
Integer Arithmetic Algorithm for Fundamental Frequency Identification of Oceanic Currents



Abstract
:1. Introduction
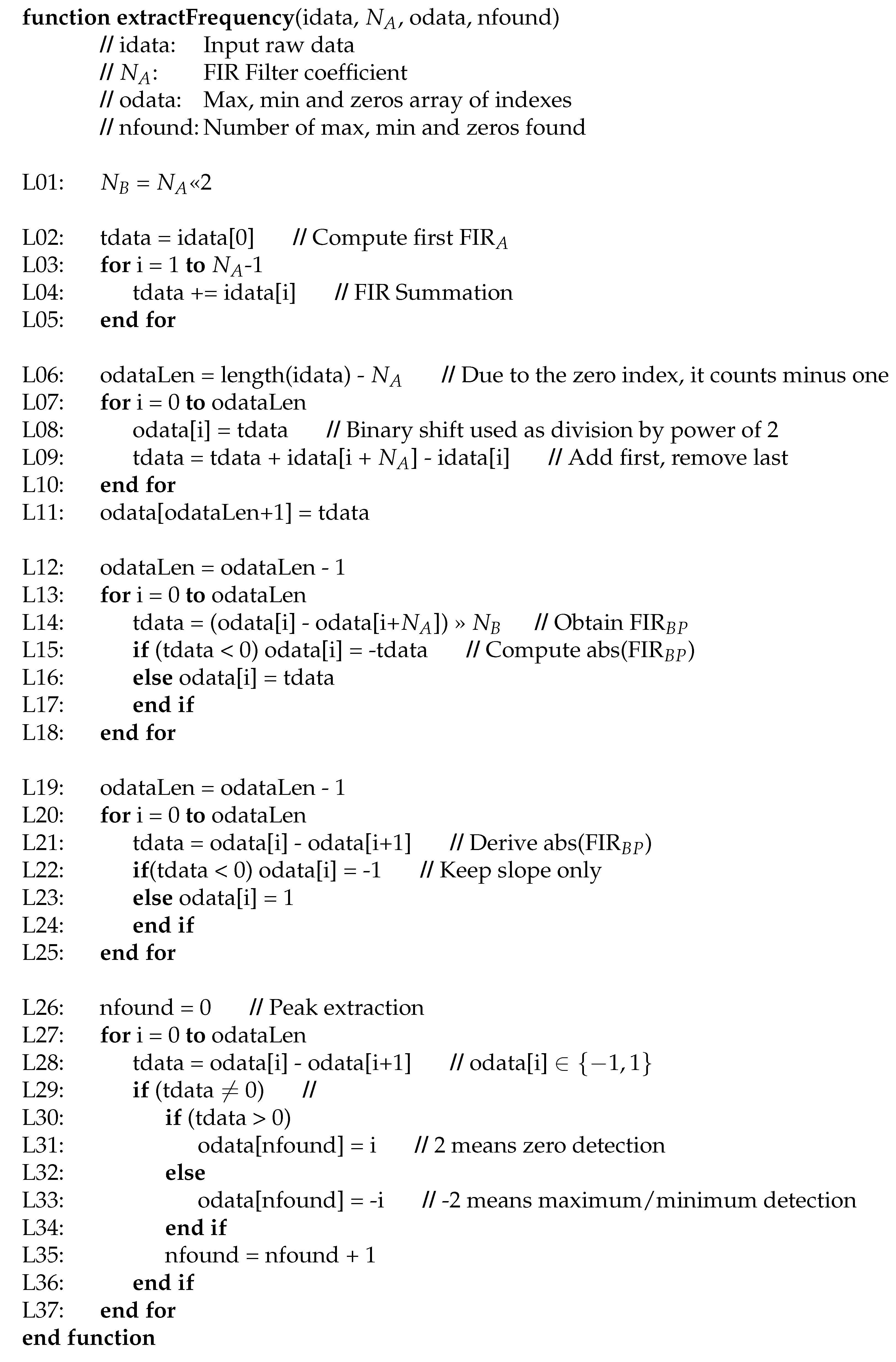
- An integer arithmetic algorithm for the identification of fundamental frequencies oriented towards edge computing is proposed.
- The implementation of complex mathematical functions such as FIR filtering or derivation using only integer variables, additions and shift operations is studied in detail.
- The random nature of the traveling wave is evaluated based on the length of the acquired raw data.
2. Related Works
3. Background
3.1. Ocean Currents
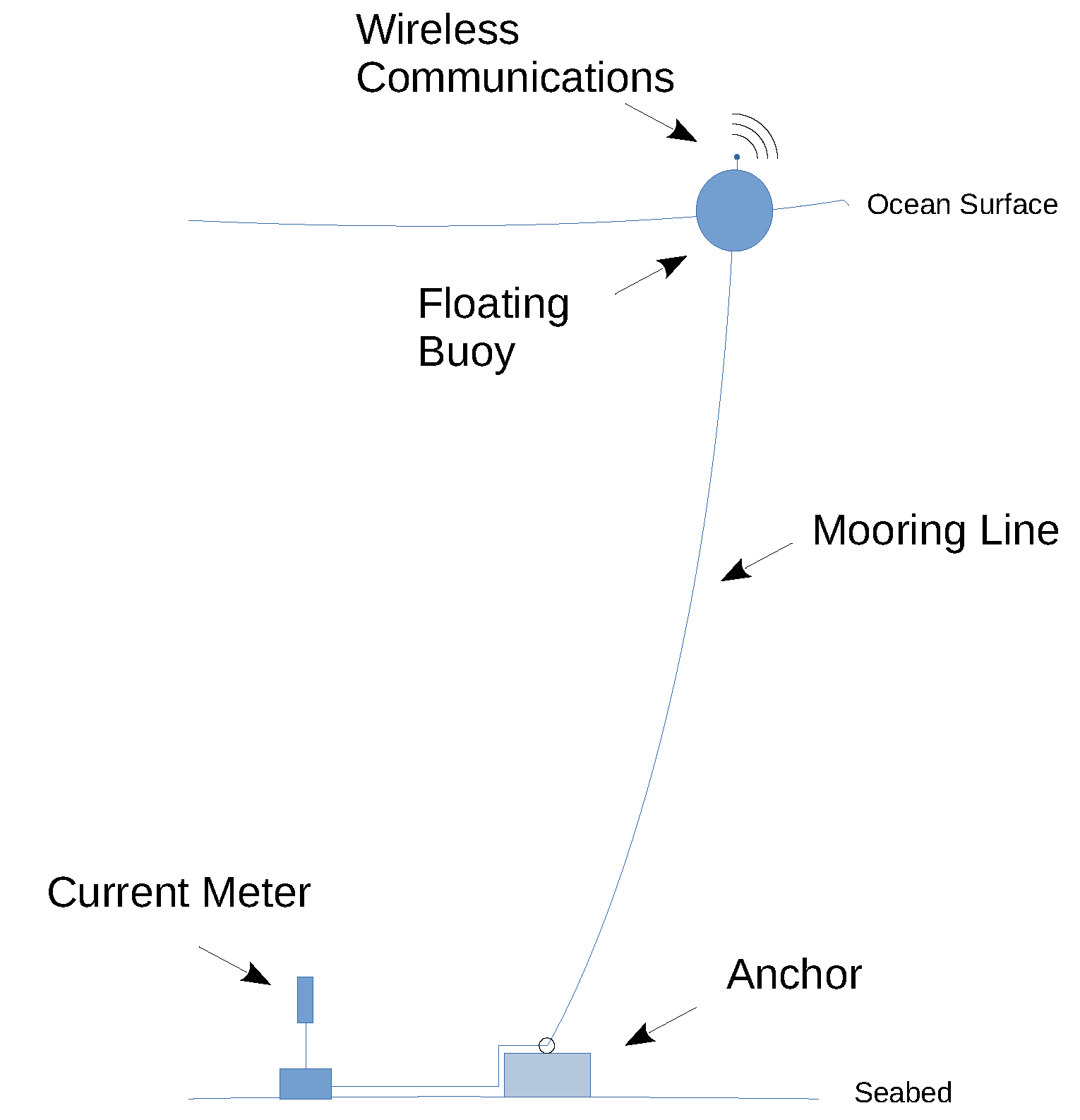
3.2. Ocean Current Meters
3.3. Onboard Instrument Capabilities
4. Method
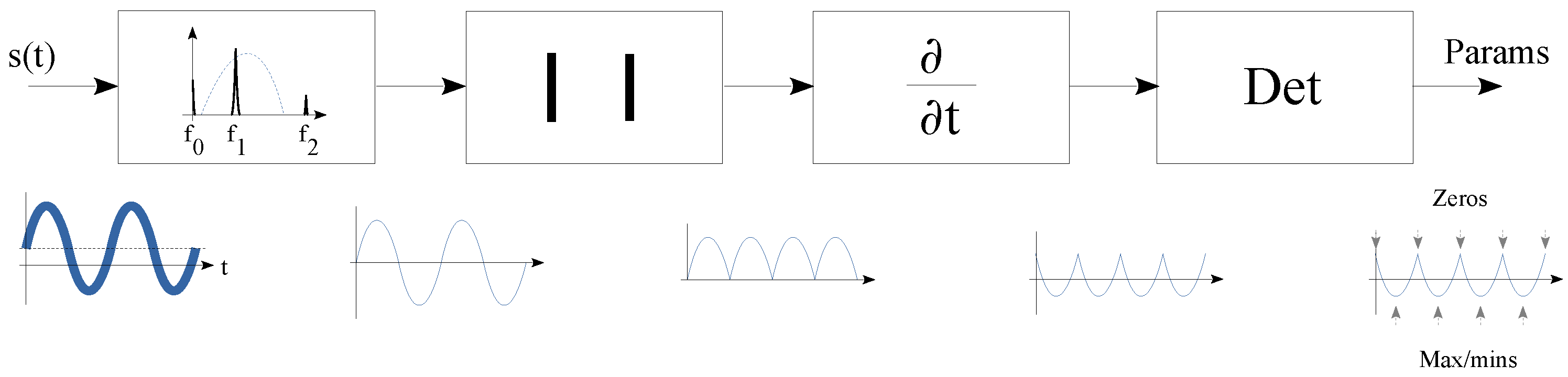
4.1. Parameters Extraction
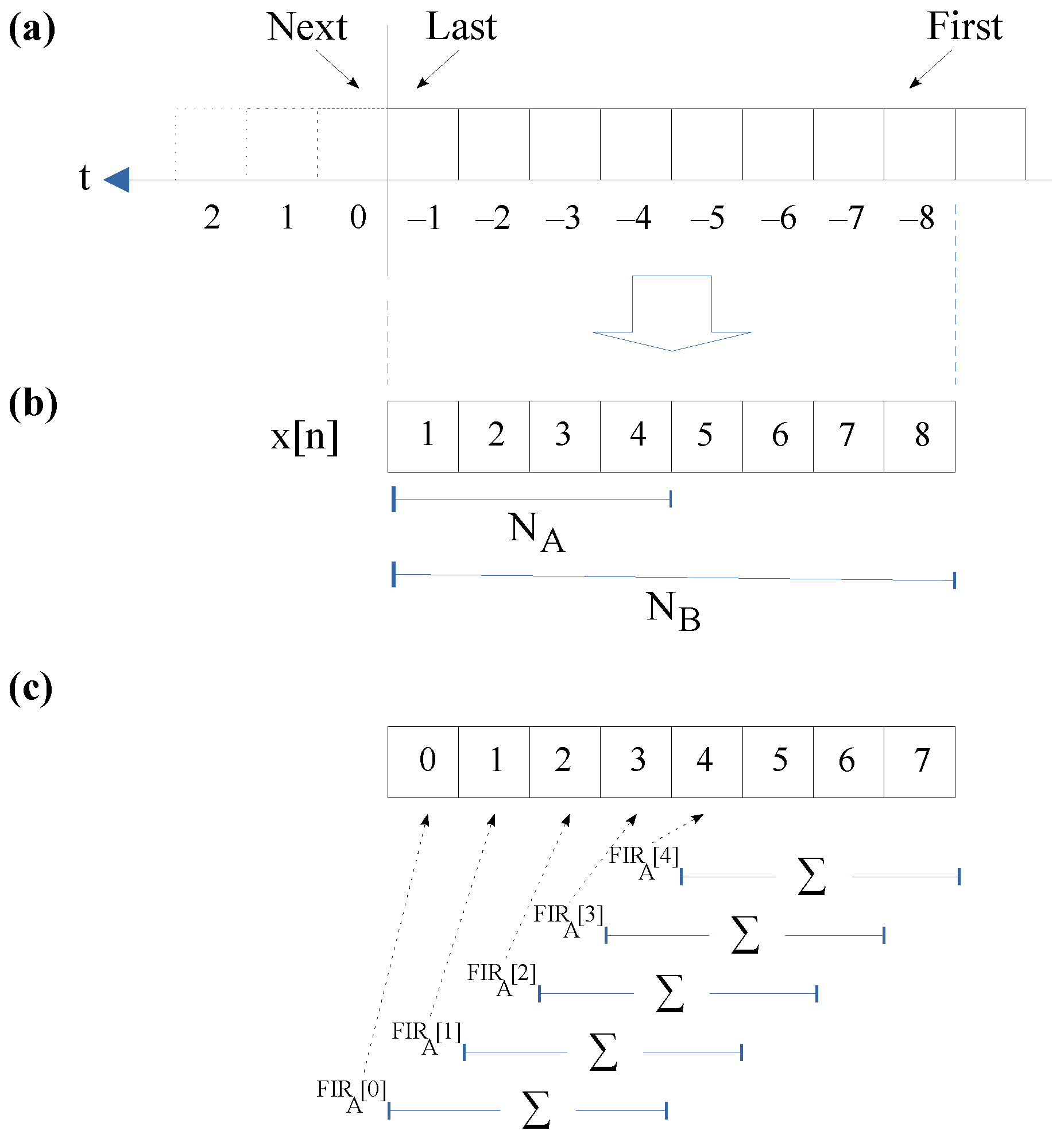
4.2. Proposed Algorithm
4.3. Practical Implementation
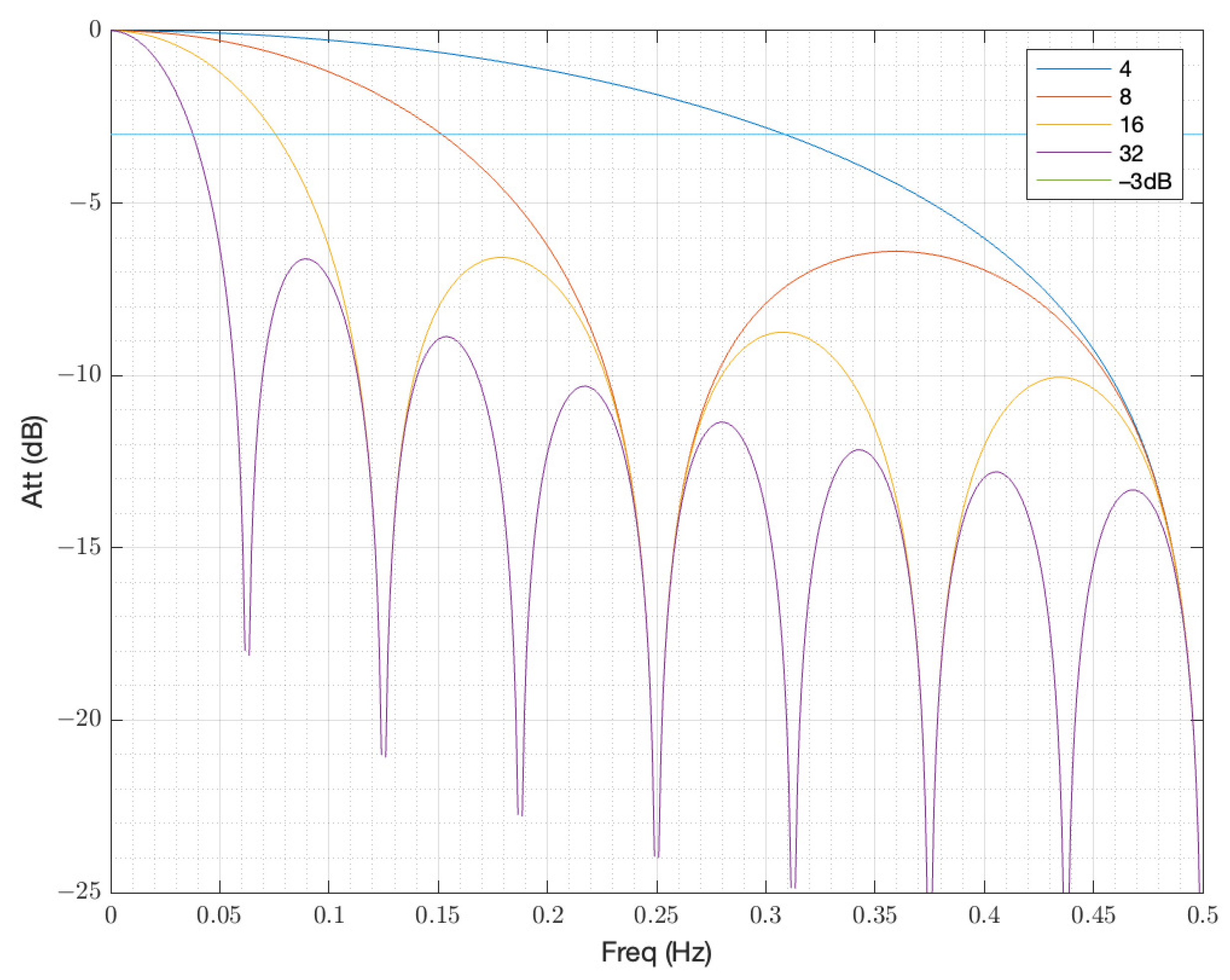
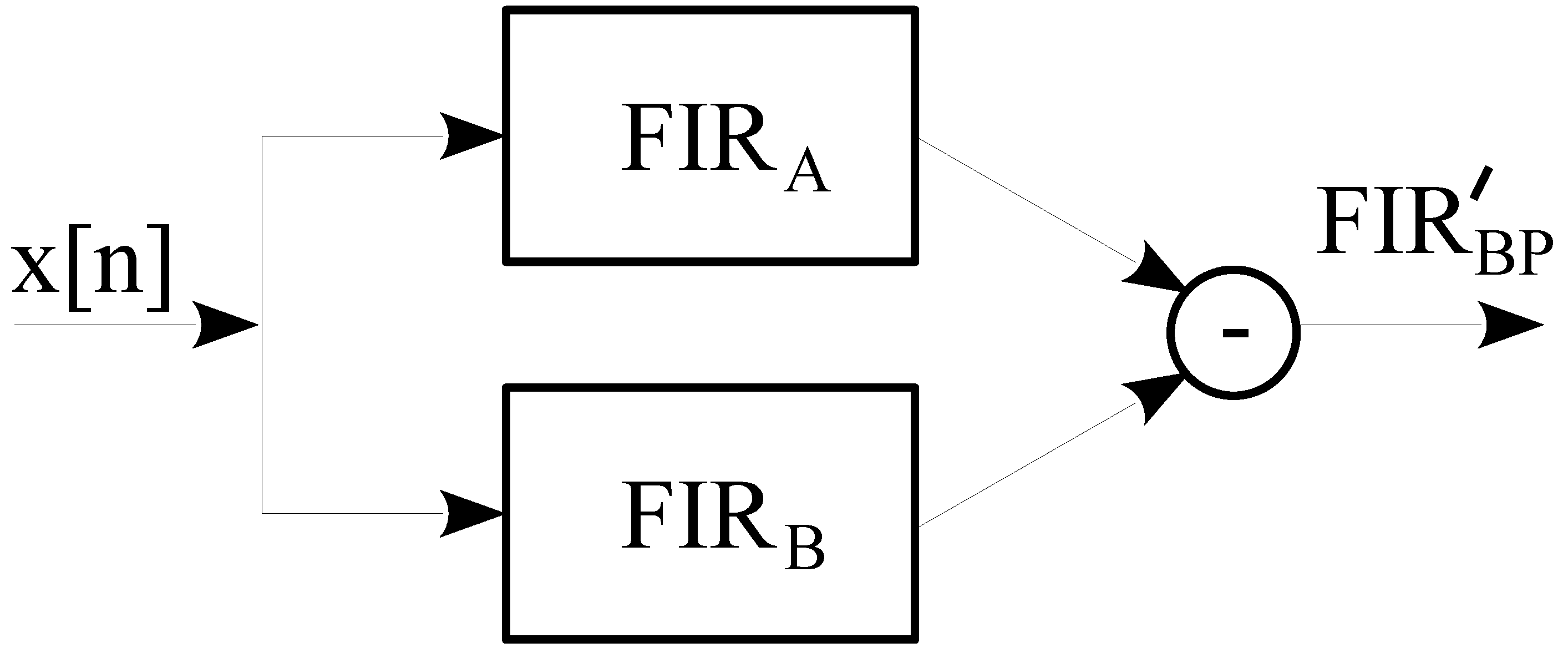
4.3.1. FIR Filter
4.3.2. Algorithm Implementation
5. Experiments and Discussion
5.1. Shallow Waters
5.1.1. Setup
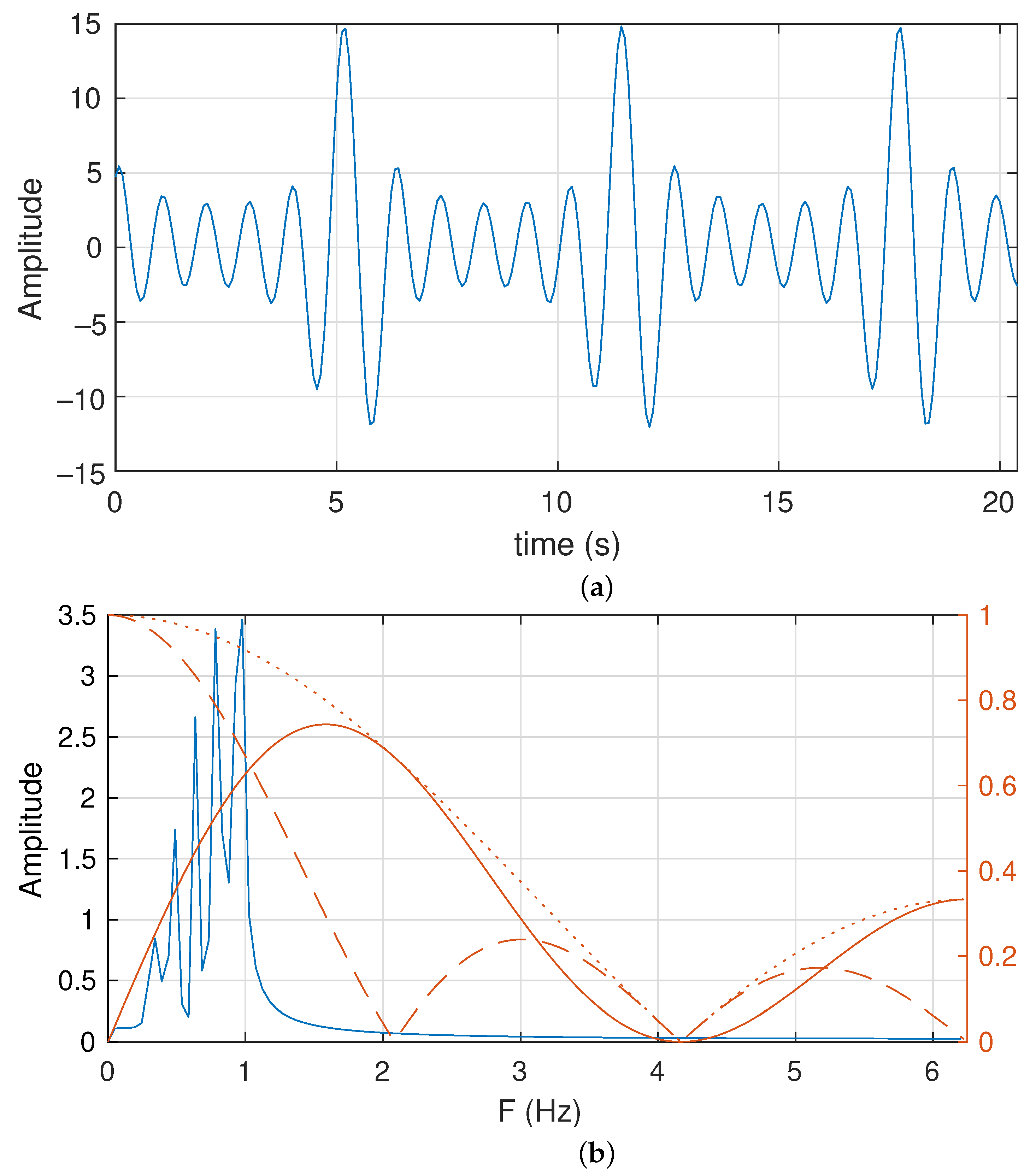
5.1.2. Evaluation
5.2. Deep Waters
5.2.1. Setup
5.2.2. Evaluation
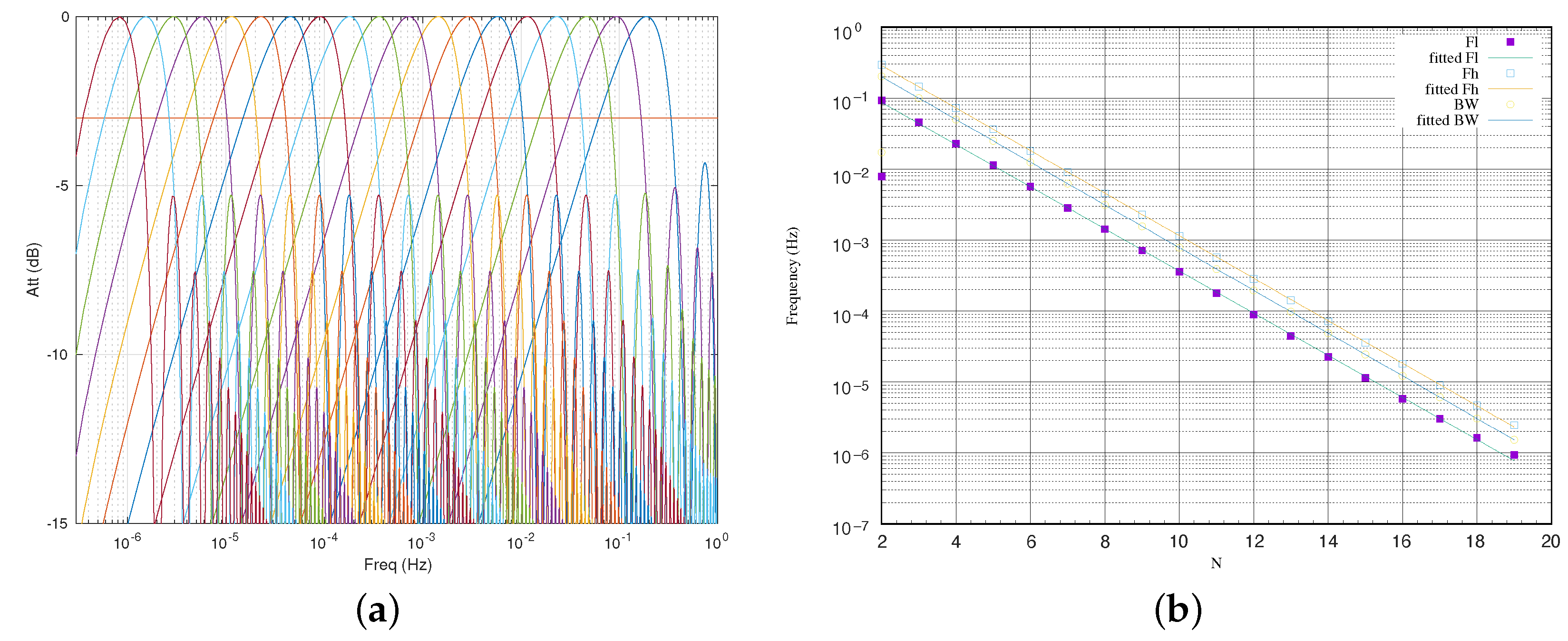
5.2.3. Frequency Evolution
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Boas, A.B.V.; Ardhuin, F.; Ayet, A.; Bourassa, M.A.; Brandt, P.; Chapron, B.; Cornuelle, B.D.; Farrar, J.T.; Fewings, M.R.; Fox-Kemper, B.; et al. Integrated Observations of Global Surface Winds, Currents, and Waves: Requirements and Challenges for the Next Decade. Front. Mar. Sci. 2019, 6, 425. [Google Scholar] [CrossRef]
- Klebert, P.; Patursson, Ø.; Endresen, P.C.; Rundtop, P.; Birkevold, J.; Rasmussen, H.W. Three-dimensional deformation of a large circular flexible sea cage in high currents: Field experiment and modeling. Ocean Eng. 2015, 104, 511–520. [Google Scholar] [CrossRef]
- Dong, S.; Park, S.; Kitazawa, D.; Zhou, J.; Yoshida, T.; Li, Q. Model tests and full-scale sea trials for drag force and deformation of a marine aquaculture net cage. Ocean Eng. 2021, 240, 109941. [Google Scholar] [CrossRef]
- Wang, Y.; Man, K.L.; Lee, K.; Hughes, D.; Guan, S.-U.; Wong, P. Application of Wireless Sensor Network Based on Hierarchical Edge Computing Structure in Rapid Response System. Electronics 2020, 9, 1176. [Google Scholar] [CrossRef]
- Chen, H.; Yu, Z.; Xu, J.; Jiang, L.; Lu, Z.; Fu, Y.; Li, L. Huicore: A Generalized Hardware Accelerator for Complicated Functions. IEEE Trans. Circ. Syst. I Reg. Pap. 2022, 69, 2463–2476. [Google Scholar] [CrossRef]
- Romaine, J.B.; Ashley, T.I.; Martín, M.P. Digital Fixed-Point Low Powered Area Efficient Function Estimation for Implantable Devices. IEEE Access 2022, 10, 70793–70805. [Google Scholar] [CrossRef]
- Sosa, J.; Montiel-Nelson, J.-A. Novel Deep-Water Tidal Meter for Offshore Aquaculture Infrastructures. Sensors 2022, 22, 5513. [Google Scholar] [CrossRef]
- Sun, J.; Aboutanios, E.; Smith, D.B. Low Cost and Precise Frequency Estimation in Unbalanced Three Phase Power Systems. IEEE Trans. Power Deliv. 2023, 38, 767–776. [Google Scholar] [CrossRef]
- Terriche, Y.; Laib, A.; Lashab, A.; Su, C.-L.; Guerrero, J.M.; Vasquez, J.C. A Frequency Independent Technique to Estimate Harmonics and Interharmonics in Shipboard Microgrids. IEEE Trans. Smart Grid 2022, 13, 888–899. [Google Scholar] [CrossRef]
- Karimi-Ghartemani, M.; Iravani, M.R. Robust and Frequency-Adaptive Measurement of Peak Value. IEEE Trans. Power Deliv. 2004, 19, 481–489. [Google Scholar] [CrossRef]
- Marques, C.A.G.; Ribeiro, M.V.; Duque, C.A.; Ribeiro, P.F.; Da Silva, E.A.B. A Controlled Filtering Method for Estimating Harmonics of Off-Nominal Frequencies. IEEE Trans. Smart Grid 2012, 3, 38–49. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME—J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Jwo, D.-J.; Biswal, A. Implementation and Performance Analysis of Kalman Filters with Consistency Validation. Mathematics 2023, 11, 521. [Google Scholar] [CrossRef]
- Sadinezhad, I.; Agelidis, V.G. Frequency Adaptive Least-Squares-Kalman Technique for Real-Time Voltage Envelope and Flicker Estimation. IEEE Trans. Ind. Electron. 2012, 59, 3330–3341. [Google Scholar] [CrossRef]
- Zhang, X.-M. Parameter Estimation of Shallow Wave Equation via cuckoo Search. Neural Comput. Appl. 2017, 28, 4047–4059. [Google Scholar] [CrossRef]
- Jiang, C.; Serrao, P.; Liu, M.; Cho, C. An Enhanced Genetic Algorithm for Parameter Estimation of Sinusoidal Signals. Appl. Sci. 2020, 10, 5110. [Google Scholar] [CrossRef]
- Santana Sosa, G.; Santana Abril, J.; Sosa, J.; Montiel-Nelson, J.-A.; Bautista, T. Design of a Practical Underwater Sensor Network for Offshore Fish Farm Cages. Sensors 2020, 20, 4459. [Google Scholar] [CrossRef]
- Chen, Y.-H.; Yang, R.-Y. Study on Array Floating Platform for Wind Energy and Marine Space Optimization. Sustainability 2021, 13, 14014. [Google Scholar] [CrossRef]
- Young, I.R. Regular, Irregular Waves and the Wave Spectrum. In Encyclopedia of Maritime and Offshore Engineering; John Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2017; ISBN 978-1-118-47635-2. [Google Scholar]
- Pedlosky, J. Ocean Circulation Theory; Springer: Berlin/Heidelberg, Germany, 1996; ISBN 978-3-642-08224-5. [Google Scholar]
- Aquadopp 300 m: Highly Versatile Single-Point Current Meter. Technical Specification Guide, Nortek. 2022. Available online: https://www.nortekgroup.com/products/aquadopp-300m/pdf (accessed on 30 June 2023).
- Vector 300 m: High Accuracy and Single-Point Current Meter. Technical Specification Guide, Nortek. 2022. Available online: https://www.nortekgroup.com/es/products/vector-300-m/pdf (accessed on 30 June 2023).
- RCM Blue. Technical Specification Guide. Aanderaa. 2020. Available online: https://www.aanderaa.com/media/pdfs/d430_dcs_blue_5430_print_en.pdf (accessed on 1 July 2023).
- Catsamas, S.; Shi, B.; Deletic, B.; Wang, M.; McCarthy, D.T. A Low-Cost, Low-Power Water Velocity Sensor Utilizing Acoustic Doppler Measurement. Sensors 2022, 22, 7451. [Google Scholar] [CrossRef]
- Lu, H.-Y.; Cheng, C.-Y.; Cheng, S.-C.; Cheng, Y.-H.; Lo, W.-C.; Jiang, W.-L.; Nan, F.-H.; Chang, S.-H.; Ubina, N.A. A Low-Cost AI Buoy System for Monitoring Water Quality at Offshore Aquaculture Cages. Sensors 2022, 22, 4078. [Google Scholar] [CrossRef]
- Kjelldorff, M.; Kuttenkeuler, J.; Kirchner, N.; Krützfeldt, J.; Sundberg, M. Water current measurements using oceanographic bottom lander LoTUS. Appl. Ocean Res. 2020, 94, 101982. [Google Scholar] [CrossRef]
- Marchant, R.; Stevens, T.; Choukroun, T.; Coombes, G.; Santarossa, M.; Whinney, J.; Ridd, P. A Buoyant Tethered Sphere for Marine Current Estimation. IEEE J. Ocean Eng. 2014, 39, 2–9. [Google Scholar] [CrossRef]
- TCM-1 Current Meter. Universal User Guide. Lowell Instruments LLC, 2022. Available online: https://lowellinstruments.com/products/tcm-1-tilt-current-meter/ (accessed on 20 May 2022).
- Beddows, P.A.; Mallon, E.K. Cave Pearl Data Logger: A Flexible Arduino-Based Logging Platform for Long-Term Monitoring in Harsh Environments. Sensors 2018, 18, 530. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kinetis KL17 Microcontroller Data Sheet, NXP. 2016. Available online: https://www.nxp.com/docs/en/data-sheet/KL17P64M48SF6.pdf (accessed on 20 June 2023).
- Kinetis K22F Microcontroller Data Sheet, NXP. 2016. Available online: https://www.nxp.com/docs/en/data-sheet/K22P121M120SF8.pdf (accessed on 20 June 2023).
- Kang, H.; Wu, Y.; Chen, L.; Zhang, X. Research on Device Modeling Technique Based on MLP Neural Network for Model Parameter Extraction. Appl. Sci. 2022, 12, 1357. [Google Scholar] [CrossRef]
- ARM Cortex-M0+. Available online: https://developer.arm.com/ip-products/processors/cortex-m/cortex-m0-plus (accessed on 9 March 2021).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Functions | Language | Domain | Equipment |
|---|---|---|---|---|---|
| [8] | 2023 | FFT, IFFT, sin, sqrt | Matlab | Desktop PC | |
| [9] | 2022 | FFT | Matlab | Desktop PC | |
| [10] | 2004 | EPPL, sin, integrator | Matlab | Desktop PC/*DSP | |
| [11] | 2012 | FIR, sin, sqrt | - | Desktop PC | |
| [13] | 2023 | Kal, sqrt, covariance | Matlab | Desktop PC | |
| [15] | 2017 | Heuristic | C | Desktop PC | |
| [16] | 2020 | Heuristic | - | Desktop PC |
| Reference | Method | Location | Year | Cost | CPU | Data |
|---|---|---|---|---|---|---|
| [21] | Doppler | Seabed | 2023 | $10–20 k | NA | RAW + PC |
| [22] | Doppler | Seabed | 2023 | $10–20 k | NA | RAW + PC |
| [23] | Doppler | Seabed | 2023 | $8–15 k | NA | RAW + PC |
| [24] | Doppler | Seabed | 2022 | $50 1 | Arduino | RAW + PC |
| [25] | Tilt | Buoy | 2022 | $2 k | Arduino | RAW + PC |
| [26] | Tilt | Seabed | 2020 | NA | Logger | RAW + PC |
| [27] | Tilt | Buoy | 2014 | $100 | Logger | RAW + PC |
| [28] | Tilt | Seabed | 2015 | $1.1–1.5 k | NA | RAW + PC |
| [29] | Tilt | Mooring | 2018 | $50 | Arduino | RAW + PC |
| [7] | Tilt | Mooring | 2022 | $50 | MKL17Z256 | RAW + PC |
| (Hz) | (Hz) | |
|---|---|---|
| 2 | 6.13925 × | 3.35325 × |
| 3 | 3.03691 × | 1.66480 × |
| 4 | 1.51446 × | 8.30954 × |
| 5 | 7.56748 × | 4.15297 × |
| 6 | 3.78324 × | 2.07627 × |
| 7 | 1.89166 × | 1.03812 × |
| 8 | 9.45940 × | 5.19069 × |
| 9 | 4.73088 × | 2.59546 × |
| 10 | 2.36663 × | 1.29784 × |
| 11 | 1.18450 × | 6.49043 × |
| 12 | 5.93446 × | 3.24641 × |
| 13 | 2.97915 × | 1.62439 × |
| 14 | 1.50149 × | 8.13390 × |
| 15 | 7.62670 × | 4.07887 × |
| 16 | 3.93267 × | 2.05143 × |
| 17 | 2.08611 × | 1.03765 × |
| 18 | 1.16280 × | 5.30776 × |
| 19 | 7.01058 × | 2.77330 × |
| Size | Max * | Avg * | Std * | Zeros | Peaks and Valleys |
|---|---|---|---|---|---|
| 128 | 3.95 | 0.75 | 0.93 | 28 | 29 |
| 256 | 4.00 | 0.81 | 0.95 | 55 | 56 |
| 512 | 4.56 | 0.73 | 0.94 | 112 | 113 |
| 1024 | 5.94 | 0.93 | 1.14 | 230 | 231 |
| 2048 | 24.29 | 1.7 | 2.91 | 471 | 471 |
| 4096 | 24.29 | 2.02 | 3.12 | 918 | 919 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montiel-Caminos, J.; Hernandez-Gonzalez, N.G.; Sosa, J.; Montiel-Nelson, J.A. Integer Arithmetic Algorithm for Fundamental Frequency Identification of Oceanic Currents. Sensors 2023, 23, 6549. https://doi.org/10.3390/s23146549
Montiel-Caminos J, Hernandez-Gonzalez NG, Sosa J, Montiel-Nelson JA. Integer Arithmetic Algorithm for Fundamental Frequency Identification of Oceanic Currents. Sensors. 2023; 23(14):6549. https://doi.org/10.3390/s23146549
Chicago/Turabian StyleMontiel-Caminos, Juan, Nieves G. Hernandez-Gonzalez, Javier Sosa, and Juan A. Montiel-Nelson. 2023. "Integer Arithmetic Algorithm for Fundamental Frequency Identification of Oceanic Currents" Sensors 23, no. 14: 6549. https://doi.org/10.3390/s23146549
APA StyleMontiel-Caminos, J., Hernandez-Gonzalez, N. G., Sosa, J., & Montiel-Nelson, J. A. (2023). Integer Arithmetic Algorithm for Fundamental Frequency Identification of Oceanic Currents. Sensors, 23(14), 6549. https://doi.org/10.3390/s23146549