
Automatic Implementation Algorithm of Pressure Relief Drilling Depth Based on an Innovative Monitoring-While-Drilling Method


Abstract
:1. Introduction
- (1)
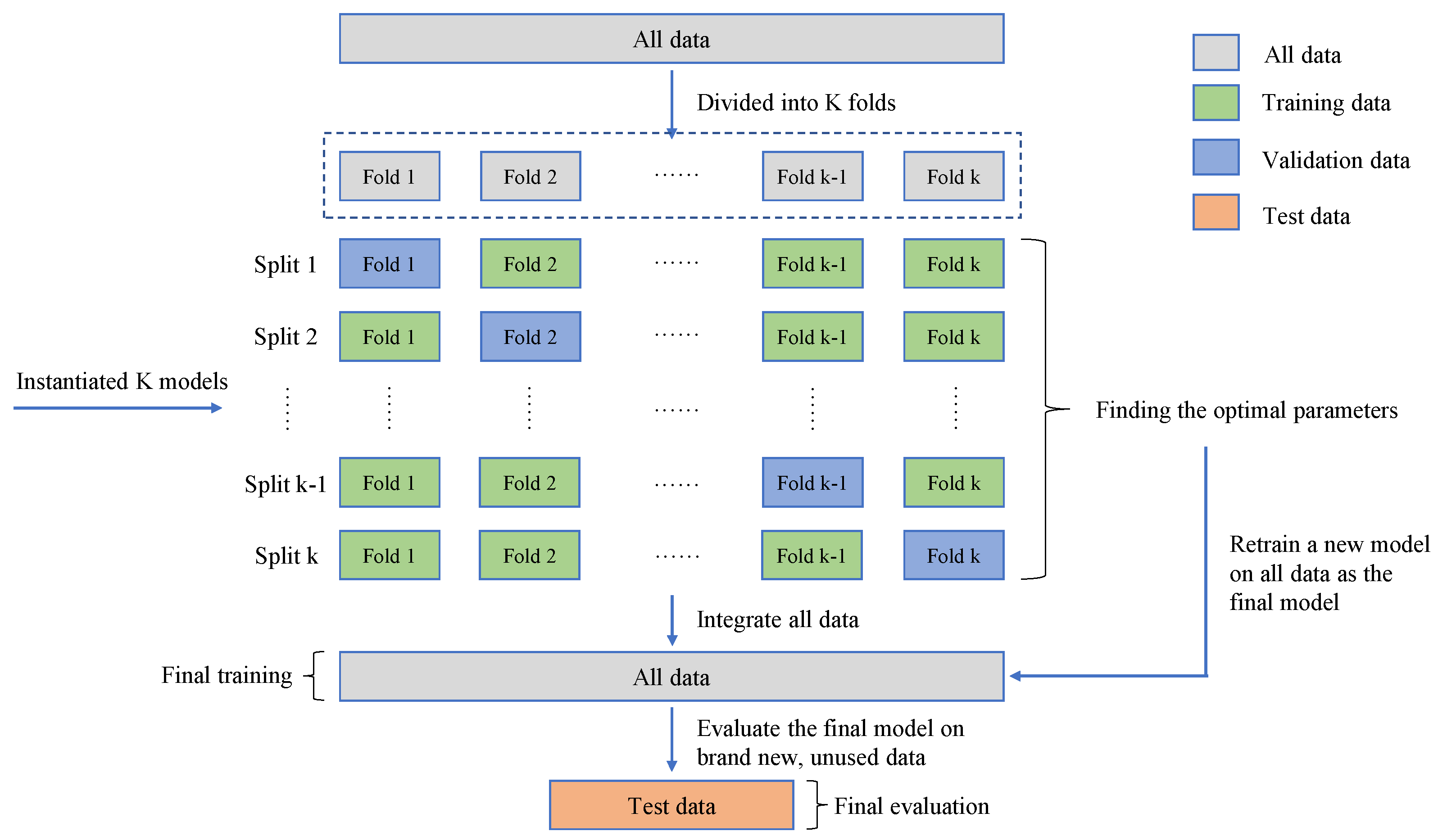
- Divide all data into the training set, validation set and test set. The test set is not involved in the training and tuning of the neural network and is only used as the data for the final model effect evaluation to avoid the problem of information leakage that leads to the fake high identification accuracy of the neural network. The training and validation sets are divided by the stratified K-fold cross-validation method to find the optimal hyperparameters in the model training and tuning, which eliminates the influence of the imbalanced amount of data between the two categories on the model.
- (2)
- An efficient, automatic and precise neural network model is proposed to identify the drilling status of drilling rigs by drilling amplitude signals, which can fuse the data from single and multiple sensors, and the identification results from different neural networks.
- (3)
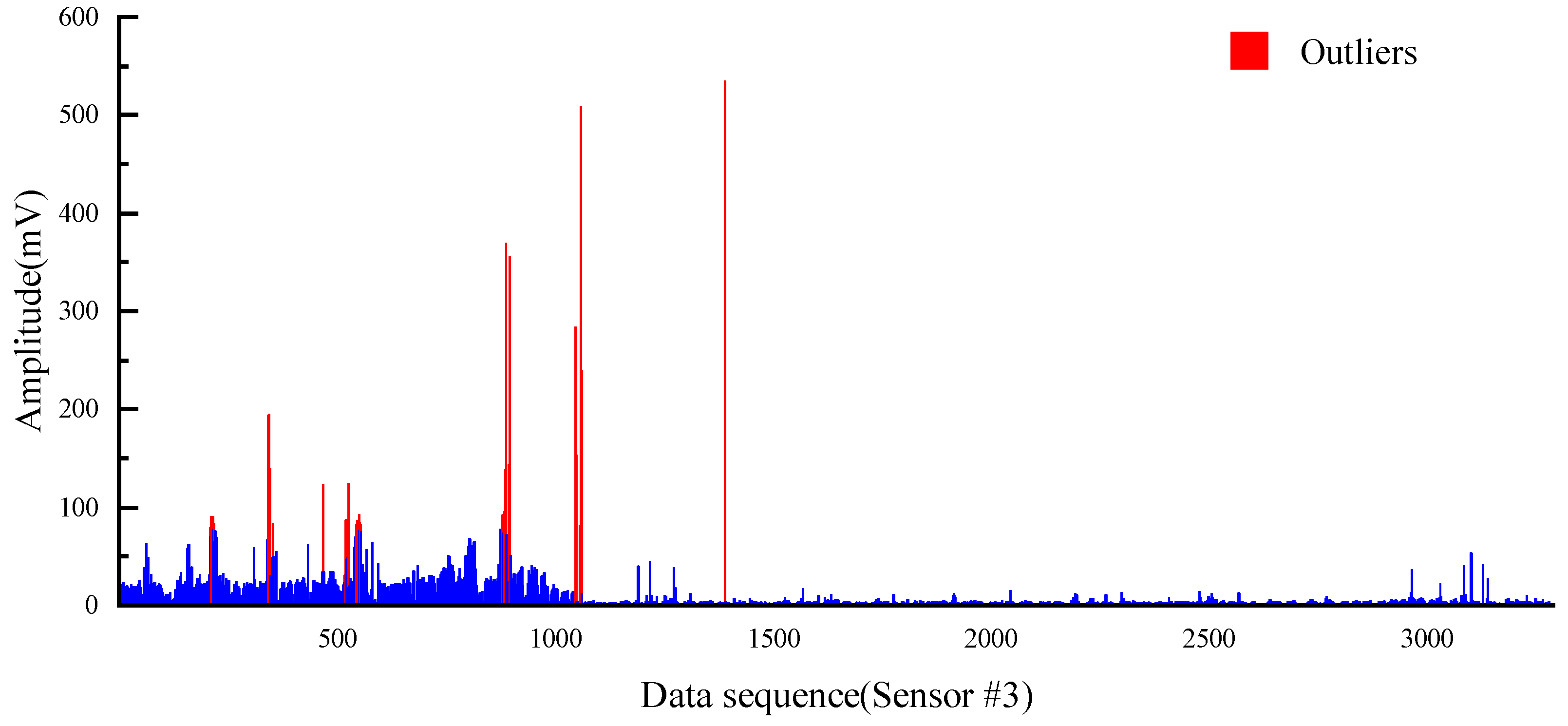
- An optimization method is presented, which is similar to “submerge” for two types of recognition anomalies caused by data in drilling state recognition by the neural network identification algorithm.
2. Research Methods
2.1. Data Collection Method
2.2. Neural Network Algorithm
3. Design of Experiment
3.1. Composition of Experimental Data
3.2. Pre-Processing of Experimental Data
3.3. Drilling State Identification Neural Network
4. Analysis and Discussion of the Experimental Results
4.1. Analysis of the Experimental Results
4.2. Error Analysis
5. Conclusions and Future Work
5.1. Conclusions
- (1)
- A high-accuracy neural network algorithm for the automatic identification of the drilling status of drilling rigs was proposed. The method uses single-sensor and multi-sensor data from the same borehole as input data and fuses the identification results from different types of sub-neural networks using different inputs, effectively improving the final identification accuracy. The identification accuracy of four test datasets of borehole amplitude data from two different mines were all above 97.00%.
- (2)
- An optimization method was proposed to deal with two types of misjudgment in the identification results due to data anomalies, and the optimized identification results are almost the same as the drilling status marked manually according to the actual construction status on-site.
5.2. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fan, X.; Liang, M.; Yeap, T. A joint time-invariant wavelet transform and kurtosis approach to the improvement of in-line oil debris sensor capability. Smart Mater. Struct. 2009, 18, 085010. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, L.; Liao, J.; Wang, W.; Liu, Q.; Tang, L. Experimental study of fracture toughness and subcritical crack growth of three rocks under different environments. Int. J. Geomech. 2020, 20, 04020128. [Google Scholar] [CrossRef]
- Wang, K.; Liu, Z.; Liu, G.; Yi, L.; Yang, K.; Peng, S.; Chen, M. Vibration Sensor Approaches for the Monitoring of Sand Production in Bohai Bay. Shock. Vib. 2015, 2015, 591780. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, Y.; Wang, W.; Tang, L.; Liu, Q.; Cheng, G. Modeling of rheological fracture behavior of rock cracks subjected to hydraulic pressure and far field stresses. Theor. Appl. Fract. Mech. 2019, 101, 59–66. [Google Scholar] [CrossRef]
- Feng, K.; Jiang, Z.; He, W.; Qin, Q. Rolling element bearing fault detection based on optimal antisymmetric real Laplace wavelet. Measurement 2011, 44, 1582–1591. [Google Scholar] [CrossRef]
- Sheen, Y.-T. An envelope detection method based on the first-vibration-mode of bearing vibration. Measurement 2008, 41, 797–809. [Google Scholar] [CrossRef]
- Baydar, N.; Ball, A. Detection of Gear Failures Via Vibration and Acoustic Signals Using Wavelet Transform. Mech. Syst. Signal Processing 2003, 17, 787–804. [Google Scholar] [CrossRef]
- Singh, A.; Parey, A. Gearbox fault diagnosis under non-stationary conditions with independent angular re-sampling technique applied to vibration and sound emission signals. Appl. Acoust. 2019, 144, 11–22. [Google Scholar] [CrossRef]
- Li, C.; Liang, M. Time–frequency signal analysis for gearbox fault diagnosis using a generalized synchrosqueezing transform. Mech. Syst. Signal Processing 2012, 26, 205–217. [Google Scholar] [CrossRef]
- Yu, X.; Feng, Z.; Liang, M. Analytical vibration signal model and signature analysis in resonance region for planetary gearbox fault diagnosis. J. Sound Vib. 2021, 498, 115962. [Google Scholar] [CrossRef]
- Fei, C.W.; Bai, G.C. Wavelet correlation feature scale entropy and fuzzy support vector machine approach for aeroengine whole-body vibration fault diagnosis. Shock. Vib. 2013, 20, 341–349. [Google Scholar] [CrossRef]
- Wang, S.; Chen, X.; Tong, C.; Zhao, Z. Matching Synchrosqueezing Wavelet Transform and Application to Aeroengine Vibration Monitoring. IEEE Trans. Instrum. Meas. 2017, 66, 360–372. [Google Scholar] [CrossRef]
- Koukoura, S.; Carroll, J.; McDonald, A.; Weiss, S. Comparison of wind turbine gearbox vibration analysis algorithms based on feature extraction and classification. Iet Renew. Power Gener. 2019, 13, 2549–2557. [Google Scholar] [CrossRef]
- Chen, J.; Yue, Z.Q. Weak zone characterization using full drilling analysis of rotary-percussive instrumented drilling. Int. J. Rock Mech. Min. Sci. 2016, 89, 227–234. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, L.; Wang, W.; Liu, Q.; Tang, L.; Cheng, G. Experimental study on shear behavior and a revised shear strength model for infilled rock joints. Int. J. Geomech. 2020, 20, 04020141. [Google Scholar] [CrossRef]
- Chen, J.; Yue, Z.Q. Ground characterization using breaking-action-based zoning analysis of rotary-percussive instrumented drilling. Int. J. Rock Mech. Min. Sci. 2015, 75, 33–43. [Google Scholar] [CrossRef]
- Qin, M.; Wang, K.; Pan, K.; Sun, T.; Liu, Z. Analysis of signal characteristics from rock drilling based on vibration and acoustic sensor approaches. Appl. Acoust. 2018, 140, 275–282. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, C.; Wang, Y.; Lin, H. Shear-related roughness classification and strength model of natural rock joint based on fuzzy comprehensive evaluation. Int. J. Rock Mech. Min. Sci. 2021, 137, 104550. [Google Scholar] [CrossRef]
- Zhang, W.; Ma, N.; Ren, J.; Li, C. Peak particle velocity of vibration events in underground coal mine and their caused stress increment. Measurement 2021, 169, 108520. [Google Scholar] [CrossRef]
- Cheng, T.; Zhang, Z.; Yi, Q.; Yin, B.; Yuan, H. Denoising method of rock acoustic emission signal based on improved VMD. J. Min. Strat. Control. Eng. 2022, 4, 023011. [Google Scholar]
- Lan, S.; Song, D.; Li, Z.; Liu, Y. Experimental study on acoustic emission characteristics of fault slip process based on damage factor. J. Min. Strat. Control. Eng. 2021, 3, 033024. [Google Scholar]
- Wu, Y.; Dong, Q.; He, J. The Effect of Chemical Corrosion on Mechanics and Failure Behaviour of Limestone Containing a Single Kinked Fissure. Sensors 2021, 21, 5641. [Google Scholar] [CrossRef] [PubMed]
- Dong, L.; Tong, X.; Hu, Q.; Tao, Q. Empty region identification method and experimental verification for the two-dimensional complex structure. Int. J. Rock Mech. Min. Sci. 2021, 147, 104885. [Google Scholar] [CrossRef]
- Suwansin, W.; Phasukkit, P. Deep Learning-Based Acoustic Emission Scheme for Nondestructive Localization of Cracks in Train Rails under a Load. Sensors 2021, 21, 272. [Google Scholar] [CrossRef] [PubMed]
- Dong, L.; Zhang, Y.; Sun, D.; Chen, Y.; Tang, Z. Stage characteristics of acoustic emission and identification of unstable crack state for granite fractures. Chin. J. Rock Mech. Eng. 2022, 41, 120–131. [Google Scholar]
- Dong, L.; Tong, X.; Ma, J. Quantitative Investigation of Tomographic Effects in Abnormal Regions of Complex Structures. Engineering 2021, 7, 1011–1022. [Google Scholar] [CrossRef]
- Su, Y.; Dong, L.; Pei, Z. Non-Destructive Testing for Cavity Damages in Automated Machines Based on Acoustic Emission Tomography. Sensors 2022, 22, 2201. [Google Scholar] [CrossRef]
- Hatherly, P.; Leung, R.; Scheding, S.; Robinson, D. Drill monitoring results reveal geological conditions in blasthole drilling. Int. J. Rock Mech. Min. Sci. 2015, 78, 144–154. [Google Scholar] [CrossRef]
- Ghosh, R.; Schunnesson, H.; Gustafson, A. Monitoring of Drill System Behavior for Water-Powered In-The-Hole (ITH) Drilling. Minerals 2017, 7, 121. [Google Scholar] [CrossRef] [Green Version]
- Ma, K.; Wang, S.-J.; Yuan, F.-Z.; Peng, Y.-L.; Jia, S.-M.; Gong, F. Study on Mechanism of Influence of Mining Speed on Roof Movement Based on Microseismic Monitoring. Adv. Civ. Eng. 2020, 2020, 8819824. [Google Scholar] [CrossRef]
- Li, D.; Zhang, J. Rockburst Monitoring in Deep Coalmines with Protective Coal Panels Using Integrated Microseismic and Computed Tomography Methods. Shock. Vib. 2020, 2020, 8831351. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, C.; Bi, J. Analysis of fractured rock permeability evolution under unloading conditions by the model of elastoplastic contact between rough surfaces. Rock Mech. Rock Eng. 2020, 53, 5795–5808. [Google Scholar] [CrossRef]
- Jiang, R.; Dai, F.; Liu, Y.; Li, A. A novel method for automatic identification of rock fracture signals in microseismic monitoring. Measurement 2021, 175, 109129. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; Jin, J.; Qu, X.; Fan, S.; Xin, C. A new monitoring-while-drilling method of large diameter drilling in underground coal mine and their application. Measurement 2021, 173, 108840. [Google Scholar] [CrossRef]
- Zhang, C.; Tu, S.; Chen, M.; Zhang, L. Pressure-relief and methane production performance of pressure relief gas extraction technology in the longwall mining. J. Geophys. Eng. 2017, 14, 77–89. [Google Scholar] [CrossRef] [Green Version]
- Zhou, H.; Hatherly, P.; Monteiro, S.T.; Ramos, F.; Oppolzer, F.; Nettleton, E.; Scheding, S. Automatic rock recognition from drilling performance data. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3407–3412. [Google Scholar]
- Liu, S.; Fu, M.; Jia, H.; Li, W.; Luo, Y. Numerical simulation and analysis of drill rods vibration during roof bolt hole drilling in underground mines. Int. J. Min. Sci. Technol. 2018, 28, 877–884. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; Ren, J.; Wu, Z. Measurement and application of vibration signals during pressure relief hole construction using microseismic system. Measurement 2020, 158, 107696. [Google Scholar] [CrossRef]
- Pu, Y.; Apel, D.B.; Hall, R. Using machine learning approach for microseismic events recognition in underground excavations: Comparison of ten frequently-used models. Eng. Geol. 2020, 268, 105519. [Google Scholar] [CrossRef]
- Shirani Faradonbeh, R.; Taheri, A. Long-term prediction of rockburst hazard in deep underground openings using three robust data mining techniques. Eng. Comput. 2018, 35, 659–675. [Google Scholar] [CrossRef]
- Feng, S.; Zhou, H.Y.; Dong, H.B. Using deep neural network with small dataset to predict material defects. Mater. Des. 2019, 162, 300–310. [Google Scholar] [CrossRef]
- Yang, Y.L.; Fu, P.Y.; He, Y.C. Bearing Fault Automatic Classification Based on Deep Learning. Ieee Access 2018, 6, 71540–71554. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, G.; Liu, C.; Chen, X.H. Study on planetary gear fault diagnosis based on variational mode decomposition and deep neural networks. Measurement 2018, 130, 94–104. [Google Scholar] [CrossRef]
- Zhang, R.; Peng, Z.; Wu, L.F.; Yao, B.B.; Guan, Y. Fault Diagnosis from Raw Sensor Data Using Deep Neural Networks Considering Temporal Coherence. Sensors 2017, 17, 549. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Si, X.S.; Hu, C.H.; Zhang, J.X. A Review of Recurrent Neural Networks: LSTM Cells and Network Architectures. Neural Comput. 2019, 31, 1235–1270. [Google Scholar] [CrossRef]
- Shen, S.L.; Njock, P.G.A.; Zhou, A.N.; Lyu, H.M. Dynamic prediction of jet grouted column diameter in soft soil using Bi-LSTM deep learning. Acta Geotech. 2021, 16, 303–315. [Google Scholar] [CrossRef]
- Yuan, X.H.; Chen, C.; Jiang, M.; Yuan, Y.B. Prediction interval of wind power using parameter optimized Beta distribution based LSTM model. Appl. Soft Comput. 2019, 82, 105550. [Google Scholar] [CrossRef]
- Yang, Y.; Zeng, Q.L.; Yin, G.J.; Wan, L.R. Vibration Test of Single Coal Gangue Particle Directly Impacting the Metal Plate and the Study of Coal Gangue Recognition Based on Vibration Signal and Stacking Integration. Ieee Access 2019, 7, 106783–106804. [Google Scholar] [CrossRef]
- Luo, J.-S.; Lo, D.C.-T. Binary Malware Image Classification Using Machine Learning with Local Binary Pattern. In Proceedings of the 2017 IEEE International Conference on Big Data (Big Data), Boston, MA, USA, 11–14 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 4664–4667. [Google Scholar]
- Huang, Q.; Mao, J.; Liu, Y. An Improved Grid Search Algorithm of SVR Parameters Optimization. In Proceedings of the 2012 IEEE 14th International Conference on Communication Technology, Chengdu, China, 9–11 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1022–1026. [Google Scholar]
- Wong, T.-T.; Yeh, P.-Y. Reliable accuracy estimates from k-fold cross validation. IEEE Trans. Knowl. Data Eng. 2019, 32, 1586–1594. [Google Scholar] [CrossRef]
- Al-Badarneh, A.; Al-Shawakfa, E.; Bani-Ismail, B.; Al-Rababah, K.; Shatnawi, S. The impact of indexing approaches on Arabic text classification. J. Inf. Sci. 2017, 43, 159–173. [Google Scholar] [CrossRef]
- Li, L.; Wen, Z.; Wang, Z. Outlier detection and correction during the process of groundwater lever monitoring base on pauta criterion with self-learning and smooth processing. In Theory, Methodology, Tools and Applications for Modeling and Simulation of Complex Systems; Springer: Berlin/Heidelberg, Germany, 2016; pp. 497–503. [Google Scholar]
- Shen, C.; Bao, X.J.; Tan, J.B.; Liu, S.T.; Liu, Z.J. Two noise-robust axial scanning multi-image phase retrieval algorithms based on Pauta criterion and smoothness constraint. Opt. Express 2017, 25, 16235–16249. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Data #1 | Test Data #2 | Test Data #3 | Test Data #4 | |
|---|---|---|---|---|
| Recognition accuracy | 97.00% | 98.47% | 97.99% | 97.15% |
| Network Type | Test Data #1 | Test Data #2 | Test Data #3 | Test Data #4 |
|---|---|---|---|---|
| LSTM #1 | 93.72% | 92.72% | 95.61% | 97.72% |
| LSTM #2 | 95.15% | 96.17% | 97.37% | 96.96% |
| LSTM #3 | 93.44% | 92.15% | 94.49% | 96.20% |
| LSTM all | 96.72% | 93.10% | 98.25% | 96.96% |
| DNN | 96.86% | 98.47% | 98.62% | 97.15% |
| Data Sequence Number | Sensor #1 Amplitude | Sensor #2 Amplitude | Sensor #3 Amplitude | Drilling State Ground True | Drilling State Judged by the Network |
|---|---|---|---|---|---|
| ⋯ | ⋯ | ⋯ | ⋯ | ⋯ | ⋯ |
| 17 | 2.707553 | 2.619514 | 6.796628 | 1 | 1 |
| 18 | 1.930003 | 2.793286 | 5.172647 | 1 | 1 |
| 19 | 1.963386 | 2.451638 | 5.28292 | 1 | 1 |
| 20 | 0.502925 | 0.59154 | 1.494293 | 1 | 0 |
| 21 | 1.324366 | 2.157405 | 4.256246 | 1 | 1 |
| 22 | 3.292366 | 3.701357 | 7.12655 | 1 | 1 |
| 23 | 3.088607 | 3.210542 | 7.949529 | 1 | 1 |
| ⋯ | ⋯ | ⋯ | ⋯ | ⋯ | ⋯ |
| 94 | 0.391242 | 0.756341 | 0.875585 | 0 | 0 |
| 95 | 0.225544 | 0.427893 | 0.178449 | 0 | 0 |
| 96 | 0.334536 | 0.450832 | 0.215356 | 0 | 0 |
| 97 | 1.083765 | 1.435536 | 2.665392 | 0 | 1 |
| 98 | 0.483574 | 0.586286 | 0.426804 | 0 | 0 |
| 99 | 0.425458 | 0.389063 | 0.18947 | 0 | 0 |
| 100 | 0.204848 | 0.269115 | 0.353566 | 0 | 0 |
| ⋯ | ⋯ | ⋯ | ⋯ | ⋯ | ⋯ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Zhang, W.-L.; Li, C. Automatic Implementation Algorithm of Pressure Relief Drilling Depth Based on an Innovative Monitoring-While-Drilling Method. Sensors 2022, 22, 3234. https://doi.org/10.3390/s22093234
Wu Z, Zhang W-L, Li C. Automatic Implementation Algorithm of Pressure Relief Drilling Depth Based on an Innovative Monitoring-While-Drilling Method. Sensors. 2022; 22(9):3234. https://doi.org/10.3390/s22093234
Chicago/Turabian StyleWu, Zheng, Wen-Long Zhang, and Chen Li. 2022. "Automatic Implementation Algorithm of Pressure Relief Drilling Depth Based on an Innovative Monitoring-While-Drilling Method" Sensors 22, no. 9: 3234. https://doi.org/10.3390/s22093234
APA StyleWu, Z., Zhang, W. -L., & Li, C. (2022). Automatic Implementation Algorithm of Pressure Relief Drilling Depth Based on an Innovative Monitoring-While-Drilling Method. Sensors, 22(9), 3234. https://doi.org/10.3390/s22093234