
Constrained Cubature Particle Filter for Vehicle Navigation


Abstract
:1. Introduction
2. Cubature Particle Filter
3. Constrained Cubature Particle Filter
3.1. Importance Sampling
3.2. Resampling
3.3. Convergence Analysis
4. Experimental Results
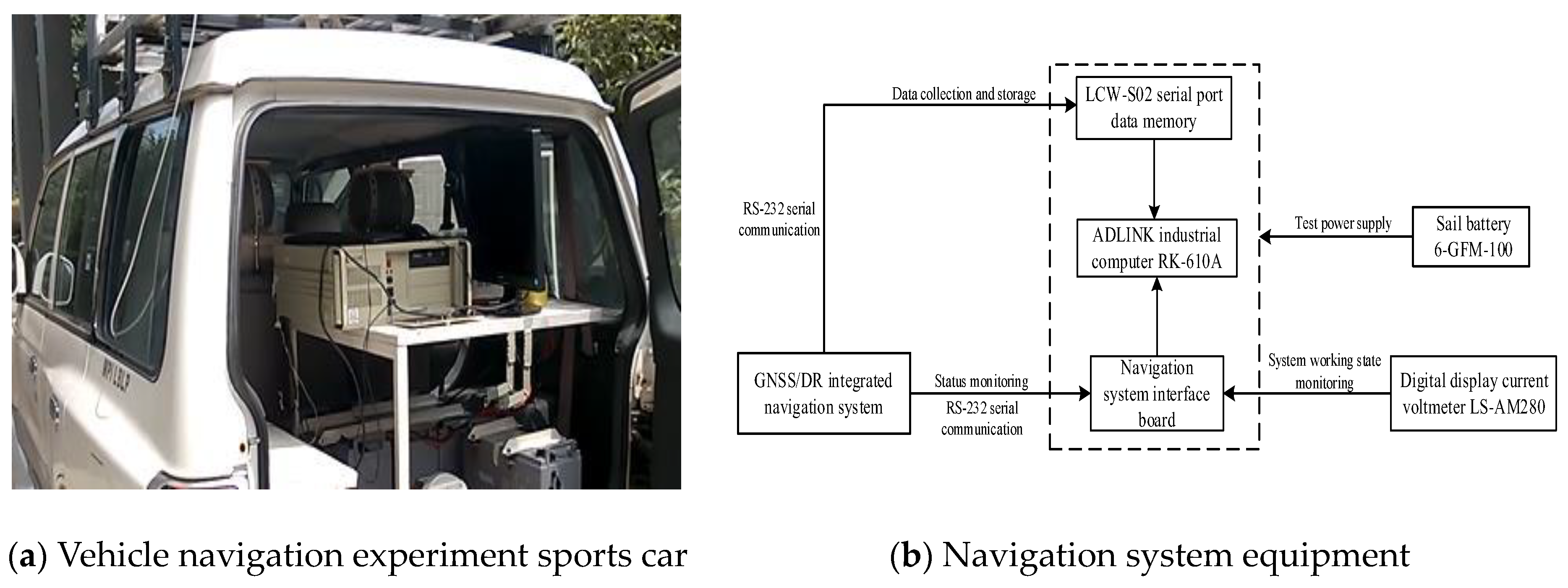
4.1. GNSS/DR Vehicle Navigation System
4.2. Experimental Setup
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, W.; Xing, C.Y.; Feng, S. State of the art and perspectives of autonomous navigation technology. Acta Aeronaut. Astronaut. Sin. 2021, 42, 525049. [Google Scholar] [CrossRef]
- Zhao, X.; Min, H.; Xu, Z.; Wang, W. An ISVD and SFFSD-based vehicle ego-positioning method and its application on indoor parking guidance. Transp. Res. Part C Emerg. Technol. 2019, 108, 29–48. [Google Scholar] [CrossRef]
- Yuan, Y.; Li, F.; Chen, J.; Wang, Y.; Liu, K. An improved Kalman filter algorithm for tightly GNSS/INS integrated navigation system. Math. Biosci. Eng. 2024, 21, 963–983. [Google Scholar] [CrossRef] [PubMed]
- Brossard, M.; Barrau, A.; Bonnabel, S. AI-IMU dead reckoning. IEEE Trans. Intell. Veh. 2020, 5, 585–595. [Google Scholar] [CrossRef]
- Hu, G.; Ni, L.; Gao, B.; Zhu, X.; Wang, W.; Zhong, Y. Model predictive based unscented Kalman filter for hypersonic vehicle navigation with INS/GNSS integration. IEEE Access 2020, 8, 4814–4823. [Google Scholar] [CrossRef]
- Min, H.; Wu, X.; Cheng, C.; Zhao, X. Kinematic and dynamic vehicle model-assisted global positioning method for autonomous vehicles with low-cost GPS/camera/in-vehicle sensors. Sensors 2019, 19, 5430. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Min, H.; Wu, X.; Hou, X.; Li, Y.; Zhao, X. High accuracy and low complexity LiDAR place recognition using unitary invariant frobenius norm. IEEE Sens. J. 2022, 23, 11205–11207. [Google Scholar] [CrossRef]
- Gustafsson, F.; Hendeby, G. Some relations between extended and unscented Kalman filters. IEEE Trans. Signal Process. 2012, 60, 545–555. [Google Scholar] [CrossRef]
- Stepanov, O.A.; Litvinenko, Y.A.; Vasiliev, V.A.; Toropov, A.B.; Basin, M.V. Polynomial filtering algorithm applied to navigation data processing under quadratic nonlinearities in system and measurement equations. Part 1. description and comparison with Kalman type algorithms. Gyroscopy Navig. 2021, 12, 205–223. [Google Scholar] [CrossRef]
- Gao, B.; Gao, S.; Hu, G.; Zhong, Y.; Gu, C. Maximum likelihood principle and moving horizon estimation based adaptive unscented Kalman filter. Aerosp. Sci. Technol. 2018, 73, 184–196. [Google Scholar] [CrossRef]
- Hu, G.; Gao, B.; Zhong, Y.; Gu, C. Unscented Kalman filter with process noise covariance estimation for vehicular INS/GPS integration system. Inf. Fusion 2020, 64, 194–204. [Google Scholar] [CrossRef]
- Gao, B.; Hu, G.; Zhang, L.; Zhong, Y.; Zhu, X. Cubature Kalman filter with closed-loop covariance feedback control for integrated INS/GNSS navigation. Chin. J. Aeronaut. 2023, 36, 363–376. [Google Scholar] [CrossRef]
- Gao, B.; Li, W.; Hu, G.; Zhong, Y.; Zhu, X. Mahalanobis distance-based fading cubature Kalman filter with augmented mechanism for hypersonic vehicle INS/CNS autonomous integration. Chin. J. Aeronaut. 2022, 35, 114–128. [Google Scholar] [CrossRef]
- Kulikov, G.Y.; Kulikova, M.V. Stability analysis of extended, cubature and unscented Kalman filters for estimating stiff continuous-discrete stochastic systems. Automatica 2018, 90, 91–97. [Google Scholar] [CrossRef]
- Wei, W.; Gao, S.; Zhong, Y.; Gu, C.; Hu, G. Adaptive square-root unscented particle filtering algorithm for dynamic navigation. Sensors 2018, 18, 2337. [Google Scholar] [CrossRef] [PubMed]
- Speekenbrink, M. A tutorial on particle filters. J. Math. Psychol. 2016, 73, 140–152. [Google Scholar] [CrossRef]
- Closas, P.; Guillamon, A. Sequential estimation of intrinsic activity and synaptic input in single neurons by particle filtering with optimal importance density. EURASIP J. Adv. Signal Process. 2017, 2017, 65. [Google Scholar] [CrossRef]
- Gordon, N.J.; Salmond, D.J.; Smith, A.F.M. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proc. F Radar Signal Process. 1993, 140, 107–113. [Google Scholar] [CrossRef]
- Del Moral, P.; Doucet, A.; Jasra, A. On adaptive resampling strategies for sequential Monte Carlo methods. Bernoulli 2012, 18, 252–278. [Google Scholar] [CrossRef]
- Jia, K.; Pei, Y.; Gao, Z.; Zhong, Y.; Gao, S.; Wei, W.; Hu, G. A quaternion-based robust adaptive spherical simplex unscented particle filter for MINS/VNS/GNS integrated navigation system. Math. Probl. Eng. 2019, 2019, 8532601. [Google Scholar] [CrossRef]
- Pitt, M.; Shephard, N. Filtering via simulation: Auxiliary particle filters. J. Am. Stat. Assoc. 1999, 94, 590–599. [Google Scholar] [CrossRef]
- Liu, D.; Duan, J.; Shi, H. A strong tracking square root central difference FastSLAM for unmanned intelligent vehicle with adaptive partial systematic resampling. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3110–3120. [Google Scholar] [CrossRef]
- Liu, H.T.; Lin, Y.M.; Chen, Y.H.; Zhou, E.M.; Peng, B. A study on resampling strategy of intelligent particle filter based on genetic algorithm. J. Electron. Inf. Technol. 2021, 43, 3459–3466. [Google Scholar] [CrossRef]
- Xia, B.; Sun, Z.; Zhang, R.; Lao, Z. A cubature particle filter algorithm to estimate the state of the charge of lithium-ion batteries based on a second-order equivalent circuit model. Energies 2017, 10, 457. [Google Scholar] [CrossRef]
- Shi, Q.; Liu, M.; Hang, L. A novel distribution system state estimator based on robust cubature particle filter used for non-Gaussian noise and bad data scenarios. IET Gener. Transm. Distrib. 2022, 16, 1385–1399. [Google Scholar] [CrossRef]
- Feng, H.; Cai, Z. Target tracking based on improved cubature particle filter in UWSNs. IET Radar Sonar Navig. 2019, 13, 638–645. [Google Scholar] [CrossRef]
- Zhang, Y.G.; Cheng, R.; Huang, Y.L.; Li, N. Truncated adaptive cubature particle filter. Syst. Eng. Electron. 2016, 38, 382–391. [Google Scholar] [CrossRef]
- Liu, M.; He, M.; Qiao, S.; Liu, B.; Cao, Z.; Wang, R. A high-order state-of-charge estimation model by cubature particle filter. Measurement 2019, 146, 35–42. [Google Scholar] [CrossRef]
- Xing, D.; Wei, M.; Zhao, W.; Wang, Y.; Wu, S. Vehicle state estimation based on adaptive cubature particle filtering. J. Nanjing Univ. Aeronaut. Astronaut. 2020, 52, 445–453. [Google Scholar] [CrossRef]
- Gao, Z.; Mu, D.; Zhong, Y.; Gu, C. Constrained Unscented Particle Filter for SINS/GNSS/ADS Integrated Airship Navigation in the Presence of Wind Field Disturbance. Sensors 2019, 19, 471. [Google Scholar] [CrossRef]
- Seifzadeh, S.; Khaleghi, B.; Karray, F. Distributed soft-data-constrained multi-model particle filter. IEEE Trans. Cybern. 2015, 45, 384–394. [Google Scholar] [CrossRef]
- Xu, C.H.; Wang, X.; Duan, S.; Wan, J. Spatial-temporal constrained particle filter for cooperative target tracking. J. Netw. Comput. Appl. 2021, 176, 102913. [Google Scholar] [CrossRef]
- Zhang, H.; Li, L.; Xie, W. Constrained multiple model particle filtering for bearings-only maneuvering target tracking. IEEE Access 2018, 6, 51721–51734. [Google Scholar] [CrossRef]
- Xu, A.; Zou, X.; Qing, Y.; Fang, Q.; Sui, X. The improved cubature Kalman filter in GNSS/INS tightly coupled mode. Sci. Surv. Mapp. 2022, 47, 22–28. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S.; Hurd, T.R. Cubature Kalman filtering for continuous discrete systems: Theory and simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Gao, B.; Hu, G.; Zhu, X.; Zhong, Y. Robust cubature Kalman filter with abnormal observations identification using Mahalanobis distance criterion for vehicular INS/GNSS integration. Sensors 2019, 19, 5149. [Google Scholar] [CrossRef]
- Andrieu, C.; Doucet, A.; Holenstein, R. Particle markov chain Monte Carlo methods. J. R. Stat. Soc. Ser. B 2010, 72, 269–342. [Google Scholar] [CrossRef]
- Chen, J.G.; Li, J.; Gao, X.B. Particle filtering with equality state constraints. J. Univ. Electron. Sci. Technol. China 2011, 40, 596–601. [Google Scholar] [CrossRef]
- Simon, D.; Tien, L.C. Kalman filtering with state equality constraints. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 128–136. [Google Scholar] [CrossRef]
- Cui, P.Y.; Zheng, L.F.; Pei, F.J. Research on integrated navigation system based on self-adjust particle filter. Comput. Eng. 2008, 34, 185–187. [Google Scholar] [CrossRef]
- Crisan, D.; Doucet, A. A survey of convergence results on particle filtering methods for practitioners. IEEE Trans. Signal Process. 2002, 50, 736–746. [Google Scholar] [CrossRef]
- Hu, X.; Schön, T.B.; Ljung, L. A basic convergence result for particle filtering. IEEE Trans. Signal Process. 2008, 56, 1337–1348. [Google Scholar] [CrossRef]
- Fang, J.C.; Li, X.E.; Shen, G.X.; Fang, J.G.; Wang, Q.; Wan, D. Study of GPS/DR integrated navigation system for urban vehicle. China J. Highw. Transp. 1999, 12, 84–89. [Google Scholar]
- Zhao, Y.; Wang, N.; Ye, J.K. Constraints unscented particle filter and its application in vehicle navigation. J. Chang. Univ. Nat. Sci. Ed. 2020, 40, 109–116. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter | RMSE in East (m) | RMSE in North (m) | Error Range (m) | Overall RMSE (m) |
|---|---|---|---|---|
| PF | 4.1719 | 4.7618 | (−13.1, 14.0), (−14.5, 16.1) | 6.3308 |
| CPF | 3.7231 | 3.7504 | (−13.0, 11.1), (−13.0, 12.1) | 5.2846 |
| CCPF | 2.7061 | 2.5168 | (−8.1, 9.6), (−7.0, 7.1) | 3.6956 |
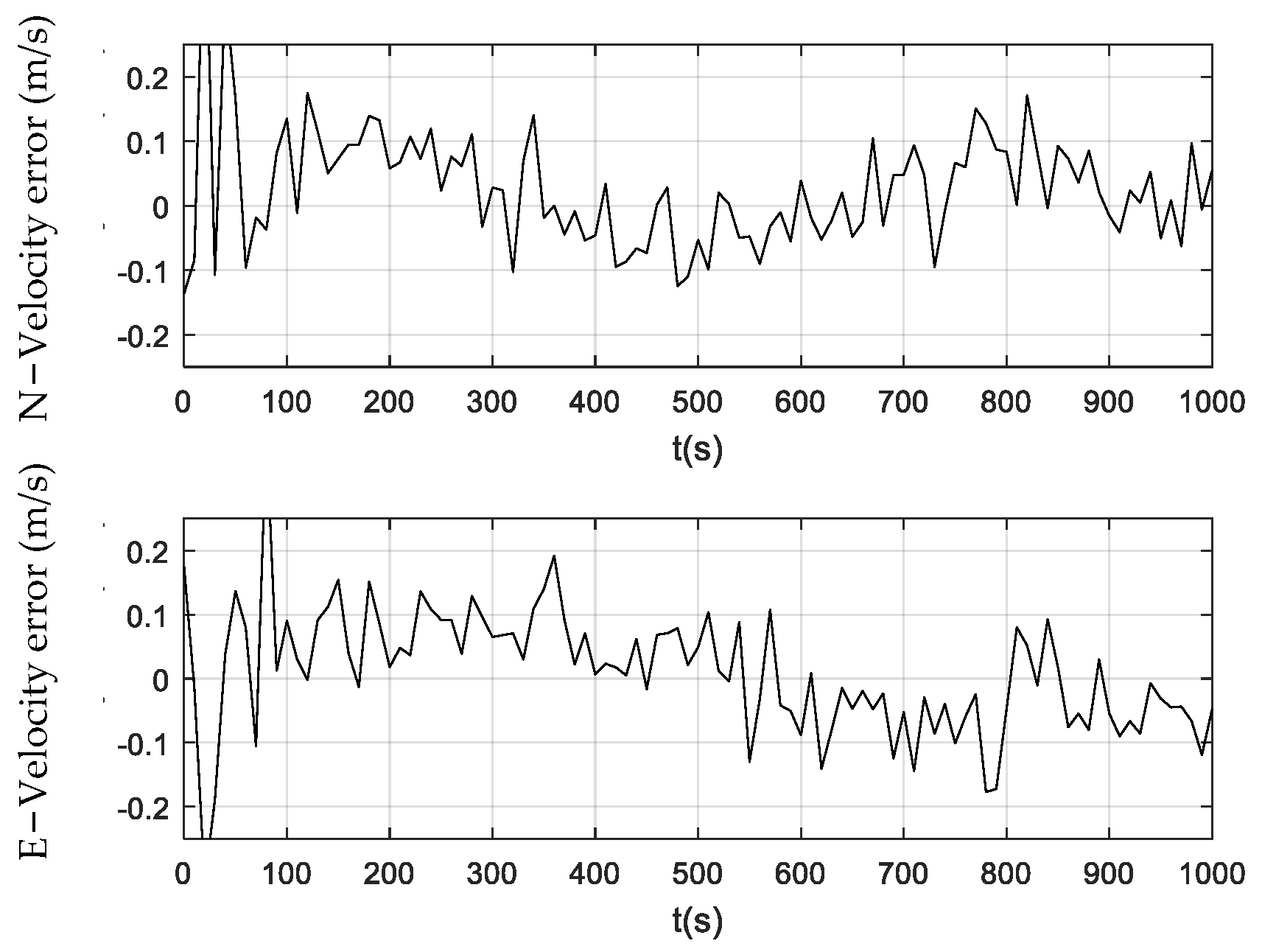
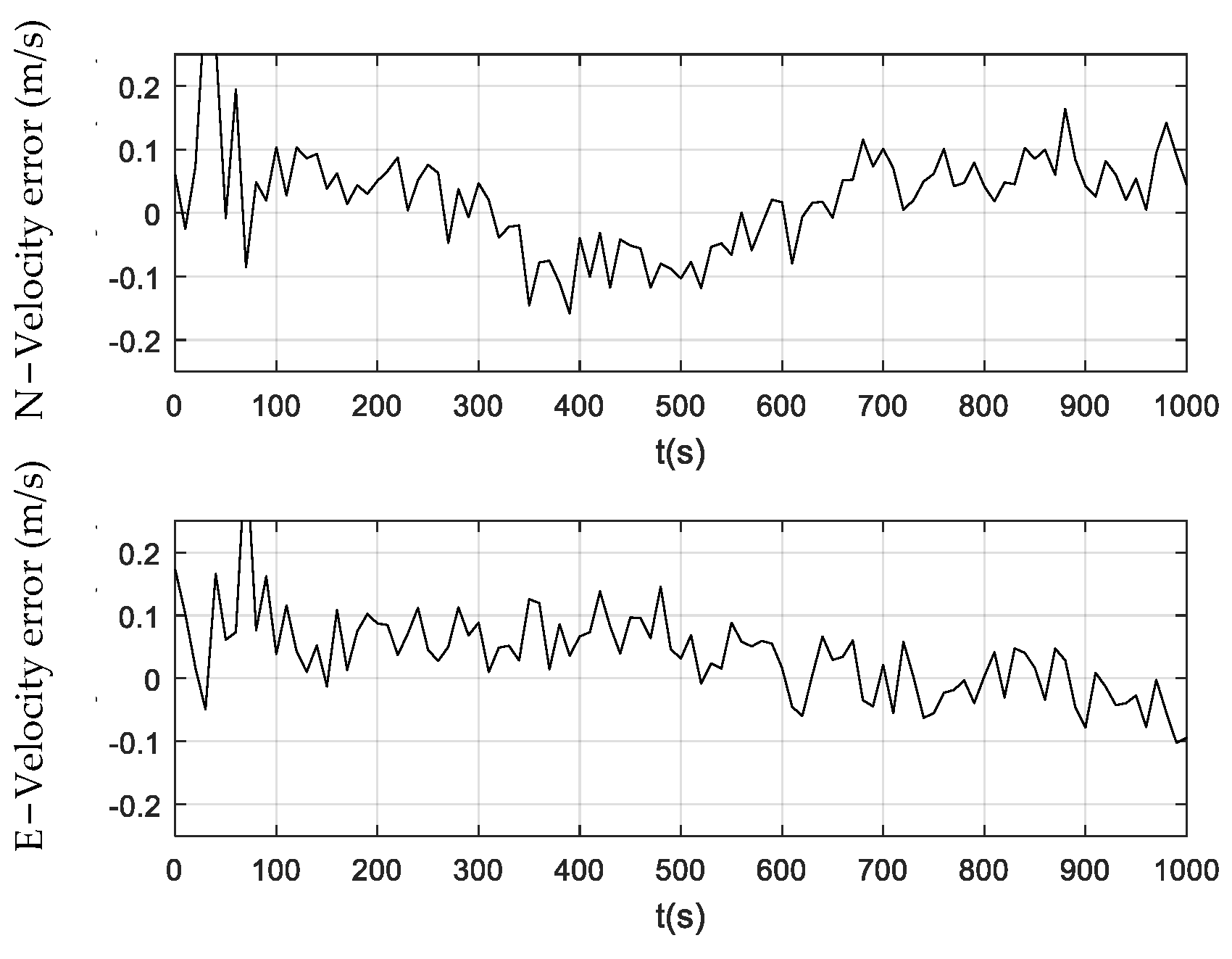
| Filter | RMSE in East (m/s) | RMSE in North (m/s) | Error Range (m/s) | Overall RMSE (m/s) |
|---|---|---|---|---|
| PF | 0.0912 | 0.1023 | (−0.24, 0.22), (−0.25, 0.21) | 0.1371 |
| CPF | 0.0892 | 0.0887 | (−0.11, 0.16), (−0.18, 0.19) | 0.1258 |
| CCPF | 0.0769 | 0.0674 | (−0.14, 0.15), (−0.10, 0.15) | 0.1022 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, L.; Zhong, Y.; Han, Y. Constrained Cubature Particle Filter for Vehicle Navigation. Sensors 2024, 24, 1228. https://doi.org/10.3390/s24041228
Xue L, Zhong Y, Han Y. Constrained Cubature Particle Filter for Vehicle Navigation. Sensors. 2024; 24(4):1228. https://doi.org/10.3390/s24041228
Chicago/Turabian StyleXue, Li, Yongmin Zhong, and Yulan Han. 2024. "Constrained Cubature Particle Filter for Vehicle Navigation" Sensors 24, no. 4: 1228. https://doi.org/10.3390/s24041228
APA StyleXue, L., Zhong, Y., & Han, Y. (2024). Constrained Cubature Particle Filter for Vehicle Navigation. Sensors, 24(4), 1228. https://doi.org/10.3390/s24041228