
Design and Experiments of a Real-Time Bale Density Monitoring System Based on Dynamic Weighing



Abstract
:1. Introduction
2. Materials and Methods
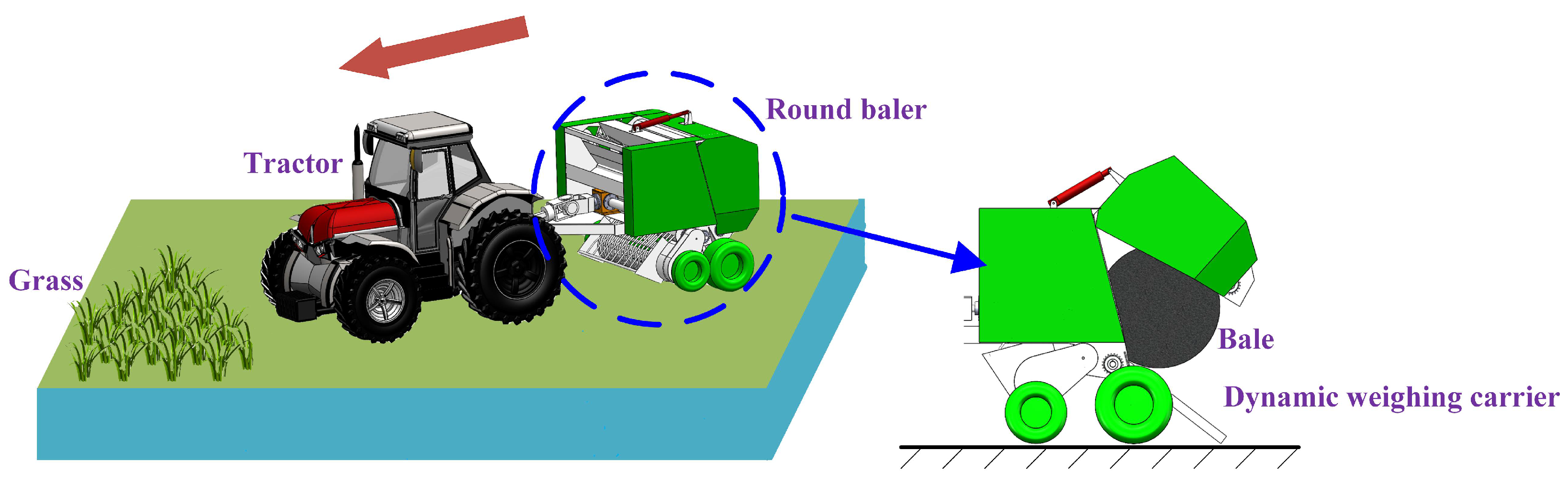
2.1. Principle and Analysis of Round Bale Weighing
2.1.1. Structure of the Weighing and Testing System
2.1.2. Analysis of Dynamic Weighing Models
2.2. Dynamics Analysis of the Bale Unloading Process
2.3. Design of a Real-Time Bale Density Monitoring System for Round Balers
2.3.1. Bale Density Real-Time Monitoring System Equipment
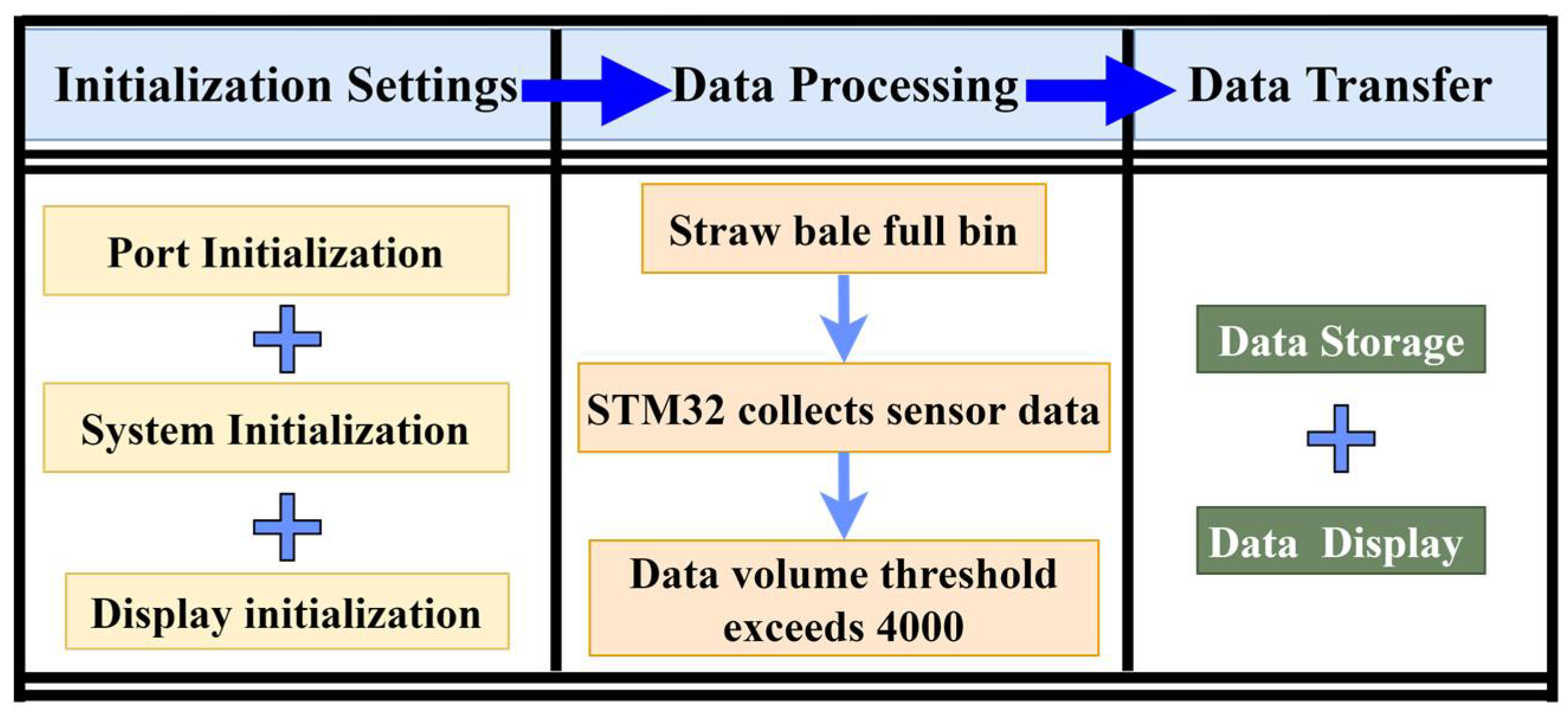
2.3.2. Bale Density Real Time Monitoring System Software System
2.4. Bale Density Real-Time Monitoring System Testing and Experiments
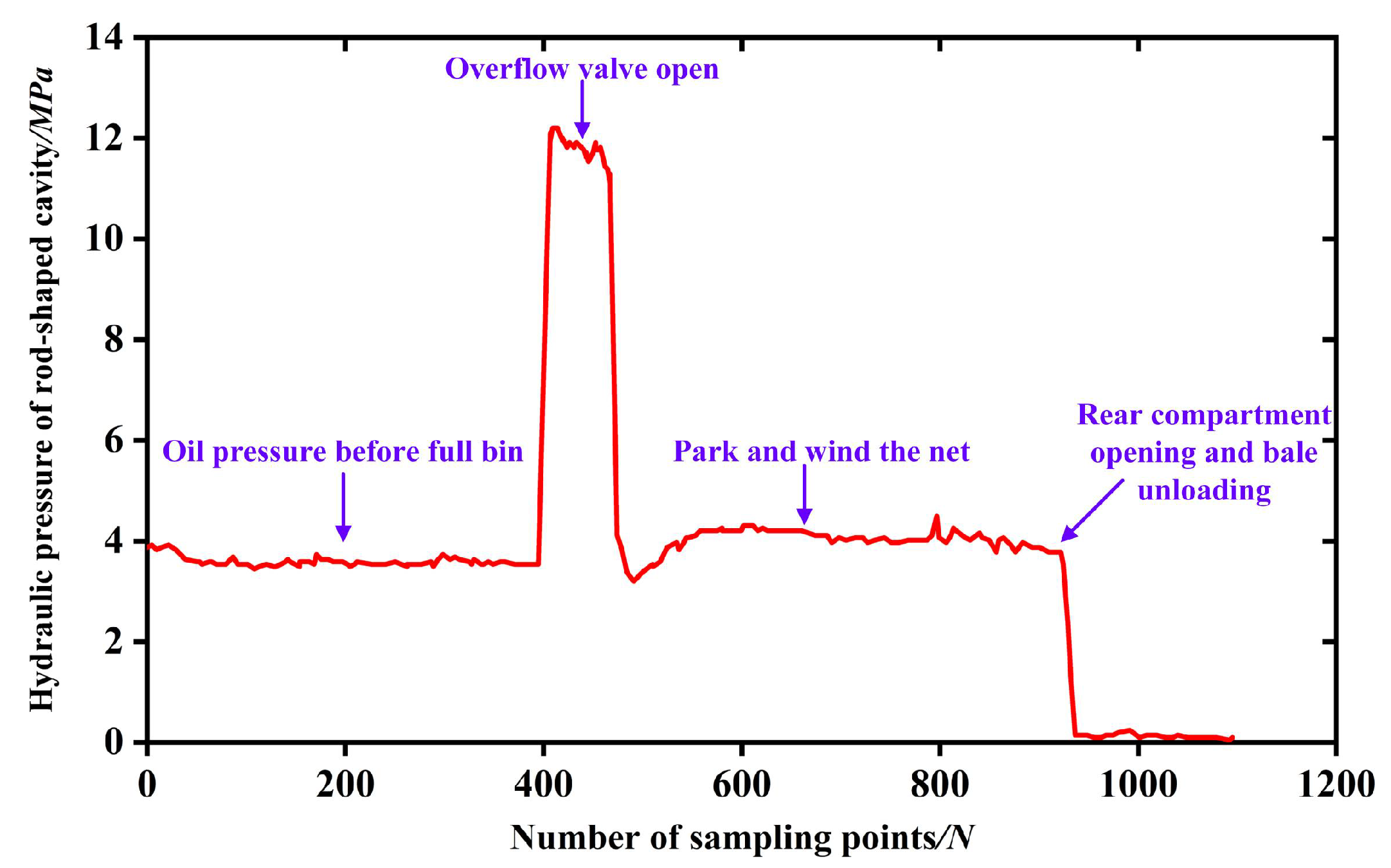
2.4.1. Backpack Cylinder Oil Pressure Detection during Round Baler Operation
2.4.2. Straw Bale Dynamic Weighing Model Calibration Experiment
2.4.3. Straw Bale Dynamic Weighing Model Validation Experiments
3. Discussion and Results
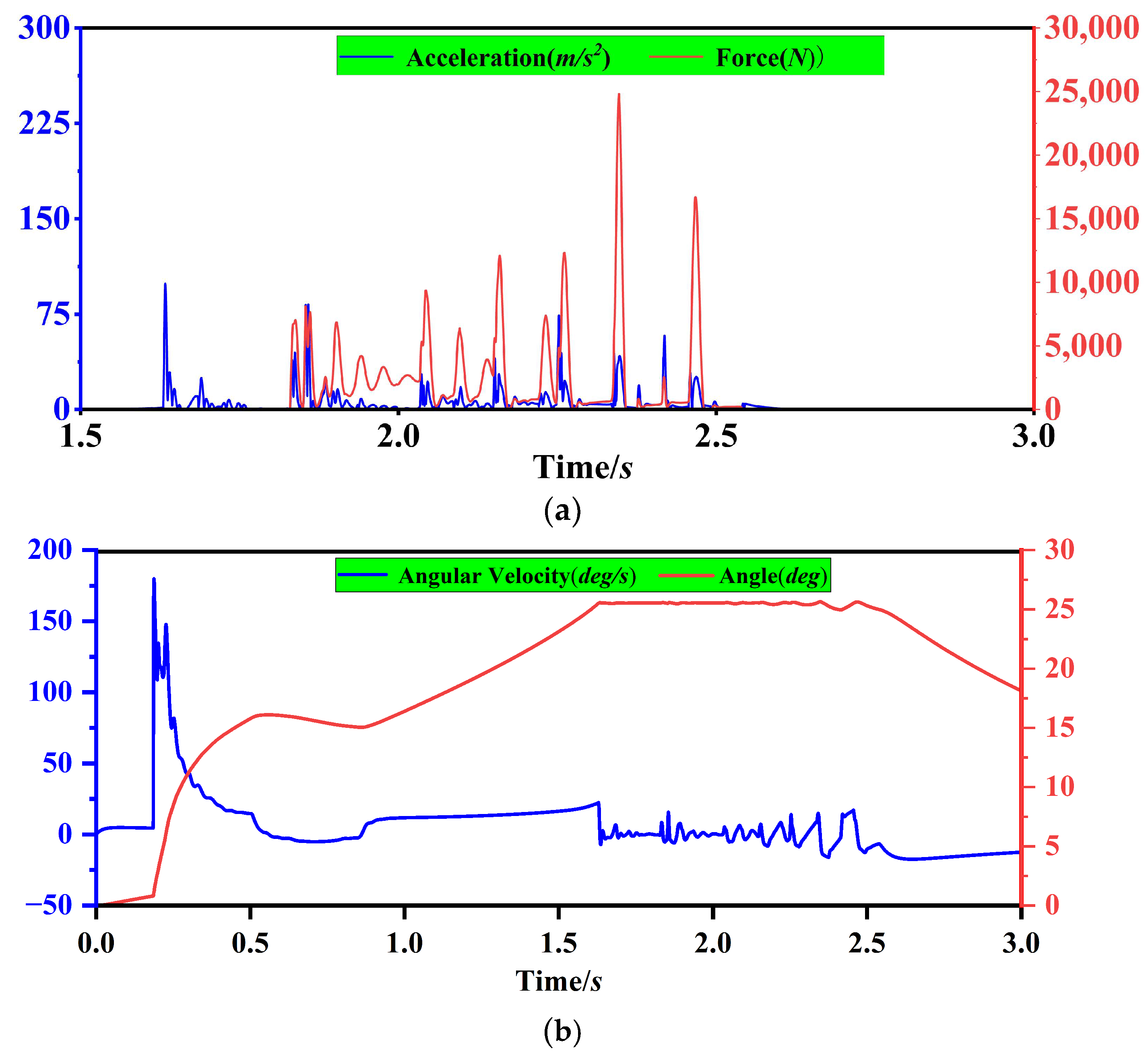
3.1. Analysis of Dynamics Simulation Results
3.2. Bale Density Real-Time Monitoring System Testing and Experiments (Analysis of Dynamics Simulation Results)
3.3. Analysis of Test Results of a Real-Time Bale Density Monitoring System
3.3.1. Analysis of Hydraulic Cylinder Test Results
3.3.2. Analysis of the Calibration Results of the Straw Bale Dynamic Weighing System
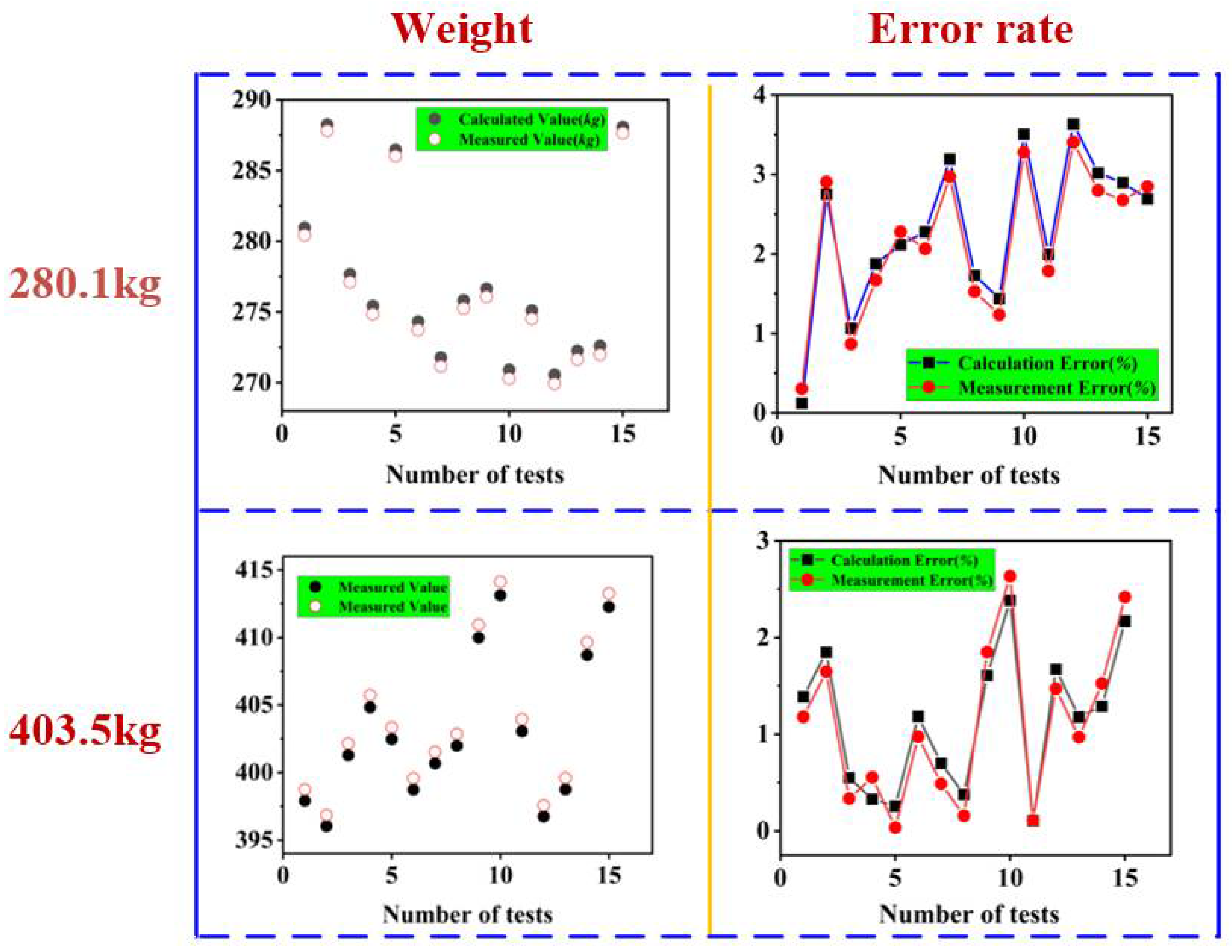
3.3.3. Repeatability Validation Tests of a Dynamic Weighing Model for Straw Bales
4. Conclusions
- (1)
- A dynamic bale weighing method based on pressure detection and attitude angle was proposed, and the structural design of the dynamic bale weighing table was completed. The dynamics of the bale unloading process were simulated based on ADAMS, and the motion of the bale and the load table during the unloading process and the change in the pressure, acceleration and attitude angle curve of the load table were analyzed. The dynamic bale weighing system based on the real-time down pressure and pitch angle of the weighing table was built based on multi-sensor fusion technology, and the dynamic weighing of the bale was realized.
- (2)
- We observed and analyzed the changes in the attitude angle of the loading table and the oil pressure in the rod chamber of the cylinder, and determined the reasons for the changes in the density of the formed bales. We completed the calibration test of the dynamic weighing system and obtained the calibration equations for the dynamic weighing system, and carried out repeatability verification tests on bales with actual weights of 280.1 kg and 405.3 kg. The maximum error between calculated and actual weight in the two sets of repeatability tests was 3.63%, and the maximum error after correction of the calibration equation was 3.40%, which is in accordance with the measurement accuracy requirements.
- (3)
- This research provides a solution for real-time monitoring of bale density, laying the foundation for the development of a baling agricultural robot. Further aspects of this research will continue, such as the development of dynamic weighing piezoelectric sensors on roads.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Duan, X.; Tang, Y.; Liu, F.; Fu, X.; Liu, F. Organic pollution control of agricultural land based on straw biochar. Acta Agric. Scand. Sect. B—Soil Plant Sci. 2022, 72, 237–247. [Google Scholar] [CrossRef]
- Redcay, S.; Koirala, A.; Liu, J. Effects of roll and flail conditioning systems on mowing and baling of Miscanthus × giganteus feedstock. Biosyst. Eng. 2018, 172, 134–143. [Google Scholar] [CrossRef]
- Wei, X.; Xu, L.; Zhichao, F.; Wei, Q.; Haifeng, L.; Mingliang, W. Design of compound machine for rice straw collecting and continuous baling. Trans. Chin. Soc. Agric. Eng. 2019, 35, 19–25. [Google Scholar] [CrossRef]
- Pari, L.; Suardi, A.; Santangelo, E.; García-Galindo, D.; Scarfone, A.; Alfano, V. Current and innovative technologies for pruning harvesting: A review. Biomass Bioenergy 2017, 107, 398–410. [Google Scholar] [CrossRef]
- Borowski, S.; Kaszkowiak, J.; Dulcet, E. How to Harvest Haylage Bales in Sustainable Agriculture. Appl. Sci. 2021, 11, 11508. [Google Scholar] [CrossRef]
- Han, K.J.; Collins, M.; Vanzant, E.; Dougherty, C. Bale density and moisture effects on alfalfa round bale silage. Crop Sci. 2004, 44, 914–919. [Google Scholar] [CrossRef]
- Shinners, K.J.; Barnett, N.G.; Schlesser, W.M. Measuring mass-flow-rate on forage cutting equipment. In Proceedings of the 2000 ASAE Annual International Meeting, Milwaukee, WI, USA, 9–12 July 2000; 2000; pp. 1–20. [Google Scholar]
- Sun, Y.; Buescher, W.; Lin, J.; Lammers, P.S.; Ross, F.; Maack, C.; Cheng, Q.; Sun, W. An improved penetrometer technique for determining bale density. Biosyst. Eng. 2010, 105, 273–277. [Google Scholar] [CrossRef]
- Maguire, S.; Godwin, R.; O’Dogherty, M.; Blackburn, K. A dynamic weighing system for determining individual square bale weights during harvesting. Biosyst. Eng. 2007, 98, 138–145. [Google Scholar] [CrossRef]
- Loftis, P.J.; Kirk, K.R.; Mueller, J.D.; Andrae, J.G. Development of a round bale weighing system for spring-loaded bale ramps. Appl. Eng. Agric. 2019, 35, 969–977. [Google Scholar] [CrossRef]
- Zhang, A.; Meng, Z.; Chen, L.; Wu, G.; Cong, Y.; An, X. Design and Experiment of Dynamic Weighing System for Small Square Baler. Trans. Chin. Soc. Agric. Mach. 2020, 51, 170–175. [Google Scholar] [CrossRef]
- Shang, Y.; Meng, Z.; Cong, Y.; Dong, J.; Luo, C.; Song, Z. Development of a control system with remote monitoring function for round baler. Comput. Electron. Agric. 2021, 182, 106044. [Google Scholar] [CrossRef]
- Guo, H.; Liu, J.; Lv, Q.; Hao, L.; Zhang, Y.; Luo, D. Research on Bale Weight Monitoring System of Square Baler. J. Agric. Mech. Res. 2022, 44, 88–92+99. [Google Scholar] [CrossRef]
- Wang, Q.; Jiang, Y.; Li, L.; Qin, J.; Chen, L. Performance analysis of a spring-tooth drum pickup of straw baler via coupling simulation. Int. J. Agric. Biol. Eng. 2021, 14, 159–165. [Google Scholar] [CrossRef]
- Xie, H.; Zhao, X.; Sun, Q.; Yang, K.; Li, F. A new virtual-real gravity compensated inverted pendulum model and ADAMS simulation for biped robot with heterogeneous legs. J. Mech. Sci. Technol. 2020, 34, 401–412. [Google Scholar] [CrossRef]
- Chen, L.; Li, W.; Yang, Y.; Miao, W. Evaluation and optimization of vehicle pedal comfort based on biomechanics. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 1402–1412. [Google Scholar] [CrossRef]
- Wang, X.; Yang, S.; Li, W.; Wang, Y. Vibratory finishing co-simulation based on ADAMS-EDEM with experimental validation. Int. J. Adv. Manuf. Technol. 2018, 96, 1175–1185. [Google Scholar] [CrossRef]
- Ciornei, F.; Alaci, S.; Ciogole, V.; Ciornei, M. Valuation of Coefficient of Rolling Friction by the Inclined Plane Method. IOP Conf. Ser. Mater. Sci. Eng. 2017, 200, 012006. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, J.; Zhang, D.; Chen, X.; Wang, Y. Nonlinear Correction for Fringe Projection Profilometry with Shifted-Phase Histogram Equalization. IEEE Trans. Instrum. Meas. 2022, 71, 1–9. [Google Scholar] [CrossRef]
- Liu, L.; Mei, T.; Niu, R.; Wang, J.; Liu, Y.; Chu, S. RBF-based monocular vision navigation for small vehicles in narrow space below maize canopy. Appl. Sci. 2016, 6, 182. [Google Scholar] [CrossRef]
- Wang, D.; He, C.; Wu, H.; You, Y.; Wang, G. Review of Alfalfa Full-mechanized Production Technology. Trans. Chin. Soc. Agric. Mach. 2017, 48, 1–25. [Google Scholar] [CrossRef]
- Zhang, D.; Fang, L.; Wei, Y.; Guo, J.; Tian, B. Structural Low-Level Dynamic Response Analysis Using Deviations of Idealized Edge Profiles and Video Acceleration Magnification. Appl. Sci. 2019, 9, 712. [Google Scholar] [CrossRef]
- Shi, R.; Wang, C.; He, T.; Xie, T. Analysis of Dynamic Characteristics of Pressure-Regulating and Pressure-Limiting Combined Relief Valve. Math. Probl. Eng. 2021, 2021, 3486143. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Straw Bale Density (kg/m3) | Poisson′s Ratio | Modulus of Elasticity (Mpa) |
|---|---|---|
| 188.446 | 0.35 | 0.049 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, J.; Chen, Z.; Liu, C.; Zhou, M.; Liu, L. Design and Experiments of a Real-Time Bale Density Monitoring System Based on Dynamic Weighing. Sensors 2023, 23, 1778. https://doi.org/10.3390/s23041778
Yin J, Chen Z, Liu C, Zhou M, Liu L. Design and Experiments of a Real-Time Bale Density Monitoring System Based on Dynamic Weighing. Sensors. 2023; 23(4):1778. https://doi.org/10.3390/s23041778
Chicago/Turabian StyleYin, Jianjun, Zhijian Chen, Chao Liu, Maile Zhou, and Lu Liu. 2023. "Design and Experiments of a Real-Time Bale Density Monitoring System Based on Dynamic Weighing" Sensors 23, no. 4: 1778. https://doi.org/10.3390/s23041778
APA StyleYin, J., Chen, Z., Liu, C., Zhou, M., & Liu, L. (2023). Design and Experiments of a Real-Time Bale Density Monitoring System Based on Dynamic Weighing. Sensors, 23(4), 1778. https://doi.org/10.3390/s23041778