
Flow Ripple Reduction in Reciprocating Pumps by Multi-Phase Rectification

 , and
, and
Abstract
:1. Introduction
2. Theory
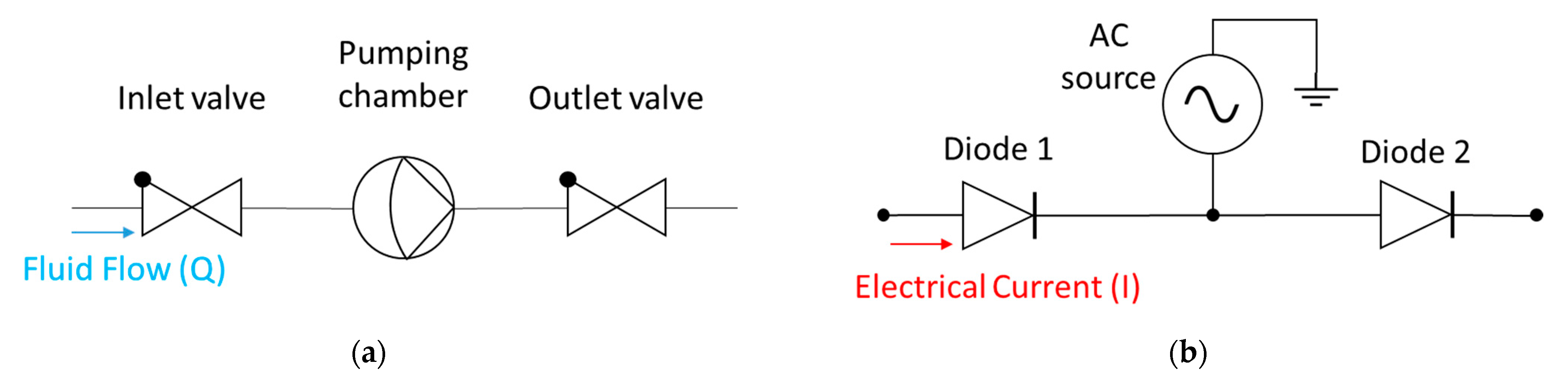
2.1. Rectification Analogy with Electrical Elements
2.2. Multi-Phase Rectification
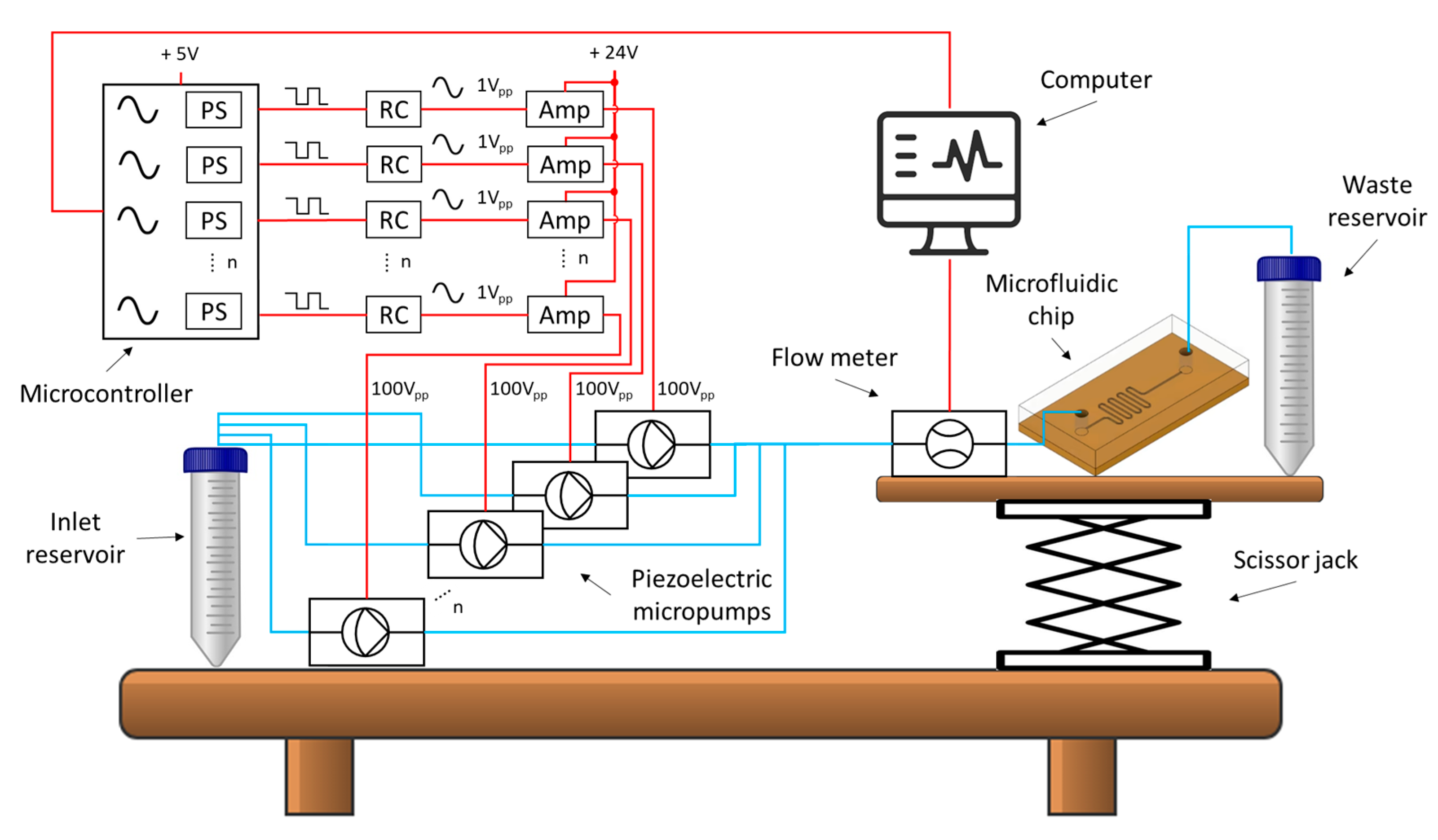
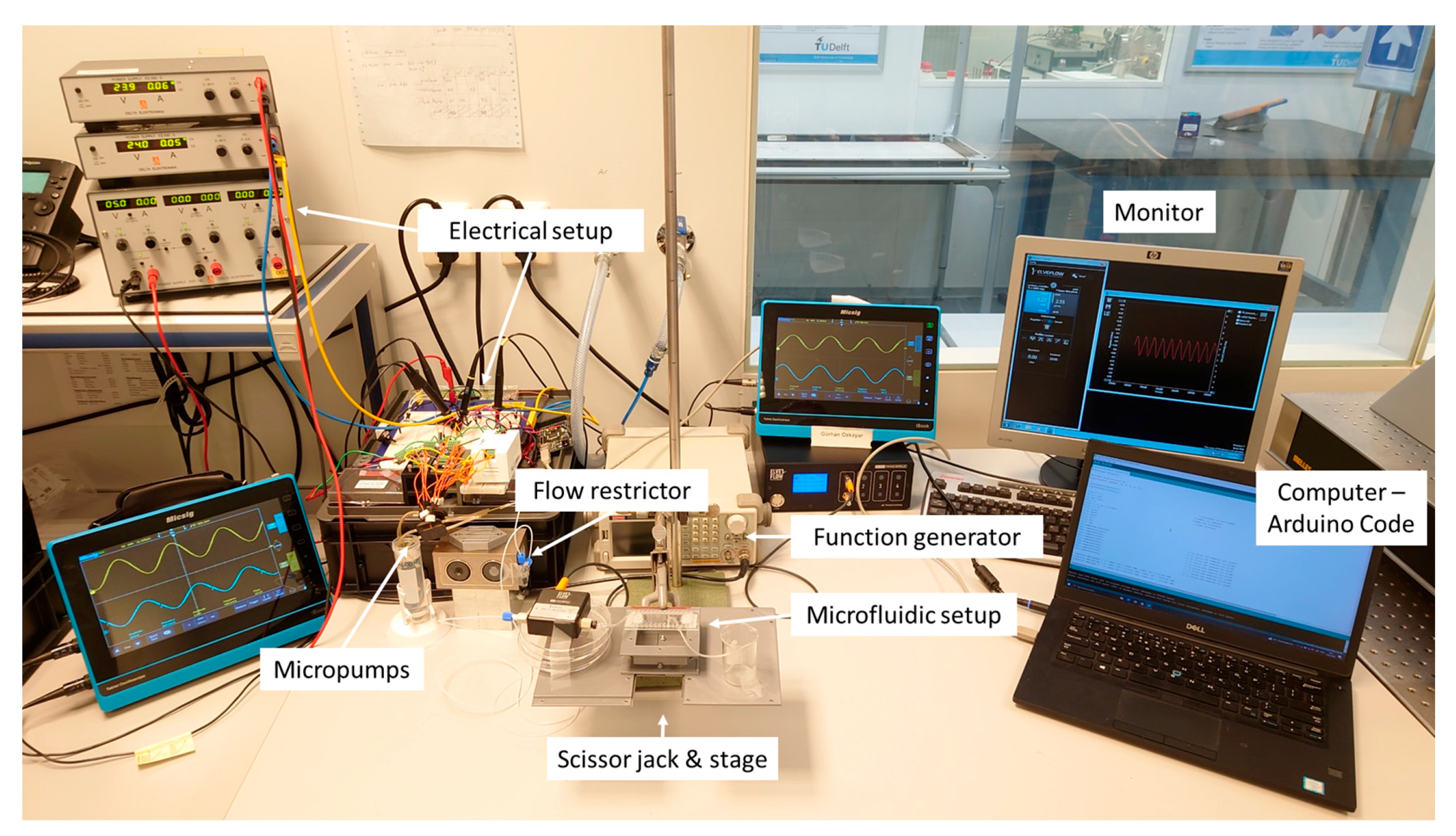
3. Materials and Methods
4. Results and Discussion
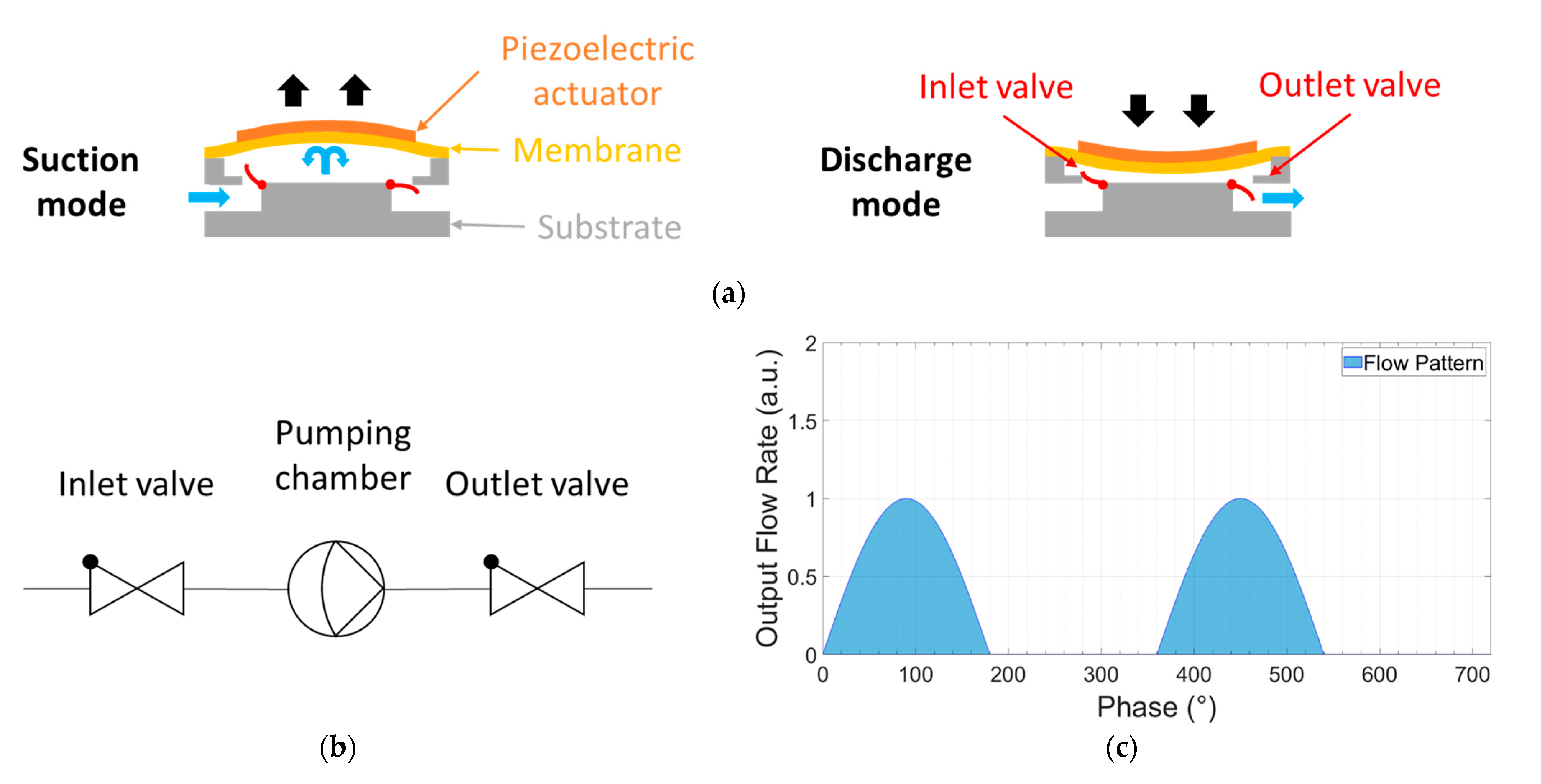
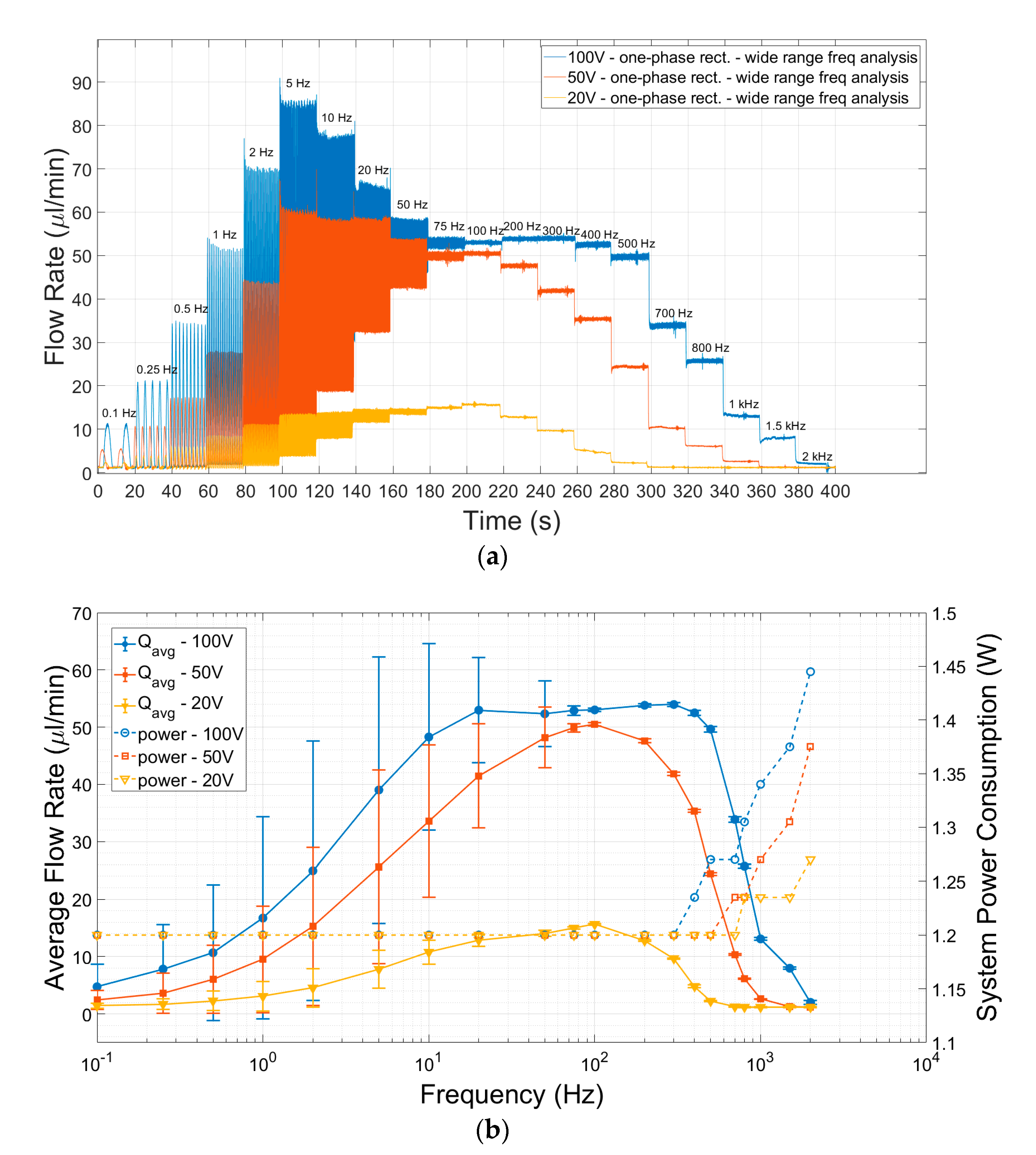
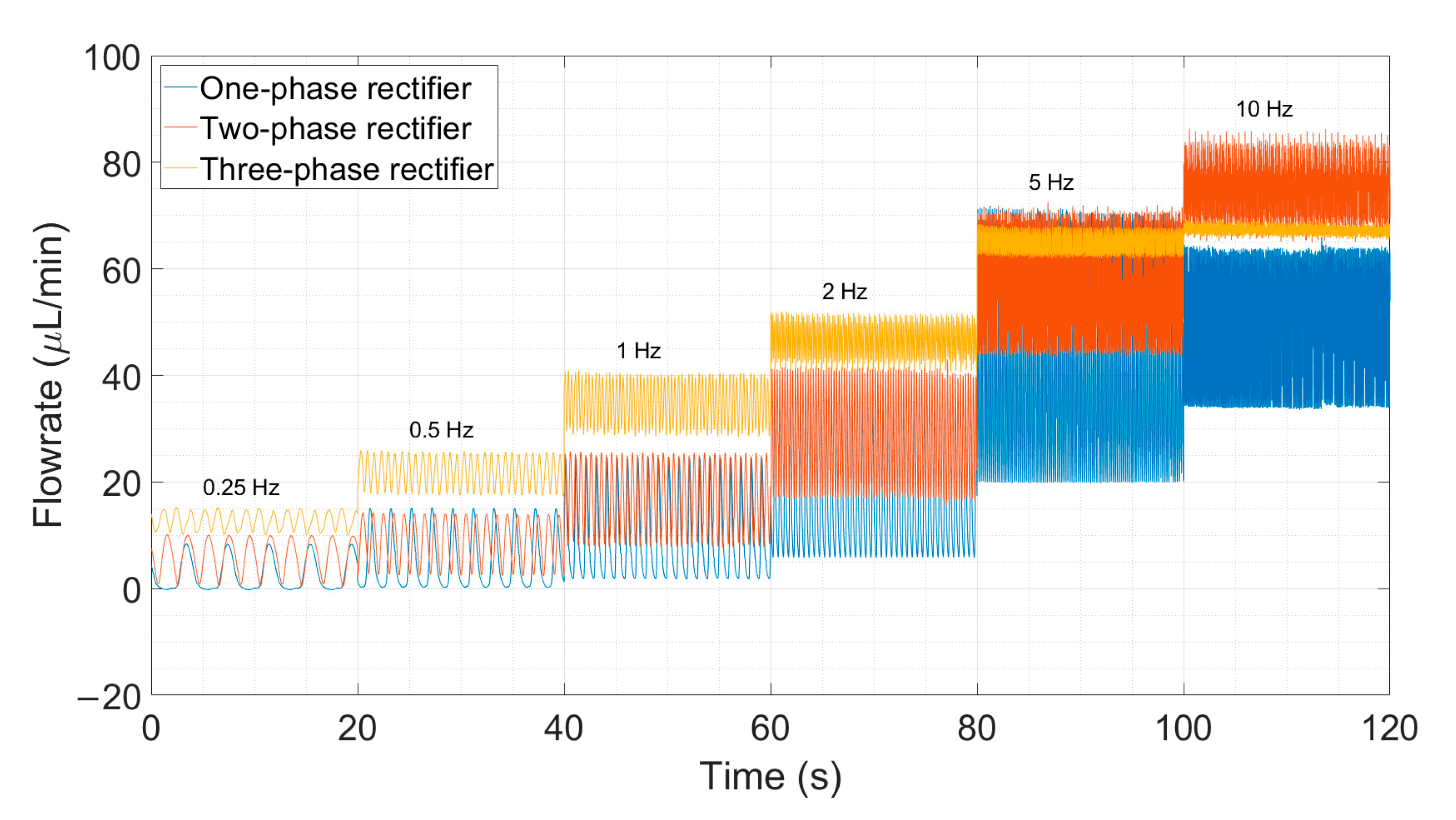
4.1. Performance of a One-Phase Rectifier
4.2. Performances of Multi-Phase Rectifiers
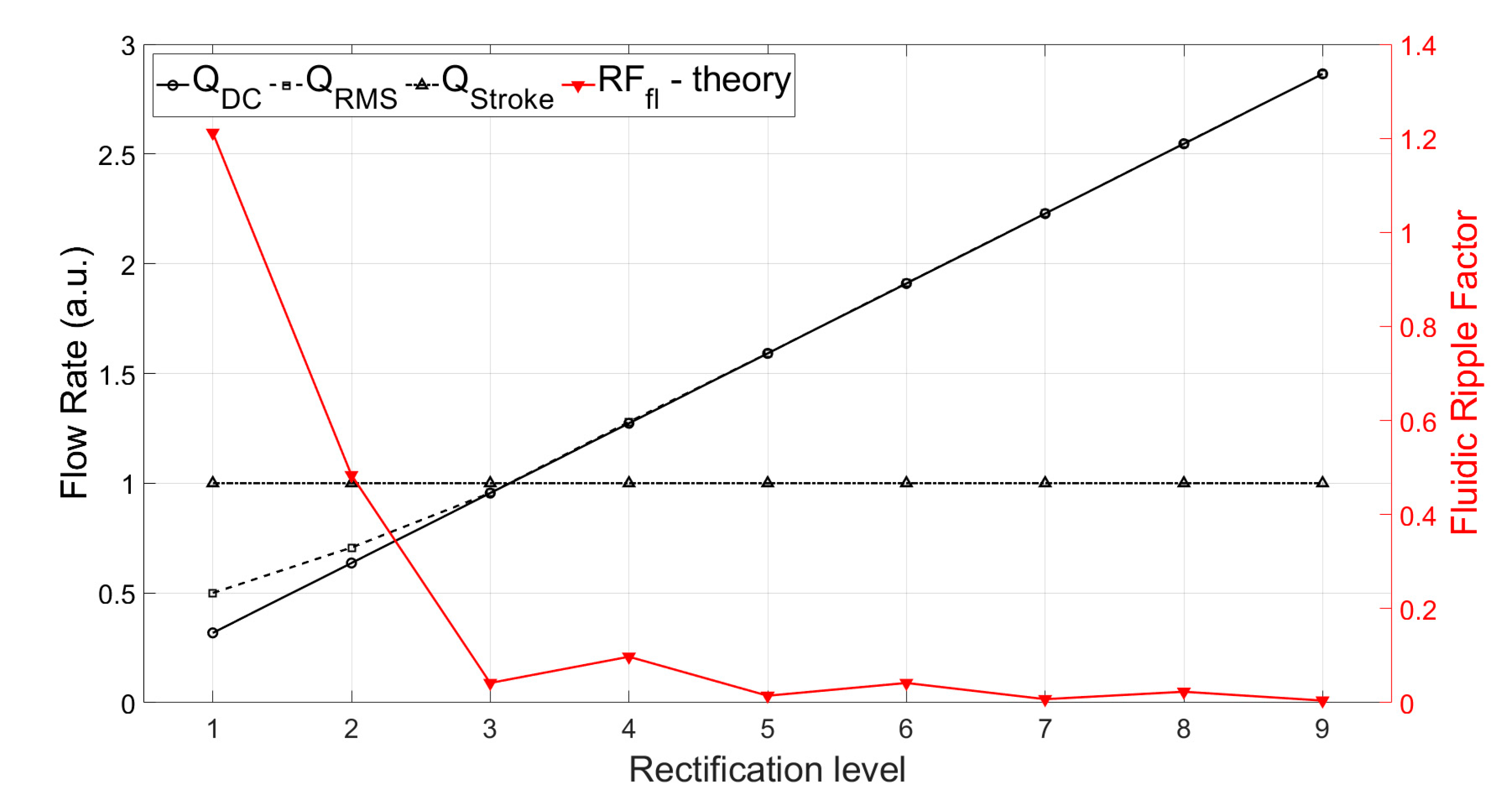
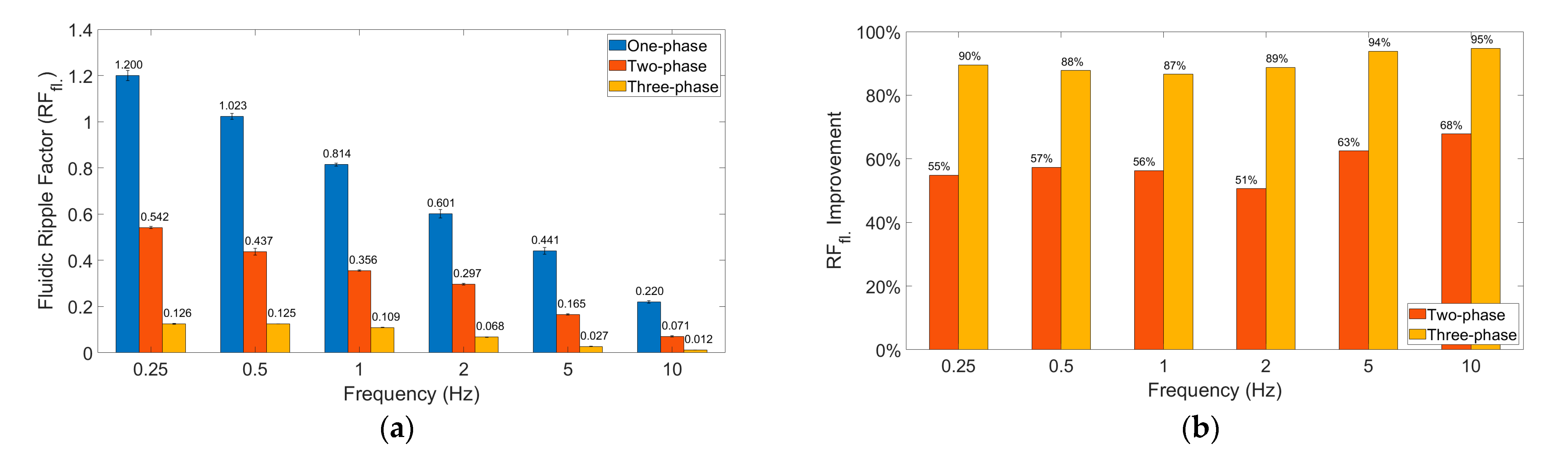
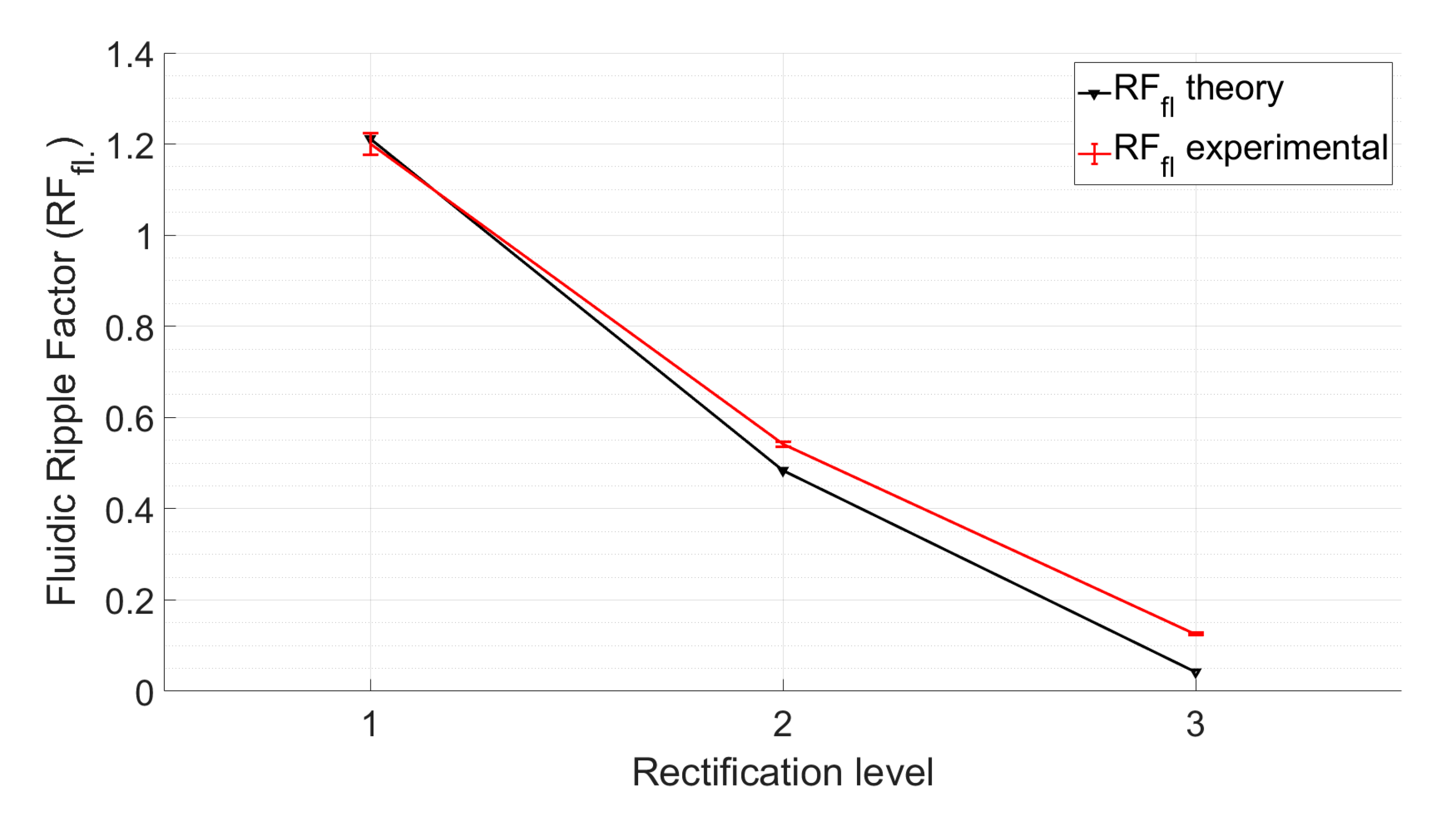
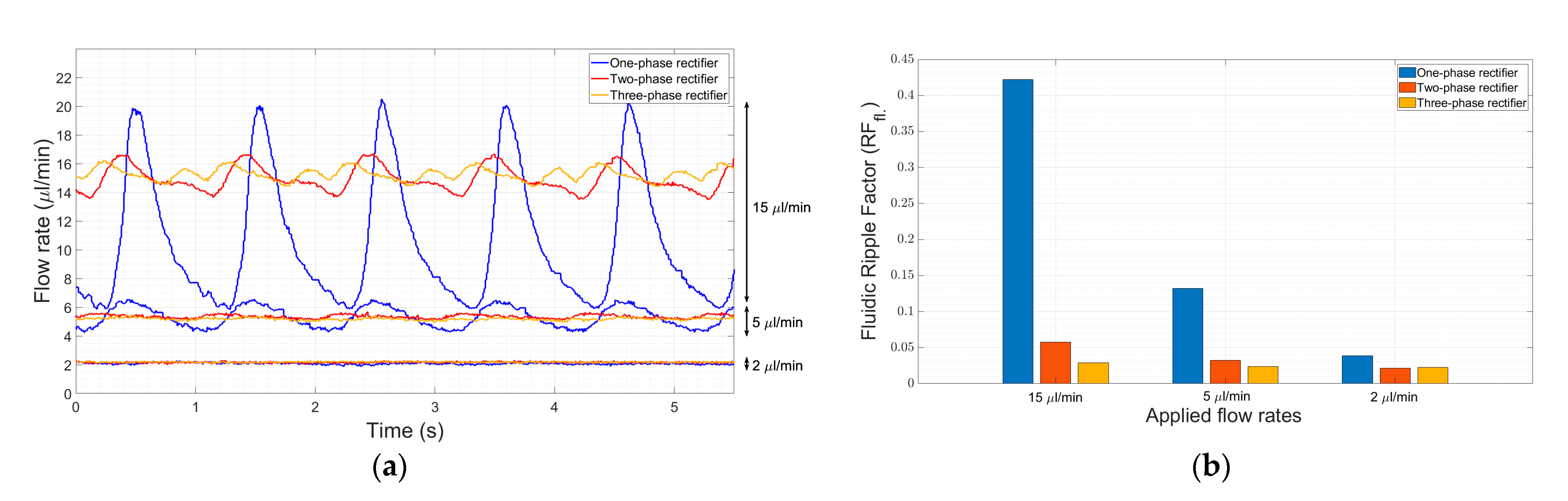
4.2.1. Improvement in Ripple Factor
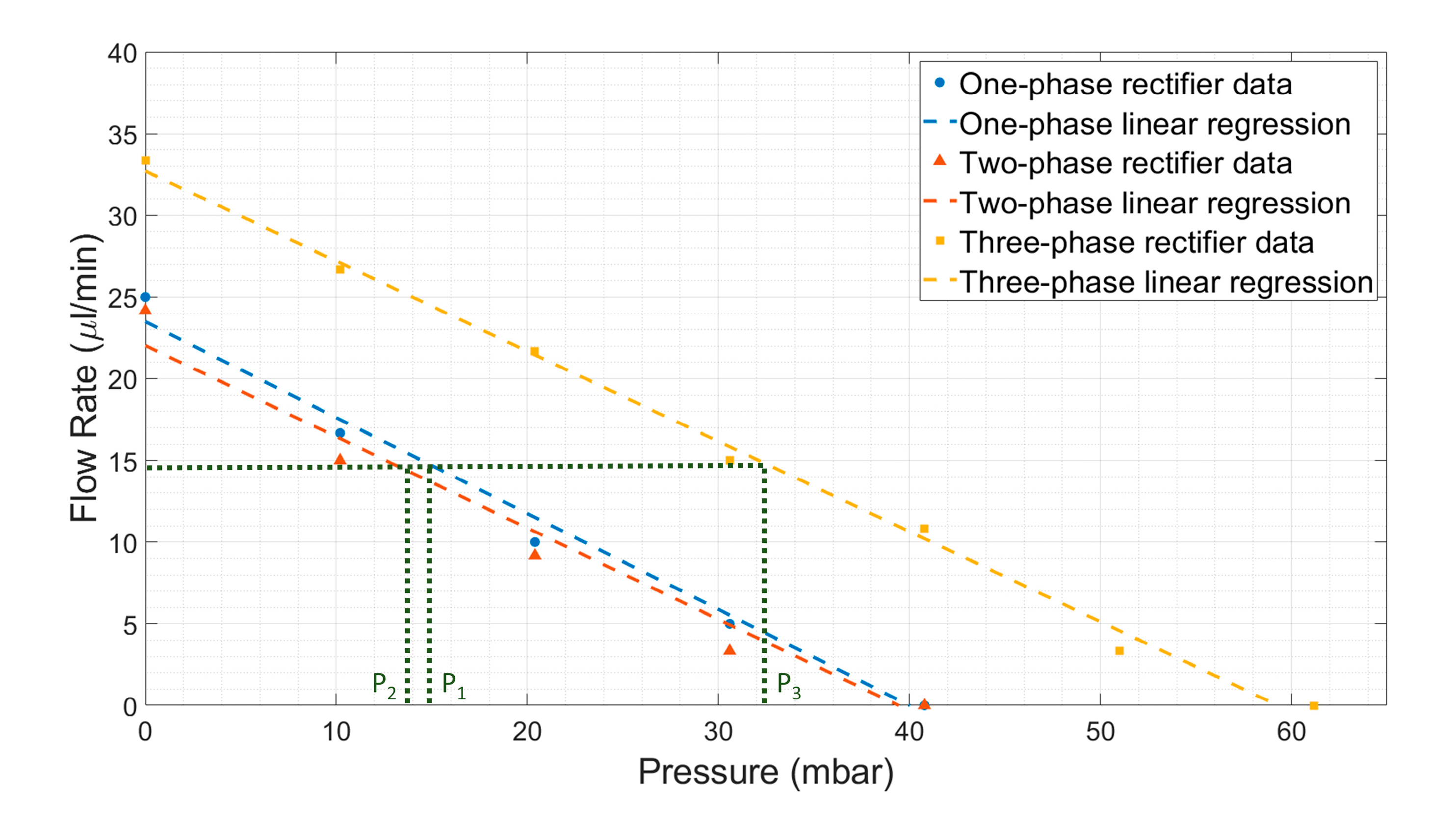
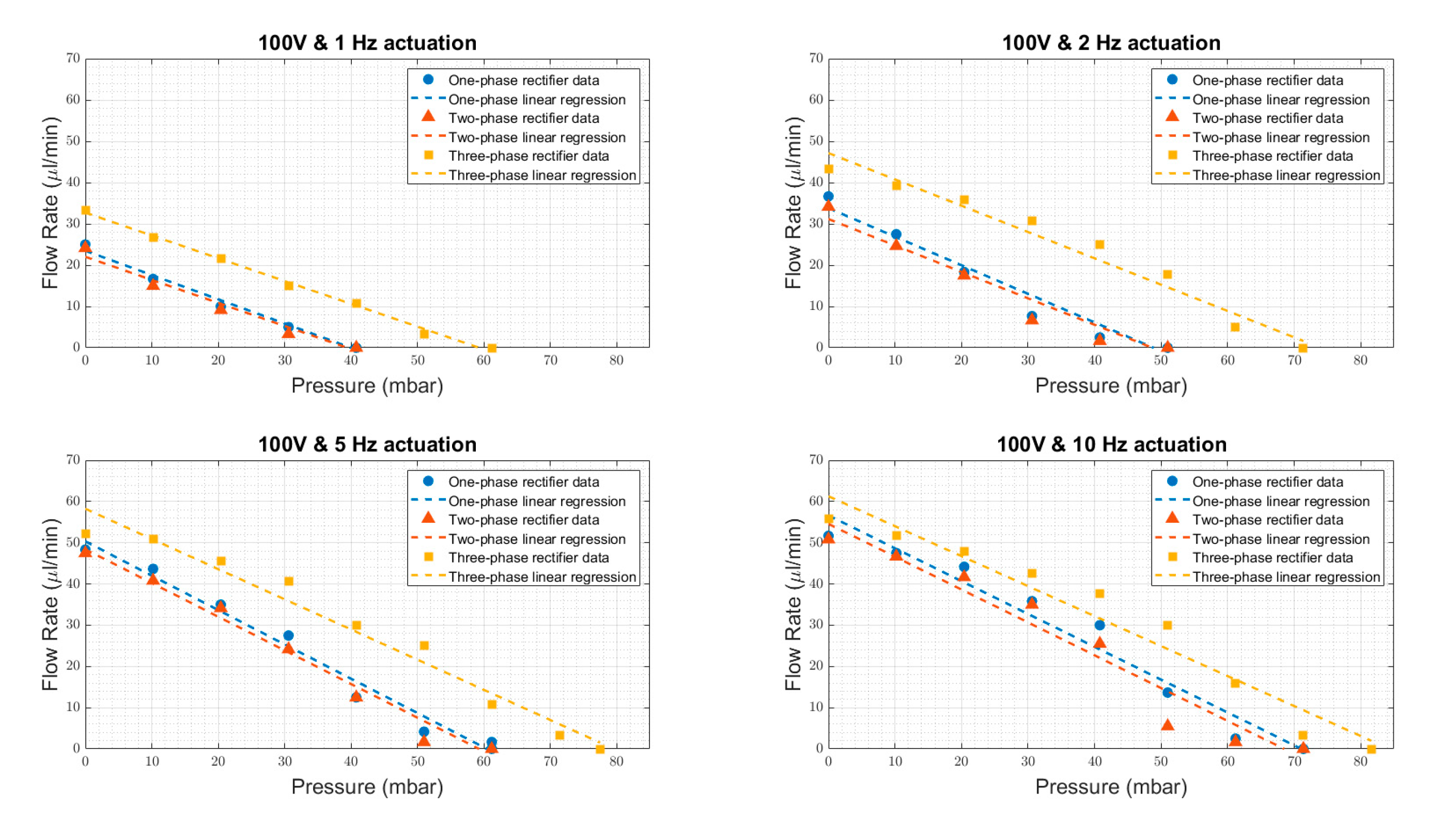
4.2.2. Influence of Multi-Phase Rectification on Back Pressure
4.2.3. Obtaining Very Low Flow Rates
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rectified Output Flow Profiles | Description |
|---|---|
 |
|
 |
|
 |
|
 |
|
| Rectified Output Flow Profiles | |
|---|---|
 |  |
 |  |
 |  |
 |  |
 | |
Appendix C
Appendix D

Appendix E
| Effective Flow Profiles Obtained from the Assumed Sinusoidal Flow Profiles of Individual Pumps (Theory) | Effective Flow Profiles Obtained from the Actual Response of Individual Pumps Actuated by Sinusoidal Waveforms (Experiments) | Comparison of the Flow Profiles (Theory and Experiments) | |
|---|---|---|---|
| One-phase |  |  |  |
| Two-phase |  |  |  |
| Three-phase |  |  |  |
Appendix F
| Waveform Graphs | ||||||
|---|---|---|---|---|---|---|
| Initial Waveforms in the Model | Obtained Experimental (Zoomed in from Figure 6) Waveforms | Initial Model | Expected Improv. | Experimental | Obtained Improv. | |
| One-phase |  |  | 1.213 | - | 1.023 | - |
| Two-phase |  |  | 0.485 | 60% | 0.437 | 57% |
| Three-phase |  |  | 0.042 | 96.6% | 0.125 | 88% |
Appendix G
| Waveform Graphs | ||||||
|---|---|---|---|---|---|---|
| Initial Waveforms in the Model | Obtained Experimental (Zoomed in from Figure 6) Waveforms | Initial Model | Expected Improv. | Experimental | Obtained Improv. | |
| One-phase |  |  | 1.213 | - | 0.814 | - |
| Two-phase |  |  | 0.485 | 60% | 0.356 | 56% |
| Three-phase |  |  | 0.042 | 96.6% | 0.109 | 87% |
Appendix H

References
- Ghaemi, S. Passive and Active Control of Turbulent Flows. Phys. Fluids 2020, 32, 10–12. [Google Scholar] [CrossRef]
- Cattafesta, L.N.; Sheplak, M. Actuators for Active Flow Control. Annu. Rev. Fluid Mech. 2011, 43, 247–272. [Google Scholar] [CrossRef] [Green Version]
- Sivaramakrishnan, M.; Kothandan, R.; Govindarajan, D.K.; Meganathan, Y.; Kandaswamy, K. Active Microfluidic Systems for Cell Sorting and Separation. Curr. Opin. Biomed. Eng. 2020, 13, 60–68. [Google Scholar] [CrossRef]
- Skurtys, O.; Aguilera, J.M. Applications of Microfluidic Devices in Food Engineering. Food Biophys. 2008, 3, 1–15. [Google Scholar] [CrossRef]
- Lohse, D. Fundamental Fluid Dynamics Challenges in Inkjet Printing. Annu. Rev. Fluid Mech. 2021, 54, 349–382. [Google Scholar] [CrossRef]
- Kim, B.H.; Kim, I.C.; Kang, Y.J.; Ryu, J.; Lee, S.J. Effect of Phase Shift on Optimal Operation of Serial-Connected Valveless Micropumps. Sens. Actuators A Phys. 2014, 209, 133–139. [Google Scholar] [CrossRef]
- McDonald, K.; Ranzani, T. Hardware Methods for Onboard Control of Fluidically Actuated Soft Robots. Front. Robot. AI 2021, 8, 720702. [Google Scholar] [CrossRef]
- Byun, C.K.; Abi-Samra, K.; Cho, Y.K.; Takayama, S. Pumps for Microfluidic Cell Culture. Electrophoresis 2014, 35, 245–257. [Google Scholar] [CrossRef] [Green Version]
- Hébert, M.; Huissoon, J.; Ren, C.L. A Perspective of Active Microfluidic Platforms as an Enabling Tool for Applications in Other Fields. J. Micromech. Microeng. 2022, 32, 043001. [Google Scholar] [CrossRef]
- Shi, N.; Mohibullah, M.; Easley, C.J. Active Flow Control and Dynamic Analysis in Droplet Microfluidics. Annu. Rev. Anal. Chem. 2021, 14, 133–153. [Google Scholar] [CrossRef]
- Botermans, R.; Smith, P. Pumps 2.1. In Advanced Piping Design; Gulf Publishing Company: Houston, TX, USA, 2008; pp. 23–55. [Google Scholar]
- De Lima, C.R.; Vatanabe, S.L.; Choi, A.; Nakasone, P.H.; Pires, R.F.; Nelli Silva, E.C. A Biomimetic Piezoelectric Pump: Computational and Experimental Characterization. Sens. Actuators A Phys. 2009, 152, 110–118. [Google Scholar] [CrossRef]
- Chen, J.; Gao, W.; Liu, C.; He, L.; Zeng, Y. Improving Output Performance of a Resonant Piezoelectric Pump by Adding Proof Masses to a U-Shaped Piezoelectric Resonator. Micromachines 2021, 12, 500. [Google Scholar] [CrossRef]
- Yan, Q.; Yin, Y.; Sun, W.; Fu, J. Advances in Valveless Piezoelectric Pumps. Appl. Sci. 2021, 11, 7061. [Google Scholar] [CrossRef]
- Zhao, Y.; Kankala, R.K.; Wang, S.B.; Chen, A.Z. Multi-Organs-on-Chips: Towards Long-Term Biomedical Investigations. Molecules 2019, 24, 675. [Google Scholar] [CrossRef] [Green Version]
- Mitchell, M.J.; King, M.R. Computational and Experimental Models of Cancer Cell Response to Fluid Shear Stress. Front. Oncol. 2013, 3, 44736. [Google Scholar] [CrossRef] [Green Version]
- Leung, C.M.; de Haan, P.; Ronaldson-Bouchard, K.; Kim, G.A.; Ko, J.; Rho, H.S.; Chen, Z.; Habibovic, P.; Jeon, N.L.; Takayama, S.; et al. A Guide to the Organ-on-a-Chip. Nat. Rev. Methods Prim. 2022, 2, 33. [Google Scholar] [CrossRef]
- Özkayar, G.; Lötters, J.C.; Tichem, M.; Ghatkesar, M.K. Toward a Modular, Integrated, Miniaturized, and Portable Microfluidic Flow Control Architecture for Organs-on-Chips Applications. Biomicrofluidics 2022, 16, 021302. [Google Scholar] [CrossRef]
- Beonchip Peristaltic Pump vs. Pressure-Based Microfluidic Flow Control Sytems for Organ on Chip Applications. Available online: https://beonchip.com/peristaltic-vs-pressure-based/ (accessed on 9 September 2022).
- White, C.R.; Frangos, J.A. The Shear Stress of It All: The Cell Membrane and Mechanochemical Transduction. Philos. Trans. R. Soc. B Biol. Sci. 2007, 362, 1459–1467. [Google Scholar] [CrossRef]
- Wang, Y.; Shen, T.; Tan, C.; Fu, J.; Guo, S. Research Status, Critical Technologies, and Development Trends of Hydraulic Pressure Pulsation Attenuator. Chin. J. Mech. Eng. 2021, 34, 14. [Google Scholar] [CrossRef]
- Zanetti-Rocha, L.; Gerges, S.N.Y.; Johnston, D.N.; Arenas, J.P. Rotating Group Design for Vane Pump Flow Ripple Reduction. Int. J. Acoust. Vib. 2013, 18, 192–200. [Google Scholar] [CrossRef]
- Hong, H.; Zhao, C.; Zhang, B.; Bai, D.; Yang, H. Flow Ripple Reduction of Axial-Piston Pump by Structure Optimizing of Outlet Triangular Damping Groove. Processes 2020, 8, 1664. [Google Scholar] [CrossRef]
- Kalantarifard, A.; Alizadeh Haghighi, E.; Elbuken, C. Damping Hydrodynamic Fluctuations in Microfluidic Systems. Chem. Eng. Sci. 2018, 178, 238–247. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Xu, N.; Yang, R. Flow Pulsation Reduction of a Single-Piston Piezoelectric Pump Based on Elastic Cavity Group and Unloading Valve. Adv. Mech. Eng. 2021, 13, 16878140211031023. [Google Scholar] [CrossRef]
- Kim, J.; Yoon, G.H.; Noh, J.; Lee, J.; Kim, K.; Park, H.; Hwangc, J.; Lee, Y. Development of Optimal Diaphragm-Based Pulsation Damper Structure for High-Pressure GDI Pump Systems through Design of Experiments. Mechatronics 2013, 23, 369–380. [Google Scholar] [CrossRef]
- Tweten, D.; Nored, M.; Brun, K. The Physics of Pulsations. Gas Mach. Conf. 2008, 2008, 1–16. [Google Scholar]
- Hendriks, T.; Jansen, R. Pulsation Reduction System for Positive Displacement Pumps. In Proceedings of the Paste 2021: 24th International Conference on Paste, Thickened and Filtered Tailings, Perth, Australia, 21–23 September 2021; pp. 273–286. [Google Scholar] [CrossRef]
- Minav, T.; Laurilia, L.I.; Pyrhonen, J. Axial Piston Pump Flow Ripple Compensation by Adjusting the Pump Speed with an Electric Drive. In Proceedings of the 12th Scandinavian International Conference on Fluid Power, Tampere, Finland, 18–20 May 2011. [Google Scholar]
- Vlot, E.; Keijers, R. Pulsation-Free Hydraulic-Driven Swing Tube Piston Pump. In Proceedings of the Paste 2018: 21st International Seminar on Paste and Thickened Tailings, Perth, Australia, 11–13 April 2018; pp. 195–204. [Google Scholar] [CrossRef] [Green Version]
- O’Shea, C. Hydraulic Flow Ripple Cancellation Using the Primary Flow Source. In Proceedings of the BATH/ASME 2016 Symposium on Fluid Power and Motion Control, Bath, UK, 7–9 September 2016; pp. 1–9. [Google Scholar] [CrossRef]
- ChromTech How Does a Pulse Dampener Work in an HPLC Pump? Available online: https://www.chromtech.com/how-does-a-pulse-dampener-work-in-an-hplc-pump (accessed on 5 December 2022).
- Zhang, X.; Zhu, Z.; Xiang, N.; Ni, Z. A Microfluidic Gas Damper for Stabilizing Gas Pressure in Portable Microfluidic Systems. Biomicrofluidics 2016, 10, 054123. [Google Scholar] [CrossRef] [Green Version]
- Özkayar, G.; Lötters, J.C.; Tichem, M.; Ghatkesar, M.K. Ripple reduction in piezoelectric micropumps by phased actuation in parallel and damping. In Proceedings of the 26th International Conference on MiniaturizedSystems for Chemistry and Life Sciences, CBMS, Hangzhou, China, 23–27 October 2022; pp. 955–956. [Google Scholar]
- Dhananchezhiyan, P.; Hiremath, S.S. Optimization of Multiple Micro Pumps to Maximize the Flow Rate and Minimize the Flow Pulsation. Procedia Technol. 2016, 25, 1226–1233. [Google Scholar] [CrossRef] [Green Version]
- Hsu, C.J.; Sheen, H.J. A Microfluidic Flow-Converter Based on a Double-Chamber Planar Micropump. Microfluid. Nanofluidics 2009, 6, 669–678. [Google Scholar] [CrossRef]
- Oh, K.W.; Lee, K.; Ahn, B.; Furlani, E.P. Design of Pressure-Driven Microfluidic Networks Using Electric Circuit Analogy. Lab Chip 2012, 12, 515–545. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Chow, M.H.L. Diode Rectifiers. In Power Electronics Handbook; Elsevier Inc.: Amsterdam, The Netherlands, 2018; pp. 177–208. ISBN 9780128114070. [Google Scholar]
- Masoum, M.A.S.; Fuchs, E.F. Introduction to Power Quality. In Power Quality in Power Systems and Electrical Machines; Academic Press: Cambridge, MA, USA, 2015; pp. 1–104. ISBN 9780128007822. [Google Scholar]
- PI Ceramic GmbH Electrical Operation of Piezo Actuators. Consumption of the Piezo Actuator&text=100 N Requires Less than, W under the Same Conditions. Available online: https://www.piceramic.com/en/expertise/piezo-technology/properties-piezo-actuators/electrical-operation#:~:text=Power (accessed on 8 November 2022).
- Wise, S.A.; Hooker, M.W. Characterization of Multilayer Piezoelectric Actuators for Use in Active Isolation Mounts. Nasa Tech. Memo. 1997, 15, 4742. [Google Scholar]
- Mikrotechnik, B. Pump Efficiency of Mp6. Available online: https://www.bartels-mikrotechnik.de/ufaq/pump-efficiency-for-mp6/ (accessed on 8 November 2022).
- Biancuzzi, G.; Lemke, T.; Woias, P.; Ruthmann, O.; Schrag, H.J.; Vodermayer, B.; Schmid, T.; Goldschmidtboeing, F. Performance of Piezoelectric Micropumps Actuated by Charge Recovery. Procedia Chem. 2009, 1, 698–701. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Huang, J.; Hu, X.; Xi, Q. Novel Piezoelectric Pump with “E”-Shaped Valve Found from Sub-Experiments. Front. Mech. Eng. China 2010, 5, 212–218. [Google Scholar] [CrossRef]
- Lin, J.C.H.; Yu, F.; Tai, Y.C. Integration of Slanted Tether Check-Valves for High Pressure Applications. In Proceedings of the NEMS 2011-6th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Kaohsiung, Taiwan, 20–23 February 2011; pp. 715–718. [Google Scholar] [CrossRef]
- Hickerson, A.I.; Lu, H.W.; Roskos, K.; Carey, T.; Niemz, A. Disposable Miniature Check Valve Design Suitable for Scalable Manufacturing. Sens. Actuators A Phys. 2013, 203, 76–81. [Google Scholar] [CrossRef] [Green Version]
- Vavra, J.; Biolek, D. A Full-Wave Rectifier Based on Memristive Systems. In Proceedings of the 2nd International Conference on Modelling, Identification and Control, Paris, France, 9–10 August 2015; pp. 91–94. [Google Scholar] [CrossRef]
- Gonzalez, I.; Lehmkuhl, O.; Naseri, A.; Rigola, J.; Assensi, O. Fluid-Structure Interaction of a Reed Type Valve Subjected to Piston Displacement. Int. Compress. Eng. Conf. 2016, 3, 1–10. [Google Scholar]
- Bark, D.L.; Dasi, L.P. The Impact of Fluid Inertia on In Vivo Estimation of Mitral Valve Leaflet Constitutive Properties and Mechanics. Ann. Biomed. Eng. 2016, 44, 1425–1435. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Lin, Q. A Compliance-Based Microflow Stabilizer. J. Microelectromech. Syst. 2009, 18, 539–546. [Google Scholar] [CrossRef]
- Goh, J.-K. Effects of Wall Compliance on Pulsatile Flow Attenuation in Microchannels. Master’s Thesis, San Jose State University, San Jose, CA, USA, 2009. [Google Scholar]










| Rectified Output Flow Profiles | Description |
|---|---|
 |
|
 |
|
 |
|
 |
|
 |
|
| Input Parameters (Phase Rectifier) | Output Parameters (Flow) | |||
|---|---|---|---|---|
| n (# of Pumps) | QDC (µL/min) | QRMS (µL/min) | RFfl. | Ratio of RFfl. to the One-Phase Rectifier |
| 1 | 0.318 | 0.499 | 1.213 | 100% |
| 2 | 0.636 | 0.707 | 0.485 | 40% |
| 3 | 0.955 | 0.956 | 0.042 | 3.4% |
| 4 | 1.273 | 1.279 | 0.098 | 8% |
| 5 | 1.591 | 1.592 | 0.015 | 1.2% |
| 6 | 1.910 | 1.911 | 0.042 | 3.4% |
| 7 | 2.228 | 2.228 | 0.008 | 0.6% |
| 8 | 2.546 | 2.547 | 0.024 | 1.9% |
| 9 | 2.865 | 2.865 | 0.005 | 0.4% |
| 10 | 3.183 | 3.183 | 0.015 | 1.2% |
| ⁞ | ⁞ | ⁞ | ⁞ | ⁞ |
| 18 | 5.729 | 5.729 | 0.005 | 0.4% |
| 19 | 6.048 | 6.048 | 0.001 | 0.08% |
| 20 | 6.366 | 6.366 | 0.004 | 0.3% |
| ⁞ | ⁞ | ⁞ | ⁞ | ⁞ |
| 98 | 31.19 | 31.19 | 1.537 × 10−4 | 0.01% |
| 99 | 31.51 | 31.51 | 3.810 × 10−5 | 0.001% |
| 100 | 31.83 | 31.83 | 1.50 × 10−4 | 0.008% |
| Flow Profile Graphs | ||||||
|---|---|---|---|---|---|---|
| Estimated Flow Profiles by Theoretical Study | Obtained Flow Profiles in the Experiments | Initial Model | Expected Improv. | Experimental | Obtained Improv. | |
| One-phase |  |  | 1.213 | − | 1.200 | − |
| Two-phase |  |  | 0.485 | 60% | 0.542 | 55% |
| Three-phase |  |  | 0.042 | 96.6% | 0.126 | 90.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Özkayar, G.; Wang, Z.; Lötters, J.; Tichem, M.; Ghatkesar, M.K. Flow Ripple Reduction in Reciprocating Pumps by Multi-Phase Rectification. Sensors 2023, 23, 6967. https://doi.org/10.3390/s23156967
Özkayar G, Wang Z, Lötters J, Tichem M, Ghatkesar MK. Flow Ripple Reduction in Reciprocating Pumps by Multi-Phase Rectification. Sensors. 2023; 23(15):6967. https://doi.org/10.3390/s23156967
Chicago/Turabian StyleÖzkayar, Gürhan, Zhilin Wang, Joost Lötters, Marcel Tichem, and Murali Krishna Ghatkesar. 2023. "Flow Ripple Reduction in Reciprocating Pumps by Multi-Phase Rectification" Sensors 23, no. 15: 6967. https://doi.org/10.3390/s23156967
APA StyleÖzkayar, G., Wang, Z., Lötters, J., Tichem, M., & Ghatkesar, M. K. (2023). Flow Ripple Reduction in Reciprocating Pumps by Multi-Phase Rectification. Sensors, 23(15), 6967. https://doi.org/10.3390/s23156967