Robust Multivariable Estimation of the Relevant Information Coming from a Wheel Speed Sensor and an Accelerometer Embedded in a Car under Performance Tests

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Sensors
2.1. Accelerometers
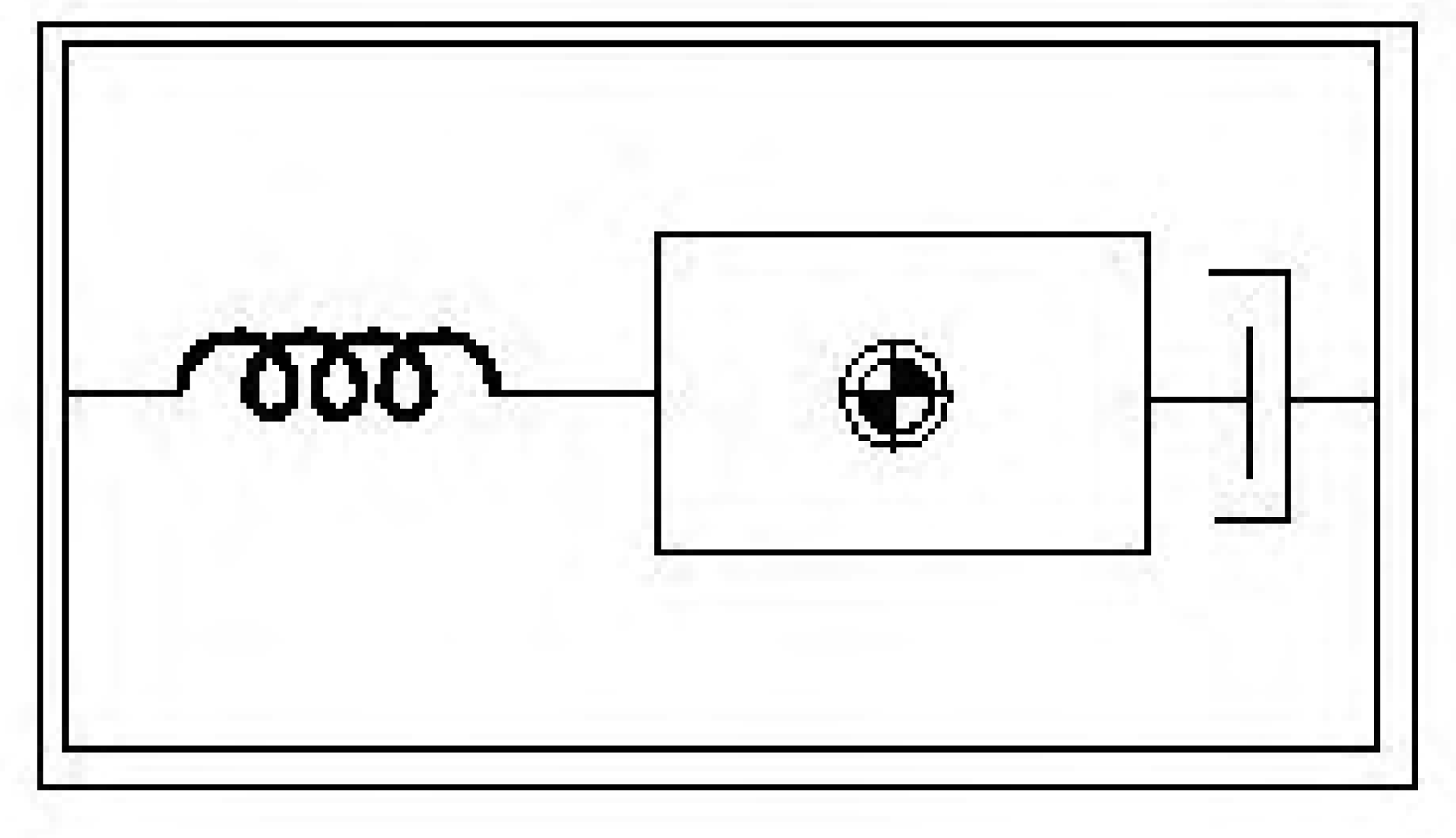
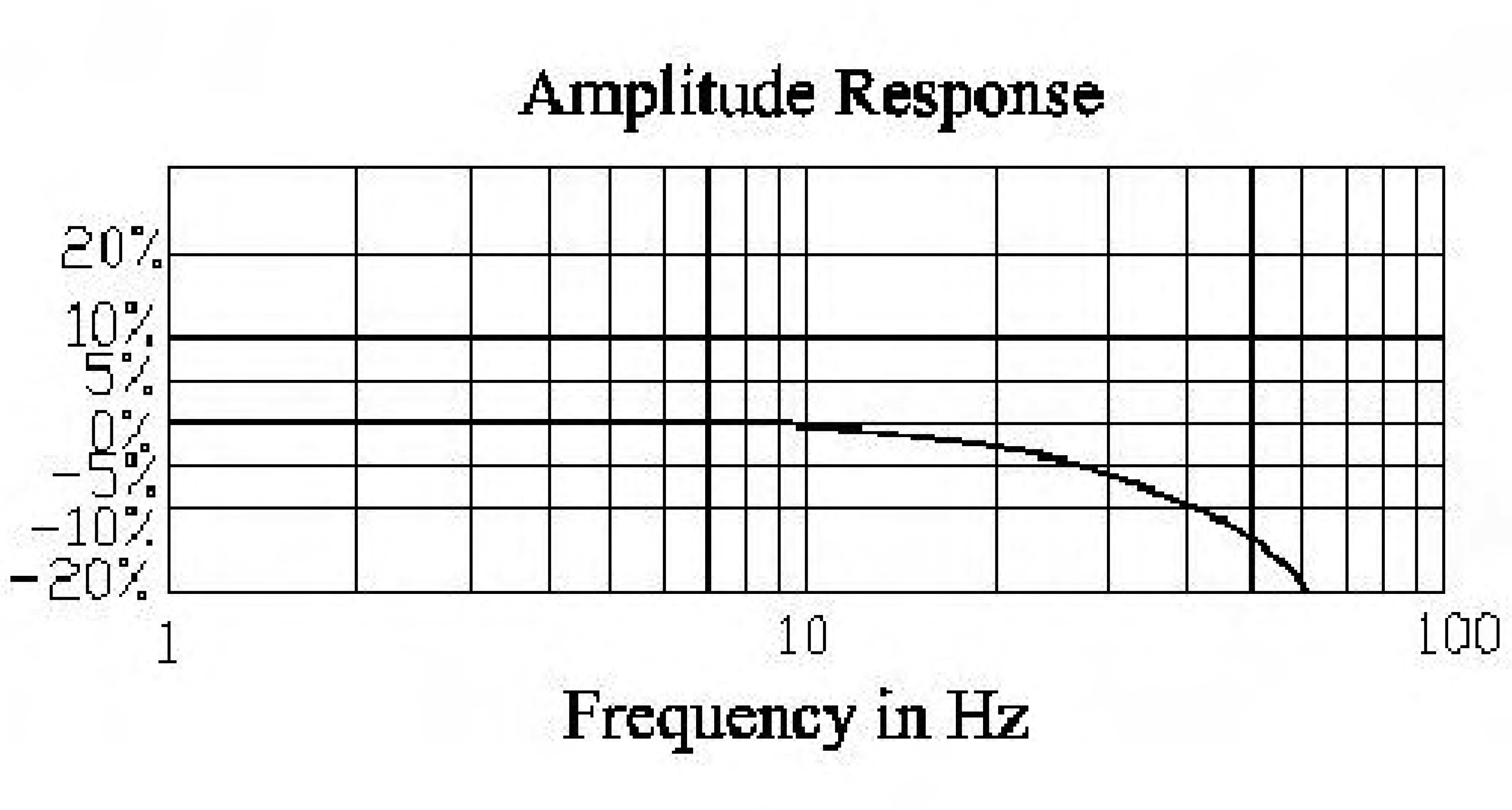
2.1.1. Principles
2.1.2. Types of accelerometers
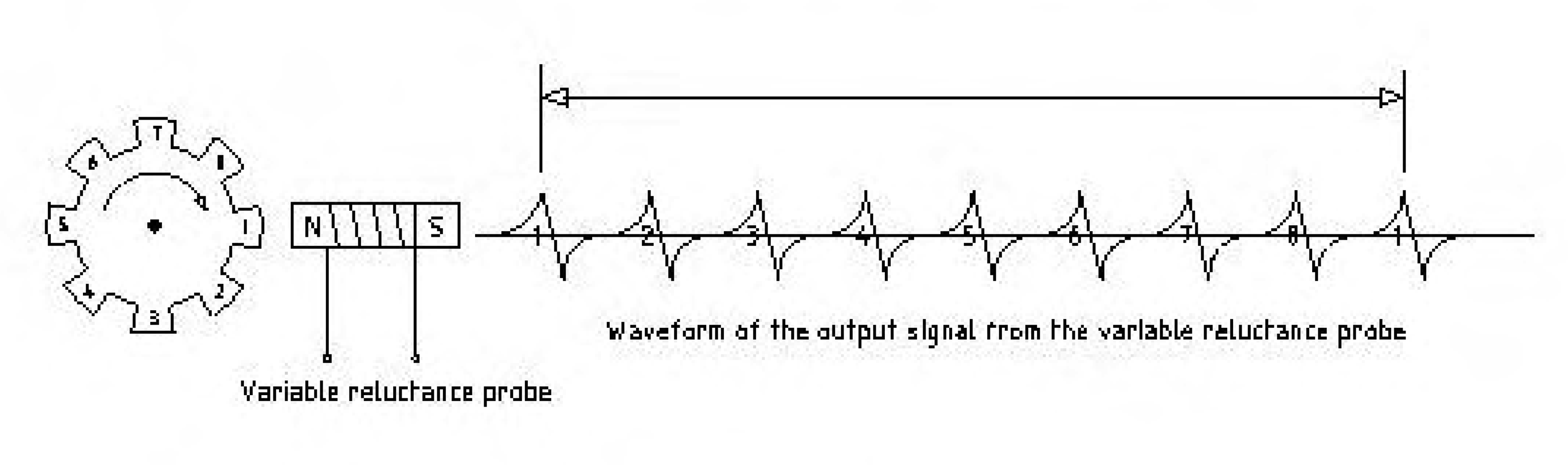
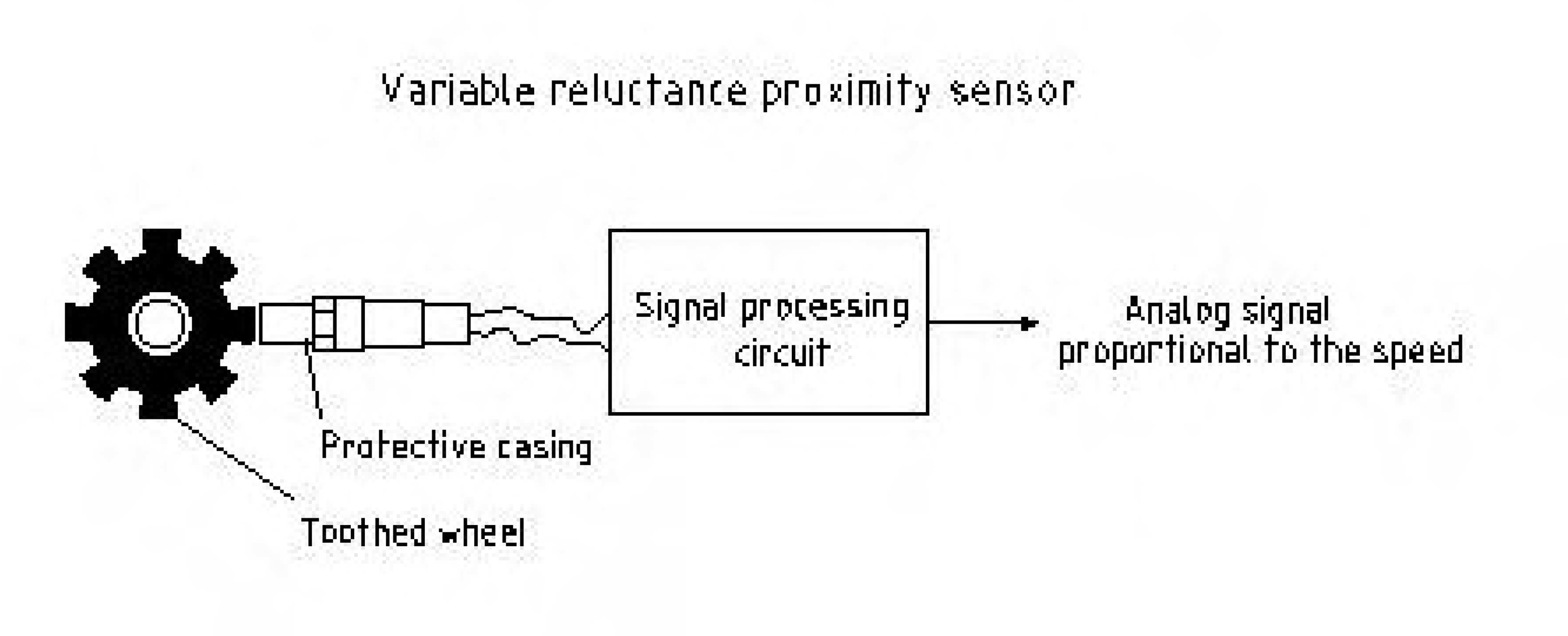
2.2. Wheel speed sensors
2.2.1. Principles
2.2.2. Considerations
3. Design of the robust and optimal multi-input multi-output system
3.1. Introduction
3.2. Modeling of the sensors as a multi-input multi-output dynamic system
3.3. The LQG/LTR method
3.4. Design of the loop transfer function
4. The results of the experiment
5. Conclusions
Acknowledgments
References
- Hernandez, W. Fluxgate magnetometer for magnetic fields in the range 1-100mT. IEE Electronics Letters 1995, 31, 2110–2111. [Google Scholar]
- Hernandez, W. Magnetic-field sensor based on a relaxation oscillator. Sensors and Actuators A 1996, 55, 163–166. [Google Scholar]
- Rodriguez, F.; Trujillo, H.; Hernandez, W. A simple bandgap type magnetoamplifier. Sensors and Actuators A 1996, 55, 133–137. [Google Scholar]
- Hernandez, W. Improving the response of an accelerometer by using optimal filtering. Sensors and Actuators A 2001, 88, 198–208. [Google Scholar]
- Hernandez, W. Improving the response of several accelerometers used in a car under performance tests by using Kalman filtering. Sensors 2001, 1, 38–52. [Google Scholar]
- Hernandez, W. Improving the response of a wheel speed sensors by using an adaptive line enhancer. Measurements 2003, 33, 229–240. [Google Scholar]
- Hernandez, W. Improving the response of a wheel speed sensors by using frequency-domain adaptive filtering. IEEE Sensors Journal 2003, 3, 404–413. [Google Scholar]
- Hernandez, W. Improving the response of wheel speed sensors by using robust and optimal signal processing techniques. IEEE International Symposium on Industrial Electronics, ISIE2005, Dubrovnik, Croatia, June 20–23; 2005; pp. 1049–1053. [Google Scholar]
- Hernandez, W. Wheel speed sensors. In Encyclopedia of Sensors; Grimes, C. A., Dickey, E. C., Pishko, M. V., Eds.; American Scientific Publishers; in press.
- Dean, M. Semiconductor and Conventional Strain Gages; Academic Press, 1962. [Google Scholar]
- Canfield, E. B. Electromechanical Control Systems and Devices; Wiley, 1965. [Google Scholar]
- Keast, D. N. Measurements in Mechanical Dynamics; McGraw-Hill, 1968. [Google Scholar]
- Farago, F. T. Handbook of Dimensional Measurements; Industrial Press, 1968. [Google Scholar]
- Norton, H. N. Handbook of Transducers for Electronic Measuring Systems; Prentice-Hall, 1970. [Google Scholar]
- Norton, H. N. Sensor and Analyzer Handbook; Prentice-Hall, 1982. [Google Scholar]
- Herceg, E. E. Handbook of Measurement and Control; Schaevitz Engineering: Camden, New Jersey, 1972. [Google Scholar]
- Mansfield, P. H. Electrical Transducers for Industrial Measurement; Butterworths, 1973. [Google Scholar]
- Fertis, D. G. Dynamics and Vibration of Structures; Wiley-Interscience, 1973. [Google Scholar]
- Meirovitch, L. Elements of Vibration Analysis; McGraw-Hill, 1975. [Google Scholar]
- Gregory, B. A. Introduction to Electrical Instrumentation and Measurement Systems; Macmillan, 1981. [Google Scholar]
- Beckwith, T. G.; Buck, N. L.; Marangoni, R. D. Mechanical Measurements, Third Edition ed; Addison-Wesley, 1982. [Google Scholar]
- Beckwith, T. G.; Marangoni, R. D.; Lienhard, J. H. Mechanical Measurements, Fifth Edition ed; Addison-Wesley, 1993. [Google Scholar]
- Carr, J. J. Elements of Electronic Instrumentation and Measurements, Third Edition ed; Prentice-Hall, 1995. [Google Scholar]
- Johnson, C. D. Process Control Instrumentation Technology, Fifth Edition ed; Prentice-Hall, 1997. [Google Scholar]
- Edgar, P. Sensors for Measurement and Control; Addison-Wesley Longman, 1998. [Google Scholar]
- Robert Bosch GmbH (Hrsg.). In Kraftfahrtechnisches Taschenbuch, 25th Ed. ed; Vieweg Verlag, 2004.
- Fleming, W. J. Overview of automotive sensors. IEEE Sensors Journal 2001, 1, 296–308. [Google Scholar]
- Kwakernaak, H. Optimal low-sensitivity linear feedback systems. Automatica 1969, 5, 279–285. [Google Scholar]
- Athans, M. The role and use of stochastic linear-quadratic gaussian problem in control system design. IEEE Transactions on Automatic Control 1971, 16, 529–552. [Google Scholar]
- Kwakernaak, H.; Sivan, R. Linear Optimal Control Systems; Wiley-Interscience, 1972. [Google Scholar]
- Safonov, M. G.; Athans, M. Gain and phase margin of multiloop LQG regulators. IEEE Transactions on Automatic Control 1977, 22, 173–178. [Google Scholar]
- Doyle, J. C. Guaranteed margins for LQG regulators. IEEE Transactions on Automatic Control 1978, 23, 756–757. [Google Scholar]
- Doyle, J. C.; Stein, G. Robustness with observers. IEEE Transactions on Automatic Control 1979, 24, 607–611. [Google Scholar]
- Safonov, M. G. Stability and Robustness of Multivariable Feedback Systems; MIT Press, 1980. [Google Scholar]
- Safonov, M. G.; Laub, A. J.; Hartman, G. Feedback properties of multivariable systems: The role and use of return difference matrix. IEEE Transactions on Automatic Control 1981, 26, 47–65. [Google Scholar]
- Doyle, J. C.; Stein, G. Multivariable feedback design: Concepts for a classical/modern synthesis. IEEE Transactions on Automatic Control 1981, 26, 4–16. [Google Scholar]
- Friedland, B. Control System Design; McGraw-Hill, 1986. [Google Scholar]
- Francis, B. A Course in H∞ Control Theory; Springer-Verlag, 1987. [Google Scholar]
- Maciejowski, J. M. Multivariable Feedback Design; Addison-Wesley, 1989. [Google Scholar]
- Anderson, B. D.; Moore, J. B. Optimal Control: Linear Quadratic Methods; Prentice-Hall, 1989. [Google Scholar]
- Ackerman, J.; Bartlett, A.; Kaesbauer, D.; Sienel, W. Robust Control: Systems with Uncertain Plant Parameters; Springer, 1993. [Google Scholar]
- Engelbert, H. J.; Karatzas, I.; Rockner, M. Stochastic Processes and Optimal Control; Gordon & Breach Science Publications, 1993. [Google Scholar]
- Stengel, R. F. Optimal Control and Estimation; Dover Publications, 1994. [Google Scholar]
- Pavel, N. H. Optimal Control of Differential Equations; Marcel Dekker, 1994. [Google Scholar]
- Lewis, F. L; Syrmos, V.L. Optimal Control, 2nd Edition ed; Wiley-Interscience, 1995. [Google Scholar]
- Basar, T.; Bernhard, P. H∞Optimal Control and Related Minimax Design Problems: A Dynamic Game Approach, 2nd Edition ed; Birkhauser, 1995. [Google Scholar]
- Saberi, A.; Sannuti, A.; Chen, B. M. H2Optimal Control; Prentice-Hall, 1995. [Google Scholar]
- Whittle, P. Optimal Control: Basics and Beyond; John Wiley & Sons, 1996. [Google Scholar]
- Skoghestad, S.; Postlethwaite, I. Multivariable Feedback Control; John Wiley & Sons, 1996. [Google Scholar]
- Zhou, K.; Doyle, J. C.; Glover, K. Robust and Optimal Control; Prentice-Hall, 1996. [Google Scholar]
- Hager, W. W.; Pardalos, P. M. Optimal Control: Theory, Algorithms and Applications; Springer, 1998. [Google Scholar]
- Burl, J. B. Linear Optimal Control; Prentice-Hall, 1998. [Google Scholar]
- Vinter, R. Optimal Control; Birkhauser, 2000. [Google Scholar]
- Locatelli, A. Optimal Control: An Introduction; Birkhauser, 2001. [Google Scholar]
- Naidu, D. S. Optimal Control Systems; CRC Press, 2002. [Google Scholar]
- Ackerman, J. Robust Control: The Parameter Space Approach, 2nd Edition ed; Springer, 2002. [Google Scholar]
- Bryson, A. E. Applied Linear Optimal Control: Examples and Algorithms; Cambridge University Press, 2002. [Google Scholar]
- Burghes, D.; Graham, A. Control Theory and Optimal Control; Albion/Horwood Publications, 2003. [Google Scholar]
- Hull, G. D. Optimal Control Theory for Applications; Springer, 2003. [Google Scholar]
- Kirk, D. E. Optimal Control Theory: An Introduction; Dover Publications, 2004. [Google Scholar]
- Doob, J. L. Stochastic Processes; John Wiley & Sons, 1953. [Google Scholar]
- Dynkin, E. B. Markov Processes; Springer-Verlag, 1965. [Google Scholar]
- Papoulis, A. Probability, Random Variables, and Stochastic Processes, Fourth Edition ed; McGraw-Hill, 2001. [Google Scholar]
- Hernandez, W. Robust Control of DC-DC Switching Converters and Low Distortion Audio Power Amplifiers. Ph.D. dissertation, Department of Electronics, Universitat Ramón Llull, Barcelona, Spain, 1999. [Google Scholar]
- Hernandez, W.; Mayer, A. Robust frequency compensation of a low distortion audio power amplifier based on the listener perception. International Symposium on Quantitative Feedback Theory and Frequency Domain Methods, Durban, South Africa, August 26 – 27; 1999; pp. 75–78. [Google Scholar]
- Hernandez, W.; Mayer, A.; Alvarez, A. Robust control applied to a dc-dc step-down switching regulators for 14/42V hybrid architectures. In FISITA World Automotive Congress, FISITA2004; Barcelona, Spain, May 23-27 2004. [Google Scholar]
- Hernandez, W.; Mayer, A.; Alvarez, A. H∞control of a step-down dc-dc switching regulator for 14/42V hybrid architectures of next-generation cars. 30th Annual Conference of the IEEE Industrial Electronics Society, IECON 2004, Busan, Korea, November 2–6; 2004; pp. 442–447. [Google Scholar]
- Kalman, R. E. Contributions to the theory of optimal control. Proc. 1959 Mexico City Conference on Differential Equations, Mexico City, Mexico; 1960; pp. 102–199. [Google Scholar]
- Kleinman, D. L. On iterative technique for Riccati equation computation. IEEE Transactions on Automatic Control 1968, 3, 114–115. [Google Scholar]
- Lasiecka, L.; Triggiani, R. Differential and Algebraic Riccati Equations with Applications to Boundary /Point Control Problems: Continuous Theory and Approximation Theory. In Lecture Notes in Control and Information Science; vol. 164, Springer-Verlag, 1991. [Google Scholar]











© 2005 by MDPI ( http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
Hernandez, W. Robust Multivariable Estimation of the Relevant Information Coming from a Wheel Speed Sensor and an Accelerometer Embedded in a Car under Performance Tests. Sensors 2005, 5, 488-508. https://doi.org/10.3390/s5110488
Hernandez W. Robust Multivariable Estimation of the Relevant Information Coming from a Wheel Speed Sensor and an Accelerometer Embedded in a Car under Performance Tests. Sensors. 2005; 5(11):488-508. https://doi.org/10.3390/s5110488
Chicago/Turabian StyleHernandez, Wilmar. 2005. "Robust Multivariable Estimation of the Relevant Information Coming from a Wheel Speed Sensor and an Accelerometer Embedded in a Car under Performance Tests" Sensors 5, no. 11: 488-508. https://doi.org/10.3390/s5110488
APA StyleHernandez, W. (2005). Robust Multivariable Estimation of the Relevant Information Coming from a Wheel Speed Sensor and an Accelerometer Embedded in a Car under Performance Tests. Sensors, 5(11), 488-508. https://doi.org/10.3390/s5110488