
Critical Examination of Distance-Gain-Size (DGS) Diagrams of Ultrasonic NDE with Sound Field Calculations


Abstract
:1. Introduction
2. Sound Field Calculations
2.1. Results of Previous Studies
2.2. Torikai Formulation
2.3. Sound Field Simulation Using Zemanek Model
2.4. Comparison of Two Calculation Results
3. DGS Diagrams
3.1. Forward and Backward Diffraction
3.2. Echo Amplitude Determination
4. Discussion
5. Summary and Conclusions
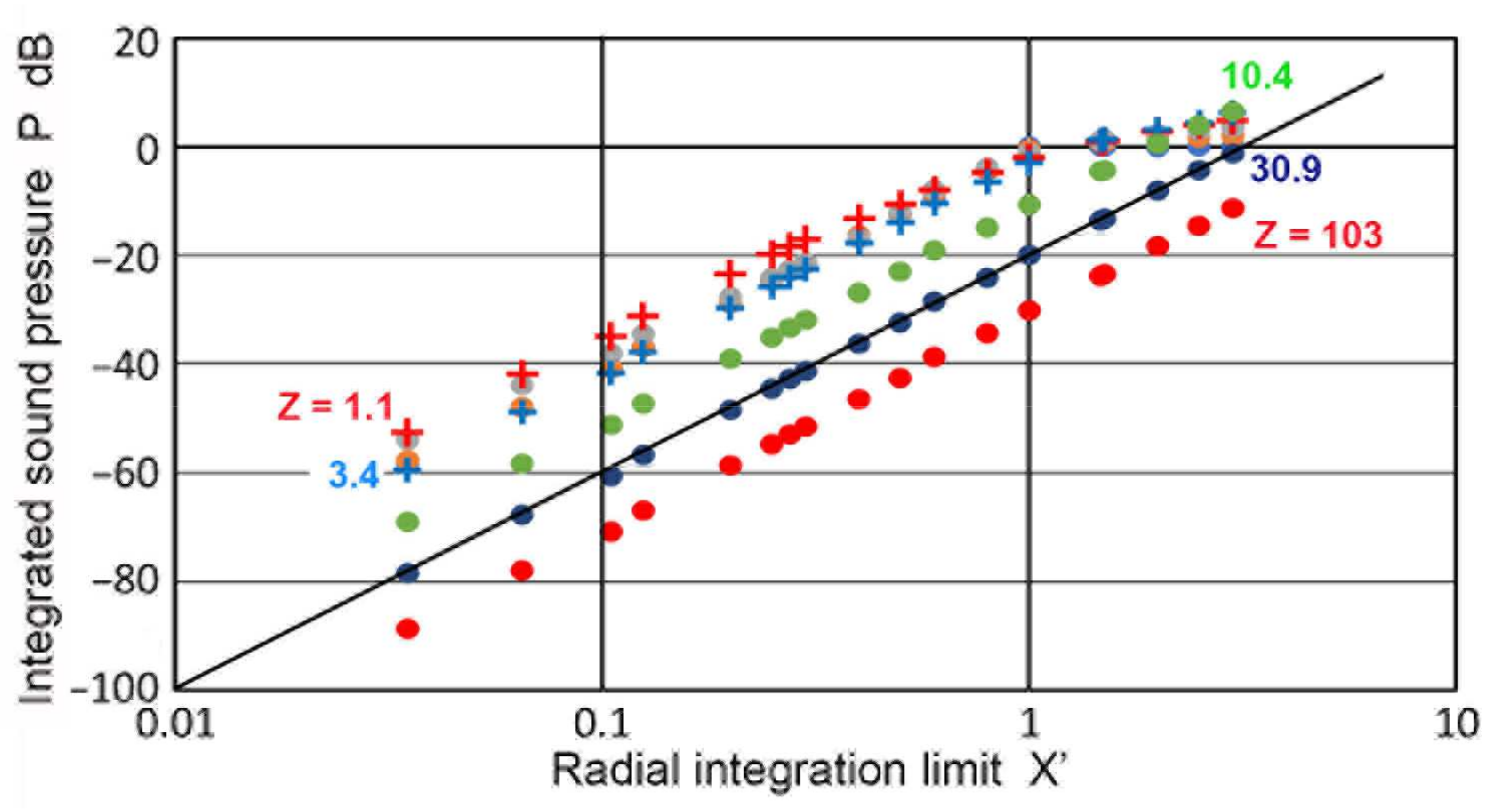
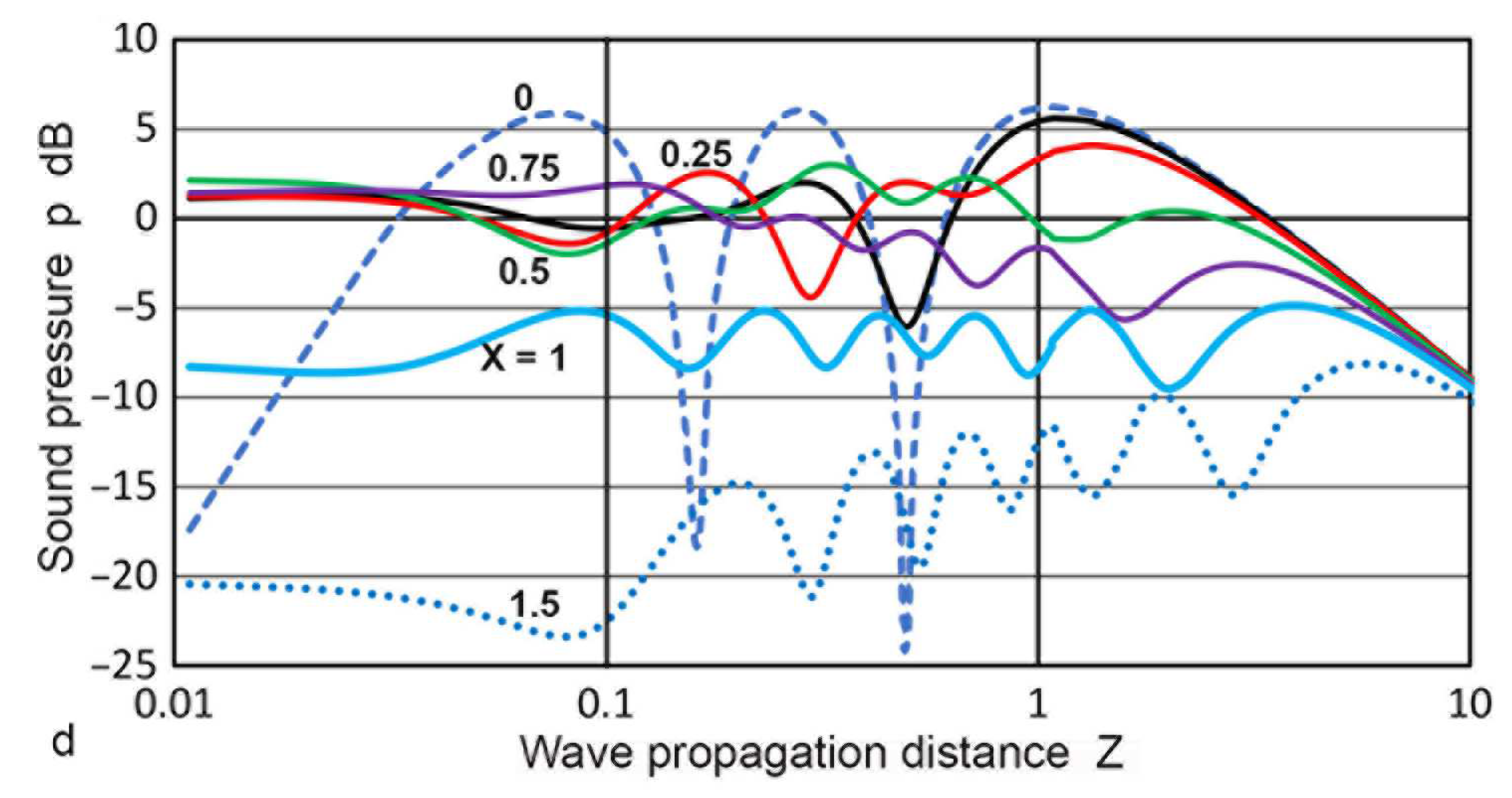
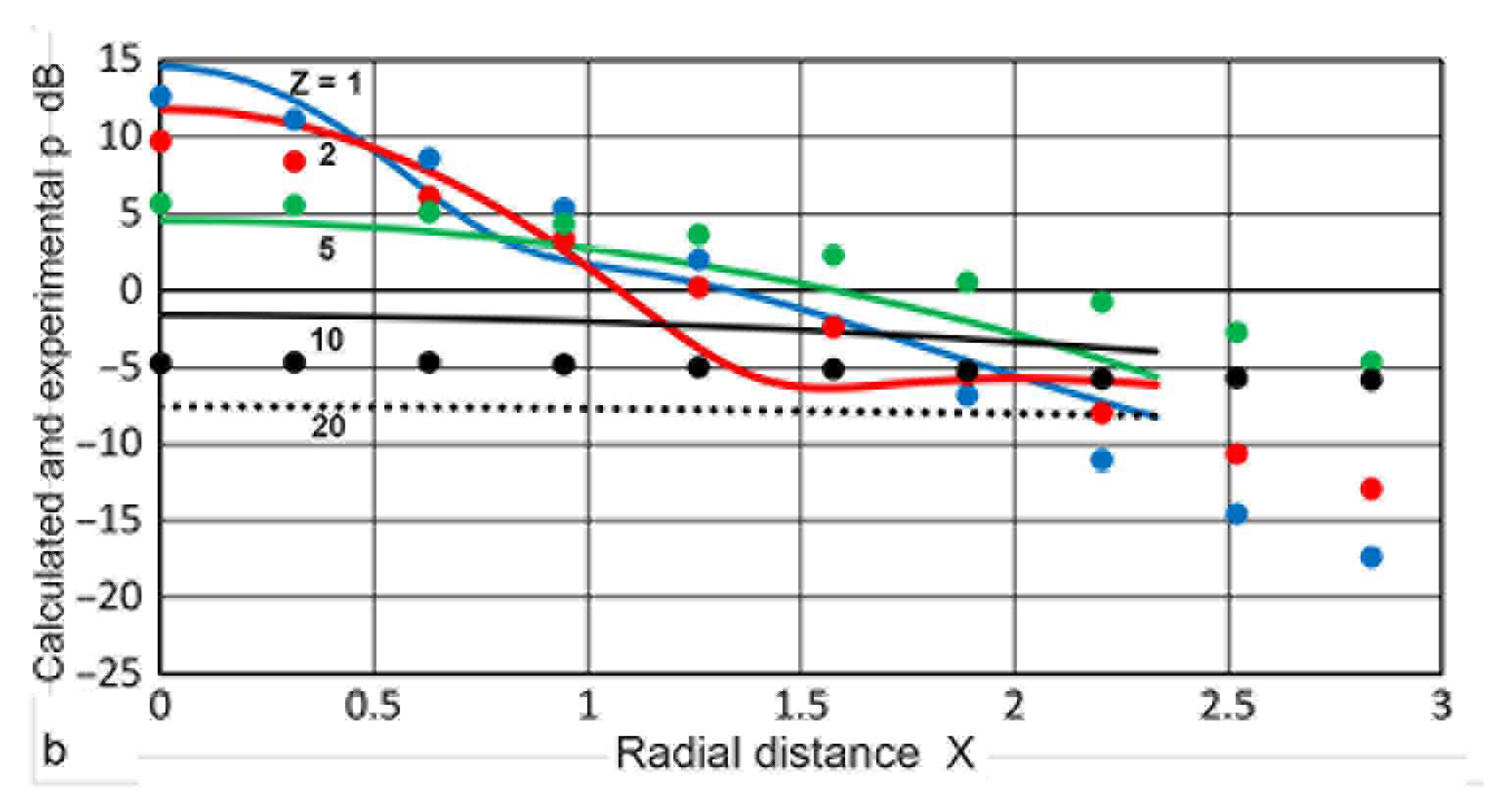
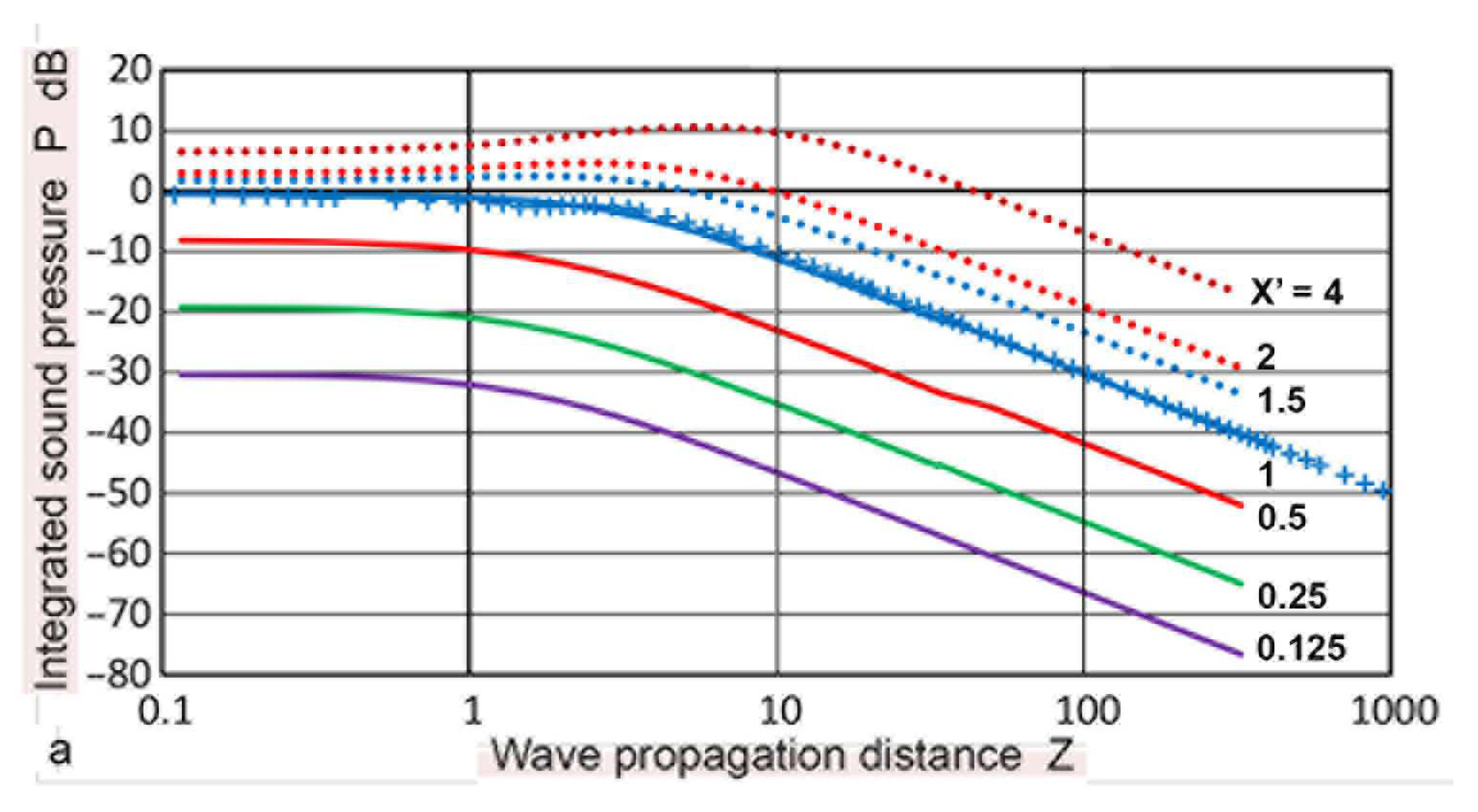
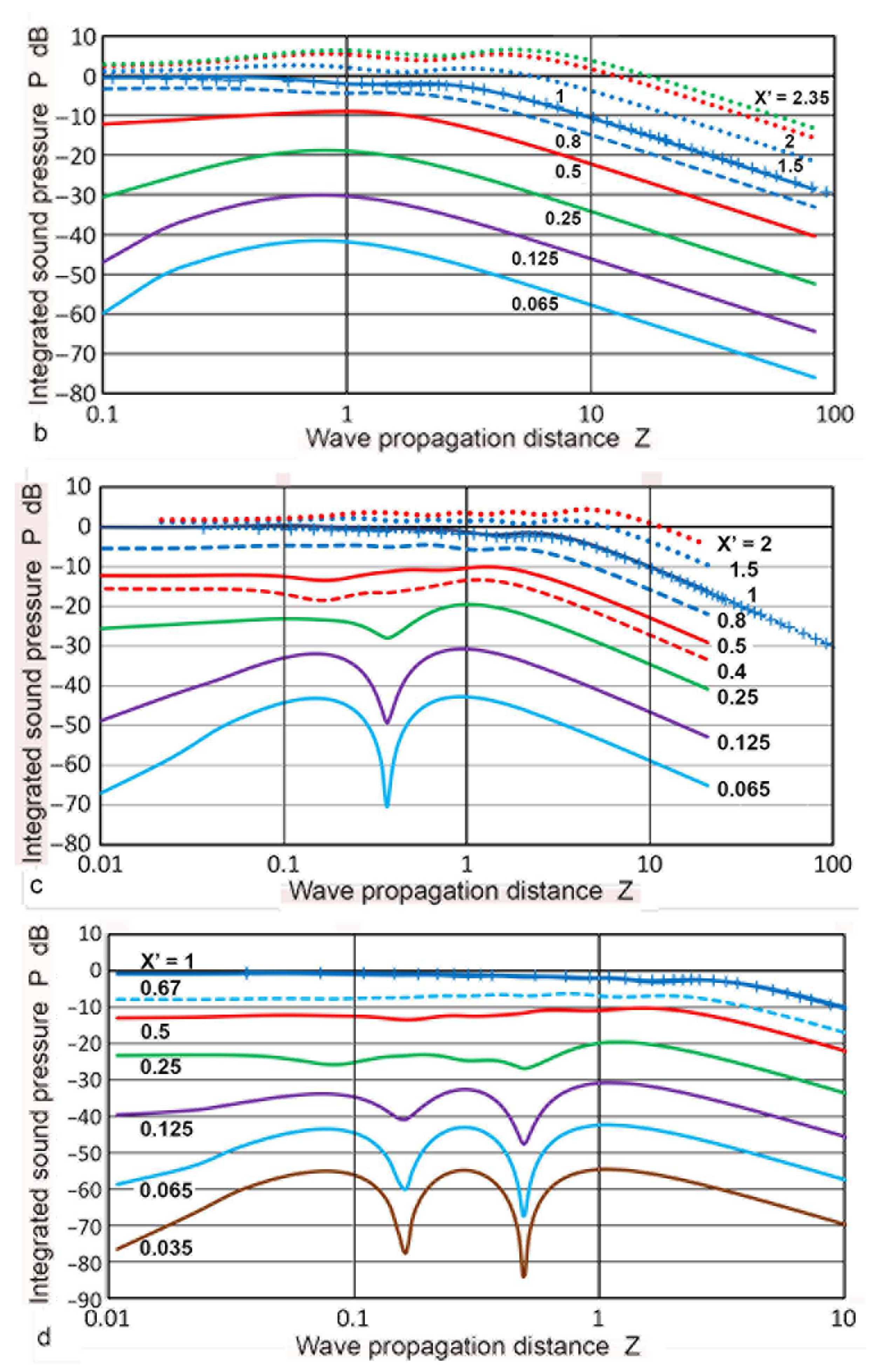
- Using the Torikai equations derived from the Lommel formulas and a MATLAB code based on the Zemanek model, the sound fields of a circular ultrasonic transmitter were determined quantitatively, producing a tabular listing of the sound pressure, p, vs. radial position, X, and propagation distance, Z. These were also integrated section-wise to the radial integration limit, X′, providing integrated sound pressures, P.
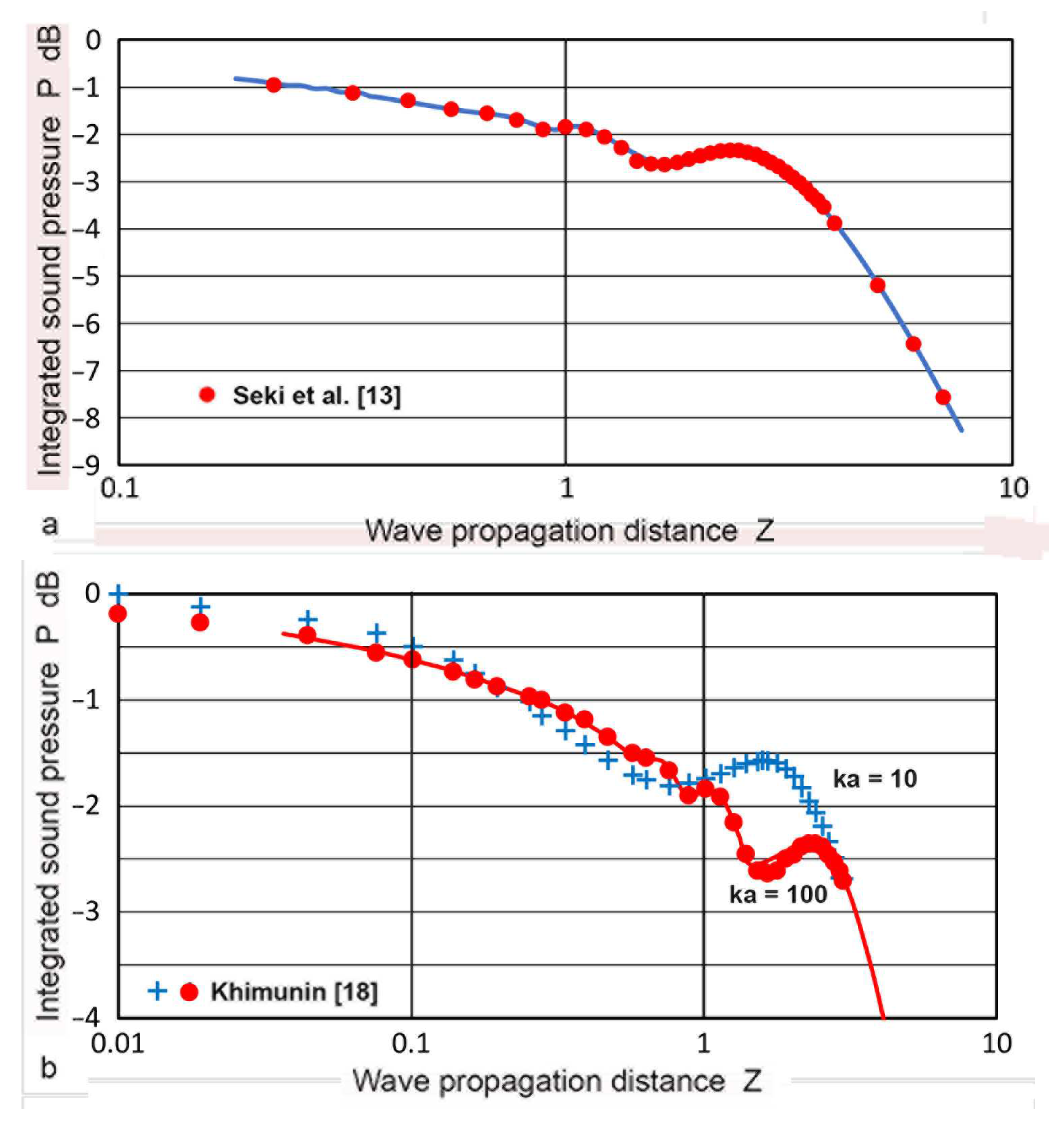
- Between the two methods, general trends of the variation in p and P with respect to X, X′, and Z matched well in the far-field region, but their behaviors in the near-field region agreed only approximately. These were dependent on the calculation method as well as the ratio of the transmitter radius to wavelength, aT/λ. The Torikai equations were independent of aT/λ, while the Zemanek model yielded aT/λ-dependent p and P results.
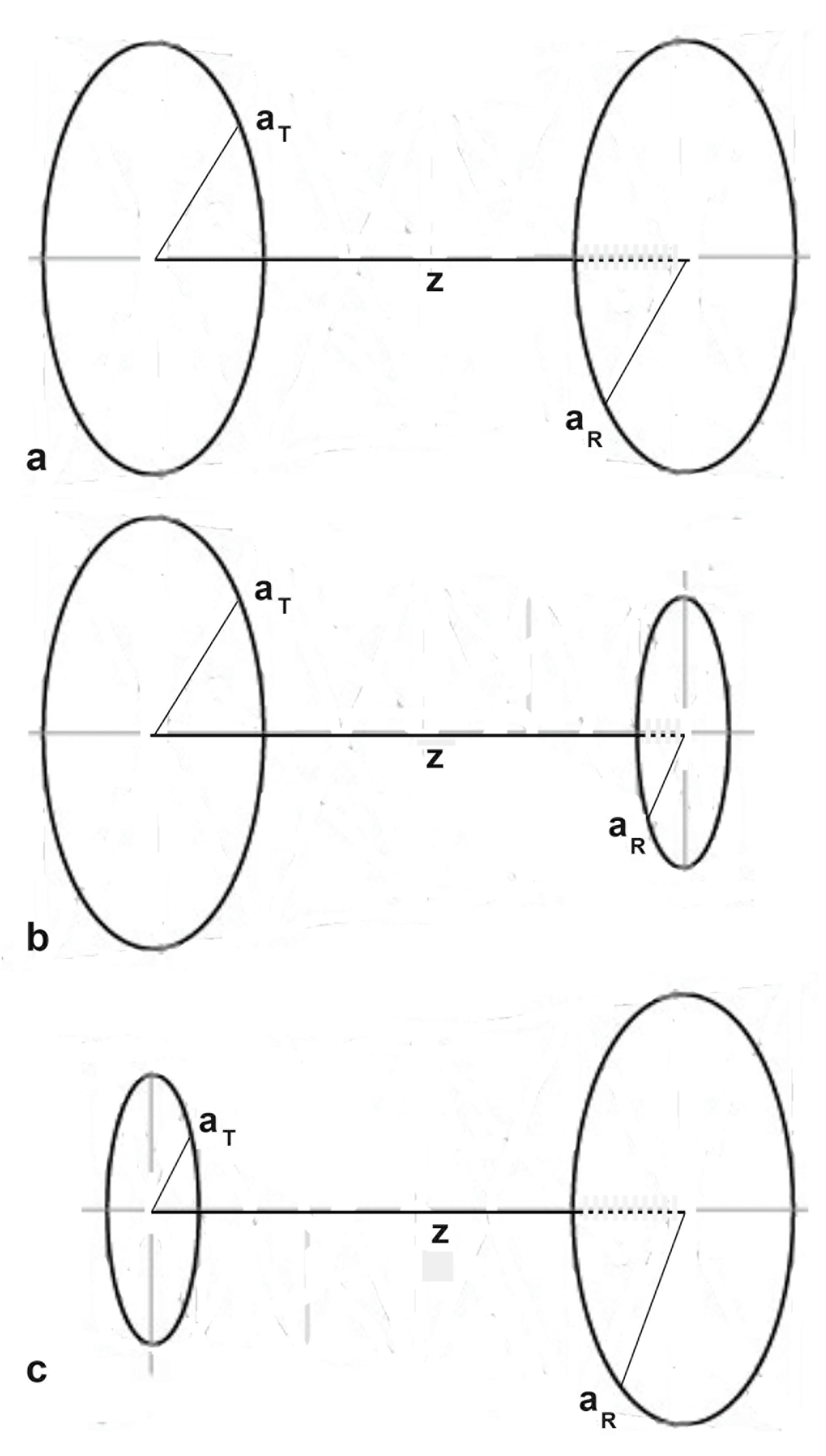
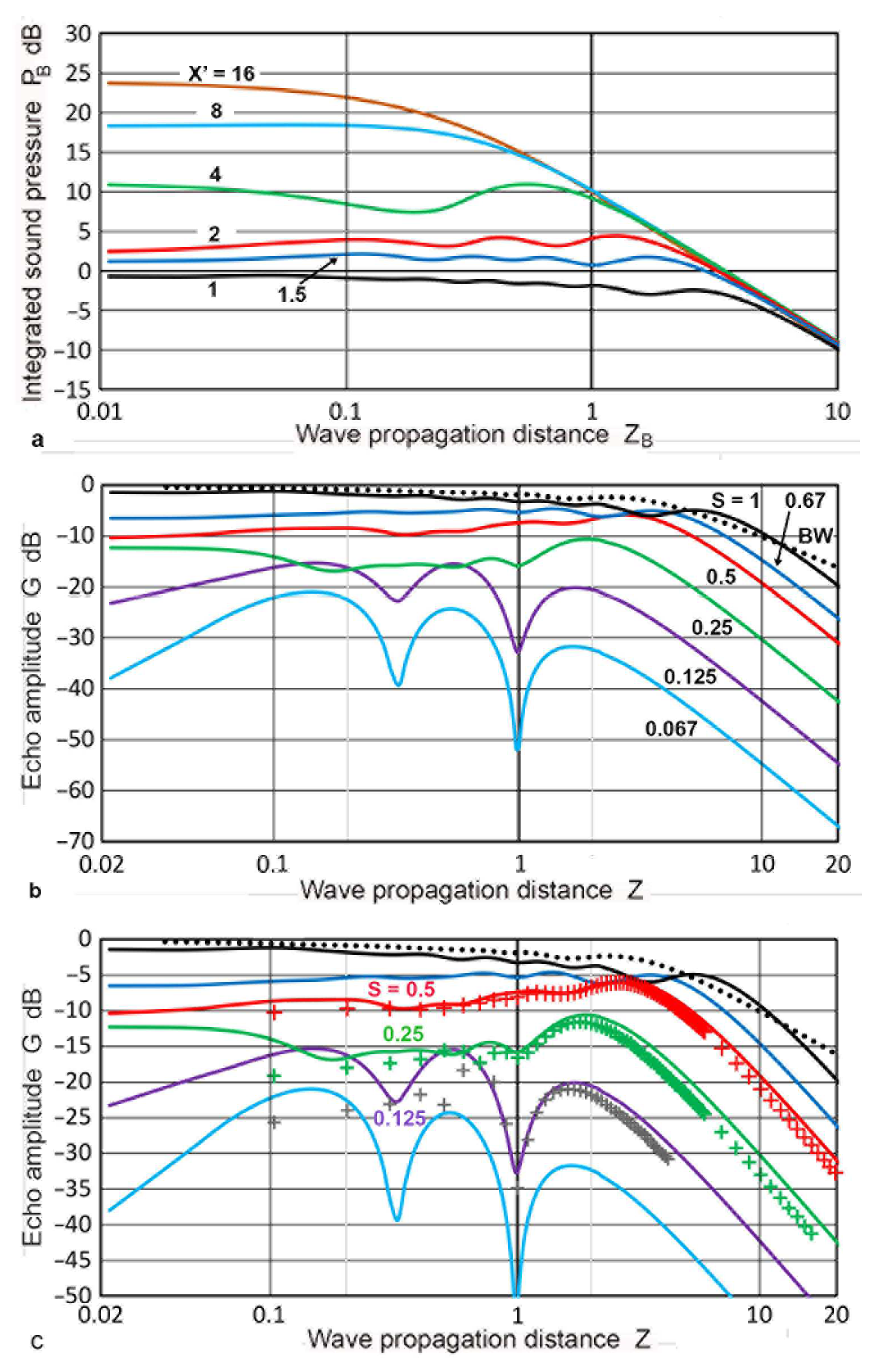
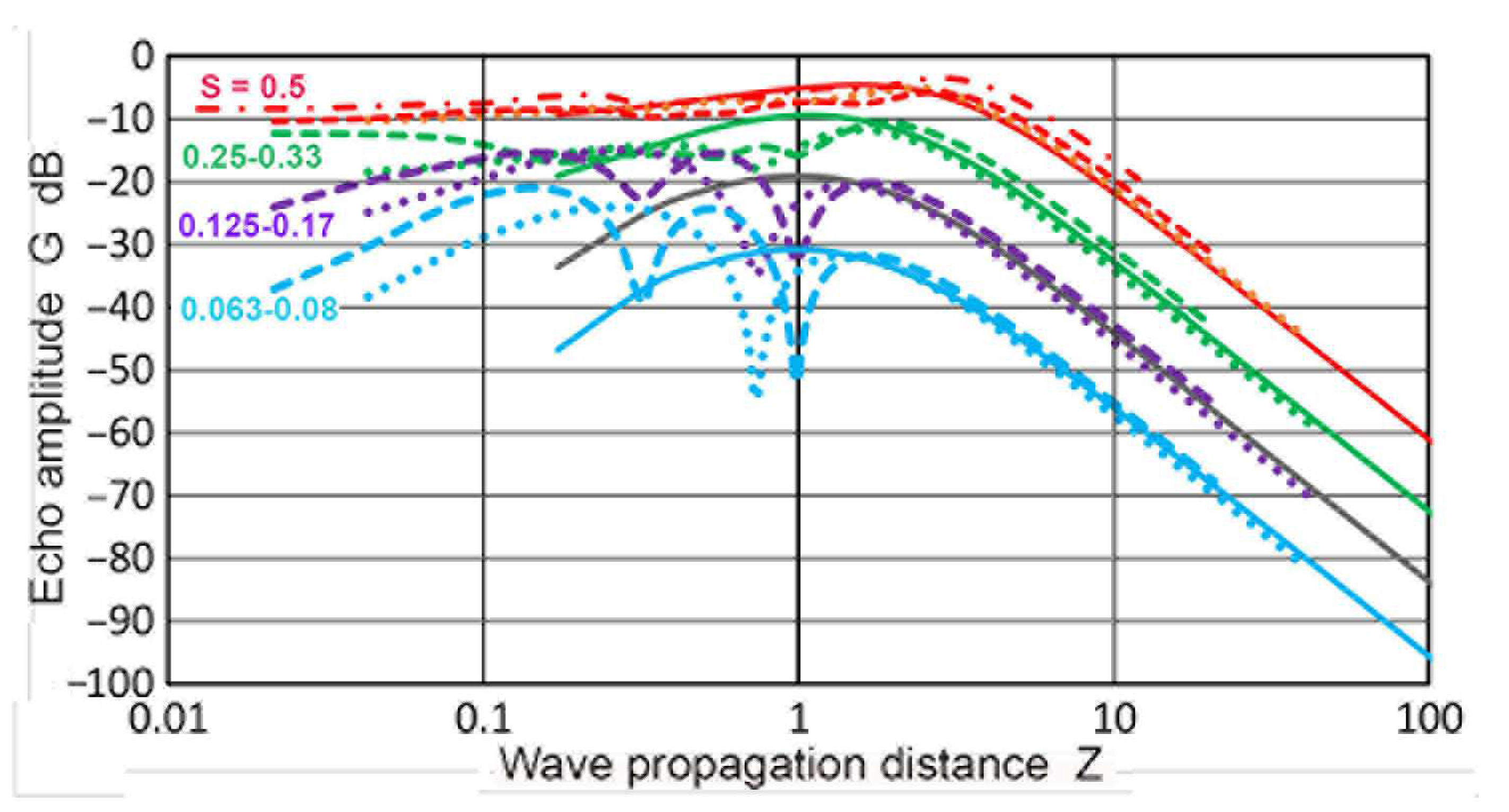
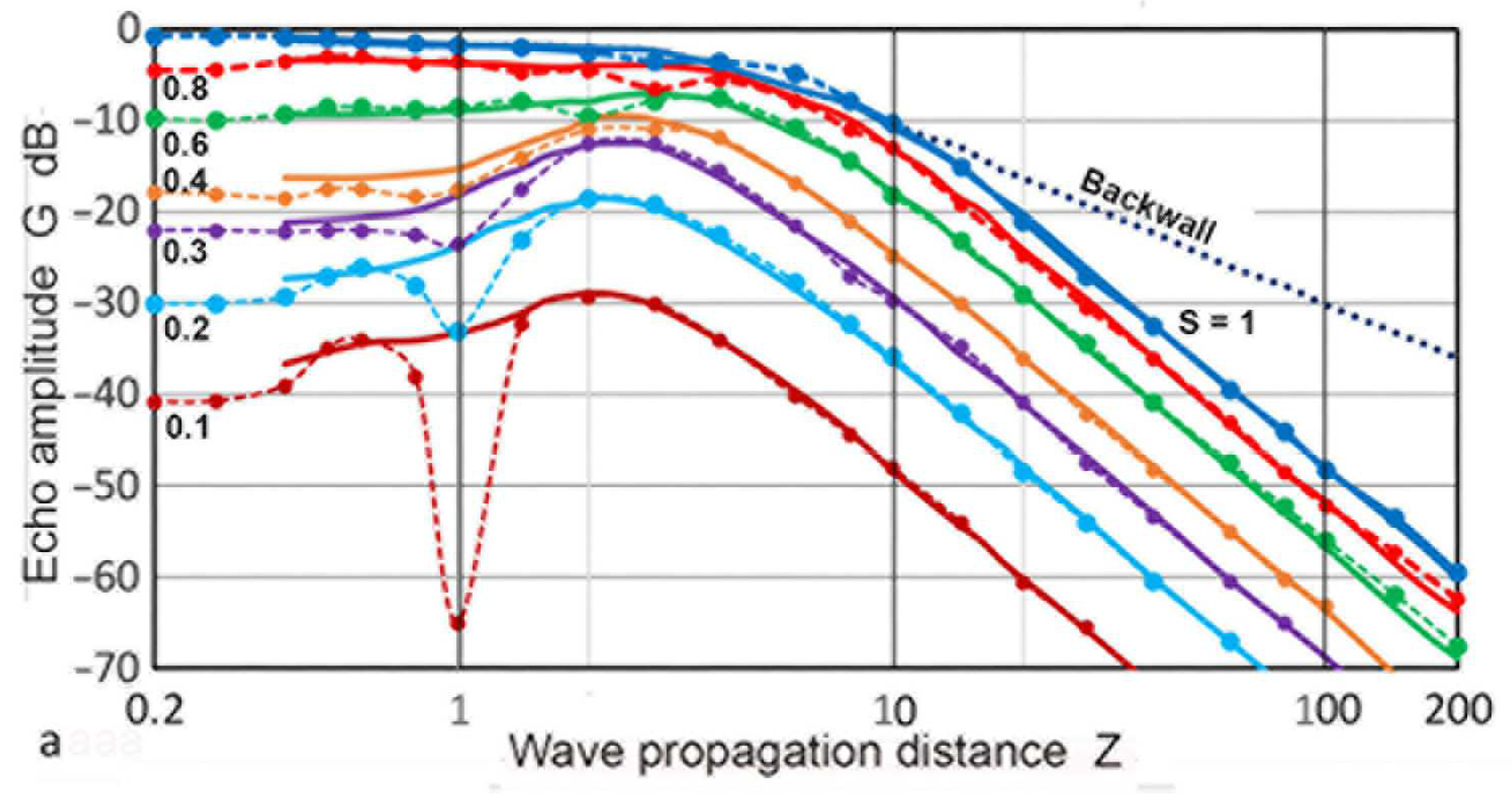
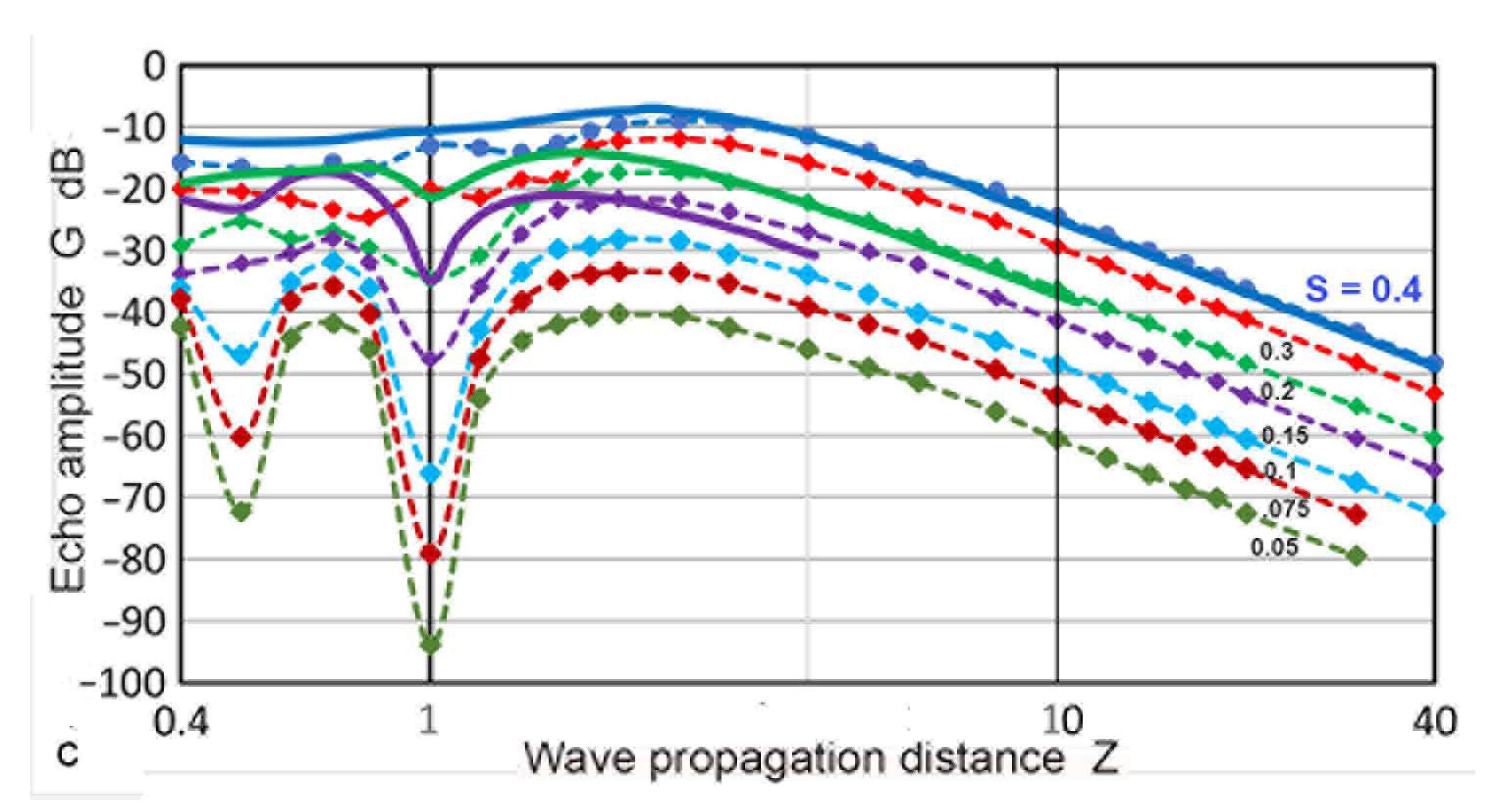
- In order to determine the DGS diagrams based on the two-way diffraction method, datasets of P vs. Z were separately obtained for the forward and backward paths since the backward path has a vastly different near-field distance. These two were combined on the basis of the propagation distance, and DGS diagrams were obtained. Six such DGS diagrams were presented and discussed. Similar to the sound pressure results, the DGS diagrams had general accordance, but differed in the near-field region.
- The Torikai-based DGS diagram agreed well with the Zemanek-based one that used a 19 mm transmitter radius. Both showed a sharp dip at Z = 1 for smaller reflector sizes. The Zemanek-based DGS diagram for the smaller transmitter radii had a corresponding dip at lower Z, and eventually no dip. Thus, it is evident that multiple DGS diagrams need to be prepared to accommodate various ultrasonic test conditions.
- Using the knowledge on the sound fields of a circular ultrasonic transducer, the published DGS diagrams were examined. The Mundry DGS diagram was found to agree with an approximate Torikai-based quasi-DGS diagram, which simplified the backward diffraction, assuming an equal-sized transmitter–receiver pair. This agreement also implied that Mundry utilized the Lommel formulas in his sound field calculations because of the matching position of the dips as well as the independence on aT/λ. The general DGS diagram was found to agree with the Mundry DGS diagram, except for the dips that were smoothed out. This simplified diagram cannot be treated as science-based since no justification had been presented for the curve alteration. The Kimura DGS diagrams matched the Torikai diagram reasonably well since Kimura also used the Torikai equations. However, arbitrary procedures were included, making one type of the Kimura diagram inappropriate.
- Sound field calculations can be used to obtain DGS diagrams using a two-way diffraction method and proper accounting of the backward diffraction paths. Details of this construction method are presented. Two methods, Torikai and Zemanek, were used to obtain the sound fields. After a comparison of the results, the Zemanek-based calculations were found to properly account for the transmitter sizes. The ranges of the variables were still limited, and enlarged computations are needed to complete practical DGS diagrams. Other calculation methods by Stepanishen, Hasegawa et al. and Mast [23,24,25,26] should also be explored.
- Three published DGS diagrams were evaluated and found to contain undisclosed approximations, making them unreliable for their general use. The general DGS diagram from ISO 16811 had the most technically serious simplifications by arbitrarily removing large variations in the Mundry DGS curves, from which the diagram was apparently constructed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Krautkramer, J.; Krautkramer, H. Ultrasonic Testing of Materials, 4th ed.; Springer: Berlin, Germany, 1990; 677p. [Google Scholar]
- Moore, P.O. (Ed.) Nondestructive Testing Handbook, 3rd ed.; Ultrasonic Testing; American Society of Nondestructive Testing (ASNT): Columbus, OH, USA, 2007; Volume 7, 600p. [Google Scholar]
- Ensminger, D.; Bond, D.J. Ultrasonics, Fundamentals, Technologies, and Applications, 3rd ed.; Taylor & Francis Group: Boca Raton, FL, USA, 2011; 704p. [Google Scholar]
- Schmerr, L.W., Jr. Fundamentals of Ultrasonic Nondestructive Evaluation, A Modeling Approach, 2nd ed.; Springer: New York, NY, USA, 2016; 758p. [Google Scholar]
- Kleinert, W. Defect Sizing Using Non-Destructive Ultrasonic Testing, Applying Bandwidth-Dependent DAC and DGS Curves; Springer: Berlin, Germany, 2016; 118p. [Google Scholar]
- Lord Rayleigh, J.W.S. Theory of Sound; Secs. 278 and 302, Macmillan: London, UK, 1896; Dover: New York, NY, USA, 1945; Volume 2, pp. 106–109, 162–169. [Google Scholar]
- Lommel, E. Die Beugungserscheinungen einer Kreisrunden Oeffnung und eines Kreisrunden, Schirmchens Theoretisch und Experimentell Bearbeitet, Königlich Bayerische Akademie der Wissenschaften. Mathematisch-Physikalische Klasse; Königlich Bayerische Akademie der Wissenschaften: Munich, Germany, 1886; Volume 15, pp. 229–329. [Google Scholar]
- Gray, A.; Mathews, G.B.; MacRobert, T.M. A Treatise on Bessel Functions and Their Applications to Physics, 2nd ed.; Macmillan: London, UK, 1922; 327p. [Google Scholar]
- Watson, G.N. Theory of Bessel Functions; Cambridge University Press: Cambridge, UK, 1922; 804p. [Google Scholar]
- Schoch, A. Betrachtungen über das Schallfeld einer Kolbenmembran. Akust. Z. 1941, 6, 318–326. [Google Scholar]
- Huntington, H.B.; Emslie, A.G.; Hughes, V.W. Ultrasonic delay lines. I. J. Frankl. Inst. 1948, 245, 1–23. [Google Scholar] [CrossRef]
- Williams, A.O., Jr. The piston source at high frequencies. J. Acoust. Soc. Am. 1951, 23, 1–6. [Google Scholar] [CrossRef]
- Seki, H.; Granato, A.; Truell, R. Diffraction effects in the ultrasonic field of a piston source and their importance in the accurate measurement of attenuation. J. Acoust. Soc. Am. 1956, 28, 230–238. [Google Scholar] [CrossRef]
- Bass, R. Diffraction effects in the ultrasonic field of a piston source. J. Acoust. Soc. Am. 1958, 30, 602–605. [Google Scholar] [CrossRef]
- Torikai, Y. Sound Fields in the Fresnel Zone, Choonpa Gijutsu Binran (Handbook on Ultrasound Engineering); Sec., V.1; Saneyoshi, J., Kikuchi, Y., Nomoto, O., Eds.; Nikkan Kogyo Shinbun: Tokyo, Japan, 1966; pp. 1399–1418. [Google Scholar]
- Torikai, Y. On the ultrasonic field produced by a circular piston source. Seisan-Kenkyu 1969, 21, 47–54. [Google Scholar]
- Yamada, K.; Fujii, Y. Acoustic response of a circular receiver to a circular source of different radius. J. Acoust. Soc. Am. 1966, 40, 1193–1194. [Google Scholar] [CrossRef]
- Stepanishen, P.R. The time-dependent force and radiation impedance on a piston in a rigid infinite planar baffle. J. Acoust. Soc. Am. 1970, 49, 841–849. [Google Scholar] [CrossRef]
- Zemanek, J. Beam behavior within the nearfield of a vibrating piston. J. Acoust. Soc. Am. 1971, 49, 181–191. [Google Scholar] [CrossRef]
- Khimunin, A.S. Numerical calculation of the diffraction correction for the precision measurement of ultrasound absorption. Acustica 1972, 27, 173–181. [Google Scholar]
- Benson, G.C.; Kiyohara, O. Tabulation of some integral functions describing diffraction effects in the ultrasonic field of a circular piston source. J. Acoust. Soc. Am. 1974, 55, 184–185. [Google Scholar] [CrossRef]
- Rogers, P.H.; Van Buren, A.L. An exact expression for the Lommel-diffraction correction integral. J. Acoust. Soc. Am. 1974, 55, 724. [Google Scholar] [CrossRef]
- Stepanishen, P.R. Pulsed transmit/receive response of ultrasonic piezoelectric transducers. J. Acoust. Soc. Am. 1981, 69, 1815–1827. [Google Scholar] [CrossRef]
- Hasegawa, T.; Inoue, N.; Matsuzawa, K. A new rigorous expansion for the velocity potential of a circular piston source. J. Acoust. Soc. Am. 1983, 74, 1044–1047. [Google Scholar] [CrossRef]
- Hasegawa, T.; Inoue, N.; Matsuzawa, K. Fresnel diffraction: Some extensions of the theory. J. Acoust. Soc. Am. 1984, 75, 1048–1051. [Google Scholar] [CrossRef]
- Mast, T.D. Simplified expansions for radiation from a baffled circular piston. J. Acoust. Soc. Am. 2005, 116, 3457–3464. [Google Scholar] [CrossRef]
- Daly, C.J.; Rao, N.A.H.K. Scalar Diffraction from a Circular Aperture; Springer: New York, NY, USA, 2000; 175p. [Google Scholar]
- Gasparini, R.T.; Button, V.L.S.N. Development of a MATLAB environment software for simulation of ultrasonic field. Rev. Ing. Bioméd. 2013, 7, 57–67, MATLAB code listing can be found in Appendix A, Programas em MATLAB para simulação do campo ultrassônico (FSIM), Gasparini, R.T. Master’s Thesis, Development of a MATLAB Environment Software for Simulation of Ultrasonic Field. University of Campinas, Campinas, Brazil, 2012; 107p. [Google Scholar]
- Kohout, B.; Palacios, L.; Dapp, R.; Zapf, M.; Ruiter, N.V. Sound field simulation tool for arbitrary rectangular transducer array matrices. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 568–571. [Google Scholar] [CrossRef]
- Field II Simulation Program. Available online: https://field-ii.dk//main.html (accessed on 20 March 2023).
- Papadakis, E.P. Ultrasonic velocity and attenuation: Measurement methods with scientific and industrial applications. In Physical Acoustics; Academic Press: New York, NY, USA, 1976; Volume XII, pp. 277–375. [Google Scholar]
- Treiber, M.; Kim, J.Y.; Jacobs, L.J. Correction for partial reflection in ultrasonic attenuation measurements using contact transducers. J. Acoust. Soc. Am. 2009, 125, 2946–2953. [Google Scholar] [CrossRef] [PubMed]
- Ono, K. A comprehensive report on ultrasonic attenuation of engineering materials, including metals, ceramics, polymers, fiber-reinforced composites, wood, and rocks. Appl. Sci. 2020, 10, 2230. [Google Scholar] [CrossRef] [Green Version]
- Ono, K. Dynamic viscosity and transverse ultrasonic attenuation of engineering materials. Appl. Sci. 2020, 10, 5265. [Google Scholar] [CrossRef]
- Ono, K. Ultrasonic attenuation of ceramic and inorganic materials. Appl. Sci. 2022, 12, 13026. [Google Scholar] [CrossRef]
- Krautkramer, J. Die Messung der Ultraschall-Schwächung nach dem Echolotverfahren. Giesserei Tech. Wiss. Beih. 1958, 20, 1067–1075. [Google Scholar]
- Krautkramer, J. Determination of the size of defects by the ultrasonic impulse echo method. Br. J. Appl. Phys. 1959, 10, 240–245. [Google Scholar] [CrossRef]
- Mundry, E.; Wüstenberg, H. Ultrasonic defect-size determination with double probe and single-probe techniques. In Proceedings of the 5th International Conference on Non Destructive Testing, Montreal, QC, Canada, 21 May 1967; pp. 58–62. [Google Scholar]
- Mundry, E. Defect evaluation by ultrasonics, Some results of work in progress at the Bundesanstalt für Materialprüfung. Non-Destr. Test. 1972, 5, 290–297. [Google Scholar] [CrossRef]
- Kimura, K. Approximate calculation of flaw echo height in ultrasonic non-destructive testing. Trans. Nat. Res. Inst. Met. 1961, 4, 115–121. [Google Scholar]
- Kimura, K. Calculation of the AVG diagram for the ultrasonic normal probe. Trans. Nat. Res. Inst. Met. 1980, 22, 29–34. [Google Scholar]
- Schmerr, L.W.; Sedov, A. The flat-bottom hole: An ultrasonic scattering model. Res. Nondestruct. Eval. 1989, 1, 181–196. [Google Scholar] [CrossRef]
- Song, S.J.; Schmerr, L.W.; Sedov, A. DGS diagrams and frequency response curves for a flat-bottom hole: A model-based approach. Res. Nondestruct. Eval. 1991, 3, 201–219. [Google Scholar] [CrossRef]
- Sedov, A.; Schmerr, L.W.; Song, S.-J. Ultrasonic scattering by a flat-bottom hole in immersion testing: An analytical model. J. Acoust. Soc. Am. 1992, 92, 478. [Google Scholar] [CrossRef]
- Wright, J.P. A model to predict the ultrasonic echo responses of small targets in solids. J. Acoust. Soc. Am. 1993, 94, 514–526. [Google Scholar] [CrossRef]
- Boehm, R.; Erhard, A.; Vierke, J. Anwendung von Modellen zur Echohöhenbewertung von Prüfköpfen mit ungewöhnlicher Schwingergeometrie. In DGZfP-Proc. 94; Paper 44; Deutsche Gesellschaft für Zerstörungsfreie Prüfung (DGZfP): Berlin, Germany, 2005; 10p. [Google Scholar]
- Mahaut, S.; Chatillon, S.; Darmon, M.; Leymarie, N.; Raillon, R.; Calmon, P. An overview of ultrasonic beam propagation and flaw scattering models in the CIVA software. In Review of Progress in Quantitative Nondestructive Evaluation; AIP Conference Proceedings; American Institute of Physics: Kingston, LI, USA, 2010; Volume 1211, pp. 2133–2140. [Google Scholar] [CrossRef]
- Kleinert, W.; Oberdörfer, Y. Calculated bandwidth dependent DGS and DAC curves for phased array sizing. In Proceedings of the 11th ECNDT Prag, Prague, Czech Republic, 6–10 October 2014; 9p. Available online: http://www.ndt.net/events/ECNDT2014/app/content/Paper/165_Kleinert.pdf (accessed on 3 May 2023).
- ISO16811:2012(E); Non-Destructive Testing—Ultrasonic Testing—Sensitivity and Range Setting. International Organization for Standardization: Geneva, Switzerland, 2012; 38p.
- ASTM A388-19; Standard Practice for Ultrasonic Examination of Steel Forgings. ASTM International: West Conshohocken, PA, USA, 2019; 9p.
- Kinsler, L.E.; Frey, A.R.; Coppens, A.B.; Sanders, J.B. Fundamentals of Acoustics, 3rd ed.; Wiley: New York, NY, USA, 1982; 480p. [Google Scholar]
- Ono, K.; Cho, H.; Vallen, H.; M’Closkey, R.T. Transmission sensitivities of contact ultrasonic transducers and their applications. Sensors 2021, 21, 4396. [Google Scholar] [CrossRef] [PubMed]
- Thompson, R.B.; Gray, T.L. A model relating ultrasonic scattering measurements through liquid–solid interfaces to unbounded medium scattering amplitudes. J. Acoust. Soc. Am. 1983, 74, 1279. [Google Scholar] [CrossRef]
- San Emeterio, J.L.; Ullate, L.G. Diffraction impulse response of rectangular piston. J. Acoust. Soc. Am. 1992, 92, 651–662. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forward Path | Backward Path | |
|---|---|---|
| Transmitter size (Tx) | aT | aT’ (=aR) |
| Receiver size (Rx) | aR (=aT S) | aR’ (=aT) |
| Ratio of Rx to Tx | S = aR/aT | SB = 1/S |
| Near-field distance | N = aT2/λ | NB = N S2 |
| Integrated sound field | P(X′,Z) | PB(X′,ZB) |
| Wave propagation distance | Z | ZB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ono, K.; Su, H. Critical Examination of Distance-Gain-Size (DGS) Diagrams of Ultrasonic NDE with Sound Field Calculations. Sensors 2023, 23, 7004. https://doi.org/10.3390/s23157004
Ono K, Su H. Critical Examination of Distance-Gain-Size (DGS) Diagrams of Ultrasonic NDE with Sound Field Calculations. Sensors. 2023; 23(15):7004. https://doi.org/10.3390/s23157004
Chicago/Turabian StyleOno, Kanji, and Hang Su. 2023. "Critical Examination of Distance-Gain-Size (DGS) Diagrams of Ultrasonic NDE with Sound Field Calculations" Sensors 23, no. 15: 7004. https://doi.org/10.3390/s23157004
APA StyleOno, K., & Su, H. (2023). Critical Examination of Distance-Gain-Size (DGS) Diagrams of Ultrasonic NDE with Sound Field Calculations. Sensors, 23(15), 7004. https://doi.org/10.3390/s23157004