1. Introduction
Conical-shaped shells appear frequently in industrial applications, mainly in elements which have a relevant mechanical-structural function in sectors such as military, civil, nuclear and aerospace engineering. Specifically, highlighting aerospace applications, it is common to find truncated cone-shaped elements forming part of propulsion systems (turbine engines, injectors, nozzles) as well as fuselage structural elements (rocket fairing, droop nose in supersonic aircraft) [
1,
2]. These elements are generally subjected to large thermomechanical loadings, both static and dynamic (i.e., pressure loads distributed on their surface, vibrations, inertial forces, etc.), which cause severe deformations and can lead to aeroelastic effects and, subsequently, loss of control in flight and catastrophic failures. Therefore, it is necessary to carry out regulation of the vibration of these elements, in applications in which the mechanical properties can be found fixed by other material requirements, for instance, weight reduction and extreme environmental conditions. Then, it is necessary to carry out monitoring and, sometimes, acting on the movement to dampen oscillations. Piezoelectric sensors and actuators are a frequent solution in these practices [
3,
4,
5].
Not only is the application of piezoelectrics interesting for mechanical performance, but also for energy harvesting, which is of great interest in a current context in which the aerospace sector seeks green technologies free of fossil fuels. In this sense, different authors [
6,
7] have sought the use of piezoelectric patches to obtain an energy supply that can feed low-power devices. Li et al. [
7] performed an optimization of the size of the patches placed on conical shells. Firstly, the position where a mode reaches a larger strain was found, which results in higher modal voltage generated, and later the rectangular patch size that maximizes the generated voltage was determined. The theoretical development of the expressions is solved by applying the Rayleigh-Ritz numerical method. Aimmanee and Phongsitthisak [
6] also carried out a theoretical study on the energy harvesting capacity of a conical shell, in this particular case on a Belleville’s spring, as this is an element continuously subjected to alternating compressive loads. The analytical model, also solved by the Rayleight-Ritz method, is contrasted with commercial software based on the finite element method (FEM), using a piezoelectric layer that covers the entire analysed structure.
From the mechanical point of view, most of the articles in this regard [
1,
4,
8,
9] are based on the study of the free vibration of conical shells, to act on the natural oscillation modes under different displacement constraints. However, it should be noted that Li et al. [
10] analytically studied the forced vibrations of conical shells, obtaining the equations of motion under different external dynamic loads. Continuing this line, other works focus on using piezoelectric actuators to carry out active control of vibrations. Li et al. [
3] developed a genetic algorithm for placing a determined number of piezoelectric patches that mitigate forced vibration deformations, emphasizing the linear quadratic regulator (LQR) scheme. However, the scope and methodology used for the optimization of the location of patches is not detailed in depth. A work that brings this subject to the experimental field is carried out by Sun et al. [
11], where two pairs of piezoelectric ceramic patches are used as actuators/exciters and sensors. Numerical simulations of the natural vibrations of the structure are experimentally corroborated, and later an LQR is successfully applied to reduce the vibrations of a conical-shaped shell structure. However, the positioning of actuators and patches is determined arbitrarily, being located in areas where the amplitudes of the oscillations are higher.
Jamshidi and Jafari develop several works [
5,
8,
9,
12] on the subject of using piezoelectric actuators and sensors in conical shells for vibration control. In particular, [
8,
9] focused on designing the distribution of these piezoelectric elements through analytical relations based on the Kirchhoff–Love thin plate theory. Different patch distributions are applied in an ordered manner in longitudinal, circumferential or diagonal directions. However, the authors point out that these kinds of periodic distribution can reduce effectiveness, so they resort to the solution of having odd numbers of patches. In [
13], the fluid loading effect in piezoelectric cylindrical shells for acoustic problems is modelled. Elhami et al. [
14] study the wave propagation in air-filled double-walled cylindrical shells, including the piezoelectric effect (direct and inverse) to use piezoelectric patches as sensors and actuators, respectively.
Regarding the conical structures analysed in previous works, it should be noted that the reproduced boundary conditions vary within a series of typical cases, which can reproduce different real situations. Specifically, works have been found in the referenced bibliography that study cases of clamped-free conditions [
3,
11], but other authors [
8,
9] indicate that simply-supported conditions at both ends are more interesting for the industrial field.
In general, the reduction of the size of the sensor increases the range of applications, with the counterpart also reducing the signal produced by the device. The optimization of the electric load acquires special relevance then. Lee and Moon [
15] carried out a pioneer work where piezoelectric transducers are applied. In this work, the distribution of patches is analytically studied for one-dimensional modal sensors. Donoso et al. [
16,
17] extended this work to modal filters, maximizing the electric charge through a linear optimization problem where the electrode profile is optimized. This idea, including the optimization of the host structure, is carried out in [
18,
19,
20] for static and modal cases, respectively. This article aims to extend all these previous works to conical-shaped sensors. The analysis is stated as a topology optimization problem, where the electrode profile is not restricted to simply shaped patches, as in previously mentioned studies. The problem proposed lacks constraints over the shape of the electrodes obtained, as this is out of the scope of the paper. If the reader is interested in taking into consideration manufacturing constraints, the method proposed in [
21] can be implemented. In this paper, the authors present an eigenvalue problem based on the graph theory to ensure the connectivity of each of the phases.
This work is divided into sections as follows.
Section 2 introduces the continuous formulation and the finite element model of the problem to be studied. The discretized optimization problem is described in
Section 3.
Section 4 is focused on analysing the optimal designs obtained. To conclude, the conclusion of this work is presented in
Section 5.
4. Numerical Examples
The domain design proposed is a conical-shaped shell, due to its applications in the aerospace industry. The geometry and material are based on the study by Sun et al. [
11]. The radii of the top and bottom sides are
mm and
mm, respectively. The height is
mm and the wall thickness
mm. The material used in the cone is aluminium with Young’s modulus
GPa, Poisson’s ratio
and mass density
. Due to the linear behaviour of the problem, the value of the piezoelectric constant is fixed to
.
The displacement field is computed in both case studies using the commercial software COMSOL Multiphysics 5.4 [
24] and checked with Abaqus 2019 [
25].
4.1. Static Case
Two different distributions of loads are studied in this section. Both correspond to different situations that can be found when this kind of sensors is used in the aerospace industry. In general, the real load state of a structure is a combination of the different cases presented in this paper, but our objective is to analyse the results separately.
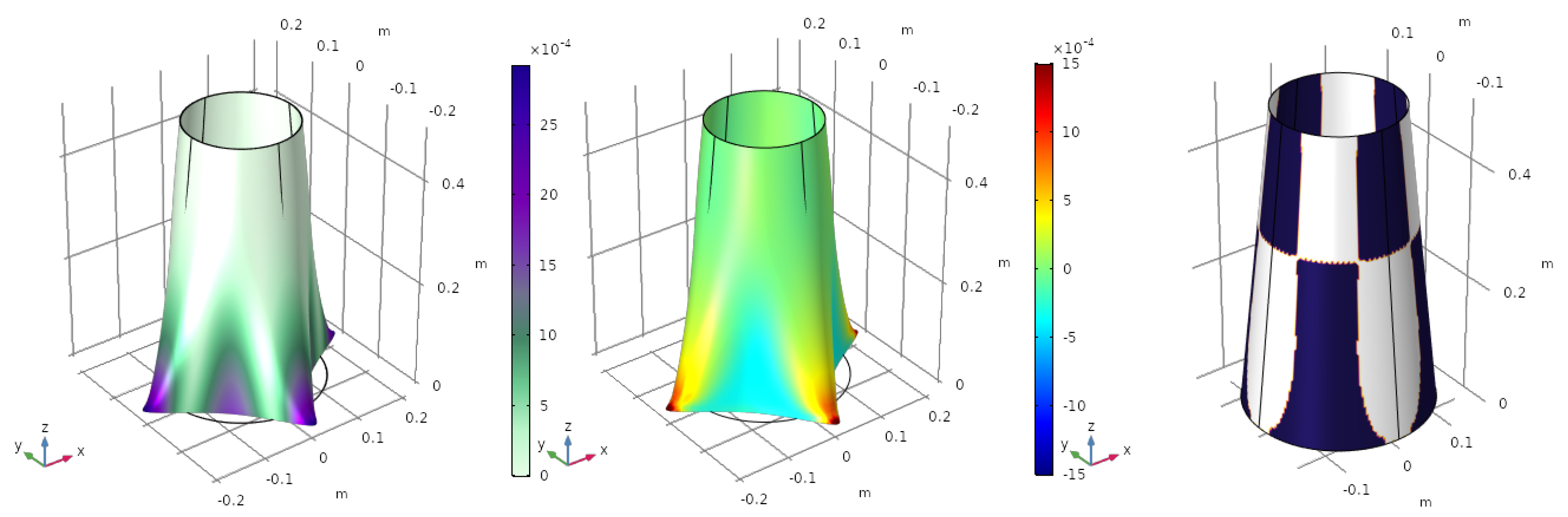
4.1.1. Pressure Uniformly Distributed
The objective of this section is to analyse the behaviour of the structure when it is subjected to a constant pressure load over its entire surface, simulating pressurization. The displacement at the meridional direction of the cone is fixed on the top edge. The pressure applied is
Pa (positive referring to external compressive pressure). The deformed structure, the mapping of the electric charge and the optimized electrode profile are depicted in
Figure 1.
The displacement is scaled to be able to see the deformation of the structure. The value of
(the electric charge depends linearly on it) in each point of the surface is shown in
Figure 1 (centre). The electrode profile is homogeneous,
, meaning that the whole structure is covered with a unique electrode with the same polarity (blue colour in
Figure 1 (right)). The total electric charge generated by the sensor is
C. Thanks to the assumption of linear elasticity, and the linear dependence of the objective function with the variable
, a change in the sign of the pressure
, leads us to a change in the sign of the electrode profile
. In such a case, the electric charge remains constant.
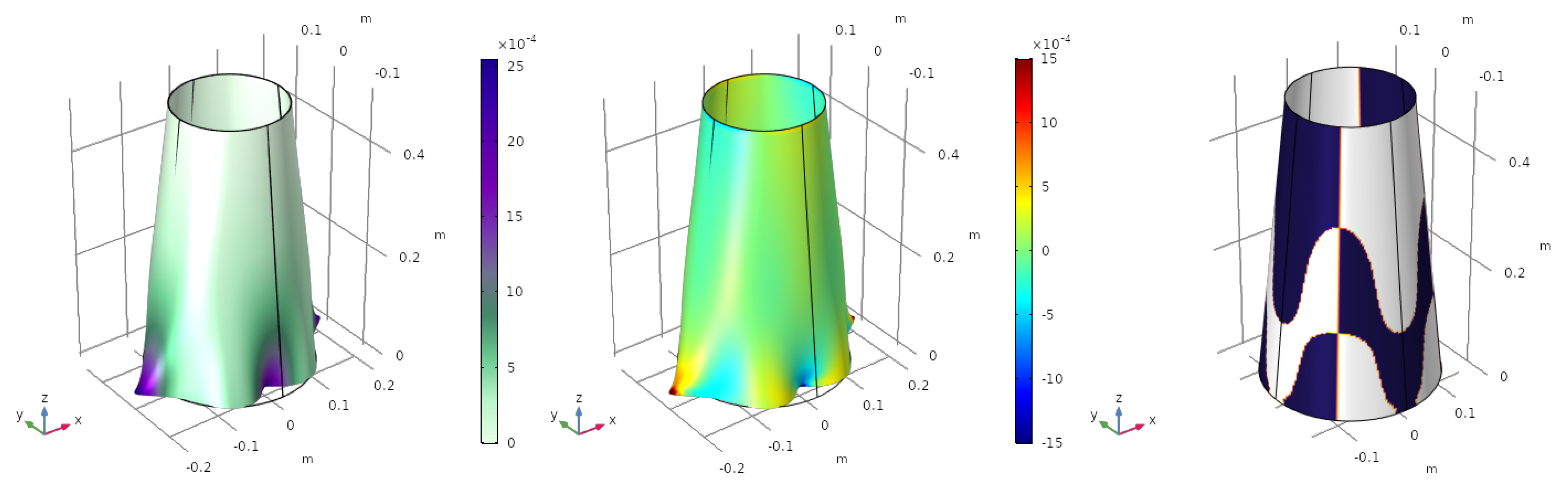
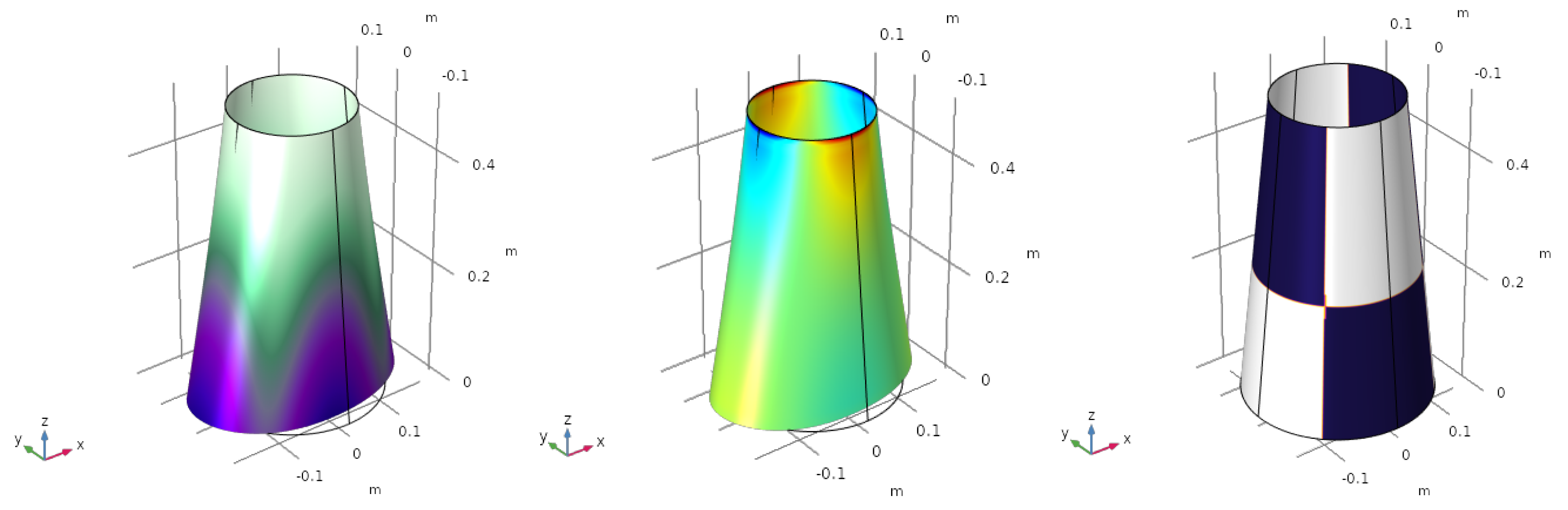
4.1.2. Punctual Forces
In this loading scenario, the boundary of the upper side of the cone is clamped, i.e., the rotations and the displacements are fixed, while the rest of the structure is free. The punctual forces are applied at four points equally distributed around the bottom edge. For the first load case, the forces are pointing away from the cone, with a value of
N. The deformed shell and the optimized electrode are shown in
Figure 2.
The value of the electric charge generated by the sensor is
C. The displacement shown in
Figure 2 is scaled by a factor of 20, otherwise, the deformation would be too small to appreciate the deformed shape.
The violet colour in the deformation (
Figure 2 (left)) represents the biggest displacement (in magnitude), while the white part shows the smallest one, near the boundary conditions. The electrode profile (
Figure 2 (right)) does not map the displacement field, but the curvature of the structure, in the sense that the value of the variable
is directly related with the sign of
. Blue and white represent electrodes with opposite polarization. The sign of the variable is computed element by element, and then interpolated to the whole surface. This means that in very small areas,
can take null values where
(orange colour in
Figure 2 (right)). These could be taken as small gaps that are also needed to avoid short circuits.
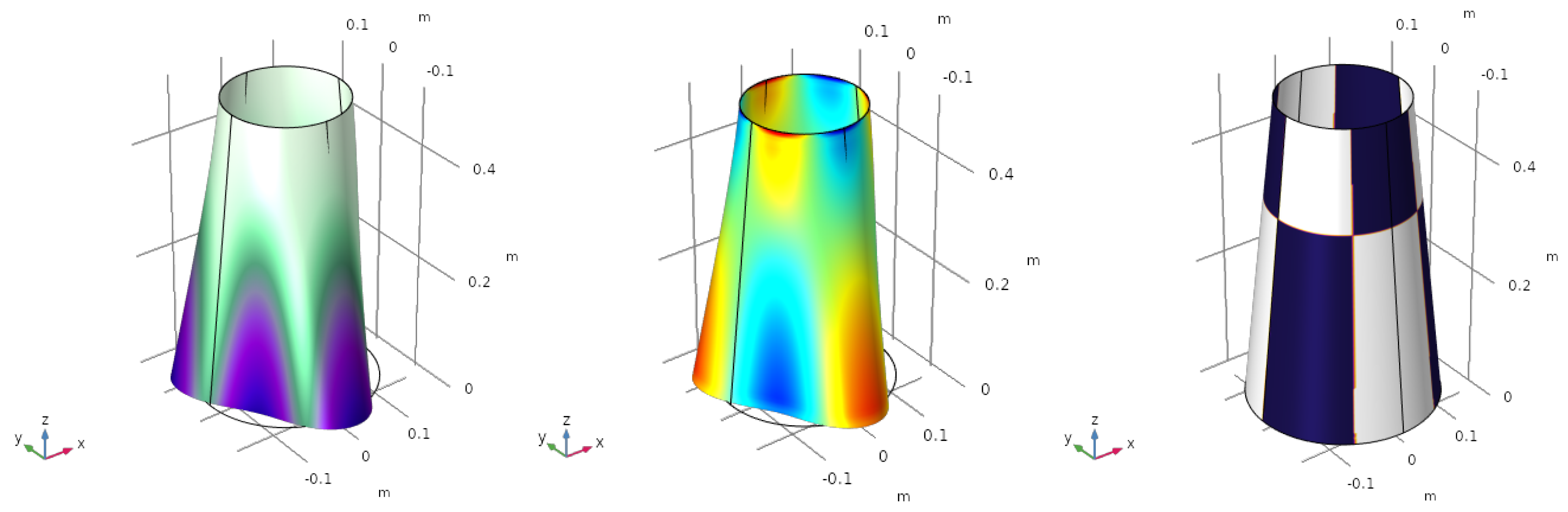
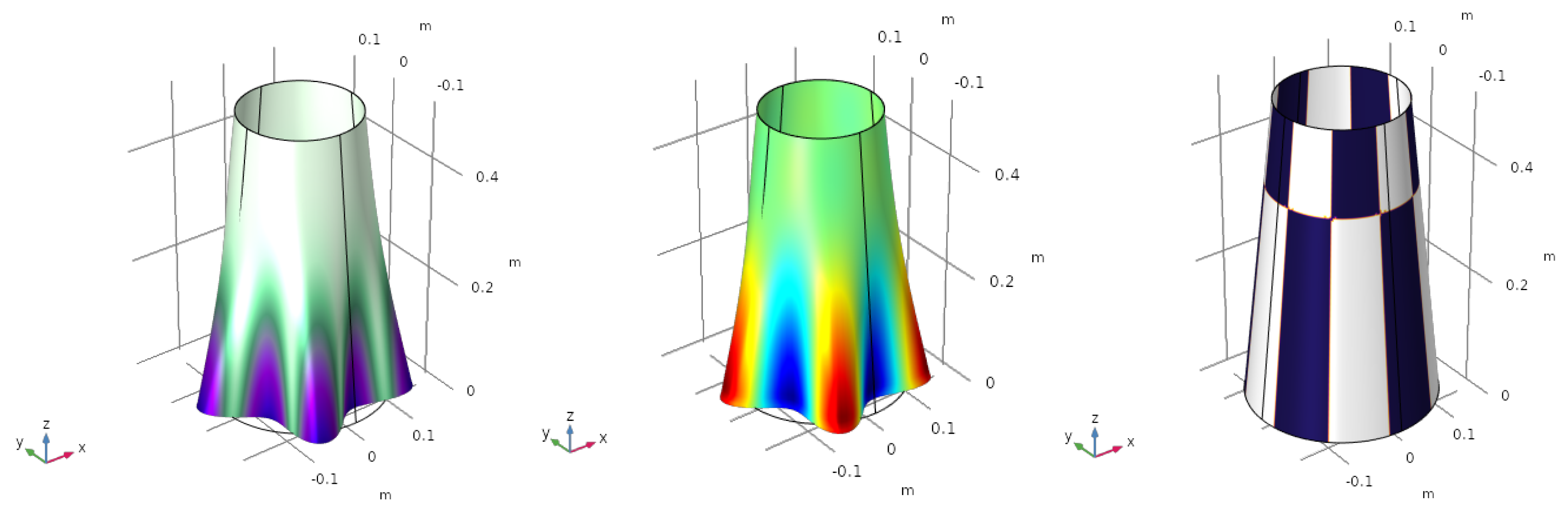
A second load case is presented in
Figure 3. The two forces applied over the
y-axis change their sense of application.
As happened in the previous case, small parts of the surface exhibit , where an alternation of the polarization of the electrode occurs. The value of the objective function, in this case, is C.
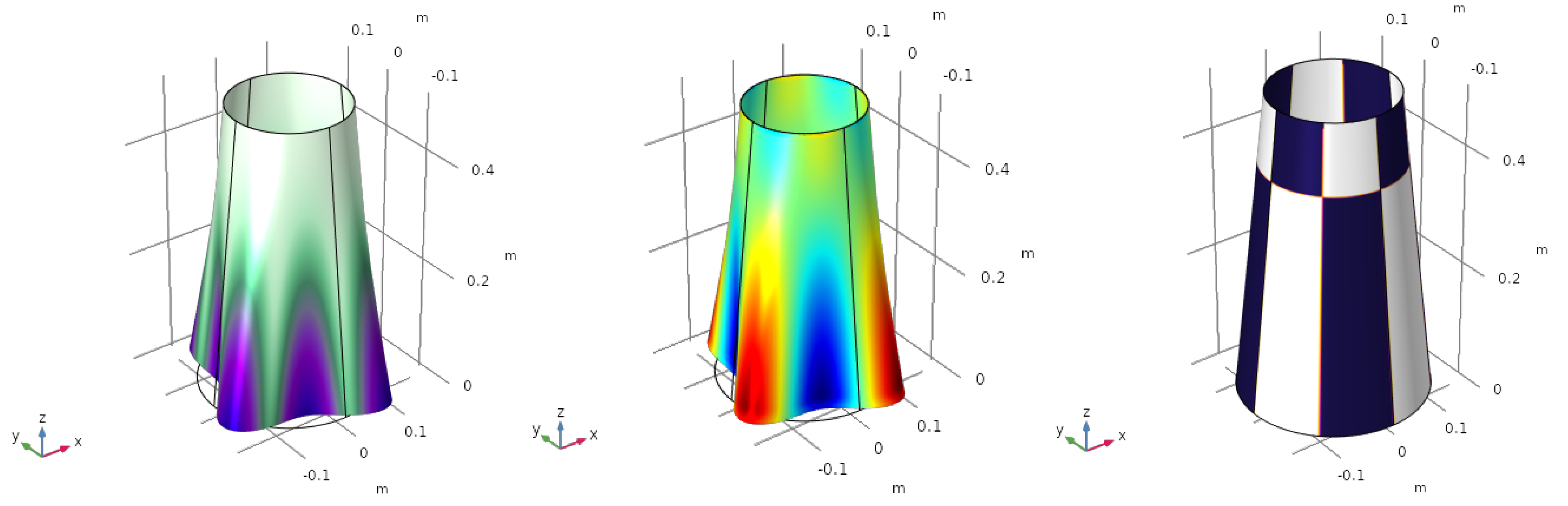
4.2. Vibration Modes
The electrode profile for the first four vibration modes (with increasing natural frequencies) is obtained in this section. Once again, the cone is clamped at its upper side. The mode shapes (eigenvectors of the equilibrium equation) are
M-orthonormalized:
This means that the amplitude of the vibration is fixed by this normalization, and then, the electric charge produced by different vibration modes cannot be compared. It is convenient to establish a different normalization to check that the optimized electrode profile is improving the response of the sensor. With this objective, a first attempt at normalizing the objective function is presented:
The parameter
directly give information about the improvement of the electric charge produced when the electrode profile is optimized for the
i-th vibration mode. The main issue using this normalization is the symmetry of the vibration mode, in the way that parts with different polarities are compensated, and then, the electric charge generated is close to zero. Therefore, the normalization with respect to the maximum displacement of the mode shape is proposed:
The parameter gives us information about the charge produced per unit of displacement, but it is important to remark that this is not comparable between the two modes.
For the first vibration mode,
, the mode shape, the mapping of the electric charge and the electrode profile are shown in
Figure 4.
The value of objective function is C/m. The value of the charge depicted in the centre figure is normalized, meaning that red and blue colours represent an electric charge of 1 and , respectively.
Firstly, note that the modal shapes and frequencies correspond with the work of Sun et al. [
11], which serves to verify the results obtained with our numerical model. Secondly, the modal charges produced for each vibration mode are:
C/m,
C/m and
C/m. Although these values have no real physical meaning as they depend on the eigenvector, they may be used in a modal decomposition to compute the participation of each vibration mode.
5. Conclusions
This work presents the relationship between the deformation obtained in a cone-shaped sensor and the electric charge collected. The electrode profile placed over the piezoelectric layer is optimized to maximize the electric response of the device.
Considering real applications in the aerospace industry, two different study cases are analysed: static loading and vibration modes. The former is divided into two situations, pressure uniformly distributed and punctual loads applied at the bottom edge. In general, the sensor will be subjected to both kinds of forces, although they are studied independently. The latter analyses are based on the free vibration of the cone, to compute the participation of each mode for a pure dynamic case.
Although a fully realistic loading situation has not been included in the paper, the method proposed can optimize the electrode profile when static and dynamic forces are applied. This combination of cases will produce a deformation that is the control of the optimization problem.
In both cases, the electric behaviour of the sensor is optimized through a tri-level function that represents the polarity of the electrode profile. It is demonstrated from the analytical expressions, that the sign of this variable (electrode) must coincide with the sign of the sum of in-plane strains, to maximize the objective function.
The sensor is modelled under the assumption of the linear elasticity theory for thin conical shells, but it could be extended to other geometries, large displacements (geometrically non-linear modelling) and/or large strains.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






