
Damage Quantification and Identification in Structural Joints through Ultrasonic Guided Wave-Based Features and an Inverse Bayesian Scheme

 , , and
, , and 
Abstract
:1. Introduction
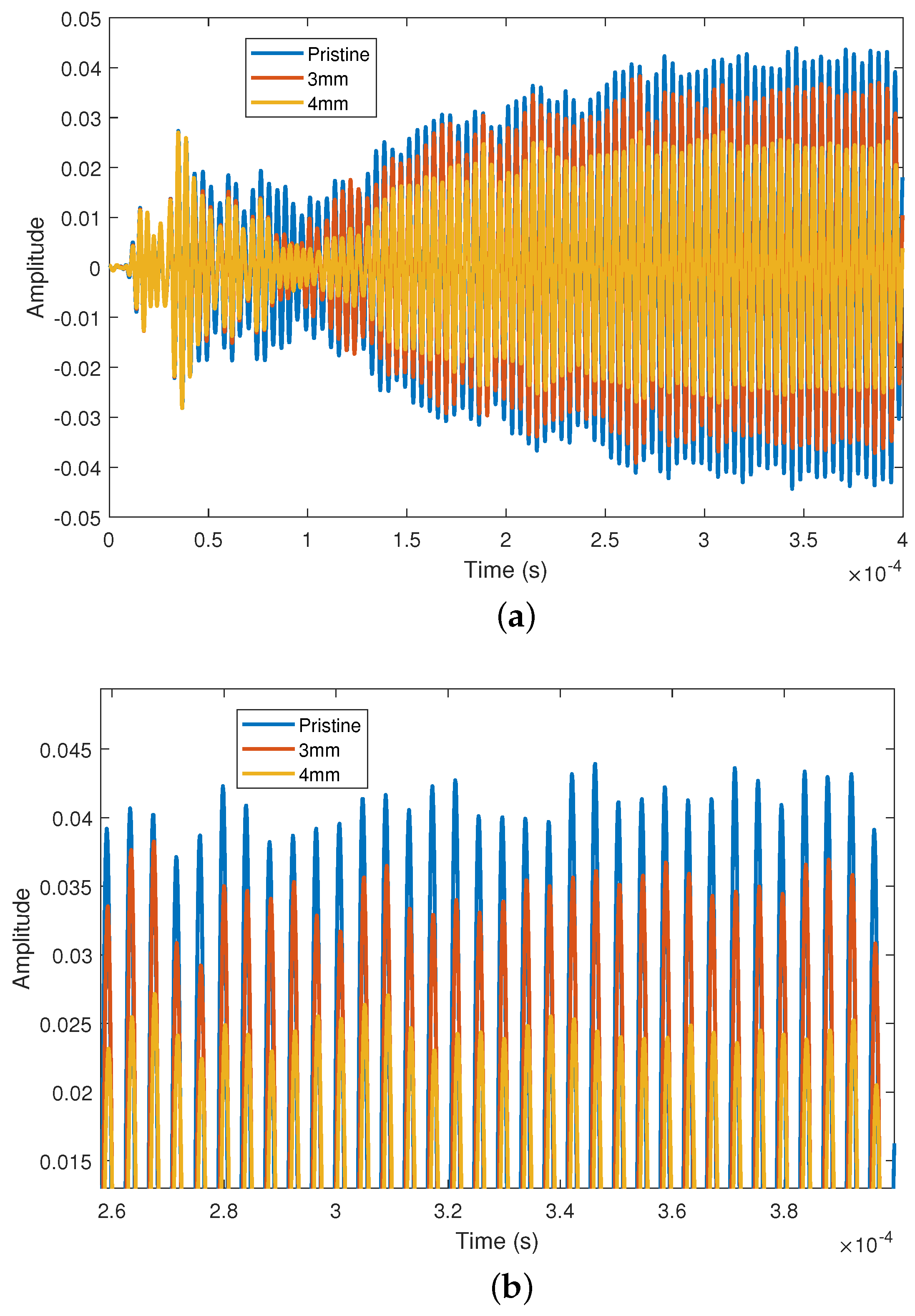
2. Guided Wave Monitoring Testing of Joints and Damage Feature Extraction
3. Method
3.1. Outline of Bayesian Inference
3.2. Numerical Calculation of Ultrasound Scattering for Systems Involving Beam Connections and Solid Joints of Arbitrary Complexity
3.2.1. Wave Propagation in Beam Connections
3.2.2. Calculation of Scattering Coefficients of Arbitrary Joints
3.3. Kriging Surrogate Model with WFE
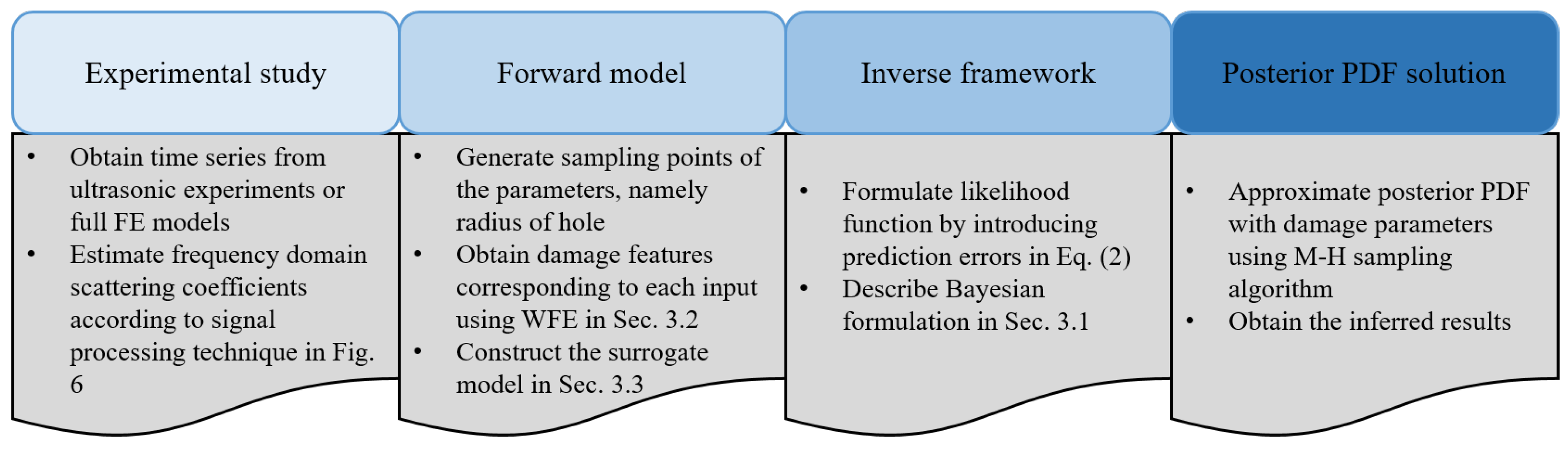
3.4. Workflow of the Proposed Framework
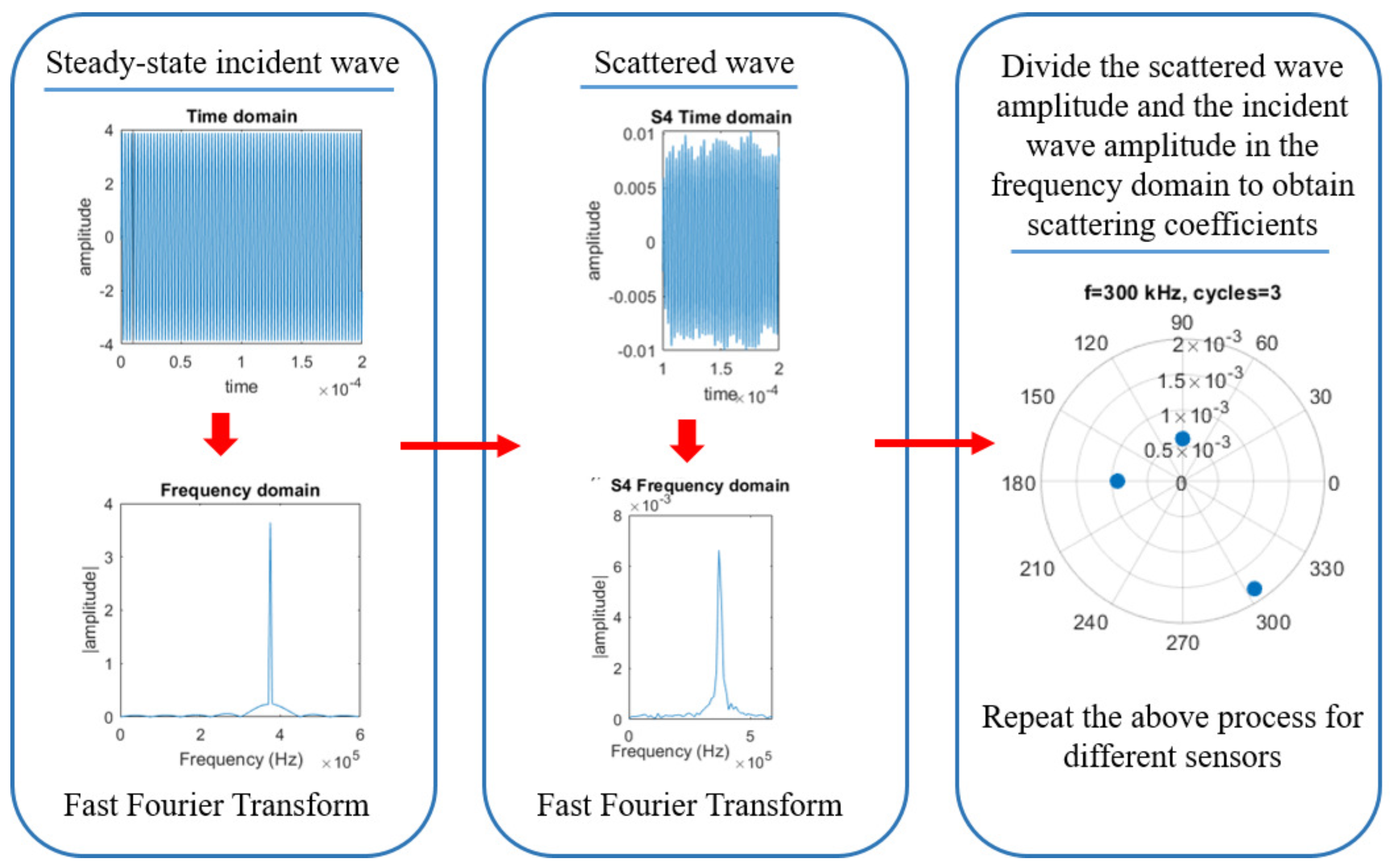
- Obtain the scattering coefficients for joints from ultrasonic guided wave measurements or FE model (according to the signal processing procedure provided in Figure 6).
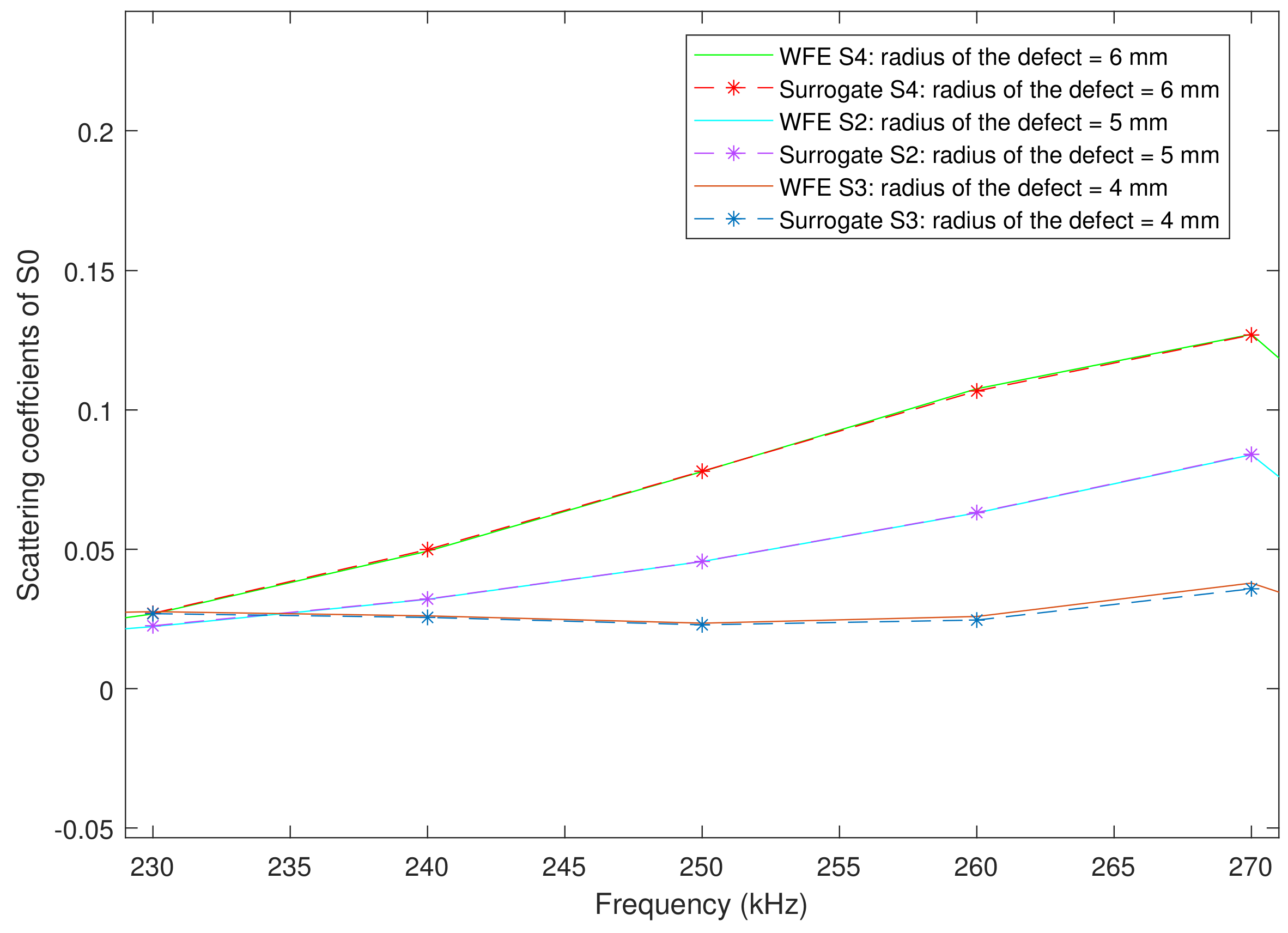
- Construct a kriging surrogate model to establish the relationship between the scattering coefficients and the damage geometry information r using the hybrid wave and finite model introduced in Section 3.2.
- Approximate the posterior distribution of the model parameters using the MH algorithm.
4. Numerical Validation
5. Validation against Physical Experiments
6. Conclusions
- The proposed framework provides a viable approach for damage characterization of bounded structures;
- The kriging surrogate model greatly improves the computational efficiency of the inversion process;
- The inversion error varies depending on the signal source.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Metropolis–Hastings Simulation for Bayesian Updating
| Algorithm A1: Metropolis–Hastings algorithm. |
 |
References
- Hristovska, E.; Stavreva, S. Stress and Deformation Analysis of Joint Plate Depending on Truss Joint Design of Carrying Structure. Tem-J.-Technol. Educ. Manag. Inform. 2021, 10, 892–899. [Google Scholar] [CrossRef]
- Brennan, F.; Peleties, P.; Hellier, A. Predicting weld toe stress concentration factors for T and skewed T-joint plate connections. Int. J. Fatigue 2000, 22, 573–584. [Google Scholar] [CrossRef]
- Karaçalı, Ö. A Single Lap AlCu4Mg Riveted Joint Plate Material Structural Analysis for Bending-Shearing-Squeezing Forces under Airflow and External Loads in Computational Engineering Design. Acta Phys. Pol. A 2019, 135, 925–927. [Google Scholar] [CrossRef]
- Han, Q.; Du, X.; Liu, J.; Li, Z.; Li, L.; Zhao, J. Seismic damage of highway bridges during the 2008 Wenchuan earthquake. Earthq. Eng. Eng. Vib. 2009, 8, 263–273. [Google Scholar] [CrossRef]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Cantero-Chinchilla, S.; Chiachío, J.; Chiachío, M.; Chronopoulos, D.; Jones, A. A robust Bayesian methodology for damage localization in plate-like structures using ultrasonic guided-waves. Mech. Syst. Signal Process. 2019, 122, 192–205. [Google Scholar] [CrossRef]
- Mei, H.; Haider, M.F.; James, R.; Giurgiutiu, V. Pure S0 and SH0 detections of various damage types in aerospace composites. Compos. Part B Eng. 2020, 189, 107906. [Google Scholar] [CrossRef]
- Ng, C.T. Bayesian model updating approach for experimental identification of damage in beams using guided waves. Struct. Health Monit. 2014, 13, 359–373. [Google Scholar] [CrossRef]
- Cantero-Chinchilla, S.; Malik, M.K.; Chronopoulos, D.; Chiachío, J. Bayesian damage localization and identification based on a transient wave propagation model for composite beam structures. Compos. Struct. 2021, 267, 113849. [Google Scholar] [CrossRef]
- Leonard, K.R.; Hinders, M.K. Lamb wave tomography of pipe-like structures. Ultrasonics 2005, 43, 574–583. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, S.; Wang, S.; Wang, Q.; Zhao, W. Multihelical Lamb Wave Imaging for Pipe-Like Structures Based on a Probabilistic Reconstruction Approach. IEEE Trans. Instrum. Meas. 2020, 70, 1–10. [Google Scholar] [CrossRef]
- Allen, J.C.P.; Ng, C.T. Debonding detection at adhesive joints using nonlinear Lamb waves mixing. NDT E Int. 2022, 125, 102552. [Google Scholar] [CrossRef]
- Rucka, M. Experimental and numerical study on damage detection in an L-joint using guided wave propagation. J. Sound Vib. 2010, 329, 1760–1779. [Google Scholar] [CrossRef]
- Fakih, M.A.; Chiachío, M.; Chiachío, J.; Mustapha, S. A Bayesian approach for damage assessment in welded structures using Lamb-wave surrogate models and minimal sensing. NDT E Int. 2022, 128, 102626. [Google Scholar] [CrossRef]
- Hu, H.; Wang, J.; Dong, C.Z.; Chen, J.; Wang, T. A hybrid method for damage detection and condition assessment of hinge joints in hollow slab bridges using physical models and vision-based measurements. Mech. Syst. Signal Process. 2023, 183, 109631. [Google Scholar] [CrossRef]
- Pineda Allen, J.C.; Ng, C.T. Nonlinear guided-wave mixing for condition monitoring of bolted joints. Sensors 2021, 21, 5093. [Google Scholar] [CrossRef]
- Reddy Lyathakula, K.; Yuan, F.G. Fatigue Damage Diagnostics–Prognostics Framework for Remaining Life Estimation in Adhesive Joints. AIAA J. 2022, 60, 4874–4892. [Google Scholar] [CrossRef]
- Wu, J.; Jiang, C.; Fang, H.; Ng, C.T. Damage detection in the T-welded joint using Rayleigh-like feature guided wave. NDT E Int. 2023, 135, 102806. [Google Scholar] [CrossRef]
- Sikdar, S.; Van Paepegem, W.; Ostachowiczc, W.; Kersemans, M. Numerical Simulation Techniques for Damage Response Analysis of Composite Structures. In Structural Health Monitoring System for Synthetic, Hybrid and Natural Fiber Composites; Springer: Singapore, 2021; pp. 85–100. [Google Scholar]
- Renno, J.M.; Mace, B.R. Calculation of reflection and transmission coefficients of joints using a hybrid finite element/wave and finite element approach. J. Sound Vib. 2013, 332, 2149–2164. [Google Scholar] [CrossRef]
- Mitrou, G.; Ferguson, N.; Renno, J. Wave transmission through two-dimensional structures by the hybrid FE/WFE approach. J. Sound Vib. 2017, 389, 484–501. [Google Scholar] [CrossRef]
- Aimakov, N.; Tanner, G.; Chronopoulos, D. Transmission and reflection of waves at structural junctions connecting thin orthotropic plates. Wave Motion 2021, 102, 102716. [Google Scholar] [CrossRef]
- Denis, V.; Mencik, J.M. A wave-based optimization approach of curved joints for improved defect detection in waveguide assemblies. J. Sound Vib. 2020, 465, 115003. [Google Scholar] [CrossRef]
- Chronopoulos, D. Calculation of guided wave interaction with nonlinearities and generation of harmonics in composite structures through a wave finite element method. Compos. Struct. 2018, 186, 375–384. [Google Scholar] [CrossRef]
- Malik, M.K.; Chronopoulos, D.; Tanner, G. Transient ultrasonic guided wave simulation in layered composite structures using a hybrid wave and finite element scheme. Compos. Struct. 2020, 246, 112376. [Google Scholar] [CrossRef]
- Takiuti, B.E.; Manconi, E.; Brennan, M.J.; Lopes, V. Wave scattering from discontinuities related to corrosion-like damage in one-dimensional waveguides. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 521. [Google Scholar] [CrossRef]
- Wu, W.; Malik, M.; Cantero-Chinchilla, S.; Lawrie, T.; Yan, W.; Tanner, G.; Remenyte-Prescott, R.; Chronopoulos, D. Guided waves-based damage identification in plates through an inverse Bayesian process. Ultrasonics 2022, 125, 106773. [Google Scholar] [CrossRef] [PubMed]
- Dey, S.; Mukhopadhyay, T.; Adhikari, S. Metamodel based high-fidelity stochastic analysis of composite laminates: A concise review with critical comparative assessment. Compos. Struct. 2017, 171, 227–250. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Diligent, O.; Grahn, T.; Boström, A.; Cawley, P.; Lowe, M.J. The low-frequency reflection and scattering of the S 0 Lamb mode from a circular through-thickness hole in a plate: Finite element, analytical and experimental studies. J. Acoust. Soc. Am. 2002, 112, 2589–2601. [Google Scholar] [CrossRef] [PubMed]
- Demma, A.; Cawley, P.; Lowe, M.; Roosenbrand, A. The reflection of the fundamental torsional mode from cracks and notches in pipes. J. Acoust. Soc. Am. 2003, 114, 611–625. [Google Scholar] [CrossRef]
- Yan, W.J.; Chronopoulos, D.; Papadimitriou, C.; Cantero-Chinchilla, S.; Zhu, G.S. Bayesian inference for damage identification based on analytical probabilistic model of scattering coefficient estimators and ultrafast wave scattering simulation scheme. J. Sound Vib. 2020, 468, 115083. [Google Scholar] [CrossRef]
- Beck, J.L.; Katafygiotis, L.S. Updating models and their uncertainties. I: Bayesian statistical framework. J. Eng. Mech. Proc. ASCE 1998, 124, 455–462. [Google Scholar] [CrossRef]
- Cheung, S.H.; Beck, J.L. Calculation of posterior probabilities for Bayesian model class assessment and averaging from posterior samples based on dynamic system data. Comput.-Aided Civ. Infrastruct. Eng. 2010, 25, 304–321. [Google Scholar] [CrossRef]
- Simoen, E.; Papadimitriou, C.; Lombaert, G. On prediction error correlation in Bayesian model updating. J. Sound Vib. 2013, 332, 4136–4152. [Google Scholar] [CrossRef]
- Zhang, E.; Feissel, P.; Antoni, J. A comprehensive Bayesian approach for model updating and quantification of modeling errors. Probabilistic Eng. Mech. 2011, 26, 550–560. [Google Scholar] [CrossRef]
- Beck, J.L. Bayesian system identification based on probability logic. Struct. Control. Health Monit. 2010, 17, 825–847. [Google Scholar] [CrossRef]
- Jaynes, E.T. Information theory and statistical mechanics. Phys. Rev. 1957, 106, 620. [Google Scholar] [CrossRef]
- Metropolis, N.; Rosenbluth, A.W.; Rosenbluth, M.N.; Teller, A.H.; Teller, E. Equation of state calculations by fast computing machines. J. Chem. Phys. 1953, 21, 1087–1092. [Google Scholar] [CrossRef]
- Hastings, W.K. Monte Carlo sampling methods using Markov chains and their applications. Biometrika 1970, 57, 97–109. [Google Scholar] [CrossRef]
- Drozdz, M.; Moreau, L.; Castaings, M.; Lowe, M.; Cawley, P. Efficient numerical modelling of absorbing regions for boundaries of guided waves problems. AIP Conf. Proc. 2006, 820, 126–133. [Google Scholar]
- Moreau, L.; Velichko, A.; Wilcox, P. Accurate finite element modelling of guided wave scattering from irregular defects. NDT E Int. 2012, 45, 46–54. [Google Scholar] [CrossRef]
- Manconi, E. Modelling Wave Propagation in Two-Dimensional Structures Using a Wave/Finite Element Technique. Ph.D. Thesis, Dipartimento di Ingegneria Industriale, Universita’di Parma, Parma, Italy, 2008. [Google Scholar]
- Renno, J.M.; Manconi, E.; Mace, B.R. A finite element method for modelling waves in laminated structures. Adv. Struct. Eng. 2013, 16, 61–75. [Google Scholar] [CrossRef]
- Balesdent, M.; Morio, J.; Marzat, J. Kriging-based adaptive importance sampling algorithms for rare event estimation. Struct. Saf. 2013, 44, 1–10. [Google Scholar] [CrossRef]
- Kleijnen, J.P. Kriging metamodeling in simulation: A review. Eur. J. Oper. Res. 2009, 192, 707–716. [Google Scholar] [CrossRef]
- ABAQUS. Abaqus Documentation, Dassault Systèmes: Providence, RI, USA, 2016.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Thickness (mm) | Young’s Modulus (GPa) | Poisson’s Ratio | Density (kg/m) |
|---|---|---|---|
| 1.2 | 69 | 0.33 | 2705 |
| Parameters | True Value | MAP | Mean | Std | COV (%) |
|---|---|---|---|---|---|
| r (mm) | 2.5 | 2.56 | 2.5146 | ||
| - |
| Parameters | S1 | S2 | S3 | S1 & S2 & S3 |
|---|---|---|---|---|
| Errors in terms of MAP (%) | 10.36 | −3.74 | 10.2 | 2.4 |
| Parameters | True Value | MAP | Mean | Std | COV (%) |
|---|---|---|---|---|---|
| r (mm) | 2.5 | 3.05 | 2.5540 | ||
| - | 0.031 | 0.0391 | 0.0127 |
| Parameters | S1 | S2 | S3 | S1 & S2 & S3 |
|---|---|---|---|---|
| Errors in terms of MAP (%) | −17.2 | 26.0 | 40.0 | 22.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, W.; Cantero-Chinchilla, S.; Yan, W.-j.; Chiachio Ruano, M.; Remenyte-Prescott, R.; Chronopoulos, D. Damage Quantification and Identification in Structural Joints through Ultrasonic Guided Wave-Based Features and an Inverse Bayesian Scheme. Sensors 2023, 23, 4160. https://doi.org/10.3390/s23084160
Wu W, Cantero-Chinchilla S, Yan W-j, Chiachio Ruano M, Remenyte-Prescott R, Chronopoulos D. Damage Quantification and Identification in Structural Joints through Ultrasonic Guided Wave-Based Features and an Inverse Bayesian Scheme. Sensors. 2023; 23(8):4160. https://doi.org/10.3390/s23084160
Chicago/Turabian StyleWu, Wen, Sergio Cantero-Chinchilla, Wang-ji Yan, Manuel Chiachio Ruano, Rasa Remenyte-Prescott, and Dimitrios Chronopoulos. 2023. "Damage Quantification and Identification in Structural Joints through Ultrasonic Guided Wave-Based Features and an Inverse Bayesian Scheme" Sensors 23, no. 8: 4160. https://doi.org/10.3390/s23084160
APA StyleWu, W., Cantero-Chinchilla, S., Yan, W. -j., Chiachio Ruano, M., Remenyte-Prescott, R., & Chronopoulos, D. (2023). Damage Quantification and Identification in Structural Joints through Ultrasonic Guided Wave-Based Features and an Inverse Bayesian Scheme. Sensors, 23(8), 4160. https://doi.org/10.3390/s23084160