
A Method for Locational Risk Estimation of Vehicle–Children Accidents Considering Children’s Travel Purposes


Abstract
:1. Introduction
2. Materials and Methods
2.1. Target Area
2.2. Data
2.2.1. Traffic Accident Data
2.2.2. Risk Exposure Data
- Number of elementary school students on the surrounding school routes (NSSR15, 50, 100): the number of elementary school students on the designated school route that passes within a radius of 15 m, 50 m, or 100 m from the center of each target intersection;
- Number of elementary school students at the surrounding gathering points (NSGP15, 50, 100): the number of elementary school students at the gathering points located within a radius of 15 m, 50 m, or 100 m from the center of each target intersection;
- Distance to the nearest school route (DSR): the distance from the center of each intersection to the nearest designated school route.
2.2.3. Other Data
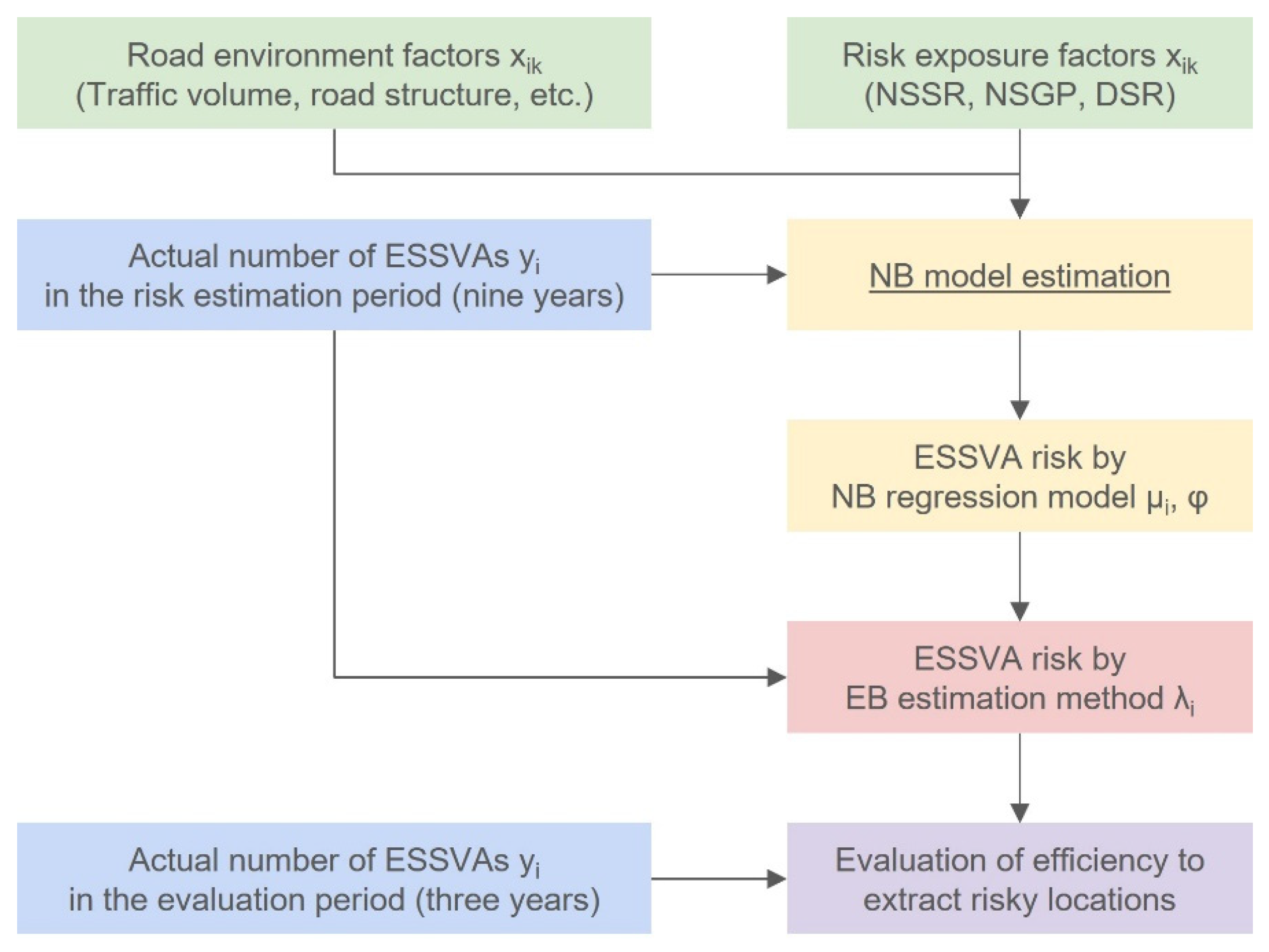
2.3. Statistical Model
2.3.1. Poisson Regression Model
2.3.2. Accident Risk Evaluation That Considers Location-Specific Factors
2.3.3. EB Estimation through an NB Regression Model
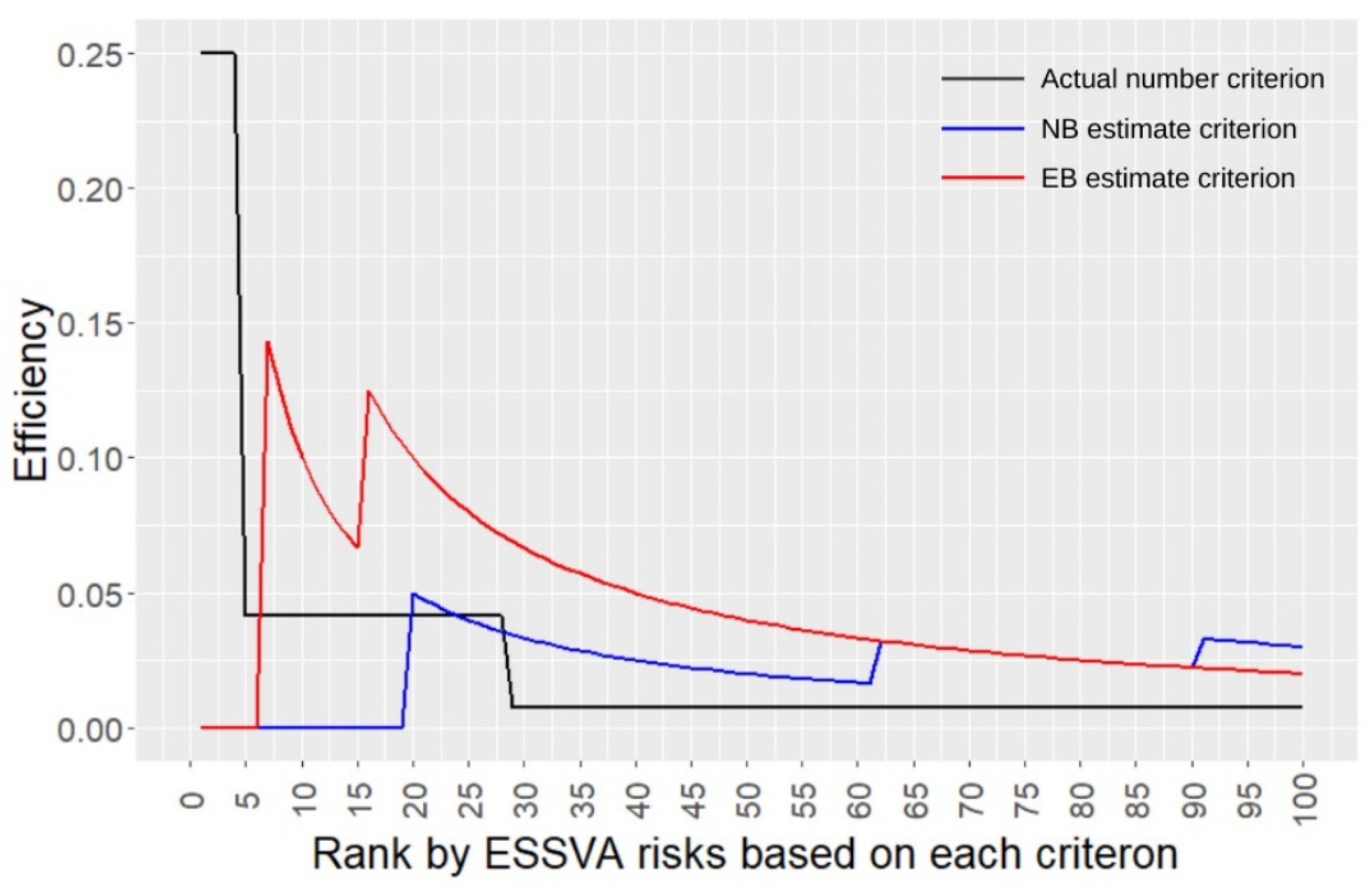
2.4. Evaluation of Efficiency to Extract Risky Locations
- Each location was ranked in order of riskiness based on the three criteria, respectively:
- Actual number criterion, i.e., the higher the actual number of ESSVAs in the risk estimation period (the first nine years), the higher the risk is;
- NB estimate criterion, i.e., the higher the expected number of ESSVAs calculated by the NB regression model, the higher the risk is;
- EB estimate criterion, i.e., the higher the expected number of ESSVAs corrected by the EB estimation method, the higher the risk is.
- Based on the rankings of the three criteria, the cumulative sums of the actual number of ESSVAs in the evaluation period (the last three years) up to the rank were, respectively calculated.
- The cumulative sums of the actual number of ESSVAs in the evaluation period for the three criteria were, respectively divided by the number of intersections up to the rank, which is the efficiency in this study.
3. Results
3.1. Aggregation Analyses
3.2. Estimation Results of the NB Regression Model
- ESSVA risk increased with vehicle traffic volume in both models, but the impact was less in the SCP model than in the NSCP model;
- ESSVA risk was higher at four-leg intersections than at three-leg intersections in the NCSP model, but there was no such effect of road structure in the SCP model;
- The SCP model showed a lower ESSVA risk at intersections near parks, but the NCSP model did not show such an effect;
- ESSVA risk was higher in areas with building use in both models, but was particularly strong in the SCP model;
- Intersections within the DID had lower ESSVA risk in the SCP model, but the effect is not shown in the NSCP model.
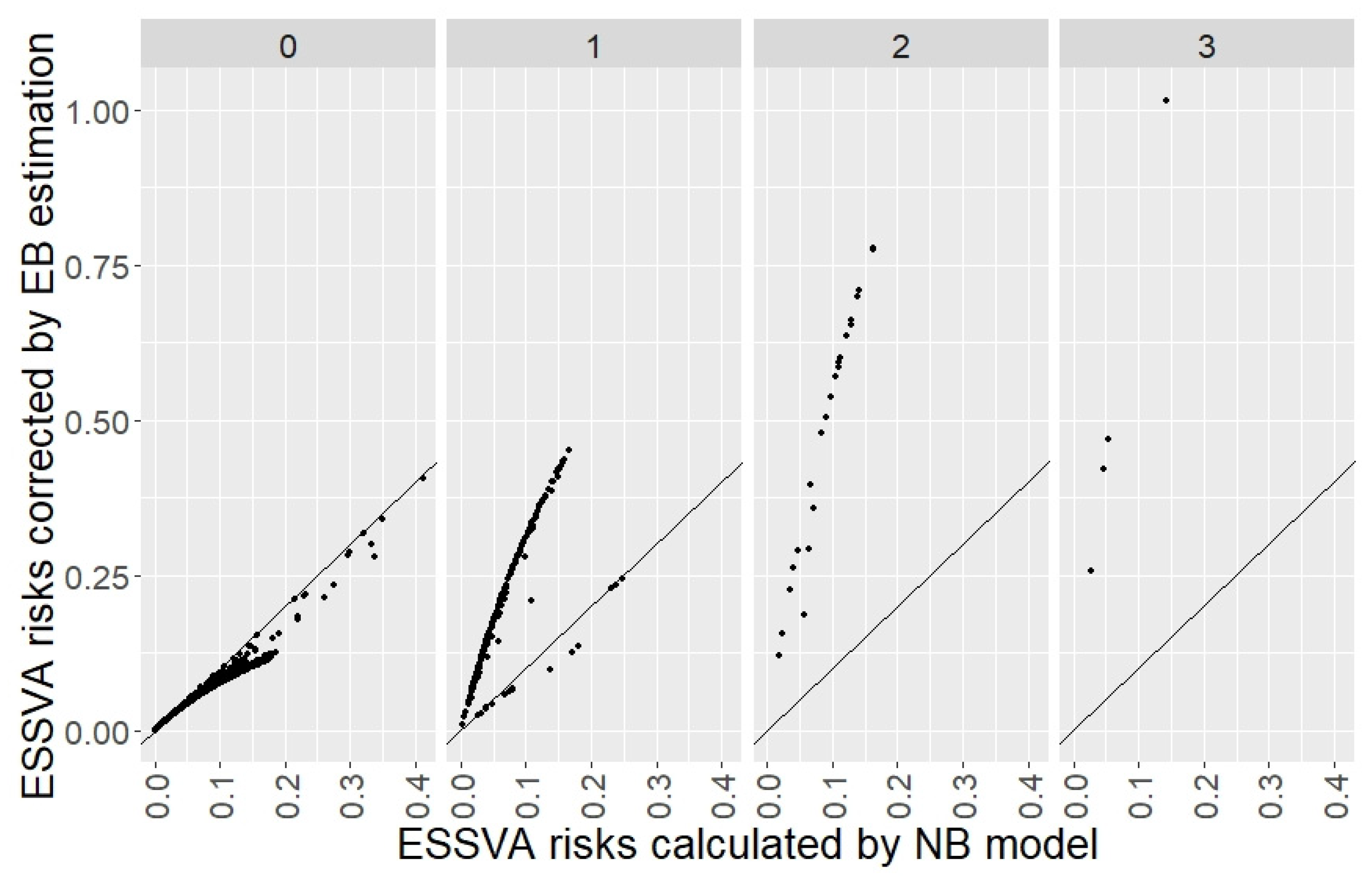
3.3. Results of the EB Estimation
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Youth and Road Safety; World Health Organization: Geneva, Switzerland, 2007. [Google Scholar]
- Kerr, J.; Rosenberg, D.; Sallis, J.F.; Saelens, B.E.; Frank, L.D.; Conway, T.L. Active commuting to school: Associations with environment and parental concerns. Med. Sci. Sport. Exerc. 2006, 38, 787–794. [Google Scholar] [CrossRef] [PubMed]
- Timperio, A.; Ball, K.; Salmon, J.; Roberts, R.; Giles-Corti, B.; Simmons, D.; Baur, L.A.; Crawford, D. Personal, family, social, and environmental correlates of active commuting to school. Am. J. Prev. Med. 2006, 30, 45–51. [Google Scholar] [CrossRef] [PubMed]
- Carver, A.; Timperio, A.; Hesketh, K.; Crawford, D. Are children and adolescents less active if parents restrict their physical activity and active transport due to perceived risk? Soc. Sci. Med. 2010, 70, 1799–1805. [Google Scholar] [CrossRef]
- Napier, M.A.; Brown, B.B.; Werner, C.M.; Gallimore, J. Walking to school: Community design and child and parent barriers. J. Environ. Psychol. 2011, 31, 45–51. [Google Scholar] [CrossRef]
- Fallah Zavareh, M.; Abolhasannejad, V.; Mamdoohi, A.; Nordfjærn, T. Barriers to children’s walking to school in Iranian and Chinese samples. Transp. Res. Part F Traffic Psychol. Behav. 2020, 73, 399–414. [Google Scholar] [CrossRef]
- Cooper, A.R.; Andersen, L.B.; Wedderkopp, N.; Page, A.S.; Froberg, K. Physical activity levels of children who walk, cycle, or are driven to school. Am. J. Prev. Med. 2005, 29, 179–184. [Google Scholar] [CrossRef]
- Rosenberg, D.E.; Sallis, J.F.; Conway, T.L.; Cain, K.L.; McKenzie, T.L. Active transportation to school over 2 years in relation to weight status and physical activity. Obesity 2006, 14, 1771–1776. [Google Scholar] [CrossRef] [PubMed]
- Nevelsteen, K.; Steenberghen, T.; Van Rompaey, A.; Uyttersprot, L. Controlling factors of the parental safety perception on children’s travel mode choice. Accid. Anal. Prev. 2012, 45, 39–49. [Google Scholar] [CrossRef]
- Shaw, B.; Bicket, M.; Elliott, B.; Fagan-Watson, B.; Mocca, E.; Hillman, M. Children’s Independent Mobility: An International Comparison and Recommendations for Action; Policy Studies Institute: London, UK, 2015. [Google Scholar]
- Waygood, E.O.D.; Susilo, Y.O. Walking to school in Scotland: Do perceptions of neighbourhood quality matter? IATSS Res. 2015, 38, 125–129. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; Taniguchi, A.; Ishigami, T.; Hirata, S. The Current Status and Transition of Japanese Children’s Travel Behavior. In Proceedings of the Infrastructure Planning 51, Fukuoka, Japan, 6–7 June 2015. [Google Scholar]
- World Health Organization. Global Recommendation on Physical Activity for Health; World Health Organization: Geneva, Switzerland, 2010. [Google Scholar]
- Lord, D.; Mannering, F. The statistical analysis of crash-frequency data: A review and assessment of methodological alternatives. Transp. Res. Part A Policy Pract. 2010, 44, 291–305. [Google Scholar] [CrossRef]
- Elias, W.; Shiftan, Y. Analyzing and modeling risk exposure of pedestrian children to involvement in car crashes. Accid. Anal. Prev. 2014, 62, 397–405. [Google Scholar] [CrossRef]
- Bennet, S.A.; Yiannakoulias, N. Motor-vehicle collisions involving child pedestrians at intersection and mid-block locations. Accid. Anal. Prev. 2015, 78, 94–103. [Google Scholar] [CrossRef] [PubMed]
- Lee, G.; Park, Y.; Kim, J.; Cho, G.-H. Association between intersection characteristics and perceived crash risk among school-aged children. Accid. Anal. Prev. 2016, 97, 111–121. [Google Scholar] [CrossRef] [PubMed]
- Hwang, J.; Joh, K.; Woo, A. Social inequalities in child pedestrian traffic injuries: Differences in neighborhood built environments near schools in Austin, TX, USA. J. Transp. Health 2017, 6, 40–49. [Google Scholar] [CrossRef]
- Rothman, L.; Howard, A.; Buliung, R.; Macarthur, C.; Richmond, S.A.; Macpherson, A. School environments and social risk factors for child pedestrian-motor vehicle collisions: A case-control study. Accid. Anal. Prev. 2017, 98, 252–258. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Inada, H.; Tomio, J.; Ichikawa, M.; Nakahara, S. Regional disparities in road traffic injury rates involving elementary and junior high school children while commuting among Japan’s 47 prefectures between 2004 and 2013. Accid. Anal. Prev. 2019, 125, 79–84. [Google Scholar] [CrossRef] [PubMed]
- Waygood, O.; Taniguchi, A.; Craig-St-Louis, C.; Xu, X. International Origins of Walking School Buses and Child Fatalities in Japan and Canada. Traffic Sci. 2015, 46, 30–42. [Google Scholar]
- Matsuo, K.; Ibrahim, N.D.; Miyazaki, K.; Sugiki, N. A Macroscopic Analysis of the Traffic Safety Effects of Group School Commuting for Elementary School Students. In Proceedings of the Infrastructure Planning 64, Online, 3–5 December 2021. [Google Scholar]
- Gipps, P.G. Examining the Safety Contributions of Traffic Control Devices. Transport Research for Social and Economic Progress. In Proceedings of the Second World Conference on Transport Research, London, UK, 14–17 April 1980; pp. 2604–2609. [Google Scholar]
- Abbess, C.; Jarrett, D.; Wright, C.C. Accidents at blackspots: Estimating the effectiveness of remedial treatment, with special reference to the “regression-to-mean” effect. Traffic Eng. Control 1981, 22, 535–542. [Google Scholar]
- Hauer, E. Observational Before/After Studies in Road Safety: Estimating the Effect of Highway and Traffic Engineering Measures on Road Safety; Emerald Publishing: London, UK, 1997; pp. 175–218. [Google Scholar]
- Hauer, E.; Harwood, D.W.; Council, F.M.; Griffith, M.S. Estimating safety by the Empirical Bayes method: A tutorial. Transp. Res. Rec. 2002, 1784, 126–131. [Google Scholar] [CrossRef]
- Ko, M.; Geedipally, S.R.; Walden, T.D.; Wunderlich, R.C. Effects of red light running camera systems installation and then deactivation on intersection safety. J. Saf. Res. 2017, 62, 117–126. [Google Scholar] [CrossRef]
- Tang, H.; Gayah, V.V.; Donnell, E.T. Crash modification factors for adaptive traffic signal control: An Empirical Bayes before-after study. Accid. Anal. Prev. 2020, 144, 105672. [Google Scholar] [CrossRef] [PubMed]
- Wood, J.; Donnell, E.T. Empirical Bayes before-after evaluation of horizontal curve warning pavement markings on two-lane rural highways in Pennsylvania. Accid. Anal. Prev. 2020, 146, 105734. [Google Scholar] [CrossRef] [PubMed]
- Matsuo, K.; Chigai, N.; Chattha, M.I.; Sugiki, N. Vulnerable road user safety evaluation using probe vehicle data with collision warning information. Accid. Anal. Prev. 2022, 165, 106528. [Google Scholar] [CrossRef] [PubMed]
- Jarrett, D.F.; Abbess, C.; Wright, C.C. Bayesian Methods Applied to Road Accident Black Spot Studies: Some Recent Progress; Institute for Road Safety Research (SWOV): Hague, The Netherlands, 1982; pp. 69–74. [Google Scholar]
- Hauer, E. Empirical Bayes approach to the estimation of “unsafety”: The multivariate regression method. Accid. Anal. Prev. 1992, 24, 457–477. [Google Scholar] [CrossRef]
- Ng, K.S.; Hung, W.T.; Wong, W.G. An algorithm for assessing the risk of traffic accident. J. Saf. Res. 2002, 33, 387–410. [Google Scholar] [CrossRef]
- Montella, A. A comparative analysis of hotspot identification methods. Accid. Anal. Prev. 2010, 42, 571–581. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Chung, K.; Kang, S. Evaluating and addressing the effects of regression to the mean phenomenon in estimating collision frequencies on urban high collision concentration locations. Accid. Anal. Prev. 2016, 97, 49–56. [Google Scholar] [CrossRef]
- Yang, B.Z.; Loo, B.P.Y. Land use and traffic collisions: A link-attribute analysis using Empirical Bayes method. Accid. Anal. Prev. 2016, 95, 236–249. [Google Scholar] [CrossRef] [PubMed]
- Chattha, M.I.; Matsuo, K.; Sugiki, N. Risk Analysis of Pedestrian and Bicycle Accidents at Intersections in Toyohashi City Using Empirical Bayes Method. J. East. Asia Soc. Transp. Stud. 2022, 14, 2093–2112. [Google Scholar]
- Lam, W.W.Y.; Yao, S.; Loo, B.P.Y. Pedestrian exposure measures: A time-space framework. Travel Behav. Soc. 2014, 11, 22–30. [Google Scholar] [CrossRef]
- Yao, S.; Loo, B.P.; Lam, W.W. Measures of activity-based pedestrian exposure to the risk of vehicle-pedestrian collisions: Space-time path vs. potential path tree methods. Accid. Anal. Prev. 2015, 75, 320–332. [Google Scholar] [CrossRef] [PubMed]
- Papadimitriou, E. Towards an integrated approach of pedestrian behaviour and exposure. Accid. Anal. Prev. 2016, 92, 139–152. [Google Scholar] [CrossRef] [PubMed]
- Xie, S.Q.; Dong, N.; Wong, S.C.; Huang, H.; Xu, P. Bayesian approach to model pedestrian crashes at signalized intersections with measurement errors in exposure. Accid. Anal. Prev. 2018, 121, 285–294. [Google Scholar] [CrossRef] [PubMed]
- Sahdan, H.; Matsuo, K.; Sugiki, N. Statistical Model Analyses of Traffic Accidents Involving Elementary Students at Intersections Considering Exposure Factors. In Proceedings of the 12th International Symposium on City Planning and Environment Management in Asian Countries, Seoul, Korea, 1–4 November 2019. [Google Scholar]
- Davis, G.A. Method for estimating effect of traffic volume and speed on pedestrian safety for residential streets. Transp. Res. Rec. 1998, 1636, 110–115. [Google Scholar] [CrossRef]
- Wang, Y.; Kockelman, K.M. A Poisson-lognormal conditional-autoregressive model for multivariate spatial analysis of pedestrian crash counts across neighborhoods. Accid. Anal. Prev. 2013, 60, 71–84. [Google Scholar] [CrossRef] [PubMed]
- Ghosh, M.; Meeden, G. Empirical Bayes estimation in finite population sampling. J. Am. Stat. Assoc. 1986, 81, 1058–1062. [Google Scholar] [CrossRef]
- Japan Cabinet Office, Government of Japan. Securing Traffic Safety in School Roads. In White Paper on Traffic Safety in Japan 2014; Japan Cabinet Office, Government of Japan: Tokyo, Japan, 2015. [Google Scholar]
- Jones, S.J.; Lyons, R.A.; John, A.; Palmer, S.R. Traffic calming policy can reduce inequalities in child pedestrian injuries: Database study. Inj. Prev. 2005, 11, 152–156. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Matsuo, K.; Sugihara, M.; Yamazaki, M.; Mimura, Y.; Yang, J.; Kanno, K.; Sugiki, N. Hierarchical Bayesian modeling to evaluate the impacts of intelligent speed adaptation considering individuals’ usual speeding tendencies: A correlated random parameters approach. Anal. Methods Accid. Res. 2020, 27, 100125. [Google Scholar] [CrossRef]
- Nguyen, A.; Borghese, M.M.; Janssen, I. Pedestrian traffic safety and outdoor active play among 10–13 year olds living in a mid-sized city. Prev. Med. Rep. 2018, 10, 304–309. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Unit of Analysis and Sample Size | Dependent Variable | Exposure | Other Factors | Method/Model | Country |
|---|---|---|---|---|---|---|
| [15] | Households 79 cases/ 110 controls | Presence/absence of crashes PMVCs 1 5–17 age children 2008–2012 | Number of trips/tours by questionnaire Walking time by questionnaire | Travel (daily activity) pattern Residential neighborhood type Age/Gender Parents’ work/Income | Case–control study Logistic regression model | Israel |
| [16] | Road segments 92 cases/ 368 controls Intersections 107 cases/ 428 controls | Presence/absence of crashes PMVCs 1 Weekdays, September to June, 7 a.m.–5 p.m. 5–14 age children 2002–2011 | Child activity estimated by journey allocation model based on shortest route/ preferred route/ population | Intersection control type Crossing guard Average traffic flow Speed limit/One-way Land use Within 150 m of schools Road structures | Case–control study Logistic regression model | Canada |
| [17] | 546 intersections | Number of perceived crash risk 10–12 age children 2015 Number of crashes PMVCs 1 2007–2014 | Children crossing estimated by questionnaire | Population density Street density Park Student facility Road structures Traffic calming Building Land use | Negative binomial regression model Zero-inflated negative binomial regression model | Korea |
| [18] | 5703 road segments | Presence/absence of crashes PMVCs 1 Within 0.25 mile from schools 5–19 age children 2010–2014 | Child population density | Bus stop Road class Road structures Land use Race | Logistic regression model | USA |
| [19] | School attendance boundaries 50 case/ 50 control | Highest/lowest quartile of crashes rate PMVCs 1 School travel time crashes 4–12 age children 2000–2013 | Proportion of children walking to school by observation at schools | One-way Crossing guard Traffic light Traffic calming Land use Higher school disadvantage Inner suburbs/downtown | Case–control study Logistic regression model | Canada |
| [20] | 47 prefectures | Killed or seriously injured children (KSI) rate Elementary Pedestrian 6–12 years Junior high bicycle and pedestrian 12–15 years | Child population | Travel purpose Proportion of population in DID 3 | Multiple linear regression model | Japan |
| This study | 7719 intersections | Number of crashes ESSVAs 2 2007–2014” | Number of students on the surrounding school routes/gathering points Distance to the nearest school route | Travel purpose Road structures Traffic light Park Land use DID 3 | Negative binomial regression model Empirical Bayes estimation | Japan |
| Explanatory Variable | SCP Model | NCSP Model | ||
|---|---|---|---|---|
| Constant term | −9.77 *** | 0.00006 | −4.78 *** | 0.00840 |
| Children’s risk exposure: | ||||
| NSSR15 1 | 0.0129 *** | 1.013 | ||
| DSR 2 | −0.00771 *** | 0.992 | ||
| Natural logarithm of probe vehicle pass count | 0.342 * | 1.035 | 0.198 *** | 1.22 |
| Number of intersection legs (reference to three legs): | ||||
| four legs | 0.717 *** | 2.05 | ||
| five or more legs | 0.399 | 1.50 | ||
| Distance to the nearest park ≤ 200 m (reference to more than 200 m) | −0.976 # | 0.377 | ||
| Area land use (reference to other land uses): | ||||
| high-rise buildings | 3.87 ** | 47.9 | 0.461 | 1.59 |
| low-density low-rise buildings | 1.91 # | 6.75 | 0.594 ** | 1.81 |
| high-density low-rise buildings | 3.75 ** | 42.5 | 0.291 | 1.34 |
| DID areas (reference to non−DID areas): | −1.32 # | 0.267 | ||
| Sample size (number of intersections) | 7719 | 7719 | ||
| McFadden’s likelihood ratio | 0.27 | 0.12 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matsuo, K.; Miyazaki, K.; Sugiki, N. A Method for Locational Risk Estimation of Vehicle–Children Accidents Considering Children’s Travel Purposes. Int. J. Environ. Res. Public Health 2022, 19, 14123. https://doi.org/10.3390/ijerph192114123
Matsuo K, Miyazaki K, Sugiki N. A Method for Locational Risk Estimation of Vehicle–Children Accidents Considering Children’s Travel Purposes. International Journal of Environmental Research and Public Health. 2022; 19(21):14123. https://doi.org/10.3390/ijerph192114123
Chicago/Turabian StyleMatsuo, Kojiro, Kosuke Miyazaki, and Nao Sugiki. 2022. "A Method for Locational Risk Estimation of Vehicle–Children Accidents Considering Children’s Travel Purposes" International Journal of Environmental Research and Public Health 19, no. 21: 14123. https://doi.org/10.3390/ijerph192114123
APA StyleMatsuo, K., Miyazaki, K., & Sugiki, N. (2022). A Method for Locational Risk Estimation of Vehicle–Children Accidents Considering Children’s Travel Purposes. International Journal of Environmental Research and Public Health, 19(21), 14123. https://doi.org/10.3390/ijerph192114123