
Rethinking Power Efficiency for Next-Generation Processor-Free Sensing Devices


Abstract
:1. Introduction
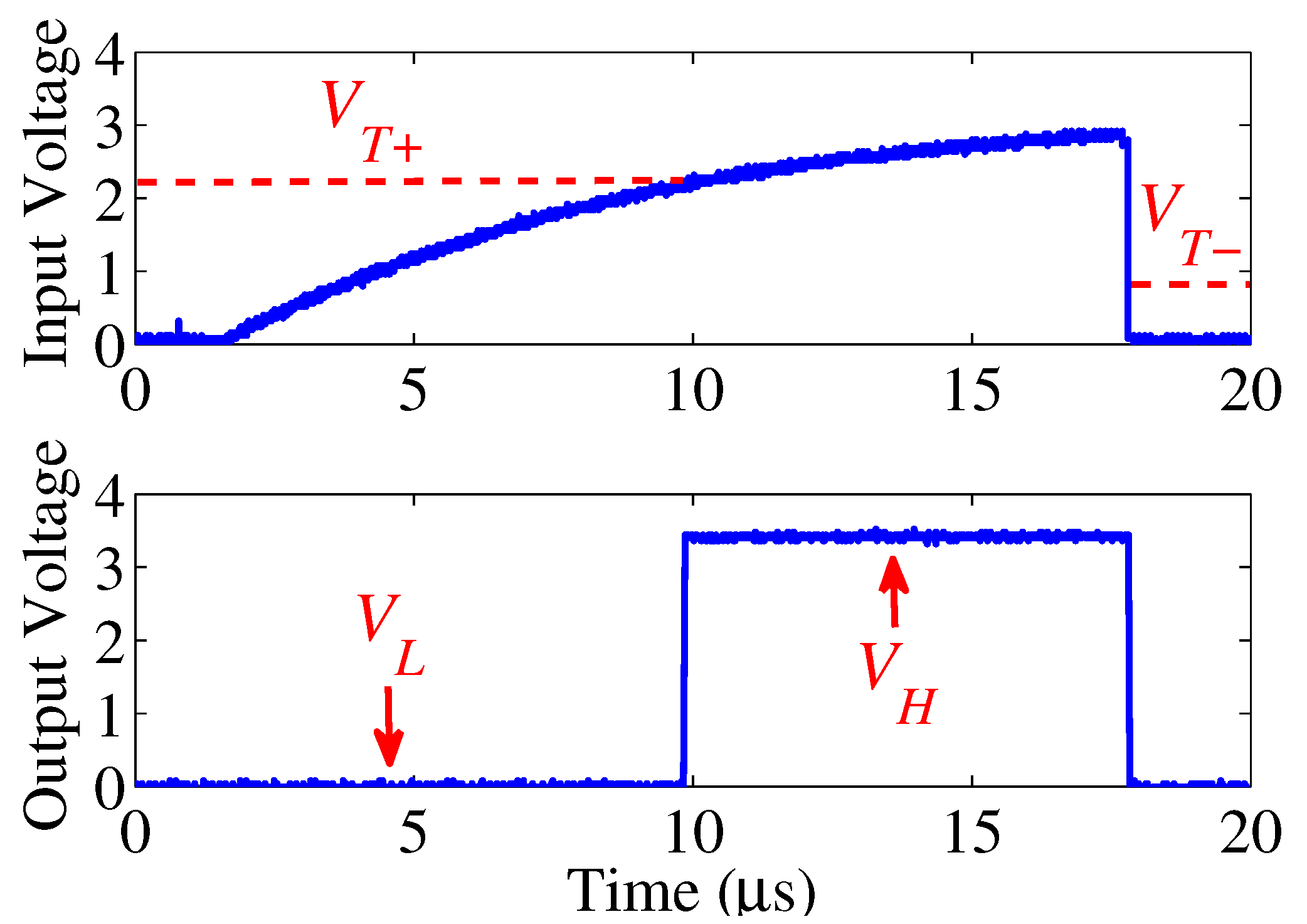
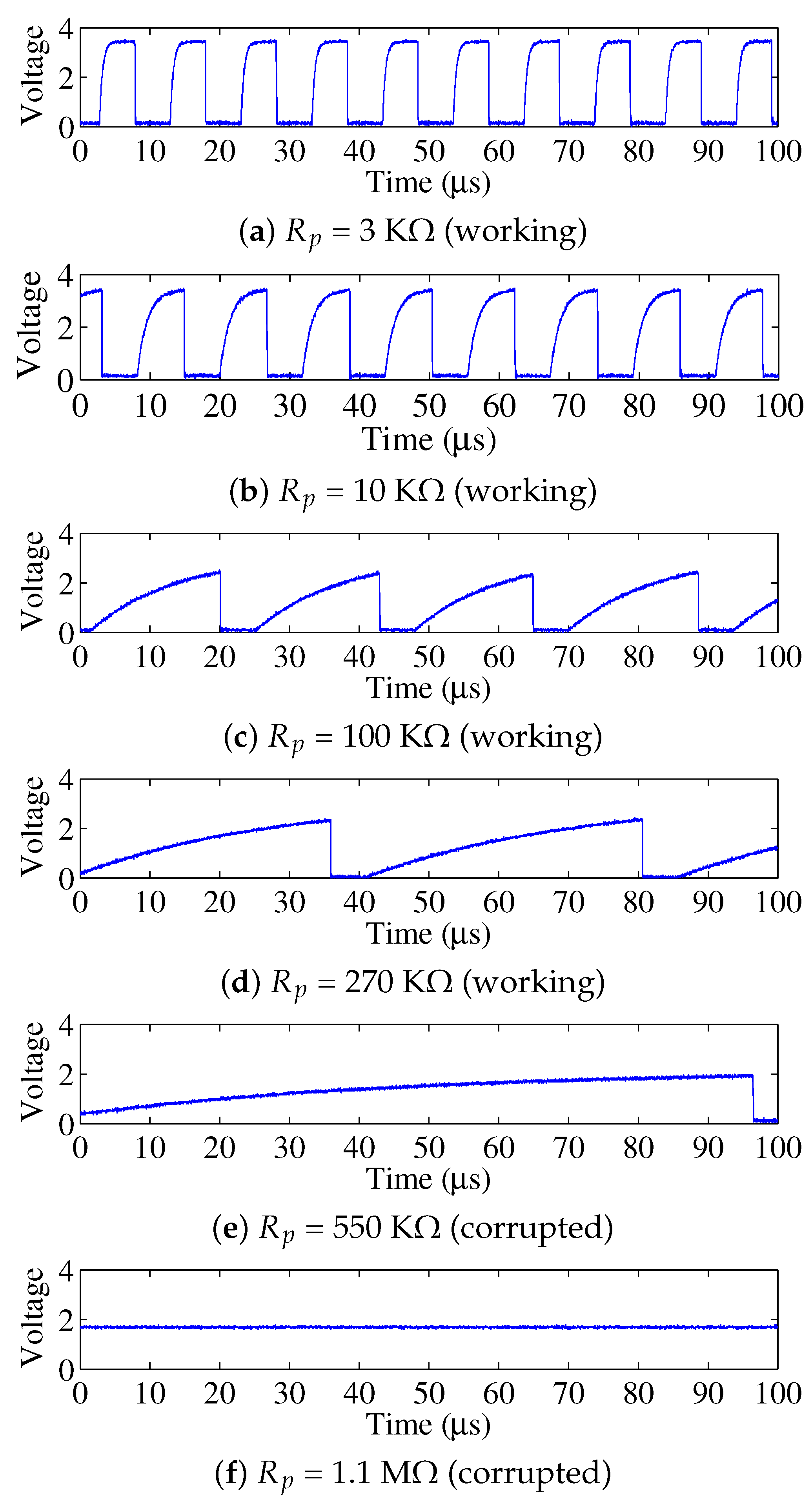
- First, the signal distortion becomes worse along with the increasing of resistance. Is the communication still robust with Turbo? At a certain resistor, the signal may not be effectively recovered by the waveshaping module so that IC communication fails. How to decide a resistance selection range in Turbo?
- Second, while the power consumption decreases along with the increasing of resistance, we observe that the communication data rate is reduced as well. Why does the data rate decrease? What is the relationship between the power consumption and the data rate and how to formulate it? How to select an adequate resistor value to make a trade-off between the power consumption and the data rate?
- First, we determine the effective resistance selection range (Section 3.1) by investigations to analyze the signal distortions over different resistances.
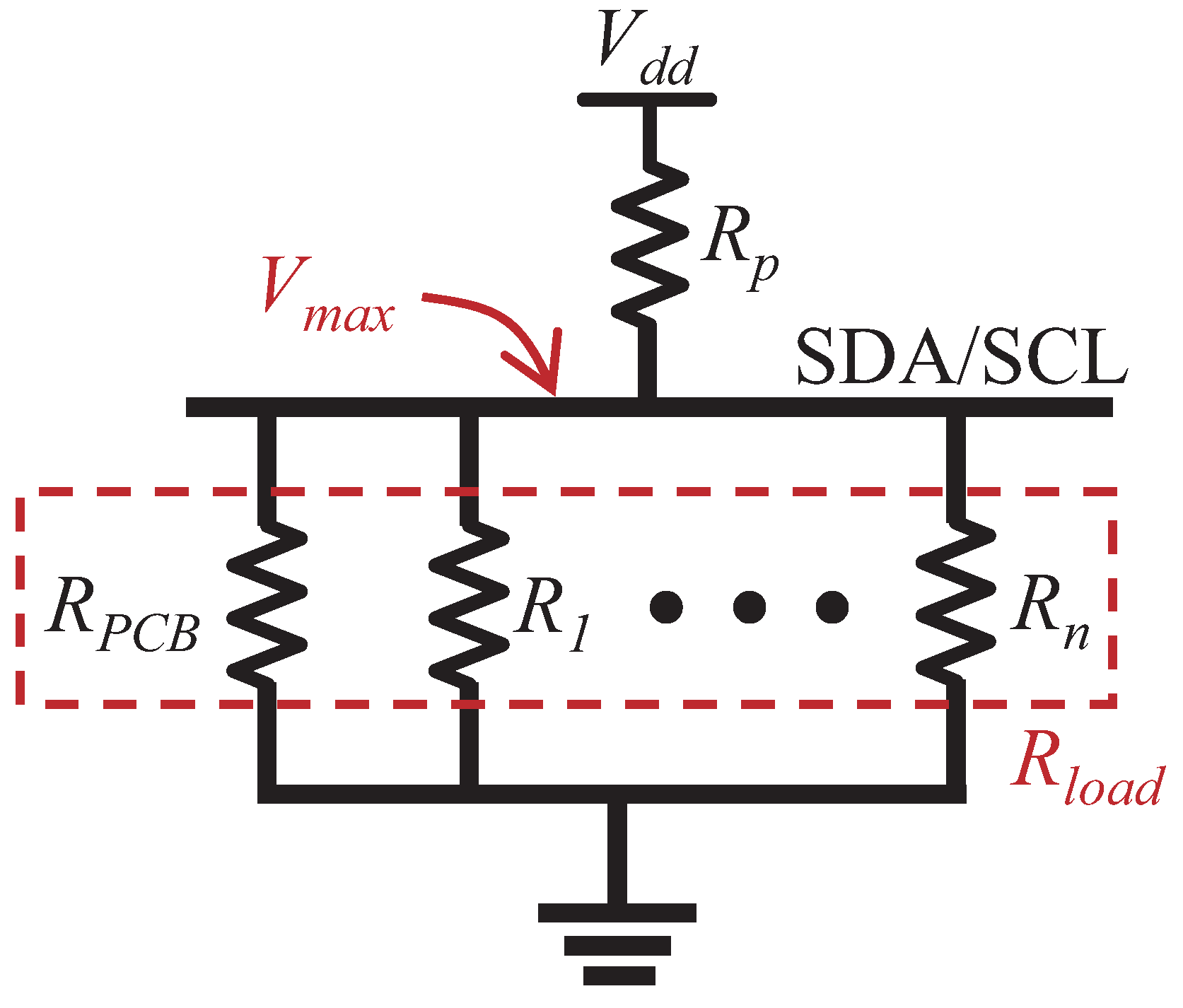
- Second, we build a physical signal model to describe the relationship between the power consumption (Section 3.3) and the data rate (Section 3.2). The model is based on a heuristic method and consider physical signal features. We also find the reason of the data rate reduction, i.e., the higher resistance incurs the increase of required time for each bit data transmission.
- Third, we formulate an optimal resistance problem (Section 3.4) to seek the best solution to reduce the power consumption as much as possible, meanwhile sacrificing the data rate as less as possible. At the optimal resistance, the bit energy budget is minimized in IC communication.
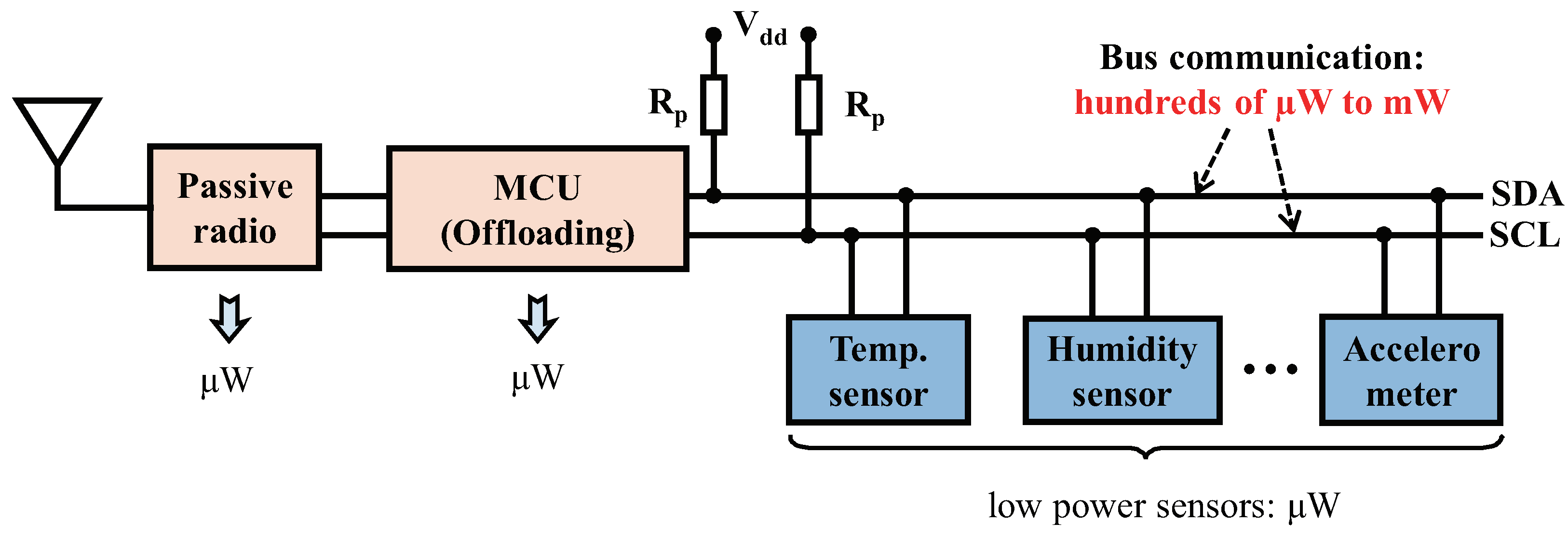
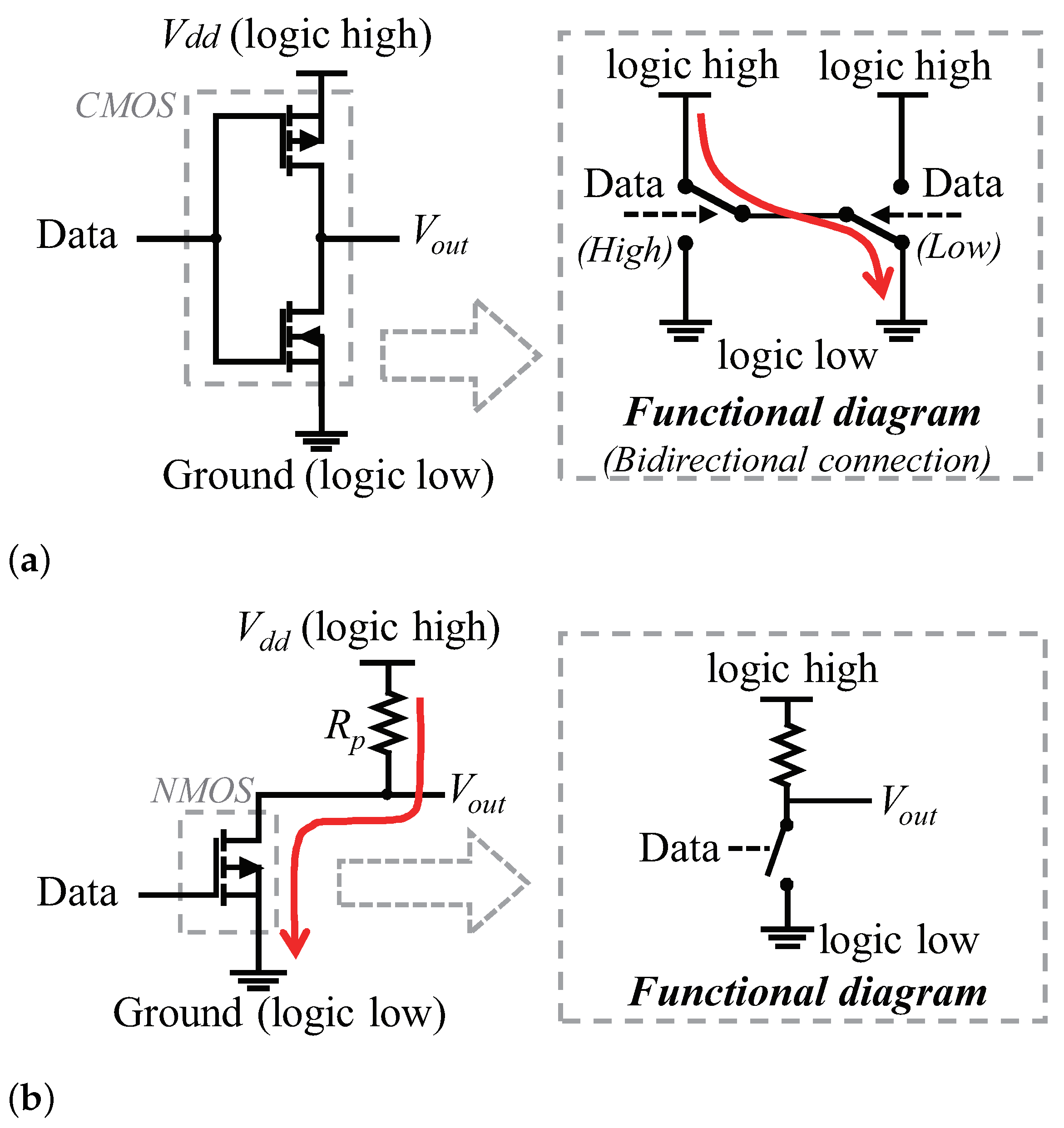
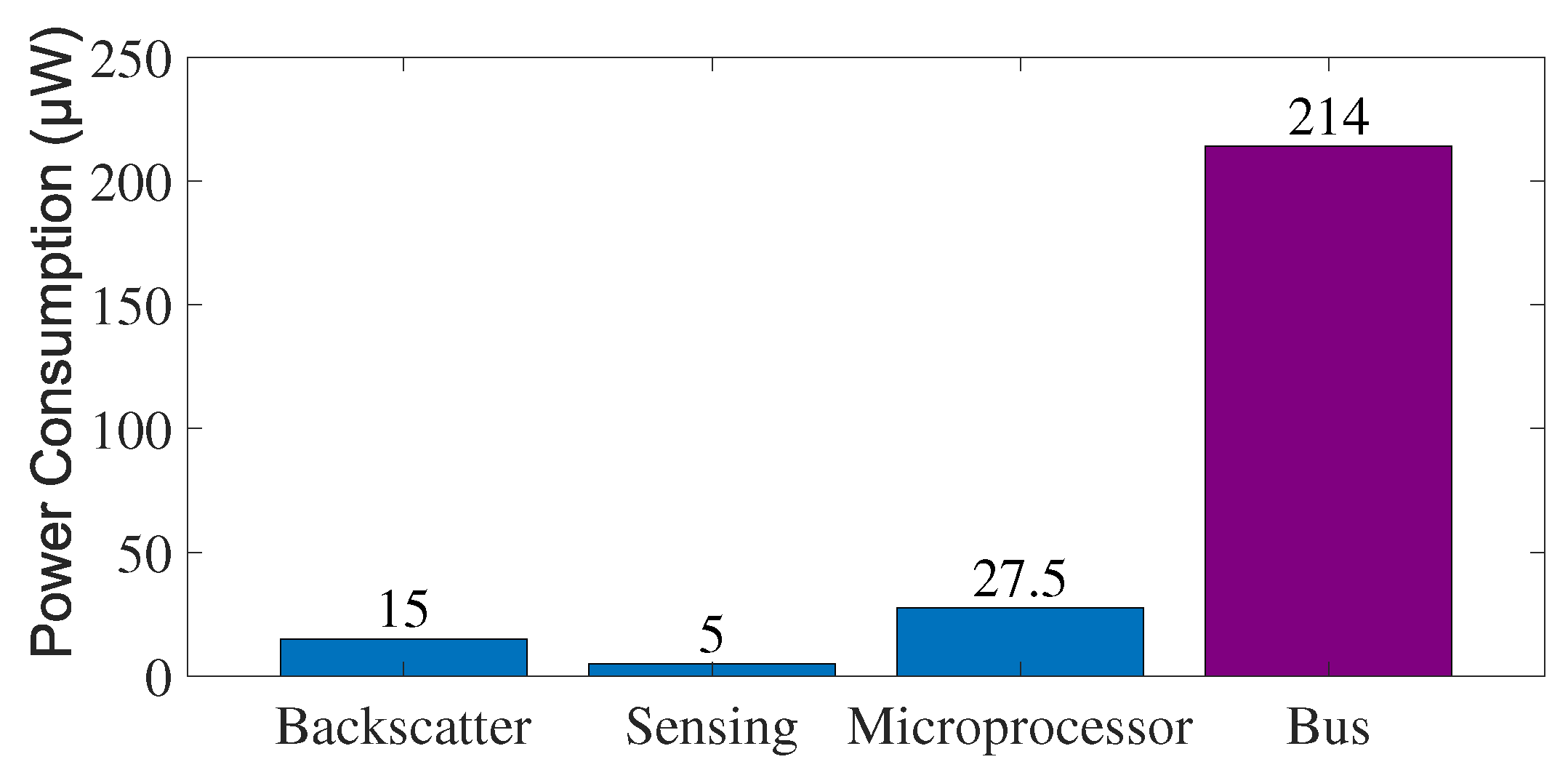
- We first point out the problem of high power consumption of open-drain bus communication, which is widely used in low-power sensing devices, and we propose the basic idea of reducing leakage current of the open-drain architecture to reduce the energy overhead.
- We propose technical solutions to the challenges hindering the realization of our basic idea, including signal distortion, and the reduction of data rate.
- We verify the feasibility and evaluate the performance of Turbo with both hardware prototype and simulation.
2. Preliminary
2.1. Background of Bus Architecture
2.2. Challenges of Turbo
3. Optimizing the Leakage Current
3.1. Resistance Selection Range
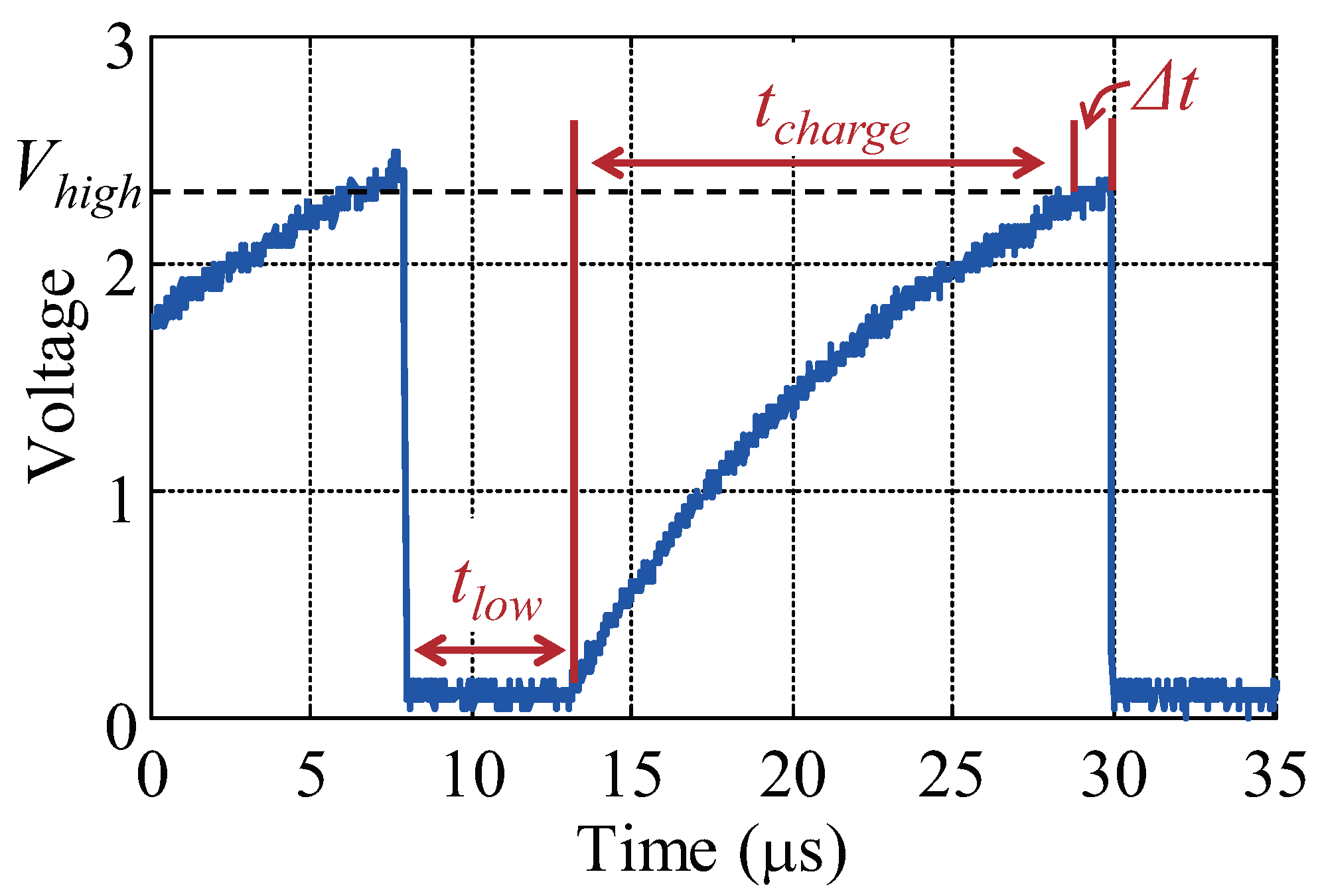
3.2. Data Rate Reduction
3.3. Building Signal Model
3.4. Optimal Resistance Problem
4. Implementation and Evaluation
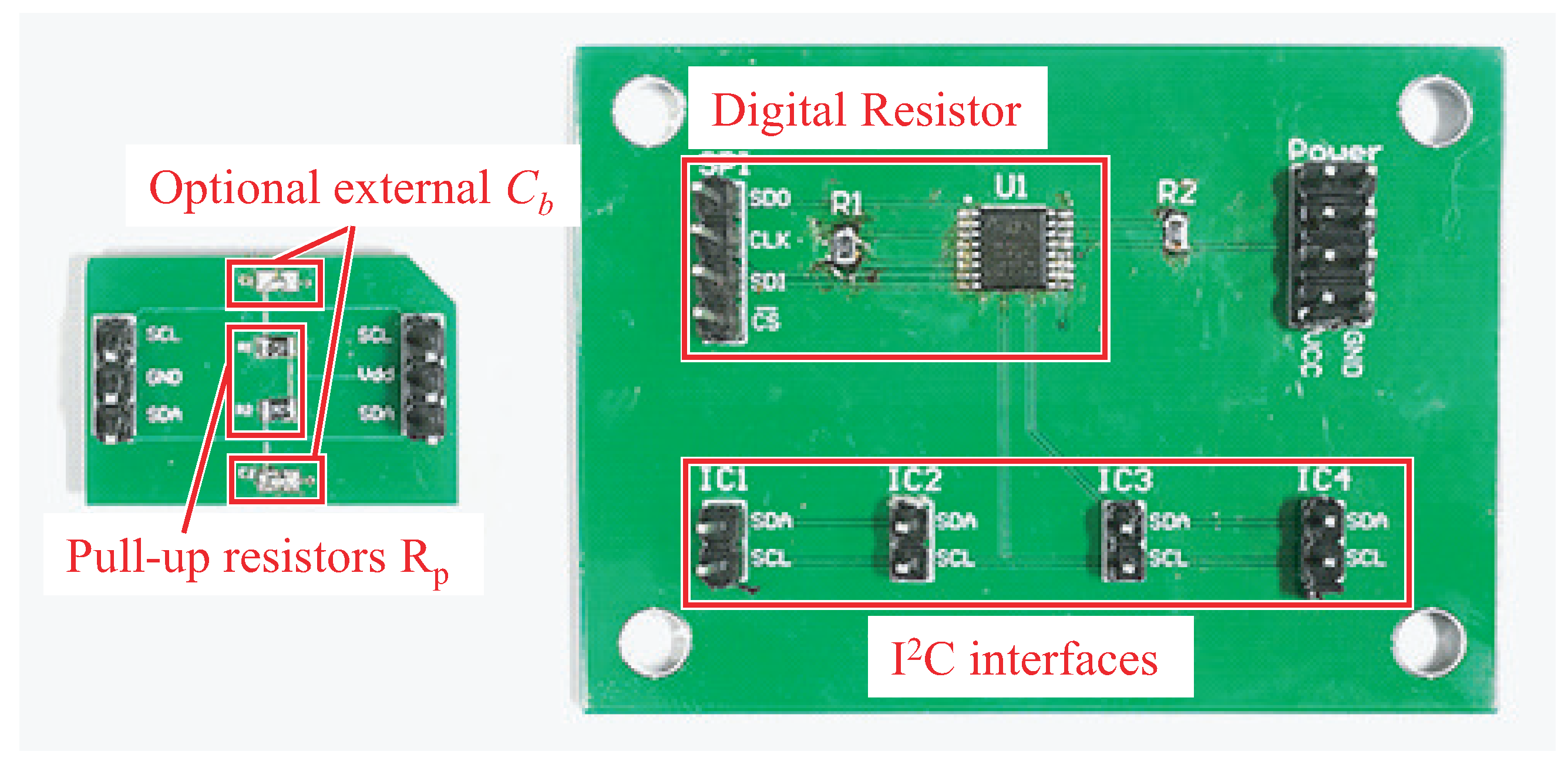
4.1. Implementation
4.2. Evaluation Overview
4.3. Quality of Communication
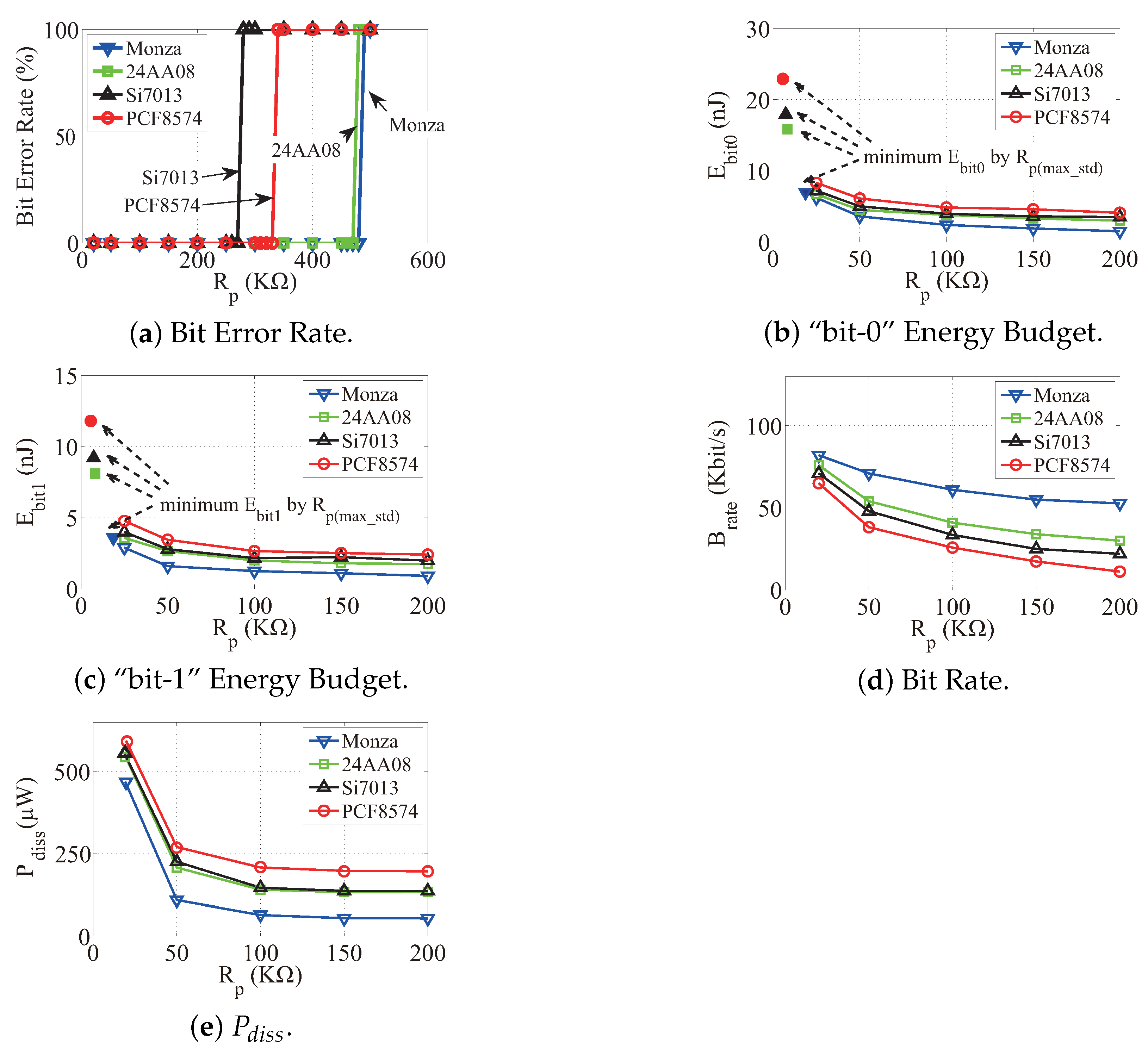
4.3.1. Bit Error Rate
4.3.2. Bit Energy Budget
4.3.3. Bit Rate
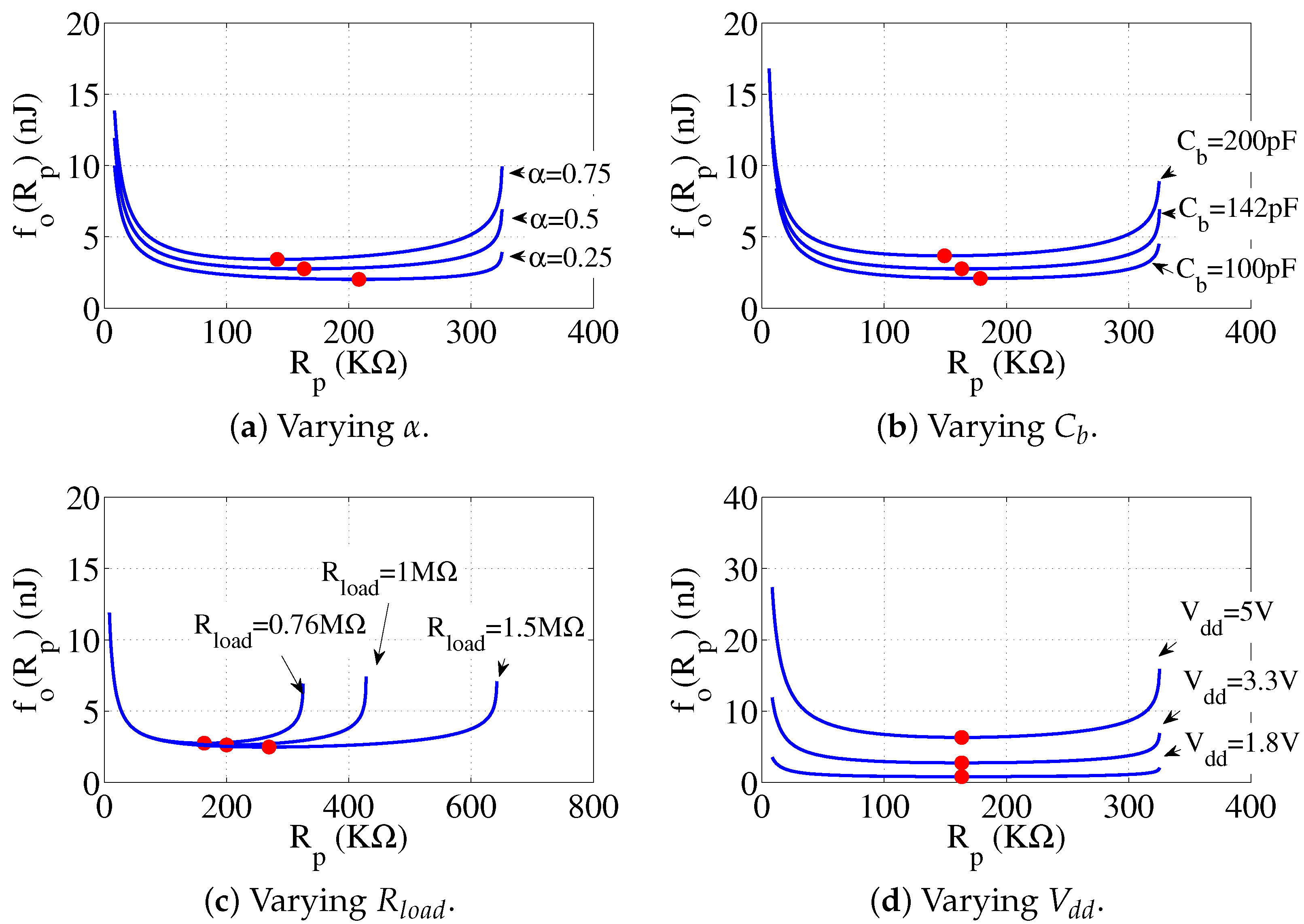
4.4. Optimal Resistance with Various Parameters
5. Discussion
6. Related Work
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| IoT | Internet of Things |
| COTS | Commercial Off-the-shelf |
| BER | Bit Error Rate |
| SPDT | Single-Pole Double-Throw |
| SPST | Single-Pole Single-Throw |
| TX | Transmit |
| RX | Receive |
| IC | Integrated Circuit |
| LED | Light-Emitting Diode |
References
- Salajegheh, M.; Clark, S.S.; Ransford, B.; Fu, K.; Juels, A. CCCP: Secure Remote Storage for Computational RFIDs. In Proceedings of the USENIX Security Symposium, Montreal, QC, Canada, 10–14 August 2009; pp. 215–230. [Google Scholar]
- Zhang, P.; Hu, P.; Pasikanti, V.; Ganesan, D. Ekhonet: High speed ultra low-power backscatter for next generation sensors. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014; pp. 557–568. [Google Scholar]
- Li, S.; Zhang, C.; Song, Y.; Zheng, H.; Liu, L.; Lu, L.; Li, M. Internet-of-microchips: Direct radio-to-bus communication with SPI backscatter. In Proceedings of the 26th Annual International Conference on Mobile Computing and Networking, London, UK, 21–25 September 2020; pp. 1–14. [Google Scholar]
- Devices, A. Analog Devices adxl362 Accelerometer Sensor. 2019. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/ADXL362.pdf (accessed on 12 March 2022).
- Varadharajan Idhaiam, K.S.; Caswell, J.A.; Pozo, P.D.; Sabolsky, K.; Sierros, K.A.; Reynolds, D.S.; Sabolsky, E.M. All-Ceramic Passive Wireless Temperature Sensor Realized by Tin-Doped Indium Oxide (ITO) Electrodes for Harsh Environment Applications. Sensors 2022, 22, 2165. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Wang, Y.; Ju, H.; Wang, Y.; Wang, Z.; Zhou, H. FarpScusn: Fully Anonymous Routing Protocol with Self-Healing Capability in Unstable Sensor Networks. Sensors 2020, 20, 6683. [Google Scholar] [CrossRef] [PubMed]
- Kellogg, B.; Talla, V.; Gollakota, S.; Smith, J.R. Passive Wi-Fi: Bringing Low Power to Wi-Fi Transmissions. In Proceedings of the 13th Usenix Conference on Networked Systems Design and Implementation, NSDI’16, Santa Clara, CA, USA, 16–18 March 2016; pp. 151–164. [Google Scholar]
- Kellogg, B.; Parks, A.; Gollakota, S.; Smith, J.R.; Wetherall, D. Wi-Fi Backscatter: Internet Connectivity for RF-Powered Devices. In Proceedings of the 2014 ACM Conference on SIGCOMM, SIGCOMM ’14, Chicago, IL, USA, 17–22 August 2014; Association for Computing Machinery: New York, NY, USA, 2014; pp. 607–618. [Google Scholar] [CrossRef]
- Laboratories, S. Smbus Communication for Small Form Factor Device Families. 2013. Available online: https://www.silabs.com/documents/public/application-notes/an141.pdf (accessed on 12 March 2022).
- Semiconductor, F. SMBus Quick Start Guide. 2013. Available online: https://www.nxp.com.cn/docs/en/application-note/AN4471.pdf (accessed on 12 March 2022).
- Sample, A.P.; Yeager, D.J.; Powledge, P.S.; Mamishev, A.V.; Smith, J.R. Design of an RFID-based battery-free programmable sensing platform. IEEE Trans. Instrum. Meas. 2008, 57, 2608–2615. [Google Scholar]
- Schmitt Trigger. 2018. Available online: https://en.wikipedia.org/wiki/Schmitt_trigger (accessed on 10 July 2018).
- Higgins, R.J. Electronics with Digital and Analog Integrated Circuits; Prentice-Hall: Hoboken, NJ, USA, 1983. [Google Scholar]
- Bistable Multivibrator. 2018. Available online: https://en.wikipedia.org/wiki/Multivibrator (accessed on 10 July 2018).
- Wikipedia. Flip-Flop (Electronics). 2019. Available online: https://en.wikipedia.org/wiki/Flip-flop_(electronics) (accessed on 10 May 2019).
- Impinj. Monza X-2K Dura. 2016. Available online: https://support.impinj.com/hc/en-us/articles/202756848-Monza-X-2K-Dura-Datasheet (accessed on 12 March 2022).
- Technology, M. 8K I2C Serial EEPROM. 2003. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/21710c.pdf (accessed on 12 March 2022).
- Instruments, T. MSP430F2132 Datasheet. 2012. Available online: http://www.ti.com.cn/cn/lit/ds/symlink/msp430f2132.pdf (accessed on 12 March 2022).
- MathWorks, I. Fminbnd Function Description. 2018. Available online: https://www.mathworks.com/help/matlab/ref/fminbnd.html (accessed on 25 December 2018).
- Devices, A. 1-/2-Channel 15 V Digital Potentiometer. 2010. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/AD5260_5262.pdf (accessed on 12 March 2022).
- Instruments, T. PCF8574 Remote 8-Bit I/O Expander for I2C Bus. 2015. Available online: http://www.ti.com/lit/ds/symlink/pcf8574.pdf (accessed on 12 March 2022).
- Labs, S. Humidity and Temperature Sensor. 2016. Available online: https://www.silabs.com/documents/public/data-sheets/Si7013-A20.pdf (accessed on 12 March 2022).
- Instruments, T. MSP430FR5969 Datasheet. 2018. Available online: http://www.ti.com/lit/ds/symlink/msp430fr5969.pdf (accessed on 12 March 2022).
- Liu, V.; Parks, A.; Talla, V.; Gollakota, S.; Wetherall, D.; Smith, J.R. Ambient Backscatter: Wireless Communication out of Thin Air. In Proceedings of the ACM SIGCOMM 2013 Conference on SIGCOMM, SIGCOMM ’13, Hong Kong, China, 12–16 August 2013; Association for Computing Machinery: New York, NY, USA, 2013; pp. 39–50. [Google Scholar] [CrossRef]
- Shafik, R.; Yakovlev, A.; Das, S. Real-Power Computing. IEEE Trans. Comput. 2018, 67, 1445–1461. [Google Scholar] [CrossRef]
- Balsamo, D.; Das, A.; Weddell, A.S.; Brunelli, D.; Al-Hashimi, B.M.; Merrett, G.V.; Benini, L. Graceful performance modulation for power-neutral transient computing systems. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2016, 35, 738–749. [Google Scholar] [CrossRef] [Green Version]
- Balsamo, D.; Weddell, A.S.; Das, A.; Arreola, A.R.; Brunelli, D.; Al-Hashimi, B.M.; Merrett, G.V.; Benini, L. Hibernus++: A self-calibrating and adaptive system for transiently-powered embedded devices. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2016, 35, 1968–1980. [Google Scholar] [CrossRef] [Green Version]
- Kansal, A.; Hsu, J.; Zahedi, S.; Srivastava, M.B. Power management in energy harvesting sensor networks. ACM Trans. Embed. Comput. Syst. TECS 2007, 6, 32. [Google Scholar] [CrossRef]
- Li, S.; Lu, L.; Hussain, M.J.; Ye, Y.; Zhu, H. Sentinel: Breaking the Bottleneck of Energy Utilization Efficiency in RF-Powered Devices. IEEE Internet Things J. 2018, 6, 705–717. [Google Scholar] [CrossRef]
- Buettner, M.; Greenstein, B.; Wetherall, D. Dewdrop: An energy-aware runtime for computational RFID. In Proceedings of the Symposium on Networked, Systems Design and Implementation, USENIX NSDI, Boston, MA, USA, 30 March–1 April 2011; pp. 197–210. [Google Scholar]
- Zhang, P.; Ganesan, D. Enabling Bit-by-Bit Backscatter Communication in Severe Energy Harvesting Environments. In Proceedings of the 11th USENIX Conference on Networked Systems Design and Implementation, NSDI’14, Seattle, WA, USA, 2–4 April 2014; USENIX Association: Berkeley, CA, USA, 2014; pp. 345–357. [Google Scholar]
- Alliance, M. I3C Bus Specification. 2020. Available online: https://www.mipi.org/specifications/i3c-sensor-specification (accessed on 12 March 2022).
- StackOverflow. What Happens If I Omit the Pullup Resistors on I2C Lines? 2014. Available online: https://electronics.stackexchange.com/questions/102611/what-happens-if-i-omit-the-pullup-resistors-on-i2c-lines (accessed on 20 July 2018).
- Friesel, D.; Spinczyk, O. I2C considered wasteful: Saving energy with host-controlled pull-up resistors. In Proceedings of the 18th International Conference on Information Processing in Sensor Networks, Montreal, QC, Canada, 16–18 April 2019; pp. 315–316. [Google Scholar]
- Jones, N. Lowering Power Consumption Tip 1—Avoid Zeros on the I2C Bus. 2009. Available online: https://embeddedgurus.com/stack-overflow/2009/07/lowering-power-consumption-tip-1-avoid-zeros-on-the-i2c-bus/ (accessed on 20 July 2018).
- Stan, M.R.; Burleson, W.P. Bus-invert coding for low-power I/O. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 1995, 3, 49–58. [Google Scholar] [CrossRef] [Green Version]
- Circuits, D. Effects of Varying I2C Pull-Up Resistors. 2010. Available online: http://dsscircuits.com/index.php/articles/47-effects-of-varying-i2c-pull-up-resistors (accessed on 20 July 2018).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test IC | • Monza [16] | • 24AA08 [17] | ∘ PCF8574 [21] | ∘ Si7013 [22] | |
|---|---|---|---|---|---|
| Standard | 18.7 K | 8.3 K | 5.7 K | 7.3 K | |
| 7 nJ | 15.8 nJ | 22.9 nJ | 17.9 nJ | ||
| 3.6 nJ | 8.1 nJ | 11.8 nJ | 9.2 nJ | ||
| 90.9 Kbit/s | 90.9 Kbit/s | 90.9 Kbit/s | 90.9 Kbit/s | ||
| Turbo | optimal | 200 K | 163.4 K | 148 K | 158.1 K |
| 2.2 nJ | 4.1 nJ | 5.6 nJ | 4.6 nJ | ||
| 0.7 nJ | 1.4 nJ | 1.9 nJ | 1.5 nJ | ||
| 52.7 Kbit/s | 33.4 Kbit/s | 17.6 Kbit/s | 25.1 Kbit/s | ||
| 3.3 V | 100 KHz | 142 pF | 0.76 M | 0.5 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Li, S.; Zhang, C.; Li, S.; Lu, L. Rethinking Power Efficiency for Next-Generation Processor-Free Sensing Devices. Sensors 2022, 22, 3074. https://doi.org/10.3390/s22083074
Song Y, Li S, Zhang C, Li S, Lu L. Rethinking Power Efficiency for Next-Generation Processor-Free Sensing Devices. Sensors. 2022; 22(8):3074. https://doi.org/10.3390/s22083074
Chicago/Turabian StyleSong, Yihang, Songfan Li, Chong Zhang, Shengyu Li, and Li Lu. 2022. "Rethinking Power Efficiency for Next-Generation Processor-Free Sensing Devices" Sensors 22, no. 8: 3074. https://doi.org/10.3390/s22083074
APA StyleSong, Y., Li, S., Zhang, C., Li, S., & Lu, L. (2022). Rethinking Power Efficiency for Next-Generation Processor-Free Sensing Devices. Sensors, 22(8), 3074. https://doi.org/10.3390/s22083074