
Method for Using IMU-Based Experimental Motion Data in BVH Format for Musculoskeletal Simulations via OpenSim

 , , , and
, , , and
Abstract
:1. Introduction
1.1. General Background
1.2. State of the Art
1.3. Research Gap & Objective
2. Materials and Methods
2.1. BVH-Based Inverse Kinematics
- (1)
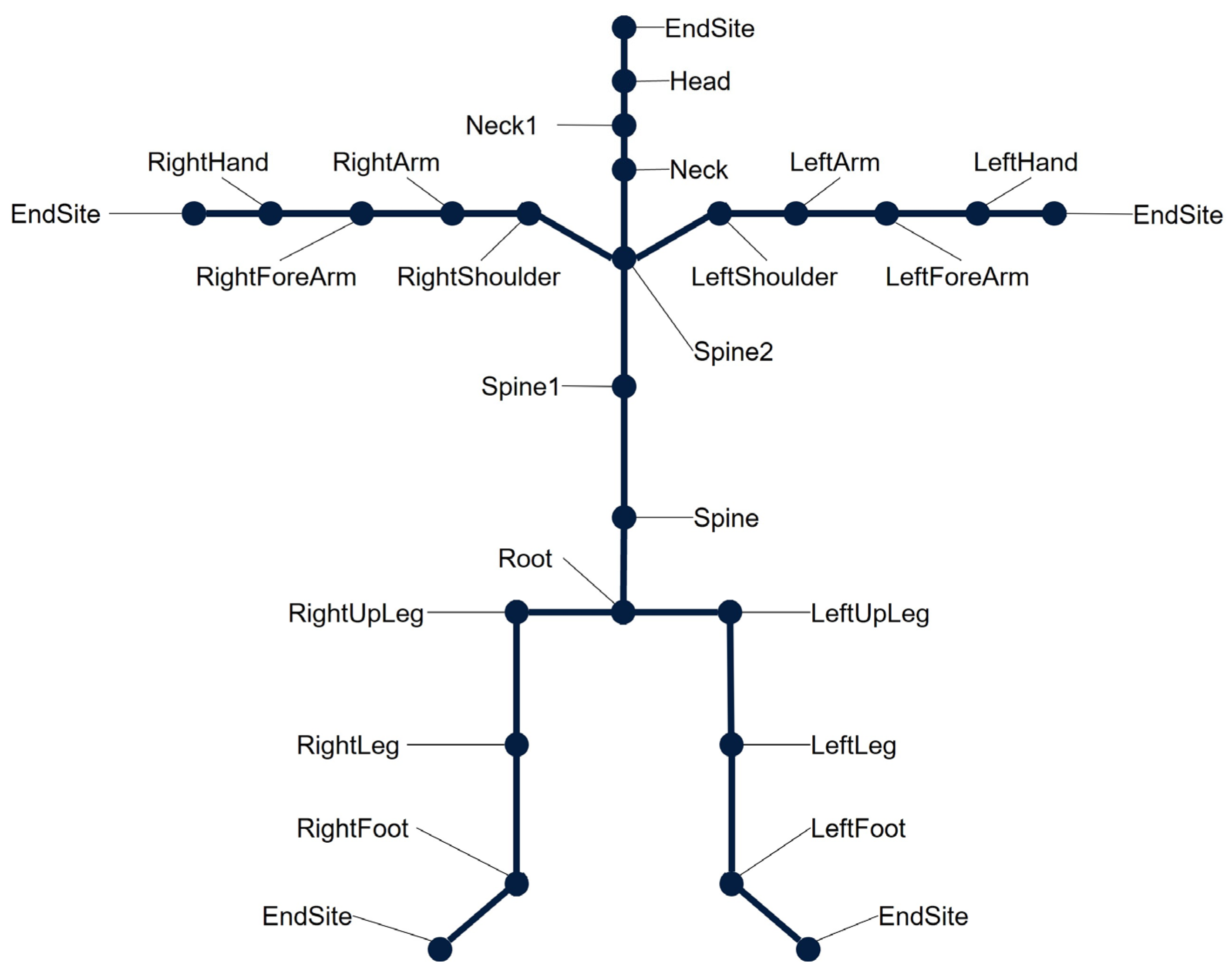
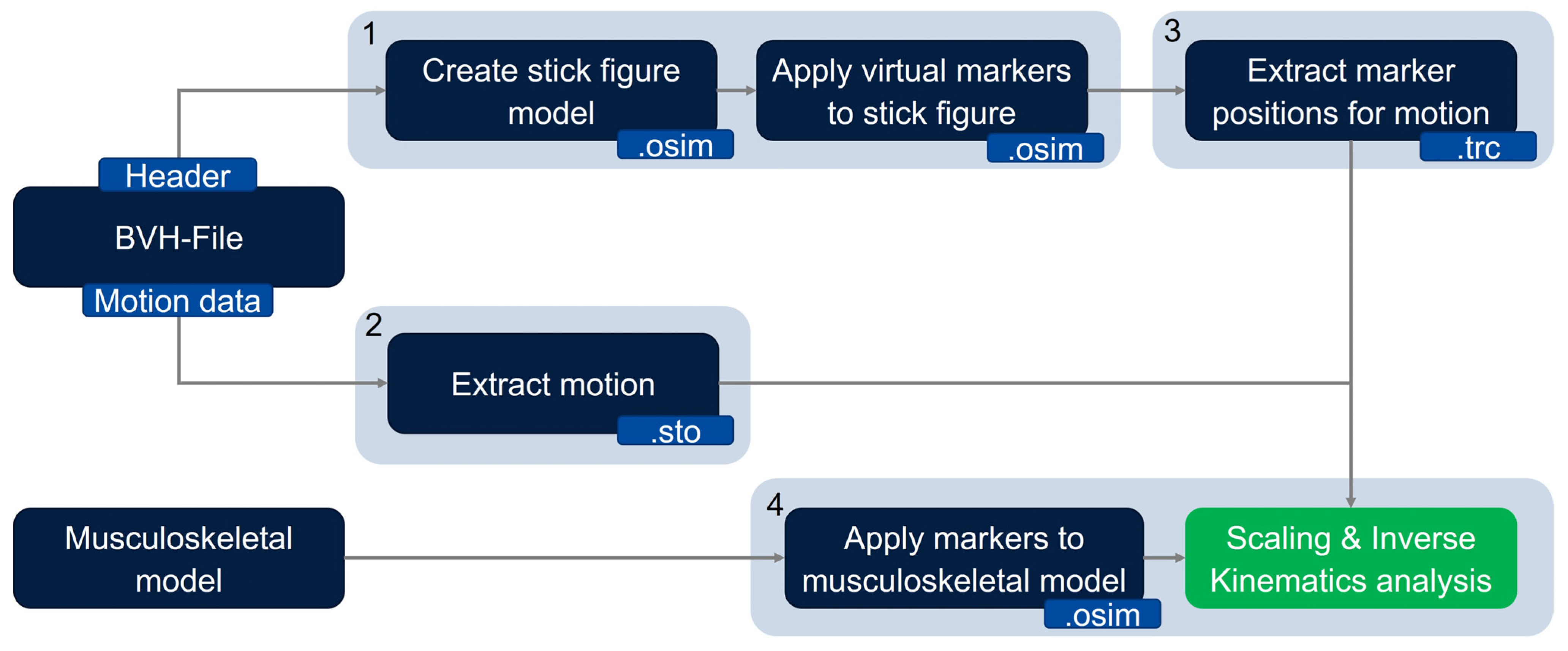
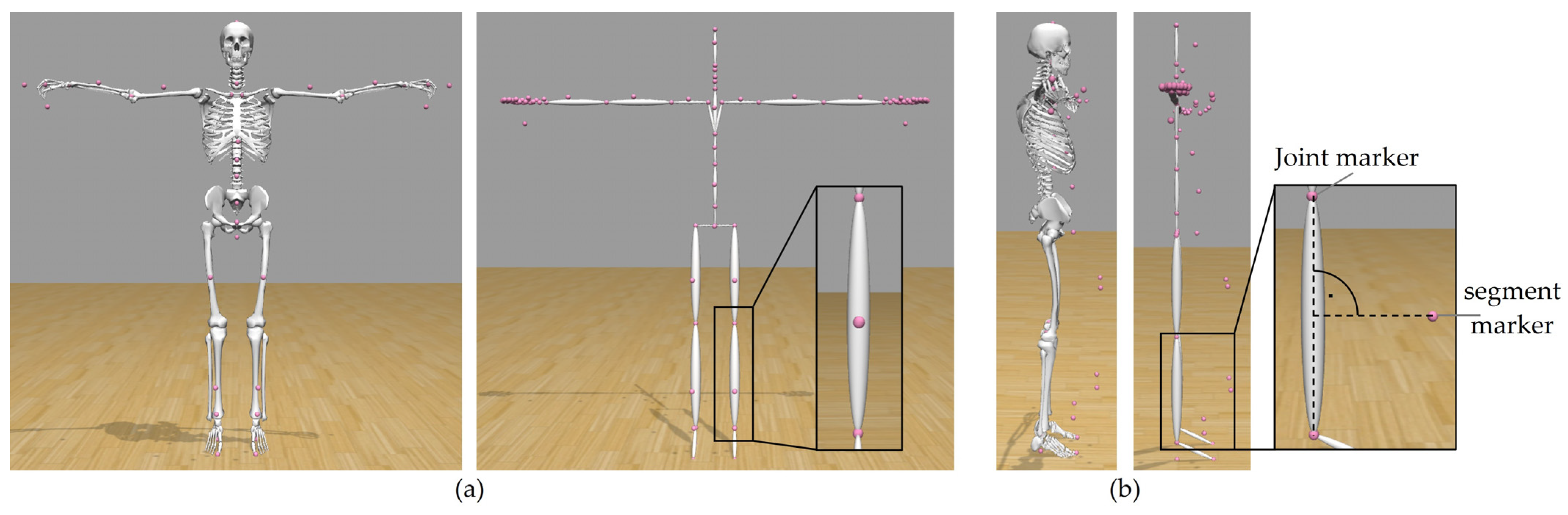
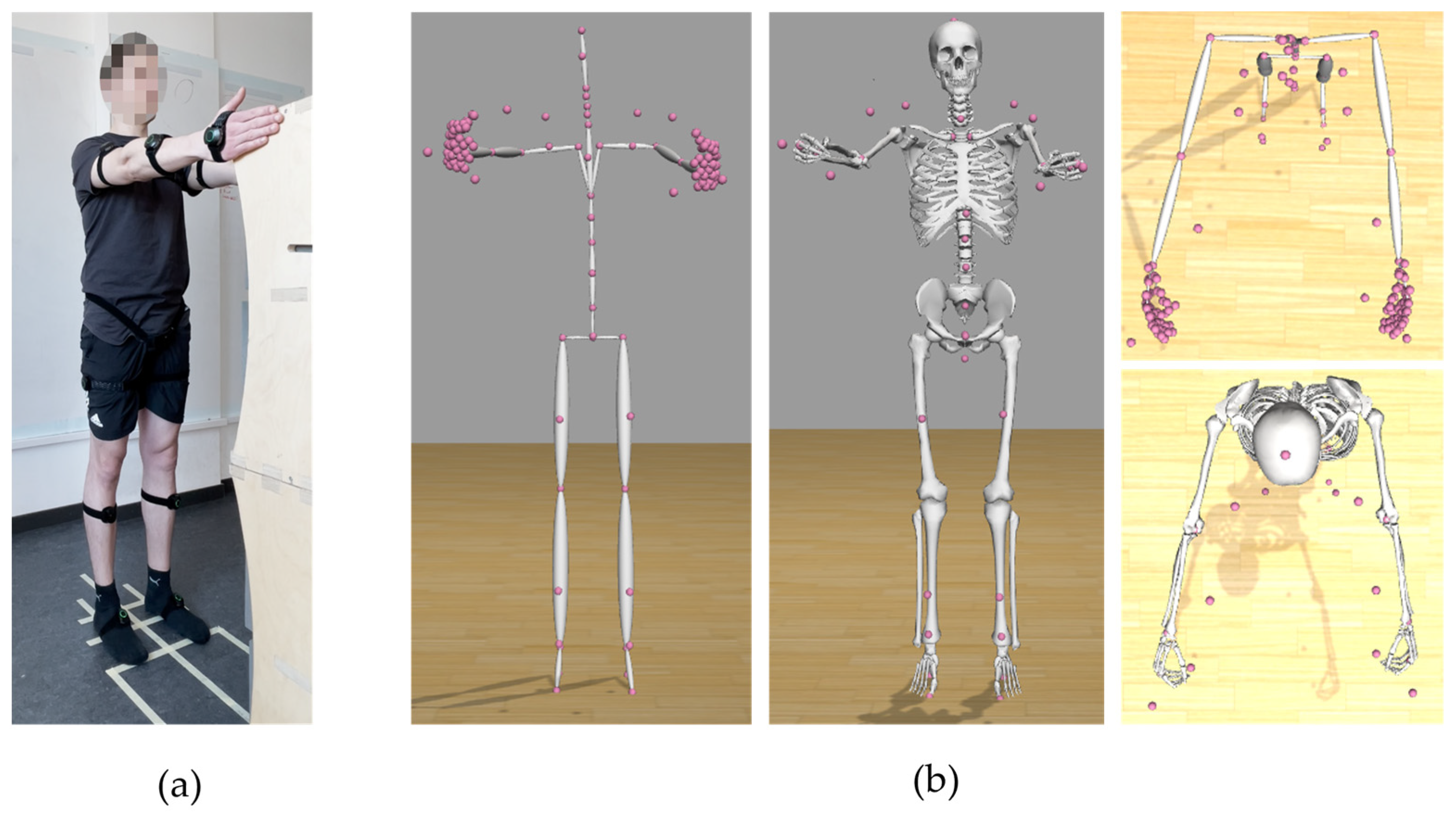
- In the first step, the header part of the BVH file is used to create a stick figure model in OpenSim, which represents the skeleton information of the BVH file. Hereby, each segment of the skeleton is represented by an ellipsoid. The initial joint is the root joint, which is implemented as a 6 degrees of freedom (DOF) free joint between the model and the ground. Each following joint is implemented as a 3 degrees of freedom ball joint. Thus, the exact number of degrees of freedom of the model depends on the number of joints, which again depends on the skeleton hierarchy of the BVH file. After the stick figure model has been created, virtual markers are placed onto the stick figure model. The markers are placed into the rotation centers of each joint, and for each segment, one virtual marker is placed outward of the segment in order to be able to measure translations and rotations for every coordinate axis (see Figure 3).
- (2)
- The motion data contained in the BVH file is converted into the sto file format, which is readable by OpenSim. For that, the data are recalculated to match the OpenSim ball joint definition. For each 3 DOF joint, the sto file contains three joint angle values for every time frame. For the root joint, information about 6 degrees of freedom is stored (three joint angle values and three translation values).
- (3)
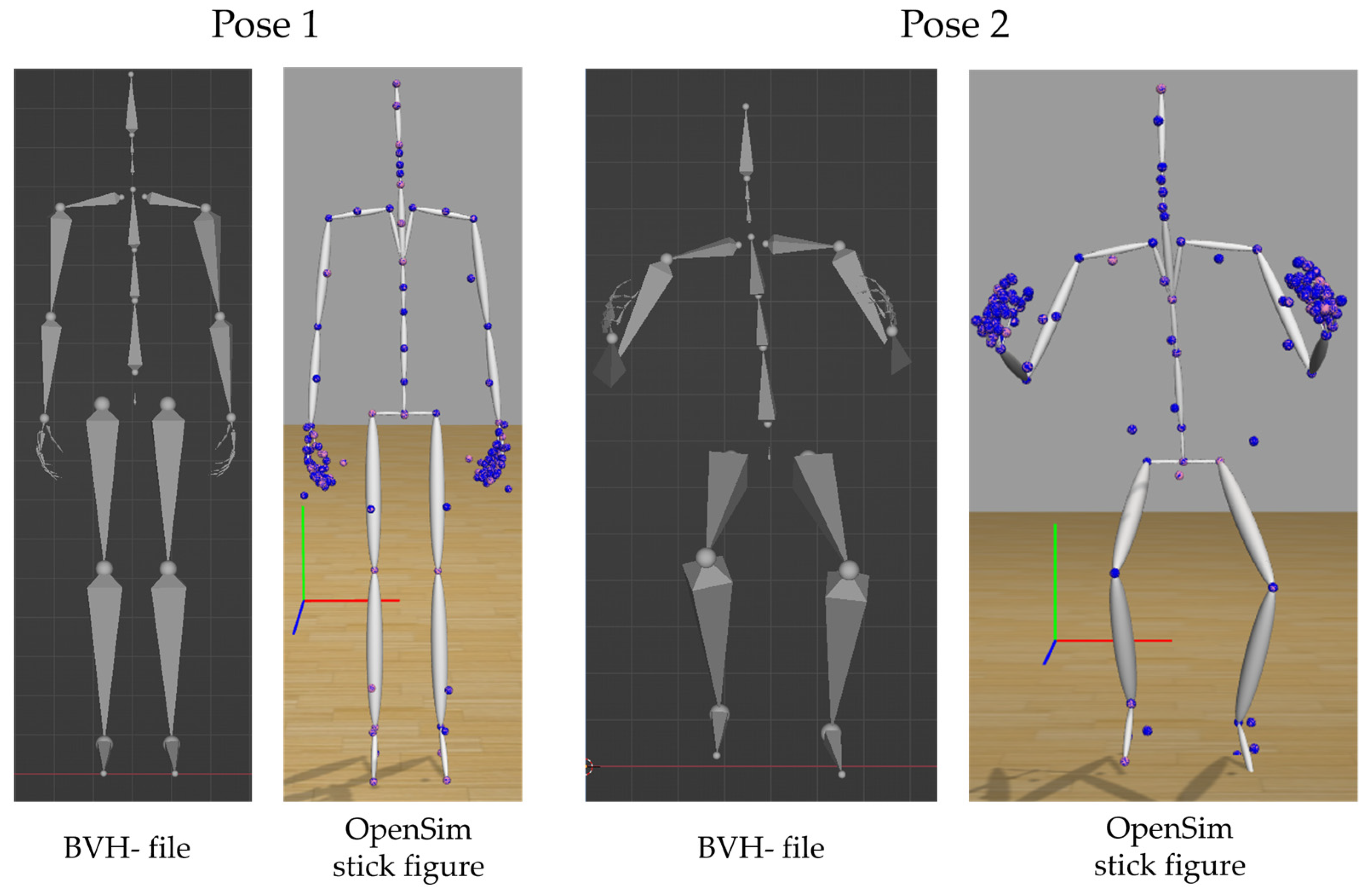
- Using the sto motion data, the stick figure can execute the experimentally measured motion. For each time step, the position of each virtual marker with respect to the global coordinate system is extracted and saved into a trc marker file. This file then corresponds to marker trajectory files measured by a conventional marker-based motion capture process.
- (4)
- To scale the generic musculoskeletal model, motion data measurements of a person standing in static T-pose are necessary. These data can then be used to perform the conventional marker-based scaling approach of OpenSim. In order to do that, markers corresponding to the virtual markers placed onto the stick figure have been placed on a generic musculoskeletal OpenSim model. The joint markers of the stick figure are placed in the origin of body frames of the model in which the corresponding joints are defined. The stick figure’s segment markers are placed in body frames so that their position is perpendicular to the connecting line of the joint markers between which the segment marker is placed (see Figure 3). The virtual markers are then used analogously to experimental marker data. Consequently, the generic musculoskeletal model is scaled by the marker data extracted from the OpenSim stick figure in the previous step. Each segment of the musculoskeletal model is scaled such that the distance between model markers () matches the distance between the virtual markers () on the OpenSim stick figure model. To do so, scaling factors () are computed using Equation (1)Afterwards, an inverse kinematics analysis is conducted.
2.2. Participants
2.3. Instrumentation
2.4. Experimental Protocol
2.5. Perception Neuron BVH Model
2.6. Verification Measures
3. Results
3.1. Anthropometric Measurements
3.1.1. Comparison with Manual Measurements—BVH File
3.1.2. Comparison with Manual Measurements—Musculoskeletal Model
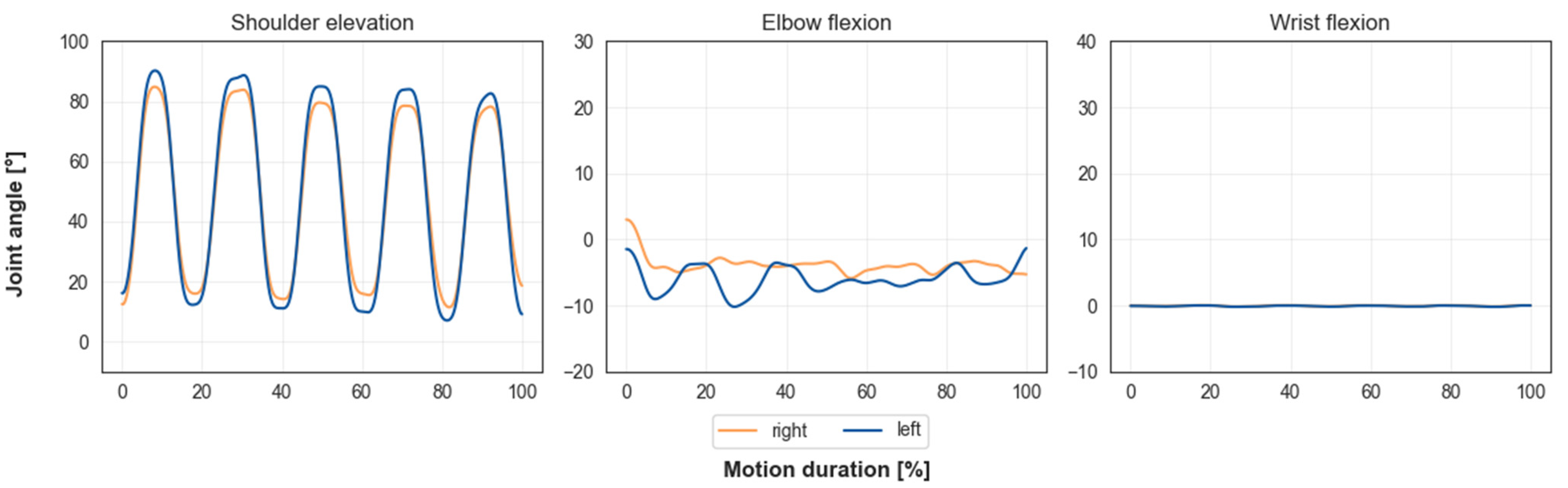
3.2. Motion Extraction & Transfer
3.3. Hand Position Analysis
3.4. Kinematic Transferability
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ishikawa, M.; Kuriyama, S.; Ito, H.; Furu, M.; Nakamura, S.; Matsuda, S. Kinematic alignment produces near-normal knee motion but increases contact stress after total knee arthroplasty: A case study on a single implant design. Knee 2015, 22, 206–212. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rüdiger, H.A.; Guillemin, M.; Latypova, A.; Terrier, A. Effect of changes of femoral offset on abductor and joint reaction forces in total hip arthroplasty. Arch. Orthop. Trauma Surg. 2017, 137, 1579–1585. [Google Scholar] [CrossRef] [PubMed]
- Leher, I.; Fleischmann, C.; Scherb, D.; Kollerer, M.; Miehling, J.; Wartzack, S.; Sesselmann, S. Patient-Specific Modelling for Preoperative Estimation of Hip Mechanics for Improved Planning of Total Hip Endoprosthesis Using Multibody Simulations. In Human Interaction, Emerging Technologies and Future Systems V; Ahram, T., Taiar, R., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2022; pp. 1088–1096. ISBN 978-3-030-85539-0. [Google Scholar]
- Eberle, R.; Heinrich, D.; van den Bogert, A.J.; Oberguggenberger, M.; Nachbauer, W. An approach to generate noncontact ACL-injury prone situations on a computer using kinematic data of non-injury situations and Monte Carlo simulation. Comput. Methods Biomech. Biomed. Eng. 2019, 22, 3–10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bulat, M.; Korkmaz Can, N.; Arslan, Y.Z.; Herzog, W. Musculoskeletal Simulation Tools for Understanding Mechanisms of Lower-Limb Sports Injuries. Curr. Sport. Med. Rep. 2019, 18, 210–216. [Google Scholar] [CrossRef]
- Schiele, A.; van der Helm, F.C.T. Kinematic design to improve ergonomics in human machine interaction. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 456–469. [Google Scholar] [CrossRef] [PubMed]
- Zhou, L.; Li, Y.; Bai, S. A human-centered design optimization approach for robotic exoskeletons through biomechanical simulation. Robot. Auton. Syst. 2017, 91, 337–347. [Google Scholar] [CrossRef]
- Molz, C.; Yao, Z.; Sänger, J.; Gwosch, T.; Weidner, R.; Matthiesen, S.; Wartzack, S.; Miehling, J. A Musculoskeletal Human Model-Based Approach for Evaluating Support Concepts of Exoskeletons for Selected Use Cases. Proc. Des. Soc. 2022, 2, 515–524. [Google Scholar] [CrossRef]
- Eberle, R.; Heinrich, D.; Kaps, P.; Oberguggenberger, M.; Nachbauer, W. Effect of ski boot rear stiffness (SBRS) on maximal ACL force during injury prone landing movements in alpine ski racing: A study with a musculoskeletal simulation model. J. Sport. Sci. 2017, 35, 1125–1133. [Google Scholar] [CrossRef] [PubMed]
- Dorschky, E.; Krüger, D.; Kurfess, N.; Schlarb, H.; Wartzack, S.; Eskofier, B.M.; van den Bogert, A.J. Optimal control simulation predicts effects of midsole materials on energy cost of running. Comput. Methods Biomech. Biomed. Eng. 2019, 22, 869–879. [Google Scholar] [CrossRef] [PubMed]
- Grujicic, M.; Pandurangan, B.; Xie, X.; Gramopadhye, A.K.; Wagner, D.; Ozen, M. Musculoskeletal computational analysis of the influence of car-seat design/adjustments on long-distance driving fatigue. Int. J. Ind. Ergon. 2010, 40, 345–355. [Google Scholar] [CrossRef]
- Kurpiers, N.; Petrone, N.; Supej, M.; Wisser, A.; Hansen, J.; Kersting, U.G. Application of Inertial Motion Unit-Based Kinematics to Assess the Effect of Boot Modifications on Ski Jump Landings—A Methodological Study. Sensors 2020, 20, 3805. [Google Scholar] [CrossRef] [PubMed]
- Luinge, H.J.; Veltink, P.H. Measuring orientation of human body segments using miniature gyroscopes and accelerometers. Med. Biol. Eng. Comput. 2005, 43, 273–282. [Google Scholar] [CrossRef] [PubMed]
- Roetenberg, D.; Luinge, H.J.; Slycke, P. Xsens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors. Available online: http://www.xsens.com (accessed on 13 April 2023).
- Zhang, J.-T.; Novak, A.C.; Brouwer, B.; Li, Q. Concurrent validation of Xsens MVN measurement of lower limb joint angular kinematics. Physiol. Meas. 2013, 34, N63–N69. [Google Scholar] [CrossRef] [PubMed]
- Al Borno, M.; O’Day, J.; Ibarra, V.; Dunne, J.; Seth, A.; Habib, A.; Ong, C.; Hicks, J.; Uhlrich, S.; Delp, S. OpenSense: An open-source toolbox for inertial-measurement-unit-based measurement of lower extremity kinematics over long durations. J. Neuroeng. Rehabil. 2022, 19, 22. [Google Scholar] [CrossRef] [PubMed]
- Stanev, D.; Filip, K.; Bitzas, D.; Zouras, S.; Giarmatzis, G.; Tsaopoulos, D.; Moustakas, K. Real-Time Musculoskeletal Kinematics and Dynamics Analysis Using Marker- and IMU-Based Solutions in Rehabilitation. Sensors 2021, 21, 1804. [Google Scholar] [CrossRef] [PubMed]
- Pizzolato, C.; Reggiani, M.; Modenese, L.; Lloyd, D.G. Real-time inverse kinematics and inverse dynamics for lower limb applications using OpenSim. Comput. Methods Biomech. Biomed. Eng. 2017, 20, 436–445. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karatsidis, A.; Jung, M.; Schepers, H.M.; Bellusci, G.; de Zee, M.; Veltink, P.H.; Andersen, M.S. Musculoskeletal model-based inverse dynamic analysis under ambulatory conditions using inertial motion capture. Med. Eng. Phys. 2019, 65, 68–77. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Noitom Ltd. Perception Neuron Studio AXIS STUDIO: User Guide. Available online: https://support.neuronmocap.com/hc/en-us/articles/10037078429595-Axis-Neuron-User-Guide (accessed on 6 March 2023).
- Noitom Ltd. Axis Studio; Noitom Ltd.: Beijing, China, 2022. [Google Scholar]
- Saul, K.R.; Hu, X.; Goehler, C.M.; Vidt, M.E.; Daly, M.; Velisar, A.; Murray, W.M. Benchmarking of dynamic simulation predictions in two software platforms using an upper limb musculoskeletal model. Comput. Methods Biomech. Biomed. Eng. 2015, 18, 1445–1458. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chang, L.-R.; Anand, P.; Varacallo, M. Anatomy, Shoulder and Upper Limb, Glenohumeral Joint; StatPearls Publishing LLC: Treasure Island, FL, USA, 2023. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Body Dimension [m] | Participant 1 | Participant 2 | Participant 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Manual * | BVH | Stick Figure | Manual | BVH | Stick Figure | Manual | BVH | Stick Figure | |
| Body height | 1.790 | 1.790 | 1.790 | 1.630 | 1.630 | 1.630 | 1.680 | 1.680 | 1.680 |
| Upper leg length | 0.420 | 0.420 | 0.420 | 0.390 | 0.390 | 0.390 | 0.390 | 0.390 | 0.390 |
| Lower leg length | 0.450 | 0.450 | 0.450 | 0.385 | 0.385 | 0.385 | 0.390 | 0.390 | 0.390 |
| Ankle height | 0.075 | 0.075 | 0.075 | 0.065 | 0.065 | 0.065 | 0.070 | 0.070 | 0.070 |
| Torso length | 0.590 | 0.590 | 0.590 | 0.540 | 0.540 | 0.540 | 0.580 | 0.580 | 0.580 |
| Upper arm length | 0.280 | 0.280 | 0.280 | 0.260 | 0.260 | 0.260 | 0.280 | 0.280 | 0.280 |
| Forearm length | 0.260 | 0.260 | 0.260 | 0.240 | 0.240 | 0.240 | 0.250 | 0.250 | 0.250 |
| Palm length | 0.190 | 0.184 | 0.184 | 0.170 | 0.165 | 0.165 | 0.180 | 0.174 | 0.174 |
| Head length | 0.155 | 0.155 | 0.155 | 0.150 | 0.150 | 0.150 | 0.145 | 0.145 | 0.145 |
| Body Dimension [m] | Participant 1 | Participant 2 | Participant 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Manual | BVH | OpenSim * | Manual | BVH | OpenSim | Manual | BVH | OpenSim | |
| Body height | 1.790 | 1.790 | 1.790 | 1.630 | 1.630 | 1.630 | 1.680 | 1.680 | 1.680 |
| Upper leg length | 0.420 | 0.420 | 0.420 | 0.390 | 0.390 | 0.390 | 0.390 | 0.390 | 0.390 |
| Lower leg length | 0.450 | 0.450 | 0.450 | 0.385 | 0.385 | 0.385 | 0.390 | 0.390 | 0.390 |
| Ankle height | 0.075 | 0.075 | 0.075 | 0.065 | 0.065 | 0.065 | 0.070 | 0.070 | 0.070 |
| Torso length | 0.590 | 0.590 | 0.590 | 0.540 | 0.540 | 0.540 | 0.580 | 0.580 | 0.580 |
| Upper arm length | 0.280 | 0.280 | 0.280 | 0.260 | 0.260 | 0.260 | 0.280 | 0.280 | 0.280 |
| Forearm length | 0.260 | 0.260 | 0.260 | 0.240 | 0.240 | 0.240 | 0.250 | 0.250 | 0.250 |
| Palm length | 0.190 | 0.184 | 0.184 | 0.170 | 0.165 | 0.165 | 0.180 | 0.175 | 0.175 |
| Head length | 0.155 | 0.155 | 0.155 | 0.150 | 0.150 | 0.150 | 0.145 | 0.145 | 0.145 |
| Dimension [m] | Participant 1 | Participant 2 | Participant 3 | |||
|---|---|---|---|---|---|---|
| Manual | Model | Manual | Model | Manual | Model | |
| Body height | 1.790 | 1.793 | 1.630 | 1.640 | 1.680 | 1.679 |
| Inseam height | 0.870 | 0.880 | 0.770 | 0.781 | 0.780 | 0.787 |
| Grip height (r) | 0.820 | 0.817 | 0.750 | 0.760 | 0.740 | 0.742 |
| Arm span width | 1.770 | 1.779 | 1.600 | 1.596 | 1.685 | 1.694 |
| Pose | Wrist Joint Marker | Knee Joint Marker | Ankle Joint Marker | |||
|---|---|---|---|---|---|---|
| Stick Figure | BVH | Stick Figure | BVH | Stick Figure | BVH | |
| 1 | 0.480 | 0.480 | 0.163 | 0.163 | 0.172 | 0.172 |
| 2 | 0.612 | 0.607 | 0.314 | 0.310 | 0.248 | 0.244 |
| Participant | Modality | X | Y | Z | |||
|---|---|---|---|---|---|---|---|
| Left | Right | Left | Right | Left | Right | ||
| 1 | Trc file | 0.6811 | 0.0392 | 1.2959 | 1.3508 | 2.0950 | 2.1172 |
| IK result | 0.6762 | 0.0414 | 1.2925 | 1.3567 | 2.0988 | 2.1186 | |
| Δ | 0.0050 | −0.0021 | 0.0034 | −0.0059 | −0.0039 | −0.0013 | |
| 2 | Trc file | 0.1293 | −0.2452 | 1.3071 | 1.3632 | 0.6863 | 0.6980 |
| IK result | 0.1278 | −0.2465 | 1.3058 | 1.3635 | 0.6858 | 0.6978 | |
| Δ | 0.0015 | 0.0013 | 0.0013 | −0.0003 | 0.0005 | 0.0002 | |
| 3 | Trc file | 0.3640 | −0.0474 | 1.2967 | 1.3233 | 0.1912 | 0.1960 |
| IK result | 0.3627 | −0.0411 | 1.2951 | 1.3233 | 0.1924 | 0.1963 | |
| Δ | 0.0013 | −0.0063 | 0.0016 | 0.0000 | −0.0012 | −0.0003 | |
| Participant | Modality | X | Y | Z | |||
|---|---|---|---|---|---|---|---|
| Left | Right | Left | Right | Left | Right | ||
| 1 | Model | 0.69 | 0.69 | 1.32 | 1.37 | −0.33 | 0.27 |
| Actual | 0.62 | 0.62 | 1.34 | 1.34 | −0.28 | 0.08 | |
| Δ | 0.07 | 0.07 | 0.02 | 0.03 | −0.05 | 0.19 | |
| 2 | Model | 0.69 | 0.67 | 1.26 | 1.31 | −0.25 | 0.11 |
| Actual | 0.58 | 0.58 | 1.34 | 1.34 | −0.28 | 0.08 | |
| Δ | 0.11 | 0.09 | −0.08 | −0.03 | 0.03 | 0.03 | |
| 3 | Model | 0.70 | 0.61 | 1.28 | 1.31 | −0.30 | 0.09 |
| Actual | 0.62 | 0.62 | 1.34 | 1.34 | −0.28 | 0.08 | |
| Δ | −0.08 | 0.01 | −0.06 | −0.03 | −0.02 | 0.01 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wechsler, I.; Wolf, A.; Fleischmann, S.; Waibel, J.; Molz, C.; Scherb, D.; Shanbhag, J.; Franz, M.; Wartzack, S.; Miehling, J. Method for Using IMU-Based Experimental Motion Data in BVH Format for Musculoskeletal Simulations via OpenSim. Sensors 2023, 23, 5423. https://doi.org/10.3390/s23125423
Wechsler I, Wolf A, Fleischmann S, Waibel J, Molz C, Scherb D, Shanbhag J, Franz M, Wartzack S, Miehling J. Method for Using IMU-Based Experimental Motion Data in BVH Format for Musculoskeletal Simulations via OpenSim. Sensors. 2023; 23(12):5423. https://doi.org/10.3390/s23125423
Chicago/Turabian StyleWechsler, Iris, Alexander Wolf, Sophie Fleischmann, Julian Waibel, Carla Molz, David Scherb, Julian Shanbhag, Michael Franz, Sandro Wartzack, and Jörg Miehling. 2023. "Method for Using IMU-Based Experimental Motion Data in BVH Format for Musculoskeletal Simulations via OpenSim" Sensors 23, no. 12: 5423. https://doi.org/10.3390/s23125423
APA StyleWechsler, I., Wolf, A., Fleischmann, S., Waibel, J., Molz, C., Scherb, D., Shanbhag, J., Franz, M., Wartzack, S., & Miehling, J. (2023). Method for Using IMU-Based Experimental Motion Data in BVH Format for Musculoskeletal Simulations via OpenSim. Sensors, 23(12), 5423. https://doi.org/10.3390/s23125423