


Wheel Defect Detection Using a Hybrid Deep Learning Approach

Abstract
:1. Introduction
- (a)
- Development of a realistic simulation model of the railway wheelset to generate a comprehensive dataset.
- (b)
- Evaluation of the effectiveness of the proposed method considering a minimalist layout of sensors.
- (c)
- Enhancement of wheel flat detection through the application of hybrid deep learning technique.
2. Methodology
2.1. Development of a Realistic Simulation Model
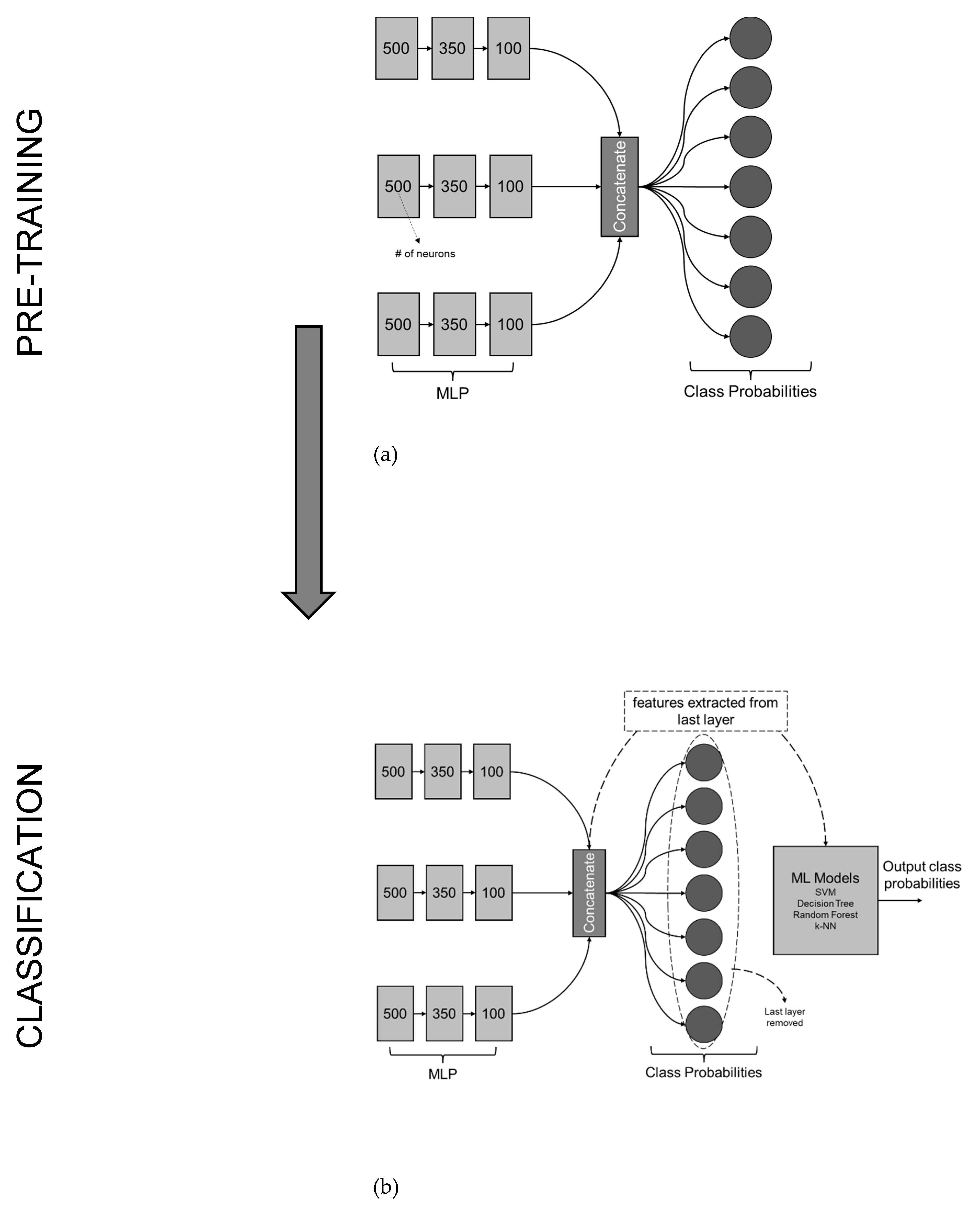
2.2. Hybrid Detection Architecture
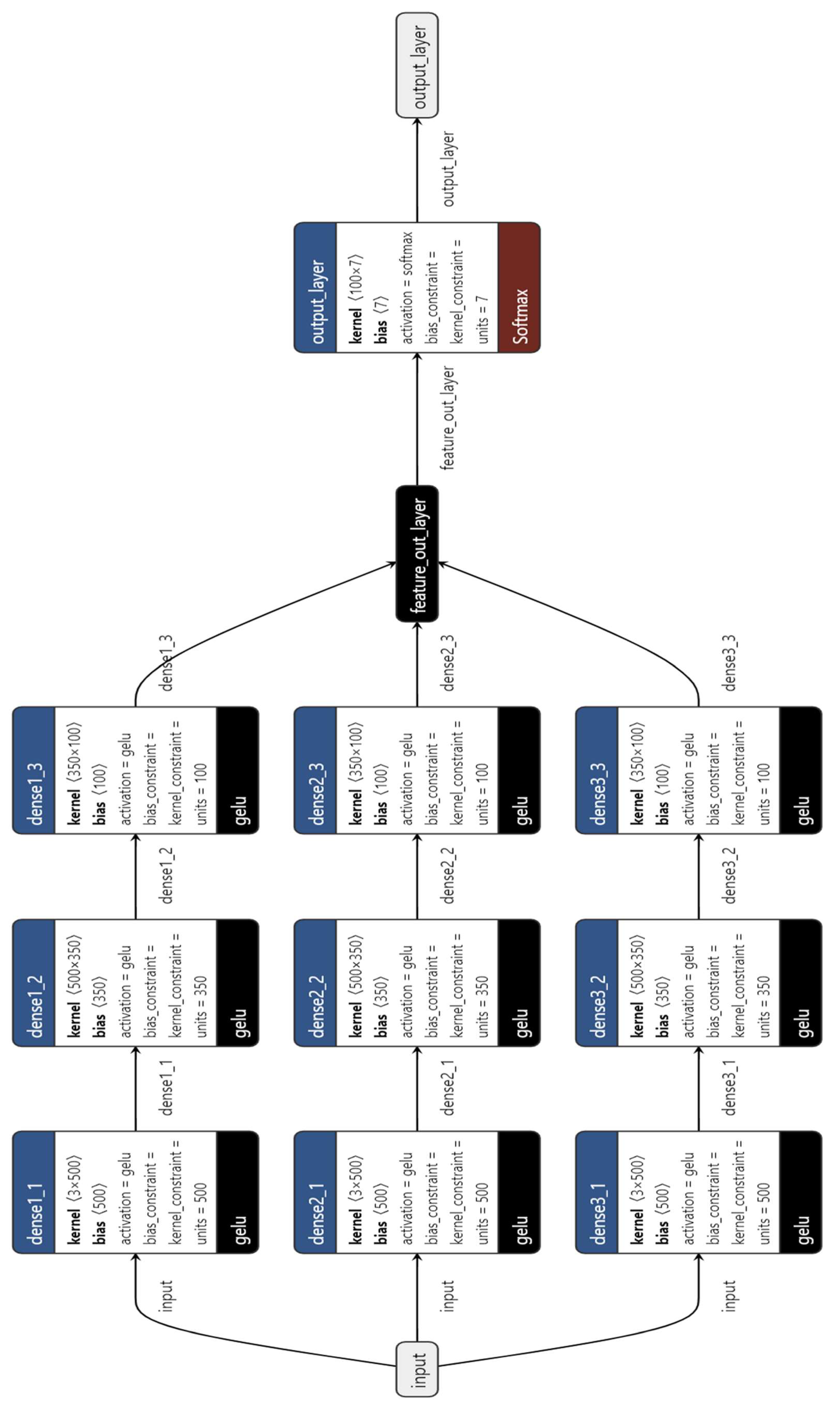
2.3. MLP—Fully Connected Network
2.4. Hyperparameters
2.4.1. GELU Activation Function
2.4.2. Categorical Cross Entropy Loss Function
2.4.3. Adaptive Moment Estimation (ADAM) Optimizer
3. Results
3.1. Training Procedure
3.2. Model Performance
3.3. Results Interpretation
3.4. Classification Results for Conicity Values
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbol | Parameter | Value and/or Unit |
| Creep Force | N | |
| Friction coefficient | ||
| kA | Reduction factor around the adhesion | |
| r0 | Wheel radius | 0.5 m |
| Lg | The half gauge of the track | 0.75 m |
| λw | Wheel conicity | 0.15 rad |
| ε | The gradient of the tangential stress in the adhesion area | |
| VX | Vehicle’s forward velocity | |
| Y | Lateral motion | meter |
| Variation in gauge | meter | |
| yt | Track disturbance in the lateral direction | meter |
| Ψ | Yaw angle | radians |
| kS | Reduction factor in a slip | |
| Iw | Yaw moment of inertia of wheelset | 700 Kgm2 |
| Kw | Yaw stiffness | 5 × 106 N/rad |
| mw | Wheel weight with induction motor | 1250 Kg |
References
- Krummenacher, G.; Ong, C.S.; Koller, S.; Kobayashi, S.; Buhmann, J.M. Wheel Defect Detection with Machine Learning. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1176–1187. [Google Scholar] [CrossRef]
- Alemi, A.; Corman, F.; Lodewijks, G. Condition monitoring approaches for the detection of railway wheel defects. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2017, 231, 961–981. [Google Scholar] [CrossRef]
- Mohammadi, M.; Mosleh, A.; Vale, C.; Ribeiro, D.; Montenegro, P.; Meixedo, A. An Unsupervised Learning Approach for Wayside Train Wheel Flat Detection. Sensors 2023, 23, 1910. [Google Scholar] [CrossRef]
- Shaikh, K.; Kalwer, I.H.; Mal, K.; Chowdhry, B.S. Signal-Based Indirect Wheel Profile Estimation Technique for Solid Axle Railway Wheelset. Mehran Univ. Res. J. Eng. Technol. 2021, 40, 443–449. [Google Scholar] [CrossRef]
- Mosleh, A.; Meixedo, A.; Ribeiro, D.; Montenegro, P.; Calçada, R. Early wheel flat detection: An automatic data-driven wavelet-based approach for railways. Veh. Syst. Dyn. 2023, 61, 1644–1673. [Google Scholar]
- Nielsen, J.C.O.; Johansson, A. Out-of-round railway wheels-a literature survey. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2000, 214, 79–91. [Google Scholar]
- Sun, Q.; Chen, C.; Kemp, A.H.; Brooks, P. An on-board detection framework for polygon wear of railway wheel based on vibration acceleration of axle-box. Mech. Syst. Signal Process. 2021, 153, 107540. [Google Scholar]
- Alexandrou, G.; Kouroussis, G.; Verlinden, O. A comprehensive prediction model for vehicle/track/soil dynamic response due to wheel flats. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 230, 1088–1104. [Google Scholar]
- Mosleh, A.; Costa, P.A.; Calçada, R. A new strategy to estimate static loads for the dynamic weighing in motion of railway vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2019, 234, 183–200. [Google Scholar]
- Bosso, N.; Gugliotta, A.; Zampieri, N. Wheel flat detection algorithm for onboard diagnostic. Measurement 2018, 123, 193–202. [Google Scholar]
- Cavuto, A.; Martarelli, M.; Pandarese, G.; Revel, G.; Tomasini, E. Train wheel diagnostics by laser ultrasonics. Measurement 2016, 80, 99–107. [Google Scholar]
- Amini, A.; Entezami, M.; Huang, Z.; Rowshandel, H.; Papaelias, M. Wayside detection of faults in railway axle bearings using time spectral kurtosis analysis on high-frequency acoustic emission signals. Adv. Mech. Eng. 2016, 8, 1687814016676000. [Google Scholar]
- Chen, B.; Yan, Z.; Chen, W. Defect Detection for Wheel-Bearings with Time-Spectral Kurtosis and Entropy. Entropy 2014, 16, 607–626. [Google Scholar] [CrossRef] [Green Version]
- Papaelias, M.; Amini, A.; Huang, Z.; Vallely, P.; Dias, D.C.; Kerkyras, S. Online condition monitoring of rolling stock wheels and axle bearings. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 230, 709–723. [Google Scholar]
- Xing, Z.; Zhang, Z.; Yao, X.; Qin, Y.; Jia, L. Rail wheel tread defect detection using improved YOLOv3. Measurement 2022, 203, 111959. [Google Scholar]
- Asplund, M. Wayside Condition Monitoring System for Railway Wheel Profiles: Applications and Performance Assessment. Ph.D. Dissertation, Luleå Tekniska Universitet, Luleå, Sweden, 2016. [Google Scholar]
- Kilinc, O.; Vágner, J. Condition Monitoring of Metro Wheelsets Using Wayside Vibration and Acoustic Sensors. Res. Sq. 2022, 1, 1–23. [Google Scholar] [CrossRef]
- Saba, E.; Kalwar, I.H.; Unar, M.A.; Memon, A.L.; Pirzada, N. Fuzzy Logic-Based Identification of Railway Wheelset Conicity Using Multiple Model Approach. Sustainability 2021, 13, 10249. [Google Scholar] [CrossRef]
- Shi, D.; Ye, Y.; Gillwald, M.; Hecht, M. Designing a lightweight 1D convolutional neural network with Bayesian optimization for wheel flat detection using car body accelerations. Int. J. Rail Transp. 2021, 9, 311–341. [Google Scholar] [CrossRef]
- Hussain, I. Multiple Model-Based Real-Time Estimation of Wheel-Rail Contact Conditions. Ph.D. Thesis, University of Salford, Salford, UK, 2012. [Google Scholar]
- Hussain, I.; Mei, T.X.; Ritchings, R.T. Estimation of wheel-rail contact conditions and adhesion using the multiple model approach. Veh. Syst. Dyn. 2013, 51, 32–53. [Google Scholar]
- Hussain, I.; Mei, T.X. Identification of the wheel-rail contact condition for traction and braking control. In Proceedings of the 22nd International Symposium on Dynamics of Vehicles on Roads and Tracks, Manchester, UK, 14–19 August 2011; pp. 14–19. [Google Scholar]
- Saba, E.; Hussain, I.; Ali, M. Model-based indirect conicity estimation technique for solid axle railway wheelset. Mehran Univ. Res. J. Eng. Technol. 2021, 40, 753–760. [Google Scholar]
- Baasch, B.; Heusel, J.; Roth, M.; Neumann, T. Train Wheel Condition Monitoring via Cepstral Analysis of Axle Box Accelerations. Appl. Sci. 2021, 11, 1432. [Google Scholar] [CrossRef]
- Vale, C. Wheel Flats in the Dynamic Behavior of Ballasted and Slab Railway Tracks. Appl. Sci. 2021, 11, 7127. [Google Scholar] [CrossRef]
- Li, C.; Luo, S.; Cole, C.; Spiryagin, M. An overview: Modern techniques for railway vehicle on-board health monitoring systems. Veh. Syst. Dyn. 2017, 55, 1045–1070. [Google Scholar]
- Tsunashima, H. Condition Monitoring of Railway Tracks from Car-Body Vibration Using a Machine Learning Technique. Applied Sciences. Appl. Sci. 2019, 9, 2734. [Google Scholar] [CrossRef] [Green Version]
- Mal, K.; Memon, T.D.; Kalwar, I.H.; Chowdhry, B.S. FPGA implementation of extended Kalman filter for parameters estimation of railway wheelset. Comput. Mater. Contin. 2023, 74, 3351–3370. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Parameters | 4471 |
|---|---|
| Trainable parameters | 4471 |
| Non-trainable parameters | 0 |
| Hyperparameters | |
|---|---|
| Loss function | Categorical cross entropy |
| Activation function | GELU |
| Optimization algorithm | Adam |
| # of training epochs | 100 |
| Batch size | 100 |
| Step | Step Name | Details |
|---|---|---|
| 1 | Data preparation | Prepare and arrange the entire dataset with the number of columns as the number of features and the output label as the last column. The number of rows is the number of datapoints. |
| 2 | Pre-training phase | An MLP network is trained as a classifier first with inputs as feature vectors and output as conicity labels. The model is trained for 50 epochs using the GELU activation function and ADAM optimizer. |
| 3 | Feature extraction | The trained model in Step 2 is then used where the last classification layer is removed, giving us the concatenated layer. The output of this layer is of size 3 × 100. This is a feature matrix from the pre-trained MLP network. |
| 4 | ML model training | Multiple ML models, such as SVM, DT, RF, and kNN, are then trained on the extracted feature matrix from Step 3. |
| Model | Performance Metrics | |||
|---|---|---|---|---|
| Accuracy | Precision | Recall | F1 Score | |
| MLP | 88.6% | 89.6% | 88.6% | 88.7% |
| MLP-RF | 99.0% | 99.2% | 99.2% | 99.1% |
| MLP-DT | 98.9% | 98.9% | 98.0% | 98.9% |
| MLP-KNN | 95.0% | 94.5% | 94.5% | 94.0% |
| MLP-SVM | 83.1% | 85.6% | 83.1% | 83.5% |
| Model | Results Interpretation |
|---|---|
| MLP | This model achieved an accuracy of 88.6%, which means it correctly classified 88.6% of the defects. The precision of 89.6% indicates that when it predicted a defect, it was correct 89.6% of the time. The recall of 88.6% indicates that it identified 88.6% of the actual defects. The F1 score, which considers both precision and recall, is 88.7%. |
| MLP-RF | This model achieved high accuracy of 99.0%, indicating that it performed exceptionally well in classifying defects. The precision and recall of 99.2% suggest it had a very low rate of false positives and false negatives. The F1 score of 99.1% reflects the overall effectiveness of the model in detecting defects. |
| MLP-DT | This model achieved an accuracy of 98.9%, indicating strong performance in defect detection. The precision of 98.9% suggests that it had a very low rate of false positives. However, the recall of 98.0% indicates it missed a small portion of actual defects. The F1 score of 98.9% reflects a good balance between precision and recall. |
| MLP-kNN | This model achieved an accuracy of 95.0%, indicating a relatively high performance in detecting defects. The precision and recall of 94.5% suggest a low rate of false positives and false negatives. The F1 score of 94.0% reflects a good overall performance, though slightly lower than the previous models. |
| MLP-SVM | This model achieved an accuracy of 83.1%, which indicates it had a moderate level of performance in detecting defects. The precision of 85.6% suggests it had a relatively low rate of false positives. However, the recall of 83.1% indicates it missed a significant portion of actual defects. The F1 score of 83.5% reflects the overall effectiveness of the model, considering both precision and recall. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shaikh, K.; Hussain, I.; Chowdhry, B.S. Wheel Defect Detection Using a Hybrid Deep Learning Approach. Sensors 2023, 23, 6248. https://doi.org/10.3390/s23146248
Shaikh K, Hussain I, Chowdhry BS. Wheel Defect Detection Using a Hybrid Deep Learning Approach. Sensors. 2023; 23(14):6248. https://doi.org/10.3390/s23146248
Chicago/Turabian StyleShaikh, Khurram, Imtiaz Hussain, and Bhawani Shankar Chowdhry. 2023. "Wheel Defect Detection Using a Hybrid Deep Learning Approach" Sensors 23, no. 14: 6248. https://doi.org/10.3390/s23146248
APA StyleShaikh, K., Hussain, I., & Chowdhry, B. S. (2023). Wheel Defect Detection Using a Hybrid Deep Learning Approach. Sensors, 23(14), 6248. https://doi.org/10.3390/s23146248