1. Introduction
There is a trend to increase the power produced by each individual turbine in order to reduce the cost of wind energy by the so-called upscaling trend. Bigger wind turbines have the advantage that they can harvest wind at higher altitudes, resulting in bigger wind speeds and allowing the turbine to be equipped with bigger blades. Moreover, it is assumed that by decreasing the number of machines per megawatt the operations and maintenance costs of the wind park will decrease. Bigger wind turbines and corresponding blades impose higher loads on the wind turbine components, amongst others on the drive train. Moreover, these loads cannot be assumed to be quasi-static as in most industrial applications. Wind turbine loading includes aerodynamic loads at variable wind speeds, gravitational loads and corresponding bending moments, inertial loads due to acceleration, centrifugal and gyroscopic effects, operational loads such as generator torque, and loads induced by certain control actions like blade pitching, starting up, emergency braking, or yawing [
1,
2,
3,
4]. These dynamic loads are significantly influencing the fatigue life of the wind turbine structural components. In addition to the tower and blades, the drivetrain has several structural components for which the design is fatigue driven, such as for example the torque arms of the gearbox. In addition to turbine reliability, noise and vibration (N & V) behavior is becoming increasingly important for onshore turbines [
5]. Since aerodynamic noise is decreasing by means of improved blade designs, the problem is shifting towards drivetrain tonalities. Accurate insights into the dynamic behavior of wind turbines are necessary to avoid these tonalities. This is because bigger turbines imply that the resonance frequencies of the drivetrain are decreasing towards the excitations coming from the wind turbine rotor and gears of the gearbox [
2]. Therefore, the flexibility of the structural components of the drivetrain is becoming increasingly influential on the dynamic design of the drivetrain [
6]. Accurate knowledge about the resonance behavior of the drivetrain is as such essential for improved design both for fatigue and reliability as for noise. If resonances are coinciding with harmonic excitation frequencies, there is potential for increased fatigue life consumption and tonal excitation. Operational modal analysis (OMA) has proven its use in aerospace and automotive and is increasingly used nowadays in the wind energy domain. There are different frequency ranges of interest for the wind turbine. The lower frequency range contains more global modes of the wind turbine, such as the blade modes, tower modes, and general drivetrain modes. For the drivetrain, the higher frequency ranges contain more localized modes of the gearbox and generator.
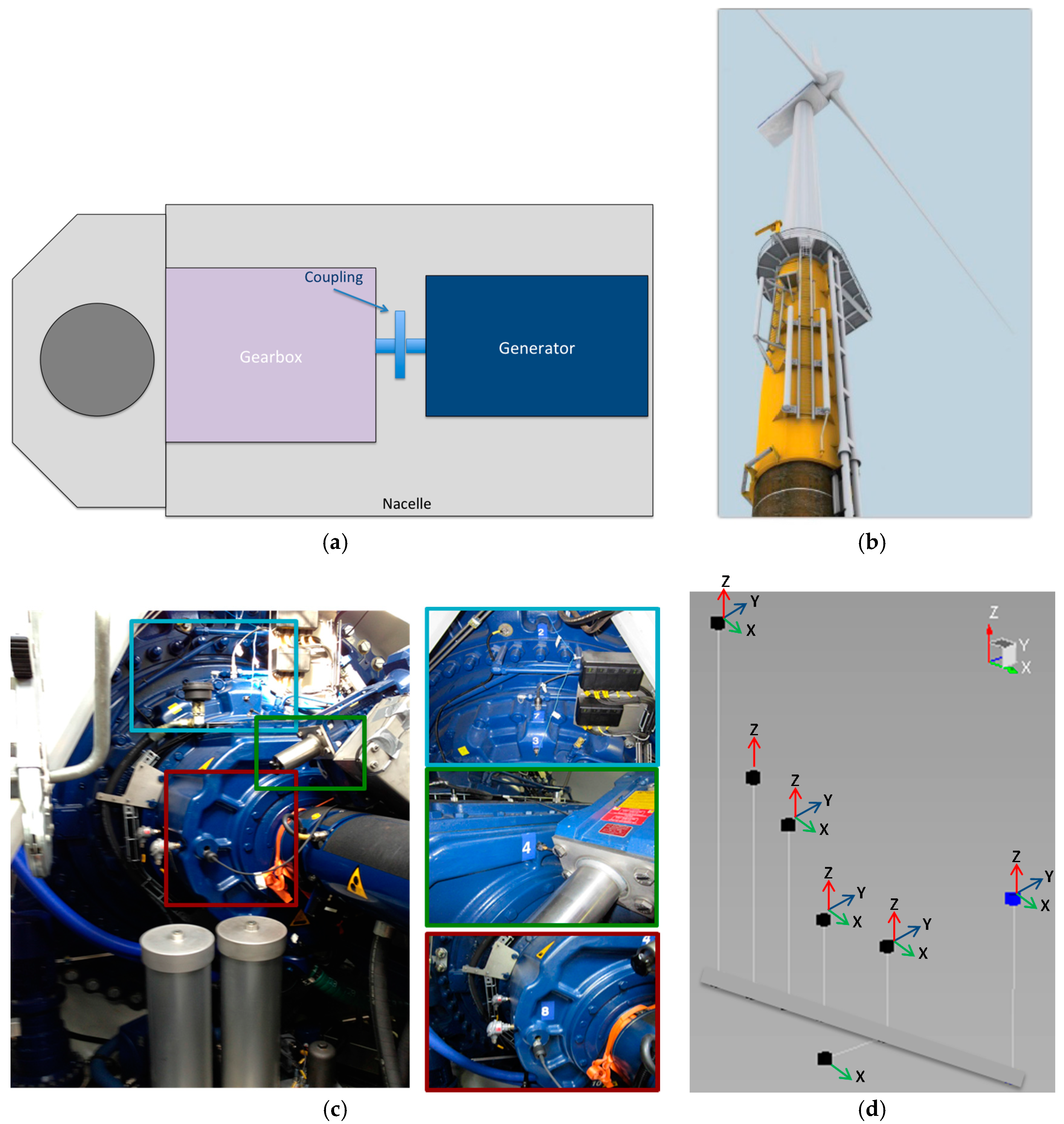
This paper discusses a preliminary study for characterizing the challenges for the use of OMA for characterizing the dynamic behavior of the wind turbine drivetrain and by extension the other main components of the turbine. The potential for OMA techniques to characterize the eigenfrequencies value, damping ratios, and mode shape for these resonances will be shown through the presented results. We want to take the initial step towards the full dynamic characterization of the wind turbine by means of accelerometers mounted on the drivetrain. This article has two main objectives. The first objective is to validate the correctness of long-term vibration data sets acquired from 17 accelerometers positioned on the drivetrain (gearbox and the generator) of an offshore wind turbine (OWT). The second objective is to introduce the first results of the automatic tracking of some vibration modes of the drivetrain system. In this study, we investigate the low frequency range (<2 Hz) with the objective to detect some tower and blade modes and compare the results with published ones that were obtained using acceleration signals measured from sensors located directly on the tower of the same wind turbine. In the high frequency range (>2 Hz), the first results of an automatic tracking of some drivetrain modes will be given.
3. Data Validation: Low Frequency-Band Analysis
Since detailed knowledge about the specifics of the drivetrain itself is not available, it is advisable to first validate the correctness and the quality of the measured data. To do so, a short-term tracking of the modal parameters of the vibration modes in a low frequency-band (i.e., 0–2 Hz) will be done over the different 12 datasets, and the results from this analysis will be compared to published ones [
7,
8] for the same turbine. The modes in this band are basically the dominant vibration modes of both the tower and the turbine’s blades.
According to the results of some previous intensive studies [
7,
8,
9,
10,
11,
12] on the identification of the physical vibration modes of the tower, foundation system, and the blades of the instrumented OWT, it can be concluded that the most dominant vibration modes of those structures can be detected in a frequency range of 0–2 Hz. For the tower and the foundation system, the most dominant modes are named as follows according to [
7]:
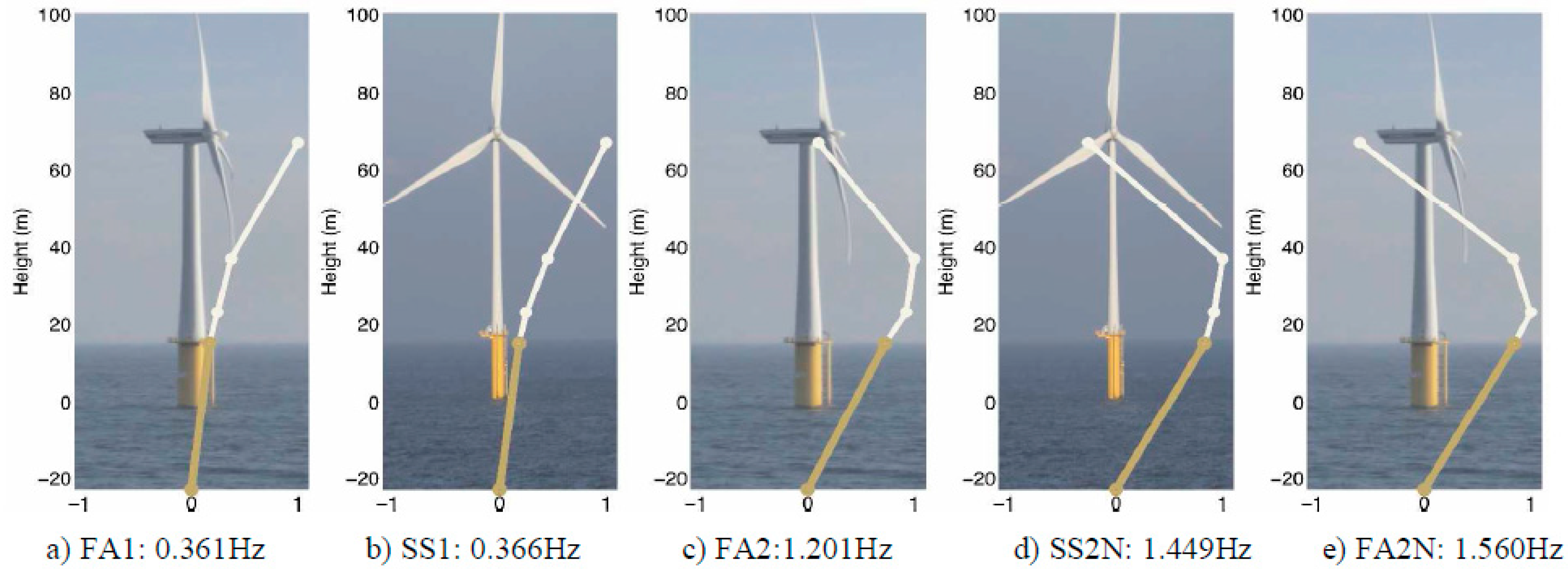
First for-aft bending tower mode (FA1)
First side-side bending tower mode (SS1)
Second for-aft bending mode tower component (FA2)
Second side-side bending mode tower and nacelle component (SS2N)
Second for-aft bending mode tower and nacelle component (FA2N)
The mode shapes together with the resonance frequency values of those modes are shown in
Figure 2. Based on the work done in [
8], some other modes related to the blades and the drivetrain can be detected in the frequency band 0–2 Hz. Those modes are the first drivetrain torsional mode (DTT1), the first blade asymmetric flapwise pitch (B1AFP) mode, the first blade asymmetric flapwise yaw (B1AFY) mode, the first blade collective flap (B1CF) mode, and the first blade asymmetric edgewise yaw (B1AEY) mode.
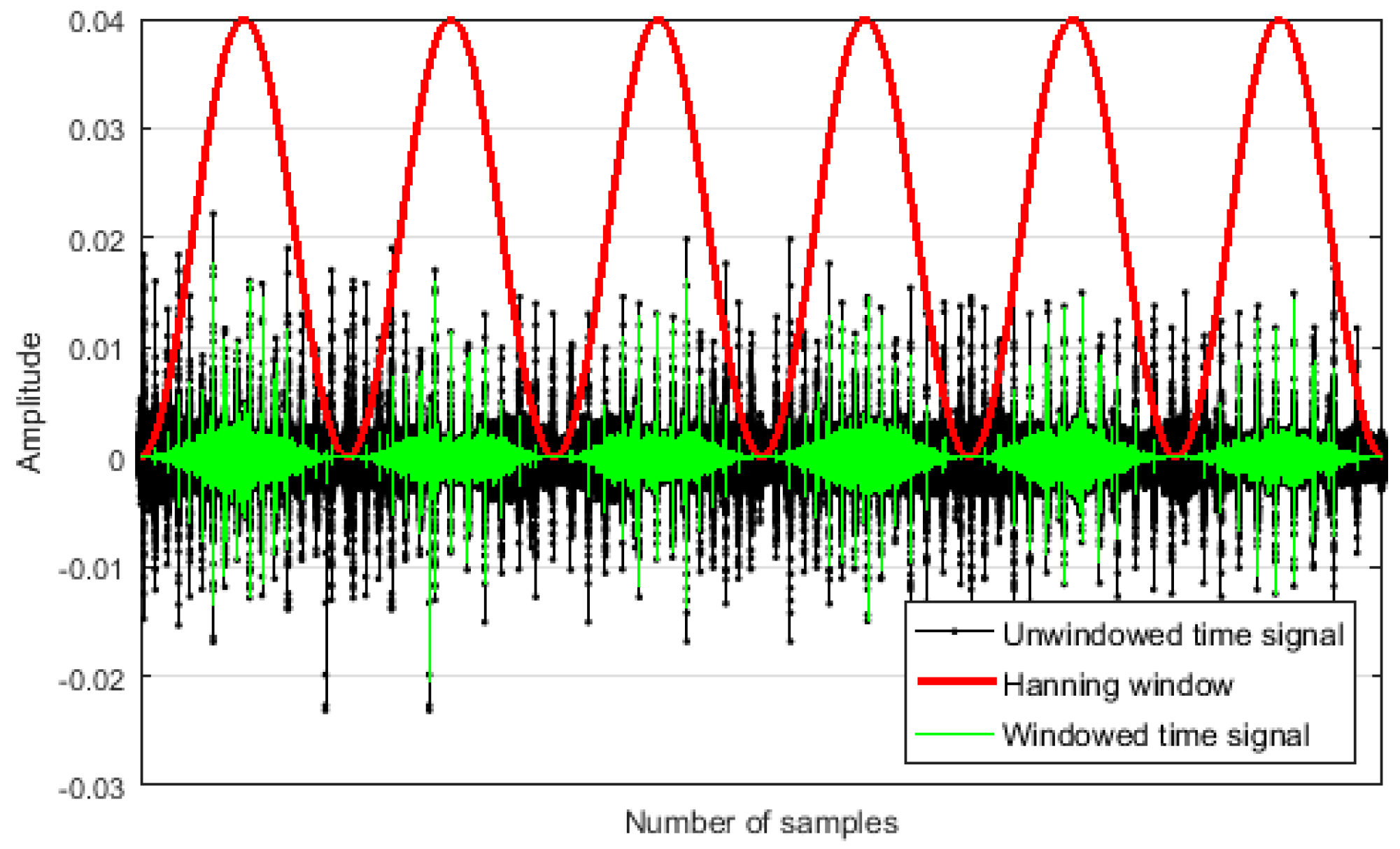
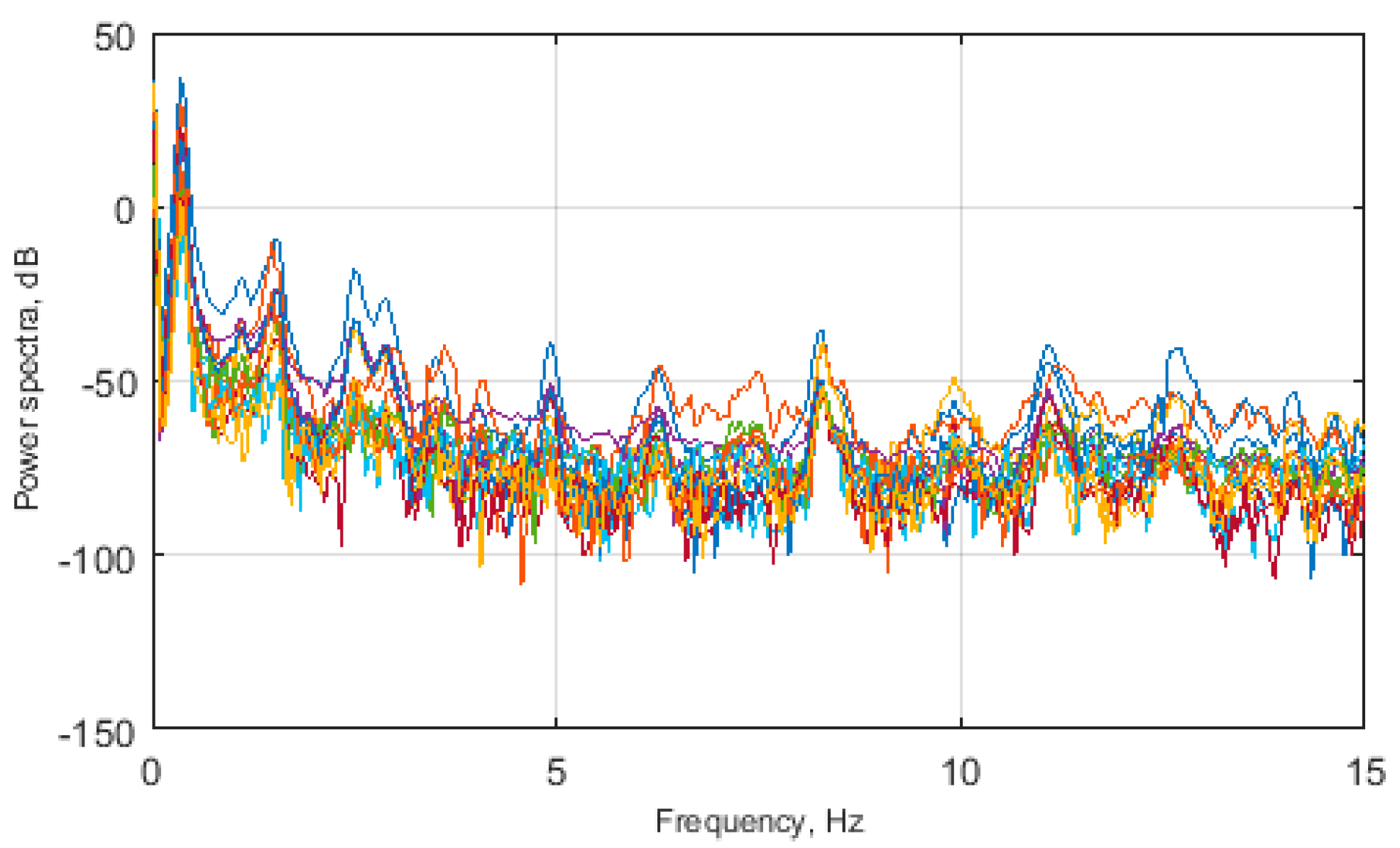
The selected 12 data records are consecutively processed in frequency domain for a frequency band goes up to 2 Hz, and the most dominant in-band modes are estimated and manually tracked based on the frequency values presented in [
7,
8]. The auto and cross power spectra are estimated using the Correlogram approach [
13,
14] as it was used in the reference article (i.e., [
7]) to estimate the frequency-domain data. The polyreference linear least-squares complex exponential (pLSCE) estimator [
15,
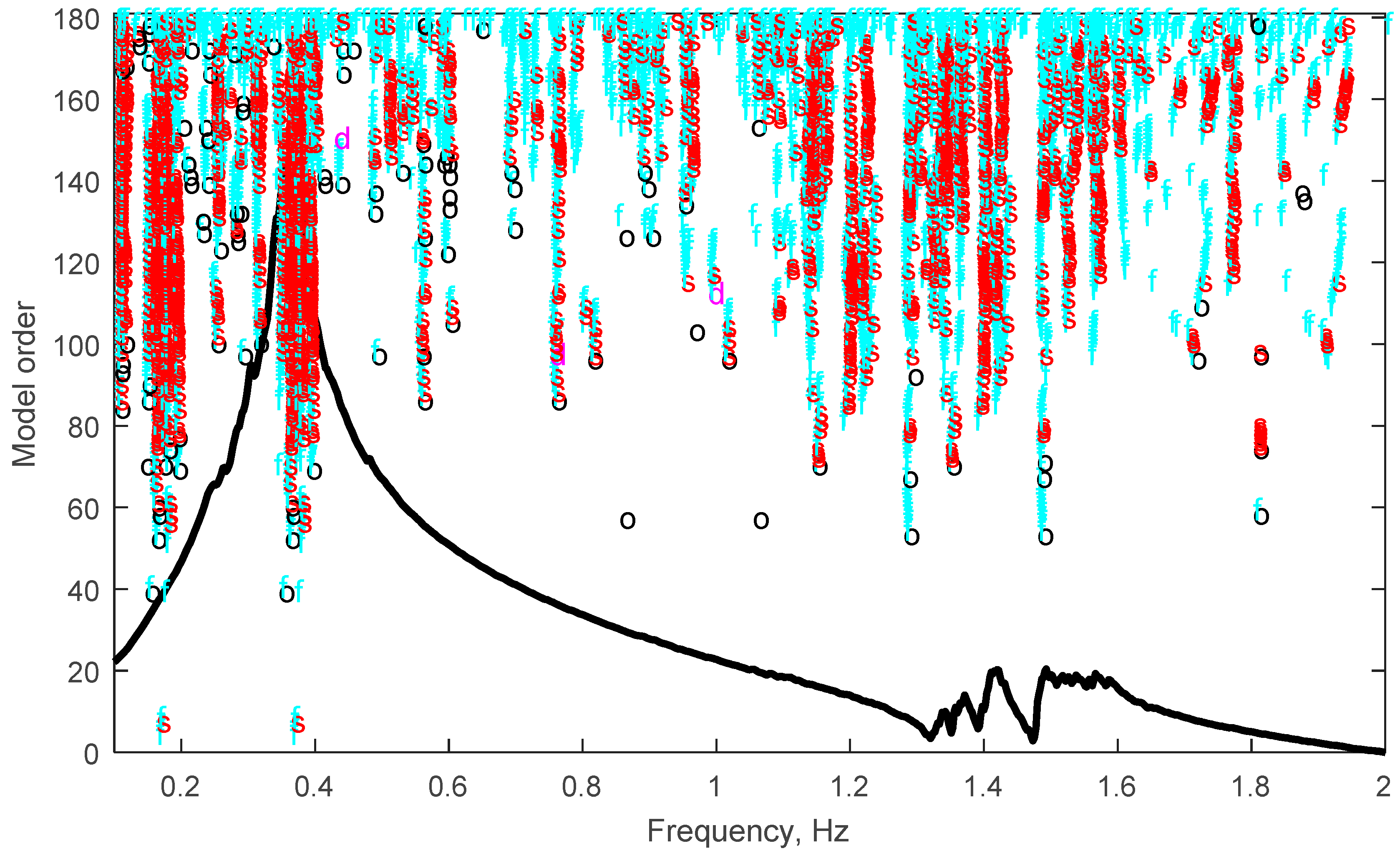
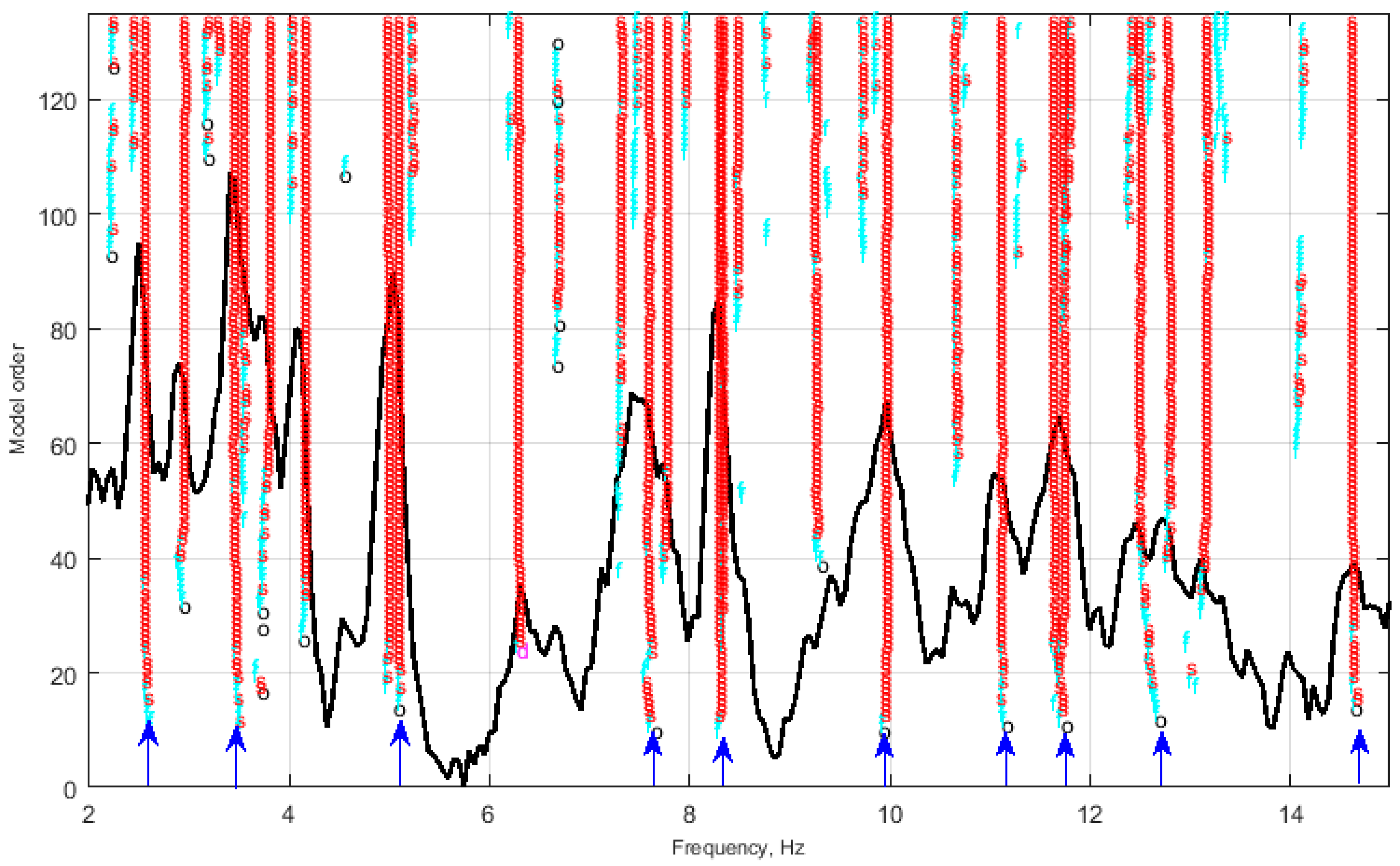
16] is used to estimate the modes within the selected frequency band, and a stabilization chart is built for each data record to facilitate the selection of the physical vibration modes. The stabilization chart is a very well-known mode selection tool in the modal analysis community. In this chart, the resonance frequencies of the identified poles are visualized for different model orders. The frequency is presented on the x-axis; the vertical axis shows the model order for which the poles are identified. The model order is the polynomial order which the modal parameter estimator uses to fit the measured data. A symbol is associated to each pole corresponding to the degree of the stabilization of the pole in terms of frequency and damping when compared to the analysis at the previous model order. An “o” corresponds to a new identified pole, “f” indicates that the estimated pole is stable in terms of frequency value (i.e., the variation on the frequency value is within for instance 5% when the model order changes), “d” implies that the identified pole is stable in terms of the damping value (i.e., the variation on the damping value is within for instance 10% when the model order changes), “s” corresponds to a pole that is stable in terms of frequency and damping values. In the stabilization chart, the physical modes show relatively consistent behavior when the model order changes. Therefore, they show up in the stabilization chart as vertical lines with a lot of “s” symbol.
Figure 3 shows a typical stabilization chart for one of the analyzed data records in the low frequency range. It is found that the dominant tower and blade modes appear consistently at the same locations in the stabilization chart constructed over the different data records. Those modes are selected manually from the stabilization chart based on the values published in [
7,
8].
In
Table 1 and
Table 2, the mean value of the resonance frequencies of the tower, blades, and low-frequency drivetrain mode are summarized and compared to the reference values [
7,
8]. One can see from
Table 1 that the dominant tower’s modes are successfully detected except the third mode, i.e., FA2 at 1.20 Hz. This can be explained by the fact that this mode is mostly characterized by a tower motion rather than a nacelle motion (see
Figure 2 for the FA2 mode). That is why this mode is not well detectable from signals measured from the drivetrain system.
From
Table 1 and
Table 2, one can see that the mean value of the resonance frequencies of the global tower modes, the blade modes, and the first torsional drivetrain mode obtained from the signals measured from sensors mounted on the drivetrain agrees very well with the results obtained from signals measured from sensors mounted on the tower itself. The small differences in the values are acceptable, taking into account the following facts: First, the published results in [
7] were obtained using datasets of two weeks measured from sensors directly mounted on the tower itself. Second, the ambient conditions were different from the conditions of the drivetrain measurements campaign. Third, the sensors used on the drivetrain measurements campaign are aimed towards higher frequency region.
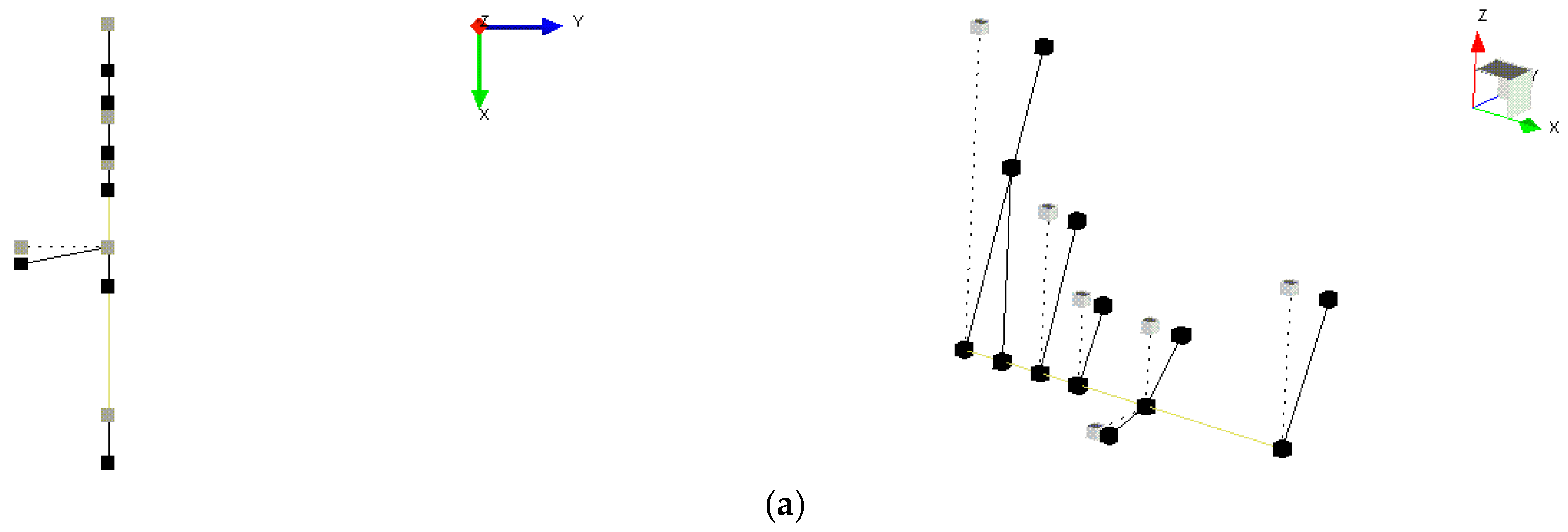
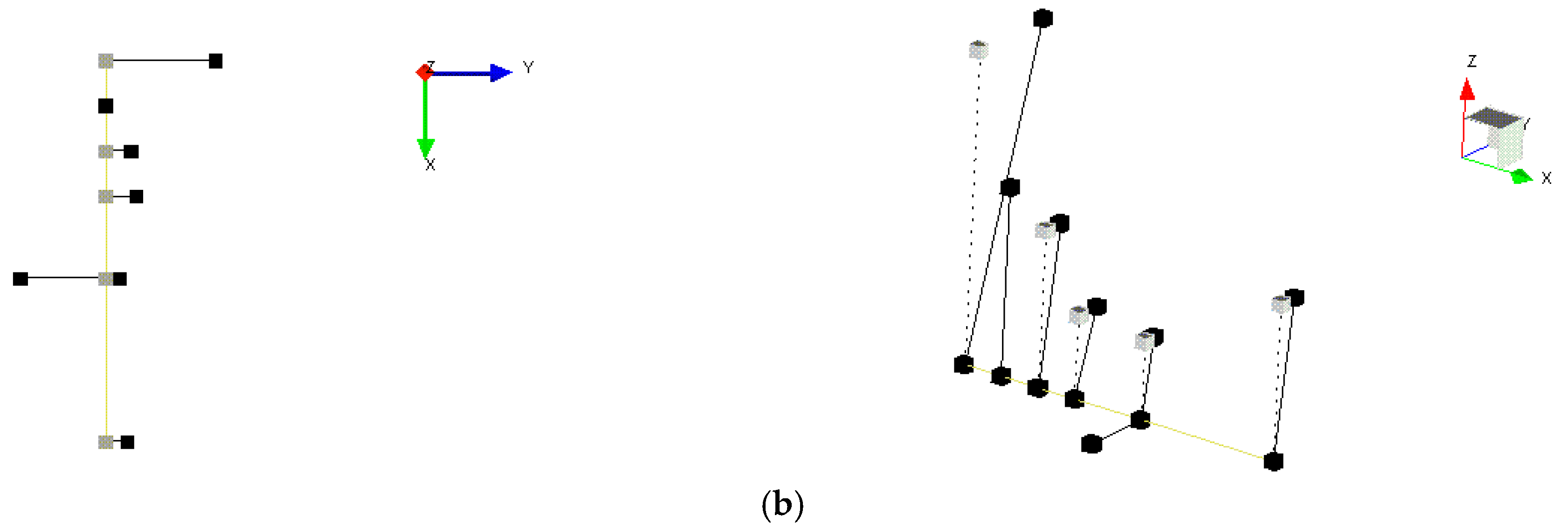
Since no sensors were mounted on the tower, it was not possible to plot the mode shapes of the tower modes. However, in
Figure 4 the mode shapes of the drivetrain system at the FA1 and SS1 frequencies are shown. The figure shows 2D and 3D representations for the mode shapes. For the FA1 mode the components of the mode shape in X-direction, which are the dominant ones in comparison to the y-components at that frequency, are plotted. For the SS1 mode, the components in Y-direction, which are the dominant ones in comparison to the x-components at that frequency, are plotted. In that figure, the grey boxes represent the undeformed model, while the black ones represent the deformed model. From these mode shapes, one can see that the movement of the drivetrain system resembles the tower movement where it goes in the for-aft direction (X-dir.) at 0.359 Hz (the tower FA1) and in the side-side direction (Y-dir.) at 0.371 Hz (the tower SS1 mode). The consistency of the obtained results in the low frequency-band with the previously published ones on the same turbine confirms the correctness of the measured data considering that the sensors that have been used on the drivetrain are aimed towards the higher frequency region for dynamic analysis of the drivetrain system.
5. Discussion on the First Results of the Automatic Tracking of the Drivetrain Modes
This paper investigates the turbine modal behavior while it is not producing energy. This specific operating condition will have an impact on the modal behavior observed in the drivetrain, since the teeth can be out of contact during these conditions; whereas this is necessarily the case for nominal power production [
23]. Moreover, the damping properties of the wind turbine will change according to the operating conditions [
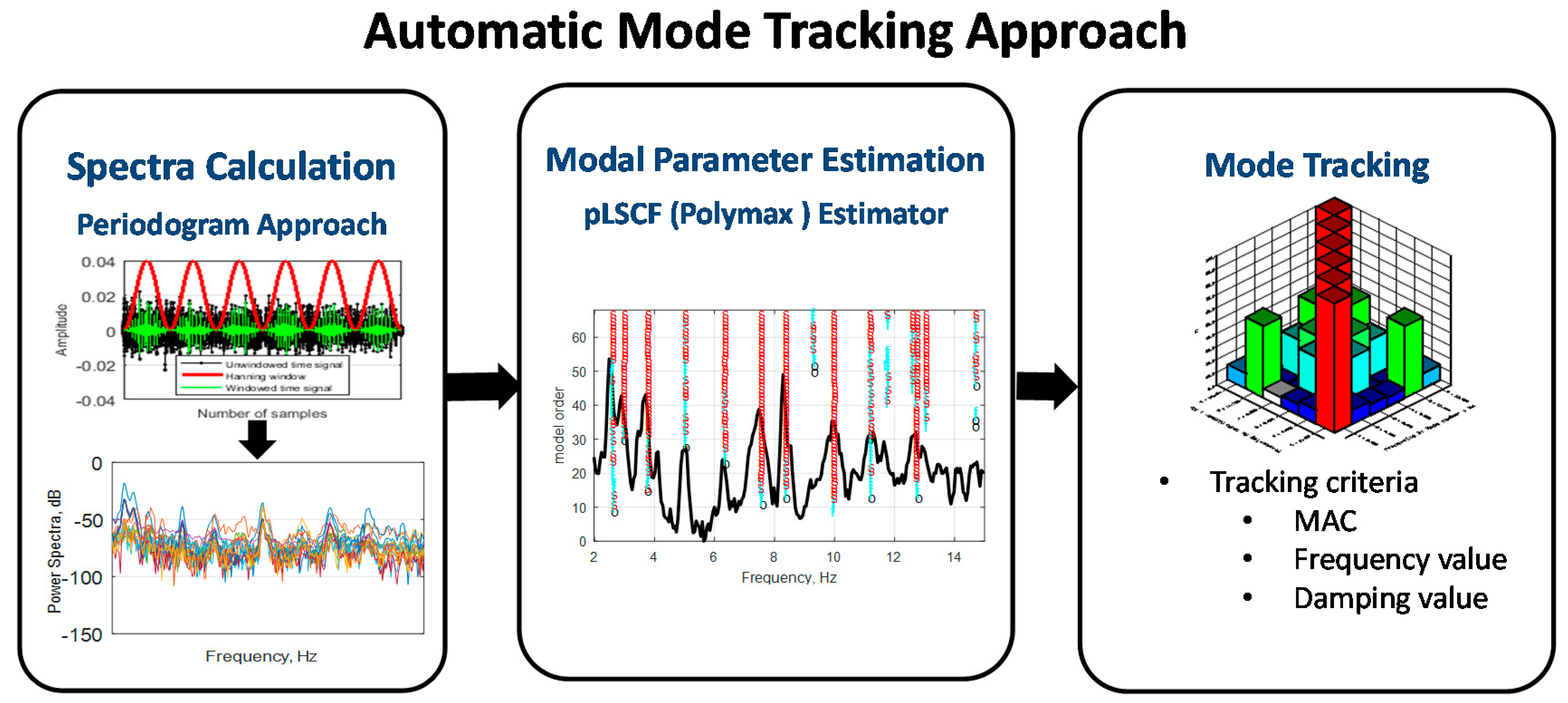
24]. The different steps described in
Section 4 are implemented in MATLAB (Version 2016a, MathWorks, Eindhoven, Netherlands) , and they are applied to the different time-domain data records. The modal parameter estimation is done in a frequency band goes from 2 Hz to 15 Hz. In this frequency band, the
pLSCF modal parameter estimator finds many modes that are related to the drivetrain dynamics.
Figure 9 shows a typical stabilization chart constructed by the
pLSCF estimator when applied to the power spectra matrix of the first data record. It can be seen from that figure that there are many modes in the analysis band. Some of these modes show up even if a low model order is used (indicated by the blue arrows), while some other modes are stabilized at a relatively higher model order. The model order is the polynomial order
that the
pLSCF estimator uses to fit Equation (3) to the measured data (see
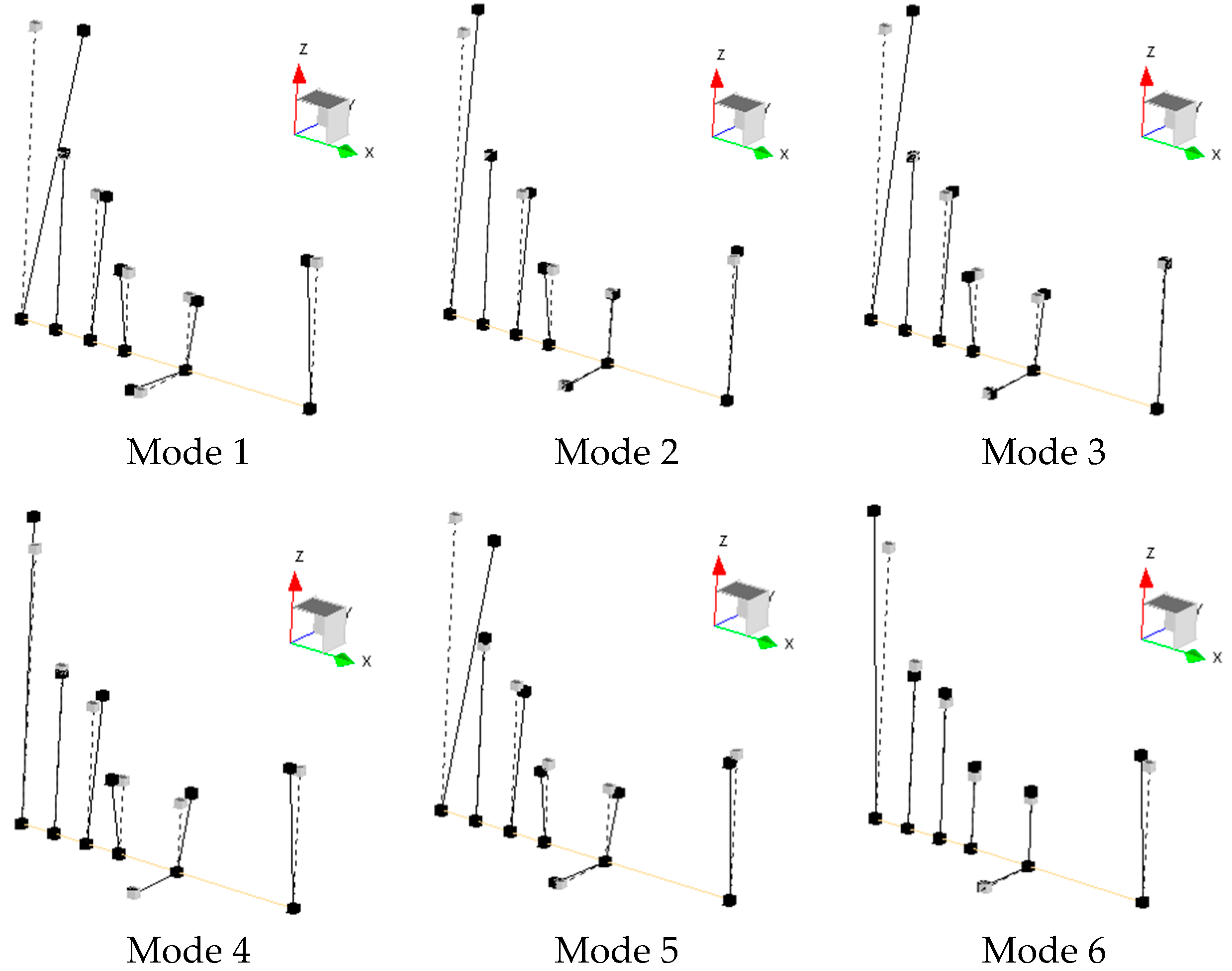
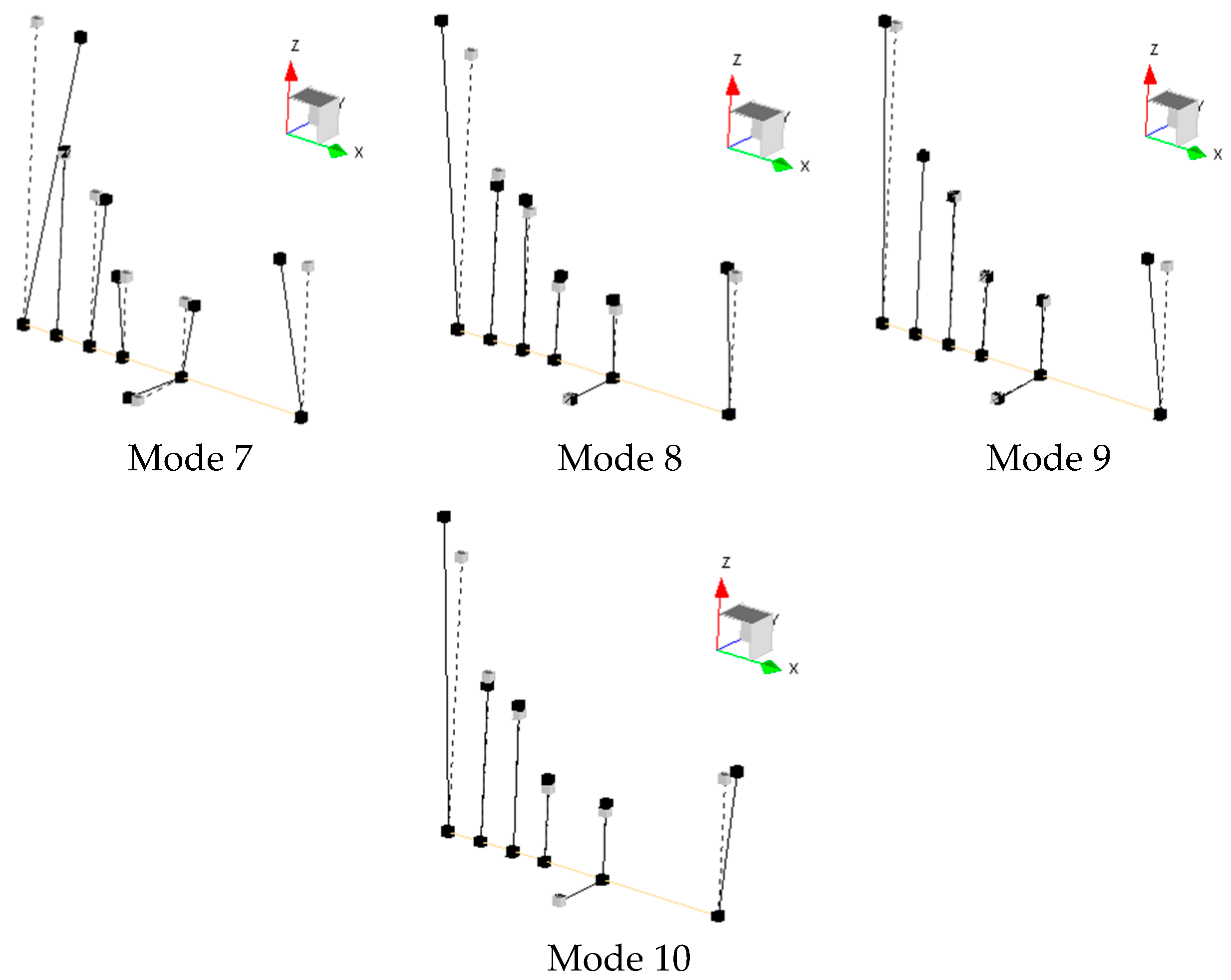
Section 4.2 for more details). For those modes that are detected at low model order, they are considered as the most dominant and physical modes for the structure under test since their observability is relatively high (i.e., can be detected at very low model order). Therefore, since a detailed knowledge about the specifics of the drivetrain itself and its vibration modes is not available, we selected those 10 most dominant modes, i.e., the ones indicated by the blue arrows in
Figure 9, to be tracked. The mode shapes and the pole values of those 10 dominant modes estimated from the first data record are taken as reference modes set. The mode shapes of those 10 modes are represented in
Figure 10.
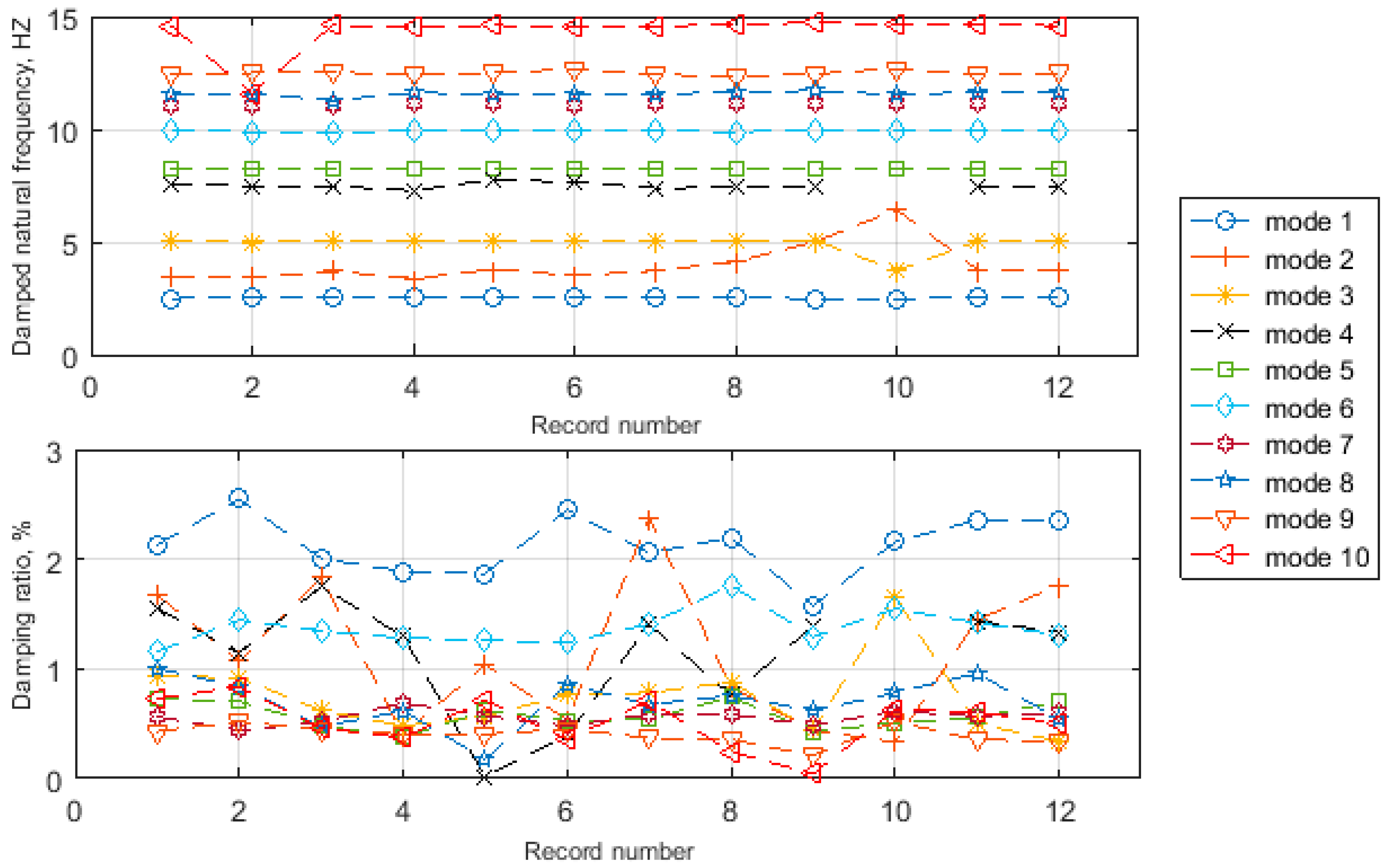
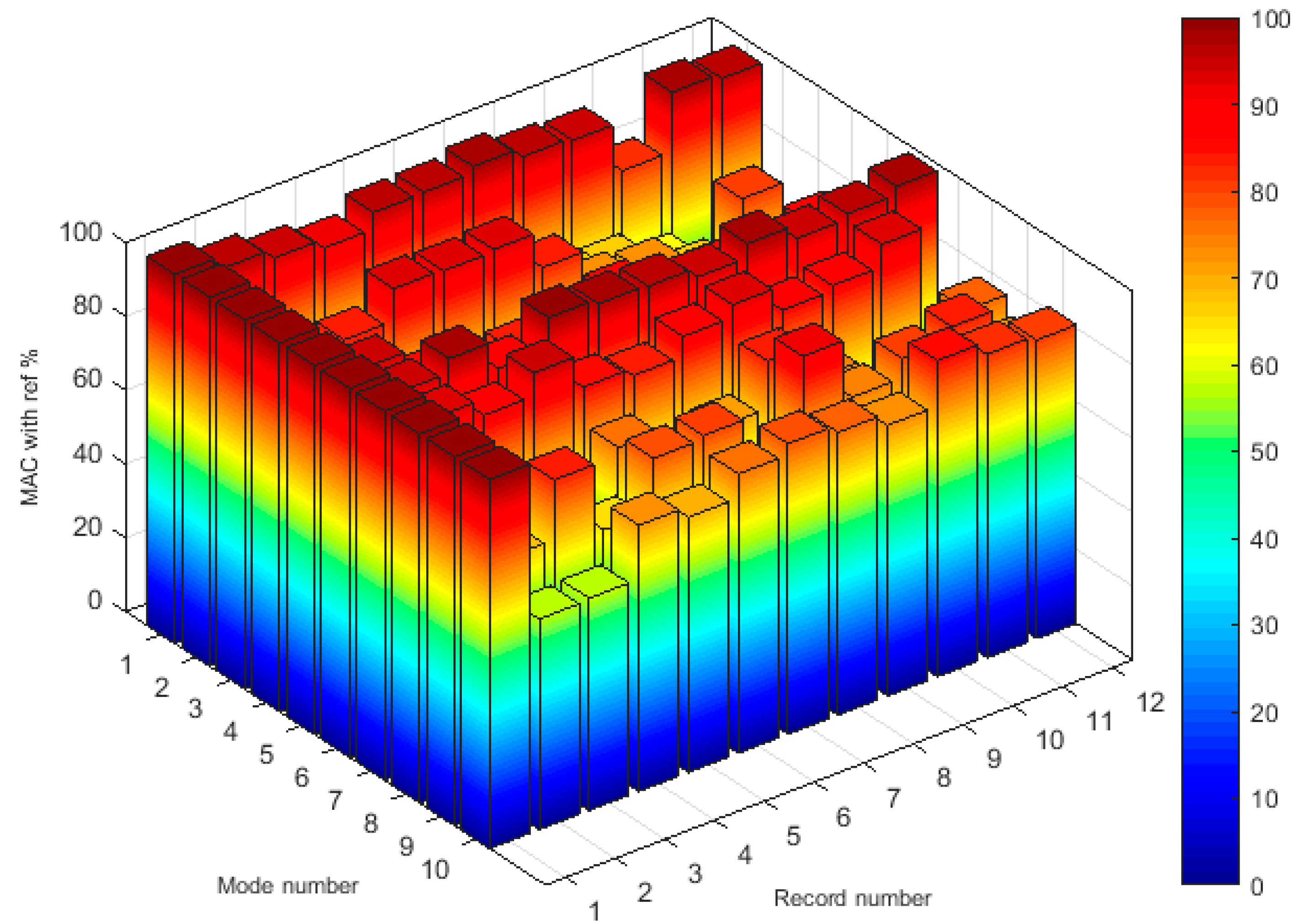
Figure 11 represents the evolution of the natural frequencies and the damping ratios of the 10 most dominant drivetrain modes identified in the analysis band, while
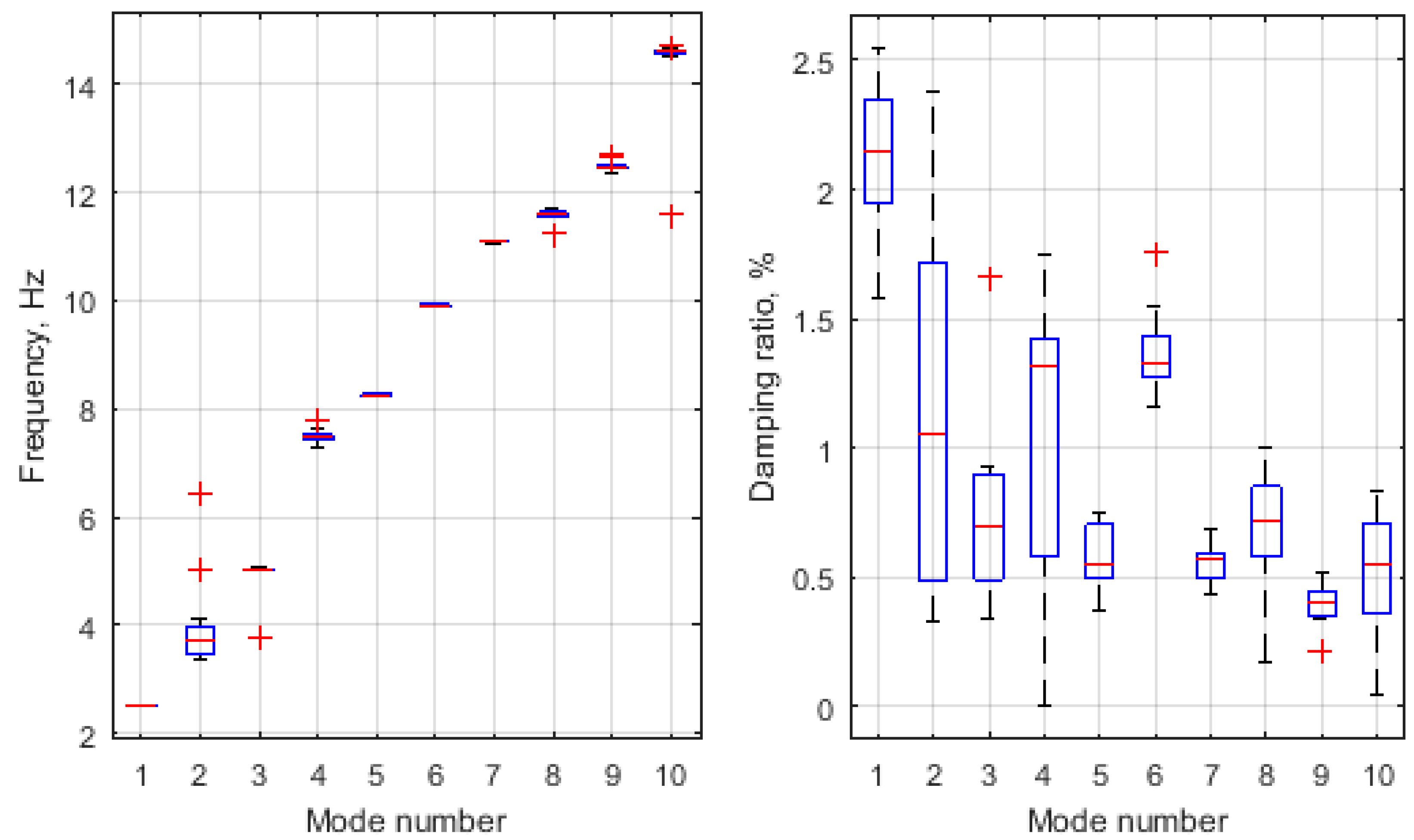
Figure 12 represents the evolution of the MAC calculated between the estimated mode shapes of the 10 most dominant modes and the reference ones over the tracking period. It can be seen that the frequency values are more consistent in comparison to the damping estimates, which is normal since the damping is highly affected by the ambient conditions (e.g., wind speed). The effect of the ambient conditions on the consistency of the damping estimates can be explained by the fact that the wind turbine is a multi-physical machine with significant interaction between their subcomponents, and for the instrumented wind turbine the rotor is directly connected to the gearbox. Therefore, it is normal that the damping estimates for the drivetrain modes will be affected by the external ambient conditions. This can be also noted from the boxplots of the frequencies and damping ratios shown in
Figure 13. This figure illustrates one box and whisker plot per frequency and damping value of each tracked mode. The results in this figure show that, for all the modes, the resonance frequency values show a good level of consistency over the different data blocks except for the second mode.
In
Figure 11, it can be seen that it could happen that the second and the third modes are crossing each other. In terms of damping value, the second and the fourth modes have the highest level of scatter in comparison to the other modes. In terms of the mode shapes, one can see from
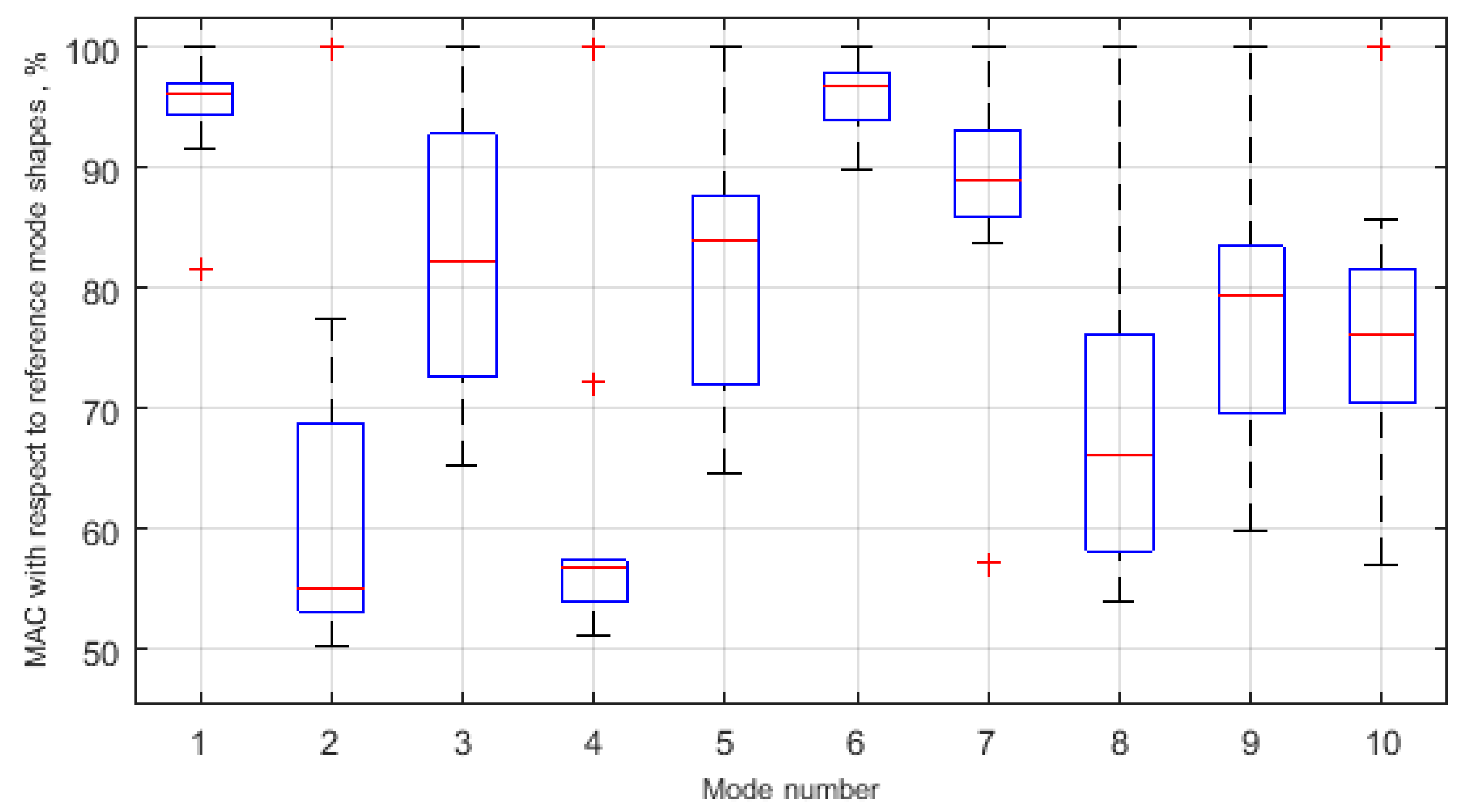
Figure 12 and
Figure 14 that most of the identified modes show a consistent behavior in term of the mode shapes where the median of the MAC value is above 60%. The second and the fourth modes show the lowest MAC over the tracking period in comparison with the other modes, and this agrees with their behavior in terms of frequency and damping (see
Figure 13).
This level of the consistency of the results over the tracking period (i.e., the 12 different processed data records) shows the repeatability of the analysis and underpins the applicability of the measurements and the modal estimation approach for the characterizing drivetrain model behavior.
In the case where the turbine is in operating conditions, the presence of the rotating components and their corresponding harmonics force contributions that do not comply with the OMA assumption (i.e., the input forces are white noise) will make the modal parameter estimation process difficult. In this case, special care must be taken to avoid mistaken harmonic components for true structural modes. Harmonics removal techniques [
25] can be used to clean the data from the harmonic components before doing the modal parameter estimation step. Therefore, the automatic mode tracking approach described in
Section 4 can be used when the wind turbine is in operating conditions provided that a harmonics-removing technique is used in advance to separate the true structural modes from the harmonic components. The analysis in this paper is focused on wind turbines in a standstill condition to ensure that the harmonics do not dominate the frequency spectrum and accurate estimates for the modal parameters of the drive train system will be obtained. These modal parameter estimates can be used as reference values when analyzing the wind turbine in operating conditions.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}