
Research on Coverage Optimization in a WSN Based on an Improved COOT Bird Algorithm

 ,
,  ,
,
Abstract
:1. Introduction
1.1. Background of Problem
1.2. Related Works
1.3. Contributions
- A new and improved algorithm named COOTCLCO, based on the COOT bird algorithm, is proposed.
- Population diversity is improved by introducing the chaotic tent map to initialize populations. Expanding the search range of the populations by introducing the Lévy flight strategy, the capability of the algorithm to jump out of the local optimum is enhanced by introducing the Cauchy mutation and the opposition-based learning strategy.
- The optimization capability of the proposed algorithm is tested on unimodal, multimodal, and fixed-dimension multimodal benchmark test functions.
- The proposed algorithm is compared with seven metaheuristic algorithms in numerical analysis and convergence curves for the performance of finding the best optimal value.
- An integer linear programming model is used to describe the coverage optimization problem of wireless sensor networks, and the proposed algorithm is used to solve this optimization problem. The proposed algorithm is compared with six metaheuristic algorithms in the coverage optimization problem.
1.4. Notations
1.5. Organization
2. WSN Node Coverage Model
- (1)
- Each sensor node is a homogeneous sensor; that is, it has the same parameters, structure, and communication capabilities.
- (2)
- Each sensor node has sufficient energy, normal communication function, and timely access to data information.
- (3)
- Each sensor node can move freely, and can update the location information in time.
- (4)
- The sensing radius of each sensor node is and the communication radius is , both in units of meters, and .
3. COOT Optimization Algorithm
3.1. Random Movement
3.2. Chain Movement
3.3. Adjusting Position According to the Leader
3.4. Leader Movement
4. Improved COOT Optimization Algorithm
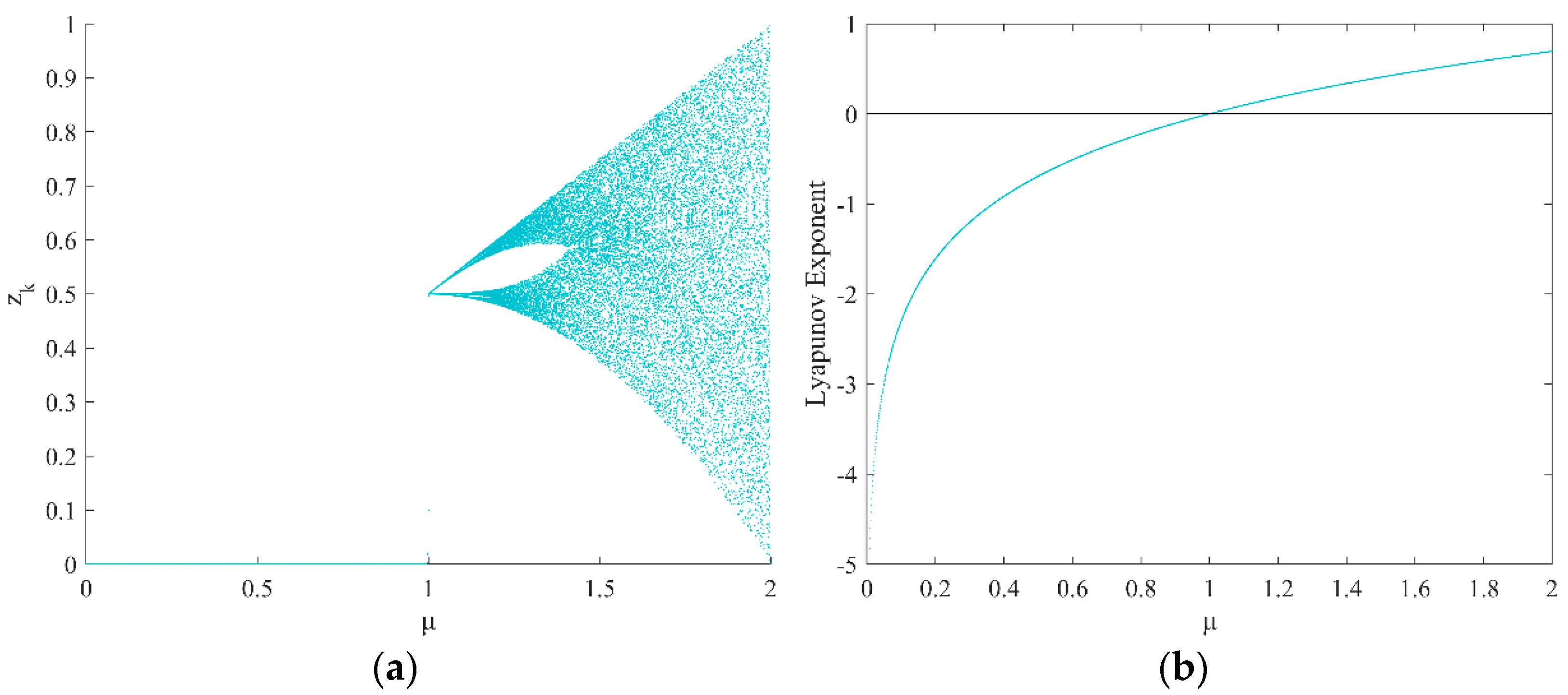
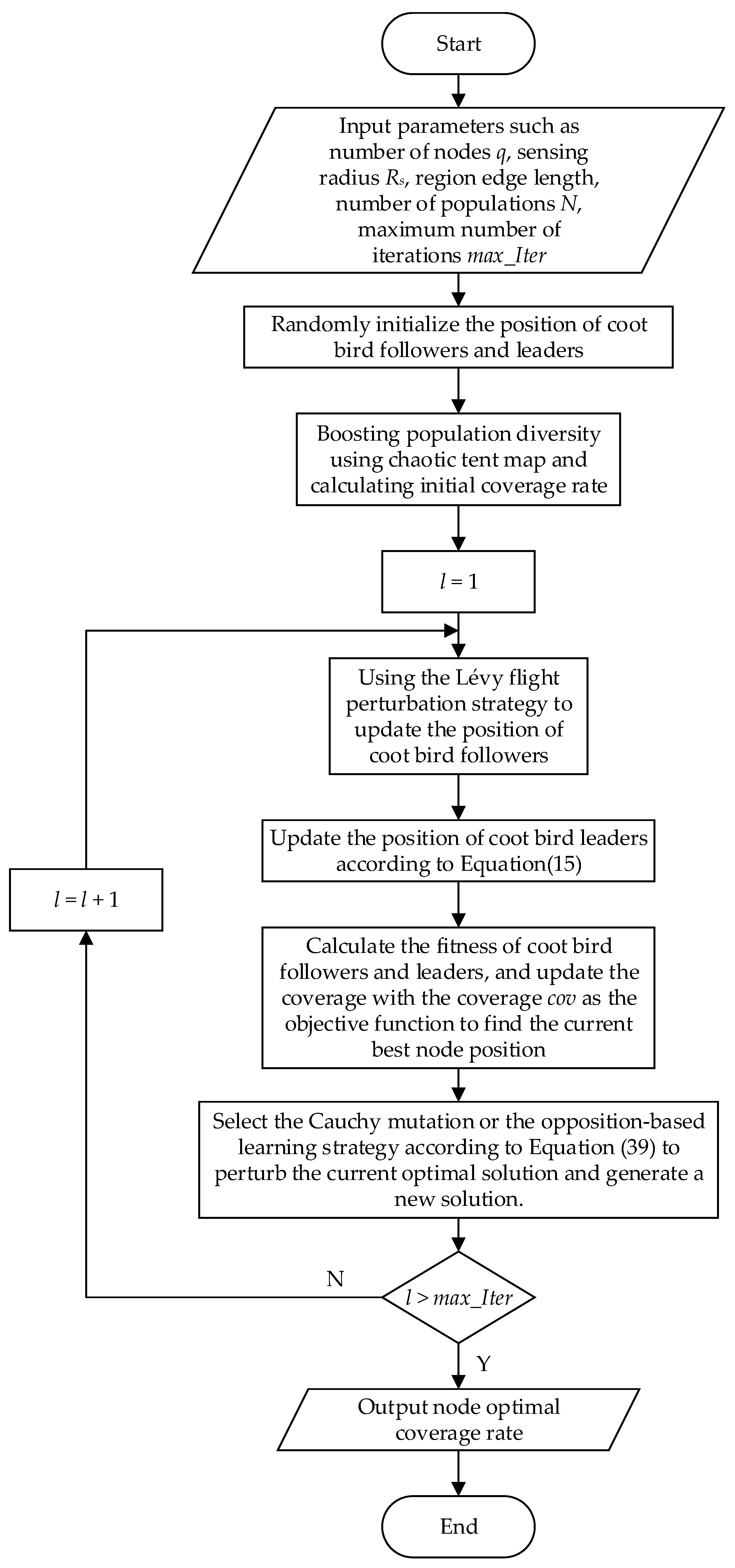
4.1. Chaotic Tent Map Initializes the Population
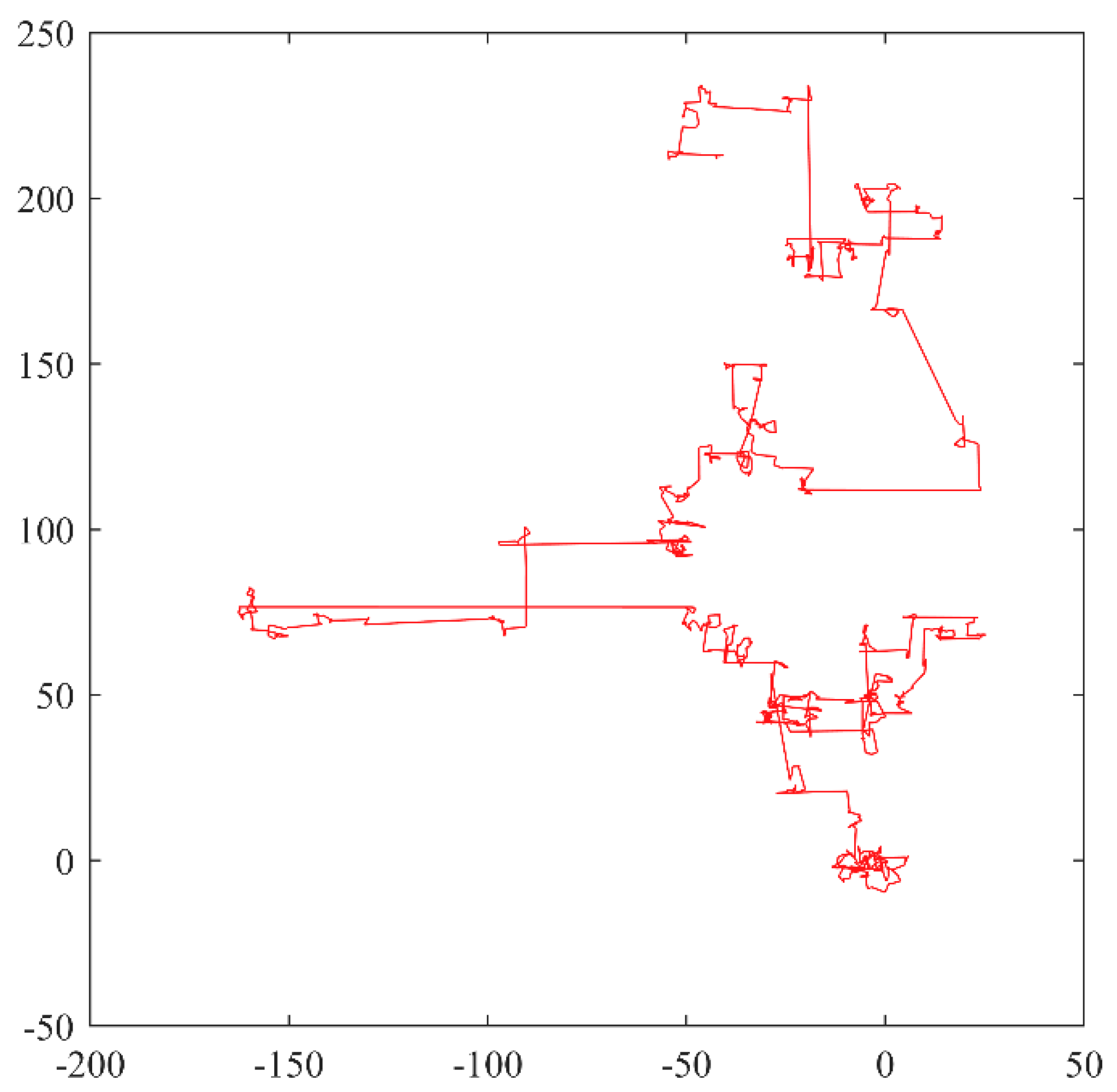
4.2. Lévy Flight Strategy
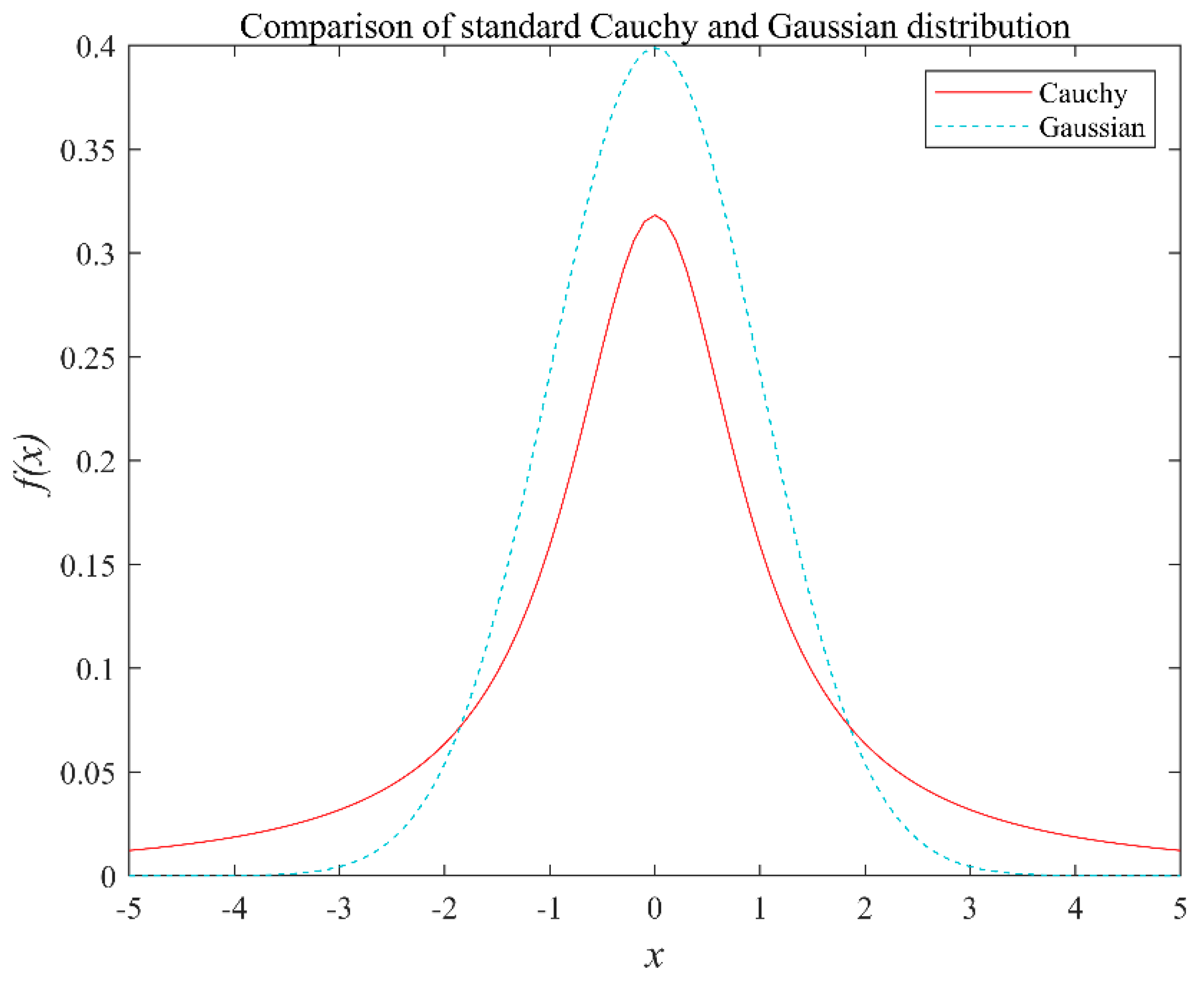
4.3. Fusing Cauchy Mutation and Opposition-Based Learning
4.4. Implementation Steps of COOTCLCO Algorithm
4.5. COOTCLCO Algorithm Time Complexity Analysis
- (1)
- The time complexity of initializing the population using the chaotic tent map is O(ND). Thus, the required time complexity is O(NDT) + O(ND) = O(NDT) in the case of introducing only the chaotic tent map.
- (2)
- The time complexity of perturbing the individual positions using the Lévy flight strategy is O(ND), and the time complexity of the algorithm is O(NDT) after T iterations. Thus, the required time complexity is O(NDT) + O(NDT) = O(NDT) when only the Lévy flight strategy is introduced.
- (3)
- The time complexity of the algorithm is O(NDT) + O(NDT) after T iterations by fusing the Cauchy mutation and the opposition-based learning strategy and perturbing the optimal solution’s position. Thus, the required time complexity is O(NDT) + O(NDT) + O(NDT) = O(NDT) with the introduction of only the fused Cauchy mutation and the opposition-based learning strategy.
5. Coverage Optimization Strategy
6. Simulation Experiments and Analysis
6.1. Experimental Design
6.2. Performance Comparison on Benchmark Functions
6.2.1. Analysis of Numerical Results
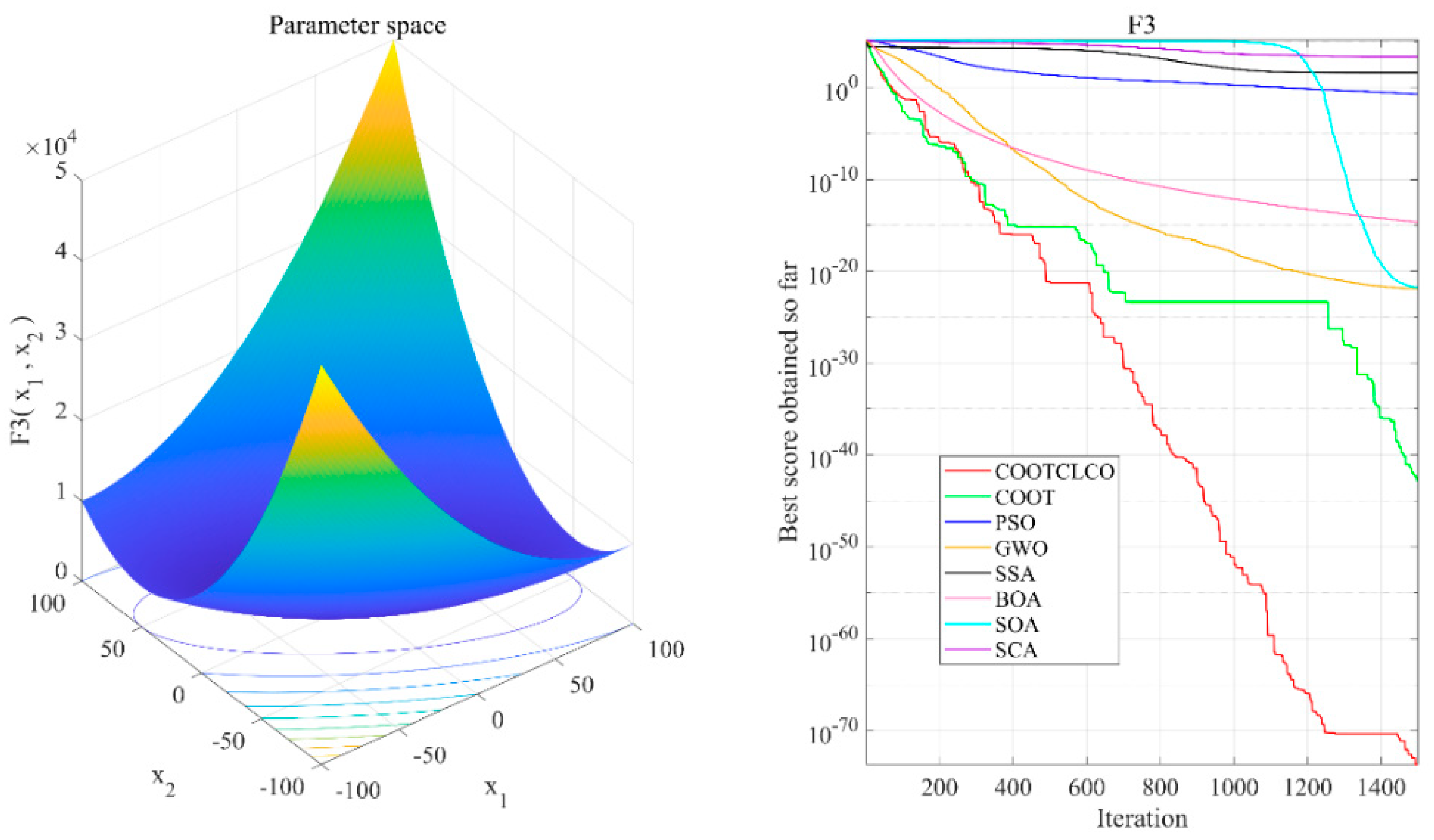
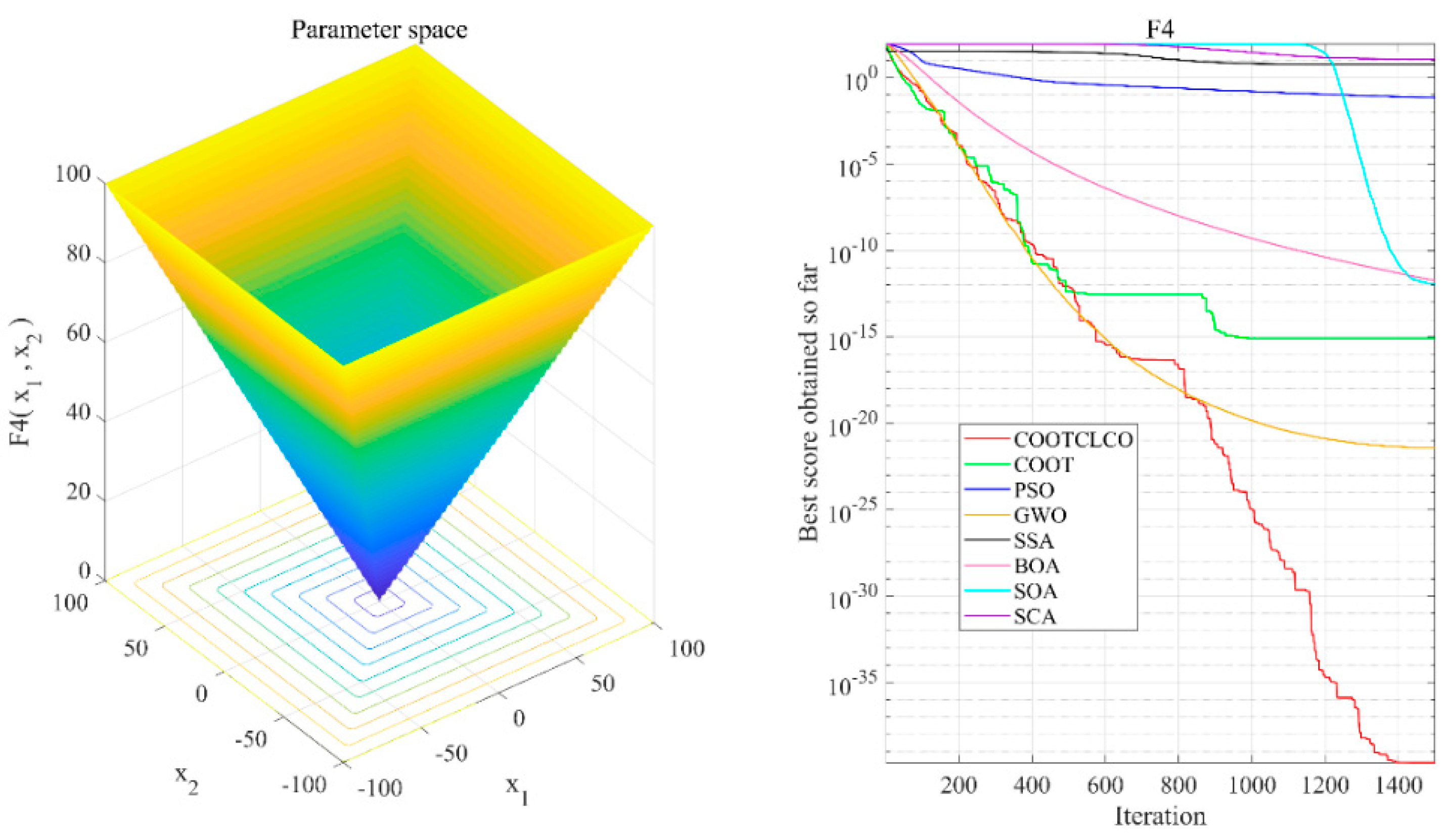
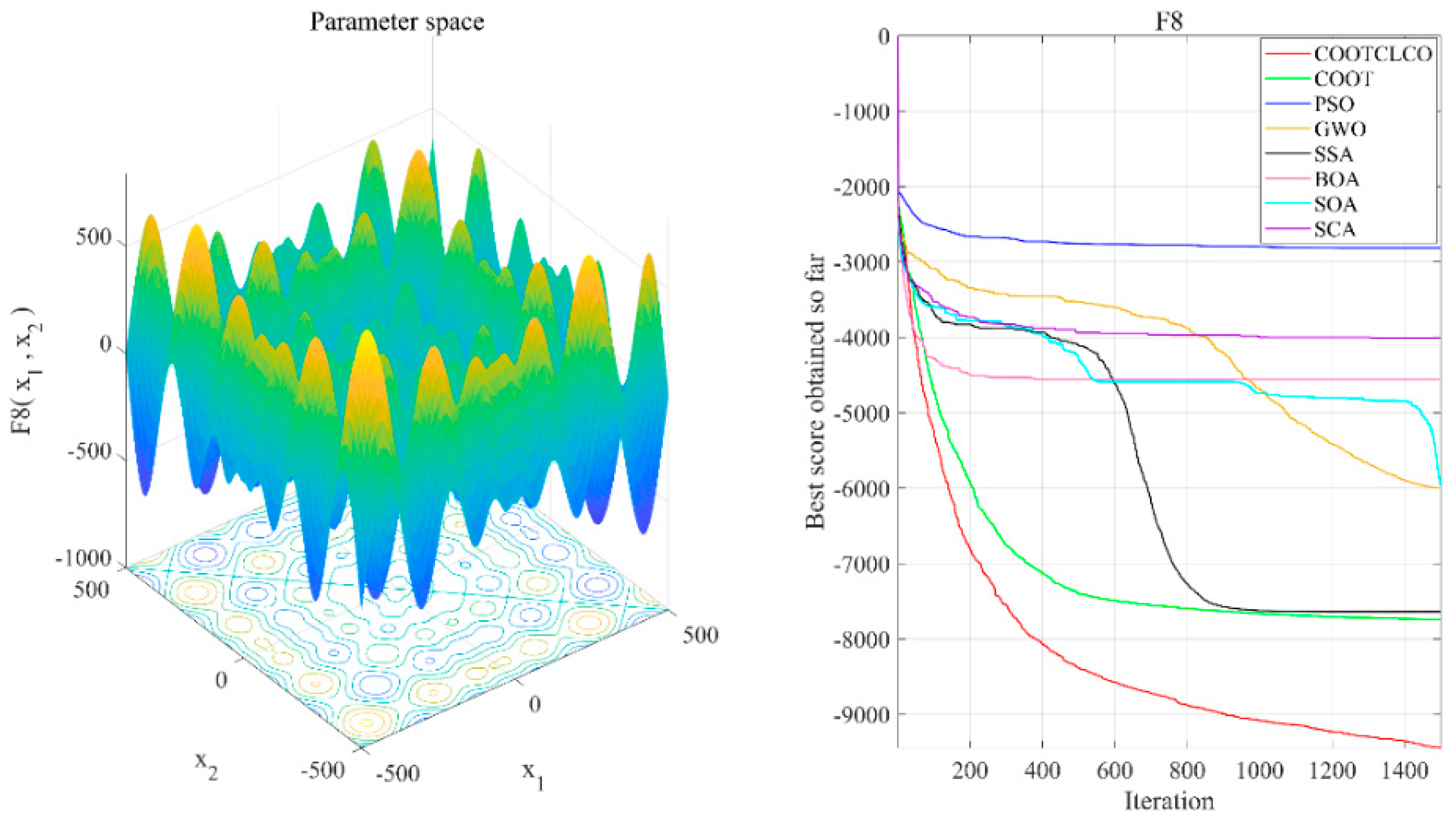
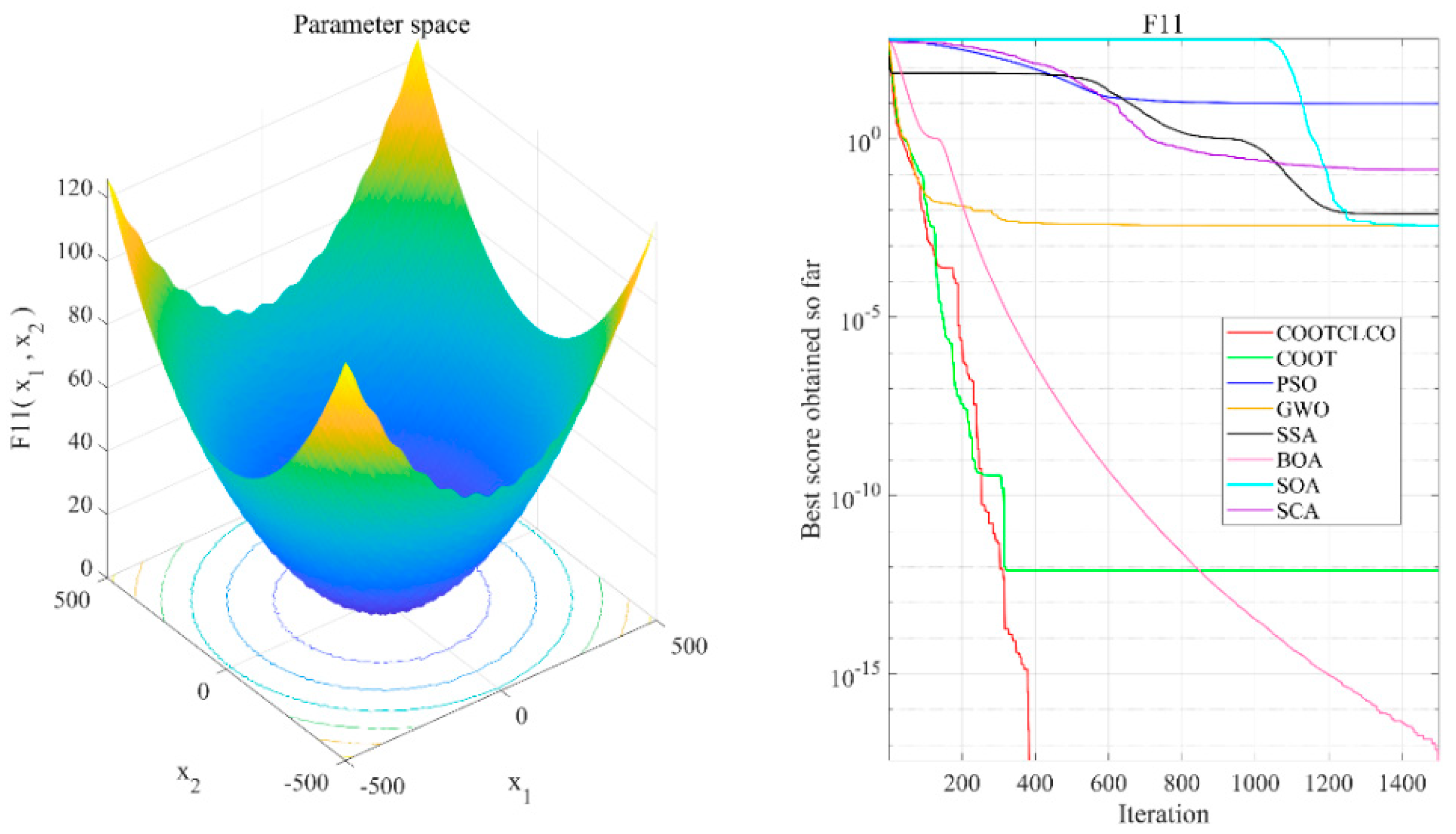
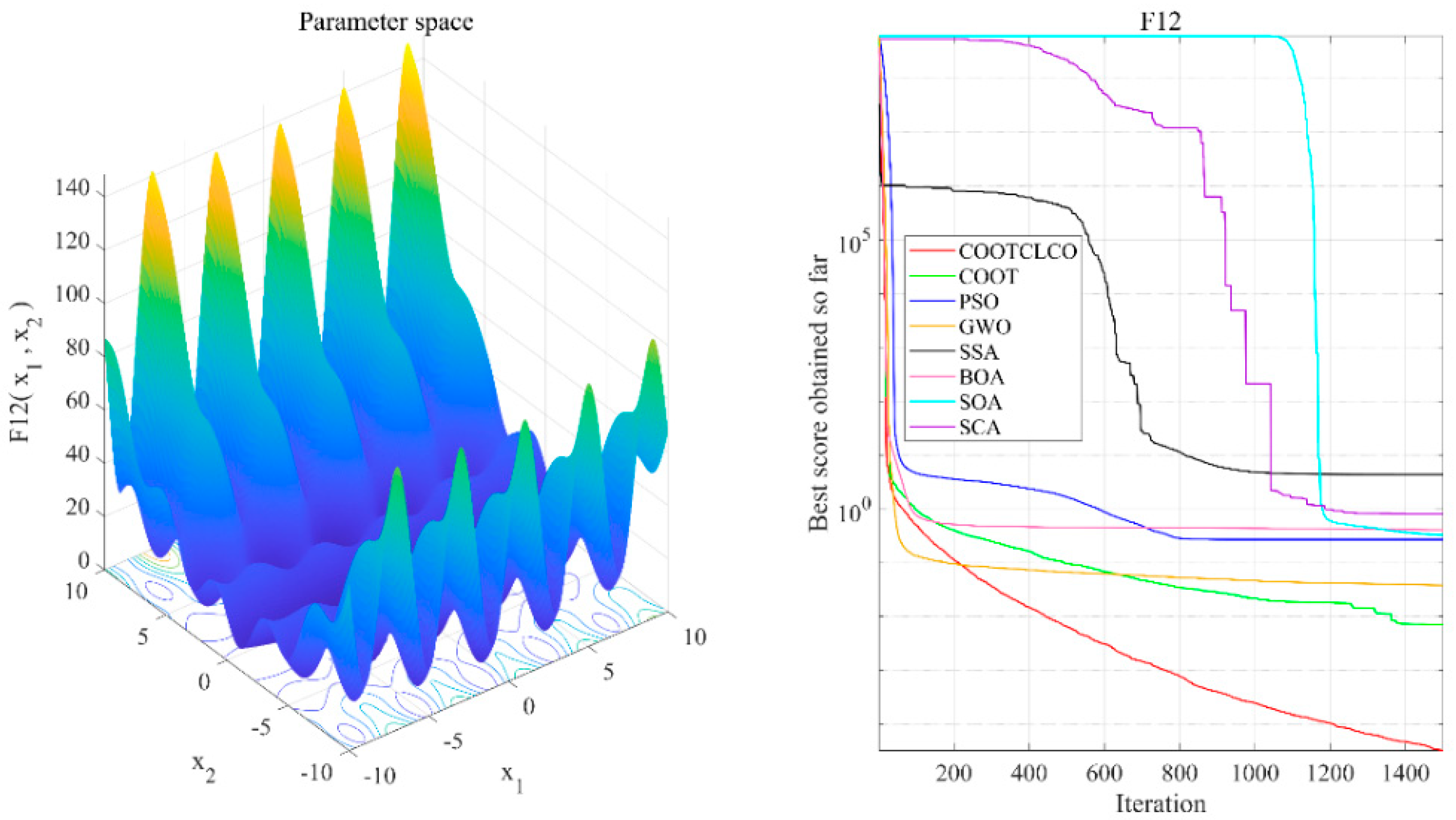
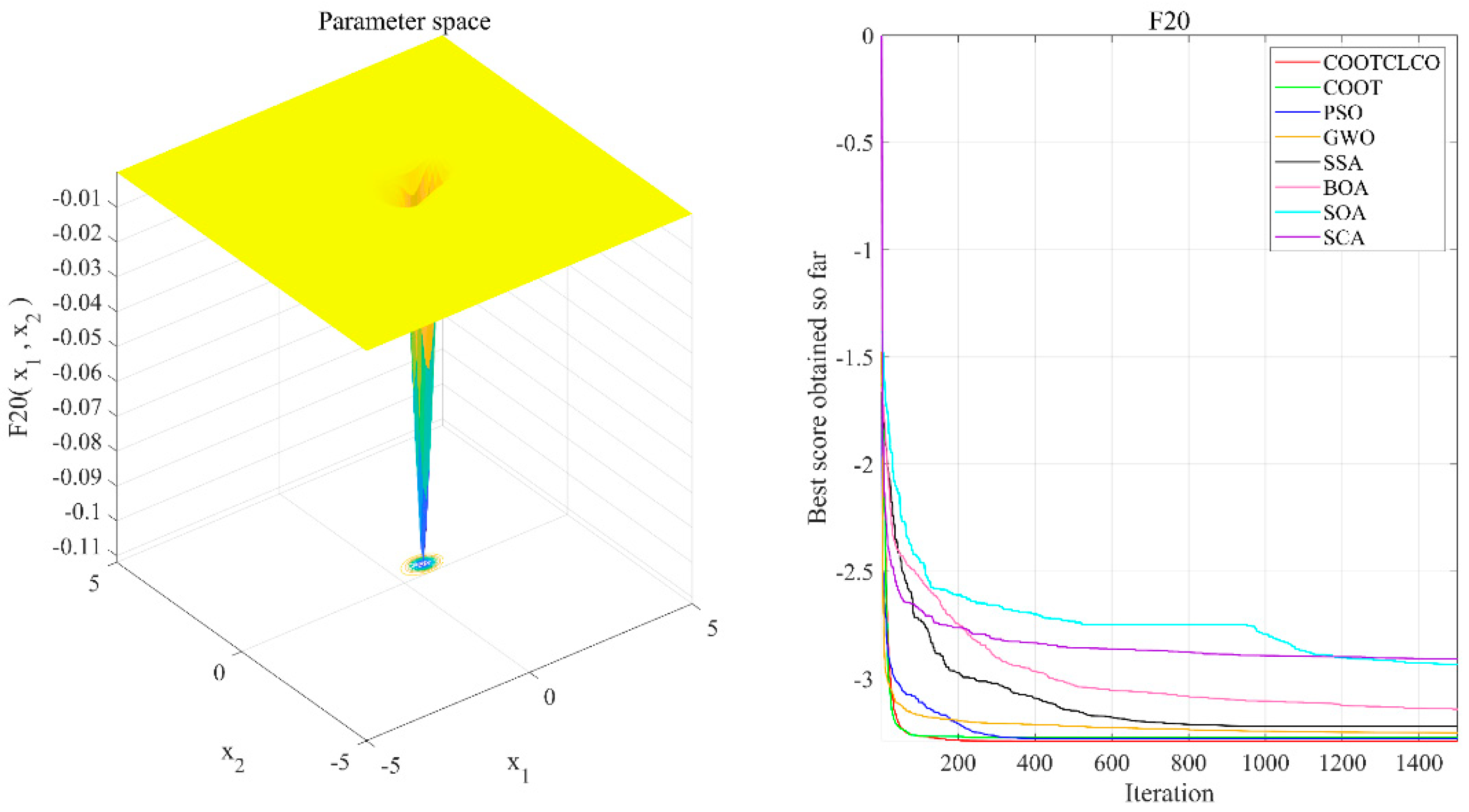
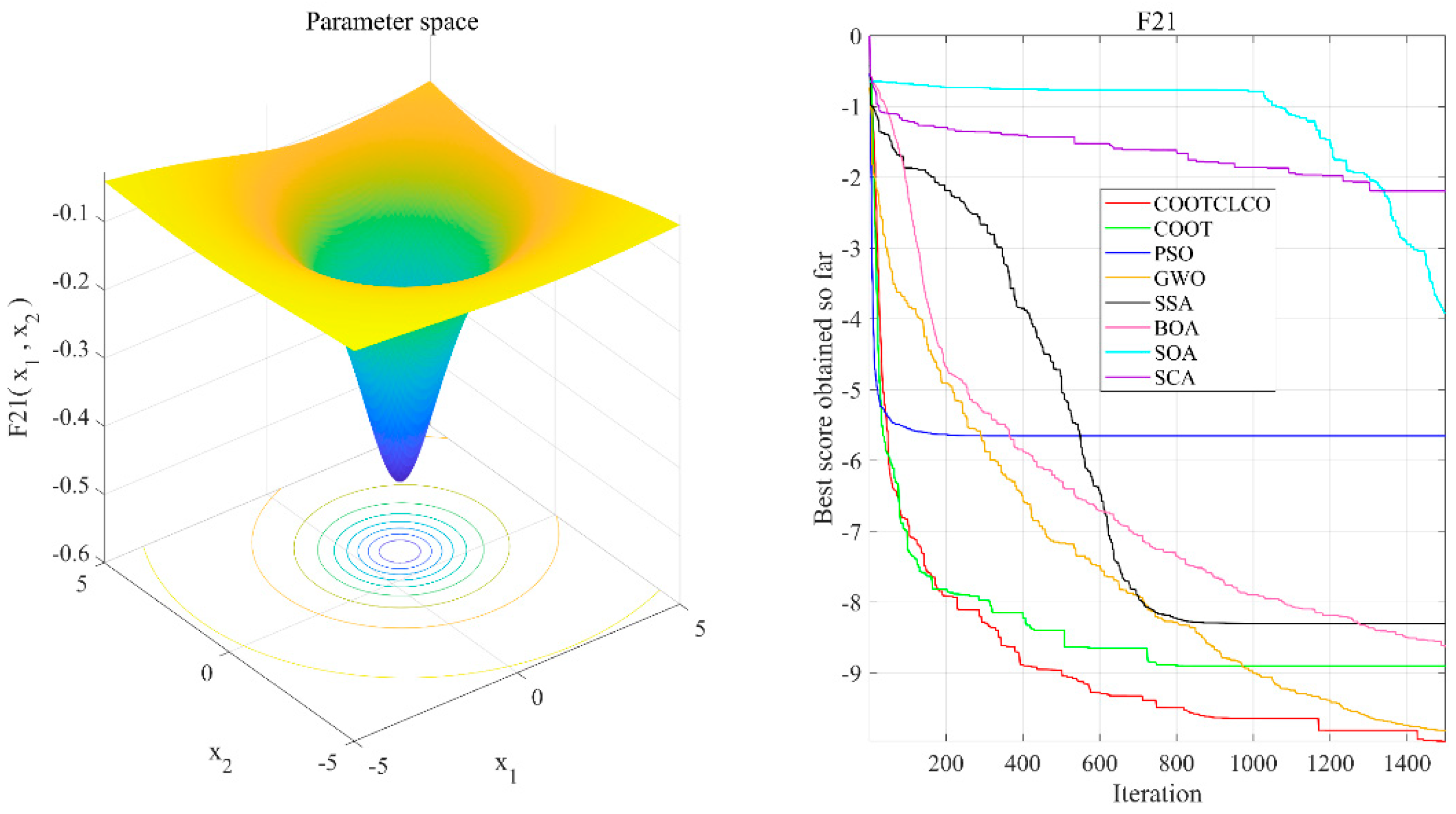
6.2.2. Analysis of Convergence Curves
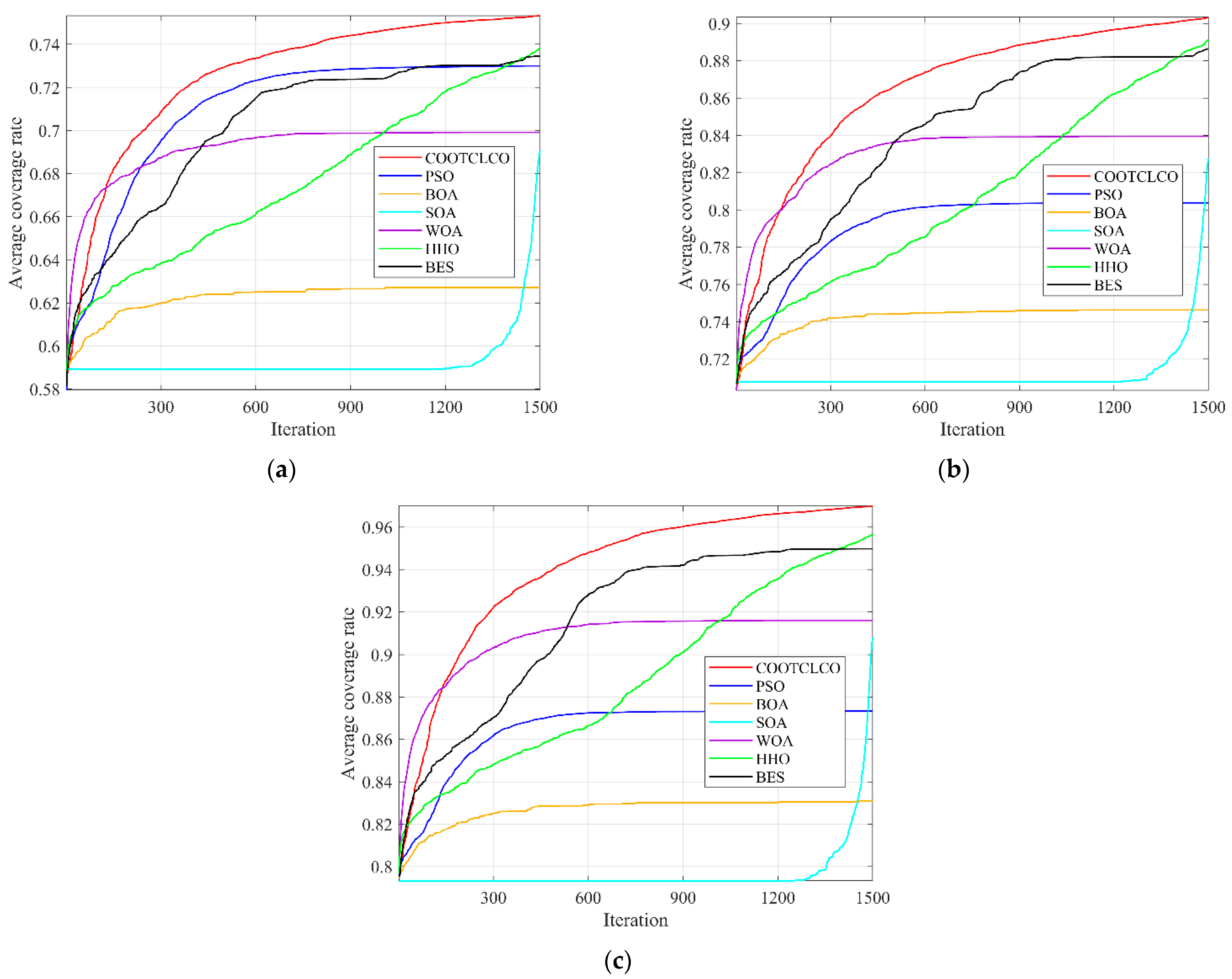
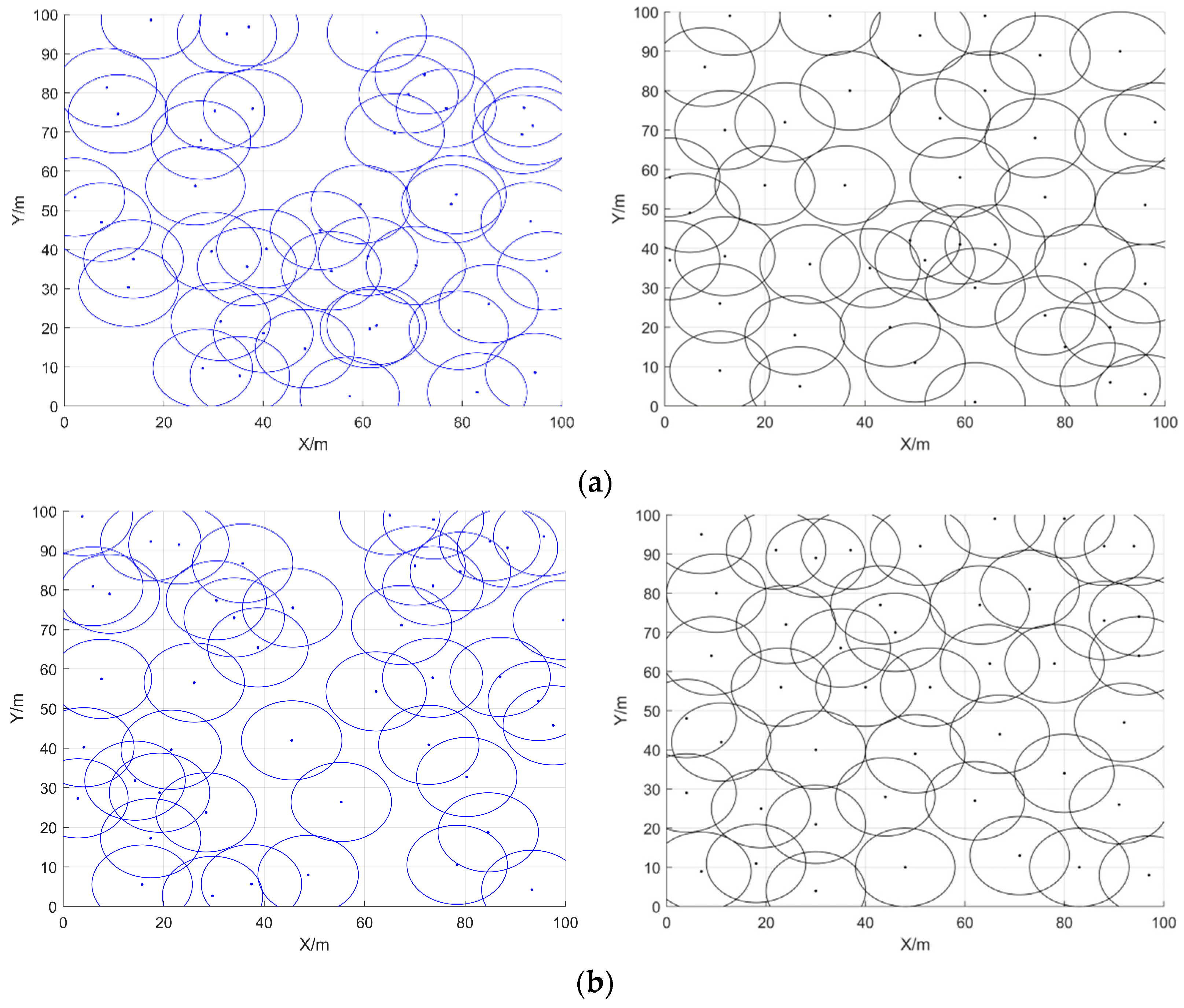
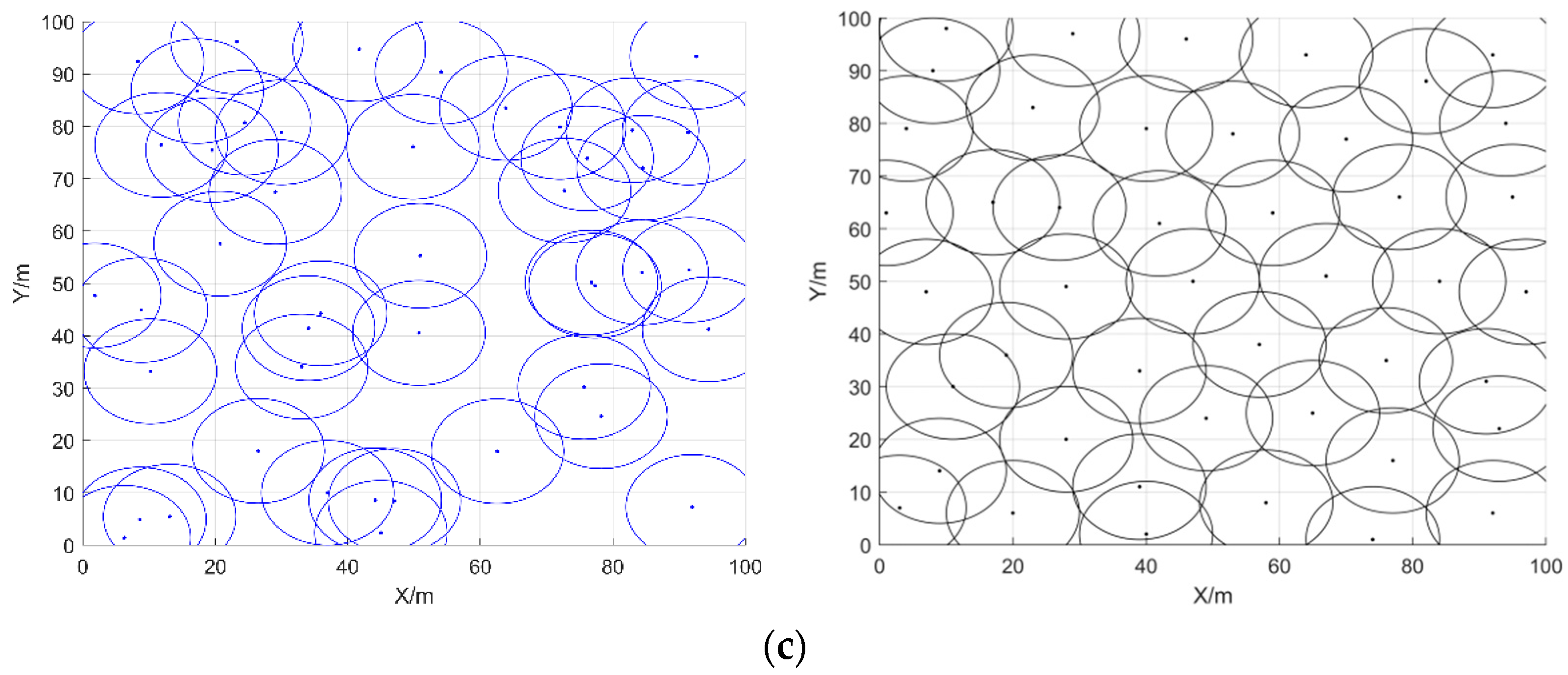
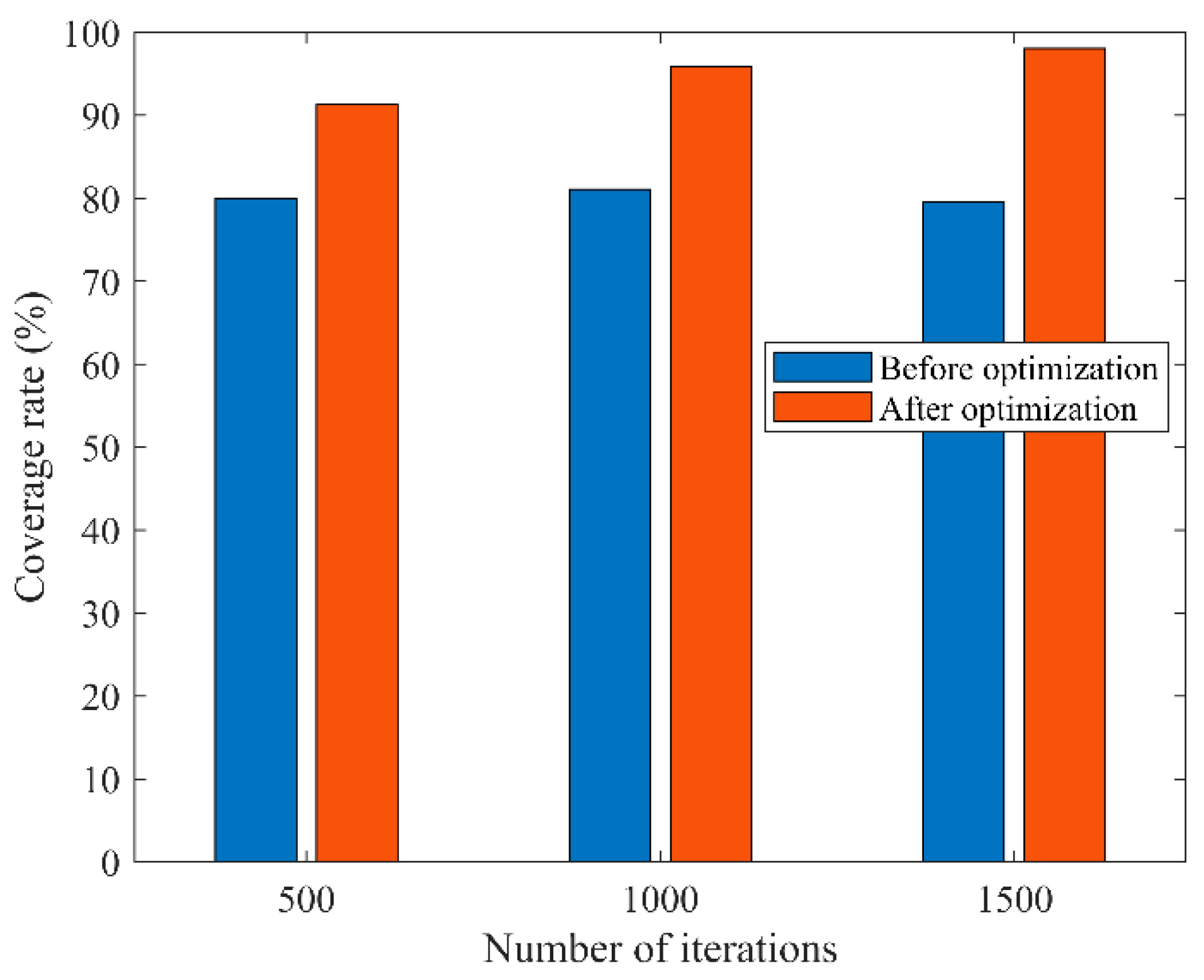
6.3. Coverage Performance Simulation Experiment and Analysis
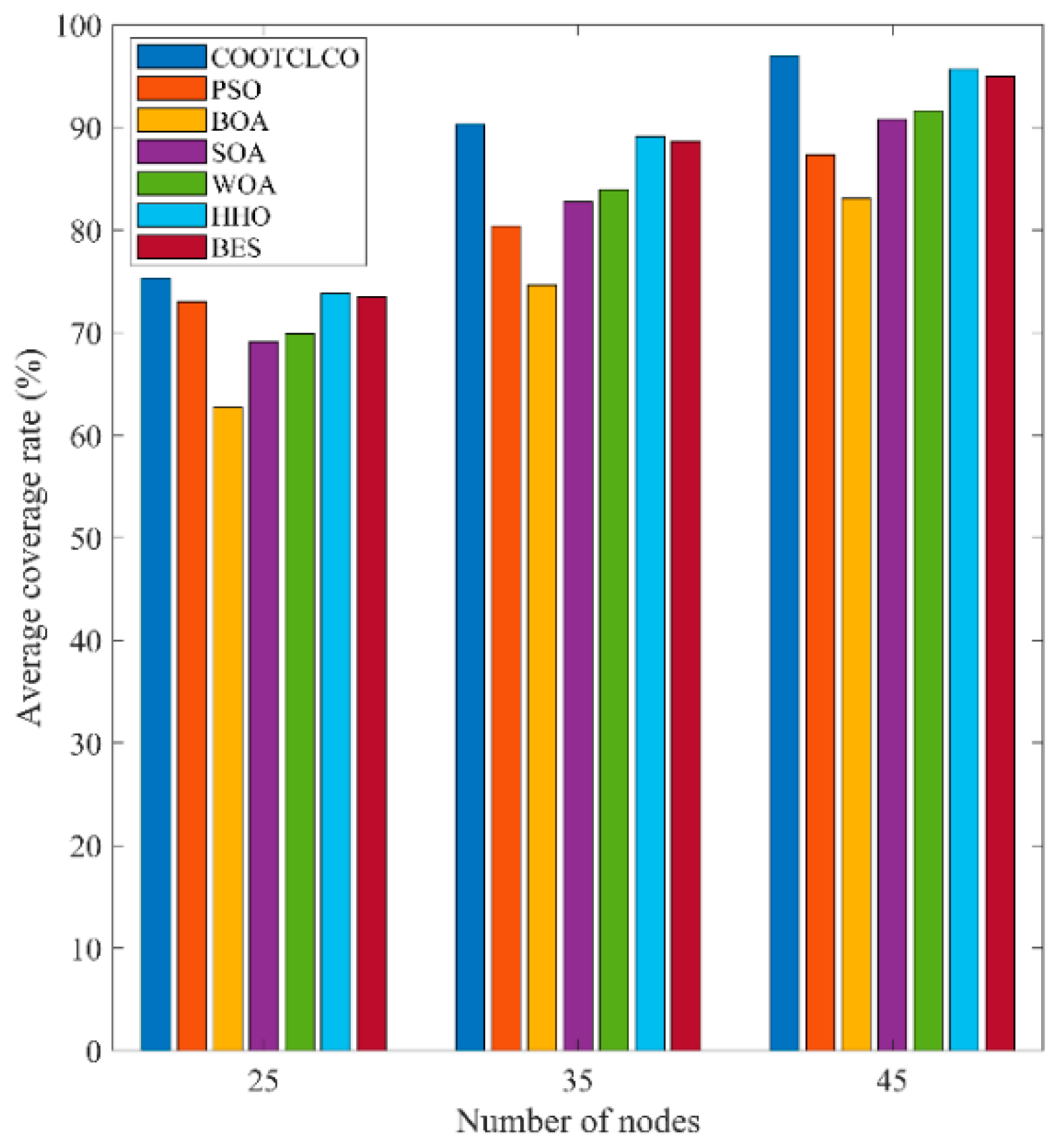
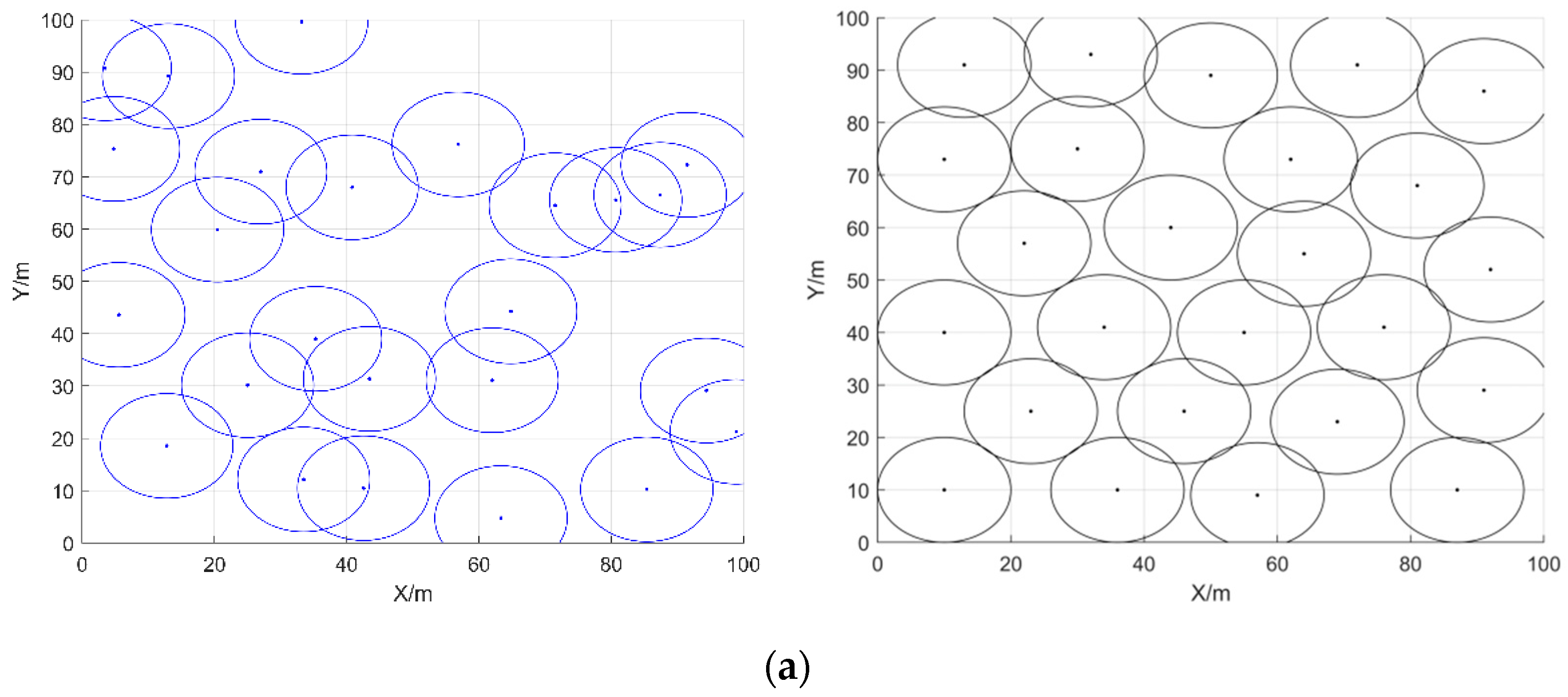
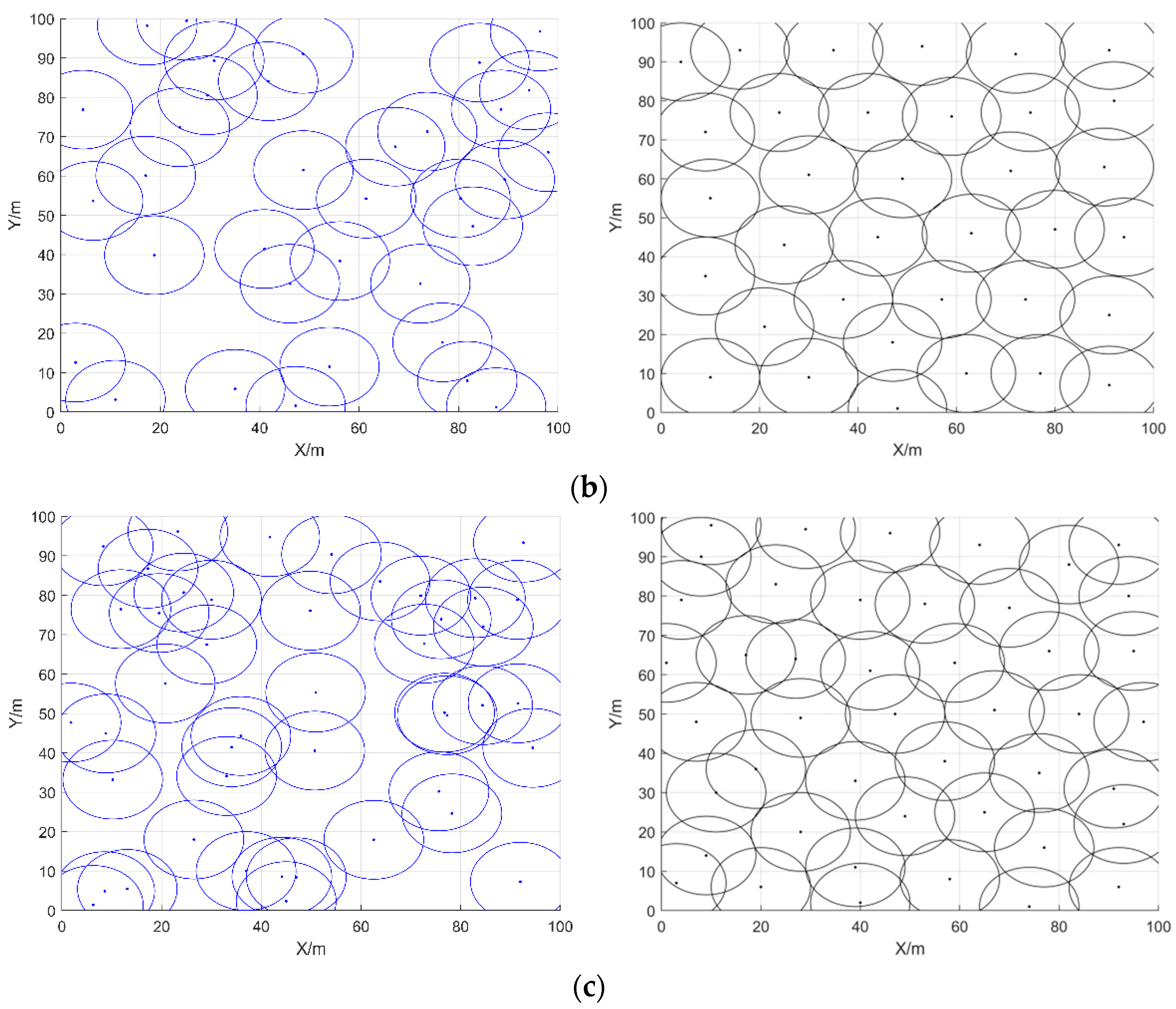
6.3.1. Comparative Experiment 1 and Result Analysis
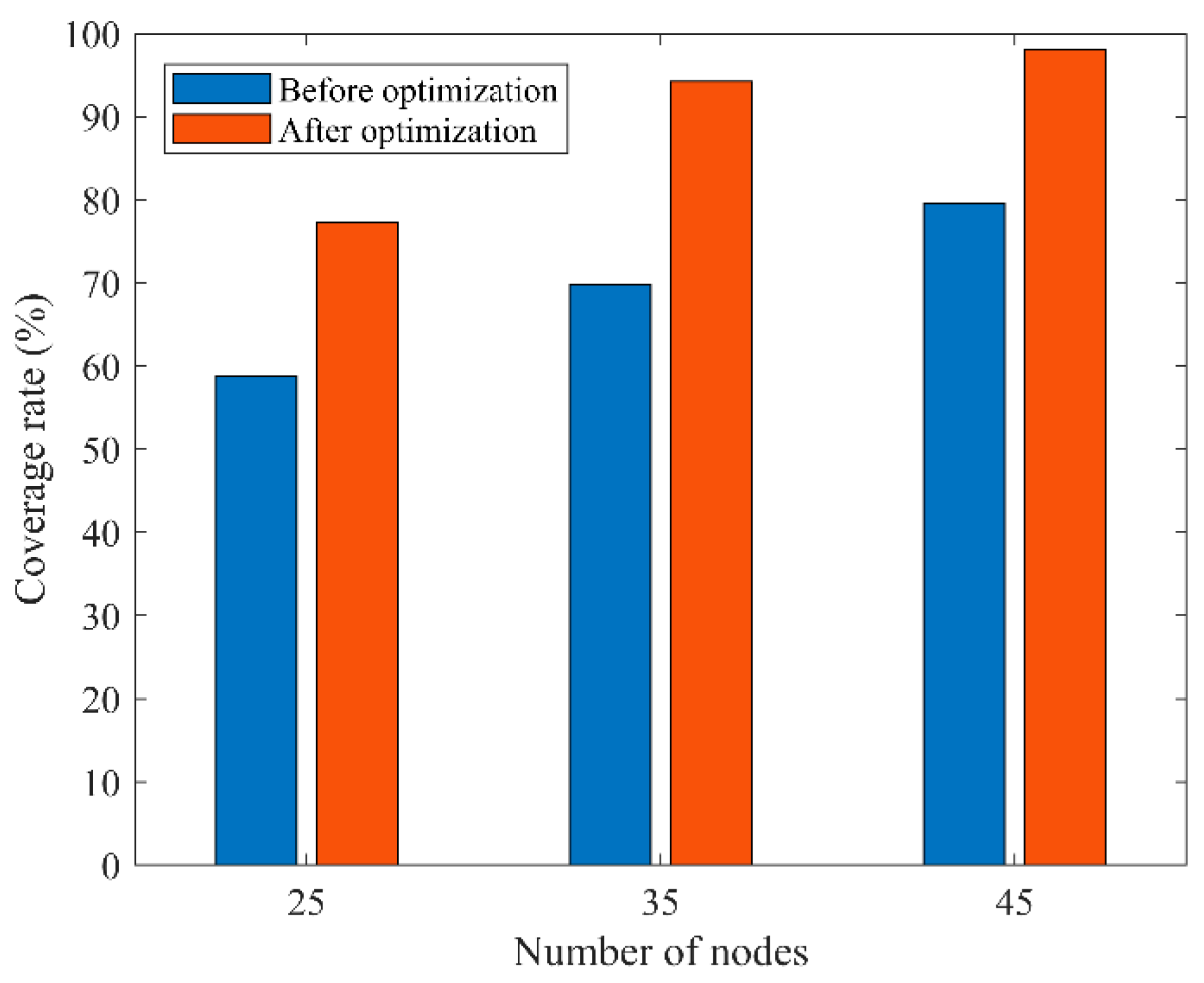
6.3.2. Comparative Experiment 2 and Result Analysis
6.3.3. Comparative Experiment 3 and Result Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless Sensor Networks: A Survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef] [Green Version]
- Zhu, C.; Zheng, C.; Shu, L.; Han, G. A Survey on Coverage and Connectivity Issues in Wireless Sensor Networks. J. Netw. Comput. Appl. 2012, 35, 619–632. [Google Scholar] [CrossRef]
- Miao, Z.; Yuan, X.; Zhou, F.; Qiu, X.; Song, Y.; Chen, K. Grey Wolf Optimizer with an Enhanced Hierarchy and Its Application to the Wireless Sensor Network Coverage Optimization Problem. Appl. Soft Comput. 2020, 96, 106602. [Google Scholar] [CrossRef]
- Rebai, M.; Le Berre, M.; Snoussi, H.; Hnaien, F.; Khoukhi, L. Sensor Deployment Optimization Methods to Achieve Both Coverage and Connectivity in Wireless Sensor Networks. Comput. Oper. Res. 2015, 59, 11–21. [Google Scholar] [CrossRef]
- Tariq, N.; Asim, M.; Maamar, Z.; Farooqi, M.Z.; Faci, N.; Baker, T. A Mobile Code-Driven Trust Mechanism for Detecting Internal Attacks in Sensor Node-Powered IoT. J. Parallel Distrib. Comput. 2019, 134, 198–206. [Google Scholar] [CrossRef]
- Tariq, N.; Asim, M.; Khan, F.A.; Baker, T.; Khalid, U.; Derhab, A. A Blockchain-Based Multi-Mobile Code-Driven Trust Mechanism for Detecting Internal Attacks in Internet of Things. Sensors 2021, 21, 23. [Google Scholar] [CrossRef]
- Deepa, R.; Venkataraman, R. Enhancing Whale Optimization Algorithm with Levy Flight for Coverage Optimization in Wireless Sensor Networks. Comput. Electr. Eng. 2021, 94, 107359. [Google Scholar] [CrossRef]
- Wang, S.; Yang, X.; Wang, X.; Qian, Z. A Virtual Force Algorithm-Lévy-Embedded Grey Wolf Optimization Algorithm for Wireless Sensor Network Coverage Optimization. Sensors 2019, 19, 2735. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Tao, X.; Cui, Q. Joint Multi-Cell Resource Allocation Using Pure Binary-Integer Programming for LTE Uplink. In Proceedings of the 2014 IEEE 79th Vehicular Technology Conference (VTC Spring), Seoul, Korea, 18–21 May 2014; pp. 1–5. [Google Scholar]
- Liang, D.; Shen, H.; Chen, L. Maximum Target Coverage Problem in Mobile Wireless Sensor Networks. Sensors 2020, 21, 184. [Google Scholar] [CrossRef]
- Zou, Y.; Chakrabarty, K. A Distributed Coverage- and Connectivity-Centric Technique for Selecting Active Nodes in Wireless Sensor Networks. IEEE Trans. Comput. 2005, 54, 978–991. [Google Scholar] [CrossRef]
- Tsai, C.-W.; Tsai, P.-W.; Pan, J.-S.; Chao, H.-C. Metaheuristics for the Deployment Problem of WSN: A Review. Microprocess. Microsyst. 2015, 39, 1305–1317. [Google Scholar] [CrossRef]
- Alia, O.M.; Al-Ajouri, A. Maximizing Wireless Sensor Network Coverage With Minimum Cost Using Harmony Search Algorithm. IEEE Sens. J. 2017, 17, 882–896. [Google Scholar] [CrossRef]
- Senouci, M.R.; Abdellaoui, A. Efficient Sensor Placement Heuristics. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Mahdavi, S.; Shiri, M.E.; Rahnamayan, S. Metaheuristics in Large-Scale Global Continues Optimization: A Survey. Inf. Sci. 2015, 295, 407–428. [Google Scholar] [CrossRef]
- Dragoi, E.N.; Dafinescu, V. Review of Metaheuristics Inspired from the Animal Kingdom. Mathematics 2021, 9, 2335. [Google Scholar] [CrossRef]
- Naruei, I.; Keynia, F. A New Optimization Method Based on COOT Bird Natural Life Model. Expert Syst. Appl. 2021, 183, 115352. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic Algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- Koza, J.R. Genetic Programming as a Means for Programming Computers by Natural Selection. Stat. Comput. 1994, 4, 87–112. [Google Scholar] [CrossRef]
- Yao, X.; Liu, Y.; Lin, G. Evolutionary Programming Made Faster. IEEE Trans. Evol. Comput. 1999, 3, 82–102. [Google Scholar]
- Storn, R. On the Usage of Differential Evolution for Function Optimization. In Proceedings of the North American Fuzzy Information Processing, Berkeley, CA, USA, 19–22 June 1996; pp. 519–523. [Google Scholar]
- Simon, D. Biogeography-Based Optimization. IEEE Trans. Evol. Comput. 2008, 12, 702–713. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A Bio-Inspired Optimizer for Engineering Design Problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Arora, S.; Singh, S. Butterfly Optimization Algorithm: A Novel Approach for Global Optimization. Soft Comput. 2019, 23, 715–734. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Seagull Optimization Algorithm: Theory and Its Applications for Large-Scale Industrial Engineering Problems. Knowl.-Based Syst. 2019, 165, 169–196. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris Hawks Optimization: Algorithm and Applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Alsattar, H.A.; Zaidan, A.A.; Zaidan, B.B. Novel Meta-Heuristic Bald Eagle Search Optimisation Algorithm. Artif. Intell. Rev. 2020, 53, 2237–2264. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Hatamlou, A. Black Hole: A New Heuristic Optimization Approach for Data Clustering. Inf. Sci. 2013, 222, 175–184. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for Solving Optimization Problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Kaveh, A.; Khayatazad, M. A New Meta-Heuristic Method: Ray Optimization. Comput. Struct. 2012, 112–113, 283–294. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching-Learning-Based Optimization: A Novel Method for Constrained Mechanical Design Optimization Problems. Comput.-Aided Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A New Heuristic Optimization Algorithm: Harmony Search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Ghorbani, N.; Babaei, E. Exchange Market Algorithm. Appl. Soft Comput. 2014, 19, 177–187. [Google Scholar] [CrossRef]
- Atashpaz-Gargari, E.; Lucas, C. Imperialist Competitive Algorithm: An Algorithm for Optimization Inspired by Imperialistic Competition. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, Singapore, 25–28 September 2007; pp. 4661–4667. [Google Scholar]
- Askari, Q.; Younas, I.; Saeed, M. Political Optimizer: A Novel Socio-Inspired Meta-Heuristic for Global Optimization. Knowl.-Based Syst. 2020, 195, 105709. [Google Scholar] [CrossRef]
- ZainEldin, H.; Badawy, M.; Elhosseini, M.; Arafat, H.; Abraham, A. An Improved Dynamic Deployment Technique Based-on Genetic Algorithm (IDDT-GA) for Maximizing Coverage in Wireless Sensor Networks. J. Ambient Intell. Humaniz. Comput. 2020, 11, 4177–4194. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, L.; Yue, Y.; Cai, Y.; Hang, B. A Novel Coverage Optimization Strategy Based on Grey Wolf Algorithm Optimized by Simulated Annealing for Wireless Sensor Networks. Comput. Intell. Neurosci. 2021, 2021, 1–14. [Google Scholar] [CrossRef]
- Liu, W.; Yang, S.; Sun, S.; Wei, S. A Node Deployment Optimization Method of WSN Based on Ant-Lion Optimization Algorithm. In Proceedings of the 2018 IEEE 4th International Symposium on Wireless Systems within the International Conferences on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS-SWS), Lviv, Ukraine, 20–21 September 2018; pp. 88–92. [Google Scholar]
- Liu, X.; Zhang, X.; Zhu, Q. Enhanced Fireworks Algorithm for Dynamic Deployment of Wireless Sensor Networks. In Proceedings of the 2017 2nd International Conference on Frontiers of Sensors Technologies (ICFST), Shenzhen, China, 14–16 April 2017; pp. 161–165. [Google Scholar]
- Liao, W.-H.; Kao, Y.; Li, Y.-S. A Sensor Deployment Approach Using Glowworm Swarm Optimization Algorithm in Wireless Sensor Networks. Expert Syst. Appl. 2011, 38, 12180–12188. [Google Scholar] [CrossRef]
- Ozturk, C.; Karaboga, D.; Gorkemli, B. Probabilistic Dynamic Deployment of Wireless Sensor Networks by Artificial Bee Colony Algorithm. Sensors 2011, 11, 6056–6065. [Google Scholar] [CrossRef] [Green Version]
- Zhu, F.; Wang, W. A Coverage Optimization Method for WSNs Based on the Improved Weed Algorithm. Sensors 2021, 21, 5869. [Google Scholar] [CrossRef]
- Memarzadeh, G.; Keynia, F. A New Optimal Energy Storage System Model for Wind Power Producers Based on Long Short Term Memory and Coot Bird Search Algorithm. J. Energy Storage 2021, 44, 103401. [Google Scholar] [CrossRef]
- Gouda, E.A.; Kotb, M.F.; Ghoneim, S.S.M.; Al-Harthi, M.M.; El-Fergany, A.A. Performance Assessment of Solar Generating Units Based on Coot Bird Metaheuristic Optimizer. IEEE Access 2021, 9, 111616–111632. [Google Scholar] [CrossRef]
- Mahdy, A.; Hasanien, H.-M.; Helmy, W.; Turky, R.-A.; Aleem, S.-H.-A. Transient Stability Improvement of Wave Energy Conversion Systems Connected to Power Grid Using Anti-Windup-Coot Optimization Strategy. Energy 2022, 245, 123321. [Google Scholar] [CrossRef]
- Houssein, E.-H.; Hashim, F.-A.; Ferahtia, S.; Rezk, H. Battery Parameter Identification Strategy Based on Modified Coot Optimization Algorithm. J. Energy Storage 2022, 46, 103848. [Google Scholar] [CrossRef]
- Alqahtani, A.-S.; Saravanan, P.; Maheswari, M.; Alshmrany, S. An Automatic Query Expansion Based on Hybrid CMO-COOT Algorithm for Optimized Information Retrieval. J. Supercomput. 2022, 78, 8625–8643. [Google Scholar] [CrossRef]
- Shan, L.; Qiang, H.; Li, J.; Wang, Z.-Q. Chaotic Optimization Algorithm Based on Tent Map. Control Decis. 2005, 20, 179–182. [Google Scholar]
- Li, Y.; Han, M.; Guo, Q. Modified Whale Optimization Algorithm Based on Tent Chaotic Mapping and Its Application in Structural Optimization. KSCE J. Civ. Eng. 2020, 24, 3703–3713. [Google Scholar] [CrossRef]
- Zhu, H.; Pu, B.; Zhu, Z.; Zhao, Y.; Song, Y. Two-dimensional Sine-tent-based Hyper Chaotic Map and Its Application in Image Encryption. J. Chin. Comput. Syst. 2019, 40, 1510–1518. [Google Scholar]
- Chechkin, A.V.; Metzler, R.; Klafter, J.; Gonchar, V.Y. Introduction to the Theory of Lévy Flights. In Anomalous Transport; Klages, R., Radons, G., Sokolov, I.M., Eds.; Wiley-VCH: Weinheim, Germany, 2008; pp. 129–162. [Google Scholar]
- Wang, X.-W.; Yan, Y.-X.; Gu, X.-S. Welding Robot Path Planning Based on Levy-PSO. Control Decis. 2017, 32, 373–377. [Google Scholar]
- Yang, X.-S.; Deb, S. Cuckoo Search via Lévy Flights. In Proceedings of the 2009 World Congress on Nature Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Mantegna, R.N. Fast, Accurate Algorithm for Numerical Simulation of Lévy Stable Stochastic Processes. Phys. Rev. E 1994, 49, 4677–4683. [Google Scholar] [CrossRef]
- Haklı, H.; Uğuz, H. A Novel Particle Swarm Optimization Algorithm with Levy Flight. Appl. Soft Comput. 2014, 23, 333–345. [Google Scholar] [CrossRef]
- Tizhoosh, H.R. Opposition-Based Learning: A New Scheme for Machine Intelligence. In Proceedings of the International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce (CIMCA-IAWTIC’06), Vienna, Austria, 28–30 November 2005; Volume 1, pp. 695–701. [Google Scholar]
- He, Q.; Lin, J.; Xu, H. Hybrid Cauchy Mutation and Uniform Distribution of Grasshopper Optimization Algorithm. Control Decis. 2021, 36, 1558–1568. [Google Scholar]
- Wang, H.; Li, H.; Liu, Y.; Li, C.; Zeng, S. Opposition-Based Particle Swarm Algorithm with Cauchy Mutation. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, Singapore, 25–28 September 2007; pp. 4750–4756. [Google Scholar]
- Higashi, N.; Iba, H. Particle Swarm Optimization with Gaussian Mutation. In Proceedings of the 2003 IEEE Swarm Intelligence Symposium, Indianapolis, IN, USA, 26 April 2003; pp. 72–79. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Descriptions |
|---|---|
| q | Number of sensor nodes |
| n | Number of target monitoring points |
| M × N | Size of the monitoring area |
| Si | The i-th sensor node |
| xi, yi | The location coordinates of each sensor node |
| Tj | The j-th target monitoring point |
| xj, yj | The location coordinates of each target point |
| Rs | Sensing radius |
| Rc | Communication radius |
| d(Si, Tj) | The Euclidean distance between Si and Tj |
| p | Probability of monitoring points being covered by nodes |
| P | Probability of monitoring points being jointly sensed |
| Cov | Coverage rate |
| CootPos(i) | The position of the i-th COOT |
| LeaderPos(k) | The position of the selected leader |
| d | The number of variables or problem dimensions |
| ub | The upper bound of the search space |
| lb | The lower bound of the search space |
| Q | Random initialization of the location |
| A, B | Control parameters |
| NL | The number of leaders |
| R1, R2, R3, R4 | The random numbers between the interval [0, 1] |
| R | The random number between the interval [−1, 1] |
| α, µ, γ, λ, v | Control parameters |
| s | Search path of the Lévy flight |
| X’LeaderPos(i) | The inverse solution of the current leader position |
| max_Iter | Maximum number of iterations |
| XGbestNew | The latest position after perturbed by Cauchy mutation |
| Ps | The selection probability |
| F | Function | Dim | Range | fmin |
|---|---|---|---|---|
| F1 | 30 | [−100, 100] | 0 | |
| F2 | 30 | [−10, 10] | 0 | |
| F3 | 30 | [−100, 100] | 0 | |
| F4 | 30 | [−100, 100] | 0 | |
| F5 | 30 | [−30, 30] | 0 | |
| F6 | 30 | [−100, 100] | 0 | |
| F7 | 30 | [−1.28, 1.28] | 0 |
| F | Function | Dim | Range | fmin |
|---|---|---|---|---|
| F8 | 30 | [−500, 500] | −418.9829×n | |
| F9 | 30 | [−5.12, 5.12] | 0 | |
| F10 | 30 | [−32, 32] | 0 | |
| F11 | 30 | [−600, 600] | 0 | |
| F12 | 30 | [−50, 50] | 0 | |
| F13 | 30 | [−50, 50] | 0 |
| F | Function | Dim | Range | fmin |
|---|---|---|---|---|
| F14 | 2 | [−65, 65] | 1 | |
| F15 | 4 | [−5, 5] | 0.0003 | |
| F16 | 2 | [−5, 5] | −1.0316 | |
| F17 | 2 | [−5, 5] | 0.398 | |
| F18 | 2 | [−2, 2] | 3 | |
| F19 | 3 | [1, 3] | −3.86 | |
| F20 | 6 | [0, 1] | −3.32 | |
| F21 | 4 | [0, 10] | −10.1532 | |
| F22 | 4 | [0, 10] | −10.4028 | |
| F23 | 4 | [0, 10] | −10.5363 |
| Algorithms | Parameters | Values |
|---|---|---|
| COOTCLCO | Population | 30 |
| Iteration | 1500 | |
| R | [−1, 1] | |
| R1 | [0, 1] | |
| R2 | [0, 1] | |
| µ | 2 | |
| r | tan((rand( )−0.5) × 0.5) | |
| COOT | Population | 30 |
| Iteration | 1500 | |
| R | [−1, 1] | |
| R1 | [0, 1] | |
| R2 | [0, 1] | |
| PSO | Population | 30 |
| Iteration | 1500 | |
| c1, c2 | 2 | |
| wmin | 0.2 | |
| wmax | 0.9 | |
| GWO | Population | 30 |
| Iteration | 1500 | |
| a | [2, 0] | |
| SSA | Population | 30 |
| Iteration | 1500 | |
| c1, c2, c3 | [0, 1] | |
| BOA | Population | 30 |
| Iteration | 1500 | |
| a | 0.1 | |
| c | 0.01 | |
| p | 0.6 | |
| SOA | Population | 30 |
| Iteration | 1500 | |
| A | [2, 0] | |
| fc | 2 | |
| SCA | Population | 30 |
| Iteration | 1500 | |
| a | 2 | |
| r1, r2, r3, r4 | [0, 1] |
| Function | Criteria | COOTCLCO | COOT | PSO | GWO | SSA | BOA | SOA | SCA |
|---|---|---|---|---|---|---|---|---|---|
| F1 | avg | 2.659 × 10−83 | 1.0898 × 10−31 | 4.6753 × 10−13 | 2.3081 × 10−90 | 8.514 × 10−09 | 2.4291 × 10−15 | 6.4176 × 10−43 | 0.00021788 |
| std | 1.4561 × 10−82 | 5.9691 × 10−31 | 1.5343 × 10−12 | 9.858 × 10−90 | 1.546 × 10−09 | 1.6651 × 10−16 | 1.831 × 10−42 | 0.0010654 | |
| W | / | + | + | ≈ | + | + | + | + | |
| R | 2 | 4 | 6 | 1 | 7 | 5 | 3 | 8 | |
| F2 | avg | 6.2512 × 10−36 | 6.4608 × 10−21 | 1.2222 × 10−05 | 1.4253 × 10−52 | 0.81098 | 1.6096 × 10−12 | 3.8153 × 10−27 | 2.9312 × 10−08 |
| std | 3.3024 × 10−35 | 3.5387 × 10−20 | 3.694 × 10−05 | 2.1289 × 10−52 | 1.0753 | 1.3002 × 10−13 | 9.4533 × 10−27 | 6.6456 × 10−08 | |
| W | / | + | + | − | + | + | ≈ | + | |
| R | 2 | 4 | 7 | 1 | 8 | 5 | 3 | 6 | |
| F3 | avg | 3.5233 × 10−77 | 6.9729 × 10−38 | 0.19834 | 3.1175 × 10−23 | 30.5211 | 2.09 × 10−15 | 6.7979 × 10−23 | 2114.2643 |
| std | 1.9298 × 10−76 | 3.8192 × 10−37 | 0.10306 | 1.573 × 10−22 | 25.2264 | 1.5103 × 10−16 | 1.5973 × 10−22 | 2264.7997 | |
| W | / | + | + | + | + | + | + | + | |
| R | 1 | 2 | 6 | 4 | 7 | 5 | 3 | 8 | |
| F4 | avg | 1.7579 × 10−29 | 5.3006 × 10−22 | 0.065309 | 3.1451 × 10−22 | 5.0517 | 1.8376 × 10−12 | 1.4693 × 10−13 | 10.2213 |
| std | 9.6209 × 10−29 | 2.8788 × 10−21 | 0.026898 | 4.7313 × 10−22 | 2.7223 | 1.1907 × 10−13 | 3.593 × 10−13 | 8.0463 | |
| W | / | ≈ | + | ≈ | + | + | + | + | |
| R | 1 | 2 | 6 | 3 | 7 | 5 | 4 | 8 | |
| F5 | avg | 27.8032 | 49.0883 | 30.6025 | 26.5966 | 160.312 | 28.9041 | 27.9173 | 40.7895 |
| std | 0.22848 | 64.9583 | 17.6035 | 0.91726 | 312.6524 | 0.025756 | 0.73362 | 50.9841 | |
| W | / | + | + | − | + | + | ≈ | + | |
| R | 2 | 7 | 5 | 1 | 8 | 4 | 3 | 6 | |
| F6 | avg | 0.0027052 | 0.0011474 | 8.5311 × 10−13 | 0.64475 | 9.294 × 10−09 | 5.0655 | 3.2155 | 4.3367 |
| std | 0.001689 | 0.0006967 | 3.7915 × 10−12 | 0.34548 | 2.227 × 10−09 | 0.63497 | 0.44021 | 0.41554 | |
| W | / | − | − | + | − | + | + | + | |
| R | 4 | 3 | 1 | 5 | 2 | 8 | 6 | 7 | |
| F7 | avg | 0.0012201 | 0.0016025 | 0.029791 | 0.00052173 | 0.06215 | 0.00063614 | 0.00071636 | 0.018585 |
| std | 0.0010915 | 0.0012723 | 0.0095664 | 0.00031804 | 0.026099 | 0.00021572 | 0.00056061 | 0.016281 | |
| W | / | ≈ | + | − | + | − | − | + | |
| R | 4 | 5 | 7 | 1 | 8 | 2 | 3 | 6 | |
| F8 | avg | −9259.1292 | −7727.7499 | −2947.3405 | −6119.6079 | −7766.648 | −4520.5507 | −5435.957 | −3978.2828 |
| std | 746.799 | 843.0888 | 528.7386 | 453.4792 | 689.3375 | 324.7176 | 662.0541 | 259.1258 | |
| W | / | + | + | + | + | + | + | + | |
| R | 1 | 3 | 8 | 4 | 2 | 6 | 5 | 7 | |
| F9 | avg | 5.6843 × 10−15 | 4.3428 × 10−12 | 47.8575 | 0.38537 | 57.9397 | 29.8787 | 2.0138 | 11.9765 |
| std | 1.7345 × 10−14 | 2.3765 × 10−11 | 14.9651 | 1.4669 | 16.6952 | 68.3273 | 7.7314 | 21.3326 | |
| W | / | ≈ | + | + | + | + | + | + | |
| R | 1 | 2 | 7 | 3 | 8 | 6 | 4 | 5 | |
| F10 | avg | 4.1034 × 10−14 | 1.2819 × 10−13 | 9.0532 × 10−08 | 1.1191 × 10−14 | 1.8622 | 5.2254 × 10−13 | 19.9593 | 16.2366 |
| std | 1.5409 × 10−13 | 3.9915 × 10−13 | 1.7522 × 10−07 | 3.2788 × 10−15 | 0.87668 | 3.8682 × 10−13 | 0.0012739 | 7.4322 | |
| W | / | ≈ | + | ≈ | + | ≈ | + | + | |
| R | 1 | 4 | 5 | 2 | 6 | 3 | 8 | 7 | |
| F11 | avg | 3.7007 × 10−17 | 4.9516 × 10−15 | 9.4859 | 0.0018945 | 0.010581 | 3.7007 × 10−18 | 0.002286 | 0.26667 |
| std | 8.9073 × 10−17 | 2.6891 × 10−14 | 3.9401 | 0.0051435 | 0.010628 | 2.027 × 10−17 | 0.0092326 | 0.27876 | |
| W | / | + | + | + | + | − | + | + | |
| R | 2 | 3 | 8 | 4 | 6 | 1 | 5 | 7 | |
| F12 | avg | 2.5932 × 10−05 | 0.070101 | 0.34582 | 0.038975 | 5.4261 | 0.40324 | 0.2896 | 1.1145 |
| std | 1.7952 × 10−05 | 0.21764 | 0.50576 | 0.020464 | 4.5121 | 0.14044 | 0.1326 | 1.0823 | |
| W | / | + | + | + | + | + | + | + | |
| R | 1 | 3 | 5 | 2 | 8 | 6 | 4 | 7 | |
| F13 | avg | 0.0085188 | 0.015734 | 0.00036625 | 0.45024 | 0.5924 | 2.4769 | 1.9698 | 24.3547 |
| std | 0.011135 | 0.023316 | 0.002006 | 0.2401 | 3.2058 | 0.38948 | 0.15777 | 104.6906 | |
| W | / | + | − | + | + | + | + | + | |
| R | 2 | 3 | 1 | 4 | 5 | 7 | 6 | 8 | |
| +/≈/− | / | 8/4/1 | 11/2/0 | 7/3/3 | 12/0/1 | 10/1/2 | 10/2/1 | 13/0/0 | |
| Function | Criteria | COOTCLCO | COOT | PSO | GWO | SSA | BOA | SOA | SCA |
|---|---|---|---|---|---|---|---|---|---|
| F14 | avg | 0.998 | 0.998 | 1.6906 | 4.1922 | 0.998 | 1.0643 | 1.3948 | 1.3287 |
| std | 3.0018×10−16 | 2.2395 × 10−16 | 1.4911 | 4.4183 | 1.725 × 10−16 | 0.36262 | 0.80721 | 0.75206 | |
| W | / | ≈ | + | + | ≈ | + | + | + | |
| R | 1 | 2 | 7 | 8 | 3 | 4 | 6 | 5 | |
| F15 | avg | 0.00046961 | 0.00064839 | 0.0004961 | 0.005088 | 0.00082478 | 0.00032609 | 0.0011046 | 0.00081571 |
| std | 0.00020712 | 0.00031895 | 0.00039601 | 0.0085754 | 0.00024494 | 1.7582×10−05 | 0.00031781 | 0.00030811 | |
| W | / | + | ≈ | + | + | − | + | + | |
| R | 2 | 4 | 3 | 8 | 6 | 1 | 7 | 5 | |
| F16 | avg | −1.0316 | −1.0316 | −1.0316 | −1.0316 | −1.0316 | −1.0316 | −1.0316 | −1.0316 |
| std | 6.8377×10−16 | 1.8251 × 10−12 | 6.7752 × 10−16 | 2.3368 × 10−09 | 3.931 × 10−15 | 1.0339 × 10−05 | 1.4916 × 10−07 | 1.4874 × 10−05 | |
| W | / | ≈ | ≈ | ≈ | ≈ | + | + | + | |
| R | 1 | 4 | 2 | 5 | 3 | 8 | 6 | 7 | |
| F17 | avg | 0.39789 | 0.39789 | 0.39789 | 0.39789 | 0.39789 | 0.39823 | 0.3979 | 0.39841 |
| std | 0 | 1.2974 × 10−15 | 0 | 7.2275 × 10−08 | 2.070 × 10−15 | 0.00079194 | 1.0205 × 10−05 | 0.00052896 | |
| W | / | + | ≈ | + | ≈ | + | + | + | |
| R | 1 | 4 | 1 | 5 | 3 | 7 | 6 | 8 | |
| F18 | avg | 3 | 3 | 3 | 3 | 3 | 3.0112 | 3 | 3 |
| std | 3.2769×10−15 | 1.5417 × 10−14 | 1.7916 × 10−15 | 7.3174 × 10−06 | 3.959 × 10−14 | 0.032131 | 1.9517 × 10−05 | 4.1425 × 10−05 | |
| W | / | + | ≈ | + | ≈ | + | + | + | |
| R | 1 | 4 | 2 | 5 | 3 | 8 | 7 | 6 | |
| F19 | avg | −0.30048 | −0.30048 | −3.8628 | −0.30048 | −0.30048 | −0.30048 | −0.30048 | −0.30048 |
| std | 2.2584 × 10−16 | 2.2584 × 10−16 | 2.7101×10−15 | 2.2584 × 10−16 | 2.259 × 10−16 | 2.2584 × 10−16 | 2.2584 × 10−16 | 2.2584 × 10−16 | |
| W | / | ≈ | − | + | ≈ | + | + | + | |
| R | 2 | 3 | 1 | 7 | 4 | 6 | 5 | 8 | |
| F20 | avg | −3.2982 | −3.2943 | −3.2625 | −3.277 | −3.2263 | −3.1381 | −2.7975 | −2.8919 |
| std | 0.04837 | 0.051146 | 0.060463 | 0.073544 | 0.048682 | 0.14729 | 0.54644 | 0.39914 | |
| W | / | ≈ | + | + | + | + | + | + | |
| R | 1 | 2 | 4 | 3 | 5 | 6 | 8 | 7 | |
| F21 | avg | −9.6924 | −9.2305 | −6.3881 | −9.1395 | −7.5573 | −9.0466 | −3.1981 | −3.0402 |
| std | 1.3421 | 2.1365 | 3.4666 | 2.0617 | 3.122 | 0.94949 | 3.9074 | 2.2051 | |
| W | / | + | + | + | + | + | + | + | |
| R | 1 | 2 | 6 | 3 | 5 | 4 | 7 | 8 | |
| F22 | avg | −9.5169 | −10.2271 | −6.578 | −10.4027 | −9.2863 | −9.4478 | −6.1925 | −3.9181 |
| std | 2.0147 | 0.96292 | 3.5147 | 0.00013733 | 2.584 | 1.1399 | 4.6827 | 1.9622 | |
| W | / | − | + | − | + | ≈ | + | + | |
| R | 3 | 2 | 6 | 1 | 5 | 4 | 7 | 8 | |
| F23 | avg | −9.7655 | −10.3577 | −8.1972 | −10.5362 | −9.4872 | −10.0631 | −8.1032 | −4.9455 |
| std | 1.8698 | 0.97874 | 3.6466 | 0.00010617 | 2.4332 | 0.3434 | 3.9097 | 1.9771 | |
| W | / | − | + | − | ≈ | − | + | + | |
| R | 4 | 2 | 6 | 1 | 5 | 3 | 7 | 8 | |
| +/≈/− | / | 4/4/2 | 5/4/1 | 7/1/2 | 4/6/0 | 7/1/2 | 10/0/0 | 10/0/0 | |
| Result | COOTCLCO | COOT | PSO | GWO | SSA | BOA | SOA | SCA |
|---|---|---|---|---|---|---|---|---|
| +/≈/− | / | 12/8/3 | 16/6/1 | 14/4/5 | 16/6/1 | 17/2/4 | 20/2/1 | 23/0/0 |
| Average rank | 1.783 | 3.087 | 4.696 | 3.522 | 5.391 | 4.957 | 5.348 | 6.957 |
| Overall rank | 1 | 2 | 4 | 3 | 7 | 5 | 6 | 8 |
| Parameters | Values |
|---|---|
| Area of deployment | 100 m × 100 m |
| Sensing radius (Rs) | 10 m |
| Communication radius (Rc) | 20 m |
| Number of sensor nodes (q) | 25, 35, 45 |
| Number of iterations (Iteration) | 500, 1000, 1500 |
| Algorithm | q = 25 | q = 35 | q = 45 |
|---|---|---|---|
| Average Coverage Rate/% | Average Coverage Rate/% | Average Coverage Rate/% | |
| COOTCLCO | 75.329 | 90.332 | 96.990 |
| PSO | 72.999 | 80.383 | 87.336 |
| BOA | 62.718 | 74.634 | 83.102 |
| SOA | 69.066 | 82.752 | 90.802 |
| WOA | 69.913 | 83.947 | 91.600 |
| HHO | 73.831 | 89.115 | 95.680 |
| BES | 73.459 | 88.643 | 94.978 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Zhang, J.; Wei, W.; Qin, T.; Fan, Y.; Luo, X.; Yang, J. Research on Coverage Optimization in a WSN Based on an Improved COOT Bird Algorithm. Sensors 2022, 22, 3383. https://doi.org/10.3390/s22093383
Huang Y, Zhang J, Wei W, Qin T, Fan Y, Luo X, Yang J. Research on Coverage Optimization in a WSN Based on an Improved COOT Bird Algorithm. Sensors. 2022; 22(9):3383. https://doi.org/10.3390/s22093383
Chicago/Turabian StyleHuang, Yihui, Jing Zhang, Wei Wei, Tao Qin, Yuancheng Fan, Xuemei Luo, and Jing Yang. 2022. "Research on Coverage Optimization in a WSN Based on an Improved COOT Bird Algorithm" Sensors 22, no. 9: 3383. https://doi.org/10.3390/s22093383
APA StyleHuang, Y., Zhang, J., Wei, W., Qin, T., Fan, Y., Luo, X., & Yang, J. (2022). Research on Coverage Optimization in a WSN Based on an Improved COOT Bird Algorithm. Sensors, 22(9), 3383. https://doi.org/10.3390/s22093383