
Study on Creepage Control for PLS-160 Wheel–Rail Adhesion Test Rig Based on LADRC


Abstract
:1. Introduction
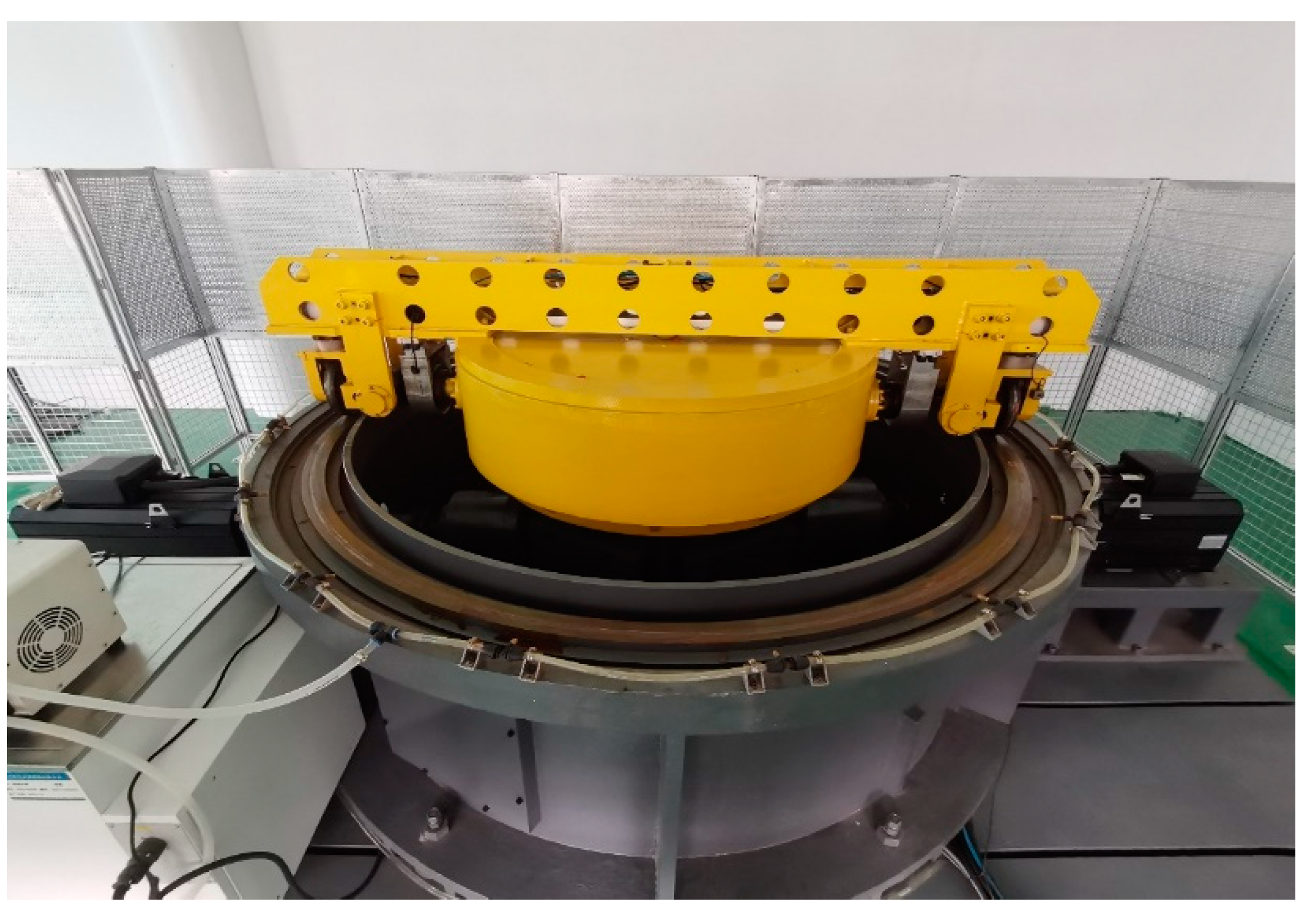
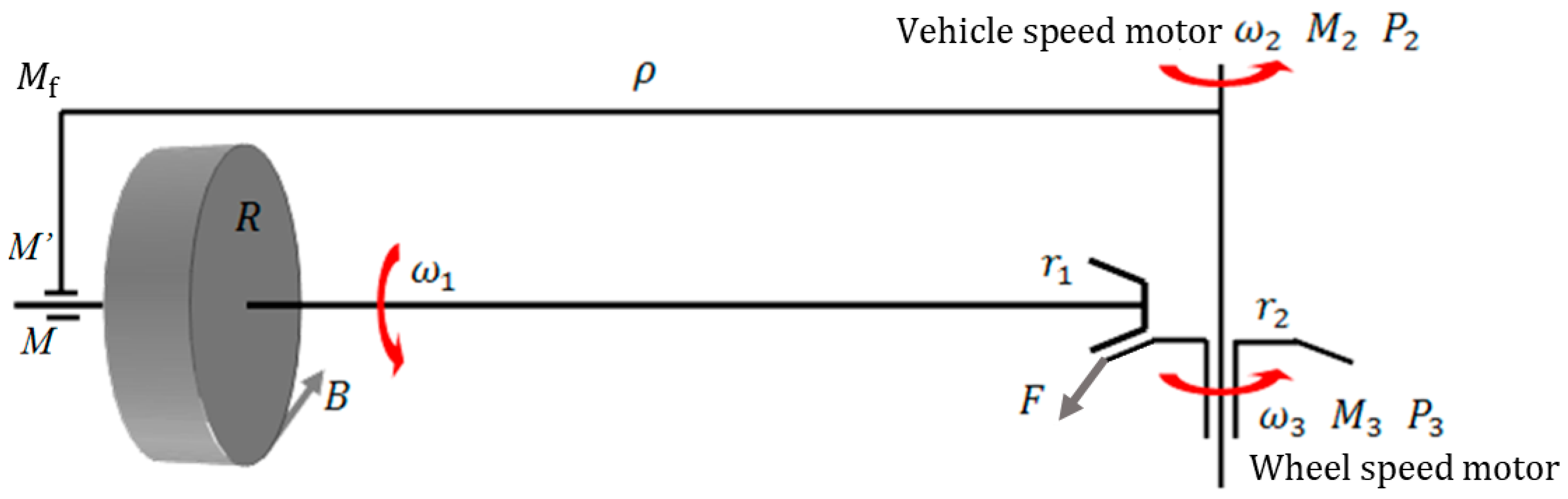
2. PLS-160 Wheel–Rail Adhesion Test Rig
3. Nonlinear Disturbance Analysis of Wheel–Rail Adhesion Test Rig
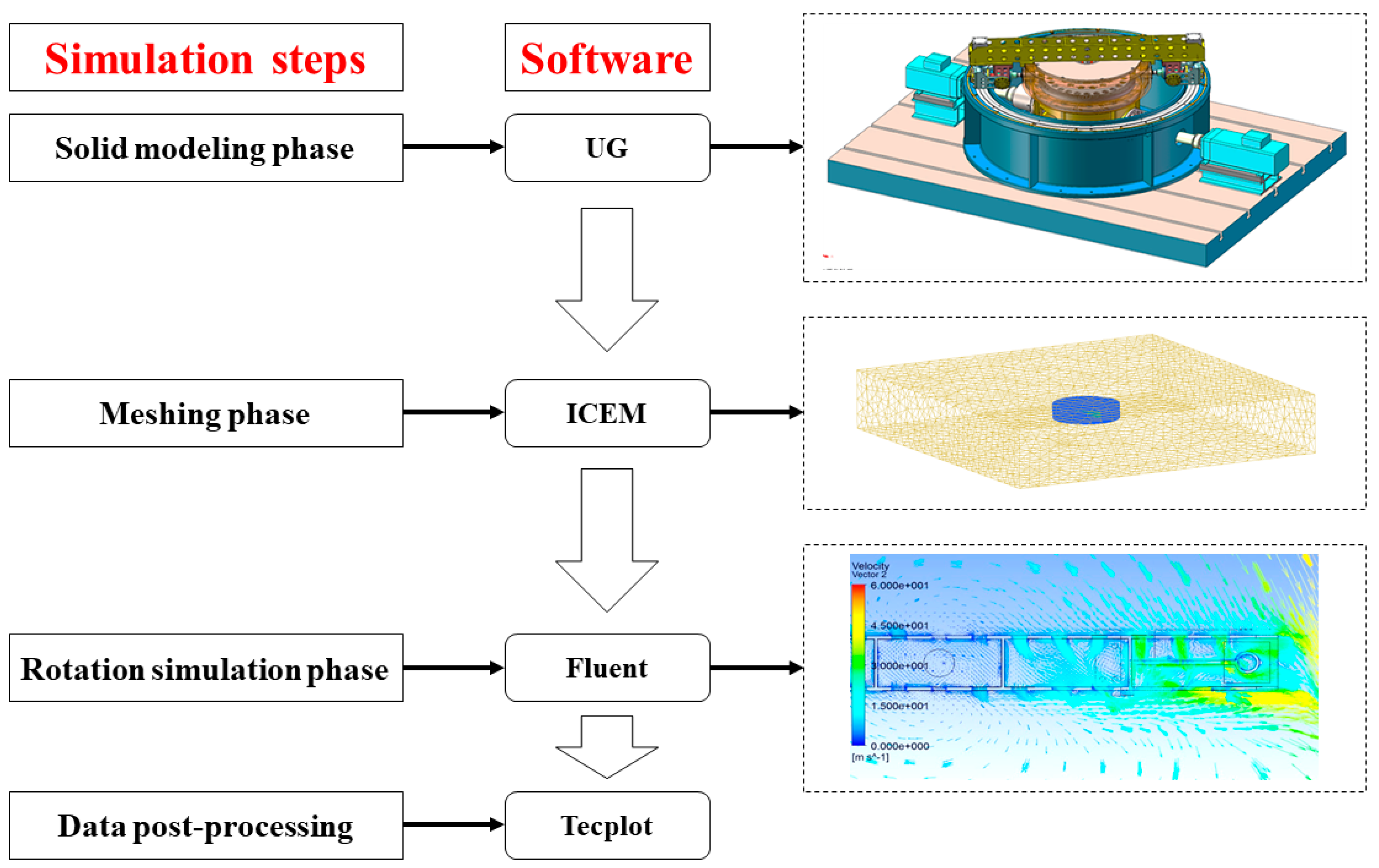
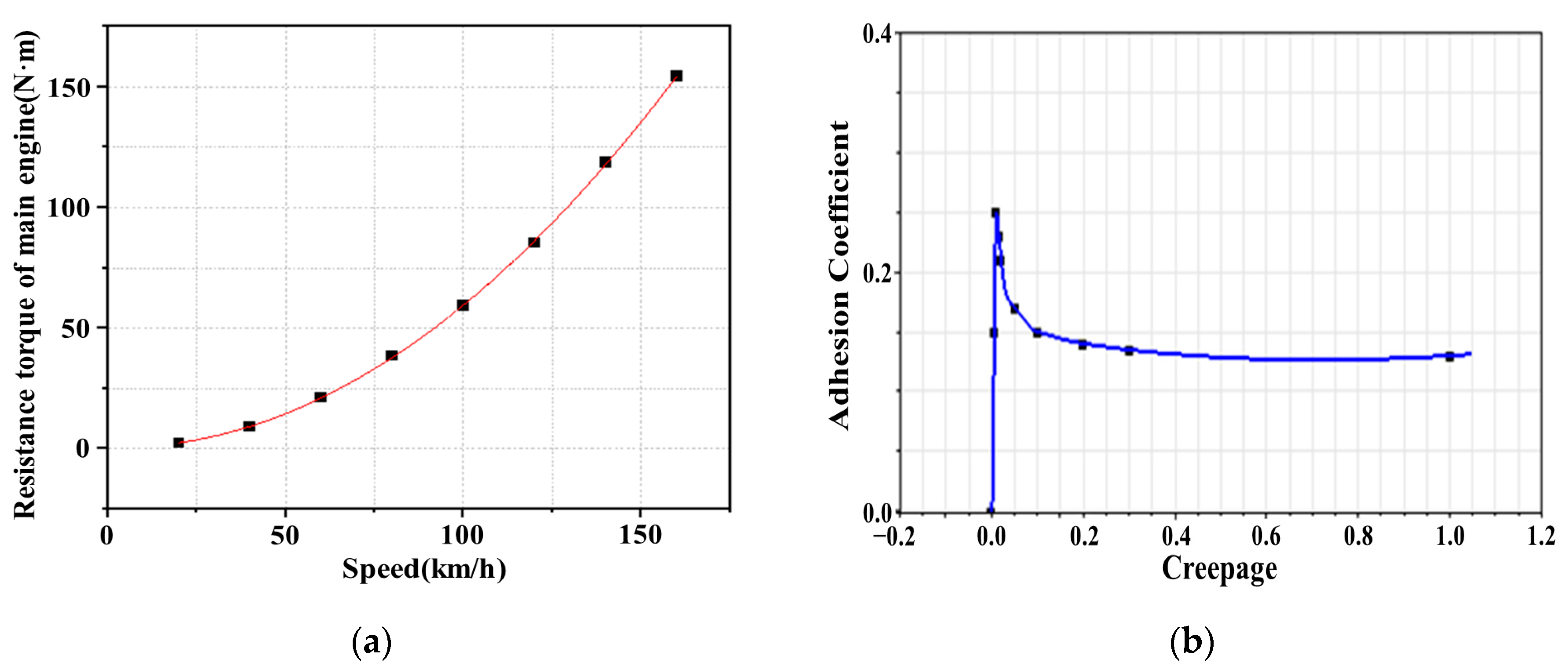
3.1. Air Resistance
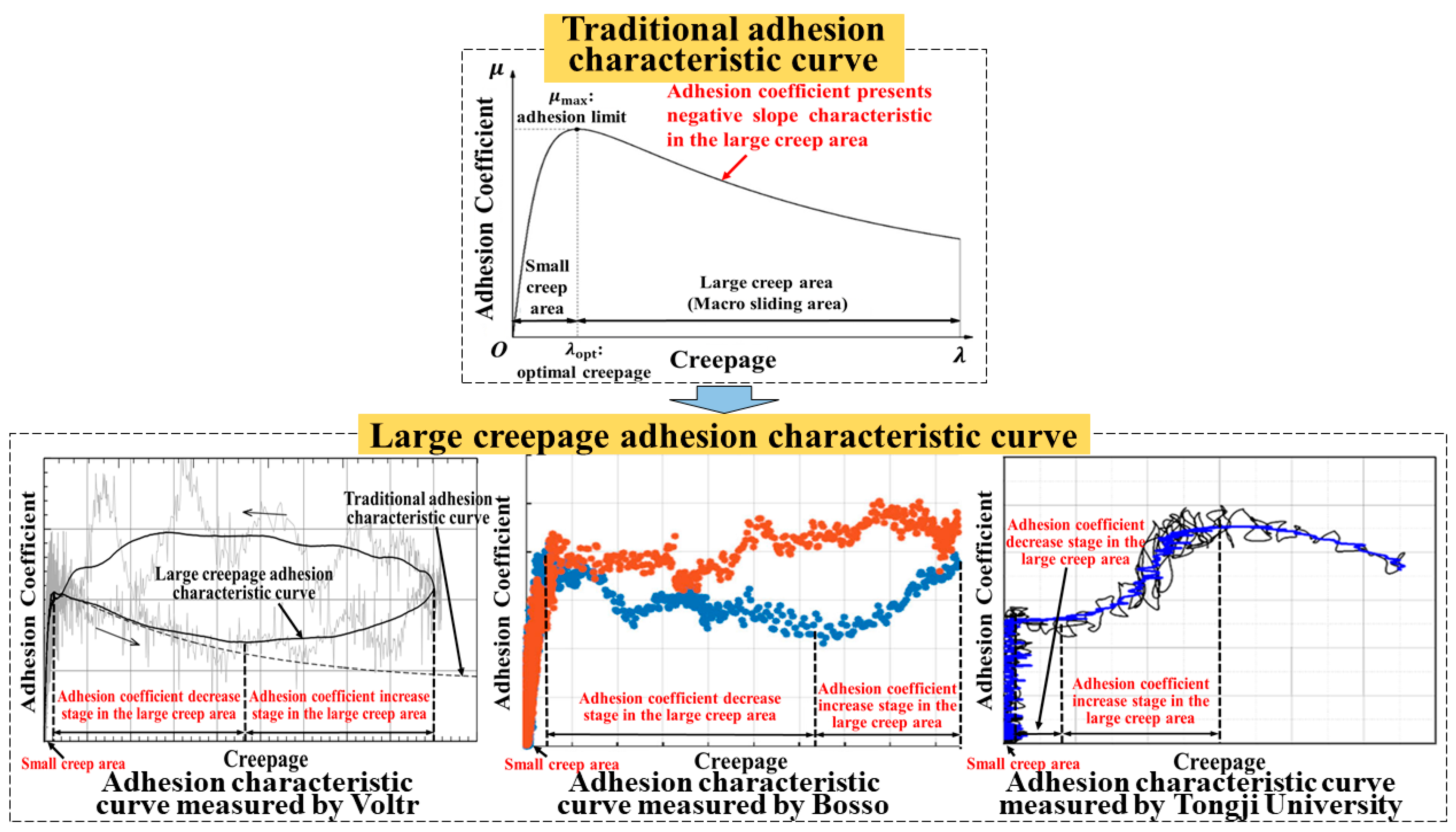
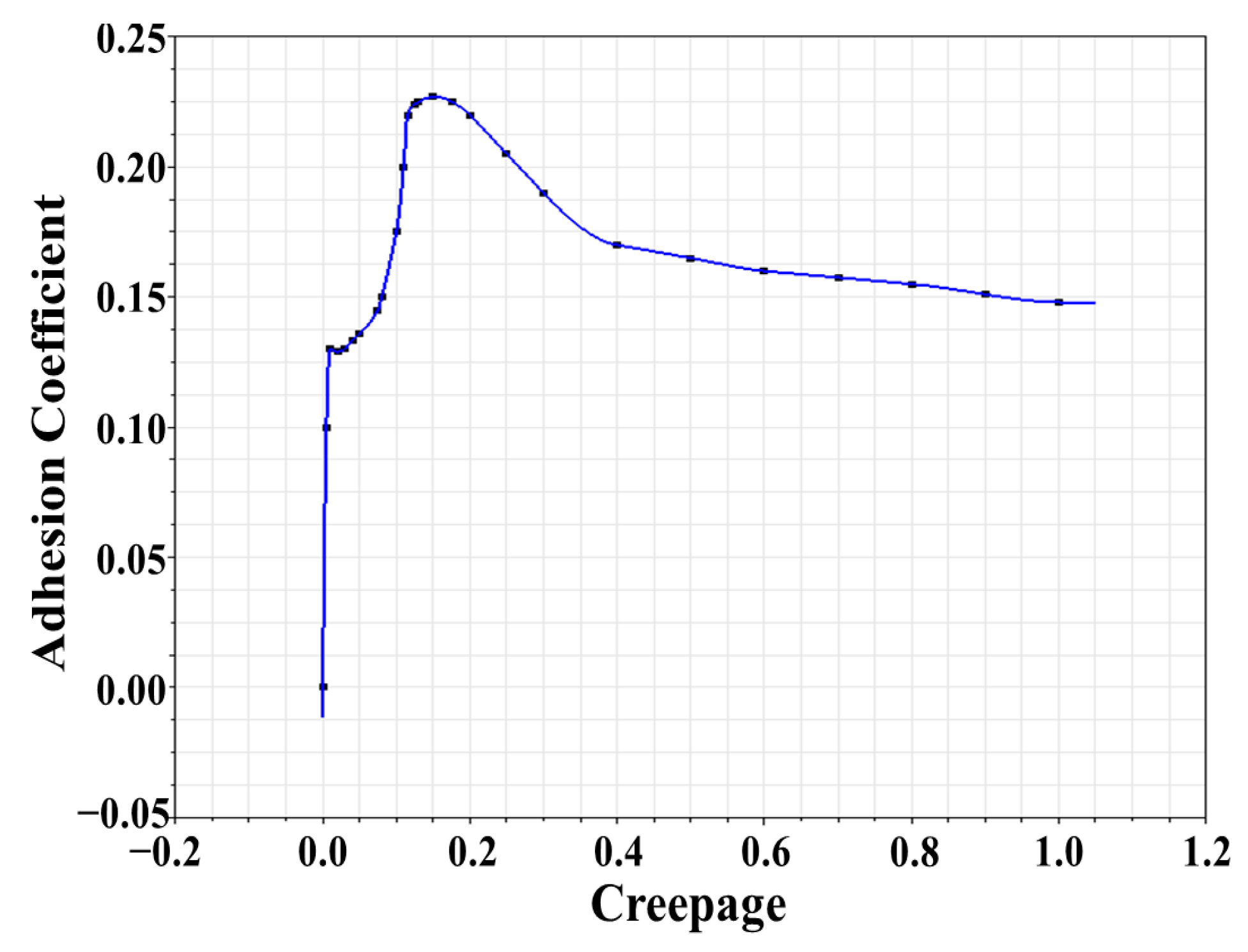
3.2. Adhesion Coefficient–Creepage Characteristic
3.3. Mechanical Structure Transmission Vibration
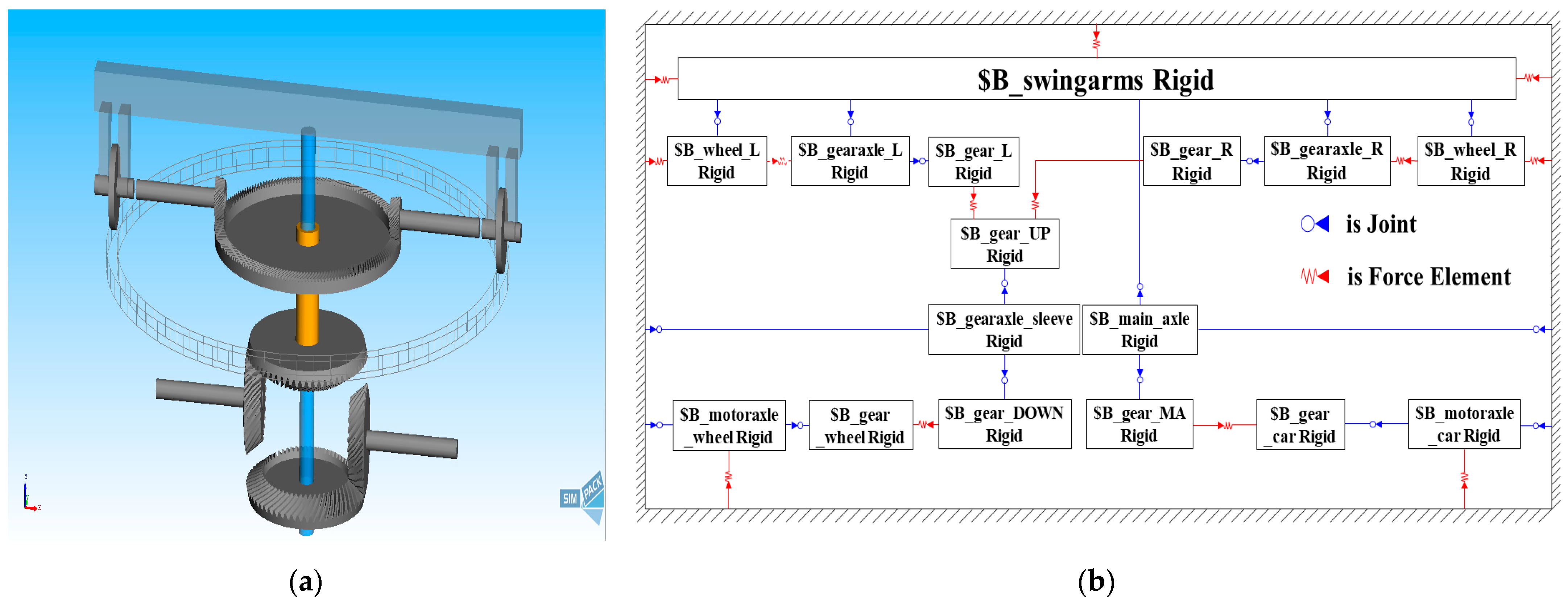
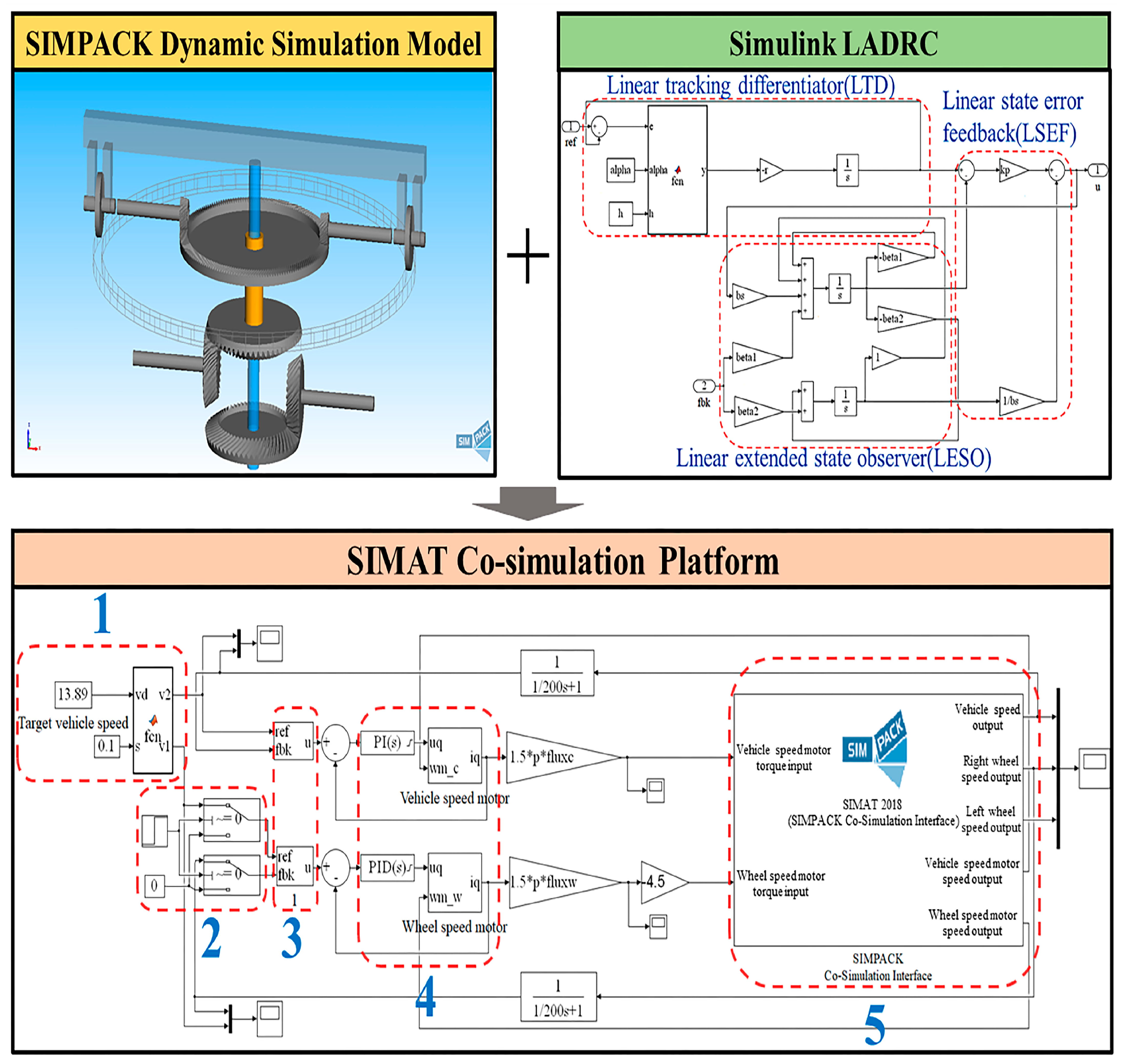
4. Dynamic Simulation Model of Wheel–Rail Adhesion Test Rig
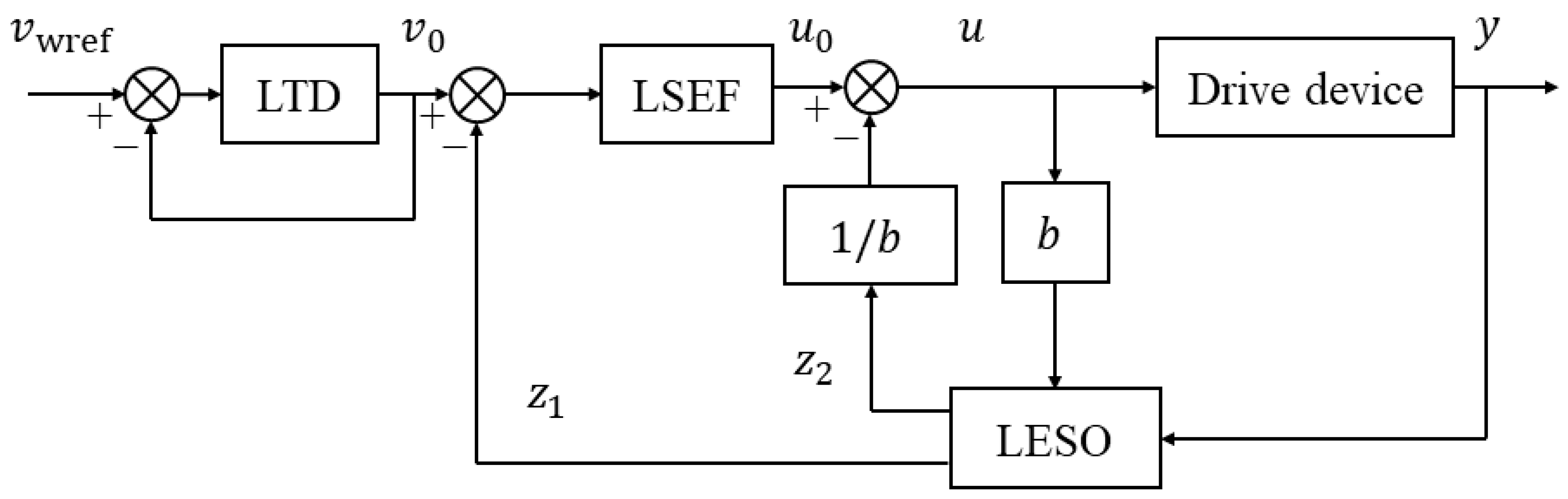
5. LADRC Based on Double Closed-Loop Speed and Torque Control Strategy
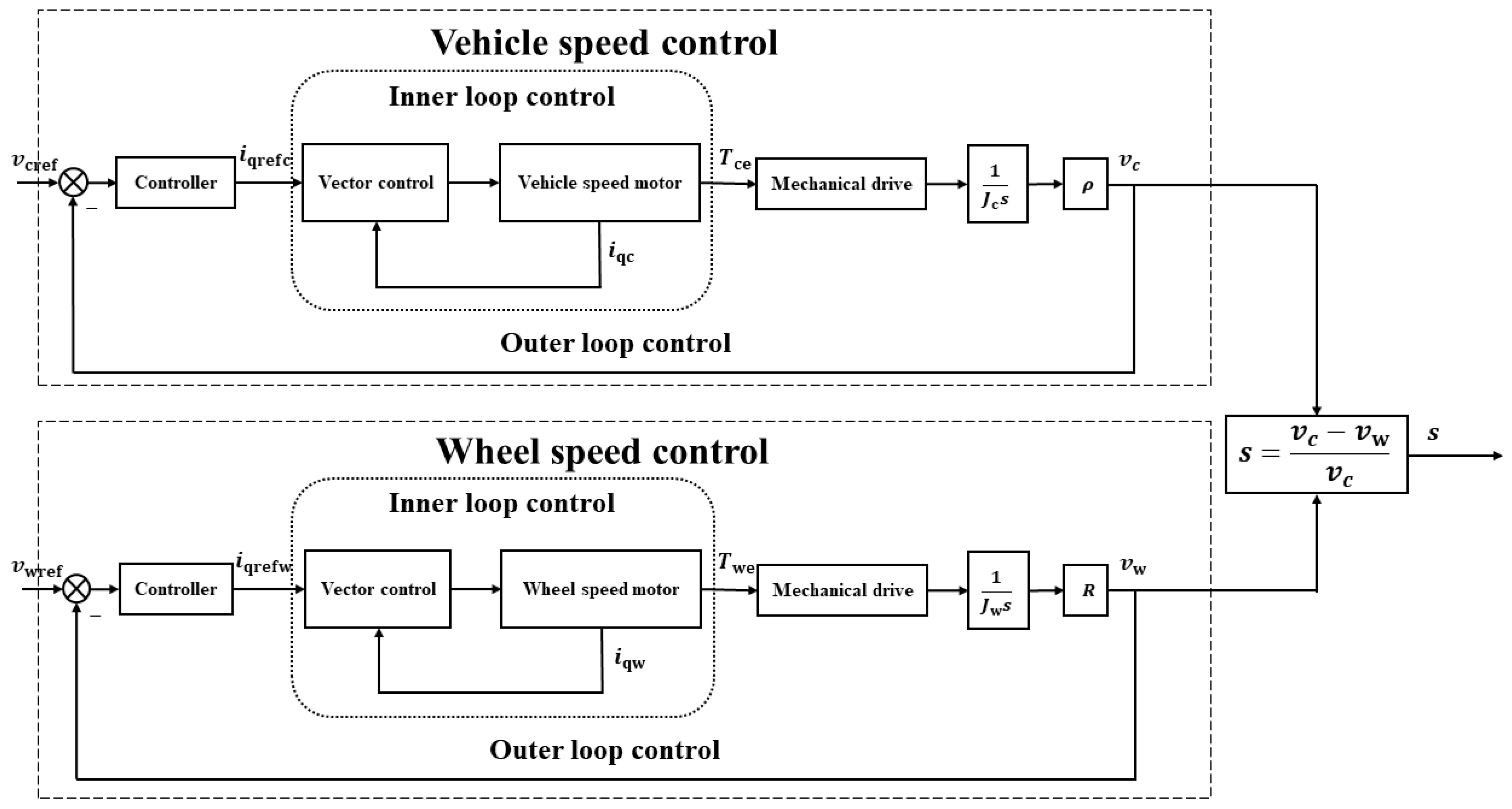
5.1. Double Closed-Loop Speed and Torque Control Strategy
5.2. Study of LADRC for PLS-160 Wheel–Rail Adhesion Test Rig
6. Creepage Control Based on SIMAT Co-Simulation Platform
6.1. Establishment of SIMAT Co-Simulation Platform
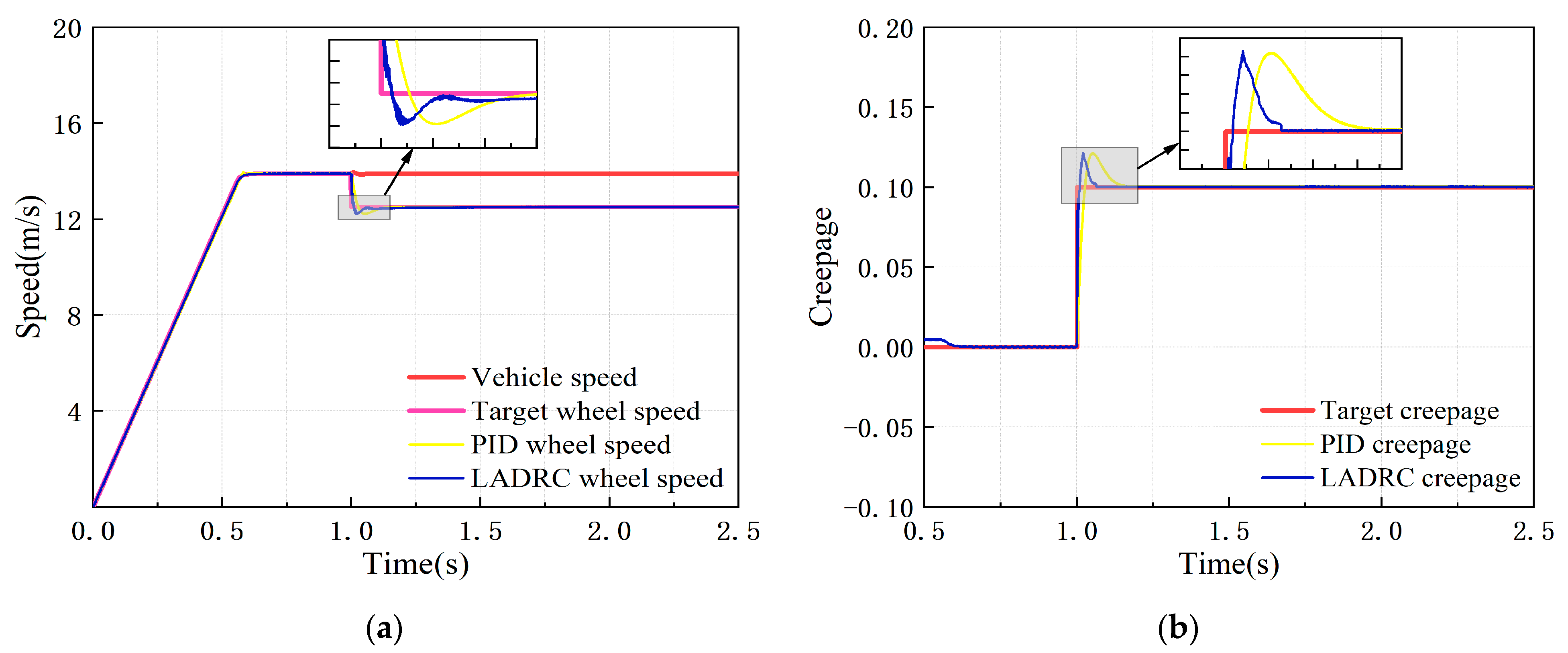
6.2. Simulation Results and Discussion
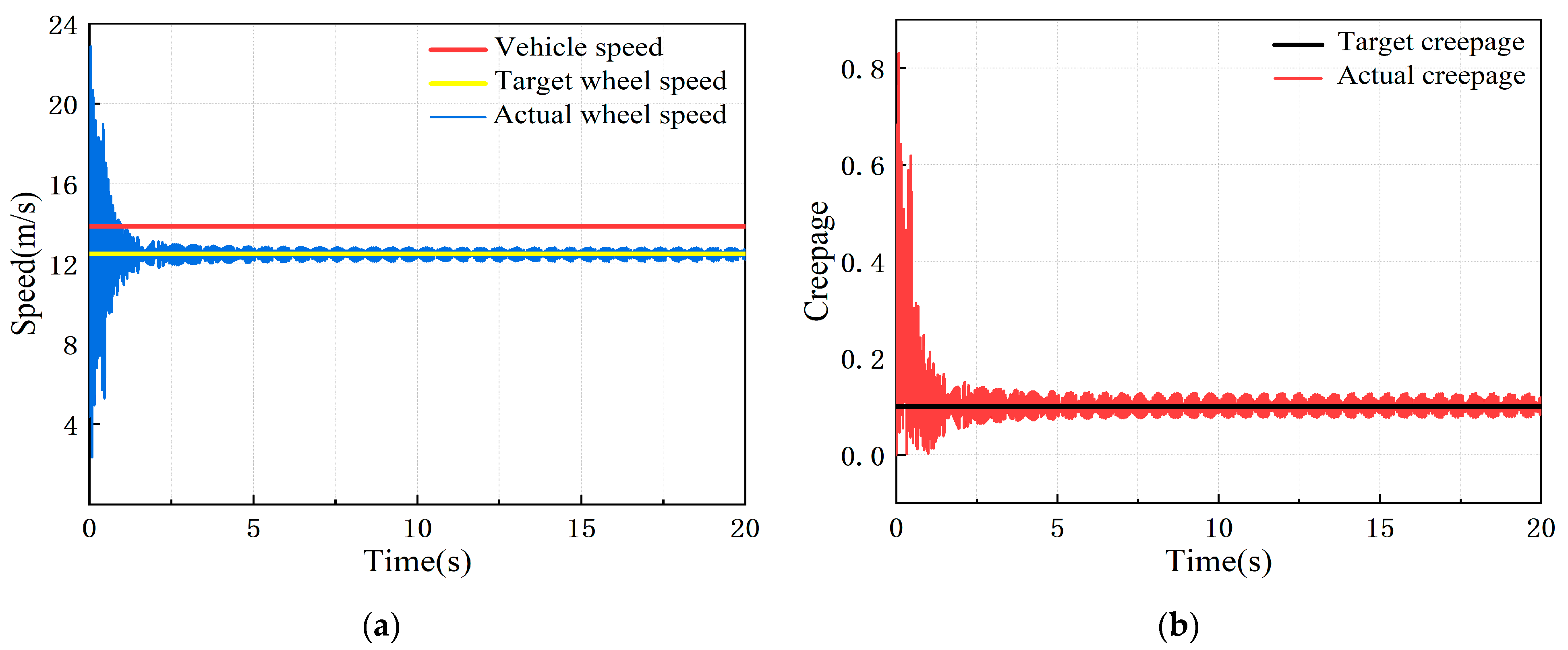
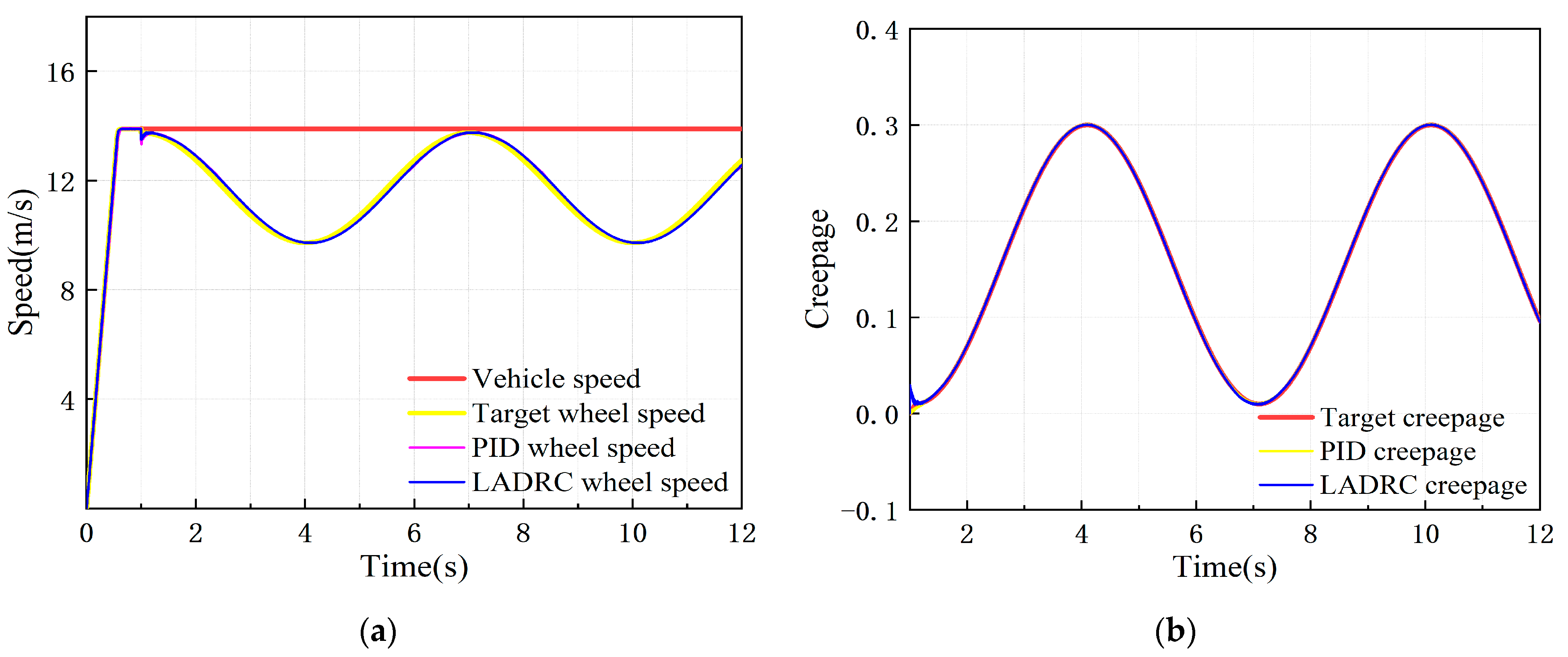
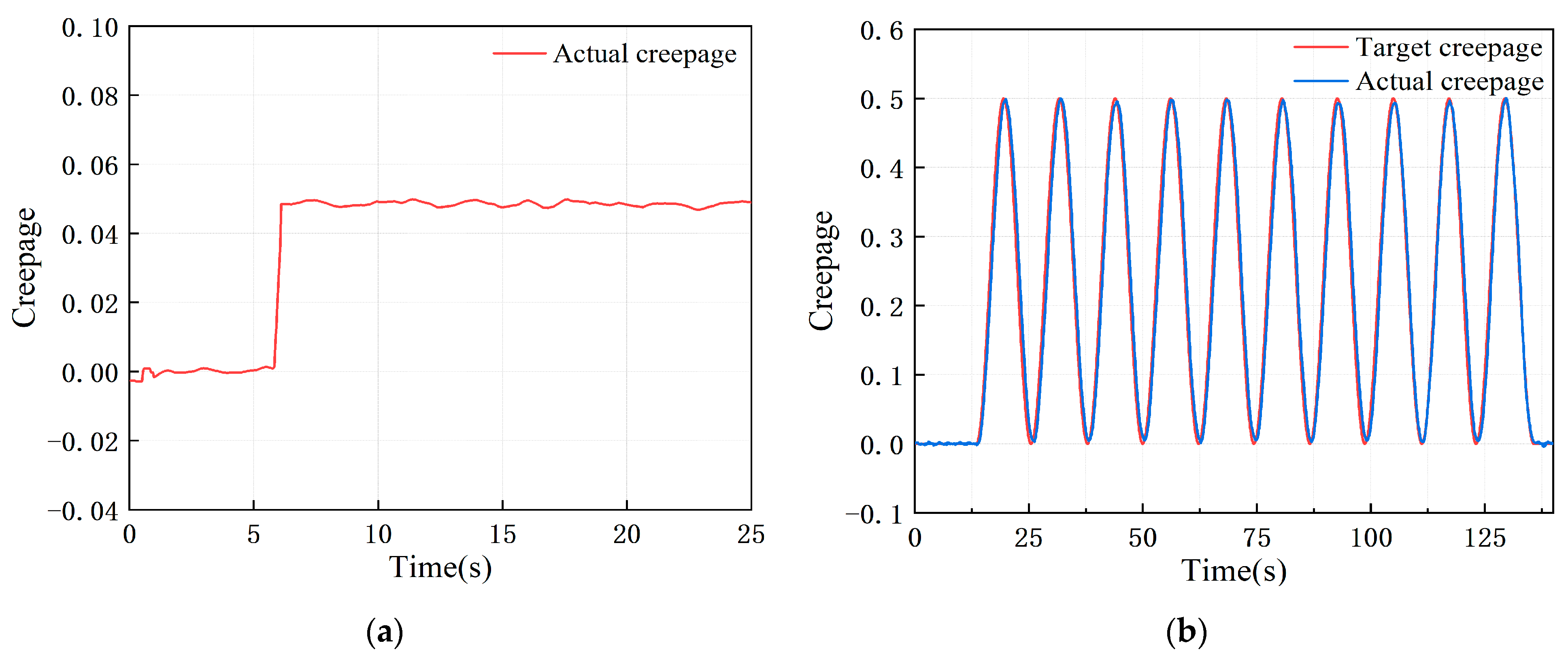
6.2.1. Constant Creepage Condition
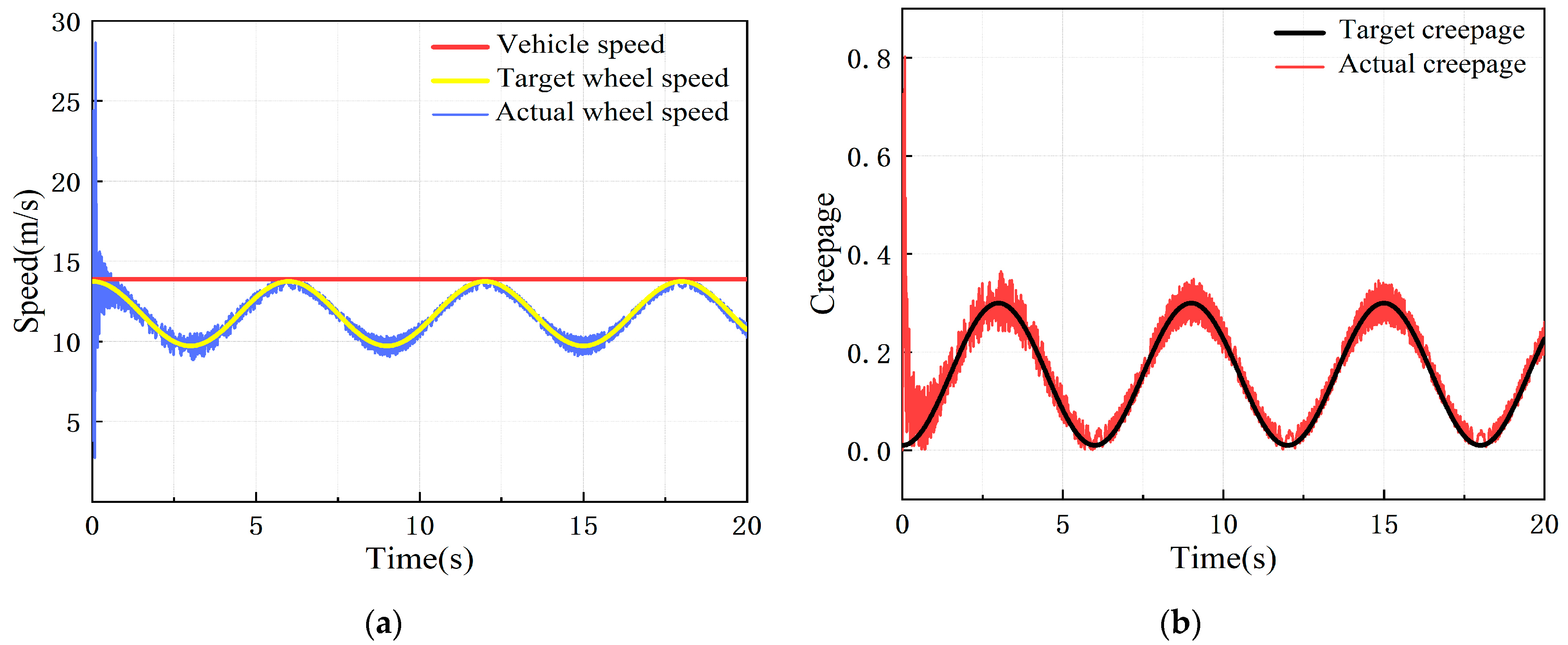
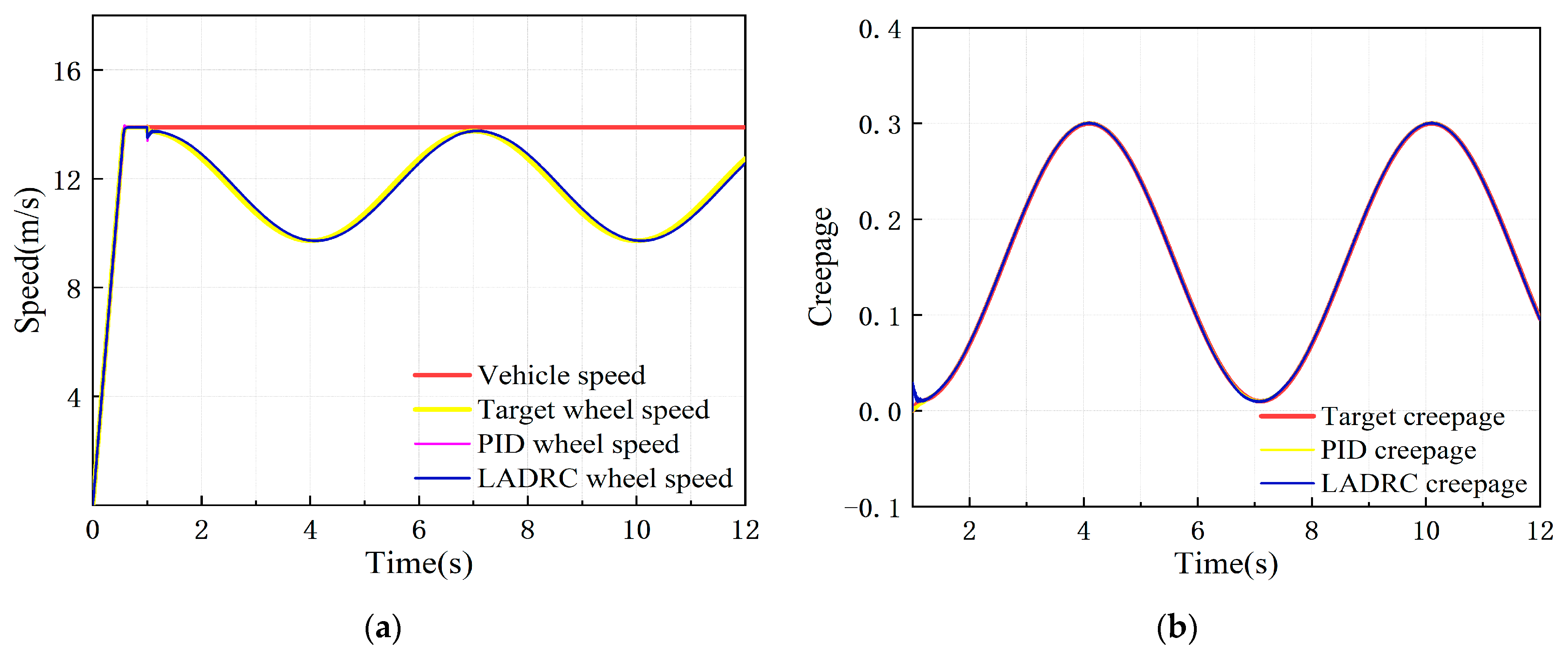
6.2.2. Variable Creepage Condition
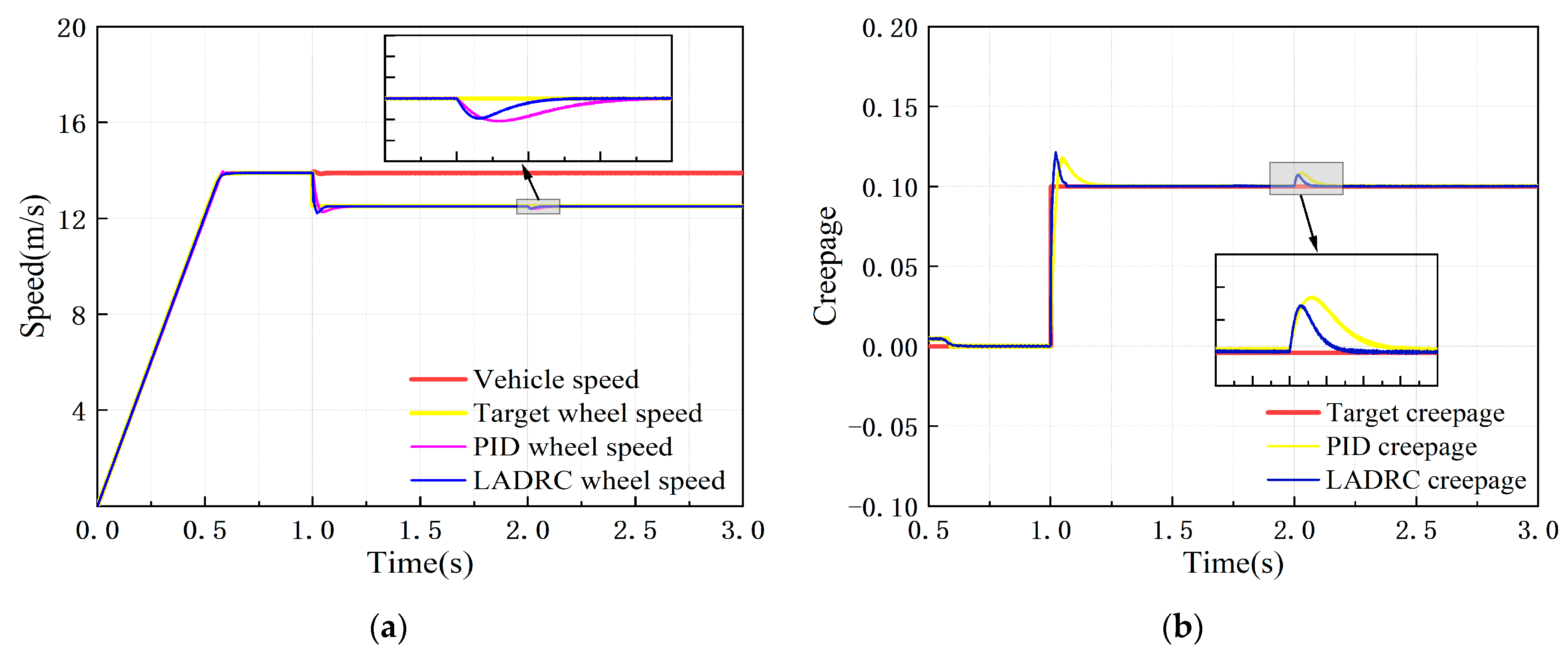
6.2.3. Condition of Sudden Decrease in Adhesion Coefficient
6.2.4. Variable Adhesion Characteristic Condition
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, H.; Tanimoto, H. Experimental observation of temperature and surface roughness effects on wheel/rail adhesion in wet conditions. Int. J. Rail Transp. 2018, 6, 101–112. [Google Scholar] [CrossRef]
- Trummer, G.; Buckley-Johnstone, L.E.; Voltr, P.; Meierhofer, A.; Lewis, R.; Six, K. Wheel-rail creep force model for predicting water induced low adhesion phenomena. Tribol. Int. 2017, 109, 409–415. [Google Scholar] [CrossRef]
- Buckley-Johnstone, L.E.; Trummer, G.; Voltr, P.; Six, K.; Lewis, R. Full-scale testing of low adhesion effects with small amounts of water in the wheel/rail interface. Tribol. Int. 2020, 141, 105907. [Google Scholar] [CrossRef]
- Wang, W.J.; Zhang, H.F.; Wang, H.Y.; Liu, Q.Y.; Zhu, M.H. Study on the adhesion behavior of wheel/rail under oil, water and sanding conditions. Wear 2011, 271, 2693–2698. [Google Scholar] [CrossRef]
- Shen, M.Q.; Wang, X.M.; Park, J.H.; Yi, Y.; Che, W.W. Extended Disturbance-Observer-Based Data-Driven Control of Networked Nonlinear Systems with Event-Triggered Output. IEEE Trans. Syst. Man Cybern. Syst. 2022, 1–12. [Google Scholar] [CrossRef]
- Gu, Y.; Park, J.H.; Shen, M.Q.; Liu, D. Event-triggered control of Markov jump systems against general transition probabilities and multiple disturbances via adaptive-disturbance-observer approach. Inf. Sci. 2022, 608, 1113–1130. [Google Scholar] [CrossRef]
- Cui, J.R.; Li, Q.; Zhang, B.; Liu, G.Y. Permanent Magnet Synchronous Motor of Variable Universe Adaptive Fuzzy PID Control. Proc. CSEE 2013, 33, 190–194. [Google Scholar]
- Zeng, W.L.; Wang, X.S.; Lv, X.J.; Weng, Y.W. Research on Control Performance of Micro Gas Turbine Generator Set based on Fuzzy PID. J. Eng. Therm. Energy Power 2021, 36, 212–221. [Google Scholar]
- Yan, J.H.; Lin, H.Y.; Feng, Y.; Guo, X.; Huang, Y.K.; Zhu, Z.Q. Improved sliding mode model reference adaptive system speed observer for fuzzy control of direct-drive permanent magnet synchronous generator wind power generation system. IET Renew. Power Gener. 2013, 7, 28–35. [Google Scholar] [CrossRef]
- Lv, X.; Chen, J.; Lv, C.X.; Dong, Y.H. Adaptive Control of Permanent Magnet Synchronous Motor Based on Fuzzy Logic. Control Eng. China 2022, 29, 837–843. [Google Scholar]
- Zhou, L.; Su, M.X.; Wang, J. Fuzzy Multi-vector Model Predictive Control of Permanent Magnet Synchronous Motor. J. Electr. Eng. 2022, 1–12. Available online: https://kns.cnki.net/kcms/detail/10.1289.TM.20221031.1743.002.html (accessed on 30 November 2022).
- Khoudir, K.; Toufik, R.; Smail, M.; Adel, O.; Djamila, R.; Vojtech, B.; Lukas, P.; Stanislav, M.; Mohit, B.; Sherif, S.M.G. Model Predictive Direct Torque Control and Fuzzy Logic Energy Management for Multi Power Source Electric Vehicles. Sensors 2022, 22, 5669. [Google Scholar]
- Zhang, Z.; Zhou, Y.Z. An improved variable structure active disturbance rejection control for the permanent magnet synchronous motor position servo system. Chin. J. Sci. Instrum. 2022, 43, 263–271. [Google Scholar]
- Sun, B.; Wang, H.X.; Su, T.; Sheng, C.Y.; Lv, X.R. Nonlinear Active Disturbance Rejection Controller Design and Tuning for Permanent Magnet Synchronous Motor Speed Control System. Proc. CSEE 2020, 40, 6715–6725. [Google Scholar]
- Chen, C.; Tian, C.; Huang, T.X.; Zhu, W.L. Design and validation of a wheel-rail adhesion simulator in PLS-Circulator. J. Phys. Conf. Ser. 2022, 2355, 012038. [Google Scholar] [CrossRef]
- Vermeulen, P.J.; Johnson, K.J. Contact of Nonspherical Elastic Bodies Transmitting Tangential Forces. J. Appl. Mech. 1964, 31, 338. [Google Scholar] [CrossRef]
- Kalker, J.J. A fast algorithm for the simplified theory of rolling contact. Veh. Syst. Dyn. 1982, 11, 1–13. [Google Scholar] [CrossRef]
- Shen, Z.Y.; Hedrick, J.K.; Elkins, J.A. A comparison of alternative creep force models for rail vehicle dynamic analysis. Veh. Syst. Dyn. 1983, 12, 79–83. [Google Scholar] [CrossRef]
- Polach, O. A Fast Wheel-Rail Forces Calculation Computer Code. Veh. Syst. Dyn. 2000, 33, 728–739. [Google Scholar] [CrossRef]
- Polach, O. Creep forces in simulations of traction vehicles running on adhesion limit. Wear 2005, 258, 992–1000. [Google Scholar] [CrossRef]
- Piryagin, M.; Polach, O.; Cole, C. Creep force modelling for rail traction vehicles based on the Fastsim algorithm. Veh. Syst. Dyn. 2013, 51, 1765–1783. [Google Scholar] [CrossRef]
- Voltr, P.; LATA, M. Transient wheel–rail adhesion characteristics under the cleaning effect of sliding. Veh. Syst. Dyn. 2015, 53, 605–618. [Google Scholar] [CrossRef]
- Bosso, N.; Magelli, M.; Zampieri, N. Investigation of adhesion recovery phenomenon using a scaled roller-rig. Veh. Syst. Dyn. 2019, 59, 295–312. [Google Scholar] [CrossRef]
- Zhou, J.J.; Wu, M.L.; Tian, C. Experimental investigation on wheel–rail adhesion characteristics under water and large sliding conditions. Ind. Lubr. Tribol. 2020, 73, 366–372. [Google Scholar] [CrossRef]
- Chang, C.Y.; Chen, B.; Cai, Y.W.; Wang, J.B. Experimental Study on Large Creepage Adhesion of Wheel/Rail Braking at 400 km·h−1 (I)-Adhesion Characteristics under Water Medium. China Railw. Sci. 2022, 43, 96–103. [Google Scholar]
- Chang, C.Y.; Chen, B.; Cai, Y.W.; Li, G. Experimental Study on Large Creepage Adhesion of Wheel/Rail Braking at 400 km·h−1 (II)-Effect of Longitudinal Creepage Control Model on Adhesion Characteristics in Water Medium. China Railw. Sci. 2022, 43, 87–93. [Google Scholar]
- Liu, Y.S.; Yang, S.X.; Wang, W. An active disturbance-rejection flight control method for quad-rotor unmanned aerial vehicles. Control Theory Appl. 2015, 32, 1351–1360. [Google Scholar]
- Qu, Y.; Zhang, B.; Chu, H.R.; Yang, X.X.; Shen, H.H.; Zhang, J.Z. Linear-Nonlinear Switching Active Disturbance Rejection Speed Controller for Permanent Magnet Synchronous Motors. Sensors 2022, 22, 9611. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, Y.; Tan, L.; Zhao, C. Torque Ripple Suppression for Permanent-Magnet Synchronous Motor based on Enhanced LADRC Strategy. J. Electr. Eng. Technol. 2022, 17, 2753–2760. [Google Scholar] [CrossRef]
- Gao, Z.Q. Scaling and Bandwidth-Parameterization Based Controller Tuning. In Proceedings of the IEEE 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003. [Google Scholar]
- Gao, Q.H.; Dong, J.C. Discussion on observation error of linear extended state observer. Control Decis. 2019, 34, 2576–2584. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error Range | Indicator |
|---|---|
| Speed control error range | <1 km/h |
| Creepage control error range | <1% |
| Vehicle speed (km/h) | 20 | 40 | 60 | 80 | 100 | 120 | 140 | 160 |
| Air resistance torque (N·m) | 2.38 | 8.99 | 21.06 | 38.5 | 59.29 | 85.45 | 118.67 | 154.44 |
| Gear Type | Number of Teeth | Module (mm) | Reference Cone Angle (°) | Radial Modification Coefficient | Gear Ratio |
|---|---|---|---|---|---|
| Revolution input large gear | 59 | 9 | 67.036 | −0.141 | 2.36 |
| Revolution input small gear | 25 | 9 | 22.964 | 0.141 | |
| Rotation input large gear | 59 | 9 | 67.036 | −0.141 | 2.36 |
| Rotation input small gear | 25 | 9 | 22.964 | 0.141 | |
| Rotation output large gear | 181 | 5 | 84.007 | −0.228 | 9.53 |
| Rotation output small gear | 19 | 5 | 5.993 | 0.228 |
| Motor Type | Parameter | Value |
|---|---|---|
| Vehicle speed motor | Vehicle speed motor transmission ratio | 0.4237 |
| Vehicle speed motor winding resistance | 0.0295 | |
| Vehicle speed motor winding inductance | 1.1 × 10−4 | |
| Vehicle speed motor maximum current | 375 | |
| Vehicle speed motor magnetic pole number | 4 | |
| Vehicle speed motor equivalent moment of inertia at load end | 81.9942 | |
| Vehicle speed motor voltage constant | 314 | |
| Vehicle speed motor torque constant | 2.60 | |
| Vehicle speed motor permanent magnet flux linkage | 0.4327 | |
| Wheel speed motor | Wheel speed motor transmission ratio | 0.897 |
| Wheel speed motor winding resistance | 0.068 | |
| Wheel speed motor winding inductance | 2 × 10−4 | |
| Wheel speed motor maximum current | 186 | |
| Wheel speed motor magnetic pole number | 4 | |
| Wheel speed motor equivalent moment of inertia at load end | 10.8449 | |
| Wheel speed motor voltage constant | 317 | |
| Wheel speed motor torque constant | 2.62 | |
| Wheel speed motor permanent magnet flux linkage | 0.4366 |
| Controller Type | Overshoot (%) | Response Time (s) |
|---|---|---|
| PID | 21.13 | 0.15 |
| LADRC | 19.86 | 0.06 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, C.; Zhai, G.; Gao, Y.; Chen, C.; Zhou, J. Study on Creepage Control for PLS-160 Wheel–Rail Adhesion Test Rig Based on LADRC. Sensors 2023, 23, 1792. https://doi.org/10.3390/s23041792
Tian C, Zhai G, Gao Y, Chen C, Zhou J. Study on Creepage Control for PLS-160 Wheel–Rail Adhesion Test Rig Based on LADRC. Sensors. 2023; 23(4):1792. https://doi.org/10.3390/s23041792
Chicago/Turabian StyleTian, Chun, Gengwei Zhai, Yingqi Gao, Chao Chen, and Jiajun Zhou. 2023. "Study on Creepage Control for PLS-160 Wheel–Rail Adhesion Test Rig Based on LADRC" Sensors 23, no. 4: 1792. https://doi.org/10.3390/s23041792
APA StyleTian, C., Zhai, G., Gao, Y., Chen, C., & Zhou, J. (2023). Study on Creepage Control for PLS-160 Wheel–Rail Adhesion Test Rig Based on LADRC. Sensors, 23(4), 1792. https://doi.org/10.3390/s23041792