
Distributed Control Strategy for Autonomous Operation of Hybrid AC/DC Microgrid

Abstract
:1. Introduction
2. Configuration and Control Strategy of a Hybrid AC/DC Microgrid
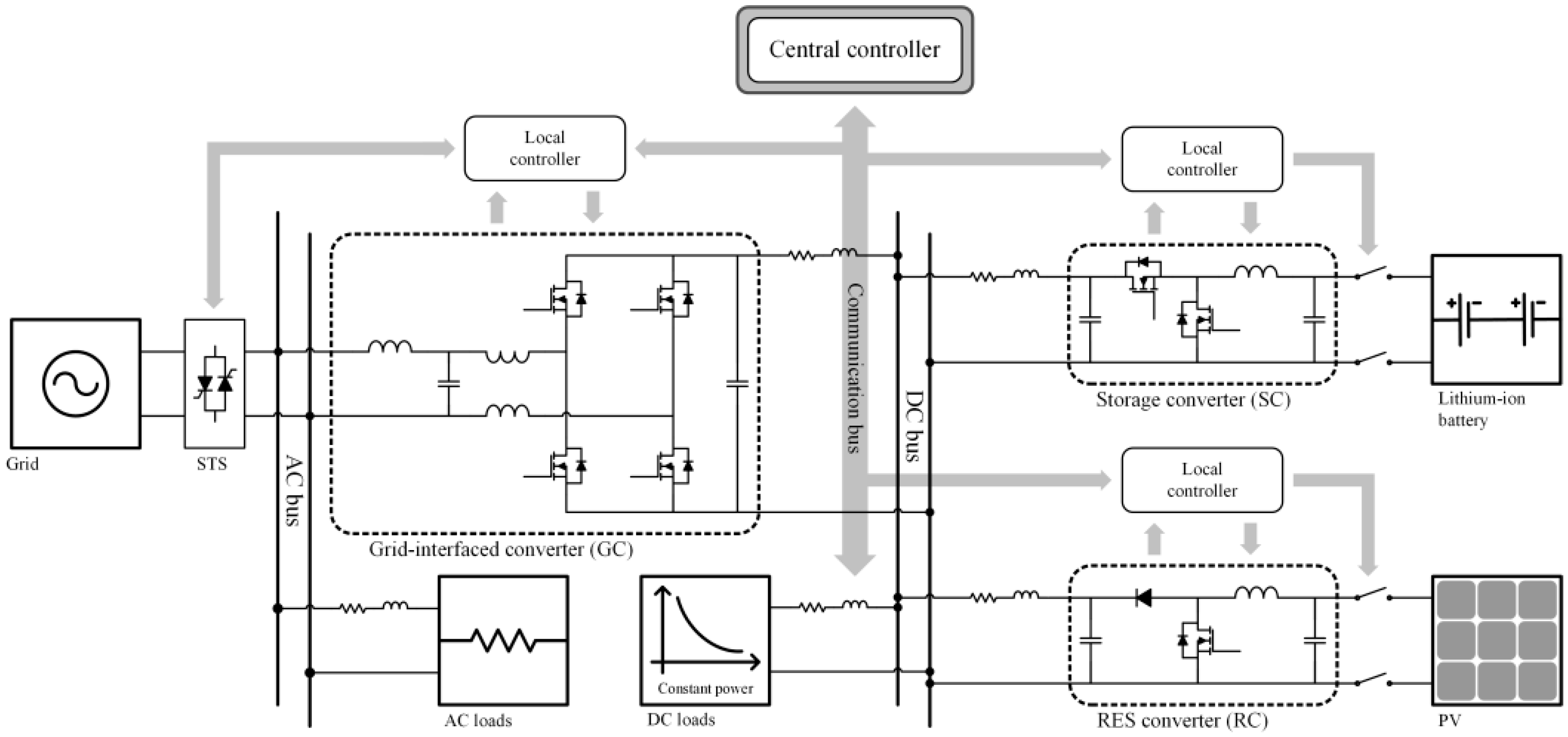
2.1. System Description
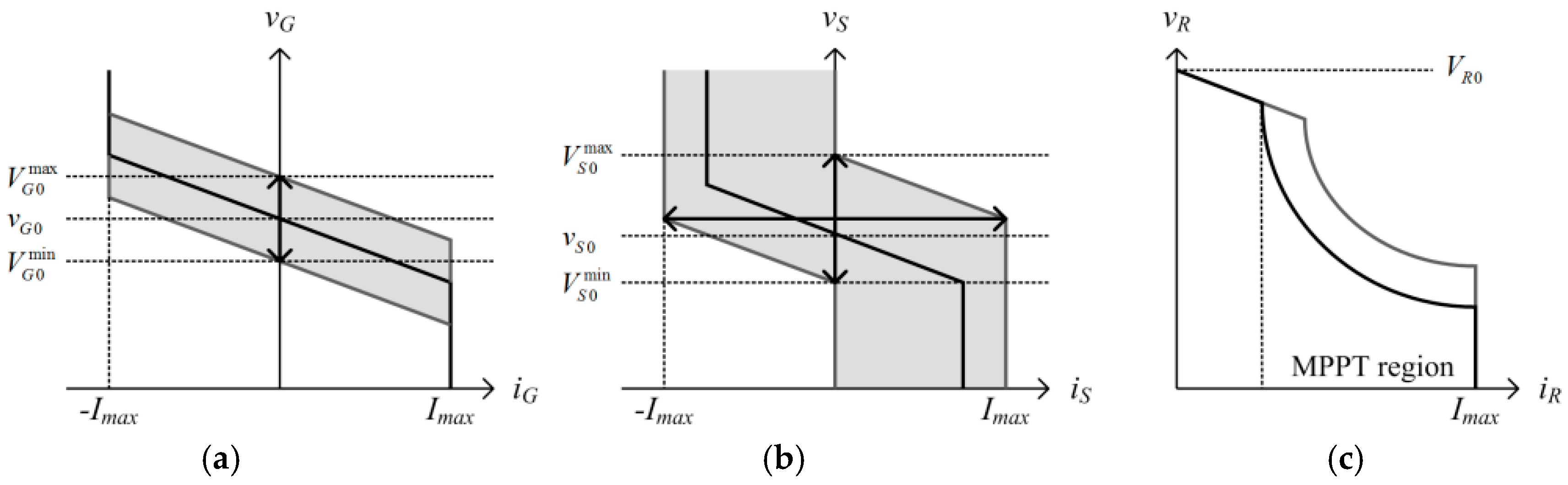
2.2. Control Strategy
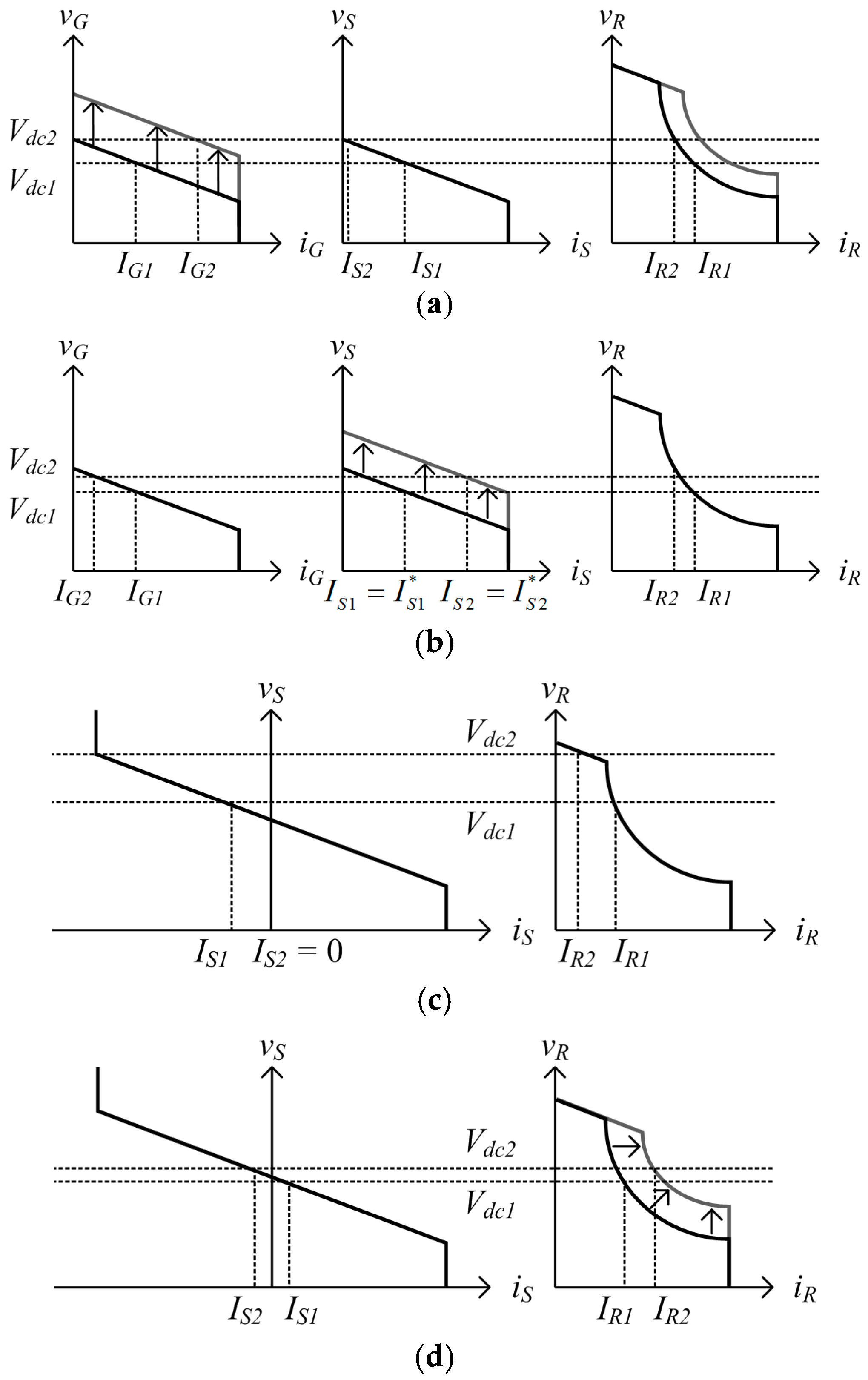
2.3. Operation Description
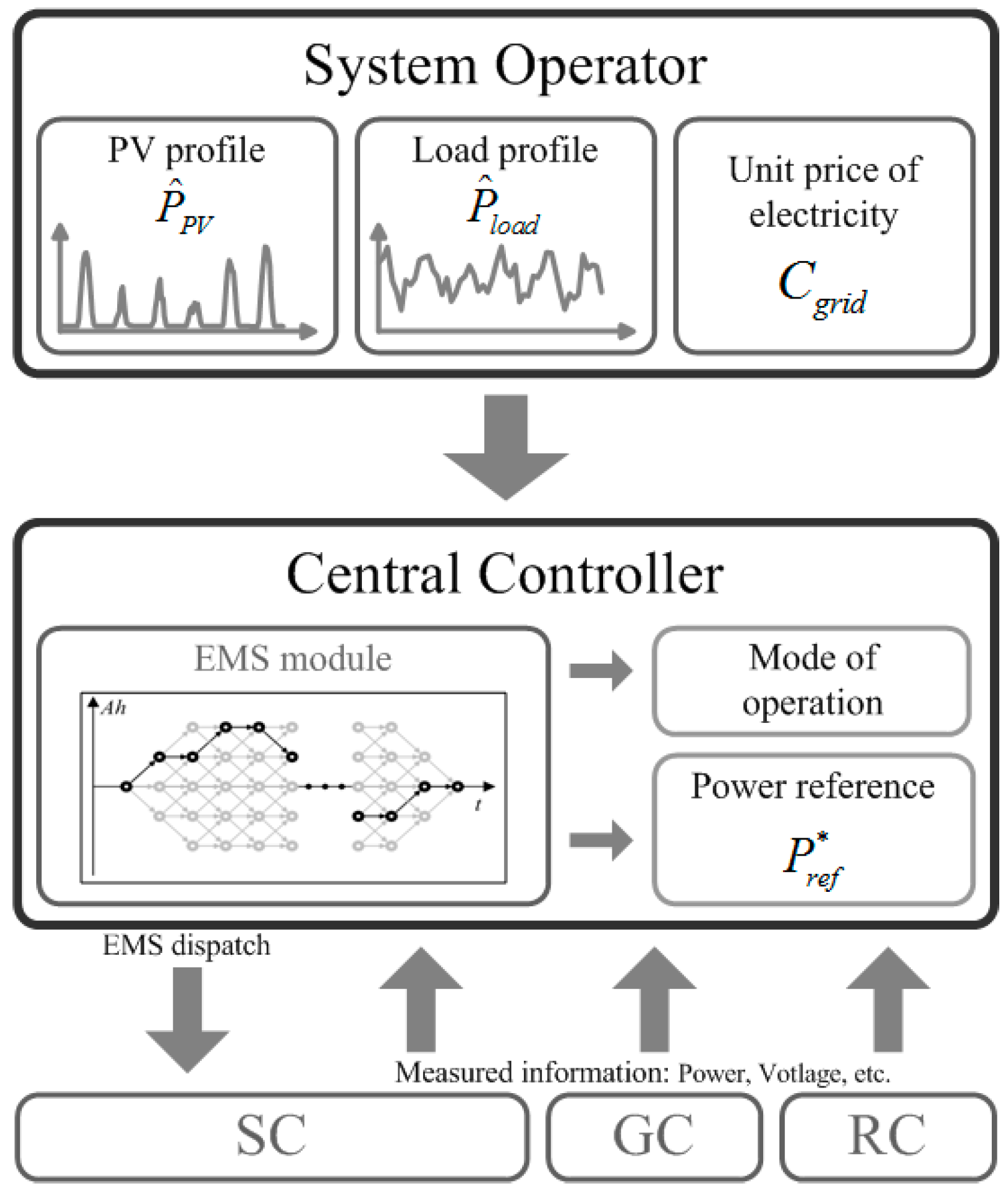
3. Control Design: Central Controller
3.1. EMS Optimization
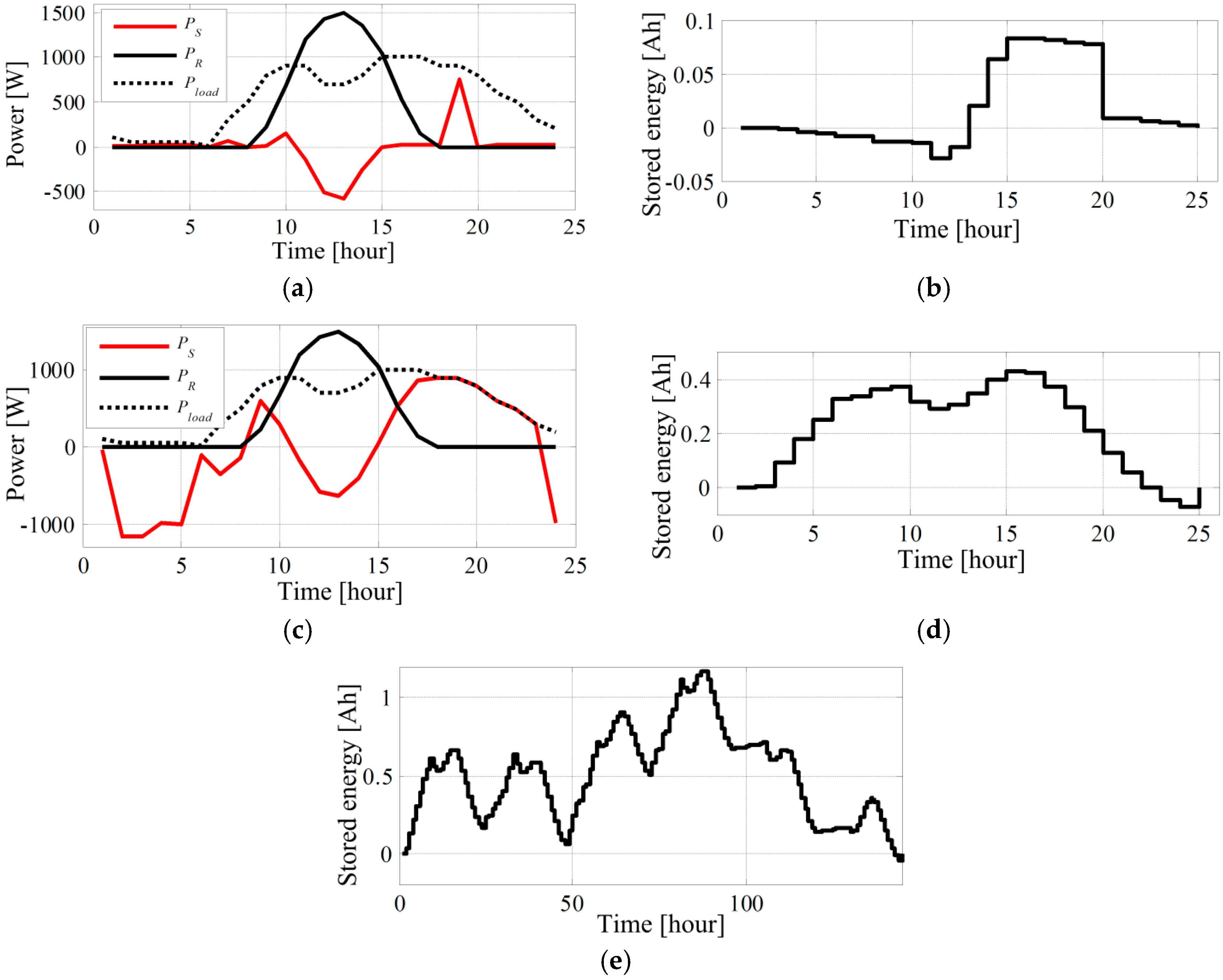
3.2. Energy Scheduling Results
4. Control Design: Local Controllers
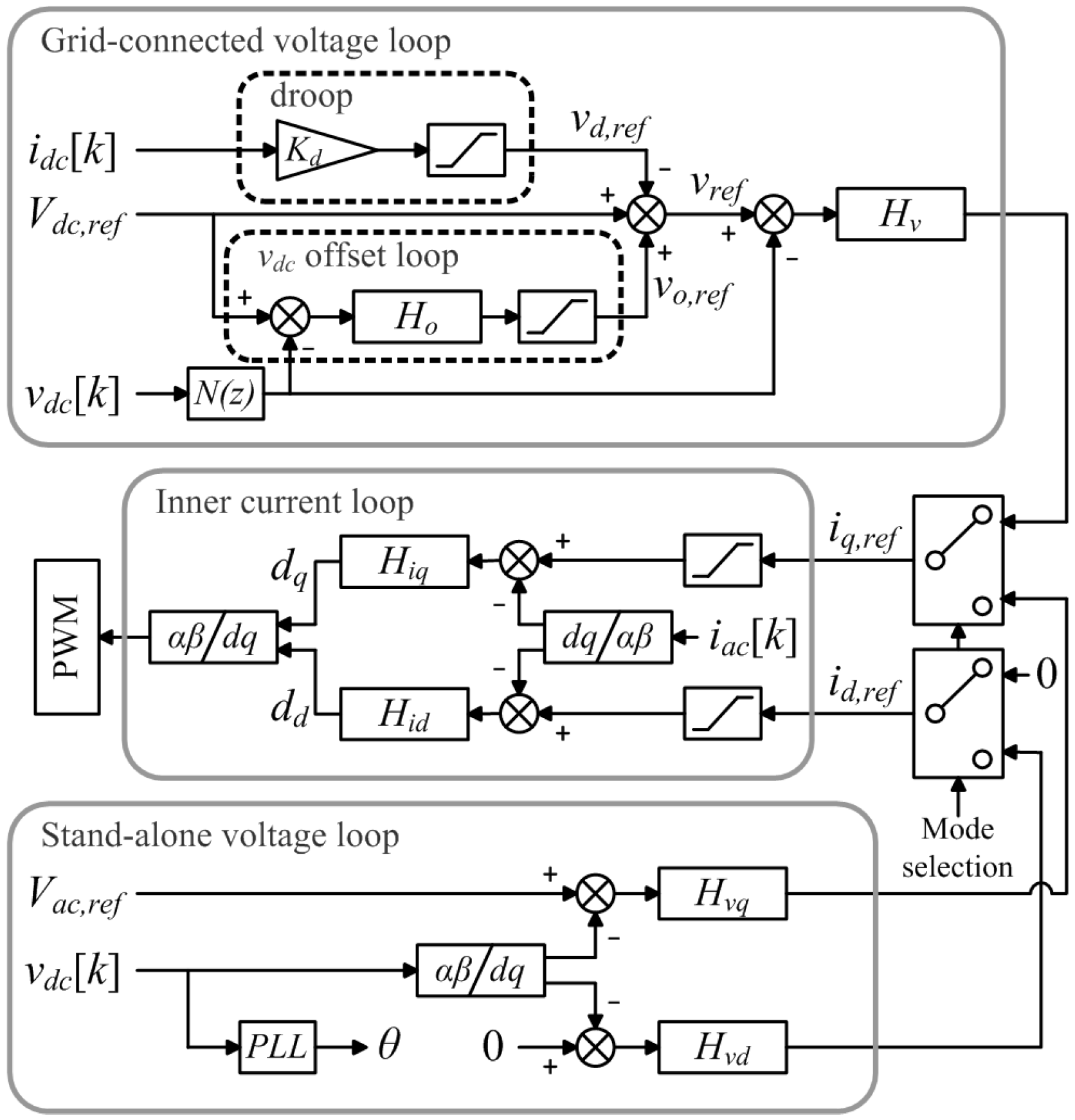
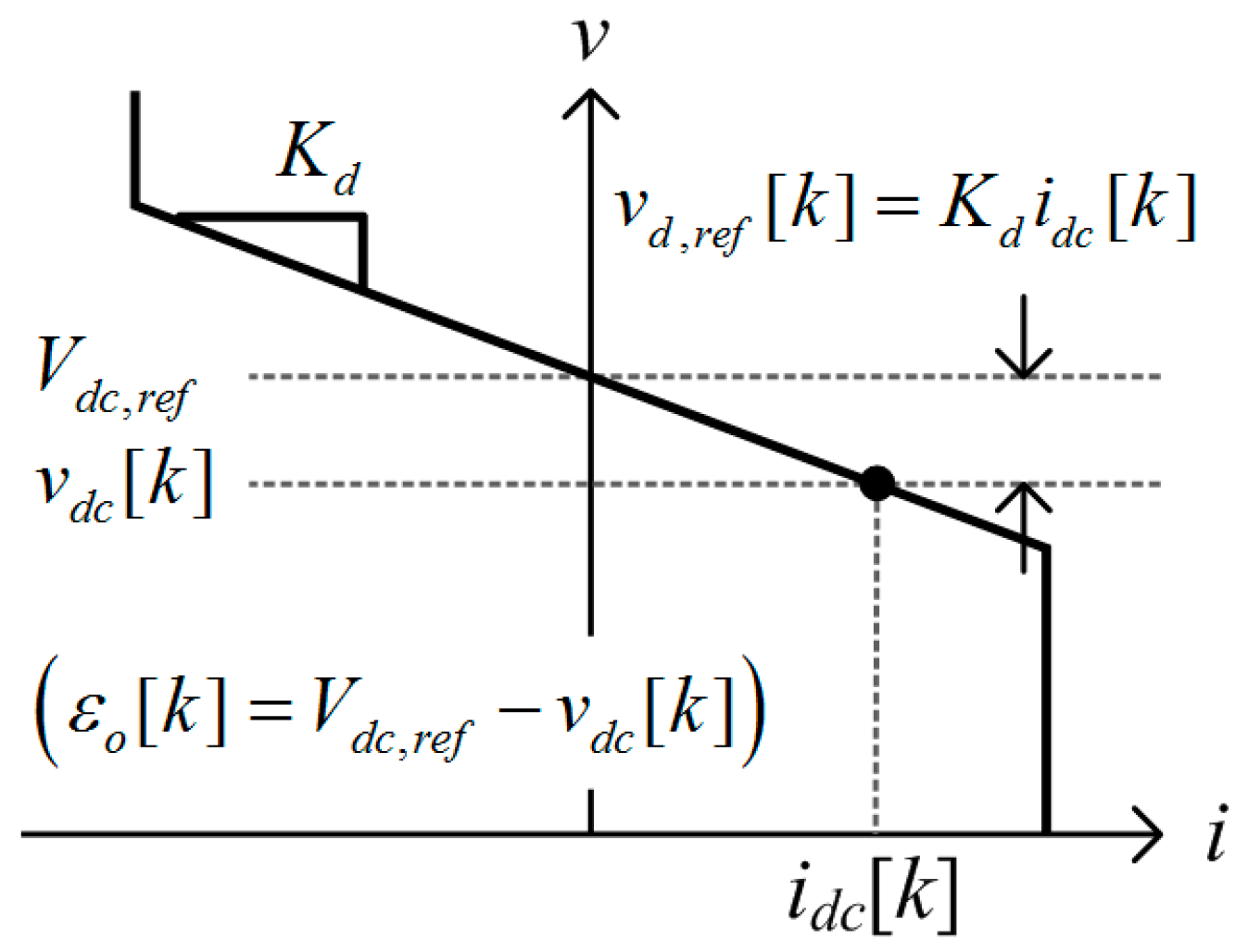
4.1. GC Local Controller
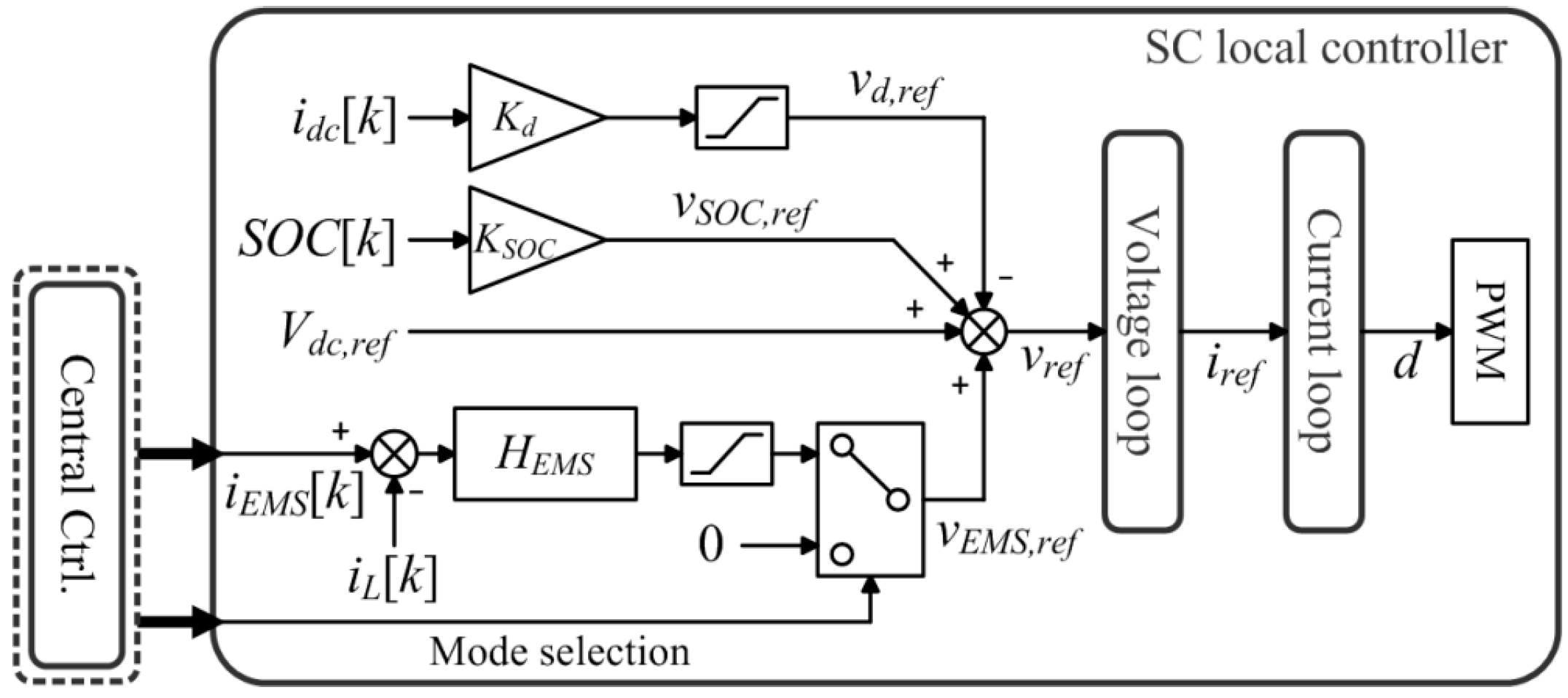
4.2. SC Local Controller
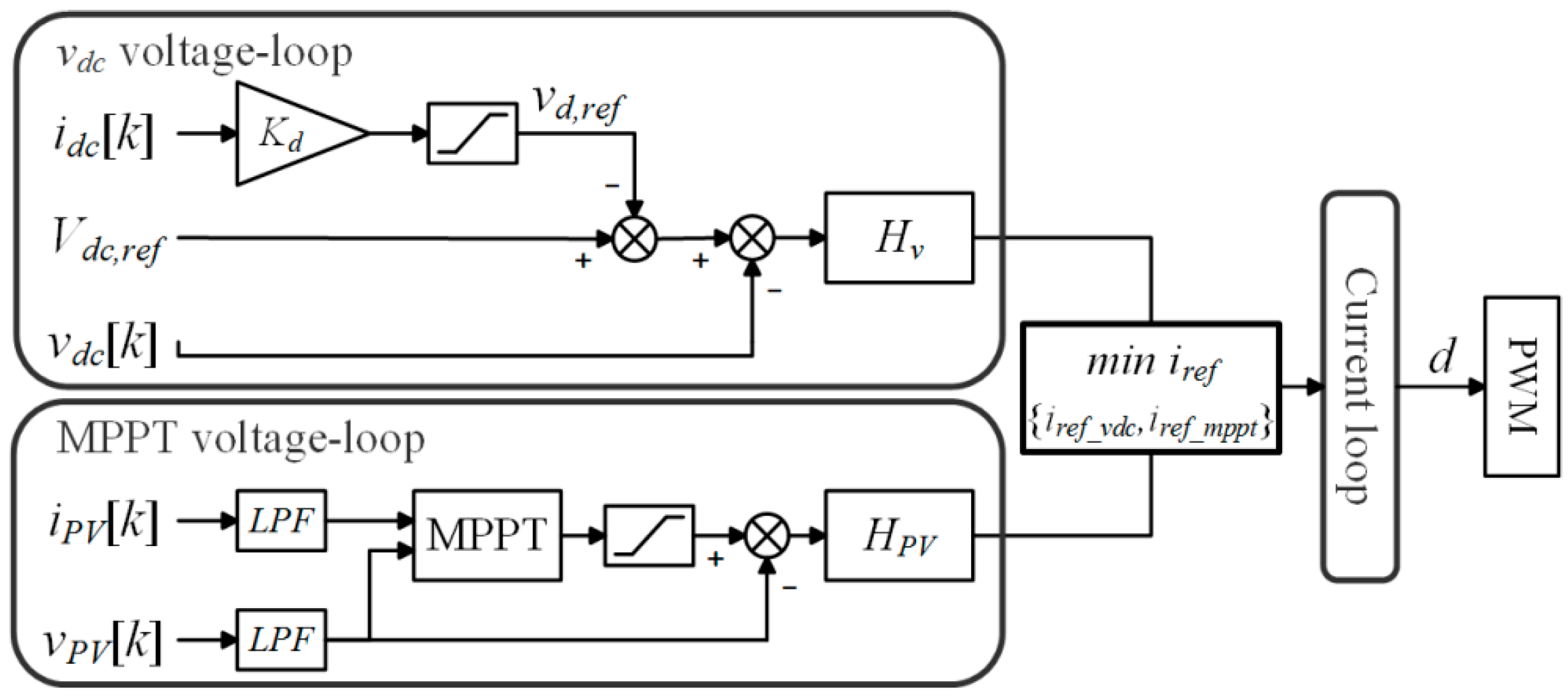
4.3. RC Local Controller
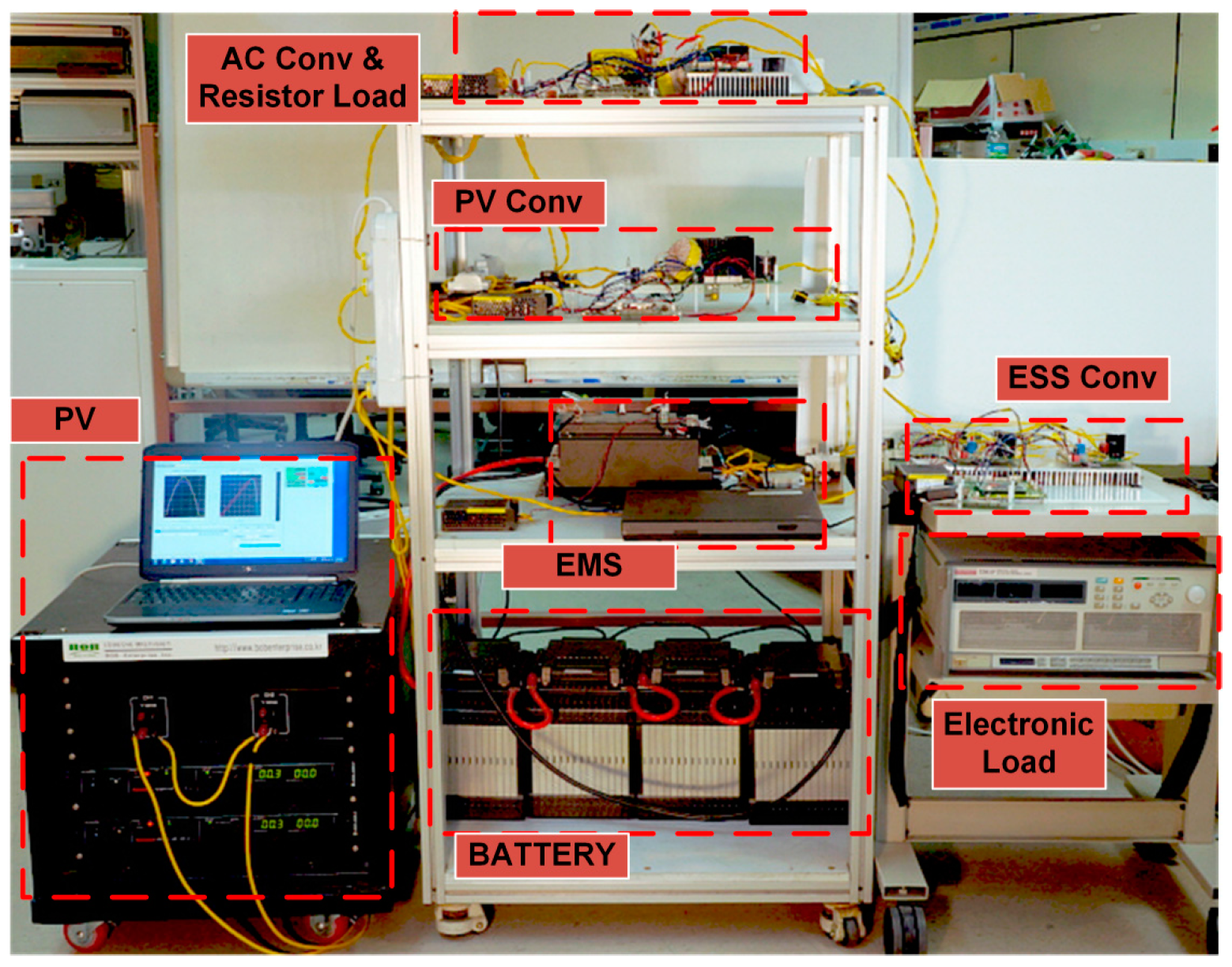
5. Experimental Results
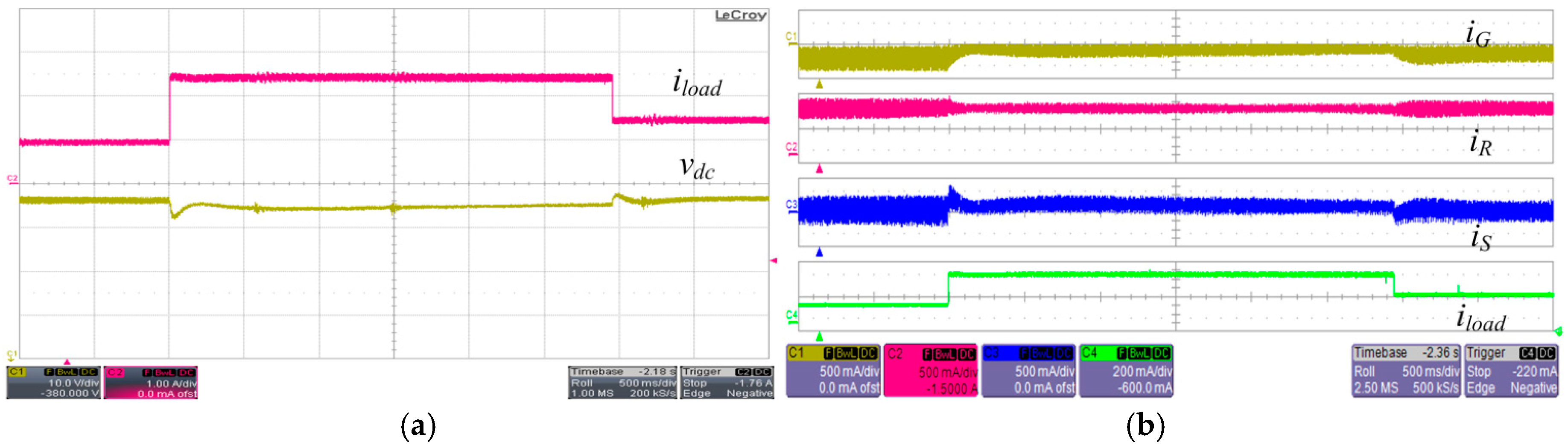
5.1. Single-Mode Operation
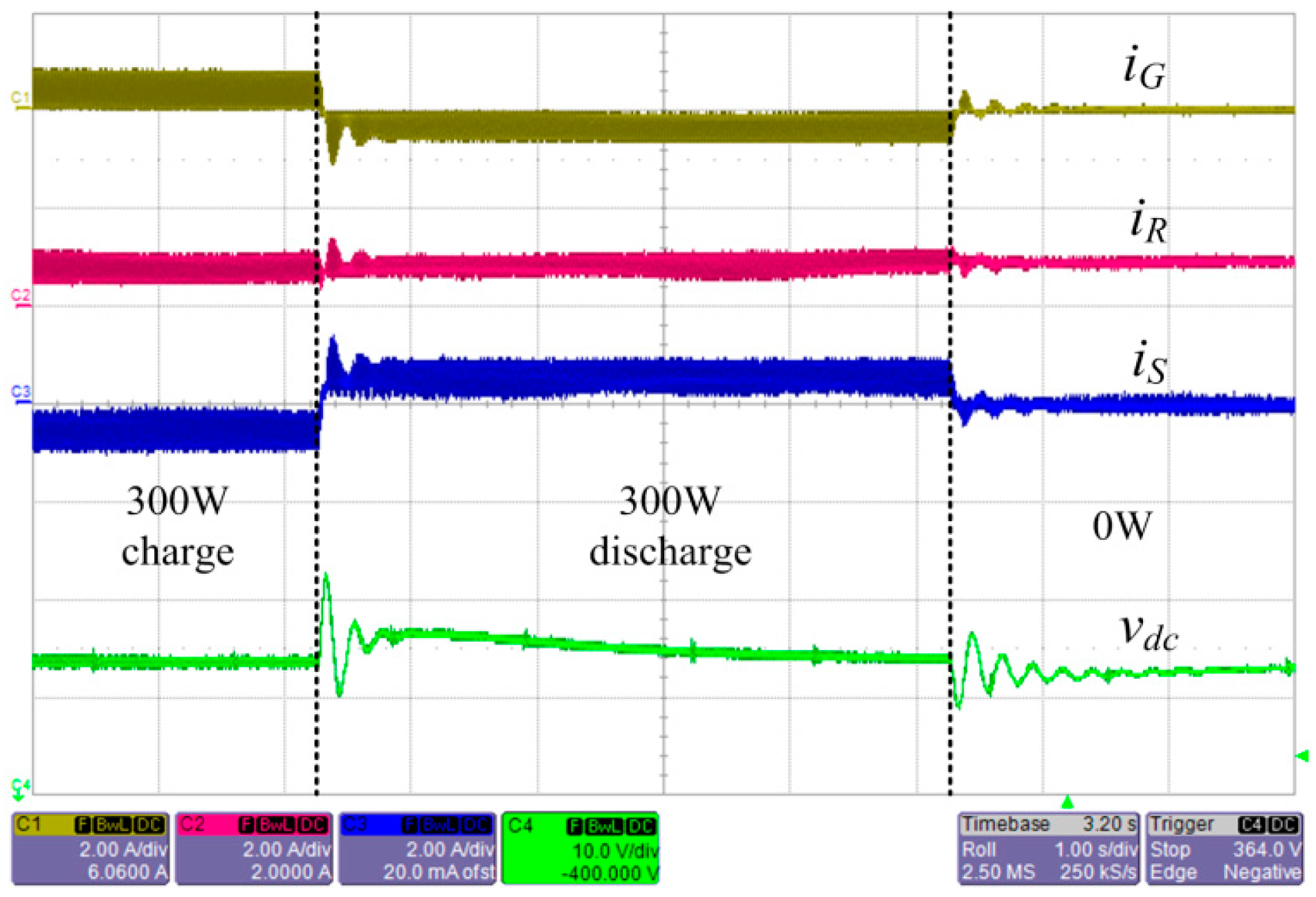
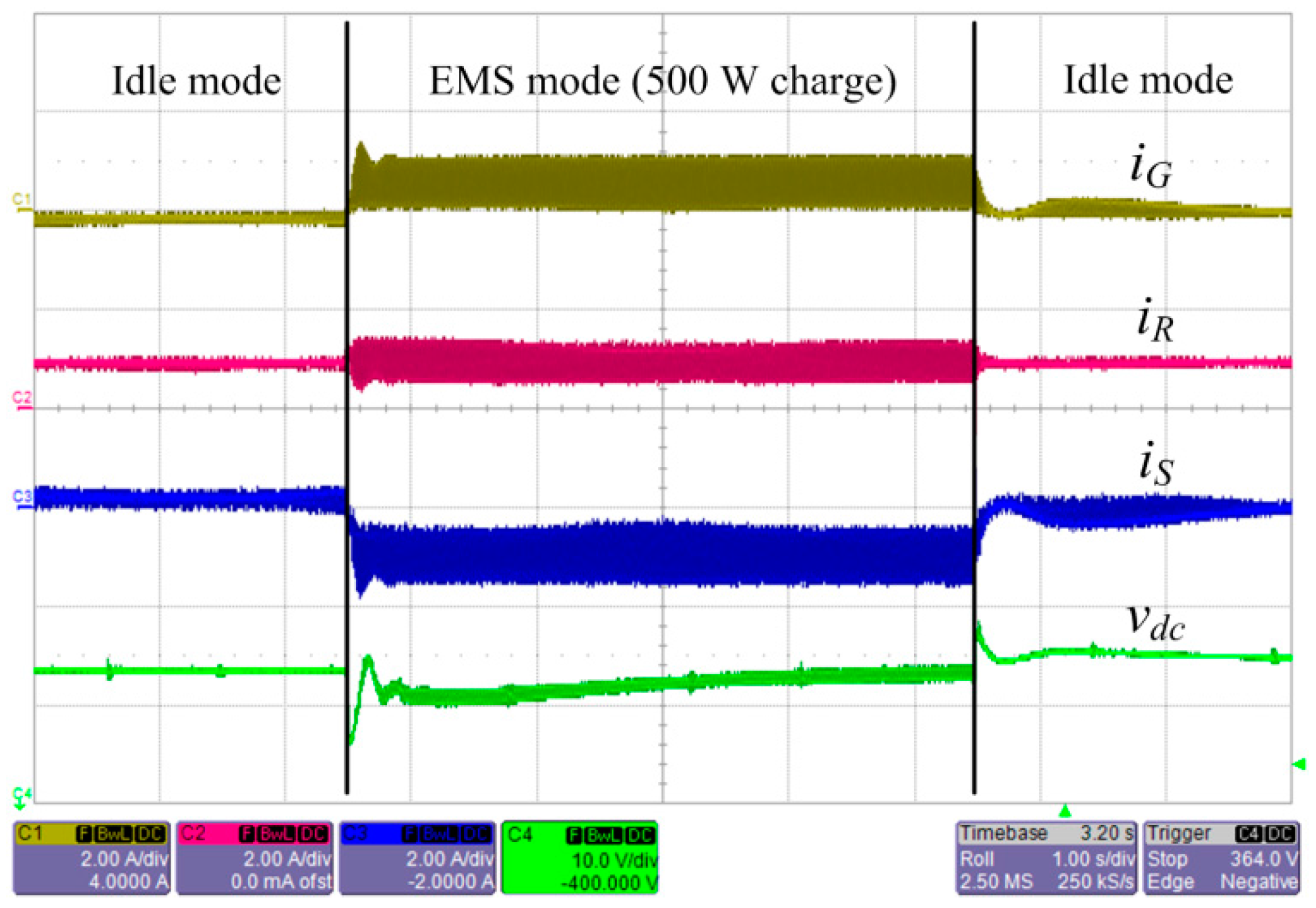
5.2. EMS Dispatch
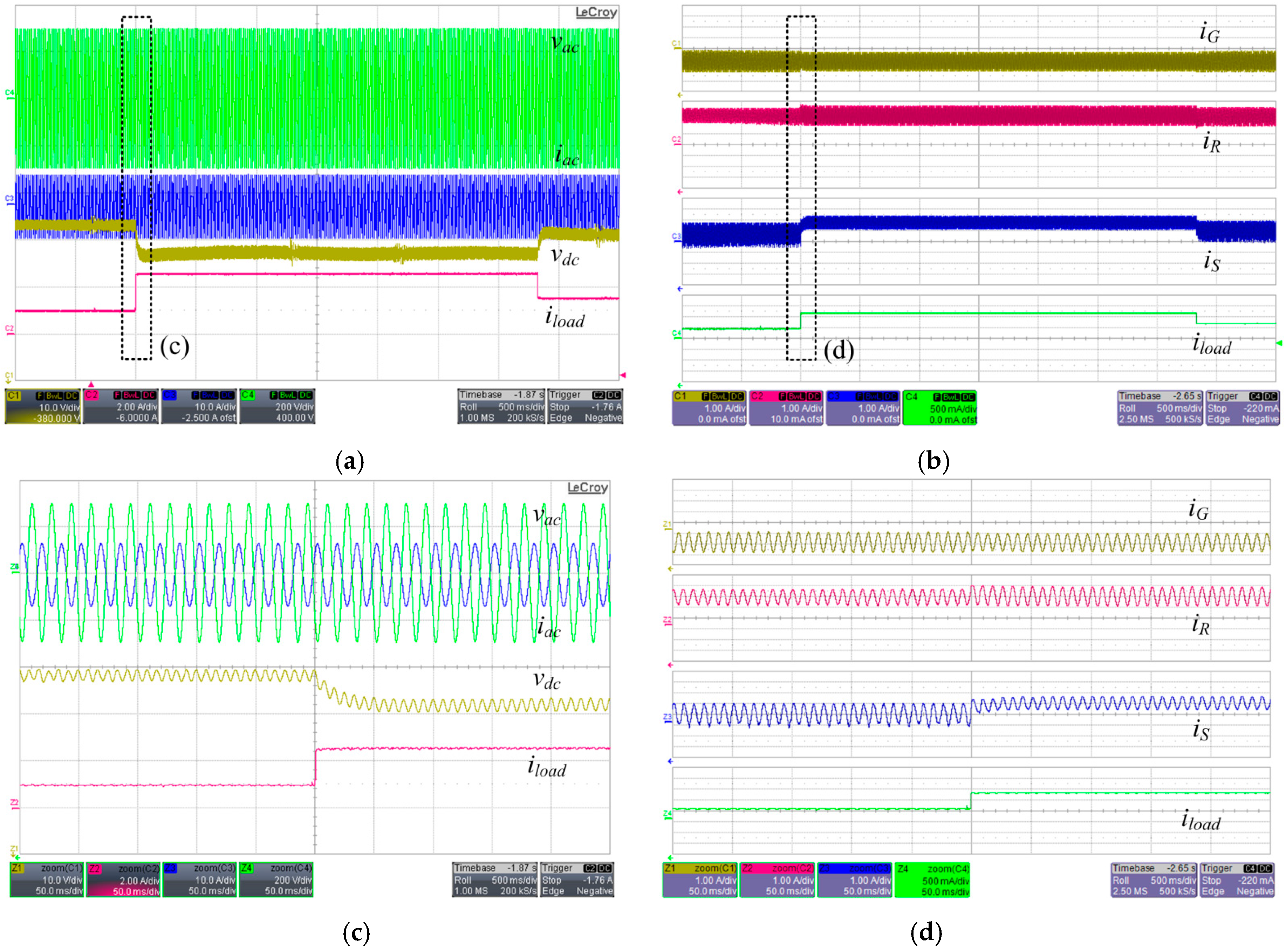
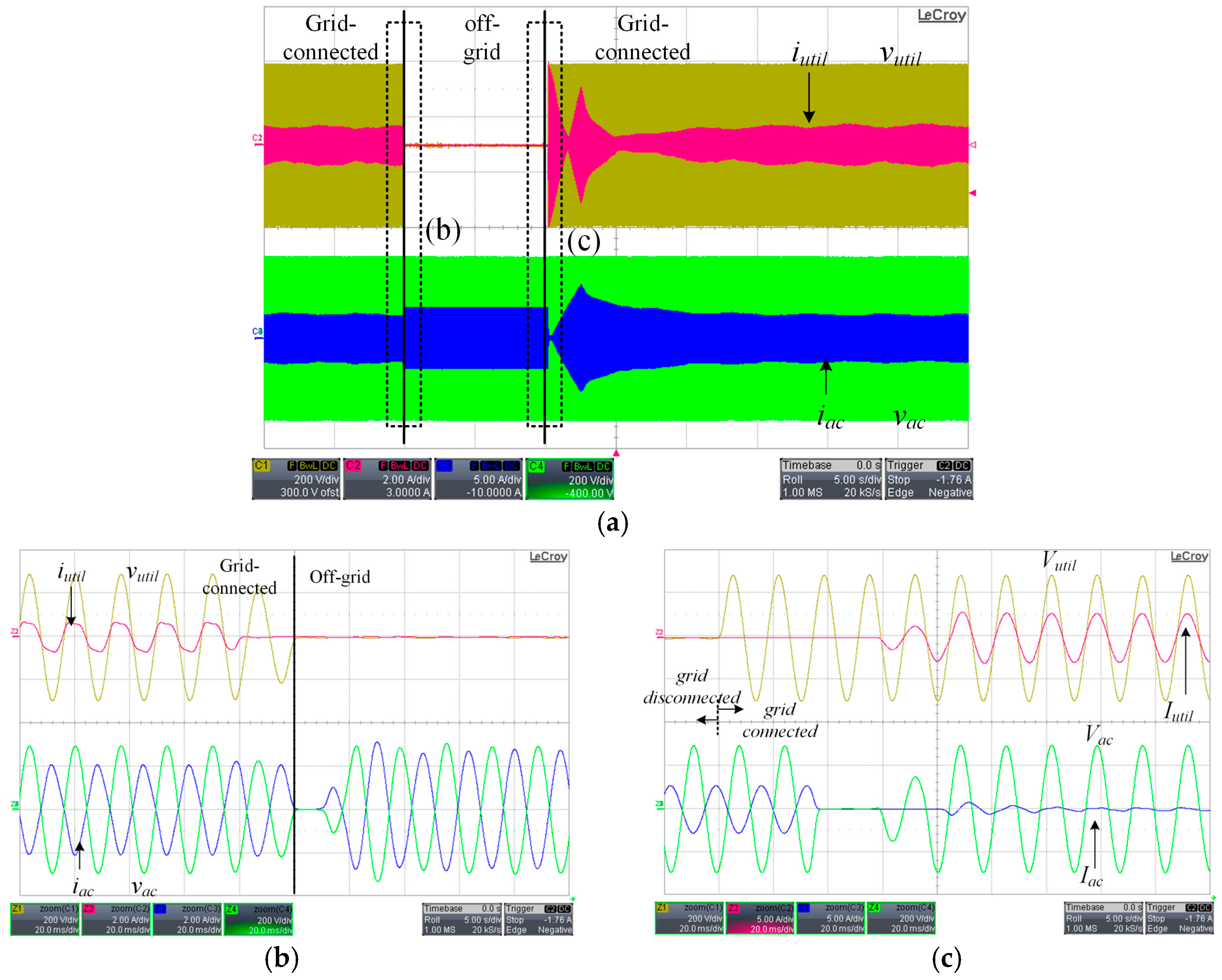
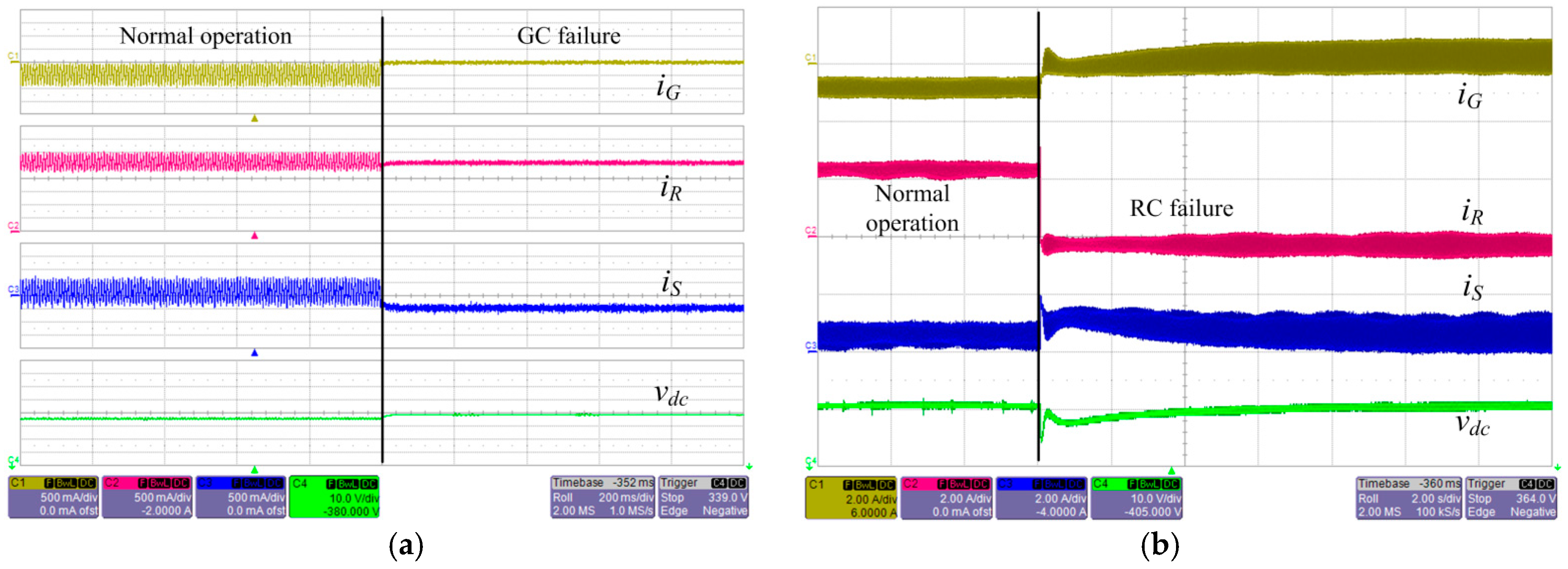
5.3. Mode Transitions
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yan, Y.; Qian, Y.; Sharif, H.; Tipper, D. A survey on smart grid communication infrastructures: Motivations, requirements and challenges. IEEE Commun. Surv. Tutor. 2013, 15, 5–20. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Yang, P.; Zeng, Z.; Peng, J.; Zhao, Z. Black start strategy for PV-ESS multi-microgrids with three-phase/single-phase architecture. Energies 2016, 9, 372. [Google Scholar] [CrossRef]
- Carrasco, J.M.; Franquelo, L.G.; Bialasiewicz, J.T.; Galván, E.; PortilloGuisado, R.C.; Prats, M.M.; León, J.I.; Moreno-Alfonso, N. Power-electronic systems for the grid integration of renewable energy sources: A survey. IEEE Trans. Ind. Electron. 2006, 53, 1002–1016. [Google Scholar] [CrossRef]
- Lasseter, R. Smart distribution: Coupled microgrids. Proc. IEEE 2011, 99, 1074–1082. [Google Scholar] [CrossRef]
- Arefifar, S.A.; Mohamed, Y.A.R.I. DG Mix, Reactive sources and energy storage units for optimizing microgrid reliability and supply security. IEEE Trans. Smart Grid 2014, 5, 1835–1844. [Google Scholar] [CrossRef]
- Loh, P.C.; Li, D.; Chai, Y.K.; Blaabjerg, F. Autonomous operation of hybrid microgrid with AC and DC subgrids. IEEE Trans. Power Electron. 2013, 28, 2214–2223. [Google Scholar] [CrossRef]
- Cho, B.H.; Choi, W.; Baek, J.B. Control of the dc distribution microgrid system. In Proceedings of the IEEE International Power Electronics Conference (IPEC), Hiroshima, Japan, 13–21 May 2014.
- Solanki, A.; Nasiri, A.; Bhavaraju, V.; Familiant, Y.L.; Fu, Q. A new framework for microgrid management: Virtual droop control. IEEE Trans. Smart Grid 2016, 7, 554–566. [Google Scholar] [CrossRef]
- Tan, K.T.; So, P.L.; Chu, Y.C.; Chen, M.Z.Q. A flexible AC distribution system device for a microgrid. IEEE Trans. Energy Convers. 2013, 28, 601–610. [Google Scholar] [CrossRef]
- Justo, J.J.; Mwasilu, F.; Ju, L.; Jung, J.W. AC-microgrids versus DC-microgrids with distributed energy resources: A review. Renew. Sustain. Energy Rev. 2013, 24, 387–405. [Google Scholar] [CrossRef]
- Yuan, C.; Haj-Ahmed, M.A.; Mahesh, S.I. Protection strategies for medium-voltage direct-current microgrid at a remote area mine site. IEEE Trans. Ind. Appl. 2015, 51, 2846–2853. [Google Scholar] [CrossRef]
- Bui, D.M.; Chen, S.L.; Wu, C.H.; Lien, K.Y.; Huang, C.H.; Jen, K.K. Review on protection coordination strategies and development of an effective protection coordination system for DC microgrid. In Proceedings of the 2014 IEEE Asia-Pacific Power and Energy Engineering Conference (APPEEC), Hong Kong, China, 7–10 December 2014; pp. 1–10.
- Wang, C.; Yang, X.; Wu, Z.; Che, Y.; Guo, L.; Zhang, S.; Liu, Y. A Highly integrated and reconfigurable microgrid testbed with hybrid distributed energy sources. IEEE Trans. Smart Grid 2016, 7, 451–459. [Google Scholar] [CrossRef]
- Hong, M.; Yu, X.; Yu, N.P.; Loparo, K.A. An energy scheduling algorithm supporting power quality management in commercial building microgrids. IEEE Trans. Smart Grid 2016, 7, 1044–1056. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhuo, F.; Wang, F.; Liu, B.; Gou, R.; Zhao, Y. A virtual impedance optimization method for reactive power sharing in networked microgrid. IEEE Trans. Power Electron. 2016, 31, 2890–2904. [Google Scholar] [CrossRef]
- Vidyanandan, K.V.; Senroy, N. Frequency regulation in microgrid using wind—Fuel cell—Diesel generator. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting (PESGM), San Diego, CA, USA, 22–26 July 2012; pp. 1–8.
- He, M.; Giesselmann, M. Reliability-constrained self-organization and energy management towards a resilient microgrid cluster. In Proceedings of the IEEE Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 18–20 February 2015; pp. 1–5.
- Guerrero, J.M.; Chandorkar, M.; Lee, T.L.; Loh, P.C. Advanced control architectures for intelligent microgrids—Part I: Decentralized and hierarchical control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef]
- Karlsson, P.; Svensson, J. DC bus voltage control for a distributed power system. IEEE Trans. Power Electron. 2003, 18, 1405–1412. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodri, X.; Guez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; Vicuña, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Choi, W.; Baek, J.B.; Cho, B.H. Control design of coordinated droop control for hybrid AC/DC microgrid considering distributed generation characteristics. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 4276–4281.
- Farhadi, M.; Mohammed, O. Adaptive energy management in redundant hybrid DC microgrid for pulse load mitigation. IEEE Trans. Smart Grid 2015, 6, 54–62. [Google Scholar] [CrossRef]
- Dragičević, T.; Guerrero, J.M.; Vasquez, J.C.; Škrlec, D. Supervisory control of an adaptive-droop regulated DC microgrid with battery management capability. IEEE Trans. Power Electron. 2014, 29, 695–706. [Google Scholar] [CrossRef]
- Aymen, C.; Rashad, M.K.; Ridha, A.; Ken, N. Multiobjective intelligent energy management for a microgrid. IEEE Trans. Ind. Electron. 2013, 60, 1688–1699. [Google Scholar]
- Li, F.; Xie, K.; Yang, J. Optimization and analysis of a hybrid energy storage system in a small-scale standalone microgrid for remote area power supply (RAPS). Energies 2015, 8, 4802–4826. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Grid-Interfaced Converter (GC) | Storage Converter (SC) | RES Converter (RC) |
|---|---|---|---|
| 1 | Grid-connected: Vdc | Idle: Vdc | MPPT: PPV |
| 2 | Off-grid: Vac | EMS: PESS | Off-MPPT: Vdc |
| 3 | Fail | Fail | Fail |
| Target | Transmit | Receive |
|---|---|---|
| GC | Protection | Measurements, Vdc restoration |
| SC | Protection, EMS, Mode selection | Measurements, SOC, Vocv |
| RC | Protection | Measurements |
| Component | Rating |
|---|---|
| AC source | Grid simulator 1 kVA |
| PV source | OCV 150 V/SCC 14 A/MPP 1800 W |
| Battery | 4.2–2.7 V/31 Ah/Li-polymer cell/56S1P |
| Grid converter | 1 kW/18 kHz |
| Storage converter | 2 kW/50 kHz |
| RES converter | 2 kW/50 kHz |
| DC load | Electric load/1 kW |
| AC load | Resistive load/108 Ω |
| Central controller | Matlab/Simulink |
| Local controller | Texas Instruments TMS320F28335 (Dallas, TX, USA) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baek, J.; Choi, W.; Chae, S. Distributed Control Strategy for Autonomous Operation of Hybrid AC/DC Microgrid. Energies 2017, 10, 373. https://doi.org/10.3390/en10030373
Baek J, Choi W, Chae S. Distributed Control Strategy for Autonomous Operation of Hybrid AC/DC Microgrid. Energies. 2017; 10(3):373. https://doi.org/10.3390/en10030373
Chicago/Turabian StyleBaek, Jongbok, Wooin Choi, and Suyong Chae. 2017. "Distributed Control Strategy for Autonomous Operation of Hybrid AC/DC Microgrid" Energies 10, no. 3: 373. https://doi.org/10.3390/en10030373
APA StyleBaek, J., Choi, W., & Chae, S. (2017). Distributed Control Strategy for Autonomous Operation of Hybrid AC/DC Microgrid. Energies, 10(3), 373. https://doi.org/10.3390/en10030373