
A Mixed-Reality-Based Unknown Space Navigation Method of a Flexible Manipulator


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
3. System Design
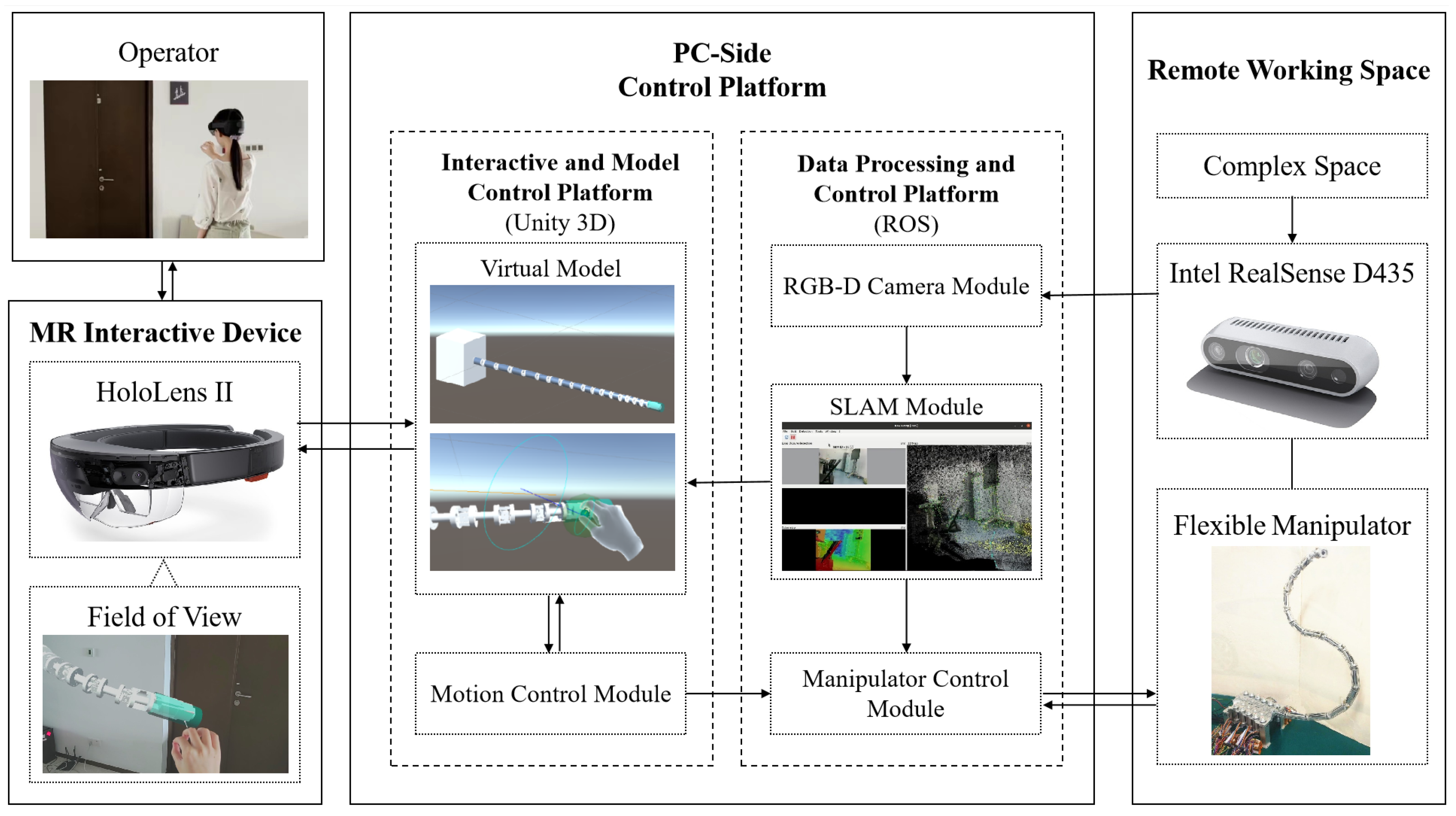
3.1. System Architecture
- The interactive and model control platform is based on Unity 3D, a software tool for 3D model rendering and MR-based application development. The mixed reality toolkit (MRTK) is used to reconstruct the remote workspace and create the MR-based interface. A stable connection between the platform and HoloLens is established via TCP/IP. Additionally, the platform has a motion control module that performs kinematic algorithms, path-finding, and obstacle avoidance algorithms to obtain new joint angles that are within safe limits. The updated calculation result is then transmitted to the virtual model and the manipulator control module.
- The data processing and control platform is based on the robot operating system (ROS). Unity 3D cannot control the remote hardware directly; therefore, ROS is applied. ROS organizes multiple modules. The RGB-D camera module is responsible for collecting environmental data; the SLAM module performs 3D model reconstruction based on the data collected; the manipulator control module is used for remote hardware control. The information exchange between Unity 3D and ROS is based on the WebSocket protocol.
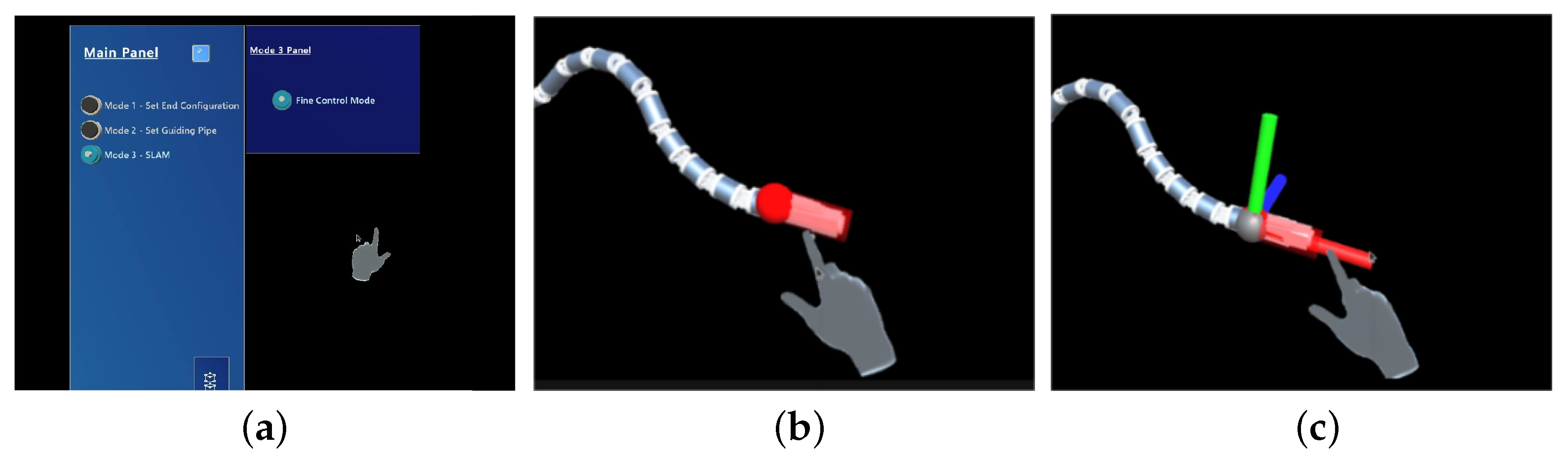
3.2. MR-Based Interface
4. Method
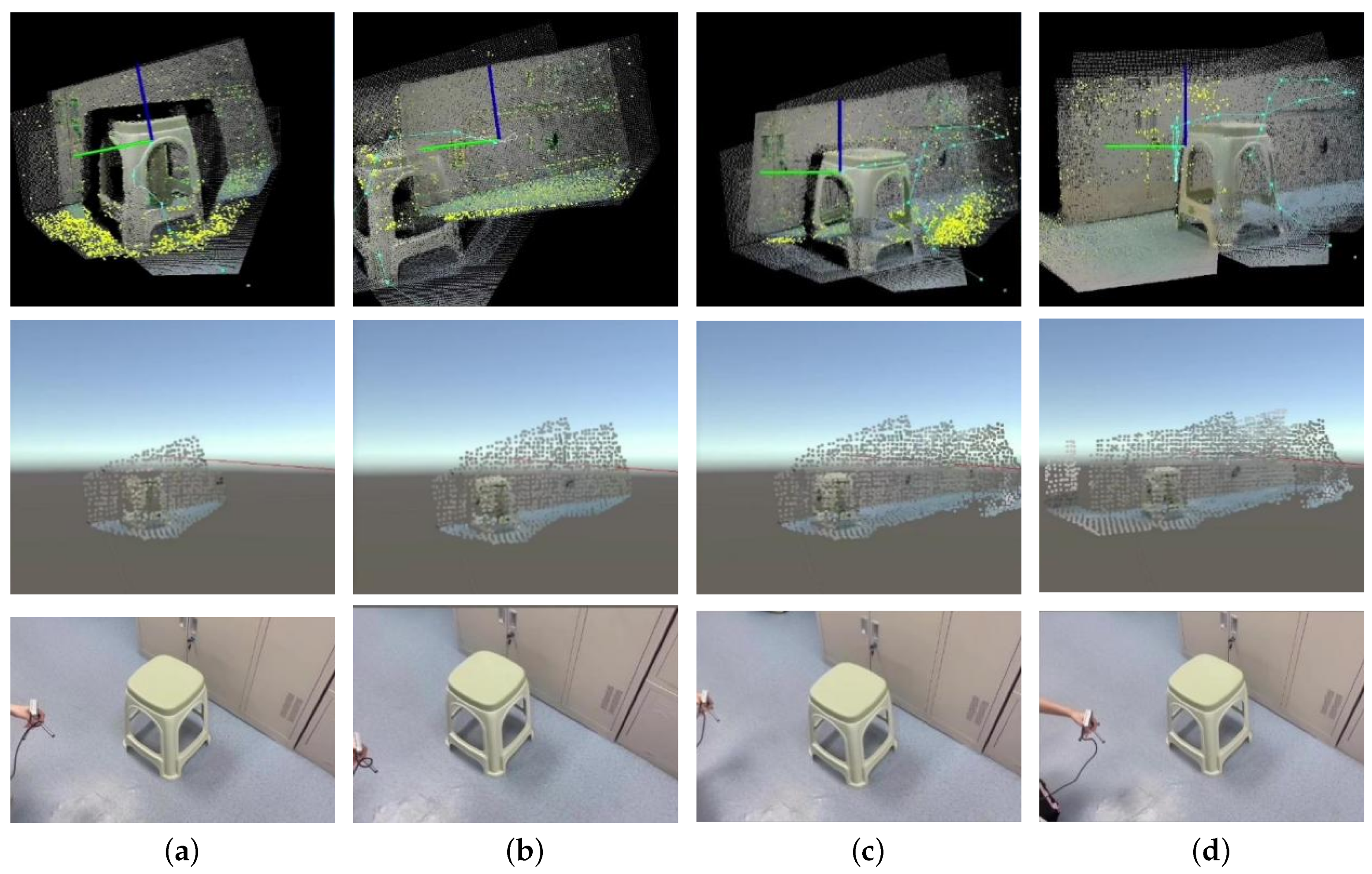
4.1. SLAM and 3D Reconstruction
4.1.1. SLAM
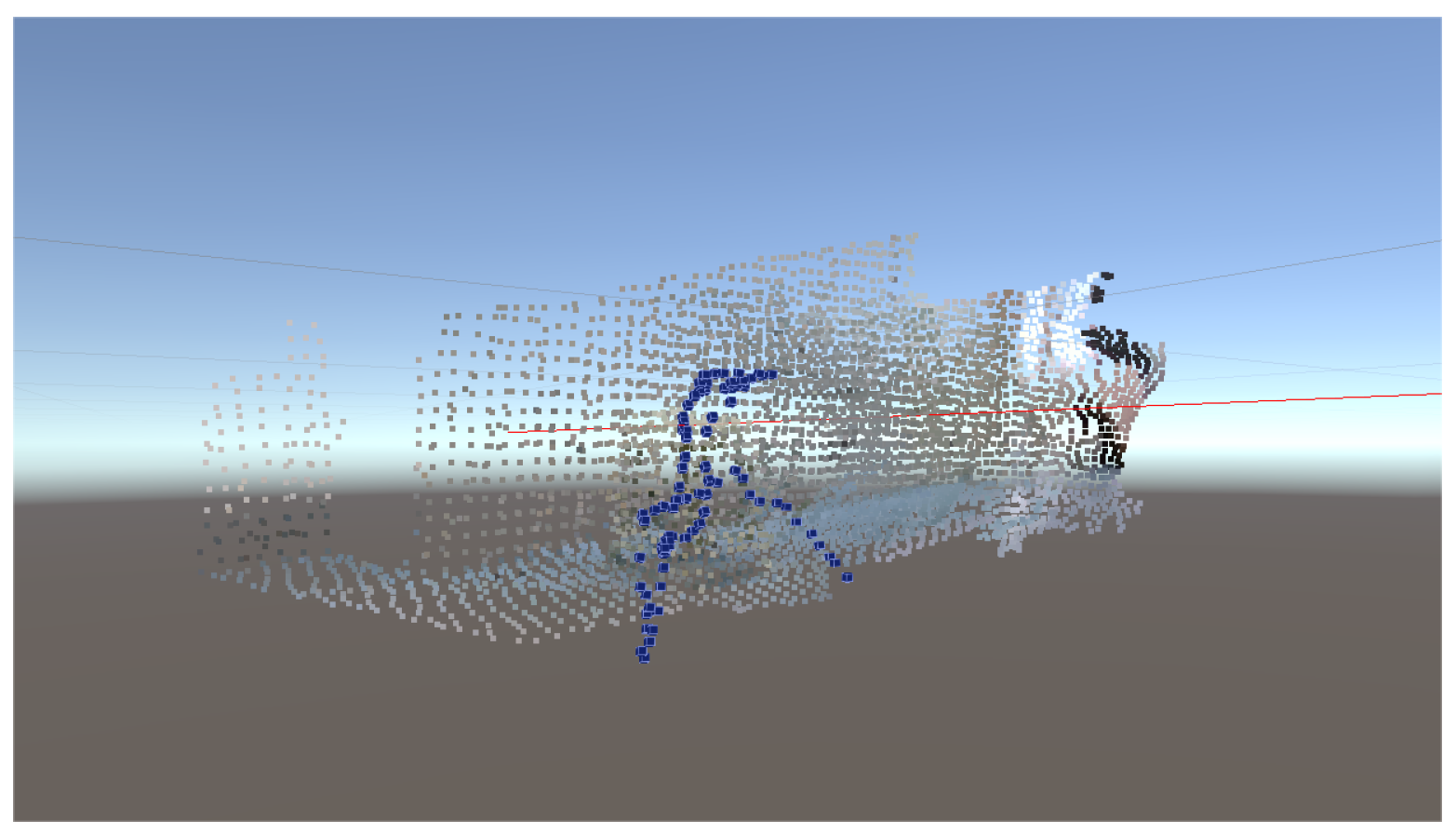
4.1.2. 3D Reconstruction of the Environment
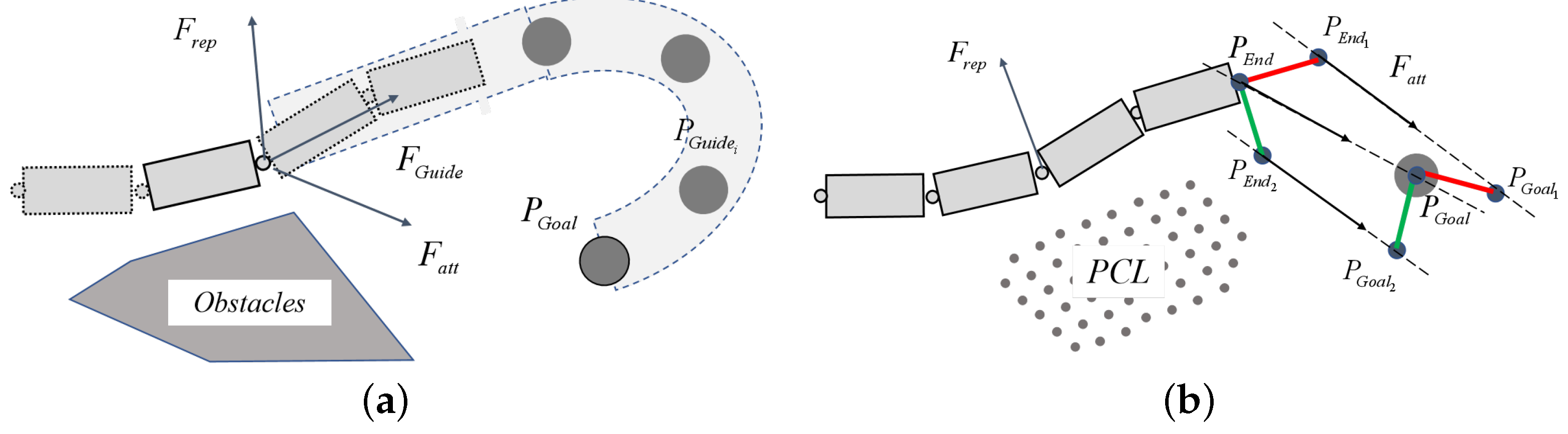
4.2. Motion Control
Path-Finding and Obstacle Avoidance Method
5. Evaluation Results
5.1. SLAM and 3D Reconstruction Simulation
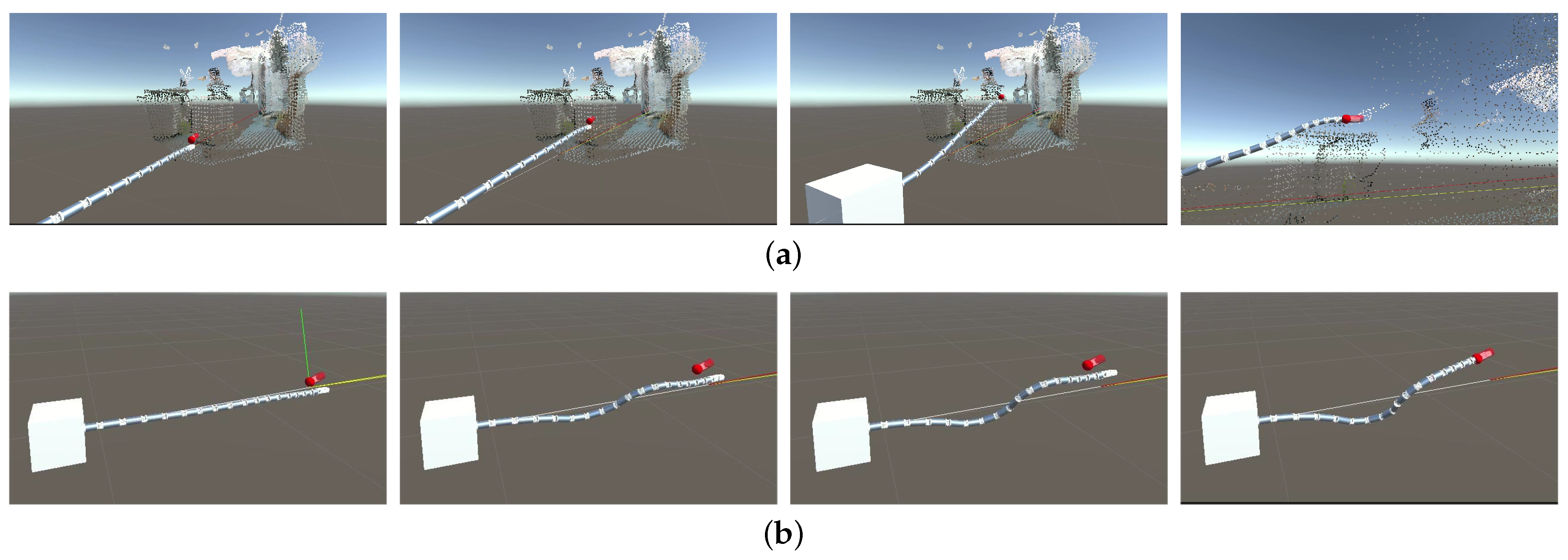
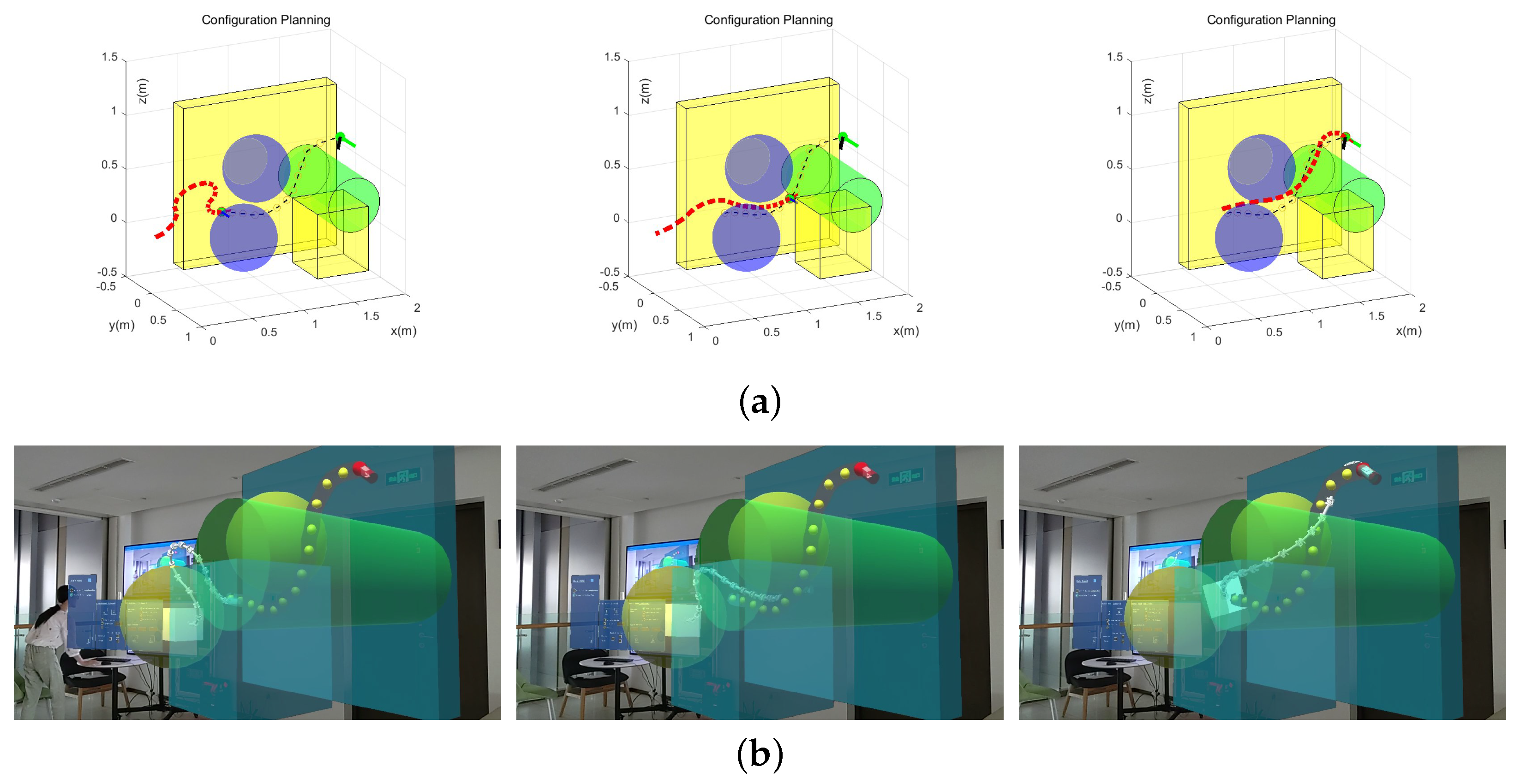
5.2. Configuration Planning Simulation
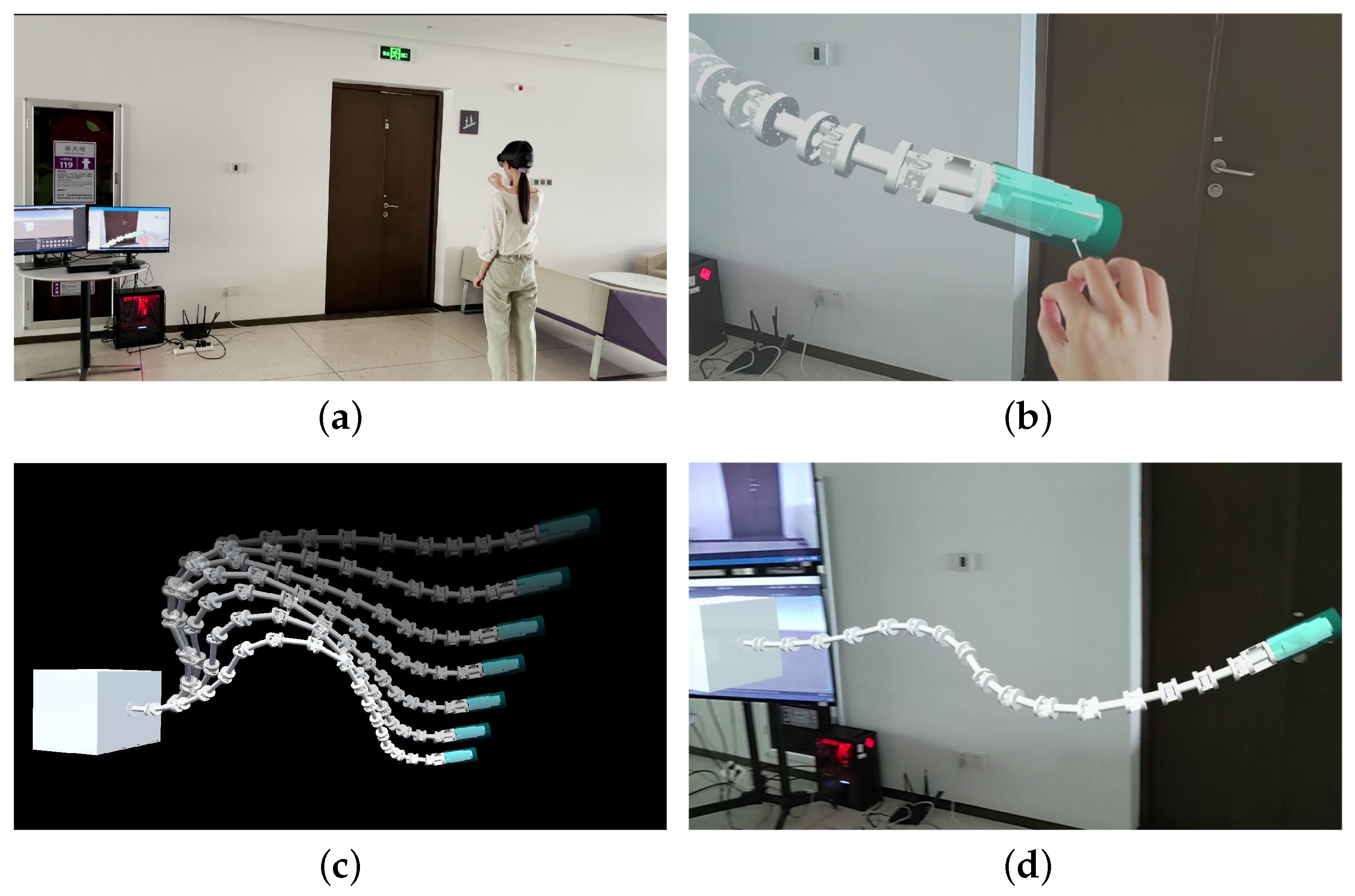
5.3. MR-Based Teleoperation Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DoF | degree of freedom |
| VR | virtual reality |
| AR | augmented reality |
| MR | mixed reality |
| HMD | head-mounted display |
| SLAM | simultaneous localization and mapping |
| APF | artificial potential field |
| VGP | virtual guiding pipelines |
| PC | personal computer |
| MRTK | mixed reality toolkit |
| ROS | robot operating system |
| LTM | long-term memory |
| WM | working memory |
| PCL | point cloud |
References
- Moran, M.E. Evolution of robotic arms. J. Robot. Surg. 2007, 1, 103–111. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Su, H.; Schmirander, Y.; Li, Z.; Zhou, X.; Ferrigno, G.; De Momi, E. Bilateral teleoperation control of a redundant manipulator with an rcm kinematic constraint. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 4477–4482. [Google Scholar]
- Hokayem, P.F.; Spong, M.W. Bilateral teleoperation: An historical survey. Automatica 2006, 42, 2035–2057. [Google Scholar] [CrossRef]
- Chen, J.Y.; Haas, E.C.; Barnes, M.J. Human performance issues and user interface design for teleoperated robots. IEEE Trans. Syst. Man, Cybern. Part C Appl. Rev. 2007, 37, 1231–1245. [Google Scholar] [CrossRef]
- Andrew, A.M. Virtual Reality: Exploring the Brave New Technologies of Artificial Experience and Interactive Worlds from Cyberspace to Teledildontics by Howard Rheingold Seeker and Warburg, London, 1991, Hard cover, 415 pp.(£ 16.99). Robotica 1992, 10, 278–279. [Google Scholar] [CrossRef]
- Martín-Barrio, A.; Roldán, J.J.; Terrile, S.; del Cerro, J.; Barrientos, A. Application of immersive technologies and natural language to hyper-redundant robot teleoperation. Virtual Real. 2020, 24, 541–555. [Google Scholar] [CrossRef]
- Bogue, R. Robots in the nuclear industry: A review of technologies and applications. Ind. Robot. Int. J. 2011, 38, 2. [Google Scholar] [CrossRef]
- Buckingham, R.; Graham, A. Nuclear snake-arm robots. Ind. Robot. Int. J. 2012, 39, 1. [Google Scholar] [CrossRef]
- Mohammad, A.; Russo, M.; Fang, Y.; Dong, X.; Axinte, D.; Kell, J. An efficient follow-the-leader strategy for continuum robot navigation and coiling. IEEE Robot. Autom. Lett. 2021, 6, 7493–7500. [Google Scholar] [CrossRef]
- Sverdrup-Thygeson, J.; Kelasidi, E.; Pettersen, K.Y.; Gravdahl, J.T. Modeling of underwater swimming manipulators. IFAC-PapersOnLine 2016, 49, 81–88. [Google Scholar] [CrossRef]
- Tang, J.; Zhang, Y.; Huang, F.; Li, J.; Chen, Z.; Song, W.; Zhu, S.; Gu, J. Design and kinematic control of the cable-driven hyper-redundant manipulator for potential underwater applications. Appl. Sci. 2019, 9, 1142. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.J.; Cheng, S.; Kim, S.; Iagnemma, K. A stiffness-adjustable hyperredundant manipulator using a variable neutral-line mechanism for minimally invasive surgery. IEEE Trans. Robot. 2013, 30, 382–395. [Google Scholar] [CrossRef] [Green Version]
- Burgner-Kahrs, J.; Rucker, D.C.; Choset, H. Continuum robots for medical applications: A survey. IEEE Trans. Robot. 2015, 31, 1261–1280. [Google Scholar] [CrossRef]
- Jia, Q.X.; Qiang, Z.; Sun, H.X.; Lei, H. Implementation and kinematic control of a hyper-redundant mobile manipulator System. Chin. J. Aeronaut. 2006, 19, 83–88. [Google Scholar] [CrossRef] [Green Version]
- Hedayati, H.; Walker, M.; Szafir, D. Improving collocated robot teleoperation with augmented reality. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 78–86. [Google Scholar]
- Sun, D.; Kiselev, A.; Liao, Q.; Stoyanov, T.; Loutfi, A. A new mixed-reality-based teleoperation system for telepresence and maneuverability enhancement. IEEE Trans.-Hum.-Mach. Syst. 2020, 50, 55–67. [Google Scholar] [CrossRef] [Green Version]
- Martín-Barrio, A.; Roldán-Gómez, J.J.; Rodríguez, I.; Del Cerro, J.; Barrientos, A. Design of a hyper-redundant robot and teleoperation using mixed reality for inspection tasks. Sensors 2020, 20, 2181. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Newcombe, R.A.; Izadi, S.; Hilliges, O.; Molyneaux, D.; Kim, D.; Davison, A.J.; Kohi, P.; Shotton, J.; Hodges, S.; Fitzgibbon, A. Kinectfusion: Real-time dense surface mapping and tracking. In Proceedings of the 2011 10th IEEE International Symposium on Mixed and Augmented Reality, Basel, Switzerland, 26–29 October 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 127–136. [Google Scholar]
- Whelan, T.; Leutenegger, S.; Salas-Moreno, R.; Glocker, B.; Davison, A. ElasticFusion: Dense SLAM without a pose graph. In Proceedings of the Robotics: Science and Systems 2015, Rome, Italy, 13–17 July 2015. [Google Scholar]
- Whelan, T.; Kaess, M.; Fallon, M.; Johannsson, H.; Leonard, J.; McDonald, J. Kintinuous: Spatially Extended Kinectfusion; Massachusetts Institute of Technology (MIT): Cambridge, MA, USA, 2012. [Google Scholar]
- Endres, F.; Hess, J.; Sturm, J.; Cremers, D.; Burgard, W. 3-D mapping with an RGB-D camera. IEEE Trans. Robot. 2013, 30, 177–187. [Google Scholar] [CrossRef]
- Labbe, M.; Michaud, F. Appearance-based loop closure detection for online large-scale and long-term operation. IEEE Trans. Robot. 2013, 29, 734–745. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Wang, C.C.; Kumar, V.; Chiu, G.M. A motion control and obstacle avoidance algorithm for hyper-redundant manipulators. In Proceedings of the 1998 International Symposium on Underwater Technology, Rostock, Germany, 13–15 August 1998; IEEE: Piscataway, NJ, USA, 1998; pp. 466–471. [Google Scholar]
- Wang, W.; Gu, J.; Zhu, M.; Huo, Q.; He, S.; Xu, Z. An obstacle avoidance method for redundant manipulators based on artificial potential field. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 2151–2156. [Google Scholar]
- Wang, W.; Zhu, M.; Wang, X.; He, S.; He, J.; Xu, Z. An improved artificial potential field method of trajectory planning and obstacle avoidance for redundant manipulators. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418799562. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Zhu, X.; Meng, D.; Wang, X.; Liang, B. An overall configuration planning method of continuum hyper-redundant manipulators based on improved artificial potential field method. IEEE Robot. Autom. Lett. 2021, 6, 4867–4874. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, R.; Zhu, X.; Chen, Z.; Tian, Y.; Liang, L.; Wang, X. A Mixed-Reality-Based Unknown Space Navigation Method of a Flexible Manipulator. Sensors 2023, 23, 3840. https://doi.org/10.3390/s23083840
Chen R, Zhu X, Chen Z, Tian Y, Liang L, Wang X. A Mixed-Reality-Based Unknown Space Navigation Method of a Flexible Manipulator. Sensors. 2023; 23(8):3840. https://doi.org/10.3390/s23083840
Chicago/Turabian StyleChen, Ronghui, Xiaojun Zhu, Zhang Chen, Yu Tian, Lunfei Liang, and Xueqian Wang. 2023. "A Mixed-Reality-Based Unknown Space Navigation Method of a Flexible Manipulator" Sensors 23, no. 8: 3840. https://doi.org/10.3390/s23083840
APA StyleChen, R., Zhu, X., Chen, Z., Tian, Y., Liang, L., & Wang, X. (2023). A Mixed-Reality-Based Unknown Space Navigation Method of a Flexible Manipulator. Sensors, 23(8), 3840. https://doi.org/10.3390/s23083840