1. Introduction
As the most prevalent traffic engineering facility, traffic signs provide visual information and route assistance to drivers by using information such as words, symbols, and graphics. For efficient and safe traffic flow, traffic signs are essential. However, the arbitrary placement of traffic signs has become more prevalent as a result of the accelerated development of road building and the growing congestion of the road network. The unreasonable traffic signs information volume (TSIV), which includes both insufficient information and information overload, is the most noticeable issue among them. The driver may experience slower cognitive reaction times, decreased cognitive efficiency, and greater visual workload due to information overload [
1,
2]. Insufficient information can lead to greater reliance on the driver’s judgment and even poor coping mechanisms ranging from distraction to aggression. Both insufficient and overloaded information have a negative impact on driving safety [
3]. Therefore, a reasonable and appropriate TSIV is conducive to drivers to complete their driving tasks and ensure safe driving.
Many factors, including the sign’s size, words, color, reflectivity, and angle of inclination, must be considered when designing and installing traffic signs, but the most crucial one is whether the driver will accept and use the information [
1]. The ability of humans to receive information in a short time is limited [
4]. When the TSIV is excessive, the driver’s short-term memory will rapidly get overloaded, making it difficult to complete driving tasks and threatening traffic safety. Additionally, drivers primarily rely on their vision to collect information when driving [
5]. As a result, the drivers’ visual characteristics will be impacted by the overload or insufficiency of TSIV [
6].
On the TSIV, academics have conducted a great deal of studies and produced a great deal of findings. Lyu et al. [
7] found that the drivers’ reaction time increased with the increase of the TSIV and proposed that the information contained in individual sign should be kept at an appropriate level so that drivers have enough time to identify the signs and thus ensure driving safety. To ensure driving safety, Guo et al. [
8] proposed that the information volume on expressway traffic signs should be limited to 194 bits and no more than seven pieces of information based on the analysis of various indicators. Xu et al. The authors of [
9] made a comprehensive evaluation of the graphical variable message sign from five aspects: legibility speed, legibility distance, legibility time, comprehension accuracy, and subjective scoring, and suggested that the upper limit of the information displayed on the graphical variable message sign was five road names. Liu et al. [
10] found that simpler contents and larger contrast between the background colors and foreground colors of traffic signs would make the human brain respond faster. Lyu et al. [
11] found that driving workload was closely related to TSIV and that speed maintenance and lane deviation was significantly different at different cognitive workload levels. Liu [
1] found that the TSIV had a significant impact on the visual search performance of drivers, and the more TSIV, the less the efficiency of the visual search was. Liu et al. [
12] investigated the effect of the TSIV on driver’s recognition time and showed that the TSIV explains 61% of driver’s recognition time. The more information is conveyed by road traffic signs, the longer the recognition time. The threshold value of TSIV is 642 bits, and exceeding this value will result in information overload.
In studies of traffic signs and drivers’ visual recognition, cognition, and driving behavior, it is well established that traffic sign information affects the drivers’ visual characteristics, cognitive abilities, and driving performance. Liu et al. [
13] analyzed the information transmission system of the traffic signs combination from the perspective of cognitive psychology, constructed its information transmission model, and explored the relationship between the driver identification time in the process of different traffic sign combinations. Schnell et al. [
14] found that larger and brighter signs are more effective in delivering information to drivers, either by reducing information acquisition time or by improving transmission accuracy. In return, reducing sign viewing duration and improving reading accuracy may improve road safety. According to Borteorte et al. [
15], road users do perceive and process information differently. These differences are influenced by factors like gender, age, and experience, and the TSIV has an impact on how safe they perceive the road to be. The drivers significantly reduced their speed to read four-line monolingual and four-line bilingual signs, which was accompanied by an increase in headway to the vehicle in front, according to research by Jamson et al. [
16] on the impact of bilingual traffic guide signs on driver attention at various length and complexity levels. Through the simulated driving test, Huang et al. [
17,
18,
19,
20] examined how the complexity of diagrammatic guide signs affected the drivers’ eye movements and driving behavior, emphasized the need for evaluating and optimizing complex diagrammatic guide signs, and suggested the ideal design scheme for advanced guide signs on the urban expressway. The impact of the layout form and information volume of the intersection guidance signs on the driver’s driving behavior was examined by Wei et al. [
21] and Yao et al. [
22]. The guide signs’ quantitative evaluation results reveal that visual safety reduces as information volume on the signs rises. Topolšek et al. [
23] compared and analyzed the visual performance differences of billboards and traffic signs between drivers of various ages and discovered that the number of roadside objects detected was not correlated with the driver’s age and that those drivers who noticed more traffic signs also paid more attention to visual advertising. Younger drivers considerably outperformed older drivers in terms of accuracy and response time, according to Ben-Bassat et al. [
24]. The older drivers had an average reaction time that was roughly twice as fast as the younger drivers. However, neither group’s comprehension of traffic signs was impacted by the presentation style (with or without context).
The aforementioned literature concentrated more on the evaluation of a specific road section or one traffic sign and mainly examined the effects of variables such as the information volume, layout form, and setting form of traffic signs on the driver’s visual characteristics, cognitive ability, and driving behavior. The reasonableness of the density of TSIV in road networks, which is one of the beginning grounds for this research endeavor, has not, however, received much attention. The objective of this study is to identify the ideal TSIV range for safe driving by analyzing how the density of road TSIV affects the drivers’ visual characteristics and visual workload.
It is anticipated to aid in assessing the TSIV’s rationalism and offer a theoretical framework for the logical placement of traffic signs. Additionally, several questions were addressed:
- (1)
Which visual indicators of drivers are most significantly and sensitively affected by the TSIV?
- (2)
How does the different TSIV affect the visual characteristics and visual workload of drivers?
- (3)
What is the appropriate range of TSIV that will ensure the safety and comfort of driving?
2. Quantification of TSIV
The transmission and feedback of traffic information is achieved in large part by the use of traffic signs. The primary purposes of traffic signs are to notify drivers of the current traffic situation in a clear, timely, and appropriate manner; to direct and organize the flow of traffic; and to promote the safe, orderly, and efficient operation of vehicles. As a result, the safety of road operations directly depends on the logic of traffic sign information. Among these, the information volume of the traffic signs can have a major impact on the drivers’ cognitive function and workload while driving, meaning that different traffic signs will have varied information workloads for the drivers. As a result, we must first quantify the information contained in traffic signs.
Shannon first proposed the concept of information theory in 1948 and defined “information entropy” [
8]. Information theory explains that the volume of information contained in a certain given background and condition is closely related to the probability of each element in the information [
25]. The TSIV calculation formula is as follows, in accordance with Shannon Information Theory:
where
H(
X) indicates the information volume of the traffic signs (bits),
m is the total number of possible states for the event
X,
Xi represents the
i state of the event,
P(
Xi) represents the probability of the
i state.
Assuming that the event in each state occurs with the same probability, that is,
P(
Xi) = 1/
m, the calculation method of information volume is reduced to:
According to the Chinese national standard “Road Traffic Signs and Markings” (GB5768-2022) [
26], the information elements of traffic signs mainly include seven types: Chinese characters (3500 commonly used Chinese characters), English characters (26 English letters from A to Z), Arabic numerals (10 Arabic numerals from 0 to 9), geometric figures (six geometric shapes including circles, triangles, etc.), colors (11 colors including red, white, blue, etc.), pointing symbols (including 30 different direction pointing arrows or symbols), and graphic symbols (including 50 different types of graphic symbols). The information volume of different information elements can be calculated by the Formula (2).
The weight of the traffic sign information elements must be established because when drivers notice traffic signs while driving, their perception and attention to various types of traffic sign information and elements varies. The weight of seven different types of elements was ultimately determined using the Analytic Hierarchy Process (AHP), which was used to assess the significance of the traffic sign information elements [
27]. This process involved 30 experienced drivers and 30 traffic engineers comparing the traffic sign information elements pair by pair. The consistency index (CI = 0.0238) and consistency ratio (CR = 0.0267 < 0.1) show that the results of the hierarchical analysis have satisfactory consistency and the weight values of each element are valid. Therefore, the information volume and weight of each traffic sign information element were obtained, and the results are shown in
Table 1.
After comprehensively considering the information volume and weight of each element, the information volume of traffic signs can be calculated by the Formula (3):
where:
εi is the weight of
i element,
Hi is the basic information volume of the
i element,
ni is the number of
i element in traffic signs.
The information volume of traffic signs is quantified in this study using the aforementioned computation approach to produce different levels of TSIV, which are then utilized to examine the visual characteristics and driving workload of drivers at various TSIV levels.
3. Experimental Design
3.1. Participants
For this study, 30 participants—21 males and 9 females—were recruited based on the gender ratio of Chinese drivers (7:3 for men to women) [
28]. Additionally, the number of participants was chosen using examples from previous similar studies [
1,
9,
12] that followed customary procedures. Each participant has at least three years of driving experience and a Chinese statutory class “C” driver’s license. With a standard deviation of 7.6 years, the participants’ average age was 32, and their average amount of driving experience was 9 years, with a 5.4-year standard deviation. No one was color blind, and everyone had normal vision. Before the test started, each participant signed an “Informed Consent to the Test,” and they each received RMB 200 thereafter.
3.2. Apparatus
The motion-based driving simulator used in this study has six degrees of freedom (DOF), as illustrated in
Figure 1 (produced by OKTAL-SE, France). As a test vehicle, a real BYD F3 model automobile was employed. The driving simulator has a vision system with three projectors that projects the road model onto a spherical drape in front of the car, giving the driver a 300-degree horizontal field of view. The drivers can access actual roads, traffic signs and markings, and a variety of road environments through the driver simulator. The motion system, feedback system, and cockpit performance of the simulator have all improved to an advanced degree on a global scale.
The SMI iView XTM HED helmet eye movement tracking device, developed and manufactured by SMI (Senso Motoric Instruments) of Germany, was the eye tracker utilized in this examination. The driver’s whole of eye movement data while looking for and viewing various traffic environment details can be collected by the eye tracker. The eye tracker weighs 450 g, has a sampling frequency of 50 Hz or 200 Hz, a fixation position accuracy of 0.5° to 1.0°, and a tracking range of −30° to +30° and −25° to +25° in both the horizontal and vertical directions. In this study, the participants’ fixation, saccade, and blinking during the test were tracked using an eye tracker, and the data were recorded and saved on a laptop computer.
3.3. Driving Scenarios
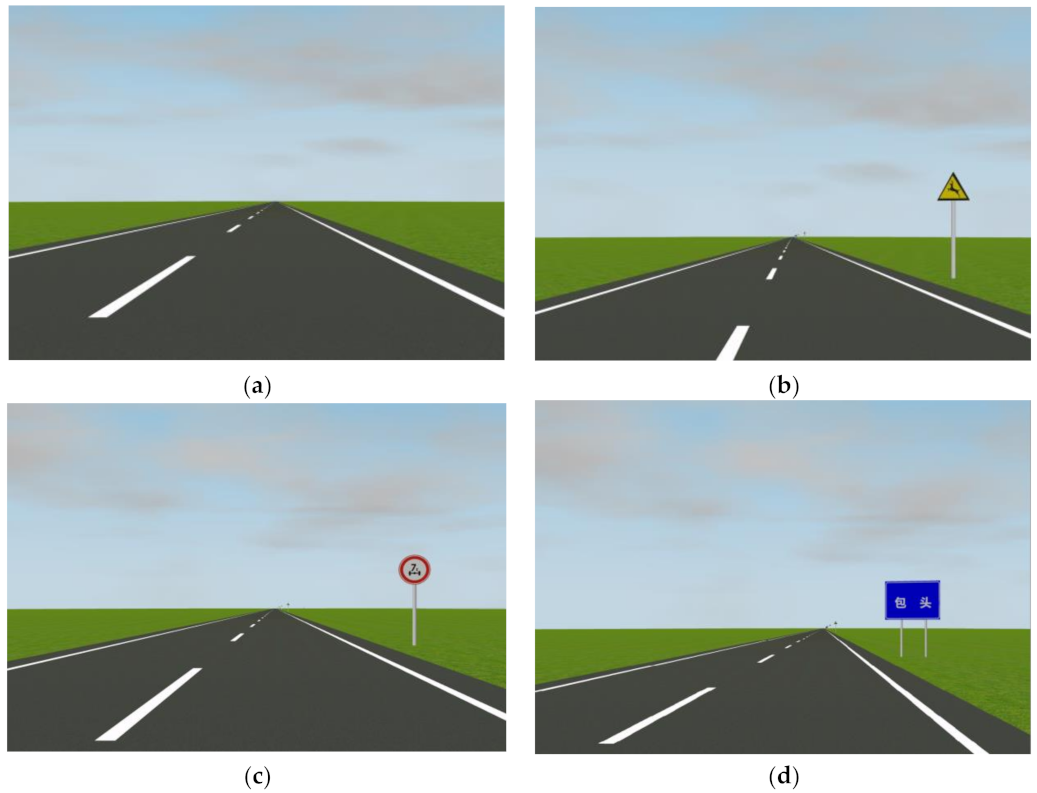
First of all, the traffic signs designed in the test scenarios must comply with the current relevant standards in China, and the setting of the traffic signs must also meet the actual conditions and requirements of the road. More importantly, in order to fulfill the purpose of the experiment, the traffic signs set up in different sections should reflect the differences in the information volume.
The traffic signs set up in the test scenarios met the requirements of the relevant standards according to the actual conditions of the road. The traffic signs in the test scenarios were considered in terms of their type and structural form, in addition to the differences in information volume.
These traffic signs contained regulatory signs, warning signs, and guide signs. At the same time, the structural forms of the traffic signs included single vertical, double vertical, and cantilever structures. The diversity of forms of traffic signs was fully guaranteed.
In order to determine the features of the kind, density, and distribution of the information volume on traffic signs along these highways, we performed field surveys on a number of China’s monotonous and non-monotonous highways. The distribution of TSIV varied significantly, as we discovered, and the findings were consistent with those of Lyu et al. [
7]. The findings of the final investigation revealed that the TSIV increment was roughly 10 bits/km. Based on this, we assigned S0, S1, S2, S3, S4 and S5 as the five levels of the density distribution of TSIV in the test situations, and
Table 2 displays the classification findings.
The following examples serve as illustrations of the simulated driving scenario created for this study:
- (1)
The secondary road in the driving simulation has one lane in each direction, a lane width of 3.75 m, and a designed speed of 80 km/h. The road’s design specifications all adhere to current Chinese regulations.
- (2)
The roads in the study’s simulated driving scenarios are all straight roads to prevent the impact of alignment changes on the experimental results.
- (3)
To prevent affecting the trial results, no traffic flow and a distinct scenery are set in the simulated driving environment.
The setting of part of traffic signs in the test scenarios is shown in
Figure 2. It should be noted that the pictures displayed in
Figure 2 only select representative types of traffic signs and do not represent the corresponding TSIV levels in the experiment because it is challenging to show all traffic signs of each level in one picture.
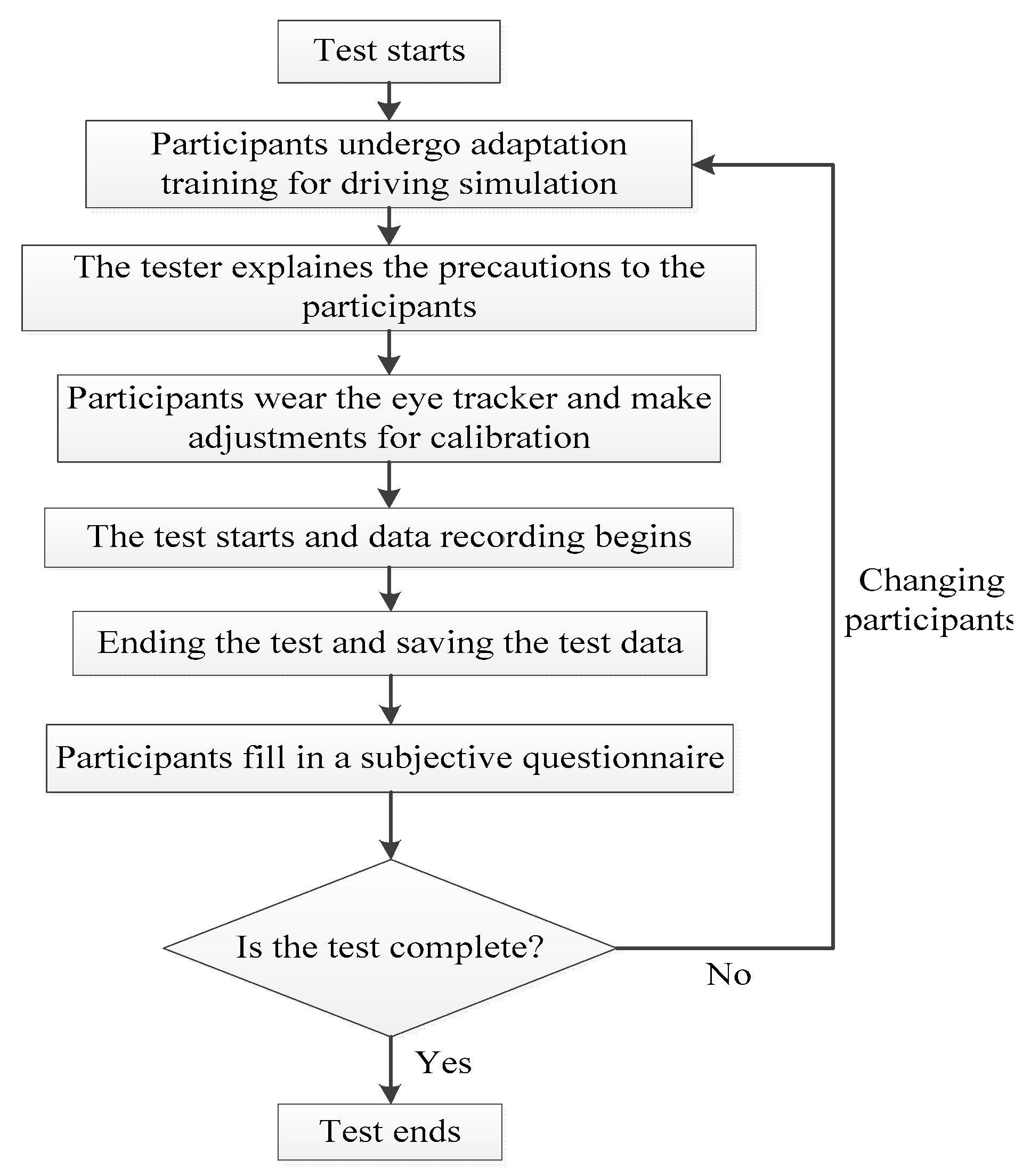
3.4. Experimental Procedure
The experimental design in the paper involved participants driving a simulated vehicle in a driving simulator, where participants were required to operate and maneuver the car at three speeds to complete the driving task. Then, we evaluated the visual characteristics of the drivers when recognizing different levels of TSIV under different speed conditions.
The road length in the simulated driving scenarios is about 20 km, and the duration for drivers to complete the tests at three different speeds was different, but the drivers will not experience driving fatigue during the tests to avoid affecting the test results.
The experimental process is as follows:
- (1)
An “Informed Consent Form” and a “Personal Information Registration Form,” which recorded the participant’s basic information, were distributed to each participant to read, sign, and submit.
- (2)
Started the system of simulating driving, ensured that each component was functioning properly, and fixed the simulated scenarios.
- (3)
Participants initially performed a 5- to 10-min adaptive driving simulation fitness test to determine whether participants were maladaptive. In such case, the participant was changed. If not, the formal test continued.
- (4)
The tester gave the participants an explanation of the simulation driving test’s procedure and safety considerations.
- (5)
Following proper preparation, the participants wore the eye tracker, made necessary adjustments and corrections, verified that the eye tracker was connected to the computer, and calibrated the eye tracker.
- (6)
The participant started the car, started the test, and drove at the specified speed while collecting data on eye movements.
- (7)
The participants went through three simulated driving tests in order, moving at speeds of 60 km/h, 80 km/h, and 100 km/h. The subject needed to maintain outstanding mental and physical health for 30 min following the conclusion of each experiment by resting or moving around.
- (8)
Following the completion of the test, the participant’s eye tracker was removed from the driving simulator and the data on their eye movements was preserved.
- (9)
Participants completed a subjective survey questionnaire.
- (10)
Replaced the participants and repeated the above steps.
- (11)
All the tests were completed.
Figure 3 depicts how the paper’s simulated driving tests were conducted.
4. Selection of Eye Movement Indicators Based on PCA
The error of the eye movement data obtained in this trial is highly random [
12], and therefore, the outliers in the eye movement data need to be removed to ensure the accuracy and rationality of the data analysis. In this paper, all anomalous data are removed using the method of PauTa Criterion [
29,
30], of which the basic formula is:
where:
xi is each sample data;
indicates the average value of all the sample data;
σ denotes the standard deviation of all sample data. Sample data outside this range were removed.
There will ineluctably be certain correlations among the numerous eye movement indicators of drivers, which will in turn cause the information indicated by these indicators to accumulate and overlap. Due to this, the established index evaluation system must eliminate the redundant and repeated information indicators in order to achieve the goal of reducing the dimension of the data, which is to reduce the number of linearly related indicators to a manageable number of irrelevant index systems.
The basic idea of principal component analysis (PCA) is to try to replace a large number of correlated indicators with a new set of uncorrelated composite indicators [
31,
32,
33].
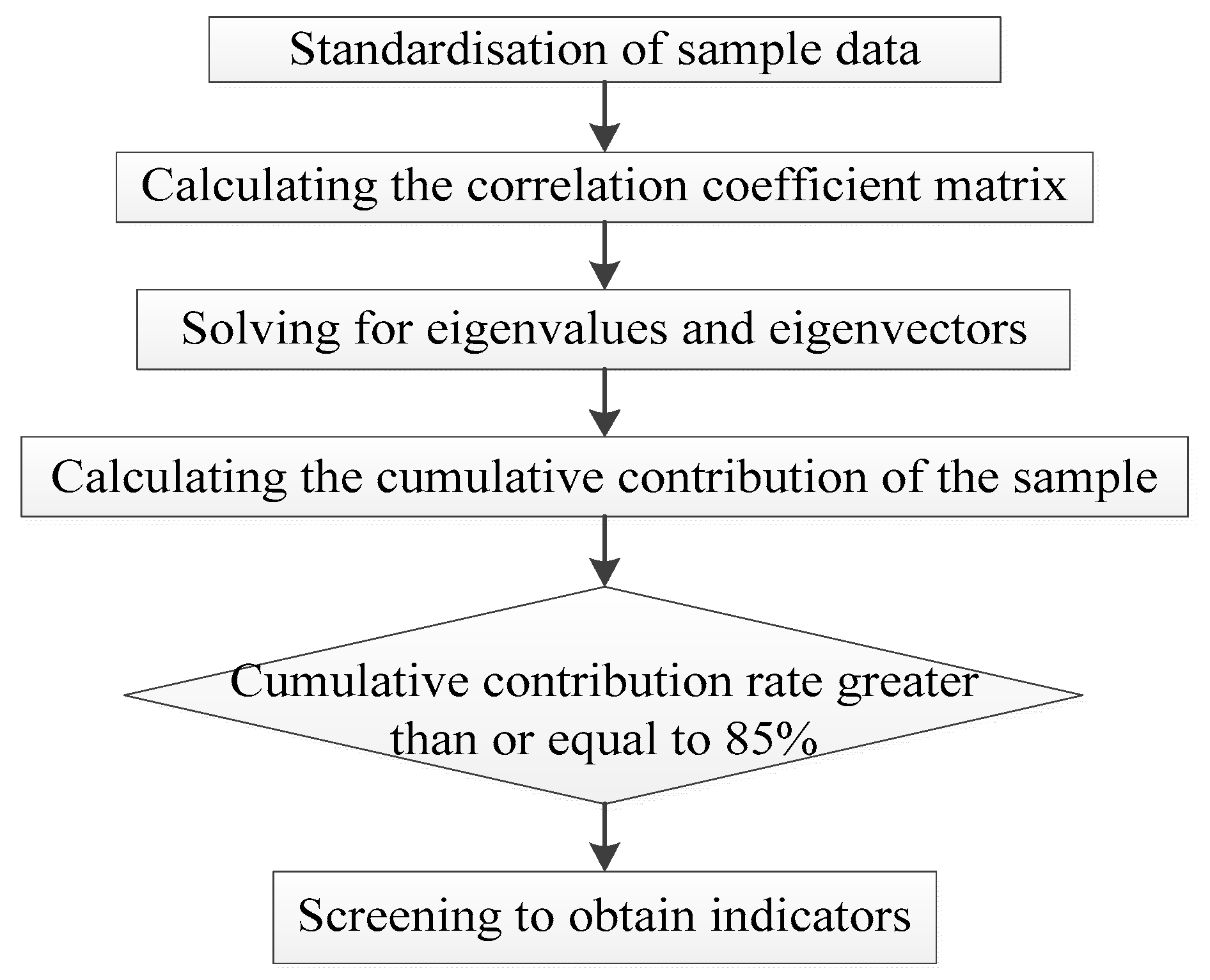
The following is a brief description of the calculation steps for PCA:
Suppose that there are n samples, each with
p variables, and they form a matrix of order n × p.
- (1)
Calculation of the correlation coefficient matrix:
The correlation coefficient is calculated as follows:
- (2)
Solving for the eigenvalues and the eigenvectors.
Solving the eigenequations , the eigenvalues are obtained, and it arranges the feature values in descending order ; then, the eigenvector corresponding to the eigenvalues is solved: ei(i = 1, 2,…, p), and makes .
- (3)
Calculation of principal component contribution rates and cumulative contribution rates.
The contribution rate of the sample principal component Fi is: , the cumulative contribution of the principal component sample F1,…, Fk is .
Finally, the eigenvectors corresponding to eigenvalues with a cumulative contribution rate of 85% or more and an eigenroot greater than 1 are generally selected to form the principal components.
The process of selecting indicators using PCA is shown in
Figure 4.
The default Kaiser–Meyer–Olkin (KMO) test and the Barlett Test of Sphericity are chosen here to test the correlation between the original indicators before the PCA. The value of the KMO statistic ranged from 0 to 1, and the larger the value, the better the result of PCA. It is generally considered that the value of the KMO statistic less than 0.5 is not suitable for PCA. The Barlett Test of Sphericity is used to test whether the correlation coefficient matrix of the variables is a unit matrix. The test statistic obeys χ2, and if the test rejects the original hypothesis, i.e., p < 0.05, it is suitable for PCA.
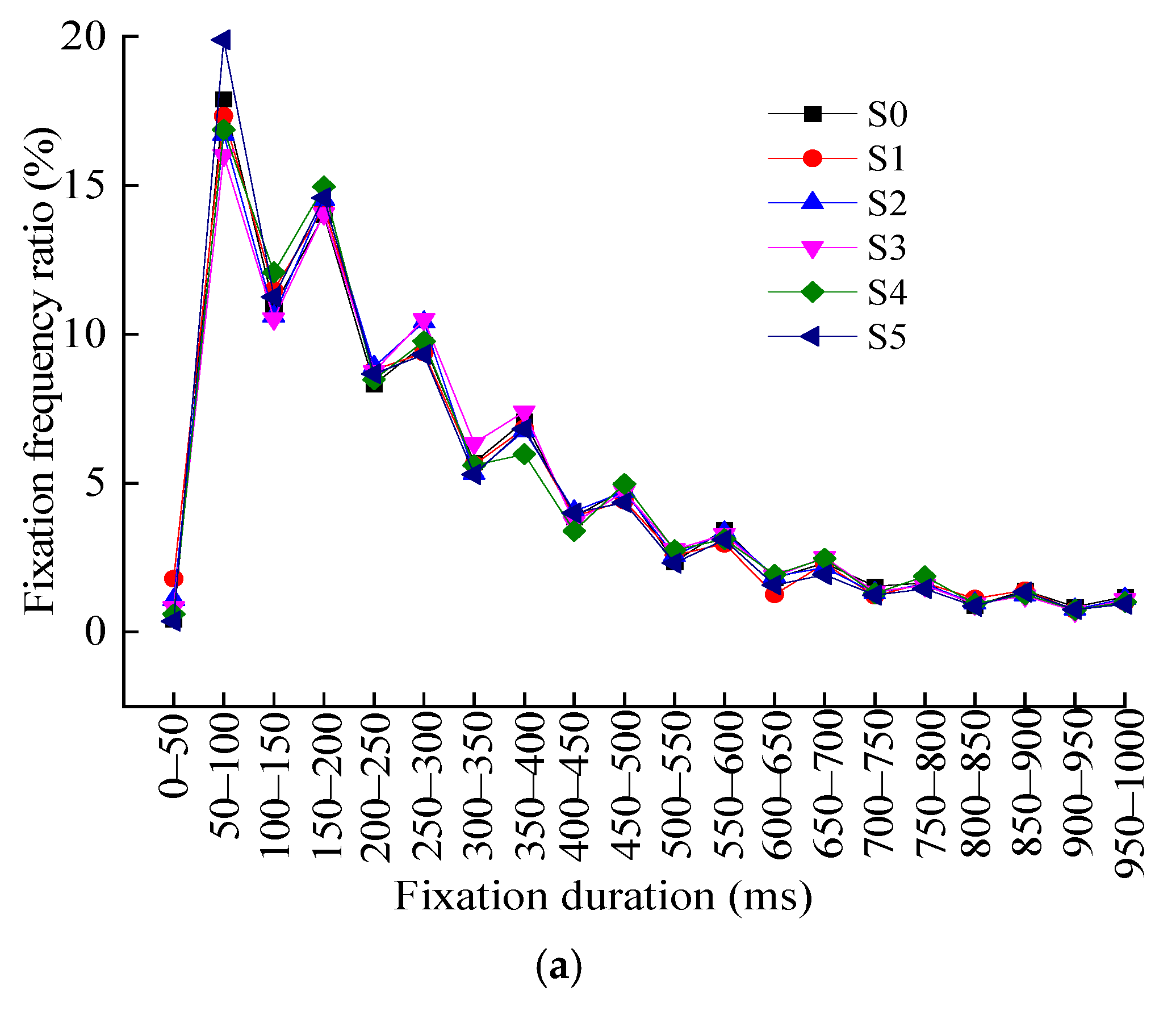
Three frequently used indicators of driver’s visual behavior were chosen: fixation, saccade, and blink: blink duration (BD), fixation duration (FD), pupil diameter (PD), saccade duration (SD), saccade amplitude (SA), saccade peak velocity (SPV), and saccade average velocity (SAV). These indicators were chosen based on the requirements for PCA as well as the methods and findings of research on drivers’ visual behavior in the field of traffic safety. Additionally, standardizing these data, the correlation coefficient and
p-value of the matrix was solved for the standardized data, and the KMO test and Barlett Test of Sphericity were done, the results of which are shown in
Table 3 and
Table 4.
Table 4 shows that the KMO statistic for the eye movement indicators is 0.548 > 0.5, and the result of the Barlett Test of Sphericity is
p = 0.000 < 0.05, so the driver’s eye movement indicators are suitable for the PCA. The results of the PCA are shown in
Table 5.
The eigenroots, the contribution rates, and the cumulative contribution rates of each principal component are ranked from largest to smallest in
Table 5. The first principal component has an eigenvalue of 3.558 and a contribution rate of 50.825%, which explains 50.825% of the total variation, while the second principal component has an eigenroot of 1.459, explaining 20.846% of the total variation. The eigenroots of the first two principal components are greater than 1, and the cumulative variance contribution rate has reached 70.214%. Since the eigenroot of the third principal component is 0.991, which is close to 1, and the variance contribution rate is 14.154%, which is close to the second principal component, the cumulative contribution rate of the variance reached is 85.825%, that is, the three principal components are able to explain 85.825% of the total variance, indicating that the first three principal components essentially contained all the information available for the eye movement indicators. The principal component matrix for the eye movement indicators is shown in
Table 6.
Thus, these three principal components can be expressed as:
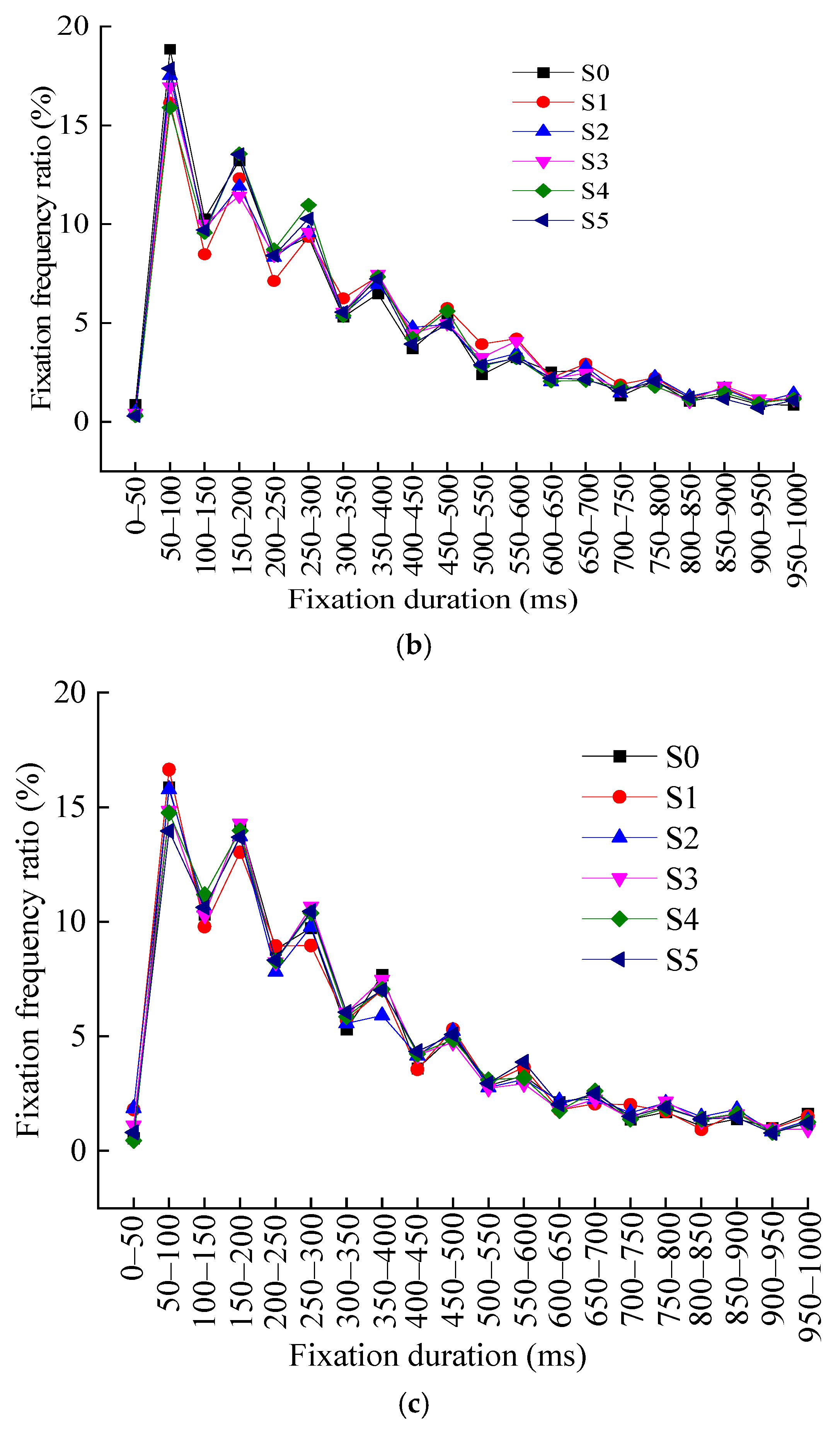
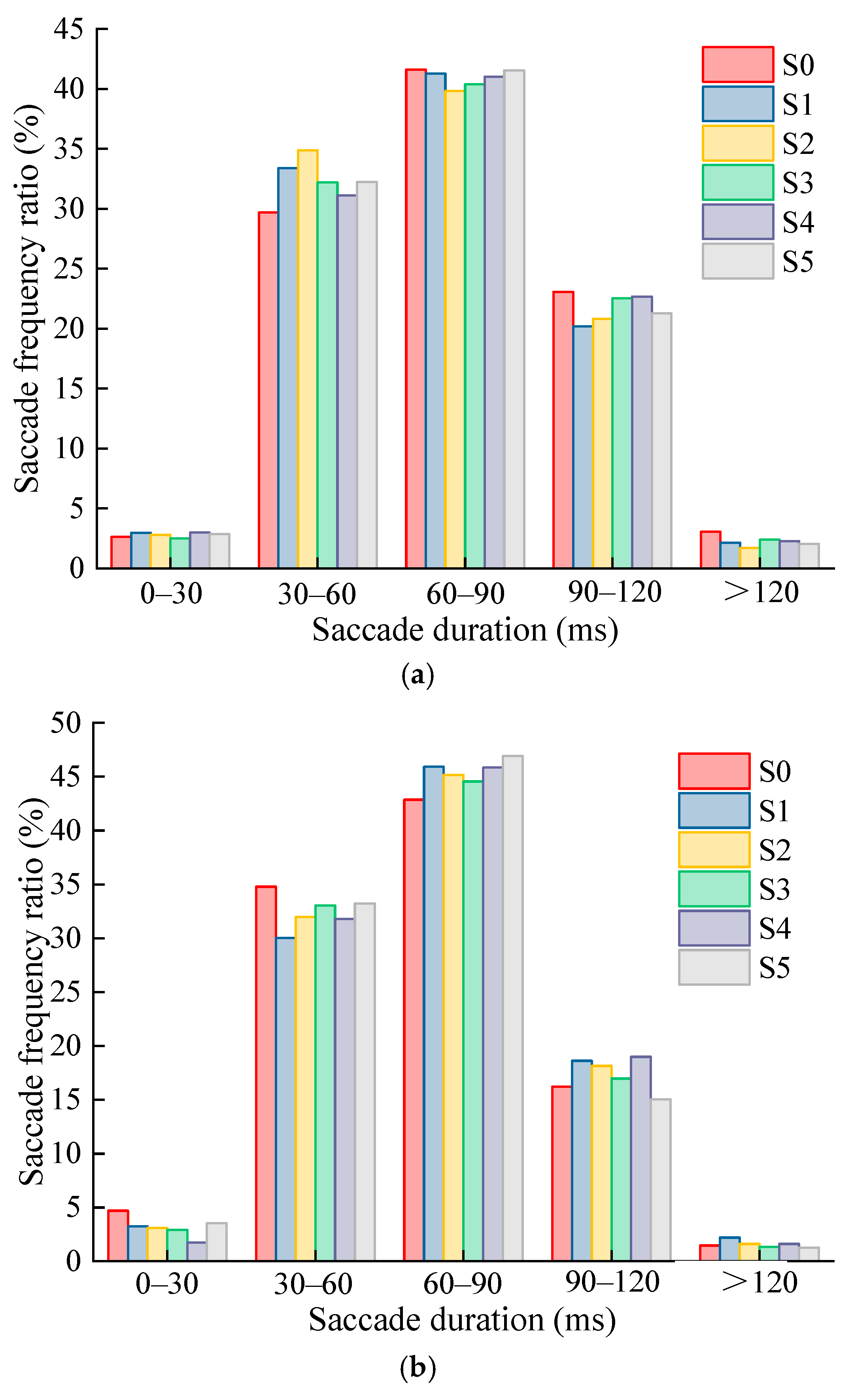
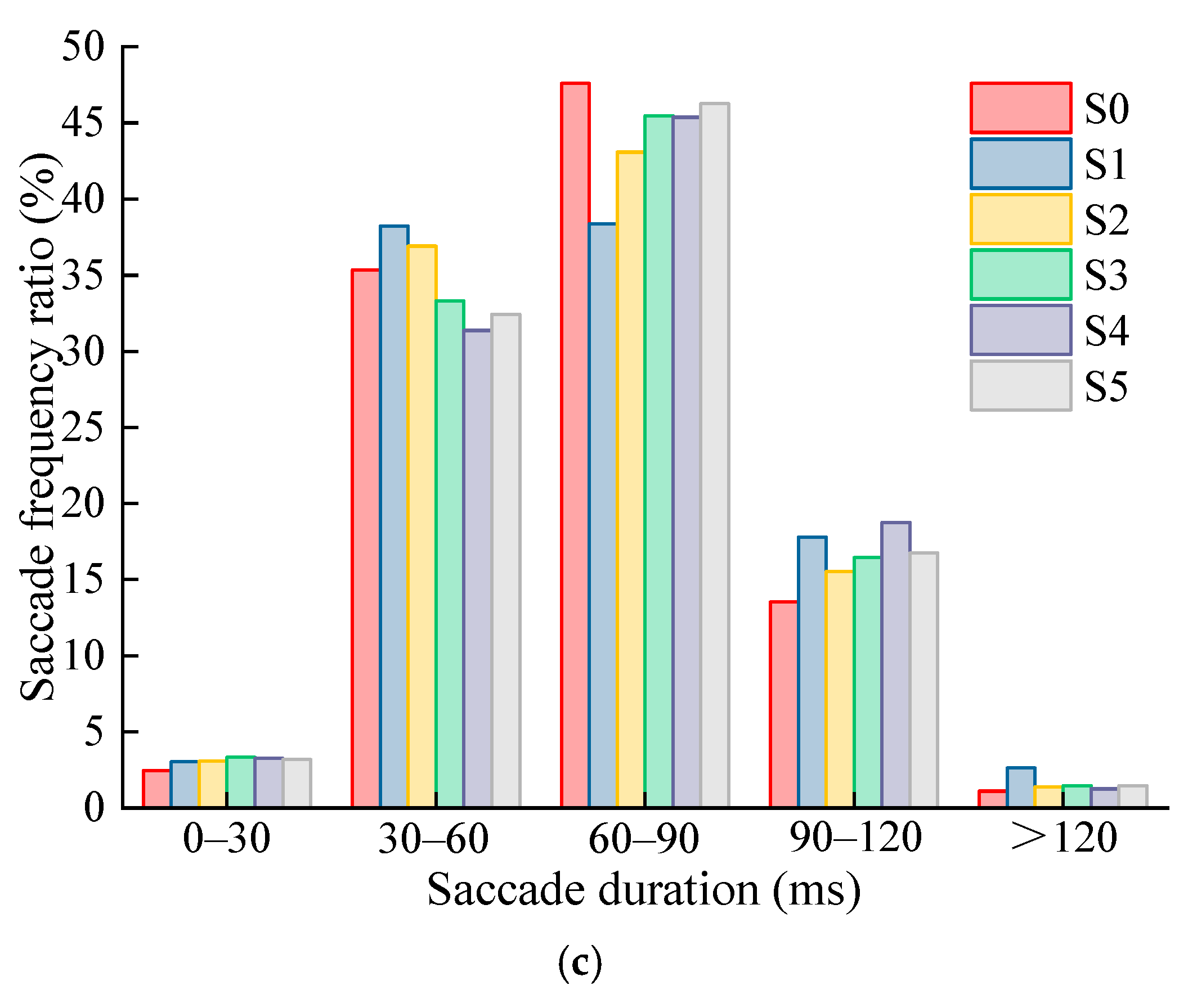
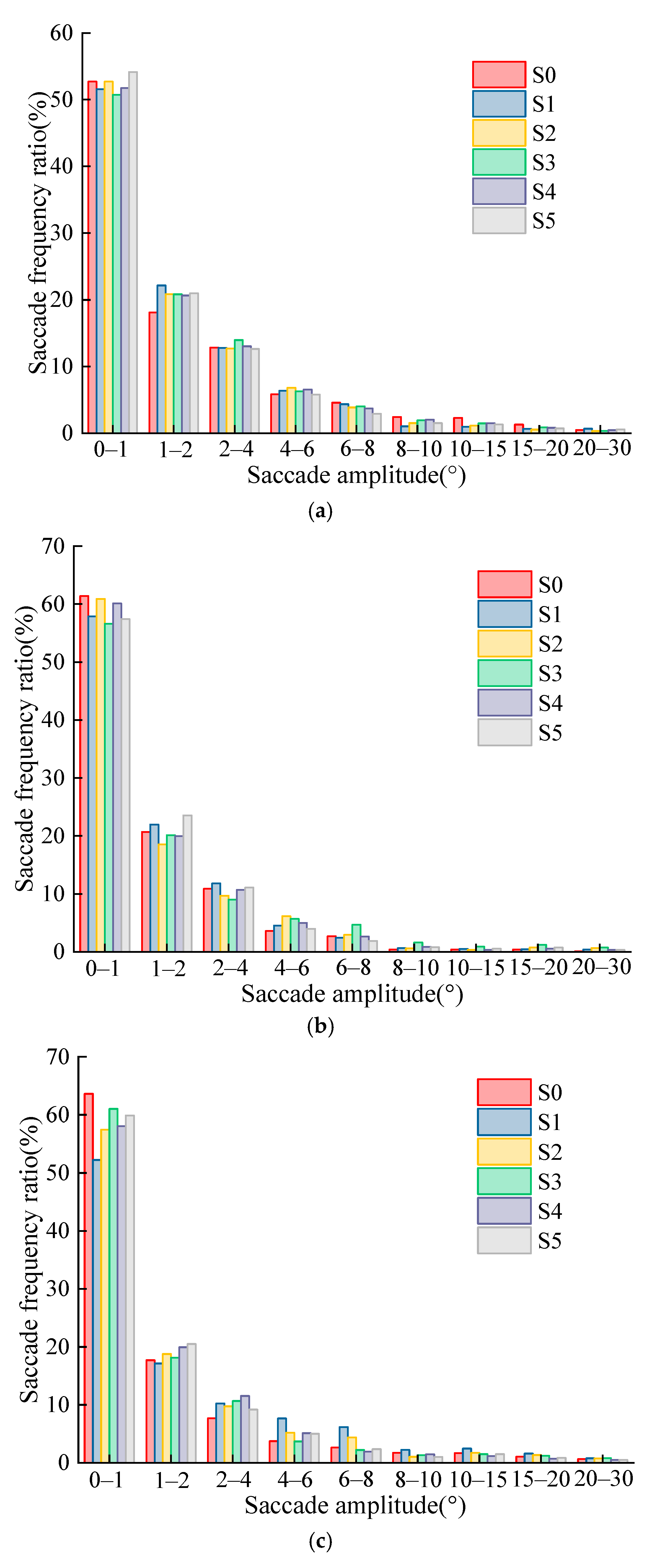
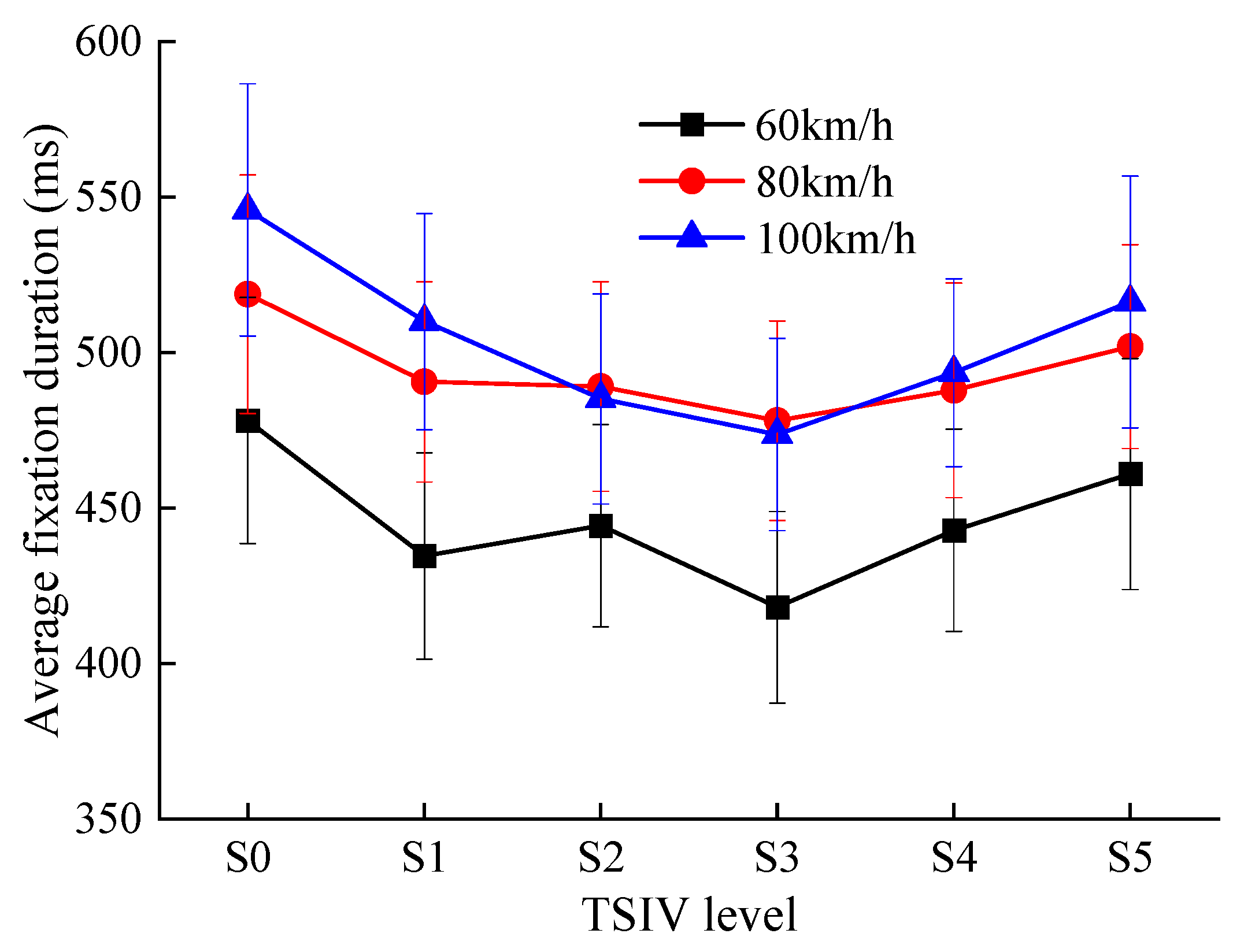
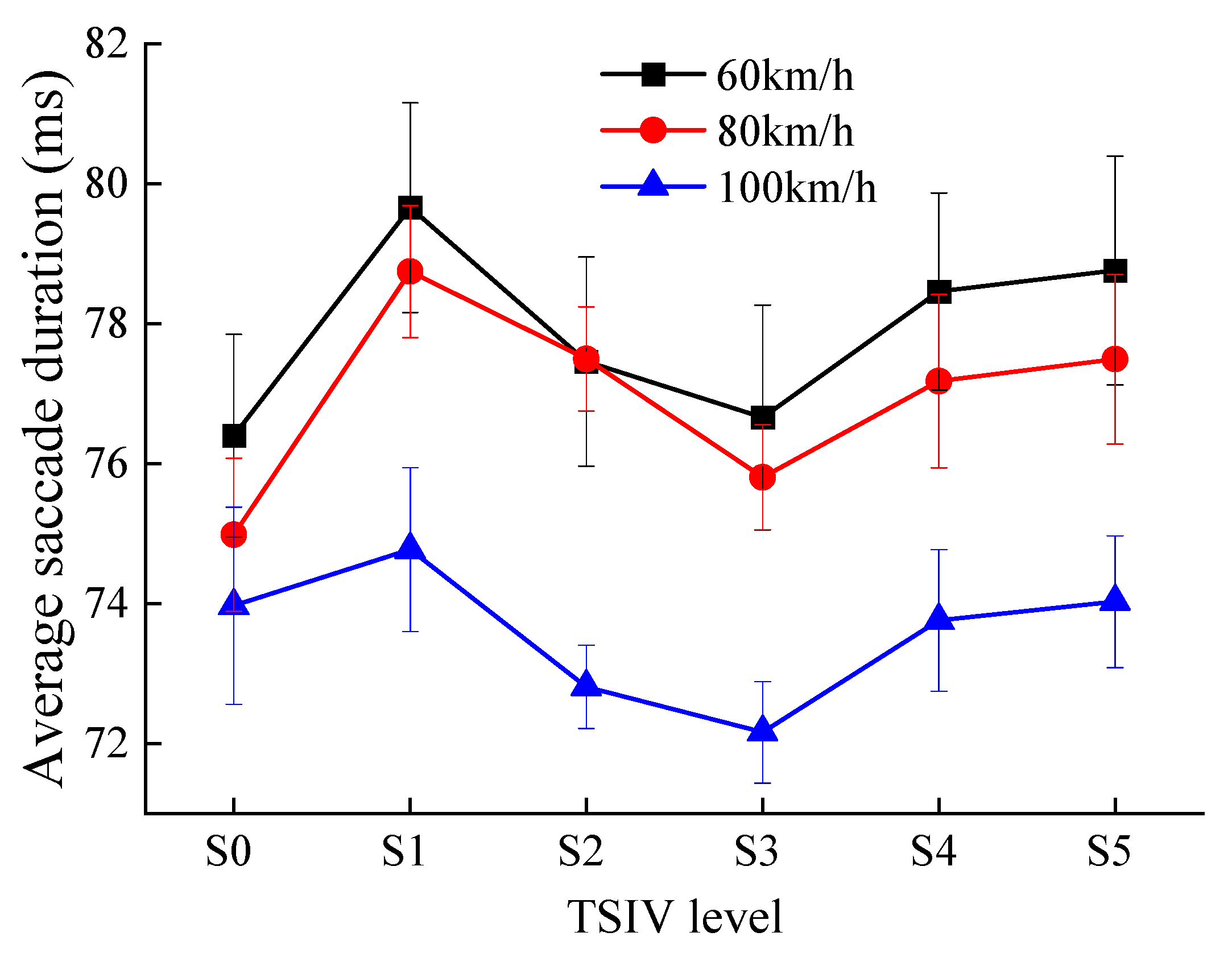
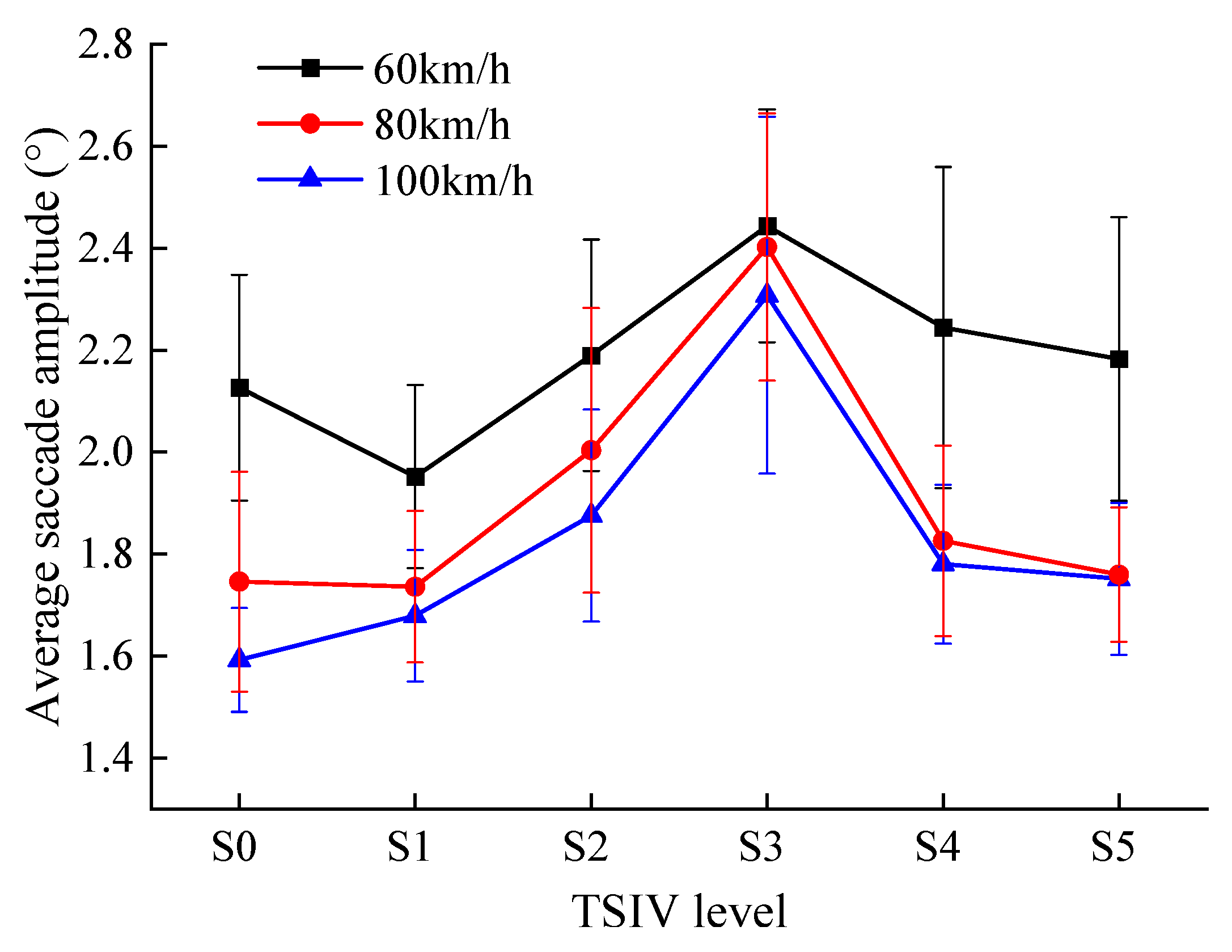
We define the first principal component as an evaluation indicator characterizing the driver’s search efficiency, the second principal component as an evaluation indicator of the driver’s capacity for information reception, and the third principal component as an evaluation indicator of the driver’s effort to acquire and perceive information by combining the meaning and weighting of each eye-movement indicator. The eye movement indicator with the highest weight in each principal component is chosen to replace the reduced dimensional composite indicator after taking into account the correlation between each eye movement indicator and each principal component. Finally, the three-eye movement sensitive indicators that are influenced by the TSIV throughout the driving process are identified as fixation duration (FD), saccade duration (SD), and saccade amplitude (SA).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}