
The Influence of Micro-Hexapod Walking-Induced Pose Changes on LiDAR-SLAM Mapping Performance


Abstract
:1. Introduction
2. Materials and Methods
2.1. Methodology Overview
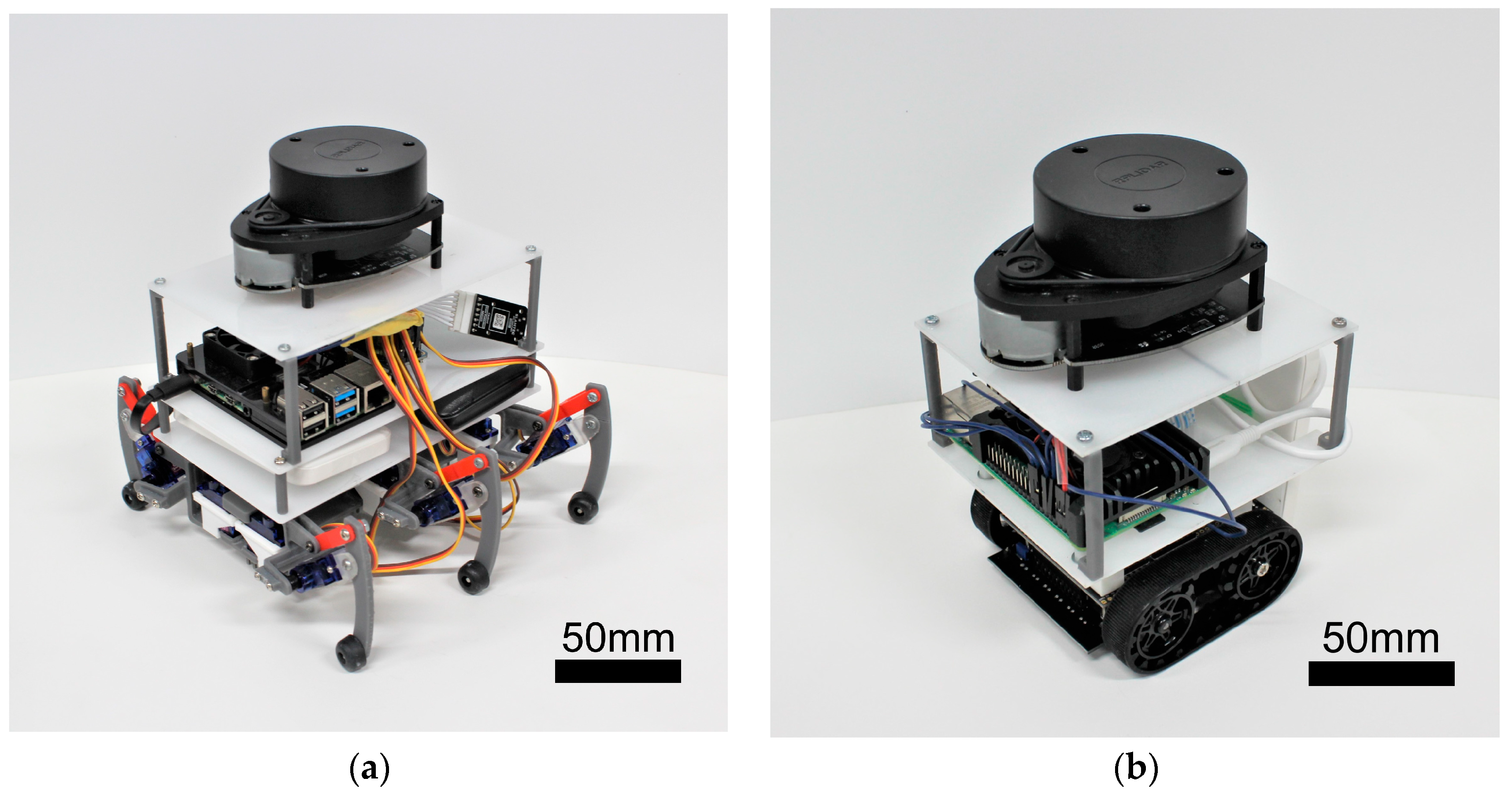
2.2. Robot Specifications
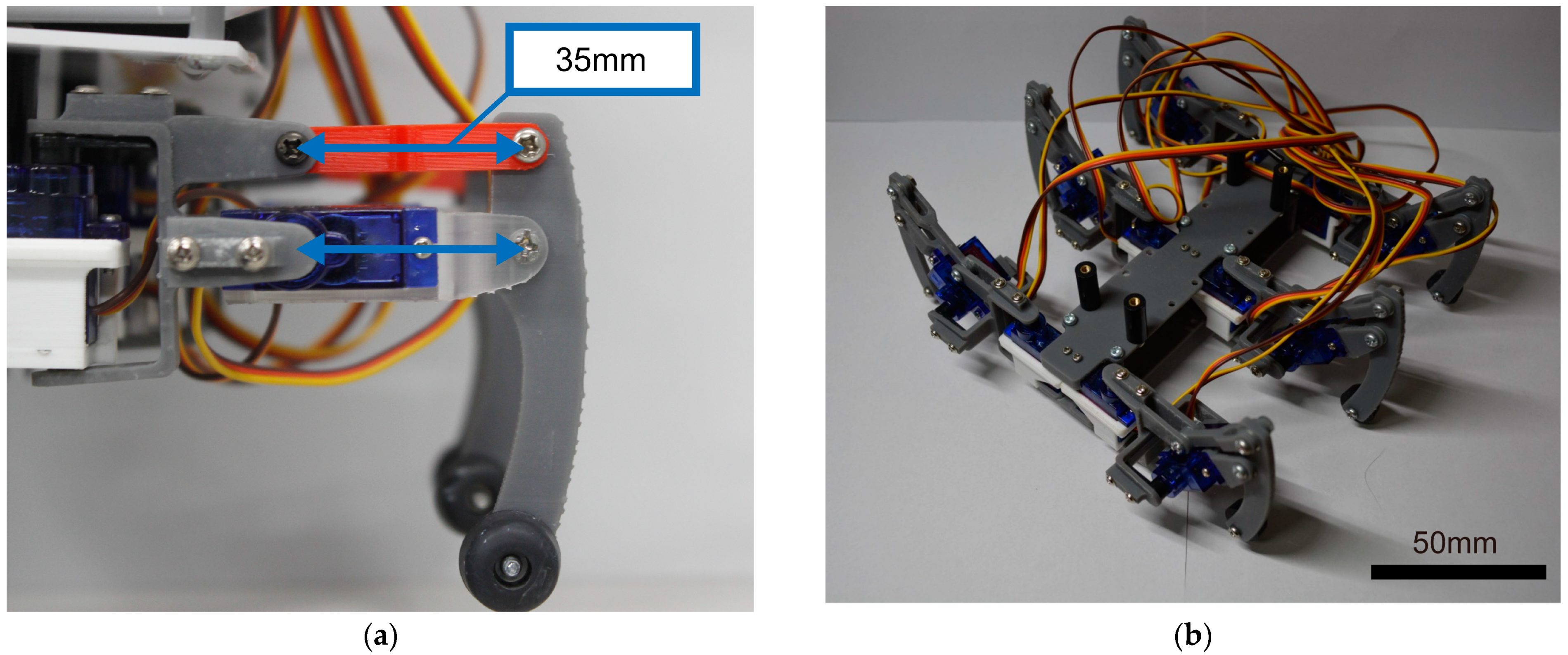
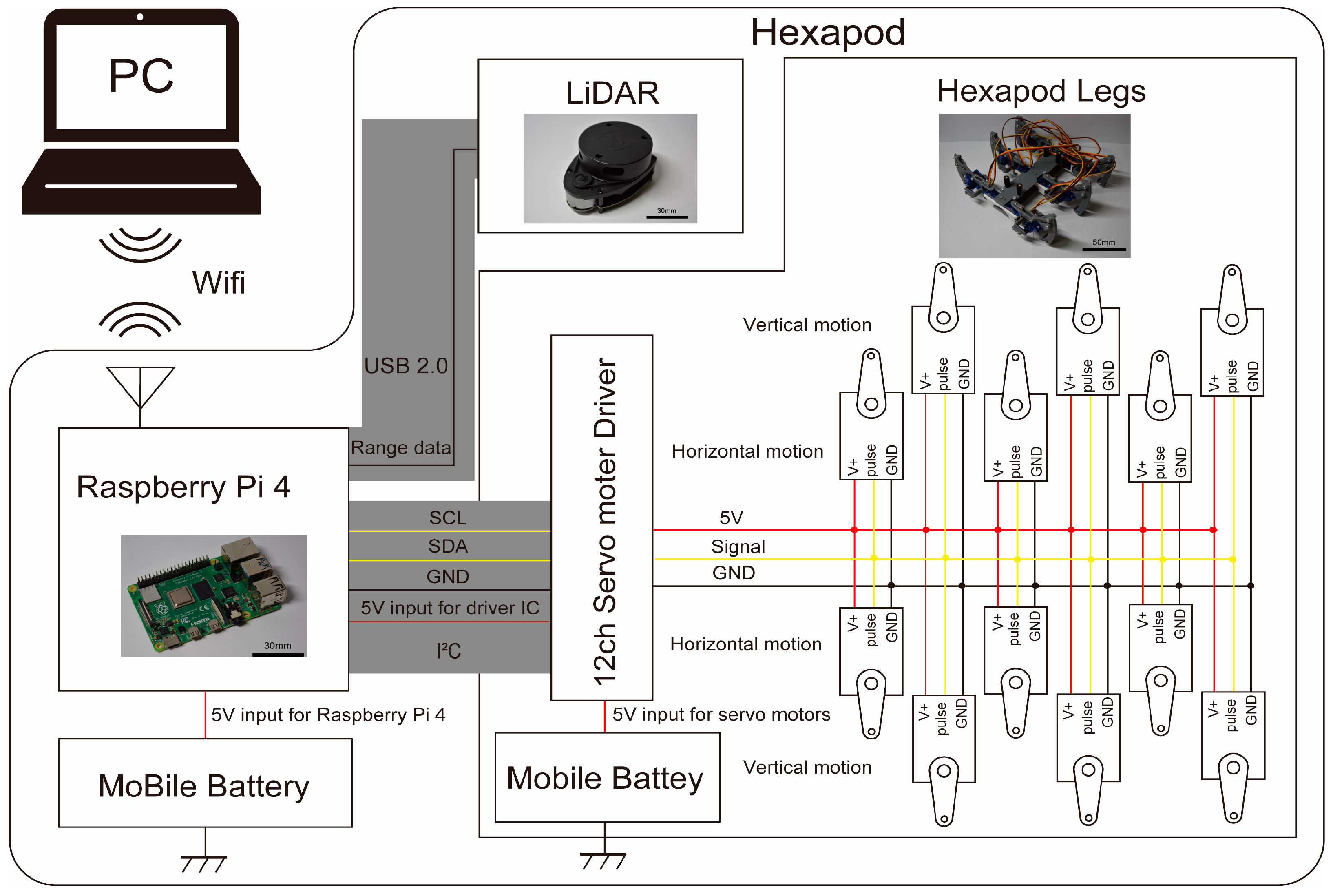
2.2.1. Hexapod Robot
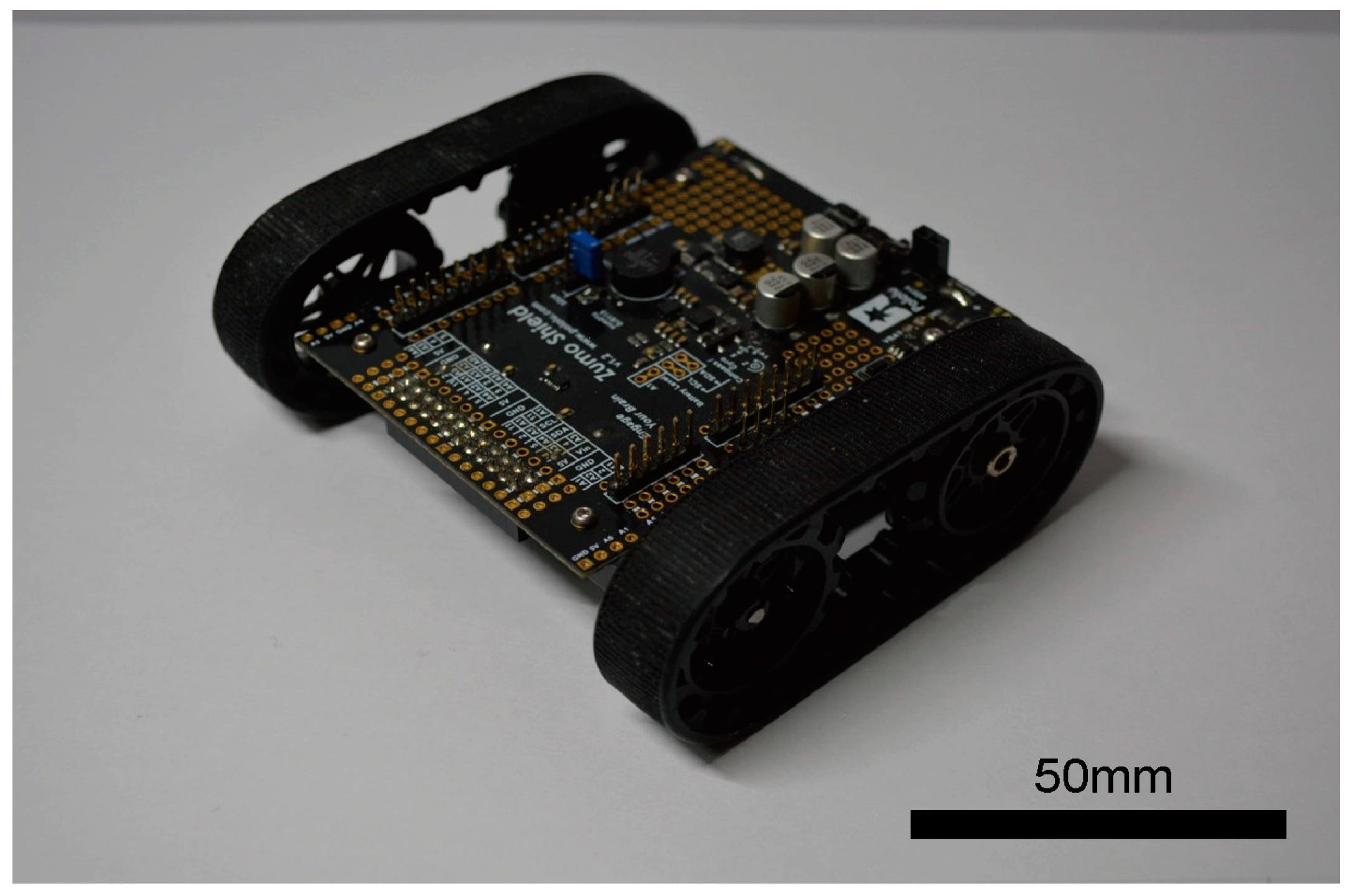
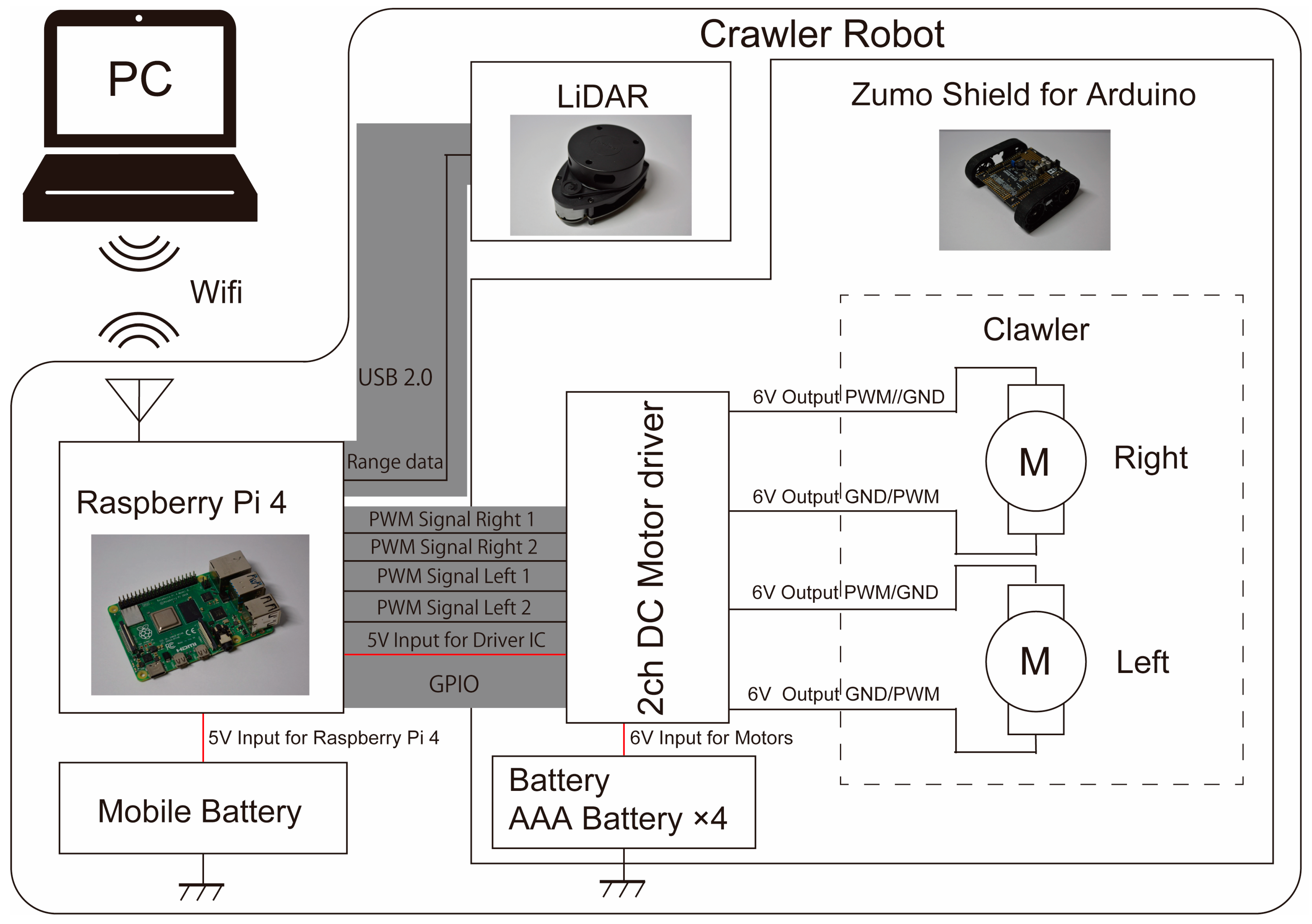
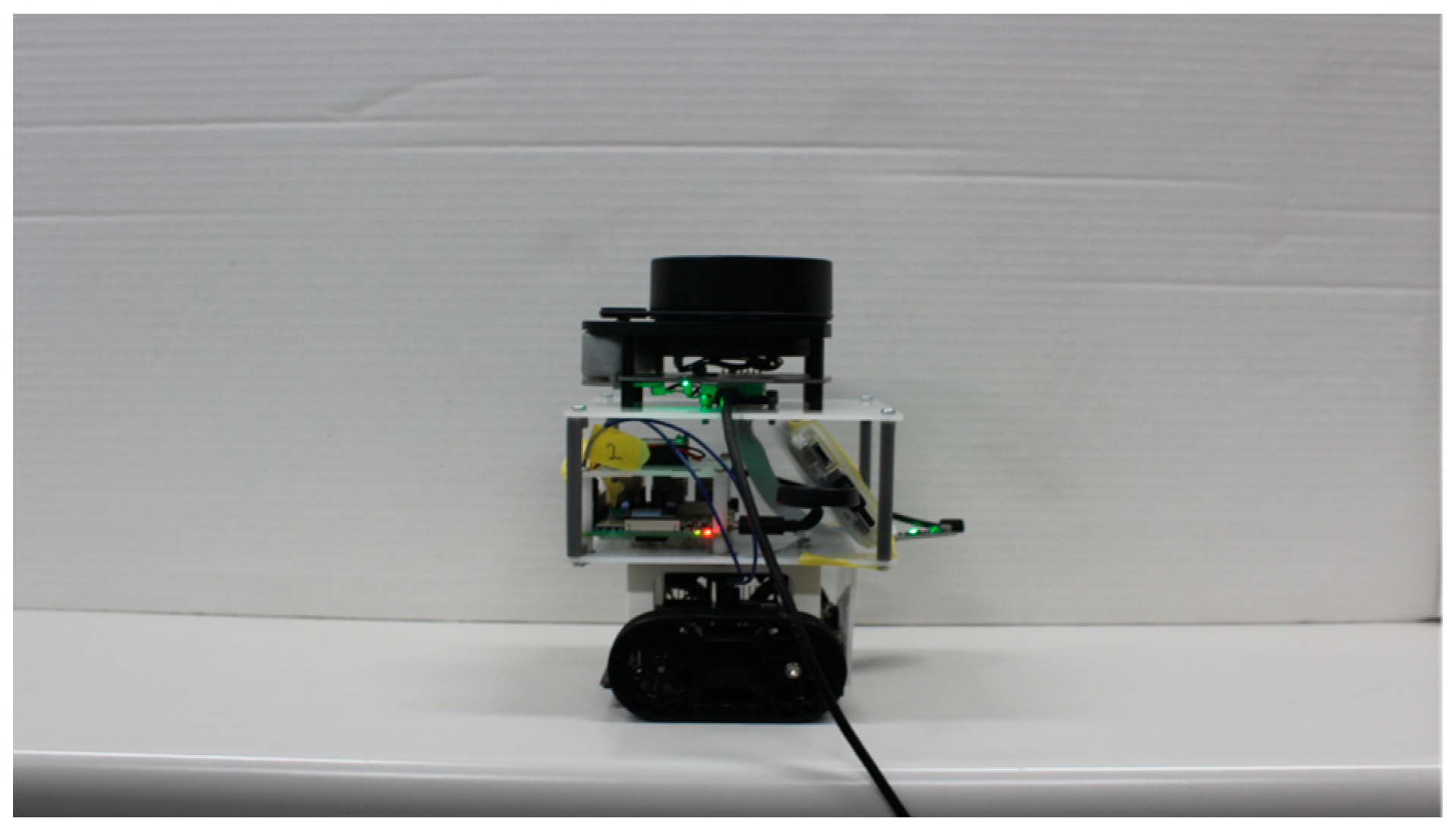
2.2.2. Crawler Robot
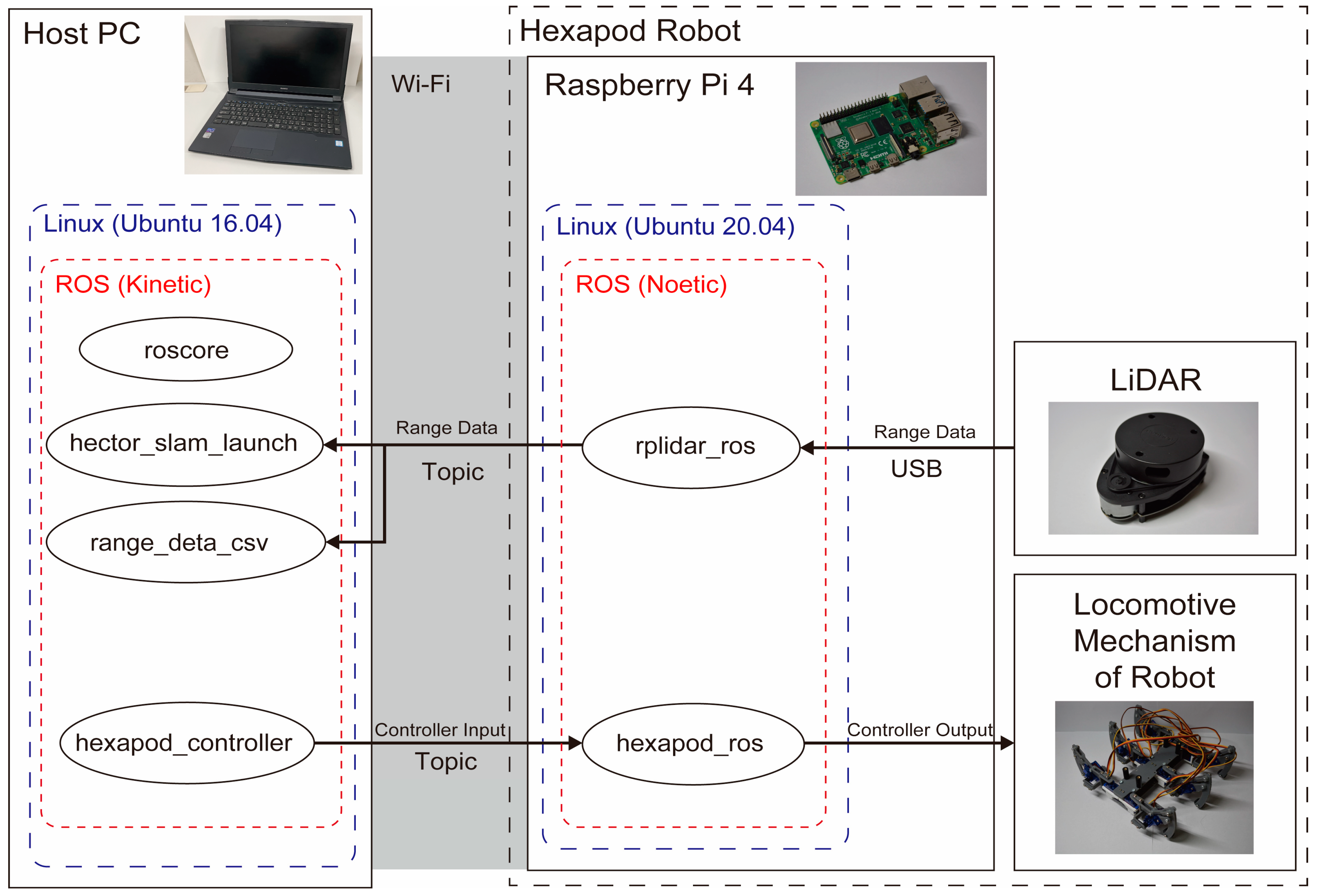
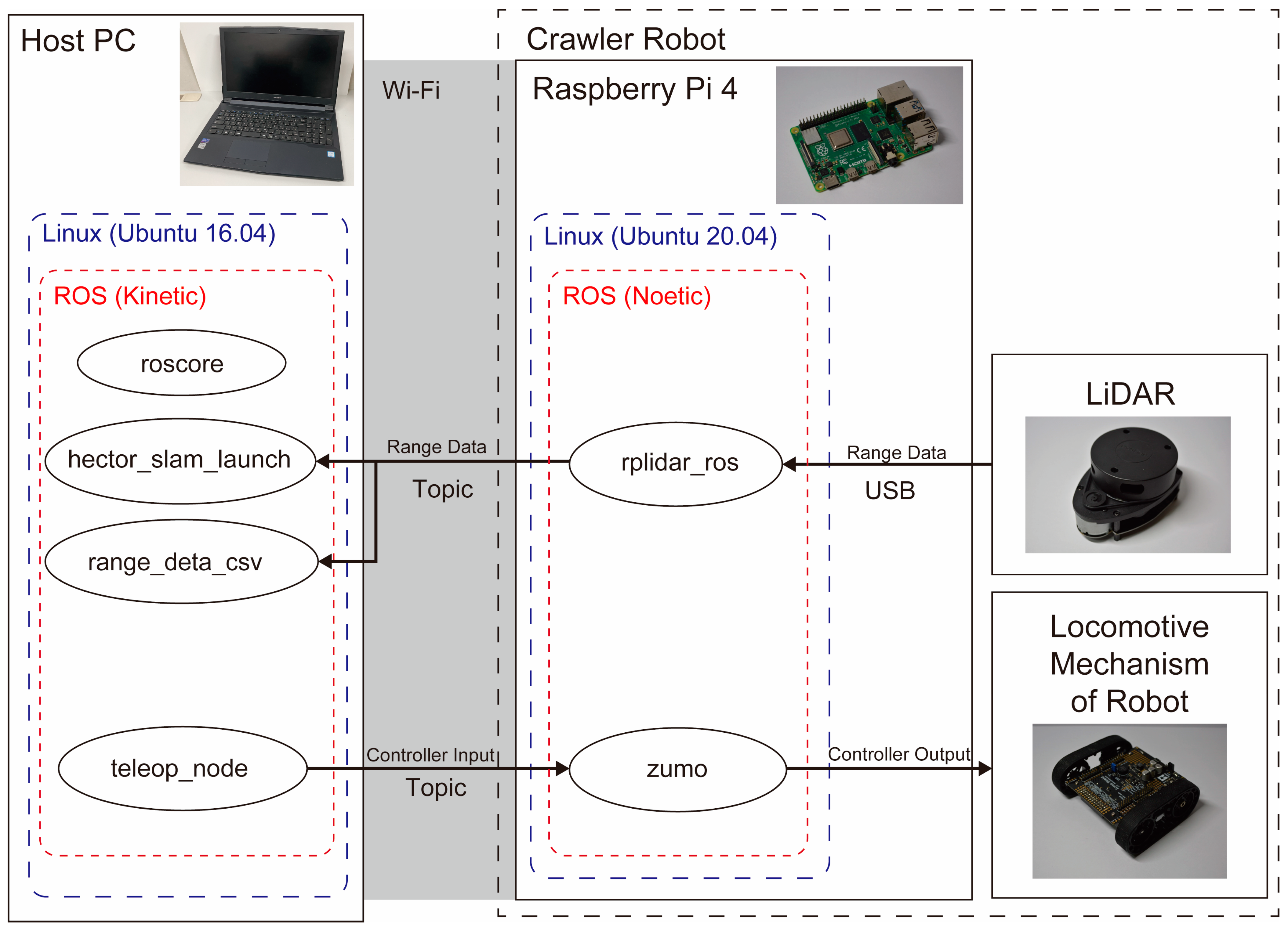
2.3. SLAM
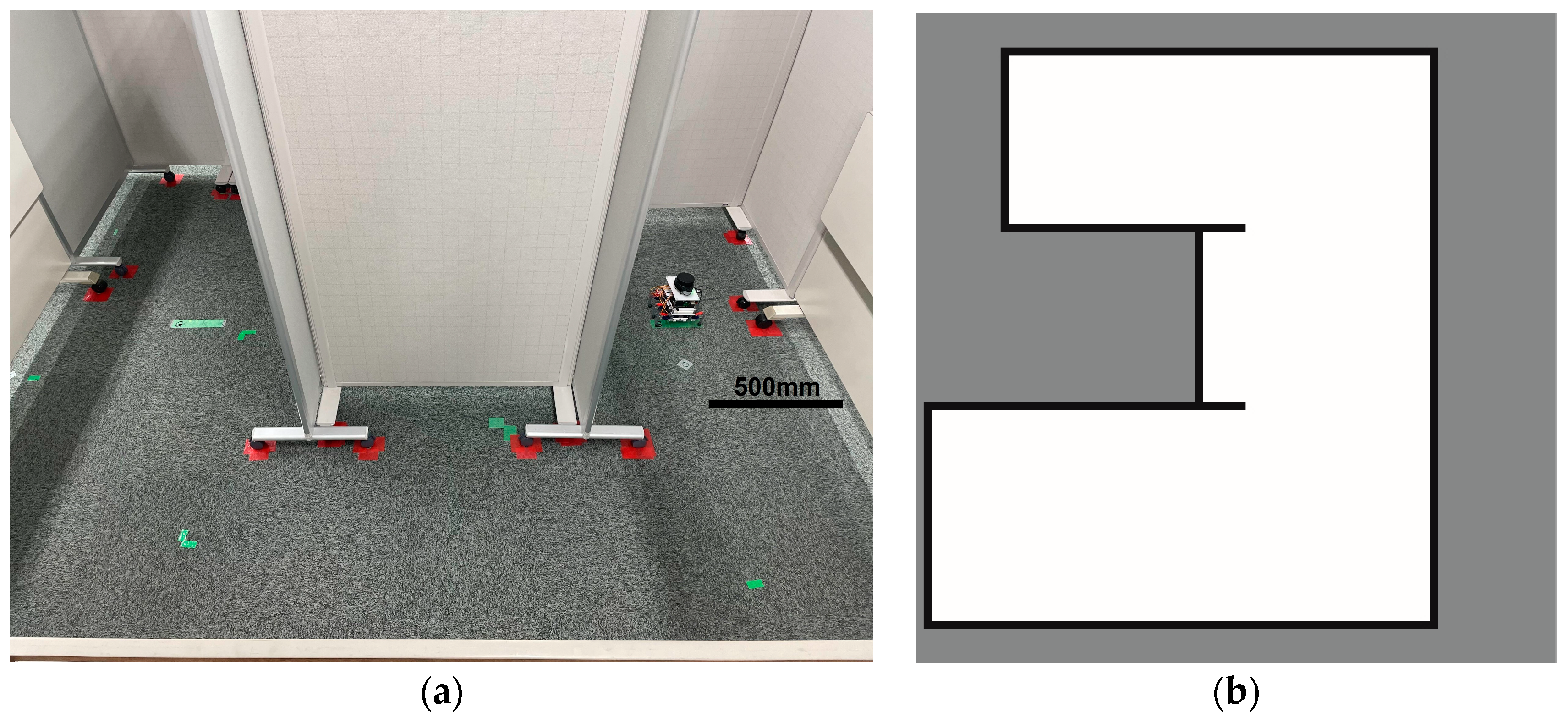
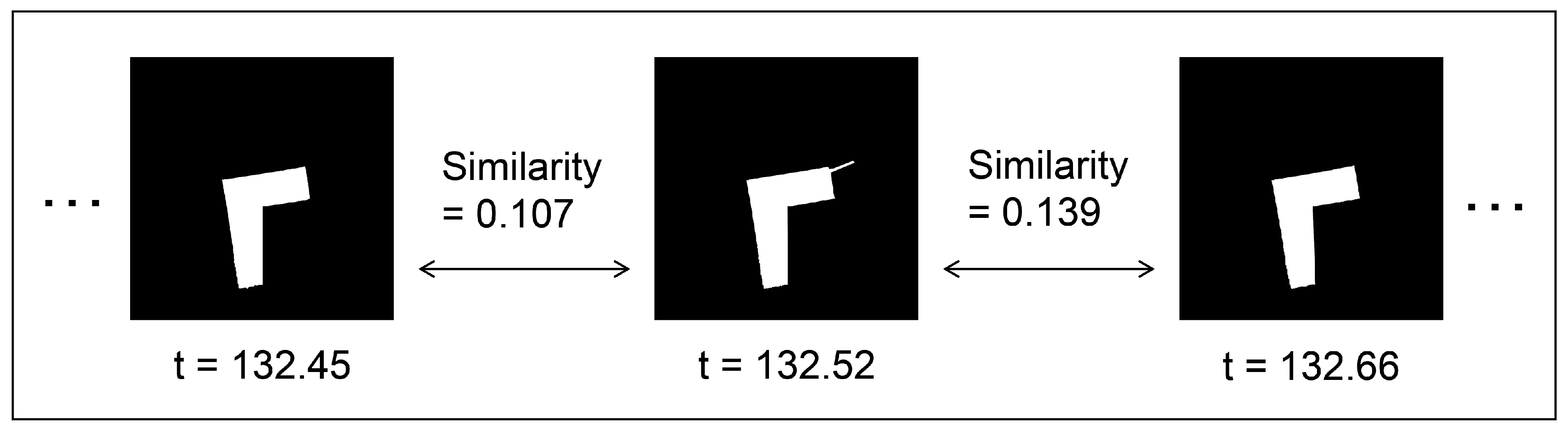
2.4. Evaluation Method
3. Results and Discussion
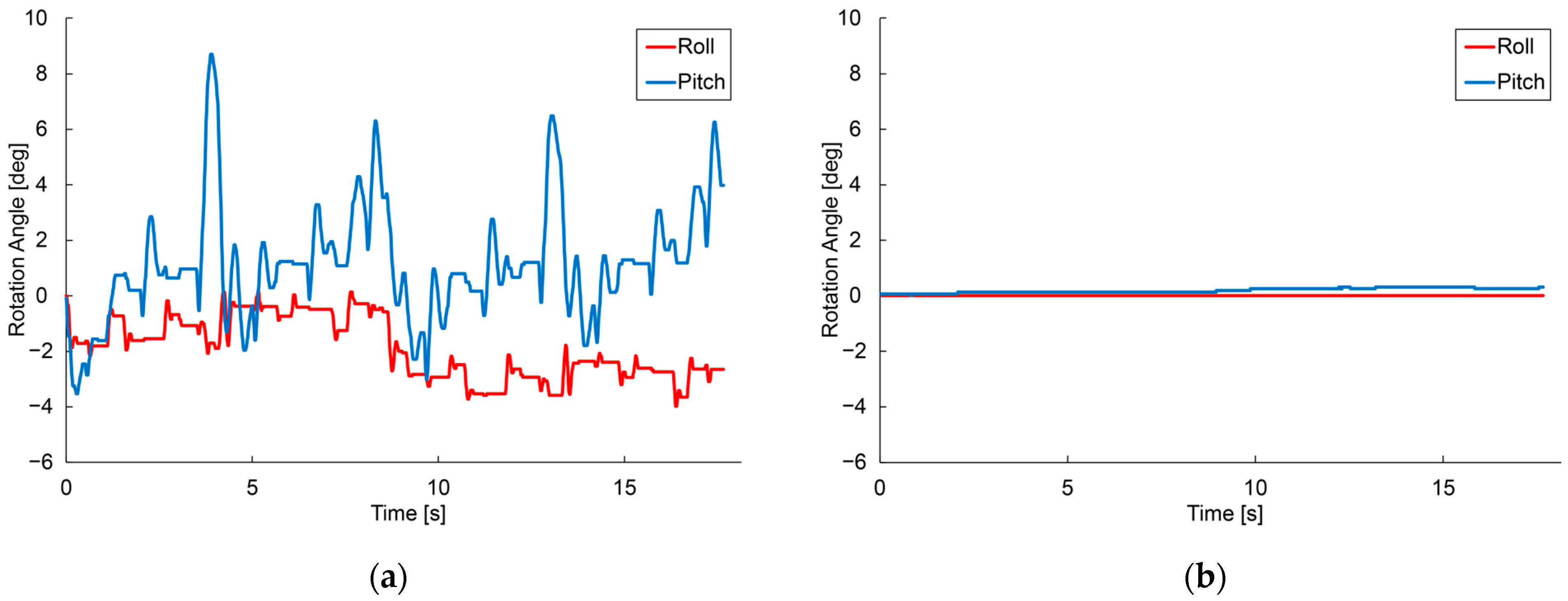
3.1. Robot Body Axis Changes
3.2. SLAM Experimental Results
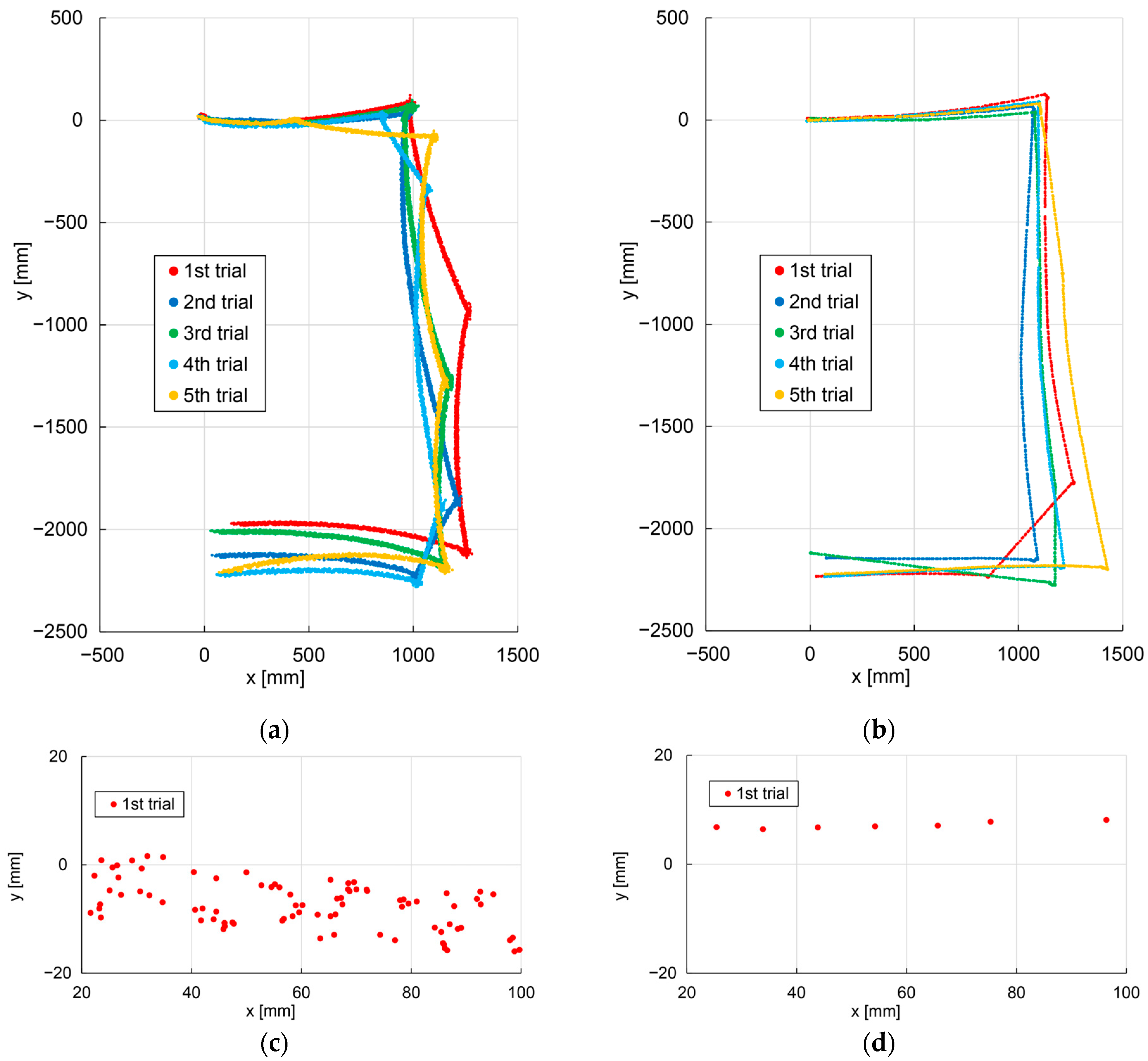
3.2.1. Traveled Path
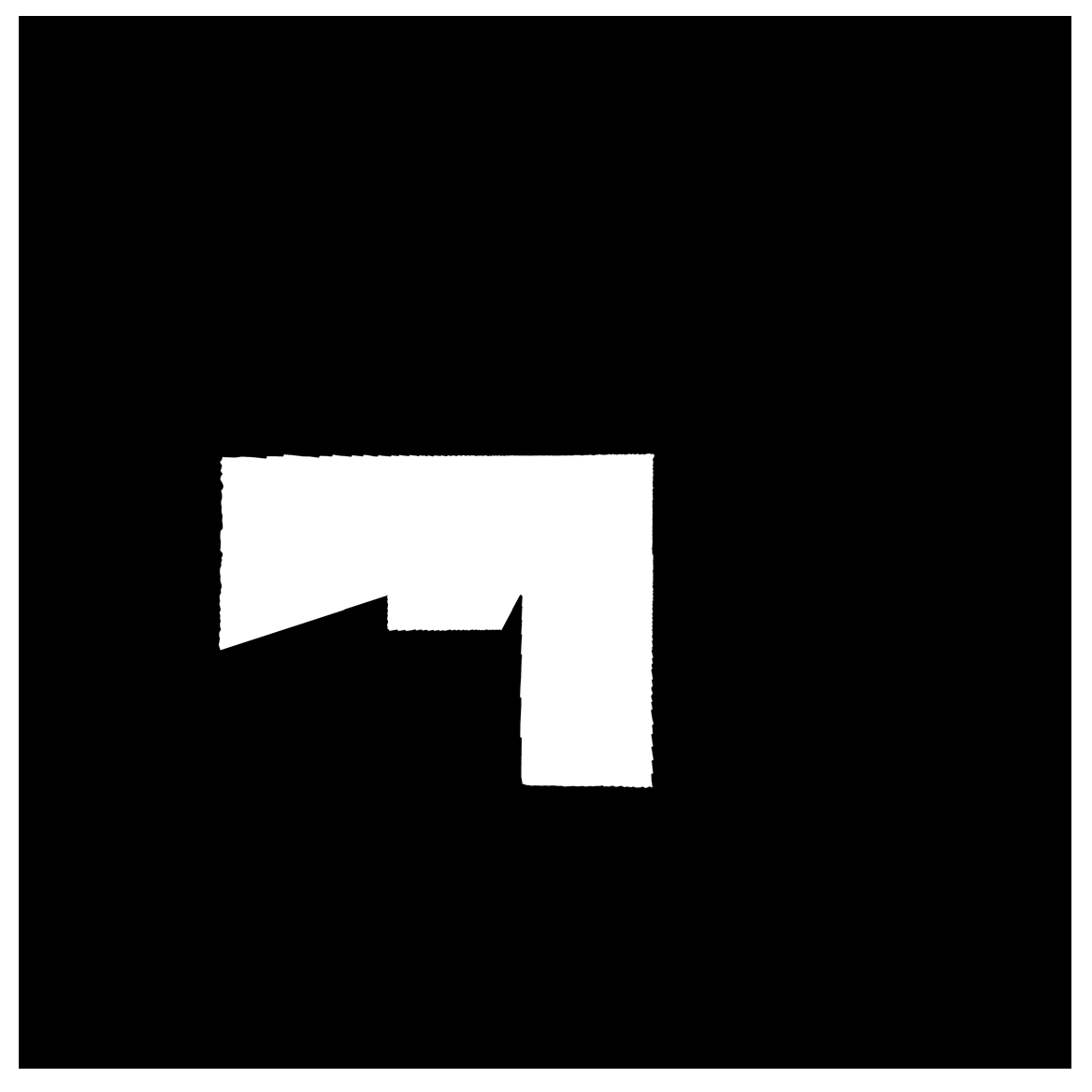
3.2.2. Map Generated by SLAM
3.2.3. Point Cloud Data Acquired by LiDAR
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- SeungSub, O.; Jehun, H.; Hyunjung, J.; Soyeon, L.; Jinho, S. A Study on the Disaster Response Scenarios using Robot Technology. In Proceedings of the International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Republic of Korea, 28 June–1 July 2017. [Google Scholar]
- Zhang, X.; An, Y.; Fu, G.; Lu, G.; Liang, S. Survey on Key Technology of Robocup Rescue Robot. In Proceedings of the Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019. [Google Scholar]
- Ilmir, Z.I.; Ilya, M.A. Comparison of ROS-based Visual SLAM methods in homogeneous indoor environment. In Proceedings of the IEEE Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2017. [Google Scholar]
- Shan, T.; Englot, B. LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Chen, X.; Zhang, H.; Lu, H.; Xiao, J.; Qiu, Q.; Li, Y. Robust SLAM system based on monocular vision and LiDAR for robotic urban search and rescue. In Proceedings of the IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017. [Google Scholar]
- Duncan, W.H.; Ronald, S.F. Running beyond the bio-inspired regime. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Washington State Convention Center Seattle, Washington, DC, USA, 26–30 May 2015. [Google Scholar]
- Baisch, A.T.; Sreetharan, P.S.; Wood, R.J. Biologically-Inspired Locomotion of a 2 g Hexapod Robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Zhu, Y.; Qi, M.; Liu, Z.; Huang, J.; Huang, D.; Yan, X.; Lin, L. A 5-mm Untethered Crawling Robot via Self-Excited Electrostatic Vibration. IEEE Trans. Robot. 2022, 38, 719–730. [Google Scholar] [CrossRef]
- Andrew, T.B.; Christian, H.; Michael, K.; Robert, J.W. HAMR3: An autonomous 1.7 g ambulatory robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Shannon, A.R.; Andrew, J.F.; Yuen, K.Y. Miniature Resonant Ambulatory Robot. IEEE Robot. Autom. Lett. 2017, 2, 337–343. [Google Scholar]
- Shannon, A.R.; Andrew, J.F.; Yuen, K.Y. Monolithic Piezoelectric Insect with Resonance Walking. IEEE/ASME Trans. Mechatron. 2018, 23, 524–530. [Google Scholar]
- Onur, O.; Andrew, T.B.; Robert, J.W. Design and Feedback Control of a Biologically-Inspired Miniature Quadruped. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Onur, O.; Andrew, T.B.; Daniel, I.; Robert, J.W. Powertrain Selection for a Biologically-Inspired Miniature Quadruped Robot. In Proceedings of the IEEE International Conference on Robotics & Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Kazuto, A.; Sumito, N. A micro hexapod robot for swarm applications assembled from a single FPC sheet. Jpn. J. Appl. Phys. 2021, 60, SCCL03. [Google Scholar]
- Michael, K.; Benjamin, H.W.; Benjamin, G.; Brody, M.; Onur, O.; Andrew, B.; Pierre-Marie, M.; Joshua, R.S.; Robert, J.W. A Wirelessly Powered, Biologically Inspired Ambulatory Microrobot. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Benjamin, G.; Raphael, Z.; Neel, D.; Elizabeth, F.H.; Griffin, W.; Mirko, K.; Robert, J.W. Power and Control Autonomy for High-Speed Locomotion With an Insect-Scale Legged Robot. IEEE Robot. Autom. Lett. 2014, 3, 987–993. [Google Scholar]
- Gwang-Pil, J.; Carlos, S.C.; Sun-Pill, J.; Ronald, S.F.; Kyu-Jin, C. An Integrated Jumping Crawling Robot using Height-Adjustable Jumping Module. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Hisayuki, A.; Atsuhisa, H.; Ryutaro, M.; Ohomi, F.; Daigo, M.; Theodore, S. Micro hopping robot with IR sensor for disaster survivor detection. In Proceedings of the IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Kobe, Japan, 6–9 June 2005. [Google Scholar]
- Kim Tien, N.; Doyeon, H.; Sunyong, J.; Seong Young, K.; Jong-Oh, P.; Sukho, P. Development of Bio-inspired Walking Microrobot using PVDF/PVP/PSSA-based IPMC Actuator. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014. [Google Scholar]
- José, C.B.; Ricardo, P.; José, C.; Robert, C. Radio Frequency Controlled Hexapod Robot with Bioinspired Kinematic Configuration used for Rescue Activities after Landslides in Urban Areas. In Proceedings of the International Conference on Advances in Electrical, Computing, Communication and Sustainable Technologies (ICAECT), Bhilai, India, 5–6 January 2023. [Google Scholar]
- Altendorfer, R.; Moore, N.; Komsuoglu, H.; Buehler, M.; Brown, H.B.; McMordie, D.; Saranli, U.; Full, R.; Koditschek, D.E. Rhex: A biologically inspired hexapod runner. Auton. Robot. 2001, 11, 207–213. [Google Scholar] [CrossRef]
- Mahdi, A.; Siamak, G.F.; Fuchen, C.; Huibin, G.; Cagdas, D.O. Design and fabrication of a foldable hexapod robot towards experimental swarm applications. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Rafael, P.B.; Gabriel, P.D.N.; Alexandre, B.C.; Bruno, A.A. Flexibility in Hexapod Robots: Exploring Mobility of the Body. IEEE Access 2023, 11, 110454–110471. [Google Scholar]
- Ding, X.; Wang, Z.; Rovetta, A.; Zhu, J.M. Locomotion Analysis of Hexapod Robot. In Climbing and Walking Robots; Behnam, M., Ed.; Intech: London, UK, 2010; Volume 3, pp. 291–310. [Google Scholar]
- Lu, J.; Tao, W.; Xu, S.; Chen, Z.; Zeng, J.; Li, J. Mechanism Design and Gait Analysis of A Hexapod Robot. In Proceedings of the International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), Xi’an, China, 15–17 July 2022. [Google Scholar]
- Ri, M.; Romi, W.; Donny, P.U. Implementation of AHRS (Attitude Heading and Reference Systems) With Madgwick Filter as Hexapods Robot Navigation. In Proceedings of the International Conference on Informatics Electrical and Electronics (ICIEE), Yogyakarta, Indonesia, 5–7 October 2023. [Google Scholar]
- Antonis, B.; Yannick, V.; Matthew, R.T.; Suresh, K.; Chris, H.; Tom, B.S. Hexapod robotic system for indoor neutron and gamma radiation mapping and inspection. In Proceedings of the International Symposium on Design and Diagnostics of Electronic Circuits and Systems (DDECS), Prague, Czech Republic, 6–8 April 2022. [Google Scholar]
- Petr, Č.; Jan, F. On Localization and Mapping with RGB-D Sensor and Hexapod Walking Robot in Rough Terrains. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016. [Google Scholar]
- Thomas, F.; Taihu, P.; Petr, Č.; Pablo, D.C.; Jan, F. Stereo Vision-based Localization for Hexapod Walking Robots Operating in Rough Terrains. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016. [Google Scholar]
- Stefan, K.; von Stryk, O.; Johannes, M.; Uwe, K. A Flexible and Scalable SLAM System with Full 3D Motion Estimation. In Proceedings of the IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Kyoto, Japan, 1–5 November 2011. [Google Scholar]
- Hu, M.K. Visual pattern recognition by moment invariants. IRE Trans. Inf. Theory 1962, 8, 179–187. [Google Scholar]
- Hu, H.; Li, Y.; Liu, M.; Liang, W. Classification of defects in steel strip surface based on multiclass support vector machine. Multimed. Tools Appl. 2014, 69, 199–216. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spec | Hexapod Robot | Crawler Robot |
|---|---|---|
| Size (W H L) (mm) | 205 183 220 | 100 168 120 |
| Weight (g) | 1020 | 736 |
| Speed (mm/s) | 7 | 100 |
| Number of Trials | Hexapod Robot | Crawler Robot |
|---|---|---|
| 1st |  |  |
| 0.0746 | 0.0764 | |
| 2nd |  |  |
| 0.0819 | 0.0618 | |
| 3rd |  |  |
| 0.0966 | 0.0717 | |
| 4th |  |  |
| 0.0995 | 0.0609 | |
| 5th |  |  |
| 0.0973 | 0.0676 | |
| Average | 0.0900 | 0.0677 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seki, H.; Yamamoto, Y.; Nagasawa, S. The Influence of Micro-Hexapod Walking-Induced Pose Changes on LiDAR-SLAM Mapping Performance. Sensors 2024, 24, 639. https://doi.org/10.3390/s24020639
Seki H, Yamamoto Y, Nagasawa S. The Influence of Micro-Hexapod Walking-Induced Pose Changes on LiDAR-SLAM Mapping Performance. Sensors. 2024; 24(2):639. https://doi.org/10.3390/s24020639
Chicago/Turabian StyleSeki, Hiroshi, Yuhi Yamamoto, and Sumito Nagasawa. 2024. "The Influence of Micro-Hexapod Walking-Induced Pose Changes on LiDAR-SLAM Mapping Performance" Sensors 24, no. 2: 639. https://doi.org/10.3390/s24020639
APA StyleSeki, H., Yamamoto, Y., & Nagasawa, S. (2024). The Influence of Micro-Hexapod Walking-Induced Pose Changes on LiDAR-SLAM Mapping Performance. Sensors, 24(2), 639. https://doi.org/10.3390/s24020639