
Risk-Based Bi-Level Model for Simultaneous Profit Maximization of a Smart Distribution Company and Electric Vehicle Parking Lot Owner


 and
and 
Abstract
:1. Introduction
- Presenting a new risk-based bi-level model with respect to the SDISCO and PL owner and uncertainties.
- Creating a linear single-level model by using KKT conditions and auxiliary binary variables.
- Considering simultaneously RERs and EVs, as well as PBDR and IBDR programs and their uncertainties for the optimal operation of SDISCO.
- Presenting a risk aversion parameter and market price sensitivity analysis of the optimal operation of SDISCO.
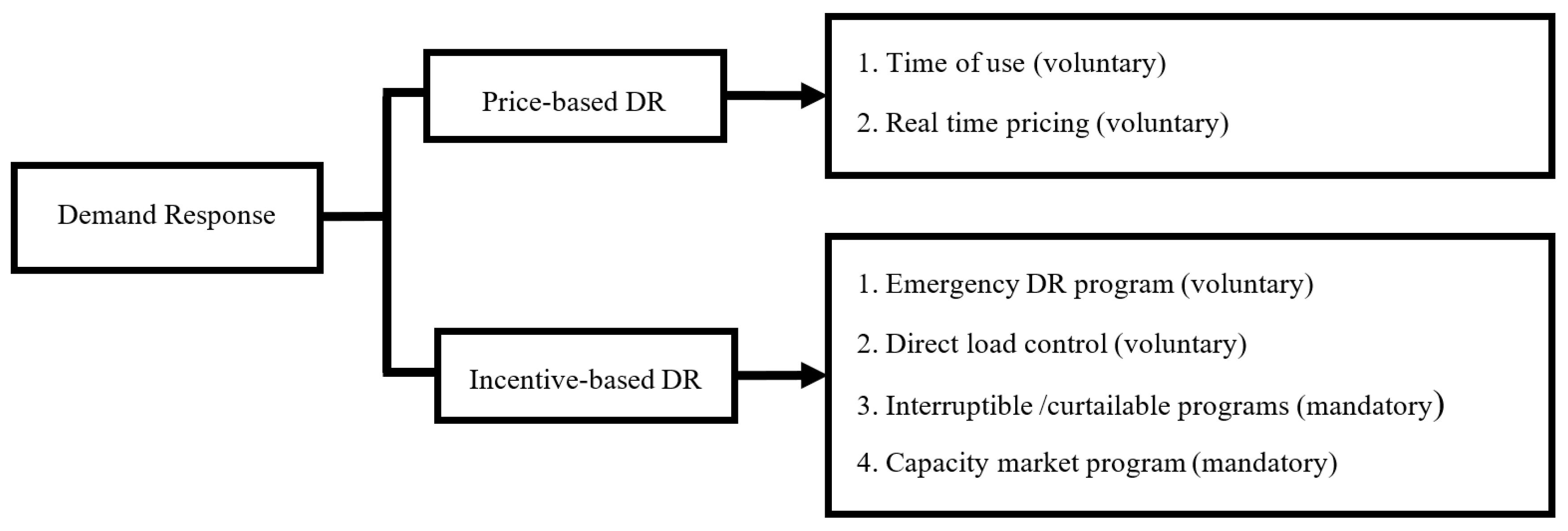
2. Load-Based DR Model
3. Problem Formulation
3.1. Bi-Level Model
3.2. Reformulation as Mathematical Programming with Equilibrium Constraints
- Upper level constraints
- Lower level constraints
- Optimization constraints of KKT
- Complementarily constraints of KKT
3.3. Risk-Based Bi-Level Model
3.4. Problem Solving Process
- Wind generating units’ uncertainty: Because wind speed is intermittent, many experiments prove that stochastic wind speed in many regions roughly pursues the Weibull PDF. The output of the wind unit can be obtained through the linear relationship between wind speed and wind turbine output [41].
- Solar generating sources uncertainty: Predominantly illumination intensity affects the output of PV. In [41], it is shown that the distribution of solar irradiance is characterized by using of Weibull PDF. The output of PV can be obtained through the linear relationship between irradiance and photovoltaic array output.
- Arrival time of EV to PL uncertainty
- Departure time of EV to PL uncertainty
- Initial SOC of EV uncertainty
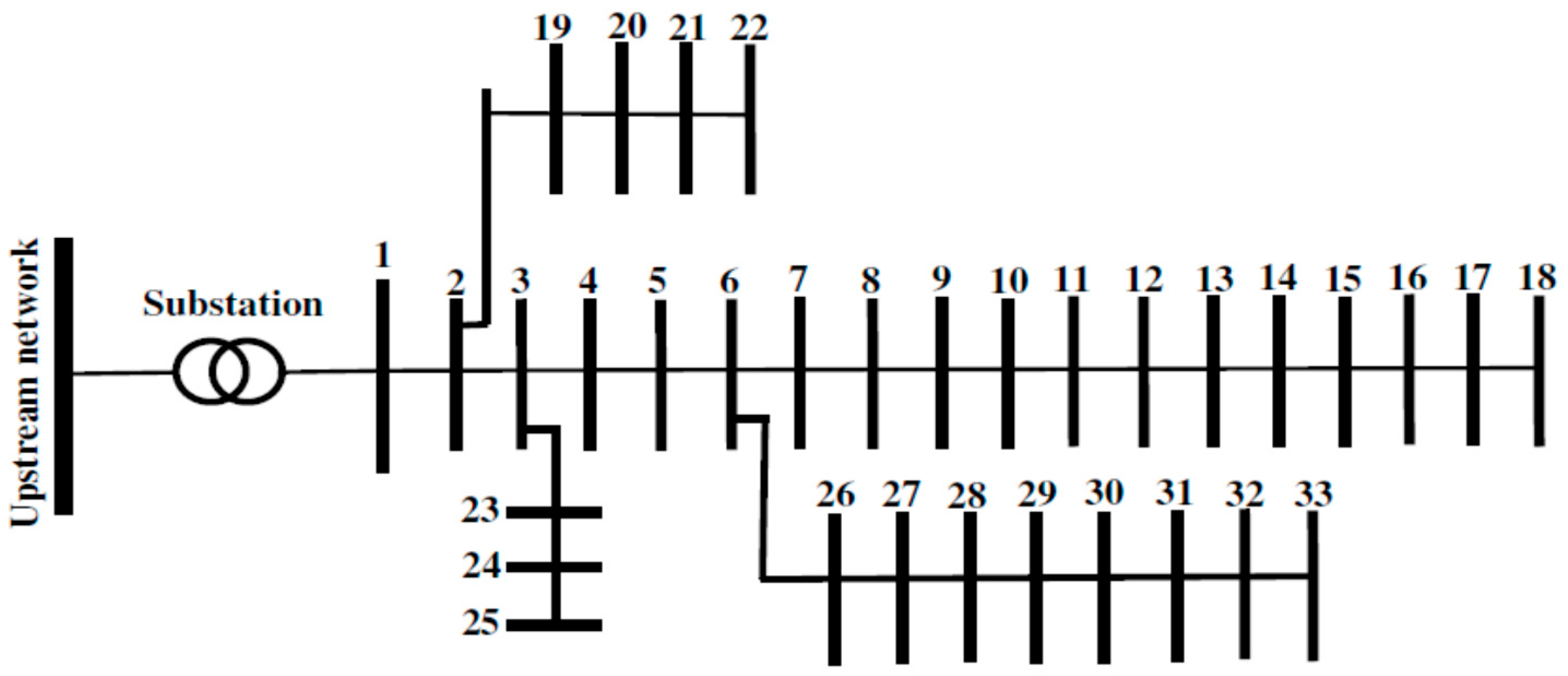
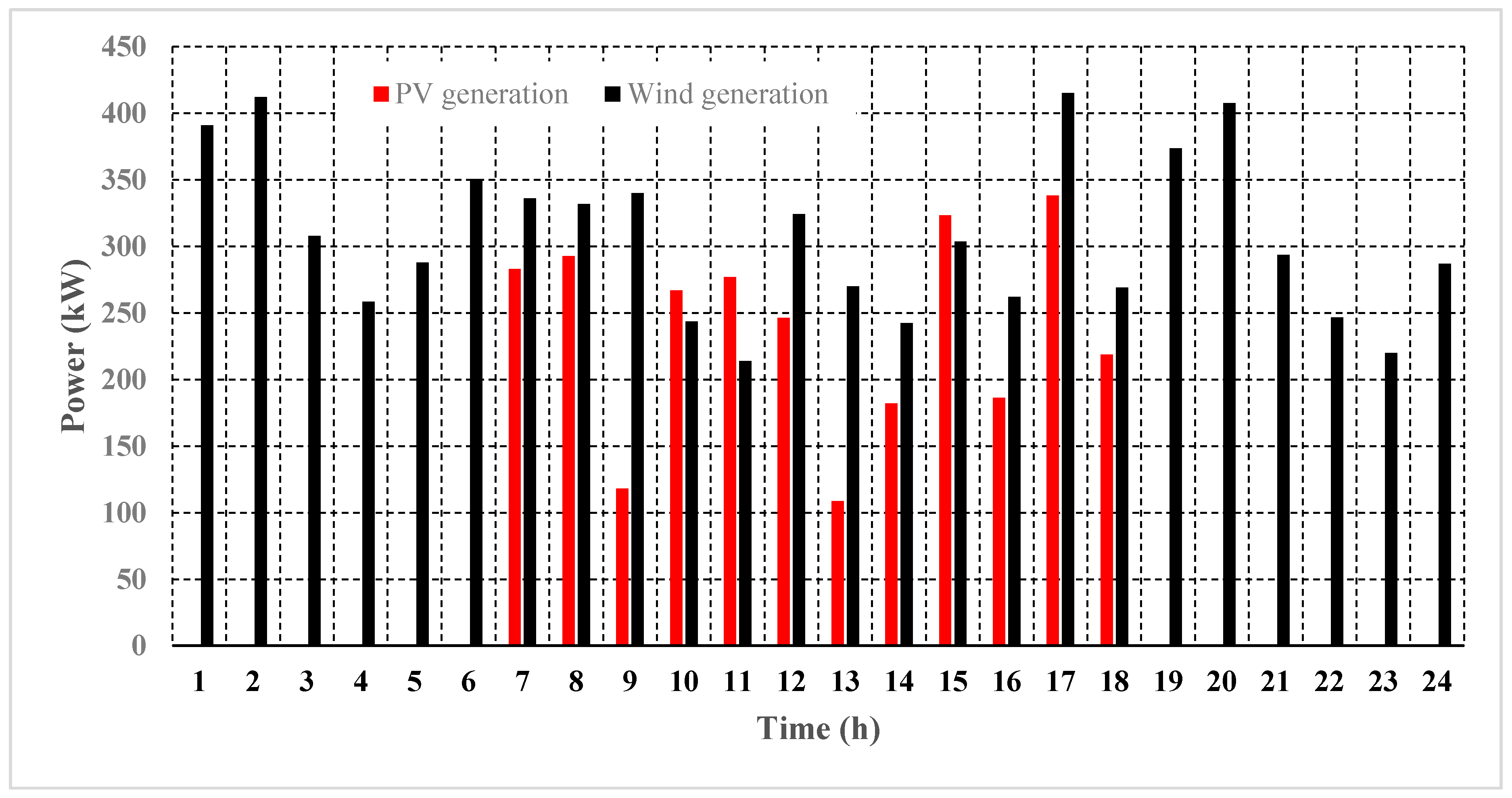
4. Numerical Results
5. Conclusions
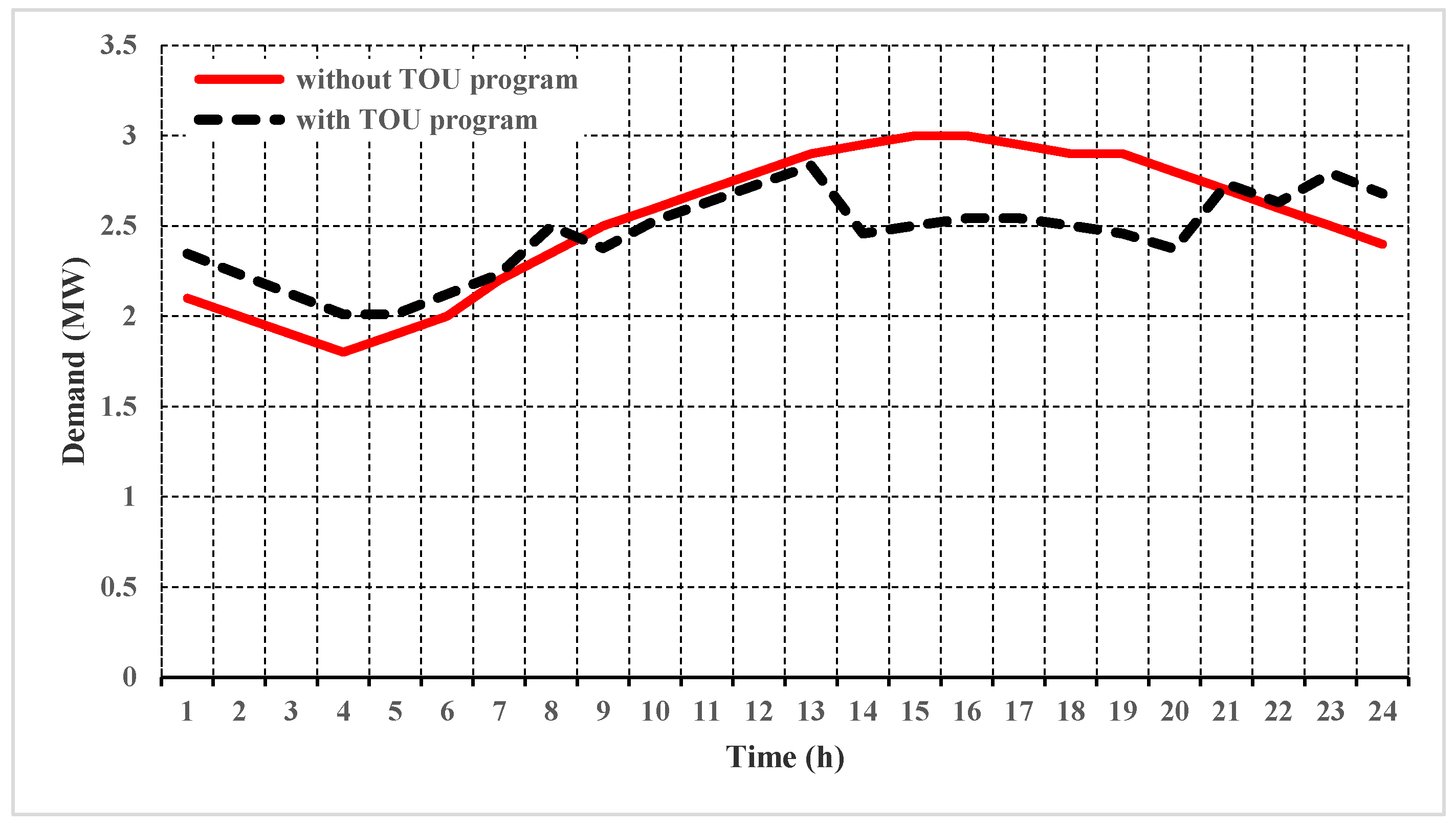
- In this model, in each case (with/without taking into account risk), by the implementation of the TOU program, the SDISCO achieved more profit due to selling more energy to the customers and PL.
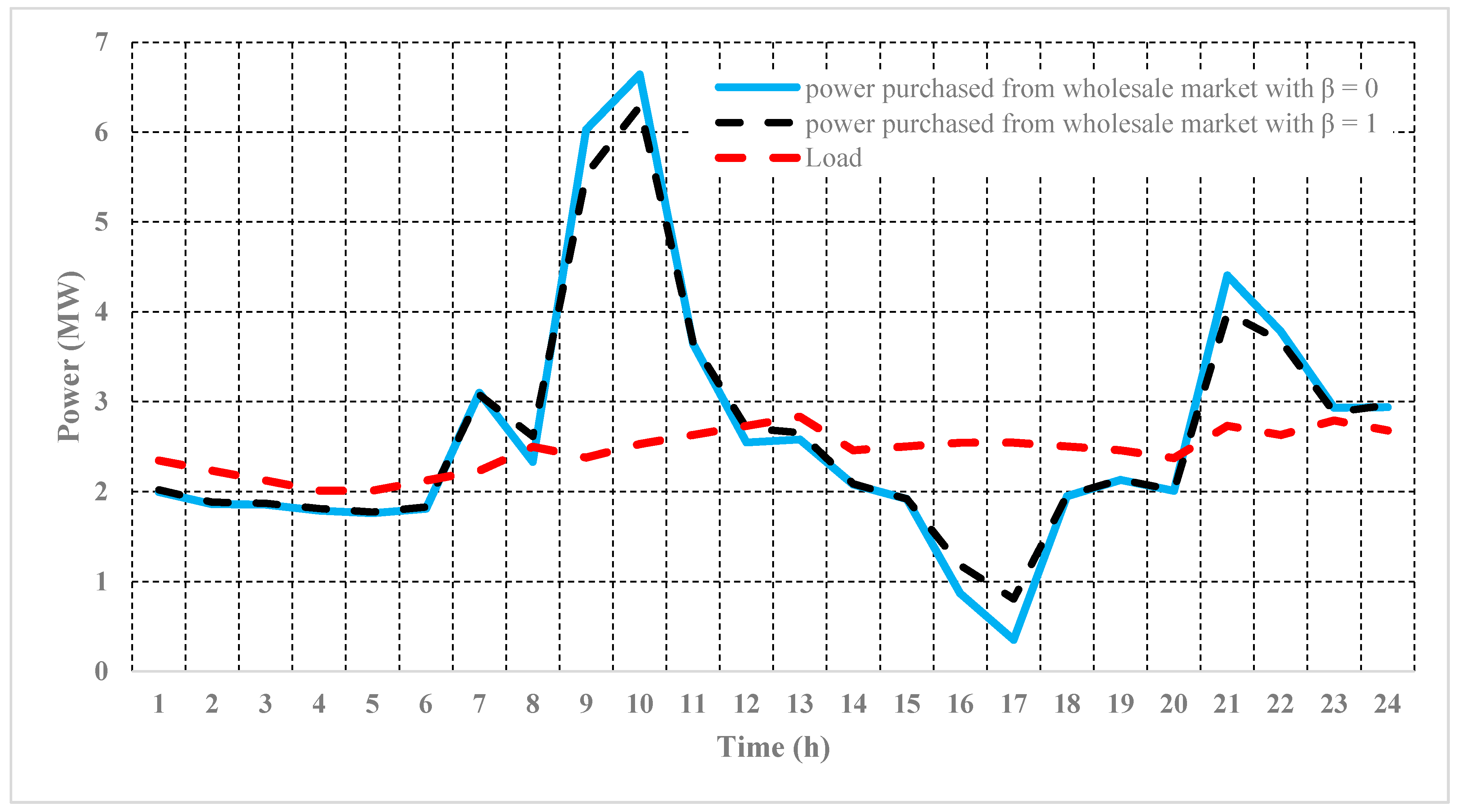
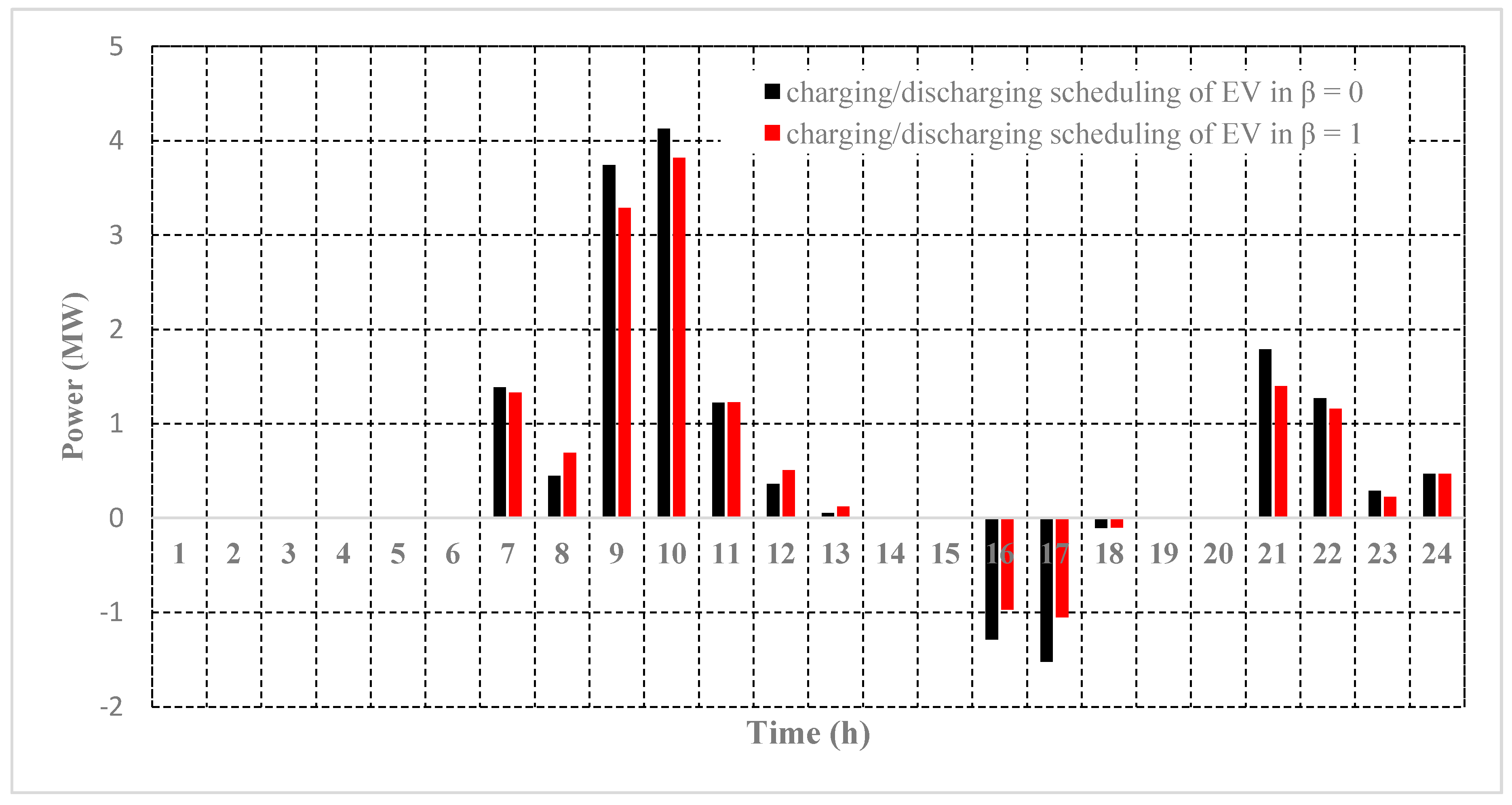
- By using proper charging/discharging scheduling of EVs, EVs’ charging was carried out at the off-peak or mid-peak periods. Moreover, EVs’ discharging occurred during the on-peak period. This discharging could not happen at 14:00, 15:00, 19:00 and 20:00, because in these time slots, the price of the EVs’ discharging power was higher than the one of the wholesale market, so the SDISCO preferred to provide energy from the wholesale market.
- By taking the risk into account, i.e., β = 1, SDISCO has obtained less profit, because of purchasing more energy from the wholesale market and also due to low charging/discharging of EVs.
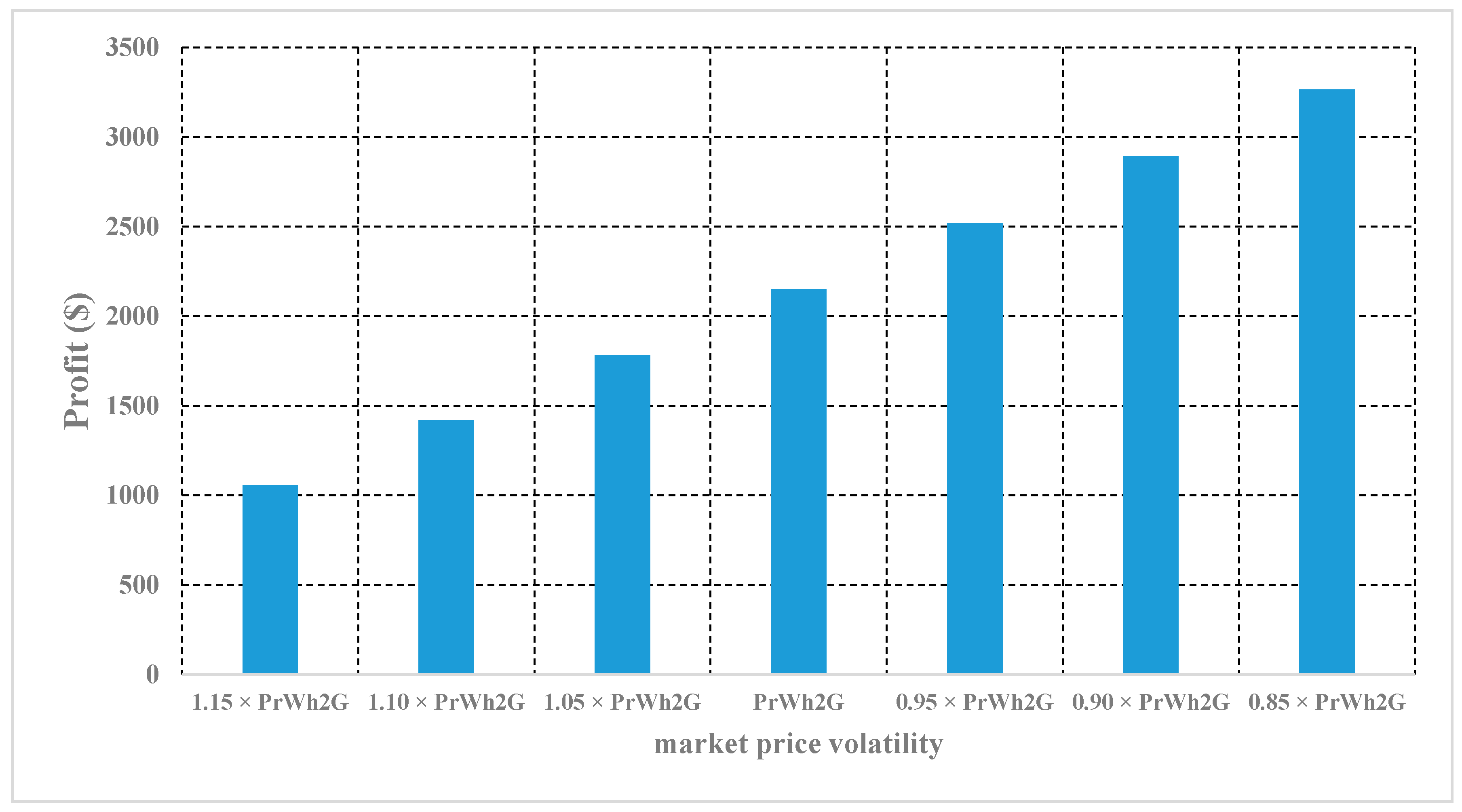
- By increasing/decreasing the price of electricity, the profit of SDISCO decreases/increases.
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Indices | |||
| b, b′ | Index for branch or bus | ηdch | Discharging efficiency (%) |
| F | Index for linear partitions in linearization | Rb, b′ | Resistance of branch b, b′ (Ω) |
| S, s | Index for scenarios | Xb, b′ | Reactance of branch b, b′ (Ω) |
| Sb | Index for slack bus | Z | Impedance (Ω) |
| t, t′, T | Index for time (hour) | VRated | Nominal voltage (V) |
| n, N | Index for EV number | Imax, b, b′ | Maximum current of branch b, b′ (A) |
| Parameters | ΔS | Upper limit in the discretization of quadratic flow terms (kVA) | |
| tarv | Arrival time of EVs to the PL | SOCdep | Desired final SOC of EV at departure time (kWh) |
| tdep | Departure time of EVs from the PL | SOCarv | Initial SOC of EV at arrival time to the PL (kWh) |
| Pr0(t) | Initial electricity price in t-th hour ($/kWh) | Pmax | Charging or discharging rate (kWh) |
| Pr(t) | Electricity price in t-th hour after DR ($/kWh) | Sb | Apparent power in bus b (kVA) |
| E(t,t) | Self-elasticity | α | Confidence level |
| E(t,t′) | Cross-elasticity | β | Risk aversion parameter |
| P0(t) | Initial demand value in t-th hour (kW) | variable | |
| P(t) | Customer demand in t-th hour after DR (kW) | Pch | Power purchased for EVs charging (kW) |
| PEN(t) | Penalty in t-th hour ($/kWh) | Pdch | Power purchased of PL by SDISCO (kW) |
| A(t) | Incentive of DR programs in t-th hour ($/kWh) | PWh2G | Power purchased from the wholesale market by SDISCO (kW) |
| ρs | Probability of each scenario | QWh2G | SDISCO′s reactive power (kVAR) |
| PL | Customer demand before DR (kW) | P+ | Active power flows in downstream directions (kW) |
| PL,DR | Customer demand after DR (kW) | P− | Active power flows in upstream directions (kW) |
| QL, DR | Customer′s reactive power after DR (kVAR) | Q+ | Reactive power flows in downstream directions (kVAR) |
| PrG2PL | Price of power purchased of SDISCO by PL ($/kWh) | Q− | Reactive power flows in upstream directions (kVAR) |
| PrG2L,DR | Price of electricity after DR ($/kWh) | PLoss | Energy loss of SDISCO (kW) |
| PrPL2G | Price of power purchased of PL by SDISCO ($/kWh) | I,I2 | Current flow (A), squared current flow (A2) |
| PrWh2G | Price of power purchased from wholesale market ($/kWh) | V,V2 | Voltage (V), squared voltage (V2) |
| PrPL2EV | Price of power purchased of PL by EV ($/kWh) | X | Binary variable used for linearization of the complementary slackness conditions |
| Imax | Maximum allowable line current (A) | λ | Dual variable ($/kWh) |
| Vmin | Minimum allowable voltage (V) | Bs | Profit in scenario s |
| Vmax | Maximum allowable voltage (V) | ηs | Auxiliary variable to calculate CVaR in scenario s |
| PW,max | Maximum output power of wind unit (kW) | ξ | Value-at-risk |
| PPV,max | Maximum output power of PV unit (kW) | SOC | State of charger (kWh) |
| Sbmax | Maximum apparent power in bus b (kVA) | Others | |
| Ccd | Cost of equipment depreciation ($/kWh) | C | greater than or equal to zero constraint |
| SOCmin | Minimum rate of SOC (kWh) | L | Lagrangian function |
| SOCmax | Maximum rate of SOC (kWh) | M | Large constants |
| ηch | Charging efficiency (%) | ||
References
- Fernandez, L.P.; San Román, T.G.; Cossent, R.; Domingo, C.M.; Frias, P. Assessment of the impact of plug-in electric vehicles on distribution networks. IEEE Trans. Power Syst. 2011, 26, 206–213. [Google Scholar] [CrossRef]
- ElNozahy, M.S.; Salama, M.M.A. A comprehensive study of the impacts of PHEVs on residential distribution networks. IEEE Trans. Sustain. Energy 2014, 5, 332–342. [Google Scholar] [CrossRef]
- Weiller, C. Plug-in hybrid electric vehicle impacts on hourly electricity demand in the United States. Energy Policy 2011, 39, 3766–3778. [Google Scholar] [CrossRef]
- Mullan, J.; Harries, D.; Bräunl, T.; Whitely, S. Modelling the impacts of electric vehicle recharging on the Western Australian electricity supply system. Energy Policy 2011, 39, 4349–4359. [Google Scholar] [CrossRef]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Mithulananthan, N. A review on the state-of-the-art technologies of electric vehicle, its impacts and prospects. Renew. Sustain. Energy Rev. 2015, 49, 365–385. [Google Scholar] [CrossRef]
- Jiménez, A.; García, N. Voltage unbalance analysis of distribution systems using a three-phase power flow ans a Genetic Algorithm for PEV fleets scheduling. In Proceedings of the Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. [Google Scholar]
- Shareef, H.; Islam, M.M.; Mohamed, A. A review of the stage-of-the-art charging technologies, placement methodologies, and impacts of electric vehicles. Renew. Sustain. Energy Rev. 2016, 64, 403–420. [Google Scholar] [CrossRef]
- Salman, H.; Muhammad, K.; Umar, R. Impact analysis of vehicle-to-grid technology and charging strategies of electric vehicles on distribution networks—A review. J. Power Sources 2015, 277, 205–214. [Google Scholar]
- Moses, P.S.; Deilami, S.; Masoum, A.S.; Masoum, M.A. Power quality of smart grids with plug-in electric vehicles considering battery charging profile. In Proceedings of the 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), Gothenburg, Sweden, 11–13 October 2010; pp. 1–7. [Google Scholar]
- Razeghi, G.; Zhang, L.; Brown, T.; Samuelsen, S. Impacts of plug-in hybrid electric vehicles on a residential transformer using stochastic and empirical analysis. J. Power Sources 2014, 252, 277–285. [Google Scholar] [CrossRef]
- Akhavan-Rezai, E.; Shaaban, M.F.; El-Saadany, E.F.; Zidan, A. Uncoordinated charging impacts of electric vehicles on electric distribution grids: Normal and fast charging comparison. In Proceedings of the Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–7. [Google Scholar]
- Aziz, M.; Oda, T.; Mitani, T.; Watanabe, Y.; Kashiwagi, T. Utilization of Electric Vehicles and Their Used Batteries for Peak-Load Shifting. Energies 2015, 8, 3720–3738. [Google Scholar] [CrossRef]
- Lotfy, M.E.; Senjyu, T.; Farahat, M.A.-F.; Abdel-Gawad, A.F.; Matayoshi, H. A Polar Fuzzy Control Scheme for Hybrid Power System Using Vehicle-To-Grid Technique. Energies 2017, 10, 1083. [Google Scholar] [CrossRef]
- Bhattarai, B.P.; Myers, K.S.; Bak-Jensen, B.; Paudyal, S. Multi-Time Scale Control of Demand Flexibility in Smart Distribution Networks. Energies 2017, 10, 37. [Google Scholar] [CrossRef]
- Zakariazadeh, A.; Shahram, J.; Pierluigi, S. Multi-objective scheduling of electric vehicles in smart distribution system. Energy Convers. Manag. 2014, 79, 43–53. [Google Scholar] [CrossRef]
- Lorf, C.; Martínez-Botas, R.F.; Howey, D.A.; Lytton, L.; Cussons, B. Comparative analysis of the energy consumption and CO2 emissions of 40 electrics, plug-in hybrid electric, hybrid electric and internal combustion engine vehicles. Transp. Res. Part D Transp. Environ. 2013, 23, 12–19. [Google Scholar] [CrossRef]
- Sioshansi, R.; Miller, J. Plug-in hybrid electric vehicles can be clean and economical in dirty power systems. Energy Policy 2011, 39, 6151–6161. [Google Scholar] [CrossRef]
- Tulpule, P.J.; Marano, V.; Yurkovich, S.; Rizzoni, G. Economic and environmental impacts of a PV powered workplace parking garage charging station. Appl. Energy 2013, 108, 323–332. [Google Scholar] [CrossRef]
- Marra, F.; Yang, G.Y.; Træholt, C.; Larsen, E.; Østergaard, J.; Blažič, B.; Deprez, W. EV charging facilities and their application in LV feeders with photovoltaics. IEEE Trans. Smart Grid 2013, 4, 1533–1540. [Google Scholar] [CrossRef]
- Luo, X.; Xia, S.; Chan, K.W. A decentralized charging control strategy for plug-in electric vehicles to mitigate wind farm intermittency and enhance frequency regulation. J. Power Sources. 2014, 248, 604–614. [Google Scholar] [CrossRef]
- Wu, T.; Yang, Q.; Bao, Z.; Yan, W. Coordinated energy dispatching in microgrid with wind power generation and plug-in electric vehicles. IEEE Trans. Smart Grid 2013, 4, 1453–1463. [Google Scholar] [CrossRef]
- Su, W.; Wang, J.; Roh, J. Stochastic energy scheduling in microgrids with intermittent renewable energy resources. IEEE Trans. Smart Grid 2014, 5, 1876–1883. [Google Scholar] [CrossRef]
- Jin, C.; Sheng, X.; Ghosh, P. Optimized electric vehicle charging with intermittent renewable energy sources. IEEE J. Sel. Top. Signal Process. 2014, 8, 1063–1072. [Google Scholar] [CrossRef]
- Aalami, H.; Yousefi, G.R.; Moghadam, M.P. Demand response model considering EDRP and TOU programs. In Proceedings of the Transmission and Distribution Conference and Exposition, T&D. IEEE/PES, Chicago, IL, USA, 21–24 April 2008; pp. 1–6. [Google Scholar]
- Aalami, H.A.; Moghaddam, M.P.; Yousefi, G.R. Demand response modeling considering interruptible/curtailable loads and capacity market programs. Appl. Energy 2010, 87, 243–250. [Google Scholar] [CrossRef]
- Aalami, H.A.; Moghaddam, M.P.; Yousefi, G.R. Modeling and prioritizing demand response programs in power markets. Electr. Power Syst. Res. 2010, 80, 426–435. [Google Scholar] [CrossRef]
- Conejo, A.J.; Carrión, M.; Morales, J.M. Decision Making Under Uncertainty in Electricity Markets; Springer: New York, NY, USA, 2010; Volume 1, Available online: http://www.springer.com/gp/book/9781441974204 (accessd on 23 September 2017).
- Alipour 2010, M.; Mohammadi-Ivatloo, B.; Zare, K. Stochastic risk-constrained short-term scheduling of industrial cogeneration systems in the presence of demand response programs. Appl. Energy 2014, 136, 393–404. [Google Scholar] [CrossRef]
- Tan, Z.; Wang, G.; Ju, L.; Tan, Q.; Yang, W. Application of CVaR risk aversion approach in the dynamical scheduling optimization model for virtual power plant connected with wind-photovoltaic-energy storage system with uncertainties and demand response. Energy 2017, 124, 198–213. [Google Scholar] [CrossRef]
- Dolatabadi, A.; Mohammadi-Ivatloo, B. Stochastic risk-constrained scheduling of smart energy hub in the presence of wind power and demand response. Appl. Therm. Eng. 2017, 123, 40–49. [Google Scholar] [CrossRef]
- Esmaeeli, M.; Kazemi, A.; Shayanfar, H.; Chicco, G.; Siano, P. Risk-based planning of the distribution network structure considering uncertainties in demand and cost of energy. Energy 2017, 119, 578–587. [Google Scholar] [CrossRef]
- Esmaeeli, M.; Kazemi, A.; Shayanfar, H.; Haghifam, M.R.; Siano, P. Risk-based planning of distribution substation considering technical and economic uncertainties. Electr. Power Syst. Res. 2016, 135, 18–26. [Google Scholar] [CrossRef]
- Larimi, S.M.M.; Haghifam, M.R.; Moradkhani, A. Risk-based reconfiguration of active electric distribution networks. IET Gener. Transm. Distrib. 2016, 10, 1006–1015. [Google Scholar] [CrossRef]
- Bahramara, S.; Moghaddam, M.P.; Haghifam, M.R. Modelling hierarchical decision making framework for operation of active distribution grids. IET Gener. Transm. Distrib. 2015, 9, 2555–2564. [Google Scholar] [CrossRef]
- Bahramara, S.; Moghaddam, M.P.; Haghifam, M.R. A bi-level optimization model for operation of distribution networks with micro-grids. Int. J. Electr. Power Energy Syst. 2016, 82, 169–178. [Google Scholar] [CrossRef]
- Cai, Y.; Lin, J.; Wan, C.; Song, Y. Stochastic Bi-level Trading Model for an Active Distribution Company with DGs and Interruptible Loads. IET Renew. Power Gener. 2016, 11, 278–288. [Google Scholar] [CrossRef]
- Kardakos, E.G.; Simoglou, C.K.; Bakirtzis, A.G. Optimal offering strategy of a virtual power plant: A stochastic bi-level approach. IEEE Trans. Smart Grid 2016, 7, 794–806. [Google Scholar] [CrossRef]
- Shafie-khah, M.; Siano, P.; Fitiwi, D.Z.; Mahmoudi, N.; Catalão, J.P. An Innovative Two-Level Model for Electric Vehicle Parking Lots in Distribution Systems with Renewable Energy. IEEE Trans. Smart Grid 2017, PP, 1. [Google Scholar] [CrossRef]
- Carrion, M.; Arroyo, J.M.; Conejo, A.J. A bilevel stochastic programming approach for retailer futures market trading. IEEE Trans. Power Syst. 2009, 24, 1446–1456. [Google Scholar] [CrossRef]
- Dempe, S.; Kalashnikov, V.; Pérez-Valdés, G.A.; Kalashnykova, N. Bilevel Programming Problems: Theory, Algorithms and Applications to Energy Networks; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Liu, Z.; Wen, F.; Ledwich, G. Optimal siting and sizing of distributed generators in distribution systems considering uncertainties. IEEE Trans. Power Deliv. 2011, 26, 2541–2551. [Google Scholar] [CrossRef]
- Mazidi, M.; Monsef, H.; Siano, P. Robust day-ahead scheduling of smart distribution networks considering demand response programs. Appl. Energy 2016, 178, 929–942. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wind Unit | ||||||
| Size (kW) | bus | shape index | scale index | cut-in speed (m/s) | nominal speed (m/s) | cut-out speed (m/s) |
| 500 | 16 | 2 | 6.5 | 4 | 14 | 25 |
| PV Unit | ||||||
| Size (kW) | bus | shape index | scale index | rated illumination intensity (w.m2) 1000 | ||
| 500 | 14 | 1.8 | 5.5 | |||
| Mean | Standard Deviation | Min | Max | |
|---|---|---|---|---|
| Initial SOC (%) | 50 | 25 | 30 | 60 |
| Arrival Time (h) | 8 | 3 | 7 | 10 |
| Departure Time (h) | 20 | 3 | 18 | 24 |
| charge efficiency | 90% | battery capacity (kWh) | 50 | SOCmin (kWh) | 7.5 |
| discharge efficiency | 95% | charging/discharging rate (kW-h) | 10 | SOCmax (kWh) | 45 |
| SOCdep (kWh) | 45 | Ccd ($/MWh) | 30 | PL bus | 11 |
| On-Peak | Mid-Peak | Off-Peak | |
|---|---|---|---|
| On-peak (14–20) | −0.1 | 0.016 | 0.012 |
| Mid-peak (8–13 and 21–22) | 0.016 | −0.1 | 0.01 |
| Off-peak (1–7 and 23–24) | 0.012 | 0.01 | −0.1 |
| Program | Electricity Price for Load, Charging/Discharging of EVs ($/MWh) | Incentive Value ($/MWh) | Penalty Value ($/MWh) |
|---|---|---|---|
| Base case | 131.292 flat rate | 0 | 0 |
| TOU | 65.646, 131.292, 262.584 at off-peak, mid-peak and on-peak respectively | 0 | 0 |
| CAP | 131.292 flat rate | 100 | 50 |
| TOU + CAP | 65.646, 131.292, 262.584 at off-peak, mid-peak and on-peak respectively | 100 | 50 |
| Program | Profit of SDISCO with β = 0 | Profit of SDISCO with β = 1 |
|---|---|---|
| Base case (flat) | 1723.773 | 1628.860 |
| TOU | 2272.869 | 2152.032 |
| CAP | 1262.504 | 1142.833 |
| TOU + CAP | 1668.412 | 1501.835 |
| β | 0 | 1 |
|---|---|---|
| Selling of energy to EV owners ($) | 1821.981 | 1662.296 |
| Selling of energy to load ($) | 8500.808 | 8500.808 |
| Providing power from wholesale market ($) | 7285.033 | 7454.307 |
| Energy purchased from EV owners for supplying load ($) | 764.887 | 556.7639 |
| Implementation of PBDR and IBDR programs ($) | 0 | 0 |
| Expected value (profit) ($) | 2272.869 | 2152.032 |
| Time | Losses | Time | Losses | Time | Losses | Time | Losses | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| β = 0 | β = 1 | β = 0 | β = 1 | β = 0 | β = 1 | β = 0 | β = 1 | ||||
| 1 | 40.94 | 66.46 | 7 | 93.09 | 129.90 | 13 | 56.87 | 66.94 | 19 | 44.01 | 47.78 |
| 2 | 38.40 | 60.21 | 8 | 52.40 | 89.16 | 14 | 44.81 | 49.51 | 20 | 41.56 | 48.03 |
| 3 | 38.51 | 56.19 | 9 | 404.37 | 361.47 | 15 | 43.11 | 47.22 | 21 | 173.24 | 151.43 |
| 4 | 36.23 | 60.32 | 10 | 490.78 | 448.26 | 16 | 55.32 | 52.21 | 22 | 123.86 | 131.08 |
| 5 | 36.68 | 50.21 | 11 | 115.46 | 126.61 | 17 | 79.36 | 64.51 | 23 | 70.43 | 84.27 |
| 6 | 37.43 | 57.37 | 12 | 56.75 | 73.53 | 18 | 42.17 | 44.75 | 24 | 72.69 | 100.03 |
| β | 0 | 0.1 | 0.3 | 0.5 | 0.7 | 0.9 | 1 |
|---|---|---|---|---|---|---|---|
| Expected value (Profit) ($) | 2272.869 | 2260.782 | 2236.643 | 2189.526 | 2188.258 | 2163.444 | 2152.032 |
| CVaR ($) | - | 2147.061 | 2148.751 | 2130.190 | 2150.147 | 2151.239 | 2152.032 |
| Solution time (s) | 358.109 | 376.469 | 386.375 | 372.937 | 585.828 | 601.640 | 1670.344 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bagher Sadati, S.M.; Moshtagh, J.; Shafie-khah, M.; Catalão, J.P.S. Risk-Based Bi-Level Model for Simultaneous Profit Maximization of a Smart Distribution Company and Electric Vehicle Parking Lot Owner. Energies 2017, 10, 1714. https://doi.org/10.3390/en10111714
Bagher Sadati SM, Moshtagh J, Shafie-khah M, Catalão JPS. Risk-Based Bi-Level Model for Simultaneous Profit Maximization of a Smart Distribution Company and Electric Vehicle Parking Lot Owner. Energies. 2017; 10(11):1714. https://doi.org/10.3390/en10111714
Chicago/Turabian StyleBagher Sadati, S. Muhammad, Jamal Moshtagh, Miadreza Shafie-khah, and João P. S. Catalão. 2017. "Risk-Based Bi-Level Model for Simultaneous Profit Maximization of a Smart Distribution Company and Electric Vehicle Parking Lot Owner" Energies 10, no. 11: 1714. https://doi.org/10.3390/en10111714
APA StyleBagher Sadati, S. M., Moshtagh, J., Shafie-khah, M., & Catalão, J. P. S. (2017). Risk-Based Bi-Level Model for Simultaneous Profit Maximization of a Smart Distribution Company and Electric Vehicle Parking Lot Owner. Energies, 10(11), 1714. https://doi.org/10.3390/en10111714