3.1. Structure of the Novel Power System Stabilizer
According to the theoretical analysis in
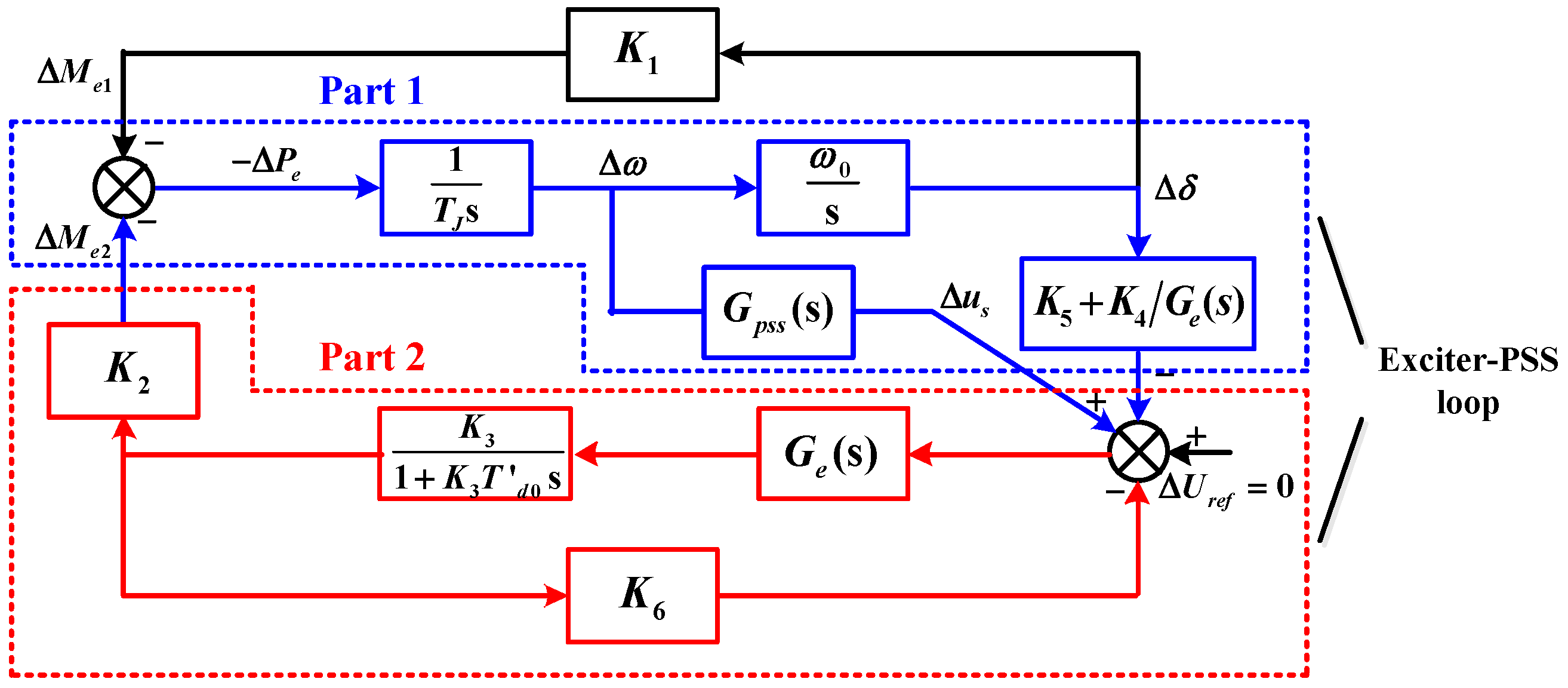
Section 2, it is known that characteristic of exciter mode is determined by the frequency characteristics of exciter-PSS loop. This loop is formed by part 1 and part 2 in
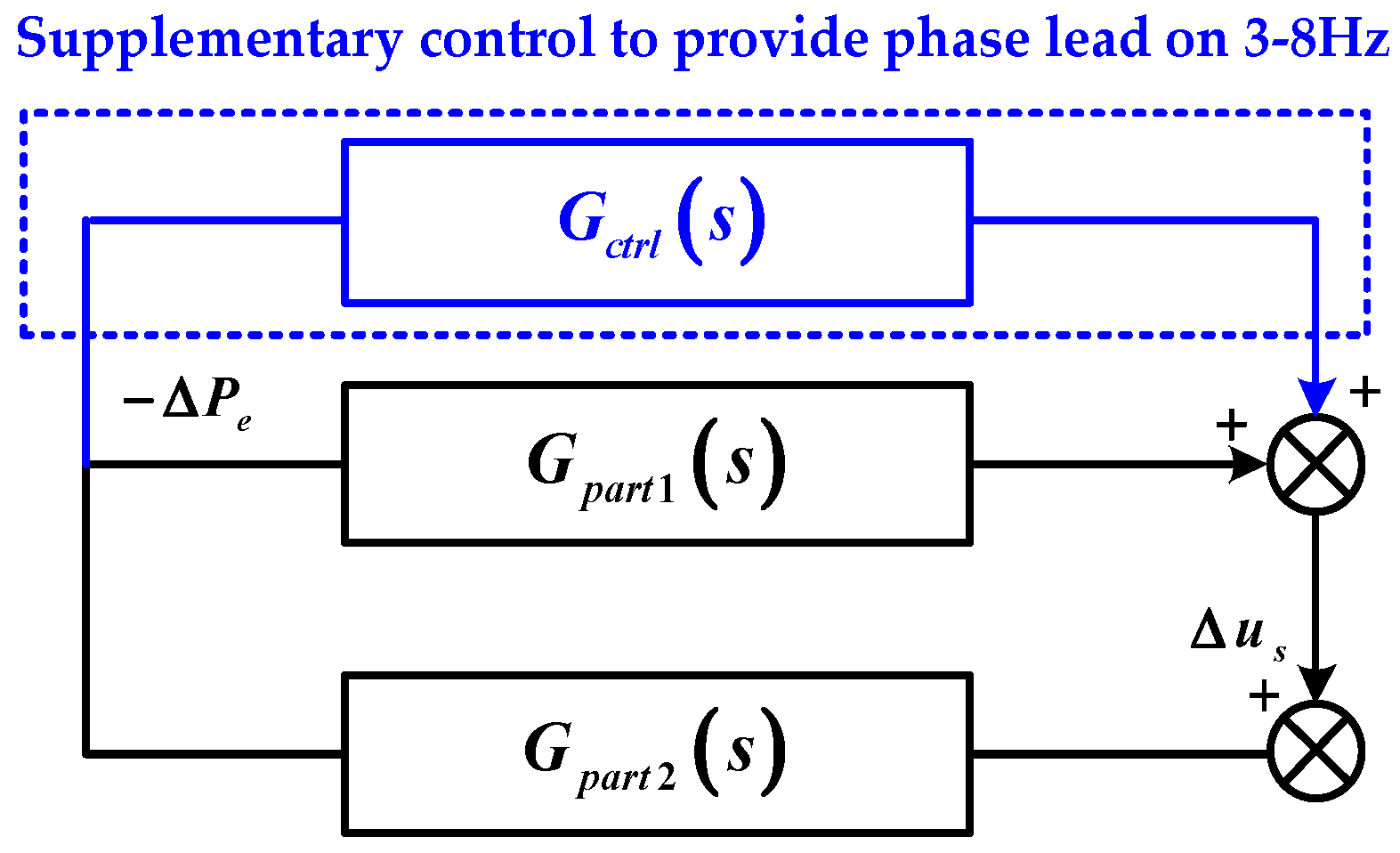
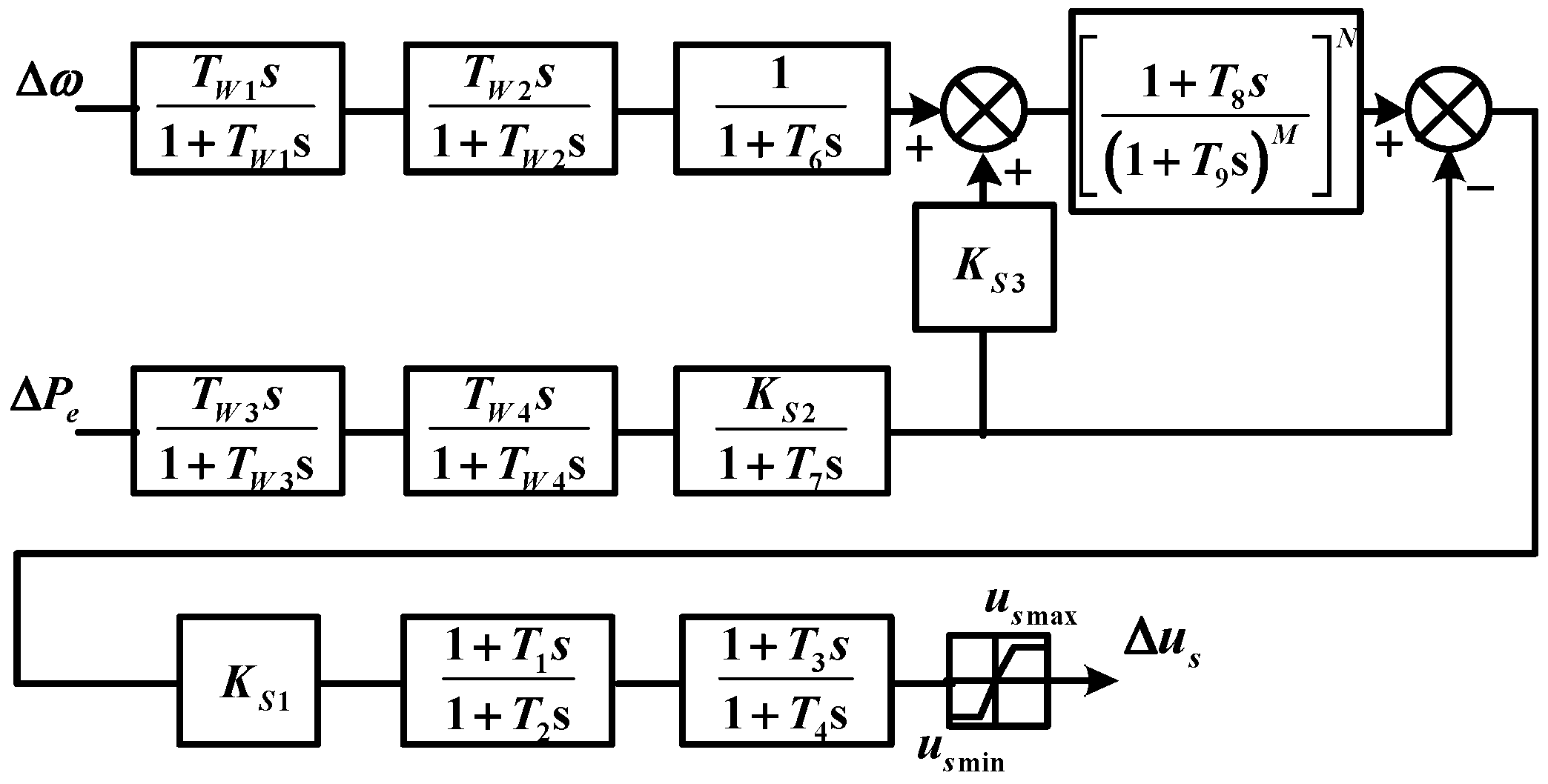
Figure 1. To improve the damping of exciter mode oscillation, the phase-frequency characteristics of the exciter-PSS loop on high frequencies should be improved. Considering output of part 2 is generator active power, it is hard to put a supplementary control parallel with part 2. But output of part 1 is that of PSS, it directly goes into excitation system. Thus, it is convenient to add a supplementary control on part 1. The diagram of the proposed control is shown in
Figure 3.
The input of the supplementary control is −Δ
Pe and its output is Δ
us. After neglecting
, part 1 becomes
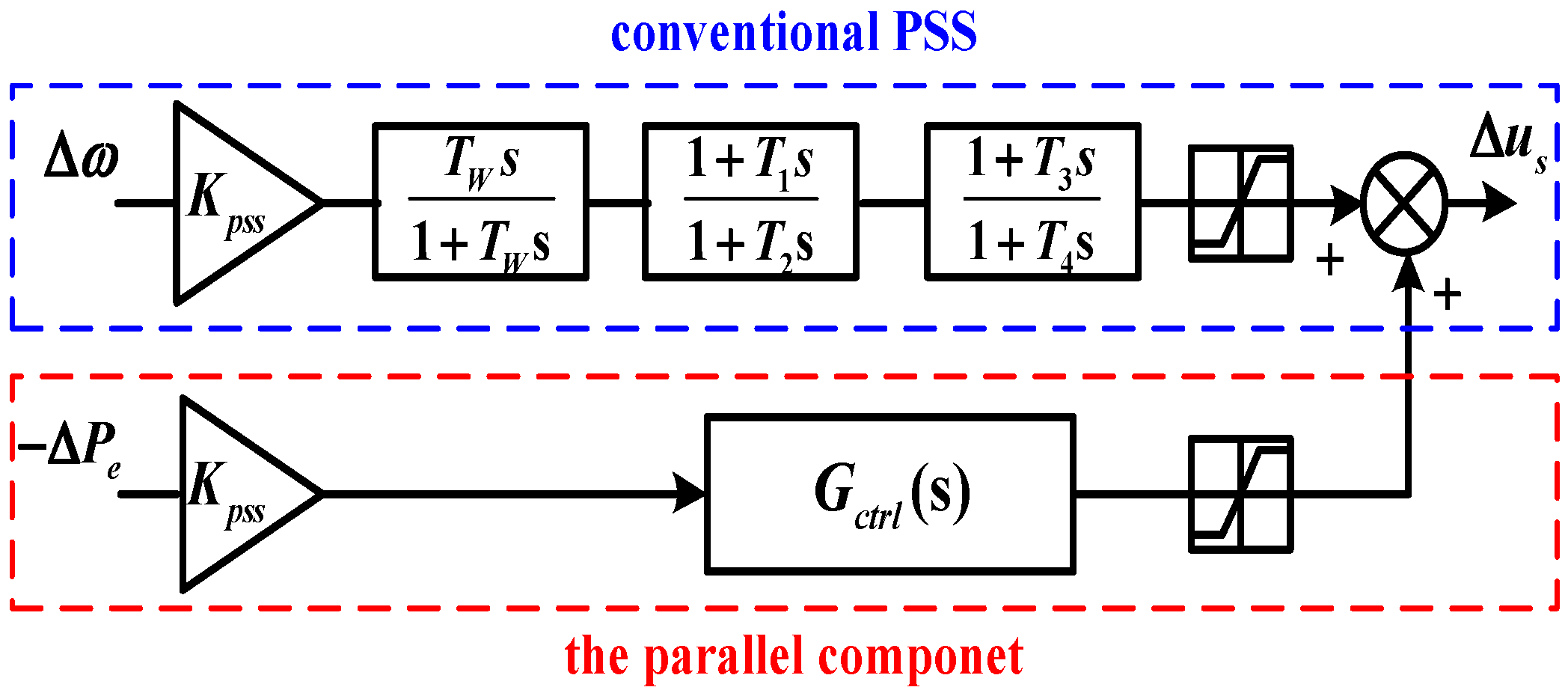
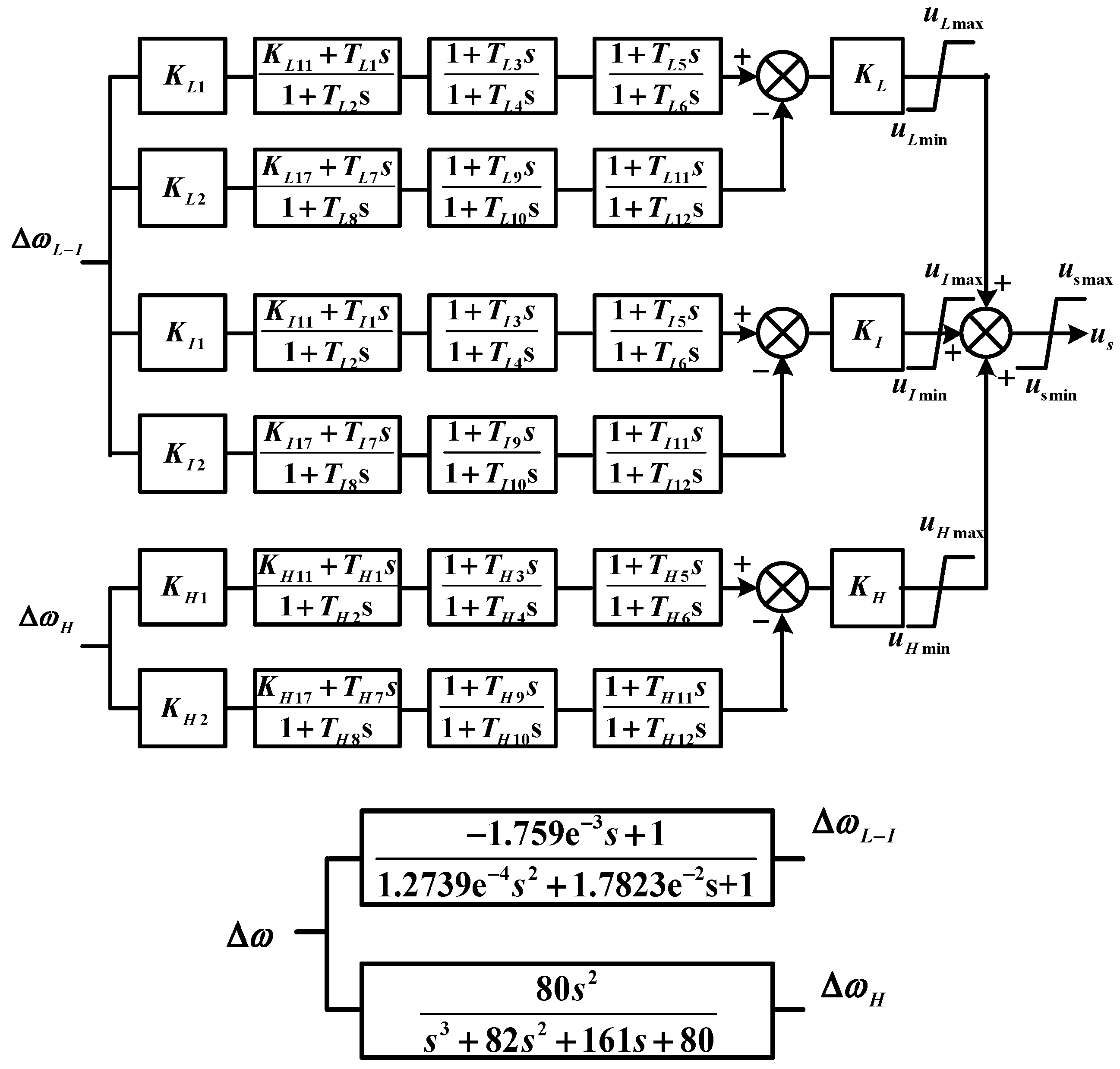
, so it is reasonable to add this supplementary control on the PSS. Therefore, an NPSS by adding a parallel component on the conventional PSS is proposed. The model of the NPSS is designed as
Figure 4 shows.
This parallel component should improve phase lead of PSS in the frequency range of 3–8 Hz but have little influence on the LFOs. In that case, it is reasonable that this component can be designed as a high pass filter as shown in Equation (2):
where
Kc is the filter gain and
Tc is the time constant.
The output of the NPSS is:
It consists of two parts, the former one is , the latter one is . The former one is the same as the conventional PSS. The latter one is the supplementary control provided by the parallel component. When the frequency of oscillation is low, s is small so that magnitude of the latter one is small that it has little influence on us. It indicates that the former one dominates the NPSS characteristics in the frequency range of LFOs. When s gets into the frequency range of exciter modes, the magnitude of the latter one increases significantly so that it can provide phase lead on part 1. In that case the phase characteristics of part 1 are improved so that the damping of exciter mode is enhanced.
3.2. Parameter Determination of the Proposed Novel Power System Stabilizer
The parallel component added to the PSS has brought two new parameters to be set, they are Tc and Kc. These two parameters can be tuned through Bode analysis. Considering that the component should have enough effect over 3 Hz and little effect under 2.5 Hz simultaneously, Tc should be as small as possible. It can be set to 0.01 s by taking practical limit into account.
To tune
Kc, its influence on the exciter-PSS loop should be investigated first in a single-machine infinite-bus system. The sixth-order generator model and its typical parameters are used to calculate the phase-frequency characteristics of the exciter-PSS loop. The parameters of the generator are shown in
Table A1 in the
appendix. The proposed PSS is used and the gain
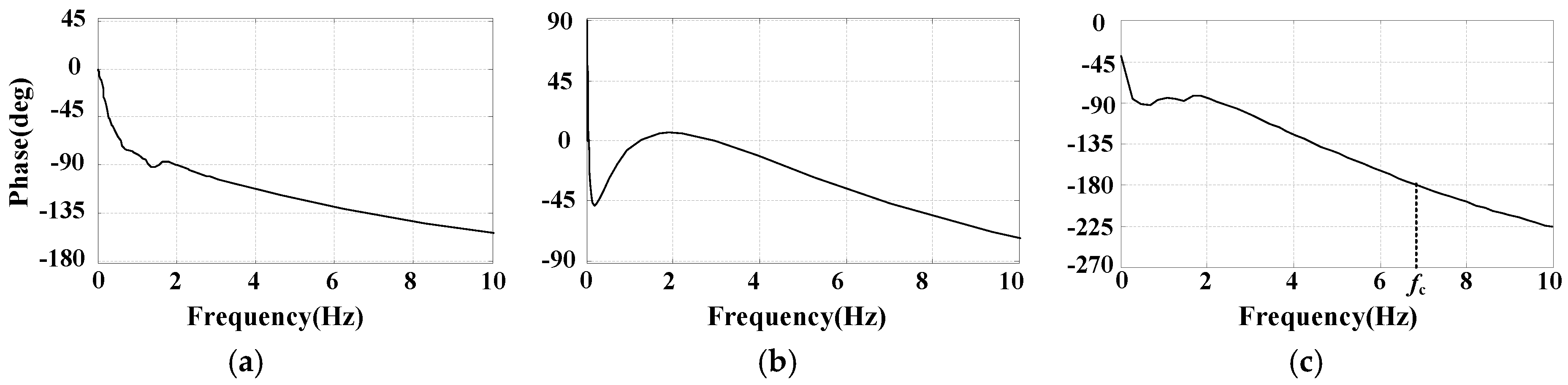
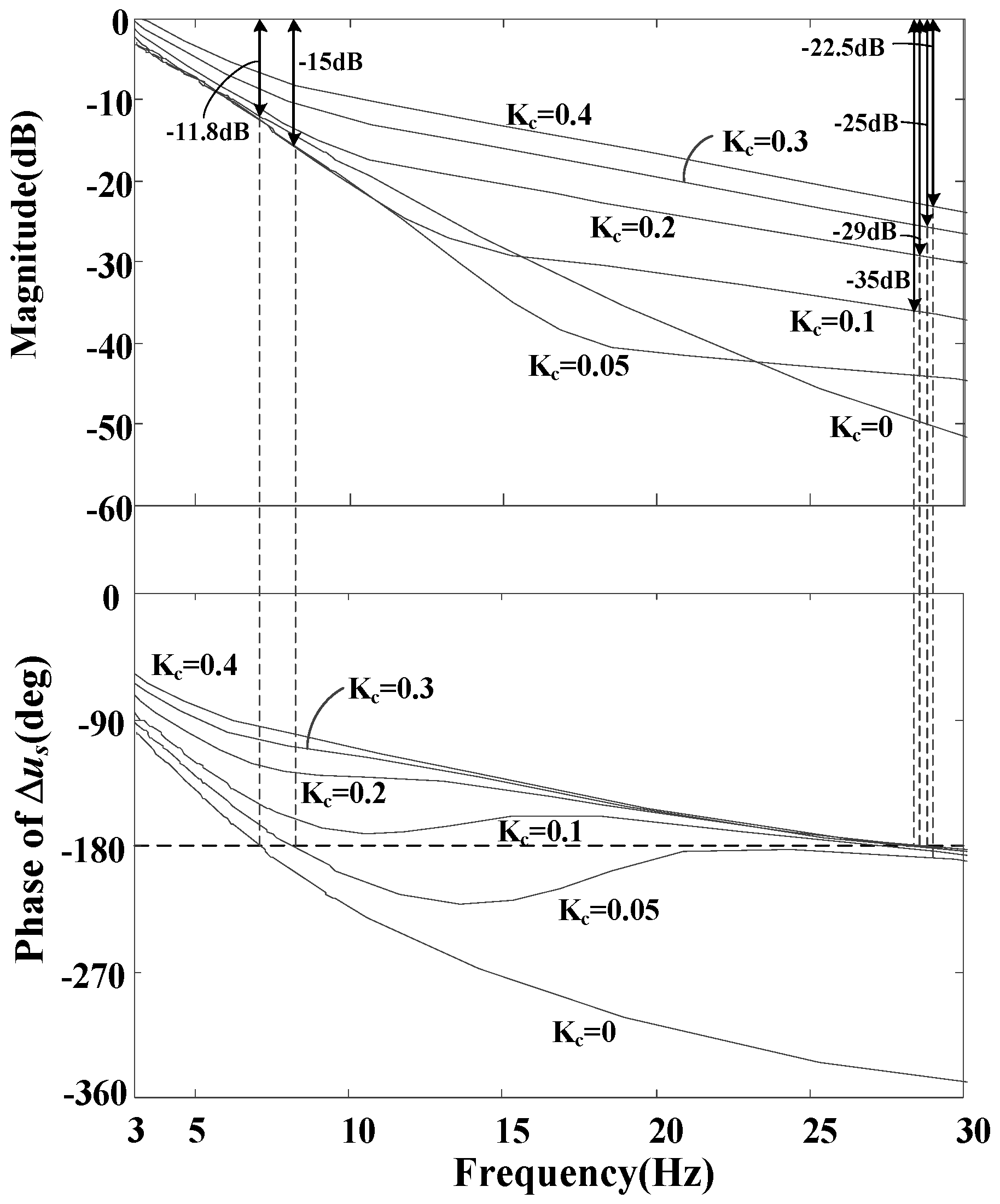
Kpss of the NPSS is set to be 10. The open-loop Bode diagram of the exciter-PSS loop in 3–30 Hz frequency range versus the variations of
Kc is shown in
Figure 5. The improvements of the phase characteristics can be seen with the increasing of
Kc. According to the analysis in
Section 2, the magnitude of the loop at the frequency where the phase of Δ
us crosses −180° indicates the critical gain of the system. For example, when
Kc = 0.05, the loop magnitude of the frequency where phase of Δ
us crosses −180° is −15 dB, means the critical gain
Kmax is 56. That is 5.6 times of the current gain.
When Kc increases to 0.1, the frequency that phase-frequency characteristic passes through −180° suddenly changes from 8 Hz to 27 Hz. At the same time, the loop magnitude changes from −15 dB to −35 dB. It means that the critical gain of this loop changes from 5.6 times to 56 times of the current gain. That is to say, with the increase of Kc, the frequency that loop phase characteristic crosses −180° gets higher. The magnitude of the loop at such high frequencies is small. Thus, the critical gain of the proposed PSS is significantly improved.
From the above analysis, phase characteristics of the exciter-PSS loop ϕ are determined by Kc. Kc has a minimum value Kcmin that can change the frequency of exciter mode from 8 Hz to 27 Hz. This Kcmin satisfies the condition that ∂2/∂ω2 > 0, ∂ϕ/∂ω = 0 have one solution ω0, and ϕ(ω0)= −180° in the frequency range of 3–30 Hz. Therefore, Kcmin can be acquired by solving the former equations.
From
Figure 5, it also can be seen that with the increasing of
Kc, the phase lead provided to the system tends to be saturated while the magnitude response of the loop continues to increase. It indicates that the parallel component will bring unbeneficial effect to the system when the value of
Kc gets too large. Moreover, the value of
Kc should be as small as possible to prevent this component from influencing the phase characteristics in the frequency range of 0.2–2.5 Hz. Besides,
Kc should be larger than
Kcmin to some extent to ensure its effectiveness. Taking all above into consideration,
Kc should be chosen as 1.1–1.2
Kcmin.
In the above example, it can be calculated that ϕ will be −180° at ω0 = 69.7 rad/s when Kcmin = 0.091. Then Kc can be chosen as Kc = 1.1 Kcmin = 0.1. In that case, the exciter mode is changed from the frequency range of 3–8 Hz to the frequency range that over 25 Hz. Its critical gain is improved from 5.6 times to 56 times of the current gain. That is to say, critical gain of the NPSS is significantly improved. It makes the chosen gain of NPSS flexible enough to provide sufficient damping and do not exceed 1/3 of its critical gain simultaneously.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













