1. Introduction
The intensive management pattern in China is gradually developing under the guidance of land operation rights reformation policies, due to the fact that new agricultural operators represented by major professional households, family farms, farmer cooperatives and leading enterprises of agricultural industrialization have been emerging, and the land transferring area has accounted for 35% of the total land contracted by households since 2017 [
1]. However, under the intensive management pattern, China’s agricultural production has increasingly relied on chemical fertilizers, pesticides, plastic film and other modern means, and adopted the modern agricultural production mode characterized by high input, yield and waste [
2,
3]. These extensive production means and modes have resulted in greatly improved efficiency of agricultural production, while sacrificed agricultural ecological environment [
4,
5], such as polluted rural water and soil [
6,
7]. In agricultural production activities, dissolved or solid pollutants, such as soil particles, nitrogen, phosphorus, and pesticide heavy metals in farmland, would cause agricultural non-point source pollution. According to China’s statistical yearbook of 2017, the average amount of nitrogen used in China reached 443 kg per hectare in 2016, far exceeding the internationally recognized safe limit of 225 kg per hectare [
8]. In addition, the heavy metal spot level in farmland soil of major grain-producing areas in China has excessed to 21.5% [
9]. Thus, agricultural non-point source pollution in China under the intensive management pattern has been characterized as cluster, explosion and crossover, for which the agricultural ecological environment has suffered serious damage [
10,
11].
In order to enhance agricultural sustainability and extend intensive production practices, China’s government has taken a series of major policies and measurements on agricultural non-point source pollution control, including adopting new technologies of agricultural non-point source pollution control (e.g., soil formula fertilization technology, constructed wetland technology, film mulching drip irrigation and zero-discharge pig-raising technologies of biological fermentation houses, etc.) and subsidies for using organic fertilizers. At the same time, the prisoner dilemma still exists in agricultural non-point source pollution control [
12]. This is mainly caused by the lack of proactive motivation to pollution control among stakeholders [
13,
14], who are engaged in agricultural production consisting of new agricultural operators and traditional farmers [
15]. Although the central government has invested and implemented a series of pollution control measures, local governments and agricultural producers have been inconsistent in the co-governance of agricultural non-point source pollution control. The reason is that local governments would deregulate agricultural non-point source pollution control and connive their polluting behavior of agricultural production to gain more local economic profits [
16]. Furthermore, agricultural ecological environmental resources belong to the public goods [
17], while agricultural non-point source pollution control has a typical positive externality. As such, new agricultural operators and traditional farmers’ environmental consumption behavior (e.g., discharge of pollution, improper use of modern means in agricultural production, etc.) have significant negative externalities and pollution spillover effects. These may lead to nonparticipants in agricultural non-point source pollution control gaining the same economic utility as participants. That is, rational agricultural producers will adopt the strategy of “free-riding”, and thus the dilemma of agricultural non-point source pollution control will inevitably become the tragedy of commons [
18,
19]. So, establishing an endogenous mechanism to encourage local governments, new agricultural operators and traditional farmers to form a multi-agent co-governance model of agricultural non-point source pollution control is the key measure to break through the current dilemma.
In fact, many researchers have explored the endogenous mechanism to break through the dilemma of agricultural non-point source pollution control by adopting the game theory which could describe stakeholders’ interactions and behavior decisions [
20,
21], while seldom considering stakeholders’ bounded rationality and dynamic decision processes of their mutual learning and influence. Thus, this paper is premised on the construction of a trilateral evolutionary game model of multi-agent co-governance in agricultural non-point source pollution control by stakeholders including local governments, new agricultural operators and traditional farmers. This is mainly attributed to the point that evolutionary game theory focuses on behavioral decisions among bounded rationality groups by adopting differential equations or partial differential equations, which could analyze the dynamic processes and stability of their decision-making evolutions. As many decision models are derived from evolutionary game theory, among which the most common is the replication dynamic evolutionary game model, thus the replication dynamic evolutionary game model will be adopted to explore the evolution rules of the three groups in this paper.
According to the review of relevant research on pollution control in agricultural production and rural environment based on game theory, the rest of this paper constructs the research model of the evolutionary game for the multi-agent co-governance of agricultural non-point source pollution control and analyzes the evolutionary equilibriums. Then, in
Section 5, numerical simulations and scenario analysis are implemented, and accordingly, conclusions and suggestions to promote the multi-agent co-governance of agricultural non-point source pollution control under the intensive management pattern are obtained.
Thus, this paper will extend previous research by clarifying the interactive relationships between groups of local governments, new agricultural operators and traditional farmers. In particular, traditional farmers have a dual decision-making mechanism in the game; that is, traditional farmers could firstly make a decision of either to transfer the land operation rights to new agricultural operators or independently operate the land, and then decide whether to cooperate in the co-governance of agricultural non-point source pollution control. To deal with the above, this paper constructed a trilateral evolutionary game model of multi-agent co-governance in agricultural non-point source pollution control by local governments, new agricultural operators and traditional farmers. Based on the model, the cooperative stability evolution processes of these three groups’ behavior were analyzed, and, furthermore, the guiding role of local governments in the multi-agent co-governance model was also presented. Moreover, this paper put forward propositions for decision-making by analyzing the interactive behavior of these groups under different conditions and scenarios, as well as simulating the evolution processes of multi-agent co-governance in agricultural non-point source pollution control. This paper mainly contributes to the following aspects:
(1) We build an evolutionary game model to formulate multi-agent co-governance of agricultural non-point source pollution control by local governments, new agricultural operators and traditional farmers of bounded rationality.
(2) We analyze the evolutionary stable strategies and conditional requirements for how the groups could cooperate in a multi-agent co-governance model.
(3) We conduct a numerical simulation in different scenarios to propose how the multi-agent co-governance model of agricultural non-point source pollution control will eventually evolve into an asymptotically stable state.
2. Literature Review
Our study is closely relevant to the research on pollution control in agricultural production and rural environment based on game theory. Some of this research focused on the agents’ profits and cost allocation about pollution control. For instance, Poorsepahy et al. put forward a new game theoretical methodology to solve the problem of river pollution by adopting river pollution permit allocation in shared agricultural areas [
22]. In addition, Skardi et al. used the Nash bargaining theory to fairly allocate the cost of participating players in a cooperative watershed coalition for non-point source pollution management in watersheds [
20]. Other research has focused on the relationship between the government and farmers in agricultural and rural pollution control. For example, Yang proposed a game model between the government and farmers, and then put forward suggestions on developing and strengthening farmers’ cooperative organizations and integrating rural environment and farmers’ participation in the evaluation of government performance to ensure effective government supervision of rural environment [
23]. More straightforwardly, Hu et al. pointed out that governmental deregulation of agricultural pollution should be the main cause by adopting game theory to analyze the regulation of grassland ecological compensation [
24].
However, most of these pieces of research are based on traditional game theory that assumes players to be completely rational, while, in reality, players operate within an environment of almost bounded rationality. Therefore, researchers began to adopt the evolutionary game theory into the study of rural and agricultural environmental pollution control when considering the bounded rational players [
25,
26]. Zuo et al. constructed an evolutionary game model of large-scale farmers’ green farming under governmental regulation by analyzing their motivations. They found that it was difficult for large-scale farmers to realize the self-evolution of green operation mode under the complete market mechanism, while governmental regulation had a strong effect on the evolution [
27]. Xu et al. analyzed the governance of rural water environments by the trilateral evolutionary game, concluding that as long as the government and enterprises take co-governance to effectively protect the interests of farmers, there would be conducive to improve rural water environments [
28]. By focusing on the problem of environmental pollution of waste products in livestock enterprises, Tu and Zhang found that the main reason was the absence of proactive inspection by the local government with livestock enterprises and downstream farmers [
29]. Cui et al. constructed evolutionary game models between the government and farmers, farmers and agricultural enterprises, to attempt to obtain the best stable strategy for better green technology diffusion. Their results indicated that slashing green production costs and supervision cost of government were crucial for the best stable strategy [
30].
In summary, research on pollution control in agricultural production and rural environments by game theory should take the interactions between stakeholders and their bounded rationality into account. However, previous research has only taken local government, farmers and agricultural enterprises into the consideration of stakeholders, neglecting the relationship of comparison and learning between two types of agricultural producers as stakeholders who are new agricultural operators and traditional farmers under intensive management pattern [
31]. In fact, as two groups of agricultural producers, new agricultural operators and traditional farmers will coexist for a long time in China because of the land geography and the household responsibility system [
32]. Accordingly, their agricultural production behavior and strategies will directly affect the effectiveness of agricultural non-point source pollution control. As such, this paper constructed a trilateral evolutionary game model of multi-agent co-governance in agricultural non-point source pollution control by local governments, new agricultural operators and traditional farmers.
5. Numerical Simulation and Scenario Analysis
According to the replication dynamic equation and constraints of evolutionary stable strategies, numerical simulation experiments are conducted to further verify the above analysis and influence on the evolution with parameters of multi-agent’ strategies about co-governance in agricultural non-point source pollution control. Assuming that the initial time of evolution is 0 and the end time is 300, the initial proportion of local governments adopting strategy
among their groups is 0.4; meanwhile, the proportions of new agricultural operators adopting strategy
and traditional farmers’ strategy among their groups are 0.2 and 0.3, respectively. In addition, the other parameters are set as
, , , , , ,
,
,
,
,
,
,
,
,
,
,
,
and
.
Proposition 1. In the scenario that parameters meet the required conditions of⑥, the multi-agent co-governance model of agricultural non-point source pollution control will eventually evolve into an asymptotically stable state.
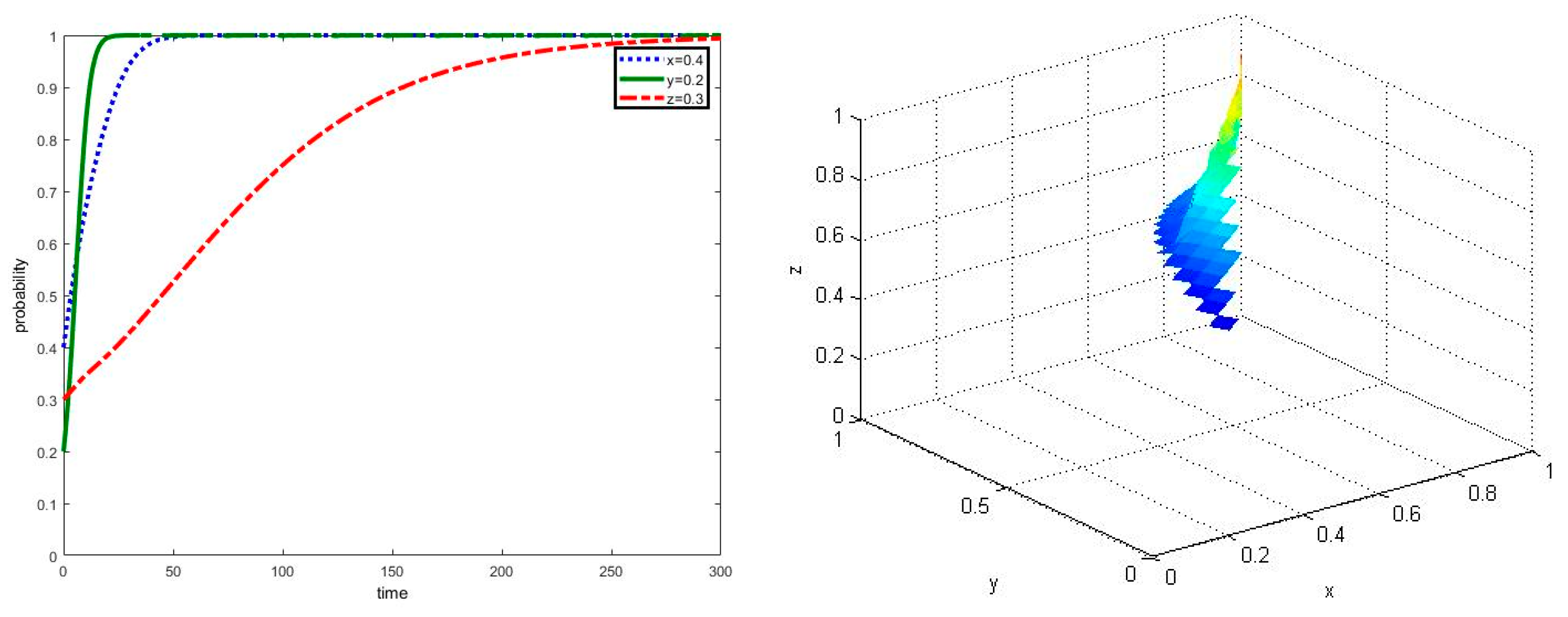
When parameters meet the required conditions of ⑥, the simulation results of the evolution process can be shown in
Figure 2. It can be seen that new agricultural operators would firstly participate in the co-governance of agricultural non-point source pollution control, followed by local governments and traditional farmers. Even if the initial proportion of new agricultural operators adopting strategy
among their groups is only 0.2, which is less than the proportion of local governments’ strategy
and traditional farmers’ strategy
among their groups, new agricultural operators are willing to cooperate in agricultural non-point source pollution control in the shortest time, which is less than t = 20. This may be related to the land operation scale of new agricultural operators, whose green production costs and extra benefits of green agricultural products will be reduced and enlarged by the influence of scale effect. Meanwhile, if new agricultural operators’ non-green production behavior is monitored and denounced by traditional farmers, new agricultural operators will lose land operation rights and be fined from local governments. Therefore, compared with other groups, new agricultural operators have stronger motivation and incentives of co-governance in agricultural non-point source pollution control.
In this scenario, an agricultural non-point source pollution control system composed of local governments, new agricultural operators and traditional farmers will eventually evolve into a collaborative state; that is, an asymptotically stable point E
8(1,1,1) will be achieved. This shows that new agricultural operators play a leading role in the system, as such local governments should make full use of the technology spillover effect and strong motivation of new agricultural operators to guide traditional farmers participating in the multi-agent co-governance model of agricultural non-point source pollution control.
Proposition 2. According to the required conditions of ⑤, the rewards provided to local governments by the superior government will greatly affect local governments’ strategies and traditional farmers’ evolutionary time of being a stable strategy.
In the scenario that parameters meet the required conditions of ⑤, we assume that the rewards provided to local governments by the superior government will be reduced to
, even if local governments performed well on agricultural non-point source pollution control. The simulation results can be shown in
Figure 3. As seen in
Figure 3, when the rewards
provided to local governments by the superior government are less than the cost
of local governments by adopting strategy
, then local governments will gradually reduce their initiatives in guiding the other two groups cooperating in the co-governance of agricultural non-point source pollution control, thus the co-governance model will no longer exist and the system will eventually tend to achieve the asymptotically stable point E
7(0,1,1). However, in this scenario even if local governments deregulate in agricultural non-point source pollution control, new agricultural operators are still willing to cooperate in agricultural non-point source pollution control in a short time, which is near t = 20, while some traditional farmers will a take long time to cooperate in agricultural non-point source pollution control where
is near t = 200.
Proposition 3. According to the conditions of ③, increasing cost of green production will significantly affect the strategies of new agricultural operators and traditional farmers. The higher green production cost is, the more preference for non-green production modes they will have.
In the scenario that parameters meet the required conditions of ③, the green production cost of new agricultural operators and traditional farmers are increased to
and
when compared with the above analysis. The simulation results can be shown in
Figure 4. From the simulation results, it can be obtained that when the green production cost is higher than local governments’ subsidies, even if local governments adopt strategy
, new agricultural operators and traditional farmers are not willing to cooperate with local governments in the co-governance of agricultural non-point source pollution control. Then, the multi-agent co-governance model will collapse, and the system will eventually tend to achieve the asymptotically stable point E
4(1,0, 0). As such, it is necessary for local governments to take measurements for providing reasonable subsidies, as well as offering technical support to reduce the green production cost of new agricultural operators and traditional farmers.
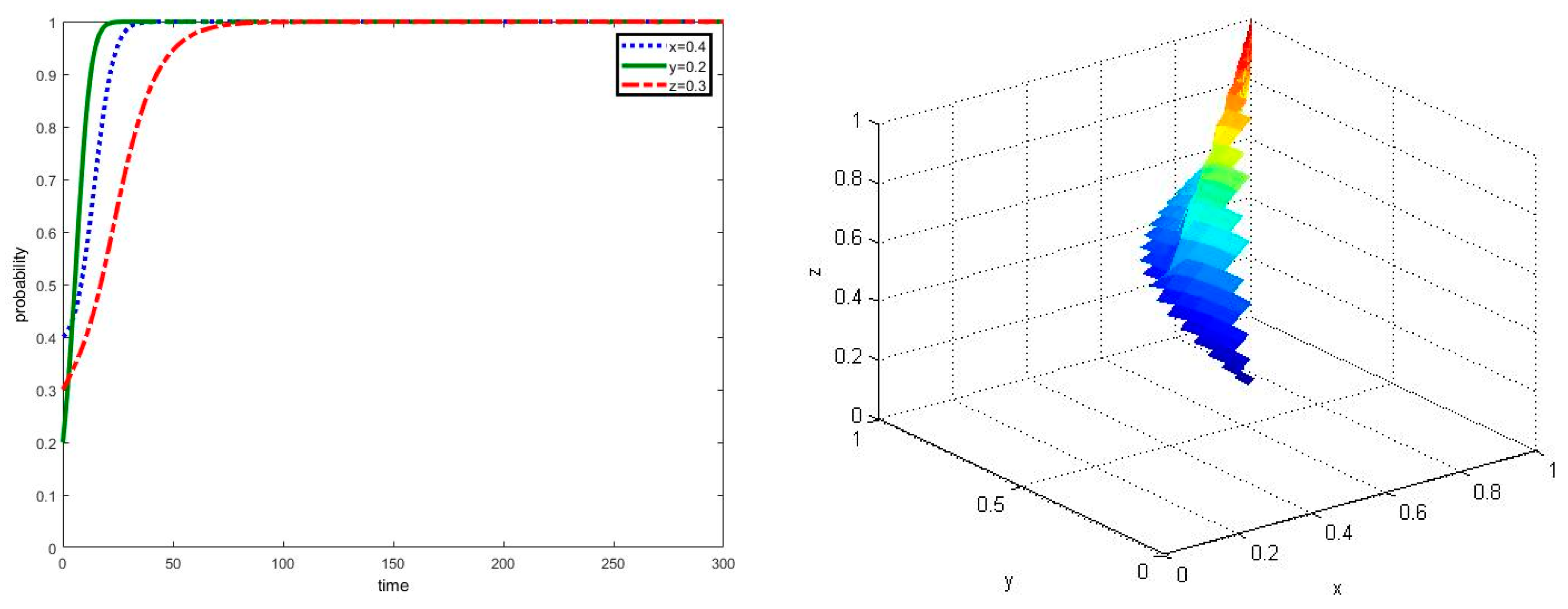
Proposition 4. The proportion of land operation between new agricultural operators and traditional farmers has no significant effect on the evolution result of multi-agent co-governance in agricultural non-point source pollution control, while it has a significant influence on the evolutionary time of being a stable strategy for traditional farmers.
Compared to the analysis of above, the proportion of land operation by new agricultural operators has been changed, where it is set to be
and
. In addition, the simulation results can be shown in
Figure 5 and
Figure 6, respectively. By the comparison of
Figure 2,
Figure 5 and
Figure 6, it can be seen that under the certain required conditions of ⑥, the system will eventually evolve into an asymptotically stable state point E
8 (1,1,1). While the proportion of land operation by new agricultural operators
becomes larger, traditional farmers will take more time to cooperate in the co-governance of agricultural non-point source pollution control where
is near t = 300. It can be concluded that the proportion of land operation between new agricultural operators and traditional farmers has significant influence on the evolution time of being a stable strategy for traditional farmers, but it will not significantly affect the final evolution results of the system.
Proposition 5. According to the required conditions of ⑦ or ⑧, there are green synergy effects among local governments, new agricultural operators and traditional farmers.
In the scenario that parameters meet the required conditions of ⑦ or ⑧, some of the local governments, new agricultural operators and traditional farmers in their groups would cooperate in the co-governance of agricultural non-point source pollution control. Assume that , , , , , , , , , , , , , and let the initial proportion of local governments adopting strategy , new agricultural operators adopting strategy and traditional farmers’ strategy among their groups be 0.8, 0.5 and 0.1, respectively. Then, the influence of different parameters on the dynamic evolution results of these three groups’ strategies are simulated by the tools of MATLAB. Due to the limited space, the simulation results are no longer illustrated as figures in this paper.
According to the simulation results, it can be concluded that when the rewards
provided to local governments by the superior government are increased, then the initiative of local governments to take proactive actions in agricultural non-point source pollution control can be improved. Meanwhile, more and more new agricultural operators and traditional farmers would be encouraged to cooperate with local governments and actively participate in the co-governance of agricultural non-point source pollution (that is,
,
and
). If the penalties
for agricultural non-green production imposed by local governments on new agricultural operators are increased, new agricultural operators would be more proactive in the co-governance of agricultural non-point source pollution control, where
, which is also supported by Hafezalkotob [
36]. Additionally, the same conclusion can be derived when the loss
caused by the termination of land operation rights contract from traditional farmers to new agricultural operators, or the possible negative benefits
of agricultural non-point source pollution to new agricultural operators, or additional incomes
from selling green production or incentives
from local governments are raised. In particular, these parameters’ variations will also bring a certain spillover effect to the strategy
,
among local governments and traditional farmers. Similarly, if the possible negative benefits
of agricultural non-point source pollution on traditional farmers, or incentives
for environmental protection from local governments, or the additional benefits
of green production are increased, the initiative of traditional farmers cooperating in the co-governance of agricultural non-point source pollution control would be improved, where
. Besides, local governments and new agricultural operators will be actively encouraged to cooperate in the co-governance of agricultural non-point source pollution control. This conclusion is in accordance with the view proposed by Xu et al. [
28] that the equilibrium point stability of one group is also affected by the other two groups’ strategy evolutions. In addition, the rewards not only provided from superior government to the local governments, but also new agricultural operators and traditional farmers obtained from local governments could be an incentive for them to cooperate in the co-governance of agricultural non-point source pollution control, which is also supported by previous research (Zuo et al. [
27]; Zhang et al. [
37]).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}