, 241, 118401. [Google Scholar] [CrossRef] [PubMed]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iivanainen, J.; Borna, A.; Zetter, R.; Carter, T.R.; Stephen, J.M.; McKay, J.; Parkkonen, L.; Taulu, S.; Schwindt, P.D.D. Calibration and Localization of Optically Pumped Magnetometers Using Electromagnetic Coils. Sensors 2022, 22, 3059. https://doi.org/10.3390/s22083059
Iivanainen J, Borna A, Zetter R, Carter TR, Stephen JM, McKay J, Parkkonen L, Taulu S, Schwindt PDD. Calibration and Localization of Optically Pumped Magnetometers Using Electromagnetic Coils. Sensors. 2022; 22(8):3059. https://doi.org/10.3390/s22083059
Chicago/Turabian StyleIivanainen, Joonas, Amir Borna, Rasmus Zetter, Tony R. Carter, Julia M. Stephen, Jim McKay, Lauri Parkkonen, Samu Taulu, and Peter D. D. Schwindt. 2022. "Calibration and Localization of Optically Pumped Magnetometers Using Electromagnetic Coils" Sensors 22, no. 8: 3059. https://doi.org/10.3390/s22083059
APA StyleIivanainen, J., Borna, A., Zetter, R., Carter, T. R., Stephen, J. M., McKay, J., Parkkonen, L., Taulu, S., & Schwindt, P. D. D. (2022). Calibration and Localization of Optically Pumped Magnetometers Using Electromagnetic Coils. Sensors, 22(8), 3059. https://doi.org/10.3390/s22083059