


The 0-3 Lead Zirconate-Titanate (PZT)/Polyvinyl-Butyral (PVB) Composite for Tactile Sensing

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
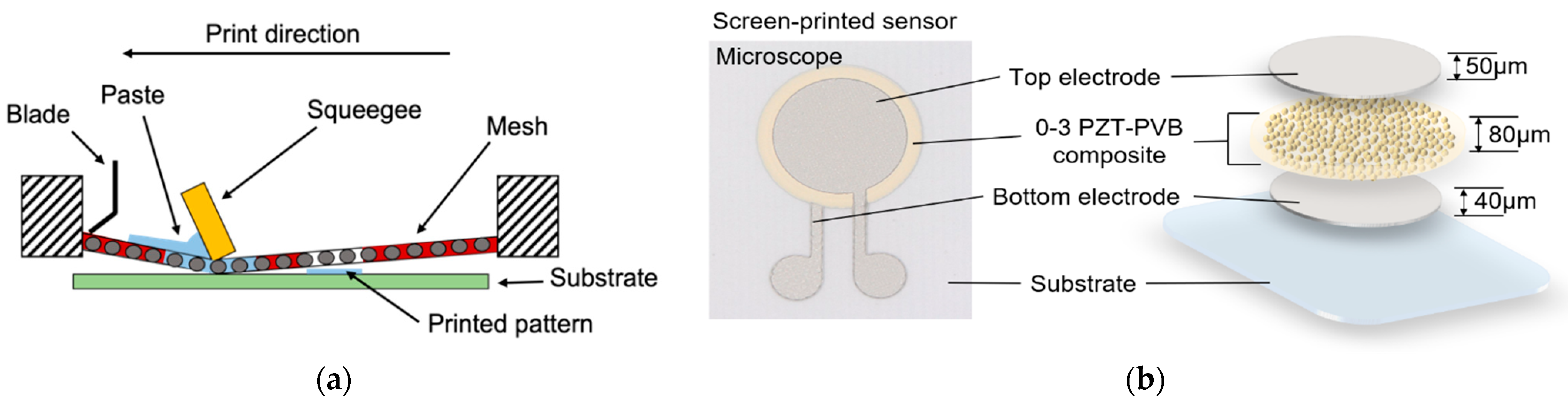
2.2. Fabrication of Tactile Sensor
3. Results and Discussion
3.1. Polarization–Electric Field (P–E) Hysteresis Loop
3.2. Piezoelectric Properties (d33, g33)
3.3. Impact Force Test
3.4. Tactile Sensing
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Conflicts of Interest
References
- Sappati, K.K.; Bhadra, S. 0-3 barium titanate-PDMS flexible film for tactile sensing. Proceeding of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Choy, J.Y.; Jo, E.B.; Yim, C.J.; Youi, H.K.; Hwang, J.H.; Lee, J.H.; Kim, H.S. Improvement in Strain Sensor Stability by Adapting the Metal Contact Layer. Sensors 2022, 22, 630. [Google Scholar] [CrossRef] [PubMed]
- Yim, C.J.; Choy, J.Y.; Youi, H.K.; Hwang, J.H.; Jo, E.B.; Lee, J.H.; Kim, H.S. Dilute Polymerization of Aniline on PDMS Substrate via Surface Modification Using (3-Aminopropyl) Triethoxysilane for Stretchable Strain Sensor. Sensors 2022, 22, 2741. [Google Scholar] [CrossRef] [PubMed]
- Senthil Kumar, K.; Chen, P.Y.; Ren, H. A review of printable flexible and stretchable tactile sensors. Research 2019, 2019, 3018568. [Google Scholar] [PubMed]
- Takahashi, H.; Numamoto, Y.; Tani, J.; Matsuta, K.; Qiu, J.; Tsurekawa, S. Lead-free barium titanate ceramics with large piezoelectric constant fabricated by microwave sintering. Jpn. J. Appl. Phys. 2005, 45, L30–L32. [Google Scholar] [CrossRef]
- James, N.K.; Van Den Ende, D.; Lafont, U.; van der Zwaag, S.; Groen, W.A. Piezoelectric and mechanical properties of structured PZT–epoxy composites. J. Mater. Res. 2013, 28, 635–641. [Google Scholar] [CrossRef]
- Wada, S.; Yako, K.; Kakemoto, H.; Tsurumi, T.; Kiguchi, T. Enhanced piezoelectric properties of barium titanate single crystals with different engineered-domain sizes. J. Appl. Phys. 2005, 98, 014109. [Google Scholar] [CrossRef]
- Venkatragavaraj, E.; Satish, B.; Vinod, P.R.; Vijaya, M.S. Piezoelectric properties of ferroelectric PZT-polymer composites. J. Phys. D Appl. Phys. 2001, 34, 487–492. [Google Scholar] [CrossRef]
- Waller, D.; Safari, A. Corona poling of PZT ceramics and flexible piezoelectric composites. Ferroelectrics 1988, 87, 189–195. [Google Scholar] [CrossRef]
- Kitayama, T.; Sugawara, S. Piezoelectric and pyroelectric properties of polymer- ferroelectric composites. In Professional Report Gr, CPM72-17; Institution Electrical and Computer Engineering: Tokyo, Japan, 1972. [Google Scholar]
- Newnham, R.E.; Skinner, D.P.; Cross, L.E. Connectivity and piezoelectric-pyroelectric composites. Mater. Res. Bull. 1978, 13, 525–536. [Google Scholar] [CrossRef]
- Habib, M.; Lantgios, I.; Hornbostel, K. A review of ceramic, polymer and composite piezoelectric materials. J. Phys. D Appl. Phys. 2022, 55, 423002. [Google Scholar] [CrossRef]
- Mishra, S.; Unnikrishnan, L.; Nayak, S.K.; Mohanty, S. Advances in piezoelectric polymer composites for energy harvesting applications: A systematic review. Macromol. Mater. Eng. 2019, 304, 1800463. [Google Scholar] [CrossRef]
- Carvalho, E.M.O.; Fernandes, L.; Costa, C.M.S.; Lanceros-Méndez, S. Encyclopedia of Materials: Composites; Elsevier Science: Amsterdam, The Netherlands, 2021; pp. 473–486. ISBN 978-0-12-819731-8. [Google Scholar]
- Lee, H.J.; Zhang, S. Design of low-loss 1-3 piezoelectric composites for high-power transducer applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2012, 59, 1969–1975. [Google Scholar] [PubMed]
- Xie, Y.; Liu, Y.; Liu, J.; Wang, L.; Liu, W.; Soon, B.W.; Cai, Y.; Sun, C. Tunable Electromechanical Coupling Coefficient of a Laterally Excited Bulk Wave Resonator with Composite Piezoelectric Film. Micromachines 2022, 13, 641. [Google Scholar] [CrossRef] [PubMed]
- Sappati, K.K.; Bhadra, S. Flexible piezoelectric 0–3 PZT-PDMS thin film for tactile sensing. IEEE Sens. J. 2020, 20, 4610–4617. [Google Scholar] [CrossRef]
- Babu, I.; Van Den Ende, D.A. Processing and characterization of piezoelectric 0-3 PZT/LCT/PA composites. J. Phys. D Appl. Phys. 2010, 43, 425402. [Google Scholar] [CrossRef]
- Lahtinen, R.; Muukkonen, T.; Koskinen, J.; Hannula, S.P.; Heczko, O. A piezopaint-based sensor for monitoring structure dynamics. Smart Mater. Struct. 2007, 16, 2571. [Google Scholar] [CrossRef]
- PLoSs, B.; Krause, M. Optimized pyroelectric properties of 0-3 composites of PZT particles in polyurethane doped with lithium perchlorate. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2007, 54, 2479–2481. [Google Scholar] [CrossRef]
- Fang, X.; He, J.; Zhang, Y. Preparation and Characterization of Large-Area and Flexible Lead Zirconate Titanate/Polyvinyl-Butyral/Additives Composite Films for Piezoelectric Sensor Application. Sens. Mater. 2016, 28, 681–688. [Google Scholar]
- Terziyan, T.V.; Safronov, A.P.; Beketov, I.V.; Medvedev, A.I.; Armas, S.F.; Kurlyandskaya, G.V. Adhesive and magnetic properties of polyvinyl butyral composites with embedded metallic nanoparticles. Sensors 2021, 21, 8311. [Google Scholar] [CrossRef]
- Takahashi, S. Effects of impurity doping in lead zirconate-titanate ceramics. Ferroelectrics 1982, 41, 143–156. [Google Scholar] [CrossRef]
- Morozov, M.I.; Damjanovic, D. Charge migration in Pb (Zr, Ti) O3 ceramics and its relation to ageing, hardening, and softening. J. Appl. Phys. 2010, 107, 034106. [Google Scholar] [CrossRef] [Green Version]
- Fries, R.; Moulson, A.J. Fabrication and properties of an anisotropic PZT/polymer 0–3 composite. J. Mater. Sci. Mater. Electron. 1994, 5, 238–243. [Google Scholar] [CrossRef]
- Dong, L.; Xiong, C.; Quan, H.; Zhao, G. Polyvinyl-butyral/lead zirconate titanates composites with high dielectric constant and low dielectric loss. Scr. Mater. 2006, 55, 835–837. [Google Scholar] [CrossRef]
- Elkjaer, K.; Astafiev, K.; Ringgaard, E.; Zawada, T. Integrated Sensor Arrays based on PiezoPaintTM for SHM Applications. Annu. Conf. PHM Soc. 2013, 5, 1–9. [Google Scholar]
- Dargahi, J.; Najarian, S. Human tactile perception as a standard for artificial tactile sensing—A review. Int. J. Med. Robot. Comput. Assist. Surg. 2004, 1, 23–35. [Google Scholar] [CrossRef] [PubMed]
- PI Piezoelectric Ceramic Products Catalogs. Available online: https://www.piceramic.com/en/knowledge-center/downloads/catalogs-brochures-certificates (accessed on 20 January 2023).
- Kholkin, A.L.; Taylor, D.V.; Setter, N. Poling effect on the piezoelectric properties of lead zirconate titanate thin films. In ISAF 1998. Proceedings of the Eleventh IEEE International Symposium on Applications of Ferroelectrics, Montreux, Switzerland, 24–27 August 1998; IEEE: Piscataway, NJ, USA, 1998; pp. 69–72. [Google Scholar]
- Chan, H.L.W.; Chen, Y.; Choy, C.L. A poling study of PZT/P (VDF-TrFE) copolymer 0-3 composites. Integr. Ferroelectr. 1995, 9, 207–214. [Google Scholar] [CrossRef]
- Damjanovic, D. The Science of Hysteresis; Academic Press: Cambridge, MA, USA, 2006; pp. 337–465. ISBN 0-12-480874-3. [Google Scholar]
- Gowdhaman, P.; Saravanan, R.S.S.; Annamalai, V.; Pandya, H.M. Poling Effect and Temperature on Electrical Behaviour of PZT-Polymer Composites with 0-3 Connectivity. Int. J. Macro Nano Phys. 2016, 1, 1–7. [Google Scholar] [CrossRef]
- Tanaka, H.; Maeda, T.; Narikiyo, H.; Morimoto, T. Mechanical properties of partially stabilized zirconia for dental applications. J. Asian Ceram. Soc. 2019, 7, 460–468. [Google Scholar] [CrossRef]
- Joshi, S.; Hegde, G.M.; Nayak, M.M.; Rajanna, K. A novel piezoelectric thin film impact sensor: Application in non-destructive material discrimination. Sens. Actuators A Phys. 2013, 199, 272–282. [Google Scholar] [CrossRef]
- Hujer, J.; Dančová, P.; Kořínek, T.; Müller, M. Photolithographically Home-Made PVDF Sensor for Cavitation Impact Load Measurement. Processes 2021, 9, 1761. [Google Scholar] [CrossRef]
- Kasi, A.K.; Kasi, J.K.; Uddin, M.; Bokhari, M. Triboelectric nanogenerator as self-powered impact force sensor for falling object. Curr. Appl. Phys. 2020, 20, 137–144. [Google Scholar]
- Larraneta, E.; Lutton, R.E.; Woolfson, A.D.; Donnelly, R.F. Microneedle arrays as transdermal and intradermal drug delivery systems: Materials science, manufacture and commercial development. Mater. Sci. Eng. R Rep. 2016, 104, 1–32. [Google Scholar]
- Han, D.H.; Kang, L.H. Piezoelectric properties of paint sensor according to piezoelectric materials. Funct. Compos. Struct. 2020, 2, 025002. [Google Scholar] [CrossRef]
- Pattipaka, S.; Bae, Y.M.; Jeong, C.K.; Park, K.I.; Hwang, G.T. Perovskite Piezoelectric-Based Flexible Energy Harvesters for Self-Powered Implantable and Wearable IoT Devices. Sensors 2022, 22, 9506. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Ma, Y.; Zheng, H.; Ramakrishna, S. Piezoelectric materials for flexible and wearable electronics: A review. Mater. Des. 2021, 211, 110164. [Google Scholar]
- Li, J.; Zhou, G.; Hong, Y.; He, W.; Wang, S.; Chen, Y.; Wang, C.; Tang, Y.; Sun, Y.; Zhu, Y. Highly sensitive, flexible and wearable piezoelectric motion sensor based on PT promoted β-phase PVDF. Sens. Actuators A Phys. 2022, 337, 113415. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temperature of Poling (°C) | (%) | |
|---|---|---|
| Alumina | Mylar | |
| 25 vs. 120 | 24.3 | 52.8 |
| 120 vs. 150 | 27.9 | 33.4 |
| 25 vs. 150 | 59.0 | 103.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jo, E.-B.; Lee, Y.-A.; Cho, Y.-A.; Günther, P.A.; Gebhardt, S.E.; Neubert, H.; Kim, H.-S. The 0-3 Lead Zirconate-Titanate (PZT)/Polyvinyl-Butyral (PVB) Composite for Tactile Sensing. Sensors 2023, 23, 1649. https://doi.org/10.3390/s23031649
Jo E-B, Lee Y-A, Cho Y-A, Günther PA, Gebhardt SE, Neubert H, Kim H-S. The 0-3 Lead Zirconate-Titanate (PZT)/Polyvinyl-Butyral (PVB) Composite for Tactile Sensing. Sensors. 2023; 23(3):1649. https://doi.org/10.3390/s23031649
Chicago/Turabian StyleJo, Eun-Bee, Yoon-A Lee, Yoon-A Cho, Paul A. Günther, Sylvia E. Gebhardt, Holger Neubert, and Hyun-Seok Kim. 2023. "The 0-3 Lead Zirconate-Titanate (PZT)/Polyvinyl-Butyral (PVB) Composite for Tactile Sensing" Sensors 23, no. 3: 1649. https://doi.org/10.3390/s23031649
APA StyleJo, E. -B., Lee, Y. -A., Cho, Y. -A., Günther, P. A., Gebhardt, S. E., Neubert, H., & Kim, H. -S. (2023). The 0-3 Lead Zirconate-Titanate (PZT)/Polyvinyl-Butyral (PVB) Composite for Tactile Sensing. Sensors, 23(3), 1649. https://doi.org/10.3390/s23031649