
EarGait: Estimation of Temporal Gait Parameters from Hearing Aid Integrated Inertial Sensors

 , , , , and
, , , , and 
Abstract
:1. Introduction
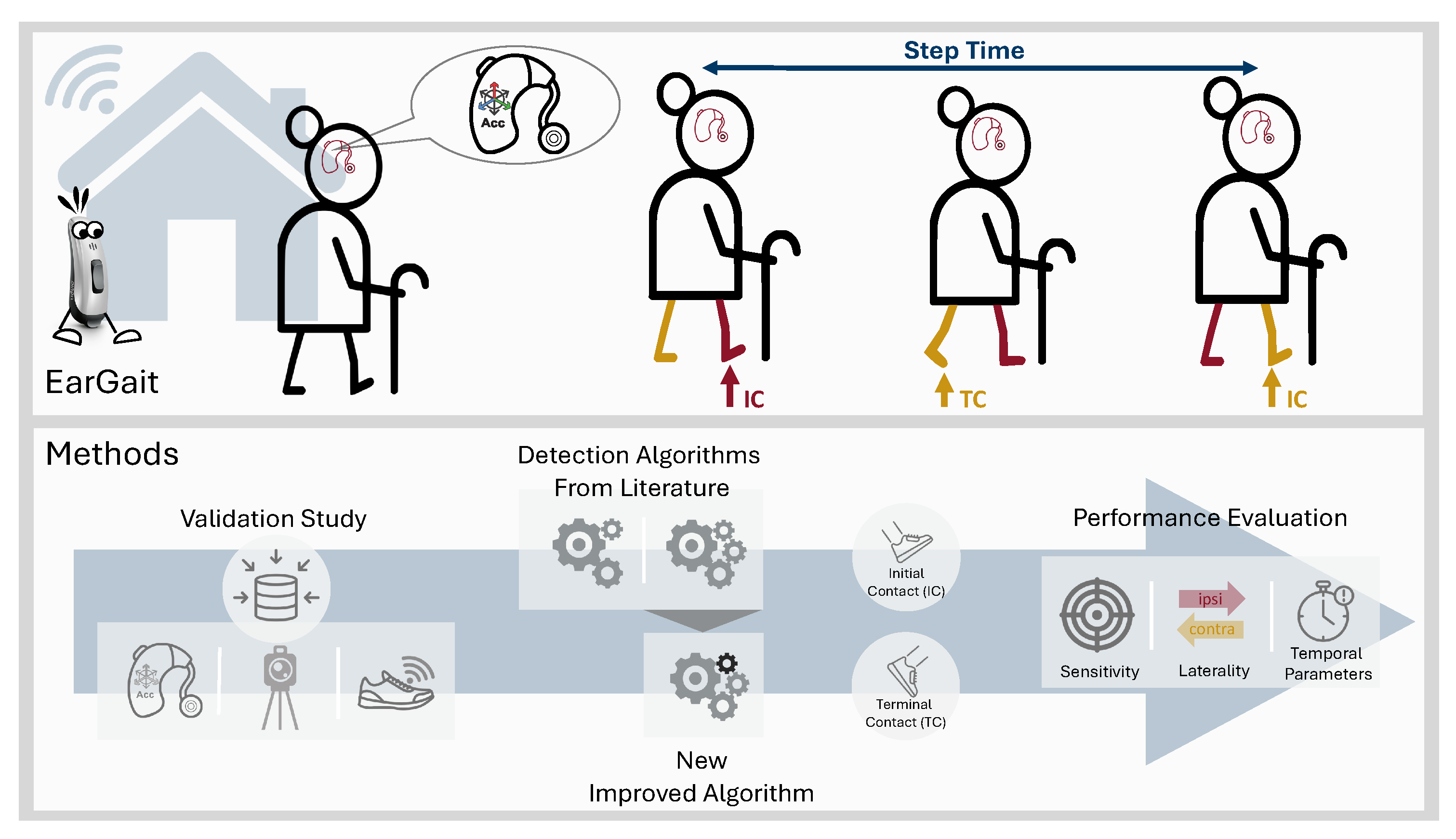
- As the first step in a comprehensive gait analysis pipeline for ear-worn sensors, we present a comparative validation for different gait event detection methods [26,27] using an optical motion capture system as a reference. Algorithms were evaluated in terms of detection rate, laterality determination, and temporal parameters.
- To enhance the accuracy of the laterality determination of gait events, we propose an improved version of the algorithm by Diao et al. [27].
- The calculated temporal gait parameters are compared with respect to different walking speeds, study cohorts, and sampling frequencies.
- We published an open-source Python package called EarGait providing functions for gait analysis using ear-worn sensors, including data loading functionalities, event detection algorithms, and temporal parameter estimation [30].
2. Materials and Methods
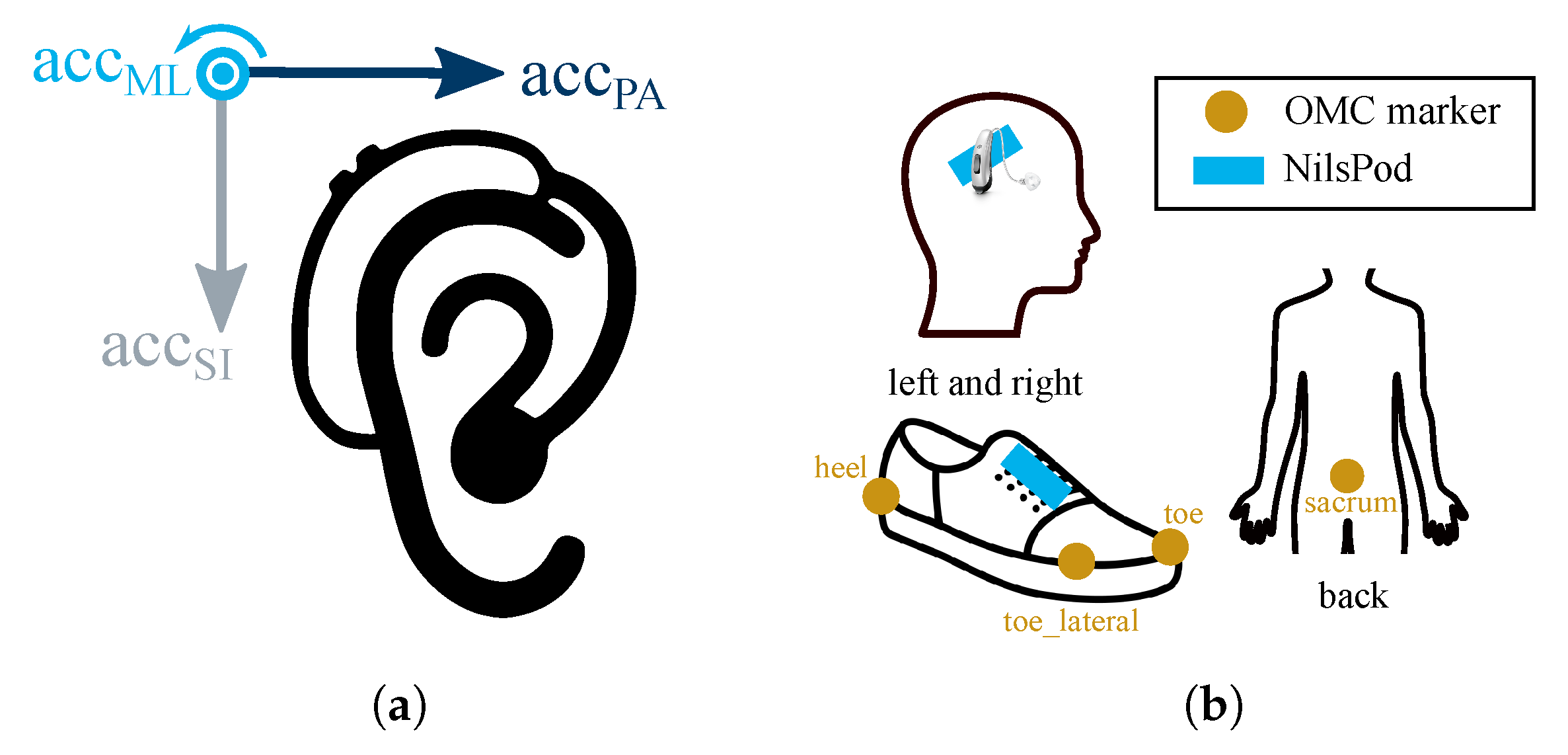
2.1. Data Collection
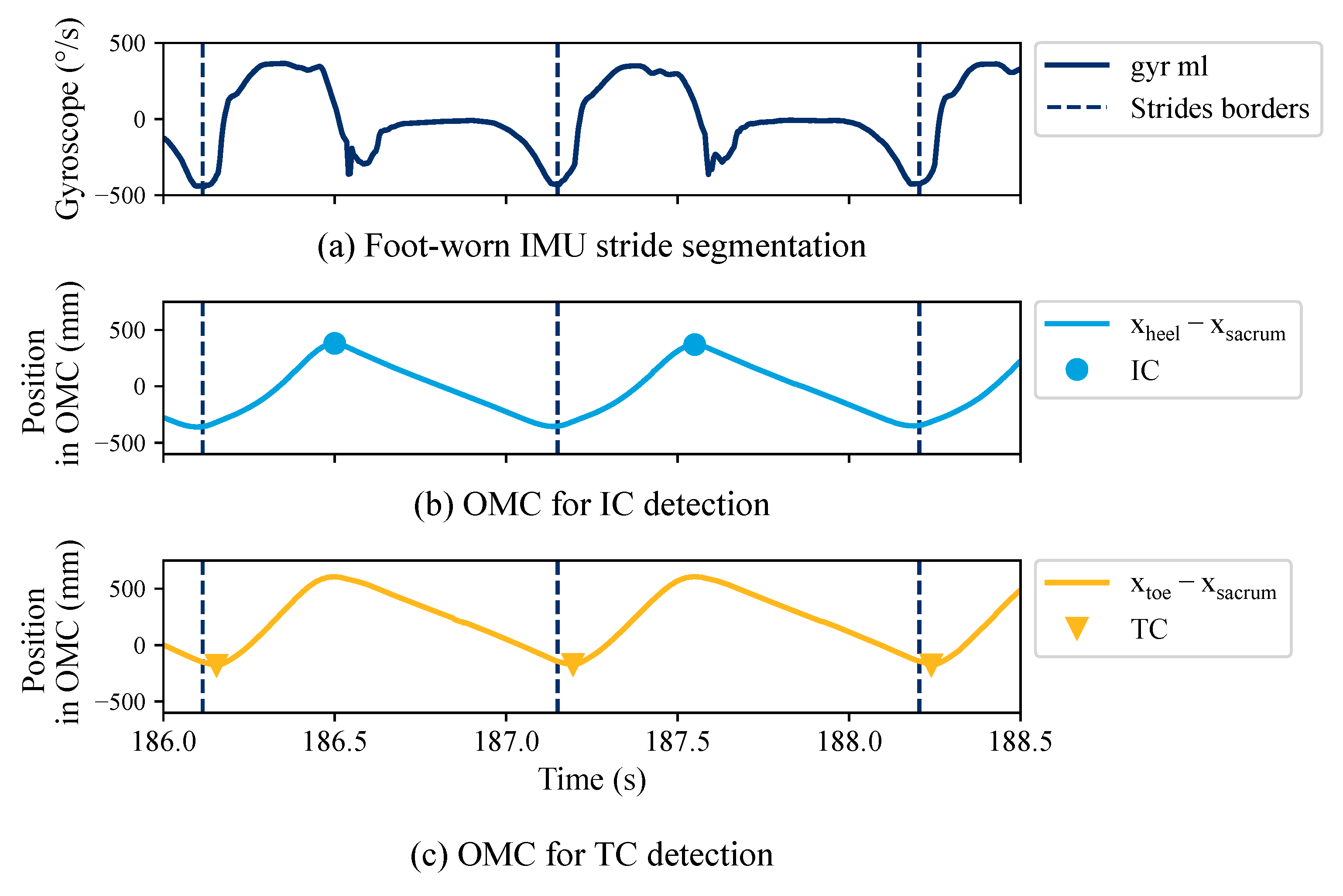
2.2. Reference Gait Parameters
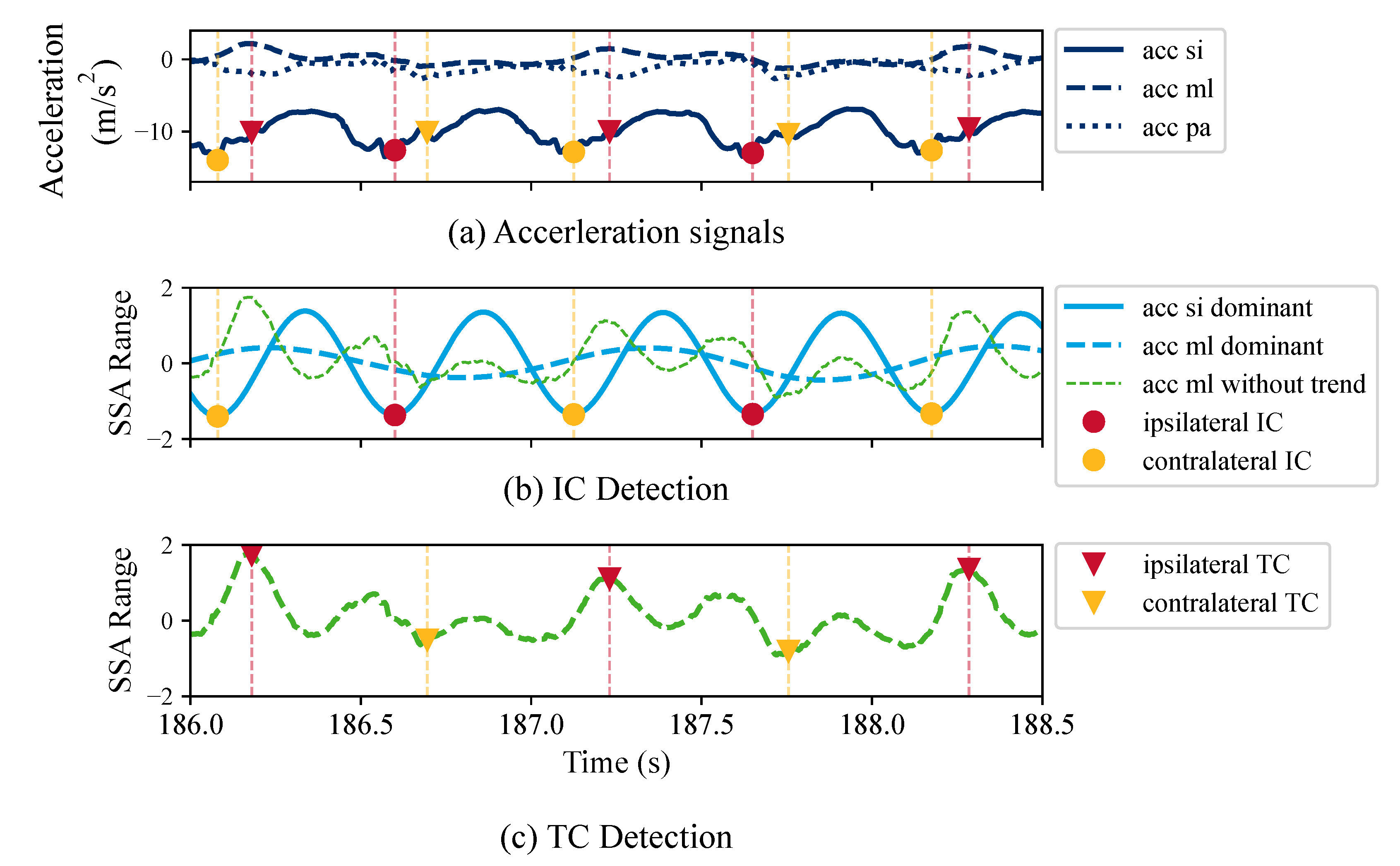
2.3. Gait Event Detection (GED)
2.4. Evaluation
2.4.1. Sensitivity and Laterality Determination
2.4.2. Temporal Parameters
3. Results
3.1. Sensitivity and Laterality Determination
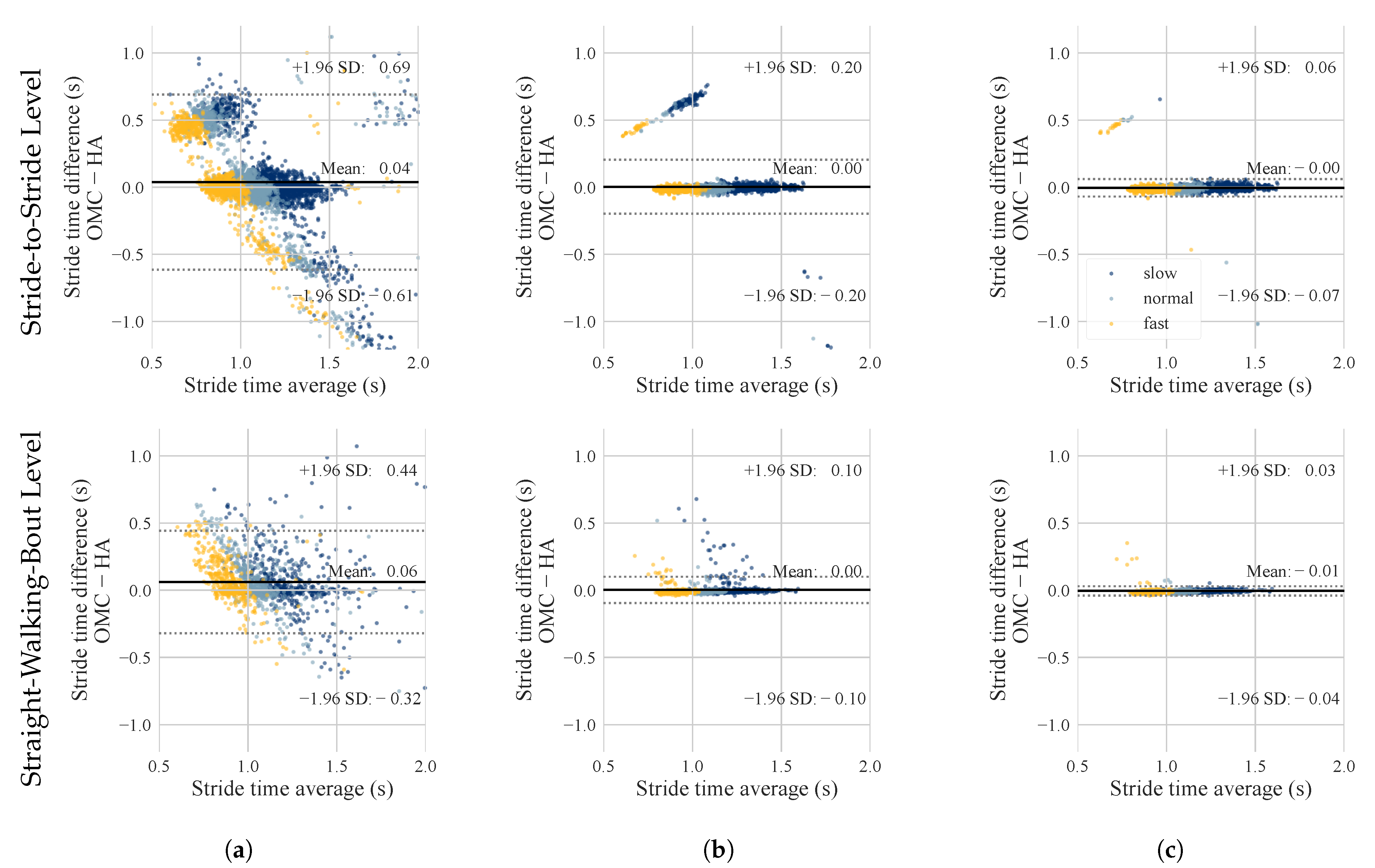
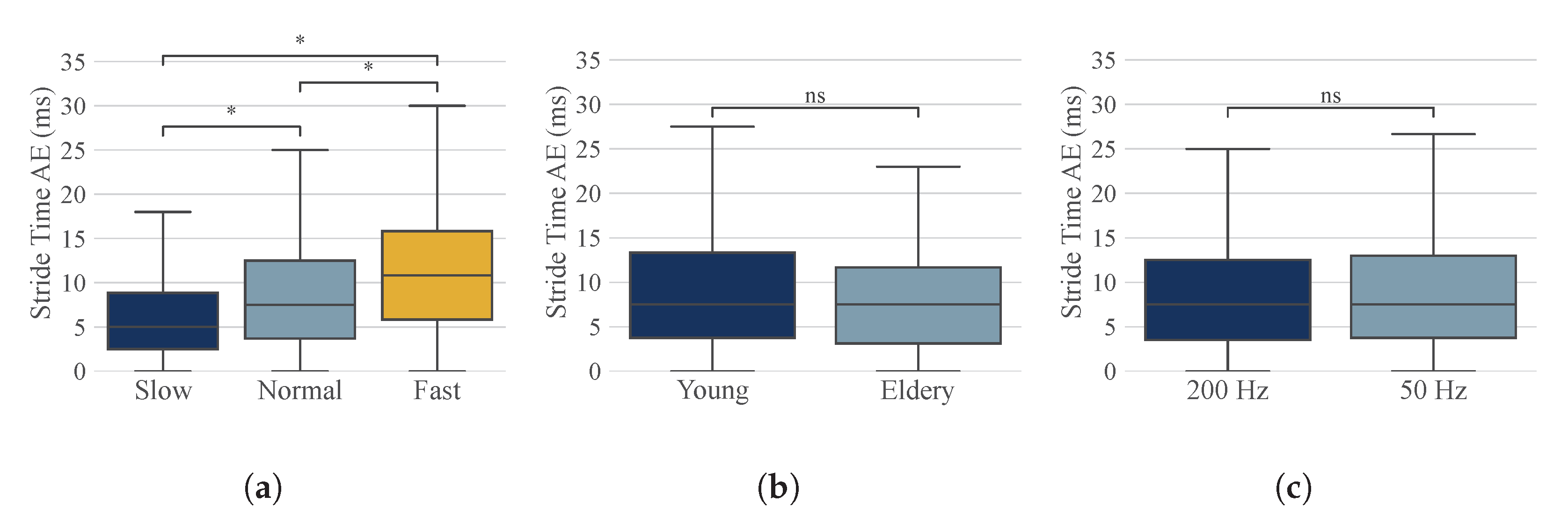
3.2. Temporal Parameters
4. Discussion
4.1. Comparison of Algorithms
4.2. Laterality Enhancement
4.3. Temporal Parameters
4.4. Usability
4.5. Limitations and Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CL | Contralateral |
| HA | Hearing aid |
| IC | Initial contact |
| IL | Ipsilateral |
| IMU | Inertial measurement unit |
| AE | Absolute error |
| ML | Medial–lateral |
| OMC | Optical motion capture |
| PA | Posterior–anterior |
| SD | Standard deviation |
| SE | Signed error |
| SI | Superior–inferior |
| SSA | Singular Spectrum Analysis |
| TC | Terminal Contact |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stride-to-Stride Level | Straight-Walk Level | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Slow | Normal | Fast | Young | Elderly | Slow | Normal | Fast | Young | Elderly | |||
| AE | Stride time (ms) | 9 ± 13 | 11 ± 39 | 16 ± 43 | 11 ± 26 | 12 ± 36 | 7 ± 6 | 9 ± 8 | 14 ± 27 | 10 ± 13 | 9 ± 19 | |
| Step time (ms) | 10 ± 8 | 8 ± 18 | 8 ± 7 | 9 ± 12 | 9 ± 12 | 3 ± 3 | 5 ± 12 | 6 ± 4 | 5 ± 8 | 5 ± 8 | ||
| Stance time (ms) | 88 ± 38 | 73 ± 26 | 58 ± 26 | 77 ± 34 | 75 ± 33 | 87 ± 32 | 70 ± 22 | 54 ± 20 | 71 ± 27 | 71 ± 30 | ||
| Swing time (ms) | 90 ± 38 | 77 ± 26 | 62 ± 25 | 79 ± 33 | 77 ± 33 | 89 ± 30 | 75 ± 21 | 59 ± 18 | 75 ± 25 | 74 ± 28 | ||
| SE | Stride time (ms) | −2 ± 16 | −6 ± 40 | −6 ± 45 | −6 ± 28 | −3 ± 37 | −3 ± 8 | −7 ± 9 | −7 ± 29 | −7 ± 15 | −4 ± 20 | |
| Step time (ms) | −1 ± 12 | −3 ± 19 | −5 ± 9 | −4 ± 14 | −2 ± 15 | −1 ± 4 | −3 ± 13 | −6 ± 5 | −4 ± 8 | −3 ± 8 | ||
| Stance time (ms) | 86 ± 43 | 72 ± 28 | 55 ± 31 | 76 ± 38 | 73 ± 38 | 85 ± 36 | 70 ± 23 | 53 ± 22 | 71 ± 28 | 69 ± 34 | ||
| Swing time (ms) | −87 ± 43 | −76 ± 28 | −61 ± 28 | −78 ± 35 | −74 ± 37 | −87 ± 35 | −75 ± 21 | −59 ± 18 | −75 ± 25 | −72 ± 31 | ||
References
- Paolillo, E.W.; Lee, S.Y.; VandeBunte, A.; Djukic, N.; Fonseca, C.; Kramer, J.H.; Casaletto, K.B. Wearable use in an observational study among older adults: Adherence, feasibility, and effects of clinicodemographic factors. Front. Digit. Health 2022, 4, 884208. [Google Scholar] [CrossRef] [PubMed]
- Hillel, I.; Gazit, E.; Nieuwboer, A.; Avanzino, L.; Rochester, L.; Cereatti, A.; Croce, U.D.; Rikkert, M.O.; Bloem, B.R.; Pelosin, E.; et al. Is every-day walking in older adults more analogous to dual-task walking or to usual walking? Elucidating the gaps between gait performance in the lab and during 24/7 monitoring. Eur. Rev. Aging Phys. Act. 2019, 16, 6. [Google Scholar] [CrossRef] [PubMed]
- Yusif, S.; Soar, J.; Hafeez-Baig, A. Older people, assistive technologies, and the barriers to adoption: A systematic review. Int. J. Med. Inform. 2016, 94, 112–116. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moore, K.; O’Shea, E.; Kenny, L.; Barton, J.; Tedesco, S.; Sica, M.; Crowe, C.; Alamäki, A.; Condell, J.; Nordström, A.; et al. Older adults’ experiences with using wearable devices: Qualitative systematic review and meta-synthesis. JMIR mHealth uHealth 2021, 9, e23832. [Google Scholar] [CrossRef]
- Das Antar, A.; Ahmed, M.; Ahad, M.A.R. Challenges in sensor-based human activity recognition and a comparative analysis of benchmark datasets: A review. In Proceedings of the 2019 Joint 8th International Conference on Informatics, Electronics & Vision (ICIEV) and 2019 3rd International Conference on Imaging, Vision & Pattern Recognition (icIVPR), Spokane, WA, USA, 30 May–2 June 2019; pp. 134–139. [Google Scholar]
- Röddiger, T.; Clarke, C.; Breitling, P.; Schneegans, T.; Zhao, H.; Gellersen, H.; Beigl, M. Sensing with earables: A systematic literature review and taxonomy of phenomena. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2022, 6, 135. [Google Scholar] [CrossRef]
- Bhowmik, A.K.; Fabry, D.A.; Armour, P.; Berghel, H.; Charette, R.N.; King, J.L. Hear, now, and in the future: Transforming hearing aids into multipurpose devices. Computer 2021, 54, 108–120. [Google Scholar] [CrossRef]
- Graydon, K.; Waterworth, C.; Miller, H.; Gunasekera, H. Global burden of hearing impairment and ear disease. J. Laryngol. Otol. 2019, 133, 18–25. [Google Scholar] [CrossRef] [Green Version]
- Rahme, M.; Folkeard, P.; Scolli, S. Evaluating the accuracy of step tracking and fall detection in the Starkey Livio Artificial Intelligence hearing aids: A pilot study. Am. J. Audiol. 2021, 30, 182–189. [Google Scholar] [CrossRef]
- Howcroft, J.; Kofman, J.; Lemaire, E.; McIlroy, W. Analysis of dual-task elderly gait in fallers and non-fallers using wearable sensors. J. Biomech. 2016, 49, 992–1001. [Google Scholar] [CrossRef]
- Mulas, I.; Putzu, V.; Asoni, G.; Viale, D.; Mameli, I.; Pau, M. Clinical assessment of gait and functional mobility in Italian healthy and cognitively impaired older persons using wearable inertial sensors. Aging Clin. Exp. Res. 2021, 33, 1853–1864. [Google Scholar] [CrossRef]
- Feldman, R.; Schreiber, S.; Been, E. Gait, balance and posture in major mental illnesses: Depression, anxiety and schizophrenia. Austin Med. Sci. 2020, 5, 1039. [Google Scholar]
- Pirker, W.; Katzenschlager, R. Gait disorders in adults and the elderly: A clinical guide. Wien. Klin. Wochenschr. 2017, 129, 81–95. [Google Scholar] [CrossRef] [Green Version]
- Brognara, L.; Palumbo, P.; Grimm, B.; Palmerini, L. Assessing gait in Parkinson’s disease using wearable motion sensors: A systematic review. Diseases 2019, 7, 18. [Google Scholar] [CrossRef] [Green Version]
- Lindemann, U.; Hock, A.; Stuber, M.; Keck, W.; Becker, C. Evaluation of a fall detector based on accelerometers: A pilot study. Med. Biol. Eng. Comput. 2005, 43, 548–551. [Google Scholar] [CrossRef]
- Benson, L.C.; Clermont, C.A.; Bošnjak, E.; Ferber, R. The use of wearable devices for walking and running gait analysis outside of the lab: A systematic review. Gait Posture 2018, 63, 124–138. [Google Scholar] [CrossRef]
- Hellec, J.; Chorin, F.; Castagnetti, A.; Colson, S.S. Sit-To-Stand movement evaluated using an inertial measurement unit embedded in smart glasses—A validation study. Sensors 2020, 20, 5019. [Google Scholar] [CrossRef]
- Burgos, C.P.; Gärtner, L.; Ballester, M.A.G.; Noailly, J.; Stöcker, F.; Schönfelder, M.; Adams, T.; Tassani, S. In-ear accelerometer-based sensor for gait classification. IEEE Sens. J. 2020, 20, 12895–12902. [Google Scholar] [CrossRef]
- Atallah, L.; Lo, B.; Yang, G.Z.; Aziz, O. Detecting walking gait impairment with an ear-worn sensor. In Proceedings of the 2009 Sixth International Workshop on Wearable and Implantable Body Sensor Networks, Berkeley, CA, USA, 3–5 June 2009; pp. 175–180. [Google Scholar]
- Jiang, N.; Sim, T.; Han, J. EarWalk-towards walking posture identification using earables. In Proceedings of the 23rd Annual International Workshop on Mobile Computing Systems and Applications, Tempe, AZ, USA, 9–10 March 2022; pp. 35–40. [Google Scholar]
- Zihajehzadeh, S.; Park, E.J. A Gaussian process regression model for walking speed estimation using a head-worn IMU. In Proceedings of the 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Jeju Island, Republic of Korea, 11–15 July 2017; pp. 2345–2348. [Google Scholar]
- Atallah, L.; Wiik, A.; Jones, G.; Lo, B.; Cobb, J.; Amis, A.; Yang, G. Validation of an ear-worn sensor for gait monitoring using a force-plate instrumented treadmill. Gait Posture 2012, 35, 674–676. [Google Scholar] [CrossRef] [Green Version]
- Soltani, A.; Aminian, K.; Mazza, C.; Cereatti, A.; Palmerini, L.; Bonci, T.; Paraschiv-Ionescu, A. Algorithms for walking speed estimation using a lower-back-worn inertial sensor: A cross-validation on speed ranges. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 1955–1964. [Google Scholar] [CrossRef]
- Hannink, J.; Kautz, T.; Pasluosta, C.F.; Barth, J.; Schülein, S.; Gaßmann, K.G.; Klucken, J.; Eskofier, B.M. Mobile stride length estimation with deep convolutional neural networks. IEEE J. Biomed. Health Inform. 2017, 22, 354–362. [Google Scholar] [CrossRef] [Green Version]
- Hwang, T.H.; Reh, J.; Effenberg, A.O.; Blume, H. Real-time gait analysis using a single head-worn inertial measurement unit. IEEE Trans. Consum. Electron. 2018, 64, 240–248. [Google Scholar] [CrossRef]
- Jarchi, D.; Wong, C.; Kwasnicki, R.M.; Heller, B.; Tew, G.A.; Yang, G.Z. Gait parameter estimation from a miniaturized ear-worn sensor using singular spectrum analysis and longest common subsequence. IEEE Trans. Biomed. Eng. 2014, 61, 1261–1273. [Google Scholar] [CrossRef] [PubMed]
- Diao, Y.; Ma, Y.; Xu, D.; Chen, W.; Wang, Y. A novel gait parameter estimation method for healthy adults and postoperative patients with an ear-worn sensor. Physiol. Meas. 2020, 41, 05NT01. [Google Scholar] [CrossRef] [PubMed]
- Ullrich, M.; Kuderle, A.; Reggi, L.; Cereatti, A.; Eskofier, B.M.; Kluge, F. Machine learning-based distinction of left and right foot contacts in lower back inertial sensor gait data. In Proceedings of the 43rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Virtually, 30 October–1 November 2021; pp. 5958–5961. [Google Scholar]
- Yogev, G.; Plotnik, M.; Peretz, C.; Giladi, N.; Hausdorff, J.M. Gait asymmetry in patients with Parkinson’s disease and elderly fallers: When does the bilateral coordination of gait require attention? Exp. Brain Res. 2007, 177, 336–346. [Google Scholar] [CrossRef] [PubMed]
- Seifer, A.K.; Küderle, A. EarGait: A Gait Analysis Package for Ear-Worn IMU Sensors. 2022. Available online: https://github.com/mad-lab-fau/eargait (accessed on 12 April 2023).
- Roth, N.; Martindale, C.F.; Eskofier, B.M.; Gaßner, H.; Kohl, Z.; Klucken, J. Synchronized Sensor Insoles for Clinical Gait Analysis in Home-Monitoring Applications. Curr. Dir. Biomed. Eng. 2018, 4, 433–437. [Google Scholar] [CrossRef]
- Ferraris, F.; Grimaldi, U.; Parvis, M. Procedure for effortless in-field calibration of three-axis rate gyros and accelerometers. Sens. Mater. 1995, 7, 311–330. [Google Scholar]
- Barth, J.; Oberndorfer, C.; Kugler, P.; Schuldhaus, D.; Winkler, J.; Klucken, J.; Eskofier, B. Subsequence dynamic time warping as a method for robust step segmentation using gyroscope signals of daily life activies. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 6744–6747. [Google Scholar]
- Ollenschläger, M.; Küderle, A.; Mehringer, W.; Seifer, A.K.; Winkler, J.; Gaßner, H.; Kluge, F.; Eskofier, B.M. MaD GUI: An open-source Python package for annotation and analysis of time-series data. Sensors 2022, 22, 5849. [Google Scholar] [CrossRef]
- Bruening, D.A.; Ridge, S.T. Automated event detection algorithms in pathological gait. Gait Posture 2014, 39, 472–477. [Google Scholar] [CrossRef]
- Zeni, J.A.; Richards, J.G.; Higginson, J.S. Two simple methods for determining gait events during treadmill and overground walking using kinematic data. Gait Posture 2008, 27, 710–714. [Google Scholar] [CrossRef] [Green Version]
- Küderle, A.; Ullrich, M.; Roth, N.; Ollenschläger, M.; Ahmed, A.; Moradi, H.; Simpetru, R.C.; Prossel, D.; Herzer, L.; Kluge, F.; et al. Gaitmap: The Gait and Movement Analysis Package. 2023. Available online: https://github.com/mad-lab-fau/gaitmap (accessed on 15 June 2023).
- Golyandina, N.; Nekrutkin, V.; Zhigljavsky, A.A. Analysis of Time Series Structure: SSA and Related Techniques; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Rampp, A.; Barth, J.; Schülein, S.; Gaßmann, K.G.; Klucken, J.; Eskofier, B.M. Inertial sensor-based stride parameter calculation from gait sequences in geriatric patients. IEEE Trans. Biomed. Eng. 2014, 62, 1089–1097. [Google Scholar] [CrossRef]
- Wei, T.S.; Liu, P.T.; Chang, L.W.; Liu, S.Y. Gait asymmetry, ankle spasticity, and depression as independent predictors of falls in ambulatory stroke patients. PLoS ONE 2017, 12, 14. [Google Scholar] [CrossRef]
- Ghoraani, B.; Boettcher, L.N.; Hssayeni, M.D.; Rosenfeld, A.; Tolea, M.I.; Galvin, J.E. Detection of mild cognitive impairment and Alzheimer’s disease using dual-task gait assessments and machine learning. Biomed. Signal Process. Control 2021, 64, 102249. [Google Scholar] [CrossRef]
- Oh-Park, M.; Holtzer, R.; Xue, X.; Verghese, J. Conventional and robust quantitative gait norms in community-dwelling older adults. J. Am. Geriatr. Soc. 2010, 58, 1512–1518. [Google Scholar] [CrossRef] [Green Version]
- Zijlstra, W.; Hof, A.L. Assessment of spatio-temporal gait parameters from trunk accelerations during human walking. Gait Posture 2003, 18, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Trojaniello, D.; Cereatti, A.; Della Croce, U. Accuracy, sensitivity and robustness of five different methods for the estimation of gait temporal parameters using a single inertial sensor mounted on the lower trunk. Gait Posture 2014, 40, 487–492. [Google Scholar] [CrossRef]
- Storm, F.A.; Buckley, C.J.; Mazzà, C. Gait event detection in laboratory and real life settings: Accuracy of ankle and waist sensor based methods. Gait Posture 2016, 50, 42–46. [Google Scholar] [CrossRef] [Green Version]
- Vogels, E.A. About One-in-Five Americans Use a Smart Watch or Fitness Tracker. 2020. Available online: https://www.pewresearch.org/fact-tank/2020/01/09/about-one-in-five-americans-use-a-smart-watch-or-fitness-tracker/ (accessed on 12 October 2022).
- Chien, W. Prevalence of hearing aid use among older adults in the United States. Arch. Intern. Med. 2012, 172, 292. [Google Scholar] [CrossRef] [Green Version]






| Characteristic | Young | Elderly |
|---|---|---|
| Gender (m/f) | 11/16 | 10/11 |
| Age (years) | 31 ± 11 | 71 ± 6 |
| Height (cm) | 172 ± 8 | 167 ± 8 |
| Weight (kg) | 64 ± 9 | 72 ± 10 |
| Hearing loss * (yes/no) | 0/27 | 9/12 |
| Self-selected walking speed (m s−1) | ||
| slow ** | 1.06 ± 0.15 | 1.09 ± 0.14 |
| normal ** | 1.38 ± 0.07 | 1.36 ± 0.12 |
| fast ** | 1.85 ± 0.16 | 1.72 ± 0.14 |
| Jarchi | Diao Original | Diao Improved | ||
|---|---|---|---|---|
| 200 Hz | 200 Hz | 200 Hz | 50 Hz | |
| IC (%) | 85.8 | 99.1 | 99.8 | 99.8 |
| TC (%) | 71.2 | 93.5 | 97.5 | 97.4 |
| Laterality Determination (%) | 87.4 | 98.9 | 99.5 | 99.4 |
| Stride-to-Stride Level | Straight-Walk Level | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Diao Improved | Diao Original | Jarchi | Diao Improved | Diao Original | Jarchi | ||||
| 200 Hz | 50 Hz | 200 Hz | 200 Hz | 200 Hz | 50 Hz | 200 Hz | 200 Hz | ||
| AE | Stride time (ms) | 12 ± 32 | 14 ± 36 | 24 ± 100 | 170 ± 288 | 10 ± 16 | 11 ± 21 | 17 ± 47 | 129 ± 158 |
| Step time (ms) | 9 ± 12 | 11 ± 13 | 9 ± 12 | 64 ± 94 | 5 ± 8 | 5 ± 7 | 5 ± 8 | 34 ± 55 | |
| Stance time (ms) | 76 ± 34 | 76 ± 36 | 76 ± 33 | 201 ± 247 | 71 ± 29 | 71 ± 29 | 72 ± 29 | 160 ± 161 | |
| Swing time (ms) | 78 ± 33 | 78 ± 34 | 78 ± 32 | 154 ± 144 | 74 ± 27 | 74 ± 27 | 75 ± 27 | 109 ± 72 | |
| SE | Stride time (ms) | −4 ± 33 | −4 ± 39 | 3 ± 103 | 37 ± 333 | −6 ± 18 | −5 ± 23 | 2 ± 50 | 61 ± 195 |
| Step time (ms) | −3 ± 15 | −3 ± 17 | −3 ± 15 | −7 ± 113 | −3 ± 8 | −3 ± 8 | −3 ± 8 | −10 ± 64 | |
| Stance time (ms) | 74 ± 38 | 74 ± 41 | 75 ± 36 | −50 ± 314 | 70 ± 31 | 70 ± 31 | 71 ± 31 | −46 ± 223 | |
| Swing time (ms) | −76 ± 36 | −76 ± 38 | −77 ± 35 | 72 ± 198 | −74 ± 28 | −74 ± 28 | −74 ± 29 | 66 ± 113 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seifer, A.-K.; Dorschky, E.; Küderle, A.; Moradi, H.; Hannemann, R.; Eskofier, B.M. EarGait: Estimation of Temporal Gait Parameters from Hearing Aid Integrated Inertial Sensors. Sensors 2023, 23, 6565. https://doi.org/10.3390/s23146565
Seifer A-K, Dorschky E, Küderle A, Moradi H, Hannemann R, Eskofier BM. EarGait: Estimation of Temporal Gait Parameters from Hearing Aid Integrated Inertial Sensors. Sensors. 2023; 23(14):6565. https://doi.org/10.3390/s23146565
Chicago/Turabian StyleSeifer, Ann-Kristin, Eva Dorschky, Arne Küderle, Hamid Moradi, Ronny Hannemann, and Björn M. Eskofier. 2023. "EarGait: Estimation of Temporal Gait Parameters from Hearing Aid Integrated Inertial Sensors" Sensors 23, no. 14: 6565. https://doi.org/10.3390/s23146565
APA StyleSeifer, A. -K., Dorschky, E., Küderle, A., Moradi, H., Hannemann, R., & Eskofier, B. M. (2023). EarGait: Estimation of Temporal Gait Parameters from Hearing Aid Integrated Inertial Sensors. Sensors, 23(14), 6565. https://doi.org/10.3390/s23146565