
Seismic Signal Analysis Based on Variational Mode Decomposition and Hilbert Transform for Ground Intrusion Activity Classification


Abstract
:1. Introduction
- The self-developed continuous seismic data acquisition sensing system is introduced into the classification research of ground intrusion activities, which provides an intrusion monitoring method with concealability and non-invasion of personal privacy.
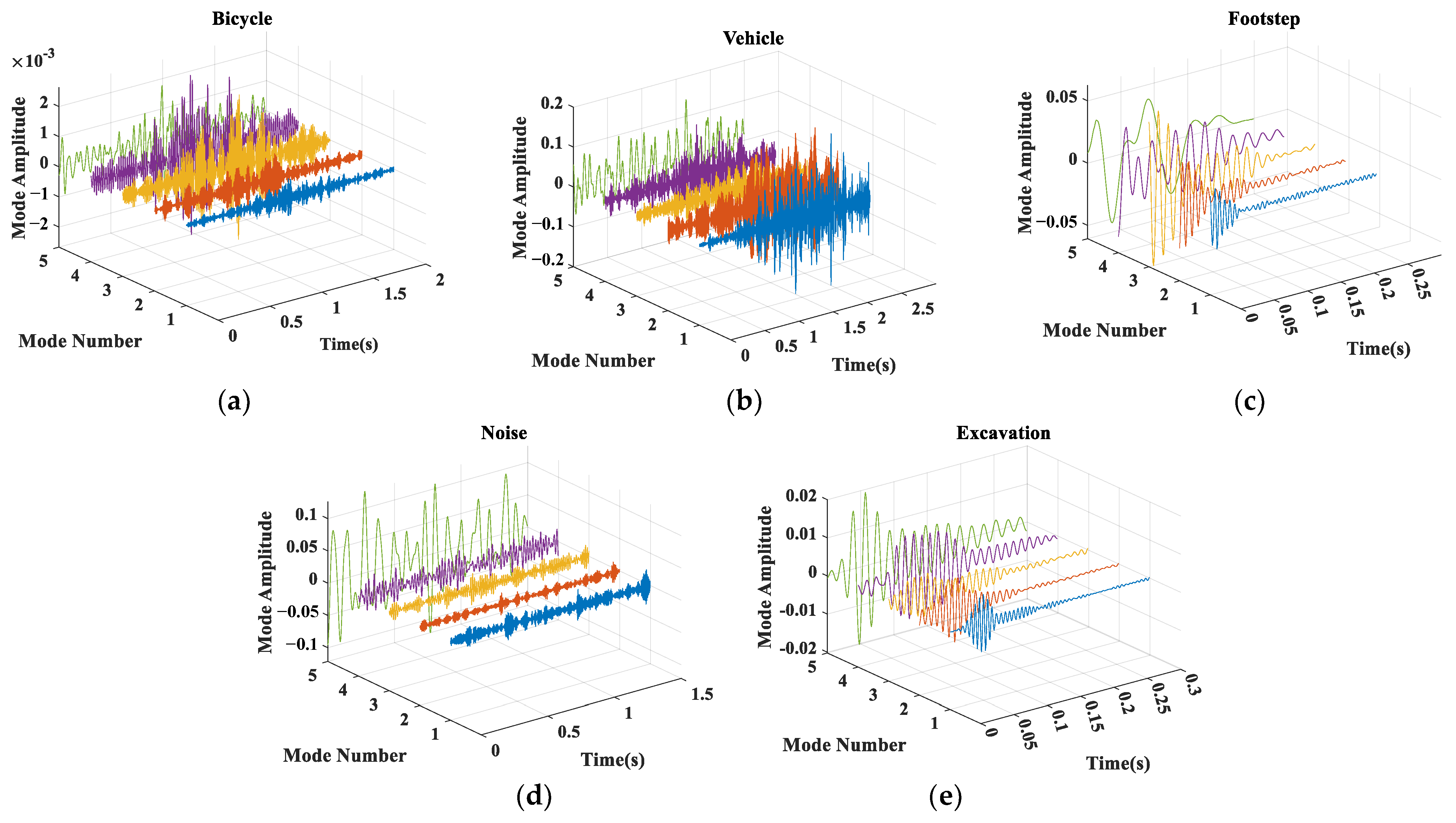
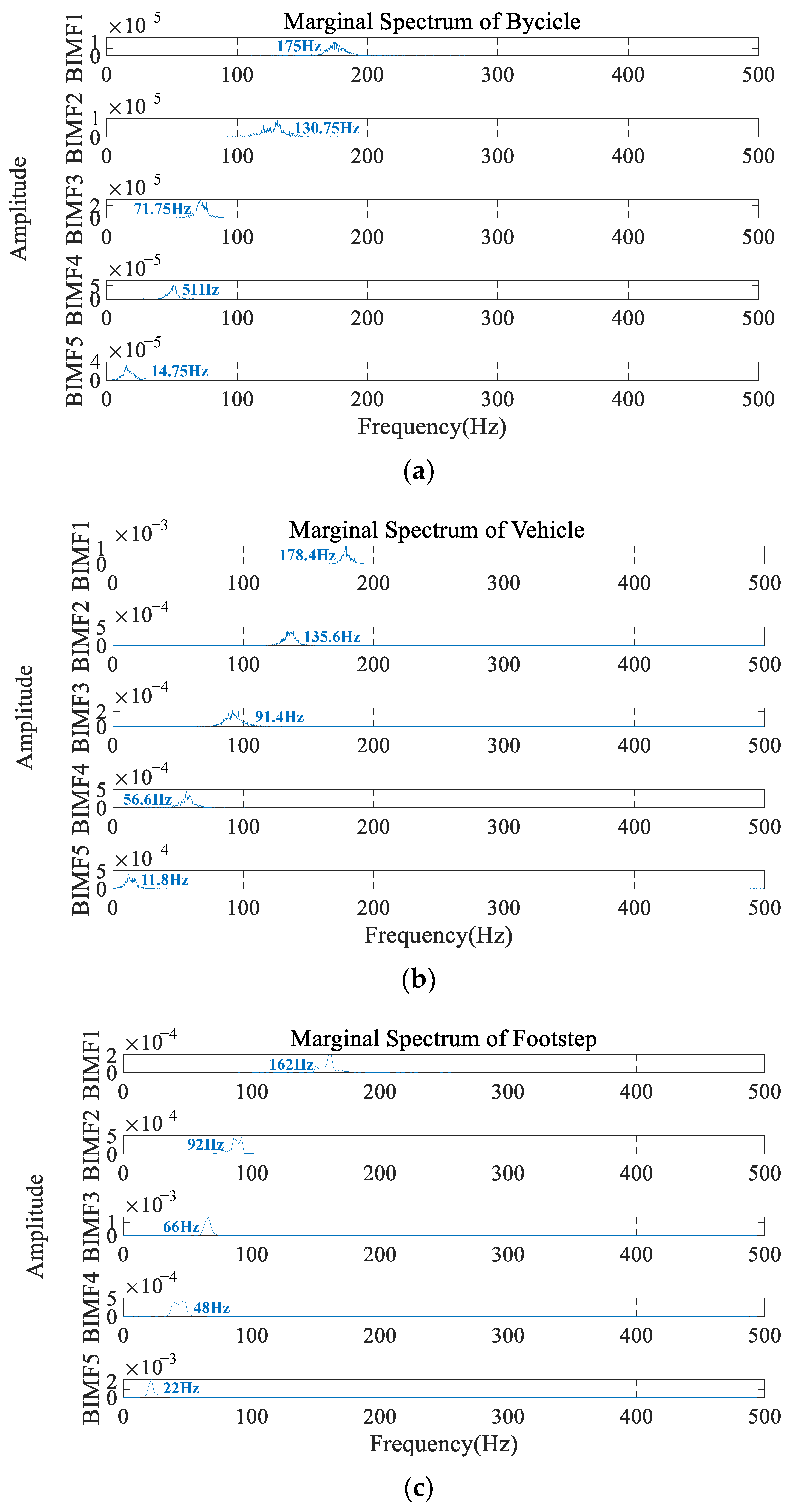
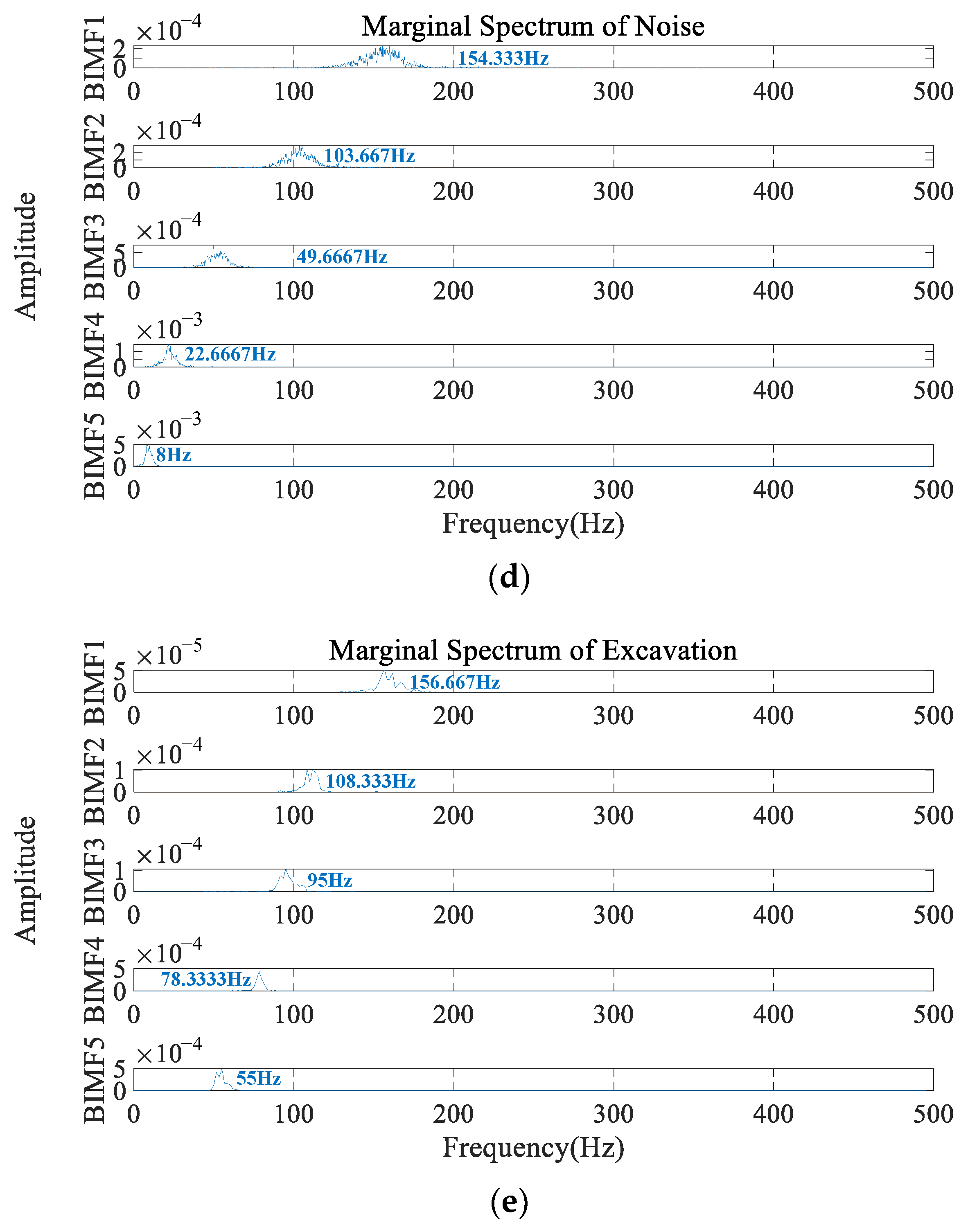
- A novel time-frequency technique combined with VMD and HT is proposed for seismic signals analysis. Three more representative features that can be further analyzed by the change rules of seismic signals are extracted, including marginal spectrum energy, marginal spectrum entropy, and marginal spectrum dominant frequency.
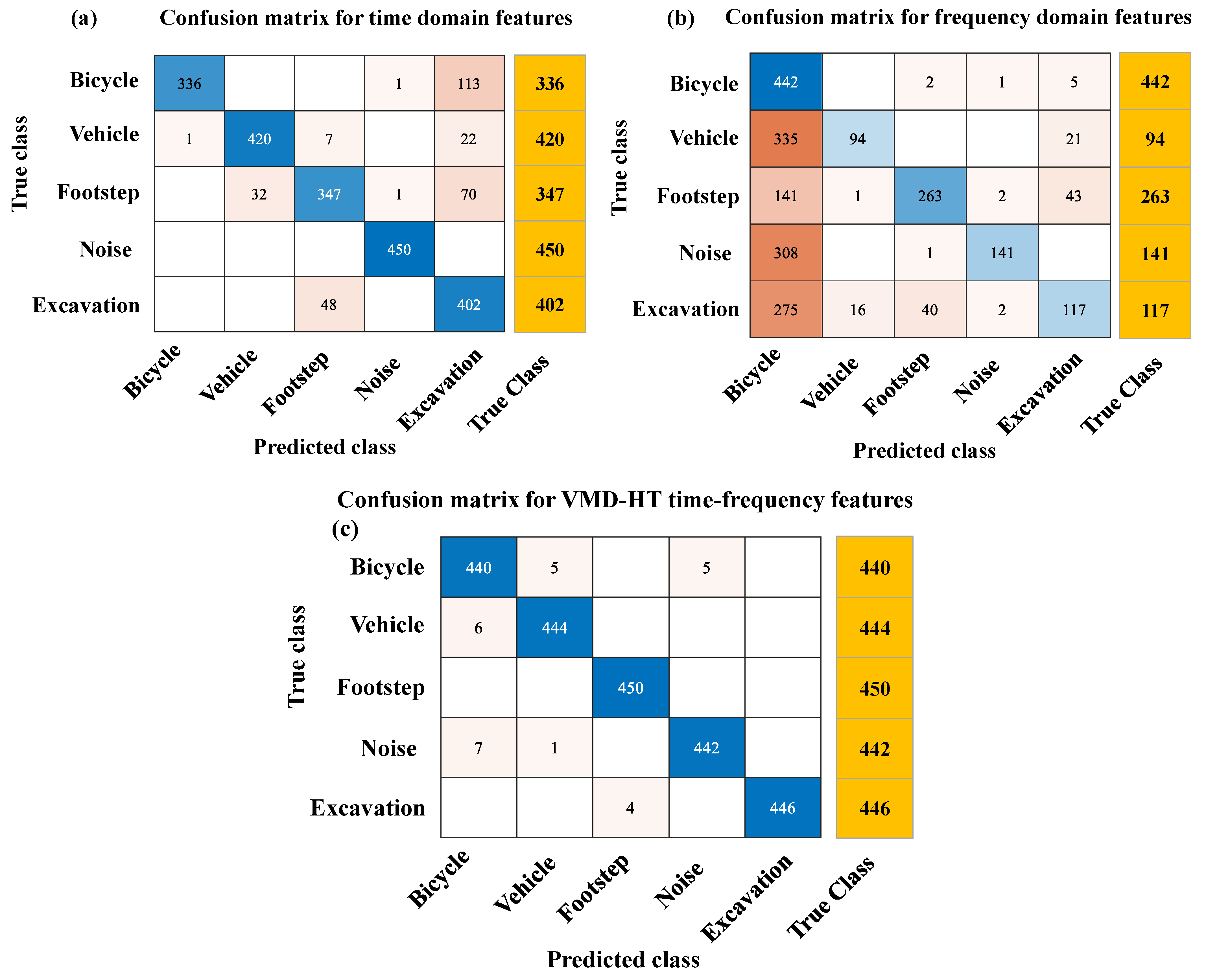
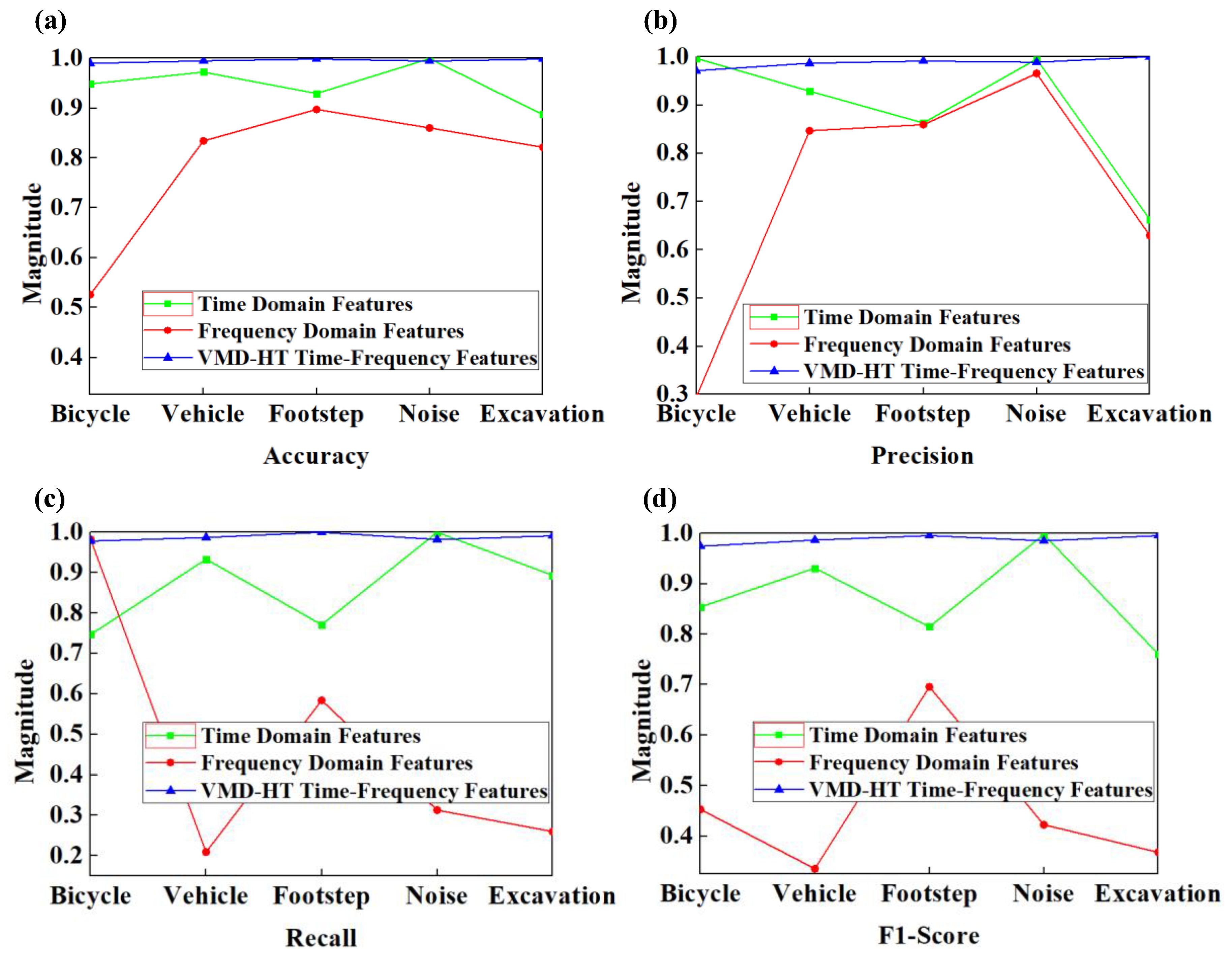
- The proposed variational mode decomposition and Hilbert transform (VMD-HT) method increases the classification accuracy, precision, recall, and F1-Score of ground intrusion signals compared with the time-domain analysis, the frequency-domain analysis, the ensemble empirical mode decomposition and Hilbert transform (EEMD-HT) time-frequency analysis, and the empirical wavelet transform and Hilbert transform (EWT-HT) time-frequency analysis method. We consider that the proposed method has broad application prospects for the classification of ground intrusion activity.
2. Methods
2.1. Dataset
2.2. Data Preprocessing
2.3. Variational Mode Decomposition
- (i)
- First, initialize , , , and .
- (ii)
- Execute Loop .
- (iii)
- Update , , and , according to Equations (7)–(9).
- (iv)
- For the given discrimination accuracy , if , then stop iteration; otherwise, return to step (ii).
2.4. Hilbert Transform
2.5. Feature Extraction
2.6. Classifier
3. Experimental Results and Analysis
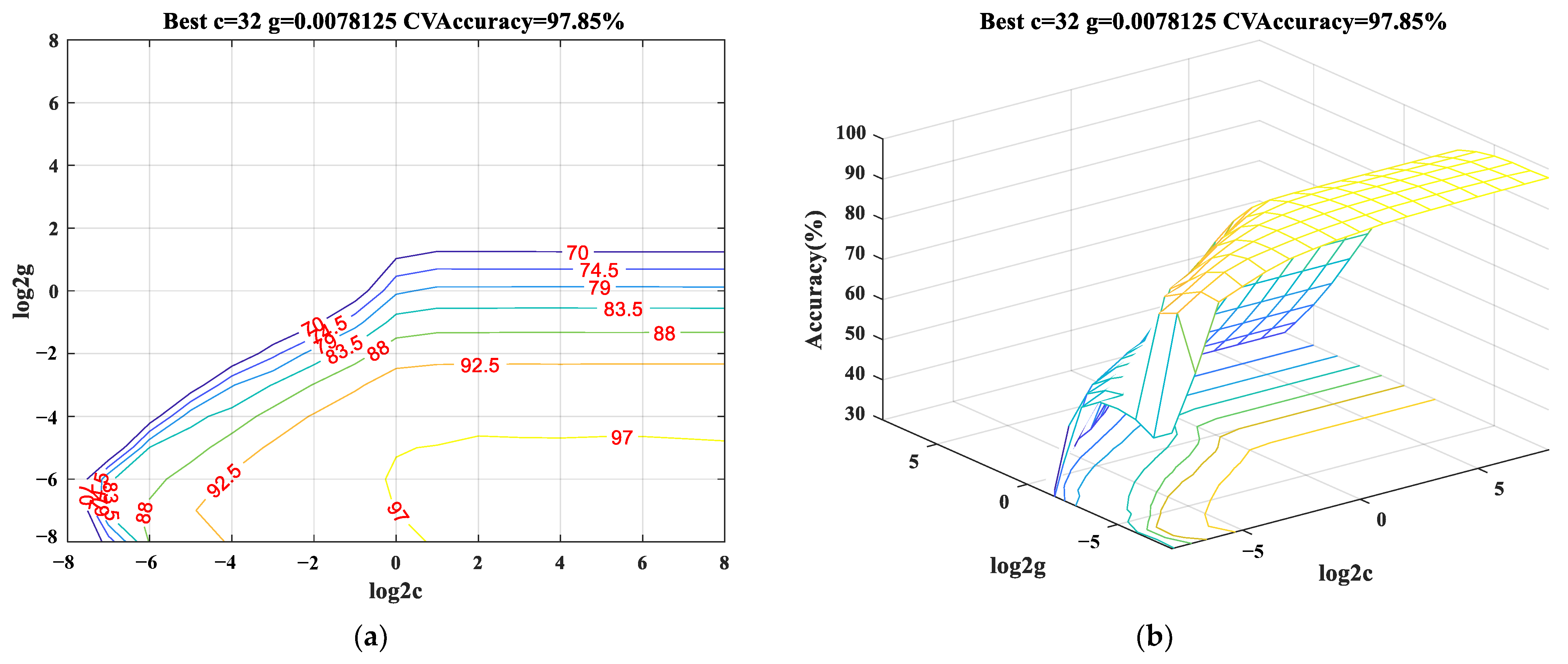
3.1. SVM Model Parameter Selection
3.2. Classification Performance of Time, Frequency, and Proposed VMD-HT Time-Frequency-Domain Features
3.3. Classification Performance Compared with EEMD-HT and EWT-HT Methods
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jianchang, A.; Junfeng, J.; Zhongyuan, X.; Wanshan, Z.; Jin, W.; Tiegen, L.; Kun, L. Design of composite intrusion detection system based on optical fiber sensor and infrared video. Infrared Laser Eng. 2020, 49, 20190446. [Google Scholar] [CrossRef]
- Yousefi, A.; Dibazar, A.A.; Berger, T.W. Intelligent fence intrusion detection system: Detection of intentional fence breaching and recognition of fence climbing. In Proceedings of the 2008 IEEE Conference on Technologies for Homeland Security, Waltham, MA, USA, 12–13 May 2008; pp. 620–625. [Google Scholar]
- Yang, A.; Liu, H.; Chen, Y.; Zhang, C.; Yang, K. Digital video intrusion intelligent detection method based on narrowband Internet of Things and its application. Image Vis. Comput. 2020, 97, 103914. [Google Scholar] [CrossRef]
- Mesa-Cantillo, C.M.; Sánchez-Rodríguez, D.; Alonso-González, I.; Quintana-Suárez, M.A.; Ley-Bosch, C.; Alonso-Hernández, J.B. A Non Intrusive Human Presence Detection Methodology Based on Channel State Information of Wi-Fi Networks. Sensors 2023, 23, 500. [Google Scholar] [CrossRef] [PubMed]
- Ushasree, A.; Datta, A.S.; Krishna, V.S.; Reddy, P.M.; Kumar, R.S. Intrusion Detection System using Machine Learning and Microwave Doppler Radar. J. Phys. Conf. Ser. 2022, 2325, 012041. [Google Scholar] [CrossRef]
- Bin, K.; Lin, J.; Tong, X.; Zhang, X.; Wang, J.; Luo, S. Moving target recognition with seismic sensing: A review. Measurement 2021, 181, 109584. [Google Scholar] [CrossRef]
- Huang, J.; Zhou, Q.; Zhang, X.; Song, E.; Li, B.; Yuan, X. Seismic target classification using a wavelet packet manifold in unattended ground sensors systems. Sensors 2013, 13, 8534–8550. [Google Scholar] [CrossRef] [Green Version]
- Mehmood, A.; Patel, V.M.; Damarla, T. Discrimination of bipeds from quadrupeds using seismic footstep signatures. In 2012 IEEE International Geoscience and Remote Sensing Symposium; IEEE: Piscataway, NJ, USA, 2012; pp. 6920–6923. [Google Scholar]
- Sarkar, S.; Damarla, T.; Ray, A. Real-time activity recognition from seismic signature via multi-scale symbolic time series analysis (MSTSA). In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 5818–5823. [Google Scholar]
- Kalra, M.; Kumar, S.; Das, B. Moving Ground Target Detection with Seismic Signal Using Smooth Pseudo Wigner–Ville Distribution. IEEE Trans. Instrum. Meas. 2020, 69, 3896–3906. [Google Scholar] [CrossRef]
- Parihar, D.; Ghosh, R.; Akula, A.; Kumar, S.; Sardana, H. Variational mode decomposition of seismic signals for detection of moving elephants. IEEE Trans. Instrum. Meas. 2022, 71, 1–8. [Google Scholar]
- Köse, E.; Hocaoğlu, A.K. A new spectral estimation-based feature extraction method for vehicle classification in distributed sensor networks. Turk. J. Electr. Eng. Comput. Sci. 2019, 27, 1120–1131. [Google Scholar] [CrossRef]
- Jin, G.; Ye, B.; Wu, Y.; Qu, F. Vehicle classification based on seismic signatures using convolutional neural network. IEEE Geosci. Remote Sens. Lett. 2018, 16, 628–632. [Google Scholar] [CrossRef]
- Lan, J.; Lan, T.; Nahavandi, S. A novel application of a microaccelerometer for target classification. IEEE Sens. J. 2004, 4, 519–524. [Google Scholar] [CrossRef]
- Bales, D.; Tarazaga, P.A.; Kasarda, M.; Batra, D.; Woolard, A.G.; Poston, J.D.; Malladi, V.S. Gender classification of walkers via underfloor accelerometer measurements. IEEE Internet Things J. 2016, 3, 1259–1266. [Google Scholar] [CrossRef]
- Pan, S.; Wang, N.; Qian, Y.; Velibeyoglu, I.; Noh, H.Y.; Zhang, P. Indoor person identification through footstep induced structural vibration. In Proceedings of the 16th International Workshop on Mobile Computing Systems and Applications, Santa Fe, NM, USA, 12–13 February 2015; pp. 81–86. [Google Scholar]
- Pan, S.; Yu, T.; Mirshekari, M.; Fagert, J.; Bonde, A.; Mengshoel, O.J.; Noh, H.Y.; Zhang, P. Footprintid: Indoor pedestrian identification through ambient structural vibration sensing. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 1–31. [Google Scholar] [CrossRef]
- Ma, C.; Zhang, H.; Lu, X.; Ji, X.; Li, T.; Fang, Y.; Yan, W.; Ran, X. A novel microseismic classification model based on bimodal neurons in an artificial neural network. Tunn. Undergr. Space Technol. 2023, 131, 104791. [Google Scholar] [CrossRef]
- Shiloh, L.; Eyal, A.; Giryes, R. Deep learning approach for processing fiber-optic DAS seismic data. In Optical Fiber Sensors; Optica Publishing Group: Washington, DC, USA, 2018; p. ThE22. [Google Scholar]
- Anchal, S.; Mukhopadhyay, B.; Kar, S. UREDT: Unsupervised learning based real-time footfall event detection technique in seismic signal. IEEE Sens. Lett. 2017, 2, 1–4. [Google Scholar] [CrossRef]
- Al-Badour, F.; Sunar, M.; Cheded, L. Vibration analysis of rotating machinery using time–frequency analysis and wavelet techniques. Mech. Syst. Signal Process. 2011, 25, 2083–2101. [Google Scholar] [CrossRef]
- Ahmadi, H.R.; Mahdavi, N.; Bayat, M. A Novel Damage Identification Method Based on Short Time Fourier Transform and a New Efficient Index, Structures; Elsevier: Amsterdam, The Netherlands, 2021; pp. 3605–3614. [Google Scholar]
- Guo, Y.; Jiang, S.; Yang, Y.; Jin, X.; Wei, Y. Gearbox fault diagnosis based on improved variational mode extraction. Sensors 2022, 22, 1779. [Google Scholar] [CrossRef] [PubMed]
- Lan, J.; Shi, Y. Vehicle detection and recognition based on a MEMS magnetic sensor. In Proceedings of the 4th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Shenzhen, China, 5–8 January 2009; pp. 404–408. [Google Scholar]
- Jin, X.; Sarkar, S.; Ray, A.; Gupta, S.; Damarla, T. Target detection and classification using seismic and PIR sensors. IEEE Sens. J. 2011, 12, 1709–1718. [Google Scholar] [CrossRef] [Green Version]
- Kalra, M.; Kumar, S.; Das, B. Seismic Signal Analysis Using Empirical Wavelet Transform for Moving Ground Target Detection and Classification. IEEE Sens. J. 2020, 20, 7886–7895. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Liu, K.; Tian, M.; Liu, T.; Jiang, J.; Ding, Z.; Chen, Q.; Ma, C.; He, C.; Hu, H.; Zhang, X. A high-efficiency multiple events discrimination method in optical fiber perimeter security system. J. Light. Technol. 2015, 33, 4885–4890. [Google Scholar]
- Liu, Z.; Mohiuddin, G.; Zheng, J.; Asim, M.; Wang, S. Intrusion detection in wireless sensor network using enhanced empirical based component analysis. Future Gener. Comput. Syst. 2022, 135, 181–193. [Google Scholar]
- Qu, H.Q.; Gong, D.J.; Zhang, C.N. Feature Extraction and Recognition Algorithm for Fiber Intrusion Signals. Laser Optoelectron. Prog. 2019, 56, 130601. [Google Scholar]
- Zosso, D.; Dragomiretskiy, K. Variational Mode Decomposition. In IEEE Transactions on Signal Processing: A Publication of the IEEE Signal Processing Society; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- Miao, Q.; Shu, Q.; Wu, B.; Sun, X.; Song, K. A Modified Complex Variational Mode Decomposition Method for Analyzing Nonstationary Signals with the Low-Frequency Trend. Sensors 2022, 22, 1801. [Google Scholar] [CrossRef] [PubMed]
- An, X.; Yang, J. Denoising of hydropower unit vibration signal based on variational mode decomposition and approximate entropy. Trans. Inst. Meas. Control. 2016, 38, 282–292. [Google Scholar] [CrossRef]
- He, X.; Zhou, X.; Yu, W.; Hou, Y.; Mechefske, C.K. Adaptive variational mode decomposition and its application to multi-fault detection using mechanical vibration signals. ISA Trans. 2021, 111, 360–375. [Google Scholar] [CrossRef]
- Leng, J.; Yu, Z.; Wu, C. Enhanced Discrimination of Seismic Geological Channels Based on Multi-Trace Variational Mode Decomposition. Appl. Sci. 2022, 12, 5416. [Google Scholar] [CrossRef]
- Ni, P.; Li, J.; Hao, H.; Xia, Y.; Wang, X.; Lee, J.M.; Jung, K.H. Time--varying system identification using variational mode decomposition. Struct. Control. Health Monit. 2018, 25, e2175. [Google Scholar] [CrossRef]
- Civera, M.; Surace, C. A comparative analysis of signal decomposition techniques for structural health monitoring on an experimental benchmark. Sensors 2021, 21, 1825. [Google Scholar] [CrossRef]
- Li, H.; Wang, G.; Wei, B.; Liu, H.; Huang, W. Improved variational mode decomposition method for vibration signal processing of flood discharge structure. J. Vib. Control. 2022, 28, 2556–2569. [Google Scholar] [CrossRef]
- Xia, S.; Yang, J.; Cai, W.; Zhang, C.; Hua, L.; Zhou, Z. Adaptive complex variational mode decomposition for micro-motion signal processing applications. Sensors 2021, 21, 1637. [Google Scholar] [CrossRef]
- Nsaif, Y.M.; Hossain Lipu, M.S.; Hussain, A.; Ayob, A.; Yusof, Y.; Zainuri, M.A.A. A Novel Fault Detection and Classification Strategy for Photovoltaic Distribution Network Using Improved Hilbert–Huang Transform and Ensemble Learning Technique. Sustainability 2022, 14, 11749. [Google Scholar] [CrossRef]
- Shen, S.; Zheng, J.; Sun, Y.; Teng, X.; Peng, S. A Continuous Data Acquisition System for Three-Component Surface Microseismic Real-Time Monitoring. IEEE Sens. J. 2022, 22, 20635–20644. [Google Scholar] [CrossRef]
- Zheng, J.; Yuan, Y.; Zou, L.; Deng, W.; Guo, C.; Zhao, H. Study on a Novel Fault Diagnosis Method Based on VMD and BLM. Symmetry 2019, 11, 747. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Cheng, G.; Chen, X.; Pang, Y. Planetary gears feature extraction and fault diagnosis method based on VMD and CNN. Sensors 2018, 18, 1523. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Wang, W.; Han, Q.; Liu, X. Damage pattern recognition and damage evolution analysis of unidirectional CFRP tendons under tensile loading using acoustic emission technology. Compos. Struct. 2020, 238, 111948. [Google Scholar] [CrossRef]
- Jero, S.E.; Ramakrishnan, S. Analysis of muscle fatigue conditions in surface EMG signal with a novel Hilbert marginal spectrum entropy method. In Proceedings of the 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 2675–2678. [Google Scholar]
- Donghao, J.; Yu, L.; Wanda, Z.; Chunhua, Z. Extraction of noise feature and classification of underwater targets based on variational mode decomposition algorithm. Tech. Acoust. 2021, 40, 181–187. [Google Scholar]
- Cortes, C.; Vapnik, V. Support vector machine. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Schuldt, C.; Laptev, I.; Caputo, B. Recognizing human actions: A local SVM approach. In Proceedings of the 17th International Conference on Pattern Recognition, Cambridge, UK, 26 August 2004; pp. 32–36. [Google Scholar]
- Indi, M.W.P.; Novianty, A.; Prasasti, A.L. Automatic first arrival picking on P-wave seismic signal using support vector machine method. In Proceedings of the 8th International Conference on Information and Communication Technology (ICoICT), Yogyakarta, Indonesia, 24–26 June 2020; pp. 1–6. [Google Scholar]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Tang, Y.; Gu, L.; Wang, L. Deep stacking network for intrusion detection. Sensors 2021, 22, 25. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bicycle | Vehicle | Footstep | Noise | Excavation | |
|---|---|---|---|---|---|
| Accuracy | 25.25% | 9.14% | 8.44% | 6.45% | 14.38% |
| Precision | 32.56% | 9.87% | 12.99% | 0.81% | 35.26% |
| Recall | 11.36% | 41.59% | 32.25% | 32.55% | 41.44% |
| F1-Score | 32.11% | 35.36% | 24.06% | 27.51% | 43.13% |
| Accuracy | Precision | Recall | F1-Score | |
|---|---|---|---|---|
| Time-Domain Features | 94.76% | 88.95% | 86.89% | 87.16% |
| Frequency-Domain Features | 78.79% | 71.91% | 46.96% | 45.49% |
| VMD-HT Time-Frequency Features | 99.50% | 98.76% | 98.76% | 98.75% |
| Bicycle | Vehicle | Footstep | Noise | Excavation | |
|---|---|---|---|---|---|
| Accuracy | 0.98% | 1.63% | 1.91% | 2.91% | 2.58% |
| Precision | 0.68% | 5.82% | 7.65% | 4.41% | 6.03% |
| Recall | 4.35% | 1.90% | 0.45% | 10.50% | 7.75% |
| F1-Score | 2.54% | 3.94% | 4.37% | 7.58% | 11.09% |
| Accuracy | Precision | Recall | F1-Score | |
|---|---|---|---|---|
| EEMD-HT Time-Frequency method | 98.58% | 96.55% | 96.46% | 96.45% |
| EWT-HT Time-Frequency method | 96.43% | 87.95% | 91.08% | 89.27% |
| VMD-HT Time-Frequency method | 99.50% | 98.76% | 98.76% | 98.75% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Qian, D.; Zheng, J.; Liu, Y.; Liu, C. Seismic Signal Analysis Based on Variational Mode Decomposition and Hilbert Transform for Ground Intrusion Activity Classification. Sensors 2023, 23, 3674. https://doi.org/10.3390/s23073674
Sun Y, Qian D, Zheng J, Liu Y, Liu C. Seismic Signal Analysis Based on Variational Mode Decomposition and Hilbert Transform for Ground Intrusion Activity Classification. Sensors. 2023; 23(7):3674. https://doi.org/10.3390/s23073674
Chicago/Turabian StyleSun, Yuan, Dongdong Qian, Jing Zheng, Yuting Liu, and Cen Liu. 2023. "Seismic Signal Analysis Based on Variational Mode Decomposition and Hilbert Transform for Ground Intrusion Activity Classification" Sensors 23, no. 7: 3674. https://doi.org/10.3390/s23073674
APA StyleSun, Y., Qian, D., Zheng, J., Liu, Y., & Liu, C. (2023). Seismic Signal Analysis Based on Variational Mode Decomposition and Hilbert Transform for Ground Intrusion Activity Classification. Sensors, 23(7), 3674. https://doi.org/10.3390/s23073674