Improving Ship Detection with Polarimetric SAR based on Convolution between Co-polarization Channels

Abstract
:1. Introduction
2. The theory and the analysis of simulated images
2.1 The convolution between co-polarization channels HH and VV
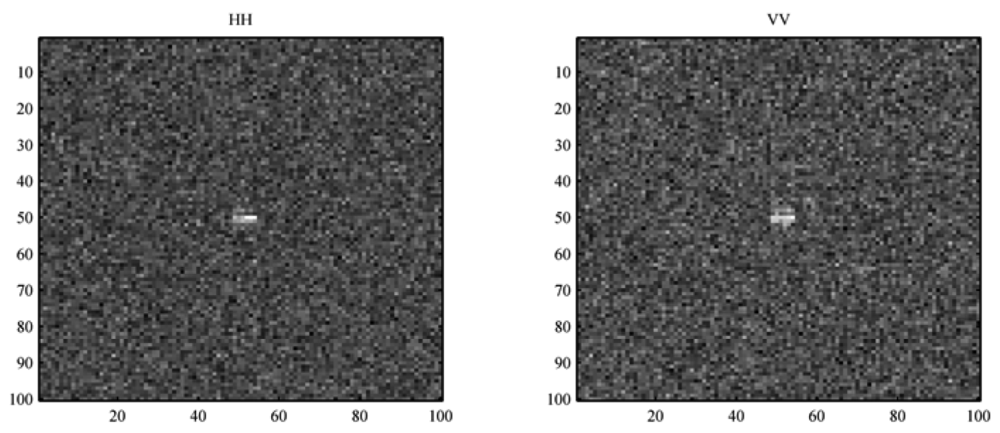
- Extract the sub-window from each channel,
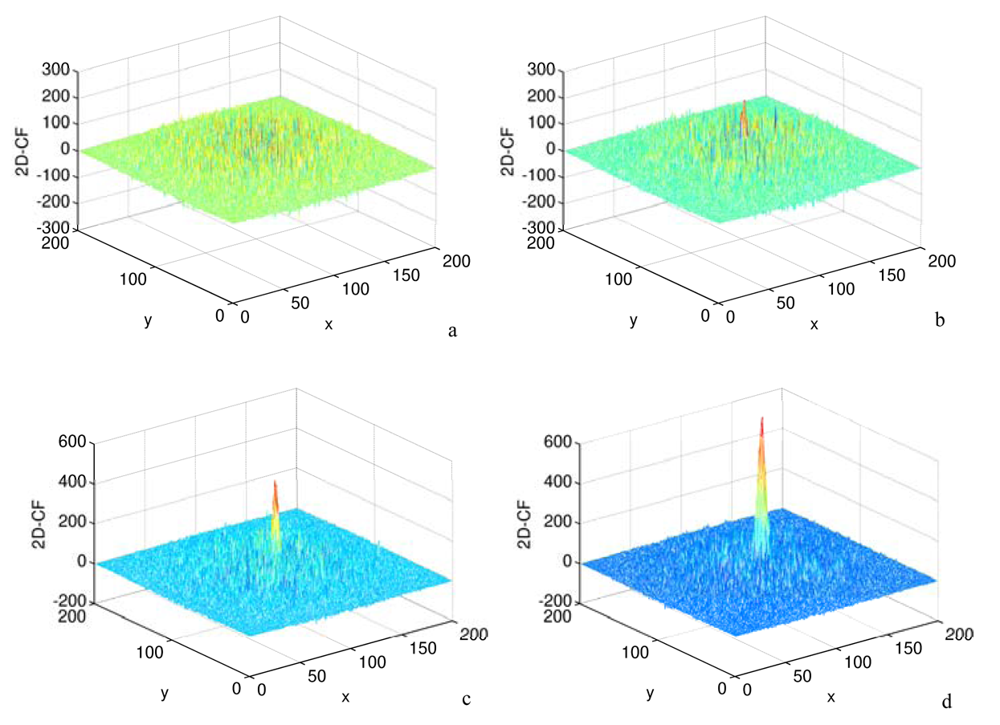
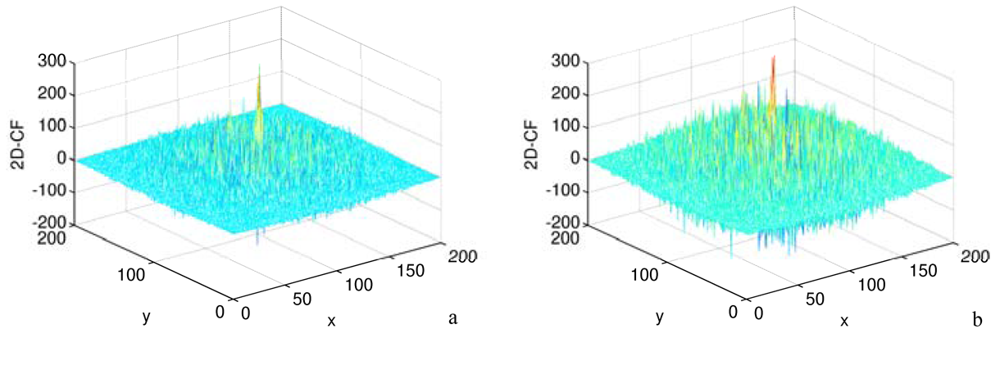
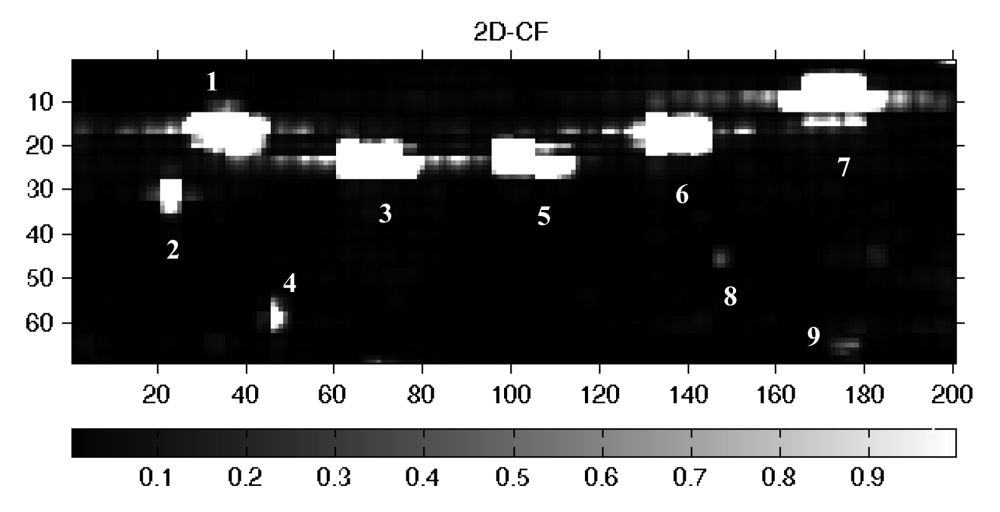
- Calculate the 2D-CF between the two co-polarization images,
- If the 2D-CF has a peak, the sub-window is judged to contain a ship,
- Process the entire images by moving the sub-window to the next area.
2.2 The results of simulative SAR images
2.2.1 The variation of ship size
2.2.2 The variation of sea state
2.2.3 The change of ships' shape
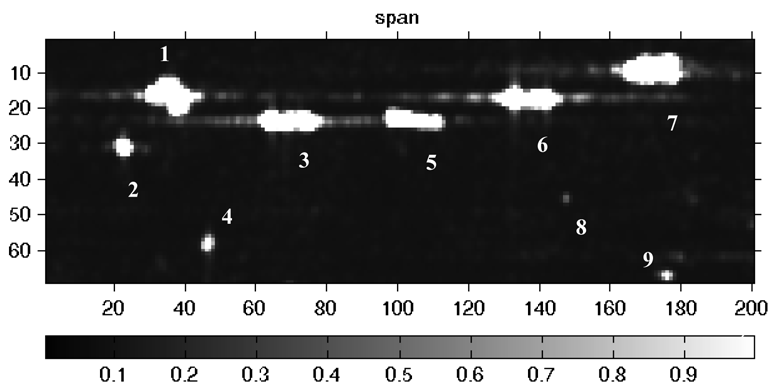
3. Analysis of SIR-C/X SAR image
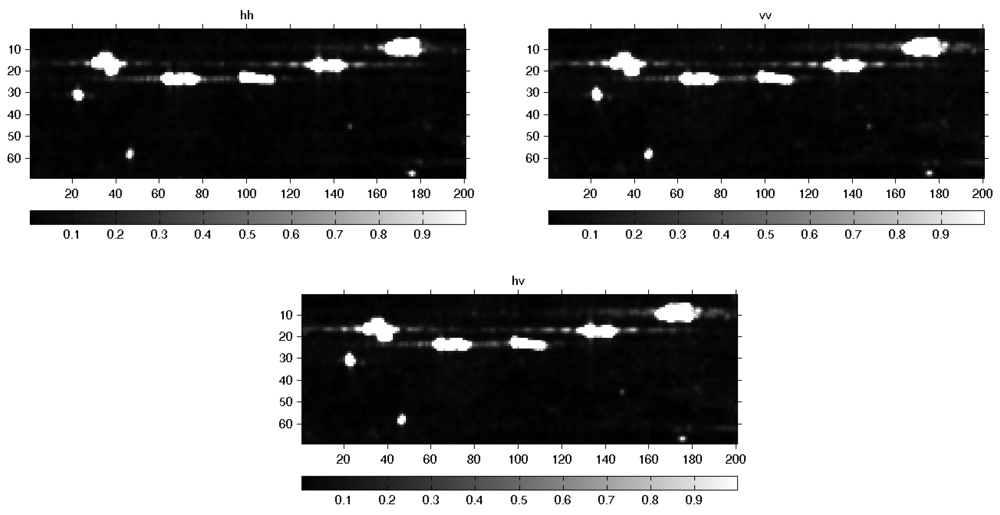
3.1 Test data description
3.2 The choice of window
3.3 Application the method to the SAR image
4. Comparison with other algorithms
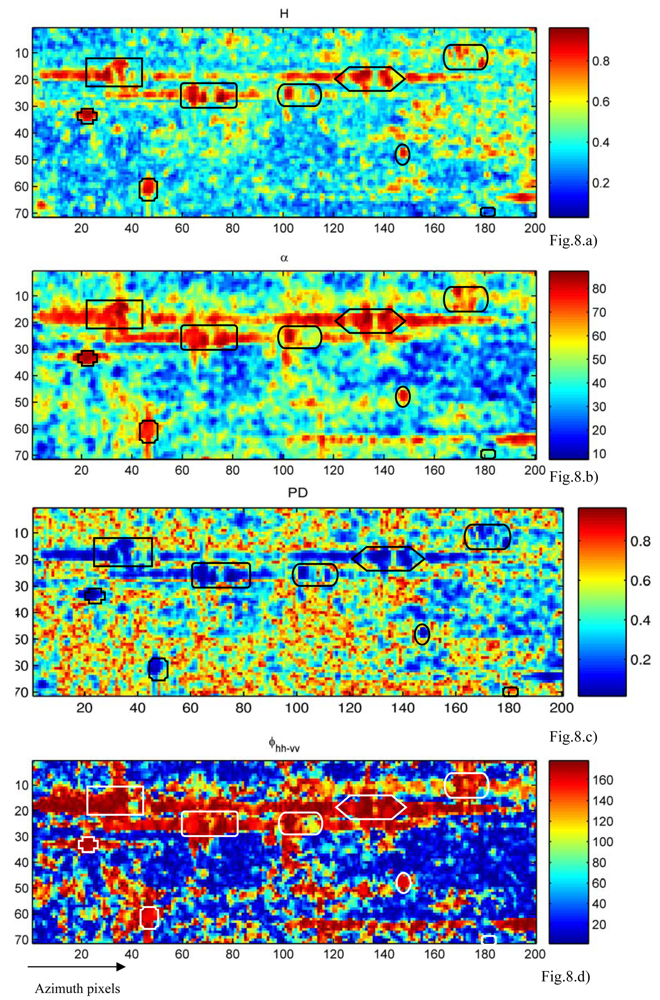
4.1 Comparison with polarimetric parameters
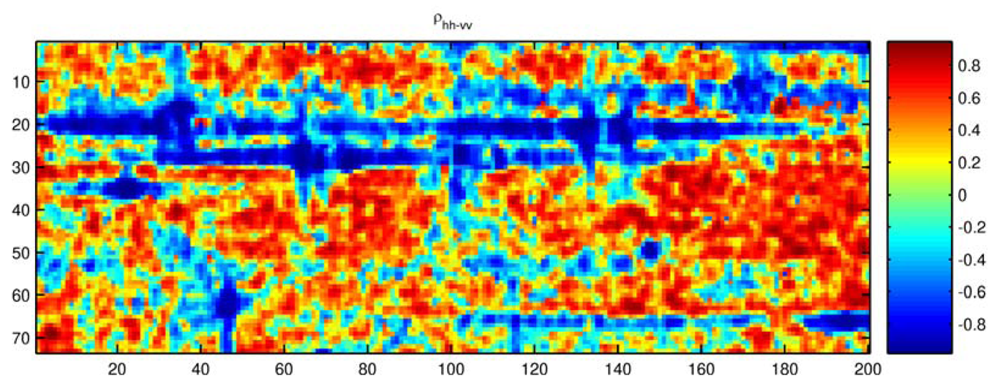
4.2. Comparison with polarimetric correlation coefficient
4.3. Comparison with CFAR
5. Test of 2D-CF with AIRSAR data
6. Conclusions
Acknowledgments
References
- Eldhuset, K. Principles and performance of an automated ship detection system for SAR images. IEEE 1989 International Geoscience and Remote Sensing Symposium; 1989; pp. 358–361. [Google Scholar]
- Rey, M.; Tunaley, J.K.E.; Folinesbee, J.T. Aplication of radon transform techniques to wake detection of Seasat-A SAR images. IEEE Trans. Geosci. Remote Sensing 1990, 28, 553–560. [Google Scholar]
- Copeland, A.C.; Ravichan., G.; Trivedi, M.M. Localized radon transform- based detection of ship wakes in SAR images. IEEE Trans. Geosci. Remote Sensing 1995, 33, 35–45. [Google Scholar]
- Eldhuset, K. An automatic ship and ship wake detection system for spaceborne SAR images in coastal regions. IEEE Trans. Geo. and Remote Sensing 1996, 34, 1010–1019. [Google Scholar]
- Lin, I-I.; Kwoh, L.K.; Lin, Y.C.; Khoo, V. Ship and ship wake detection in the ERS SAR imagery using computer-based algorithm. IEEE 1997 International Geoscience and Remote Sensing Symposium; 1997; pp. 151–153. [Google Scholar]
- Zhou, H.J. Apply Randon transform to detect narrow-v ship wake in SAR images. Chinese Journal of Image and Graphics 2000, 5, 901–905. [Google Scholar]
- Wang, Sh.Q.; Jin, Y.Q. Ship wake detection in SAR imagery based on Randon transform and morphologic images processing. Chinese Journal of remote sensing 2001, 5, 289–294. [Google Scholar]
- Vachon, P.W.; Campbell, J.W.M.; Bjerkelund, C.A.; Dobson, F.W.; Rey, M.T. Ship detection by the RADARSAT SAR: Validation of detection model predictions. Canadian Journal of Remote Sensing 1997, 23, 48–59. [Google Scholar]
- Vachon, P.W.; Adlakha, P.; Edel, H.; Henschel, M.; Ramsay, B.; Flett, D.; Rey, M.; Staples, G.; Thomas, S. Canadian progress toward marine and coastal applications of synthetic aperture radar. Johns Hopkins APL Technical Digest 2000, 21, 33–40. [Google Scholar]
- Wackerman, C.C.; Friedman, K.S.; Pichel, W.G.; Clemente-Colon, P.; Li, X. Automatic detection of ships in RADARSAT-1 SAR imagery. Canadian Journal of Remote Sensing 2001, 27, 568–577. [Google Scholar]
- Ringrose, R.; Nicola, H. Ship detection using polarimetric SAR data. Proc. of the CEOS SAR workshop; ESAS, 1999; p. 450. [Google Scholar]
- Cameron, W.L.; Youssef, N.; Leung, L.K. Simulated polarimetric signatures of primitive geometrical shapes. IEEE Trans. Geosci. Remote Sensing 1996, 34, 793–803. [Google Scholar]
- Yeremy, M.; Campbell, J.W.M.; Mattar, K.; Potter, T. Ocean surveillance with polarimetric SAR. Canadian Journal of Remote Sensing 2001, 27, 328–344. [Google Scholar]
- Van Zyl, J.J. Unsupervised Classification of Scattering behaviour using Radar polarimetry data. IEEE Trans. Geosci. Remote Sensing 1989, 27(1), 36–44. [Google Scholar]
- Touzi, R.; Charbonneau, F.J.; Hawkins, R.K.; Vachon, P.W. Ship detection and characterization using polarimetric SAR. Canada Journal Remote Sensing 2004, 30, 552–559. [Google Scholar]
- Touzi, R. Calibrated polarimetric SAR data for ship detection. IEEE 2000 International Geoscience and Remote Sensing Symposium; 2000; 1, pp. 144–146. [Google Scholar]
- Touzi, R.; Charbonneau, F.; Hawkins, R.H. Ship-Sea contrast Optimization When using polarimetric SAR. IEEE 2001 International Geoscience and Remote Sensing Symposium; 2001; 1, pp. 426–428. [Google Scholar]
- Touzi, R.; Keith, R.; Francois, C. On the use of permanent symmetric scatters for ship characterization. IEEE Trans. Geosci. Remote Sensing 2004, 42(10), 2039–2044. [Google Scholar]
- Arnaud, A. Ship detection by SAR interferometry. IEEE 1999 International Geoscience and Remote Sensing Symposium; 1999; 5, pp. 2616–2618. [Google Scholar]
- Iehara, M.; Ouchi, K.; Takami, I.; Morimura, K.; Kumano, S. Detection of ships using convolution of split-look SAR images. IEEE 2001 International Geoscience and Remote Sensing Symposium; 2001; 4, pp. 1807–1809. [Google Scholar]
- Ouchi, K.; Yaguchi, H. Simulation on the extraction of ships' images embedded in speckle using convolution of multilook SAR images and applications to Radarsat data. IEEE 2002 International Geoscience and Remote Sensing Symposium; 2002; 4, pp. 2498–2500. [Google Scholar]
- Ouchi, K. Ship detection based on coherence images derived from cross correlation of multilook SAR images. IEEE Trans. Geosci. Remote Sensing Letter 2004, 1, 184–187. [Google Scholar]
- Bracewell, R. Convolution and Two-Dimensional Convolution. In The Fourier Transform and Its Applications, 3rd ed.; McGraw-Hill: New York; Volume 1999, Ch. 3.
- Jiang, Q. Sh.. Detection de bateaux dans les images de radar a ouverture synthetique. Ph. D Thesis, National Library of Canada, AAINQ80535. 2002. [Google Scholar]
- Cloude, S.R.; Pottier, E. Concept of polarization entropy in optical scattering. Optical Engineering 1995, 34, 1599–1610. [Google Scholar]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sensing 1996, 34, 498–518. [Google Scholar]
- Cloude, S.R.; Pottier, E. Application of the H/A/alpha polarimetric decomposition theorem for land classification. Proceeding of SPIE 1997, 3120, 132–143. [Google Scholar]
- Ferro-Famil, L.; Pottier, E.; Lee, J.S. Unsupervised classification of multi-frequency and fully polarimetric SAR images based on H/A/Alpha-Wishart classifier. IEEE Trans. Geosci. Remote Sensing 2001, 39, 2332–2342. [Google Scholar]
- Diane, L. Radar Polarimetry: Analysis Tools and Applications. IEEE Trans. Geosci. Remote Sensing 1988, 26, 774–789. [Google Scholar]
- Liu, C.; Vachon, P.W.; Geling, G.W. Improved ship detection with airborne polarimetric SAR data. Canada Journal Remote Sensing 2005, 31, 122–131. [Google Scholar]
- Lee, J.S.; Hoppel, K.W.; Mango, S.A.; Miller, A.R. Intensity and phase statistics of multilook polarimetric and interferometric SAR imagery. IEEE Trans. Geosci. Remote Sensing 1994, 32, 1017–1028. [Google Scholar]
- Toshifumi, M. A study on polarimetric correlation coefficient for feature extraction of polarimetric SAR data. IEICE Institute of Electronics, Information and Communication Engineers 2005, E88-B, 2353–2361. [Google Scholar]
- Cusano, M. A real timeoperational scheme for ship traffic monitoring using quick look ERS SAR images. IEEE 2000 International Geoscience and Remote Sensing Symposium; 2000; 7, pp. 2918–2920. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ocean | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Max_b_c | 7.4×10-2 | 5.7×101 | 2.7×101 | 8.8×101 | 2.1 | 5.1×101 | 2.5×102 | 1.4×102 | 3.7×10-1 | 1.5 |
| Max_a_c | 2.3×10-2 | 2.0×104 | 2.5×103 | 1.8×104 | 1.4×101 | 1.2×103 | 6.4×104 | 4.5×104 | 4.2×10-1 | 4.8×10-1 |
| Mean_b_c | 1.3×10-2 | 8.1 | 4.8 | 1.3×101 | 7.0×10-1 | 4.9 | 1.4×101 | 1. 5×101 | 1.1×10-1 | 3.2×10-1 |
| Mean_a_c | 3.6×10-3 | 1.7×103 | 4.9×102 | 1.8×103 | 1.8 | 1.2×102 | 1.8×103 | 5.0×103 | 1.9×10-1 | 1.6×10-1 |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Li, H.; He, Y.; Wang, W. Improving Ship Detection with Polarimetric SAR based on Convolution between Co-polarization Channels. Sensors 2009, 9, 1221-1236. https://doi.org/10.3390/s90201221
Li H, He Y, Wang W. Improving Ship Detection with Polarimetric SAR based on Convolution between Co-polarization Channels. Sensors. 2009; 9(2):1221-1236. https://doi.org/10.3390/s90201221
Chicago/Turabian StyleLi, Haiyan, Yijun He, and Wenguang Wang. 2009. "Improving Ship Detection with Polarimetric SAR based on Convolution between Co-polarization Channels" Sensors 9, no. 2: 1221-1236. https://doi.org/10.3390/s90201221
APA StyleLi, H., He, Y., & Wang, W. (2009). Improving Ship Detection with Polarimetric SAR based on Convolution between Co-polarization Channels. Sensors, 9(2), 1221-1236. https://doi.org/10.3390/s90201221