
Sliding Mode Control of a Variable- Speed Wind Energy Conversion System Using a Squirrel Cage Induction Generator

Abstract
:1. Introduction
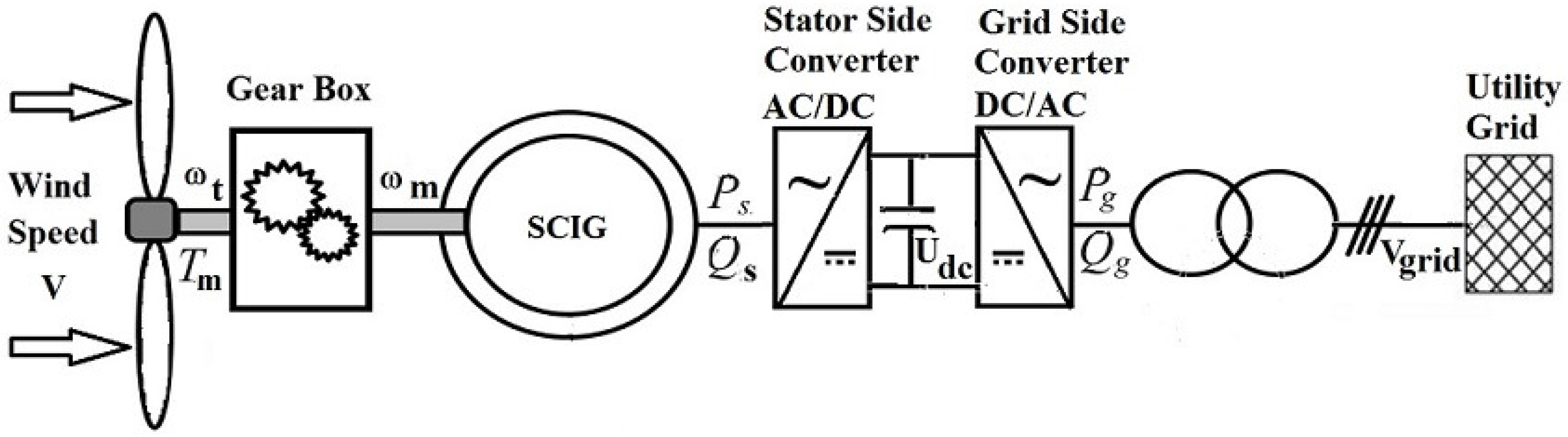
2. Model of the Wind Energy Conversion System
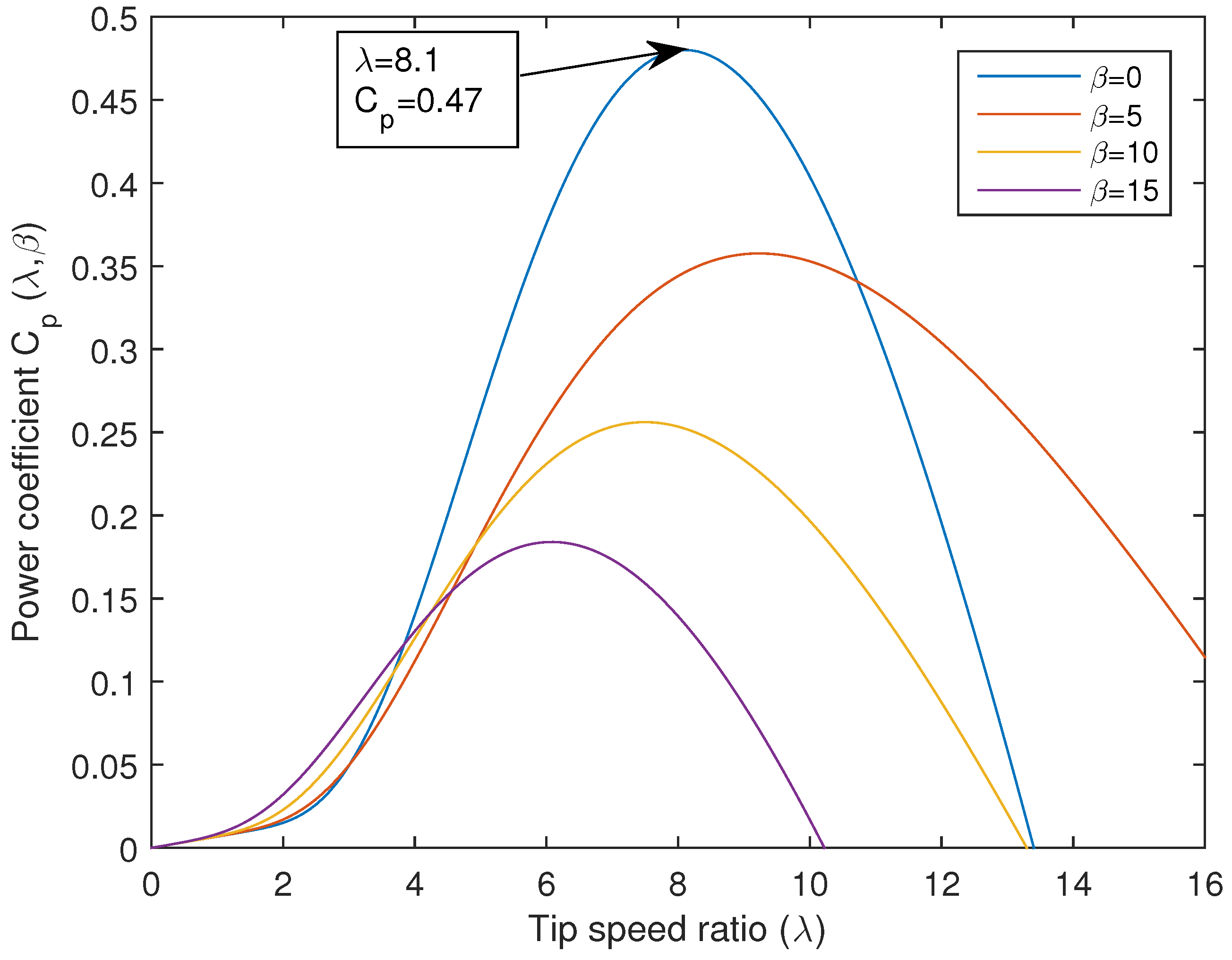
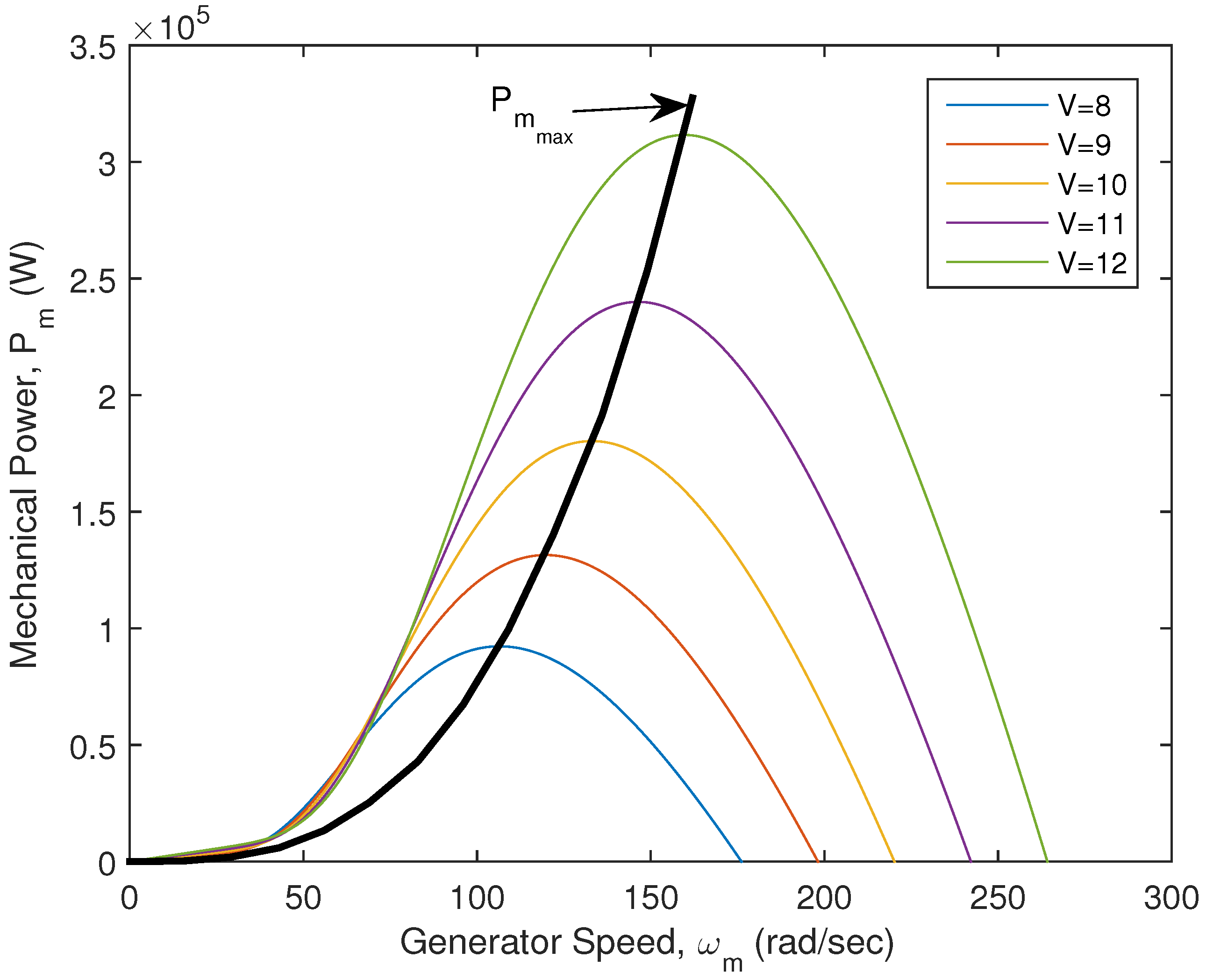
2.1. The Model of the Turbine and the Induction Generator
2.2. The Model of the Grid Side Converter
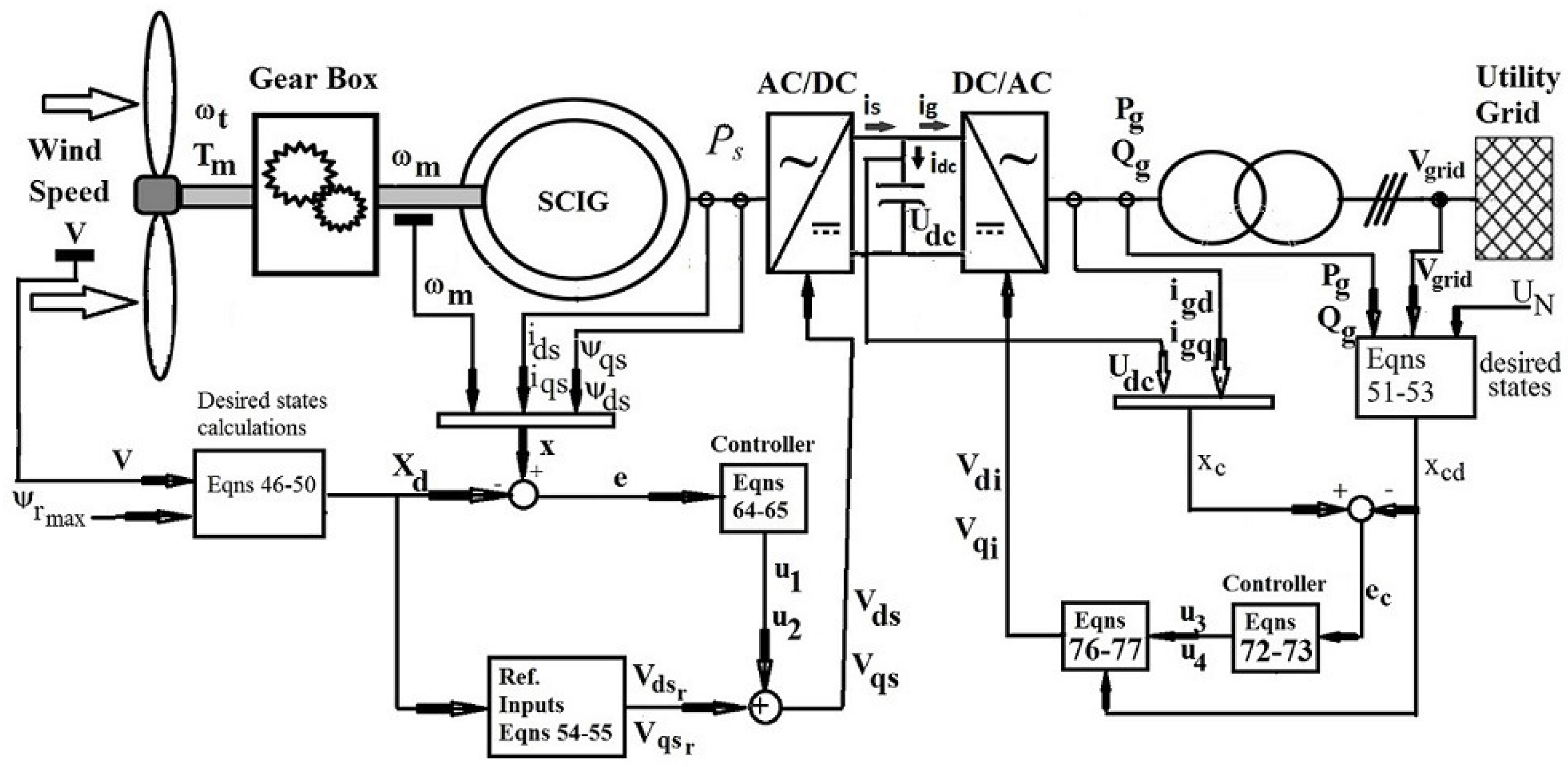
3. Computation of the Desired States and the Reference Inputs of the System
4. Control of the Wind Energy Power System
4.1. Design of a Sliding Mode Controller for the Turbine and the Induction Generator
4.2. Design of a Sliding Mode controller for the Grid Side Converter
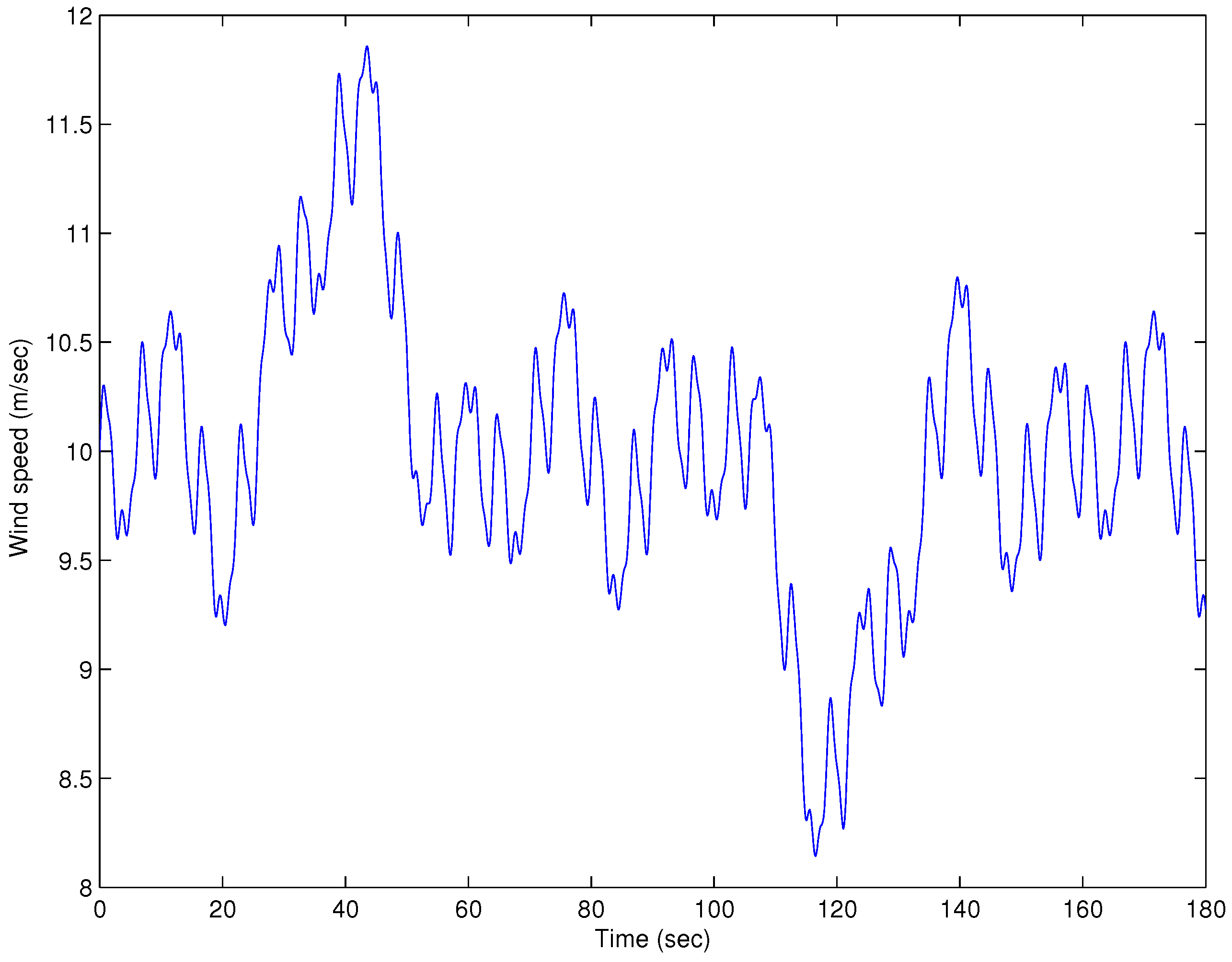
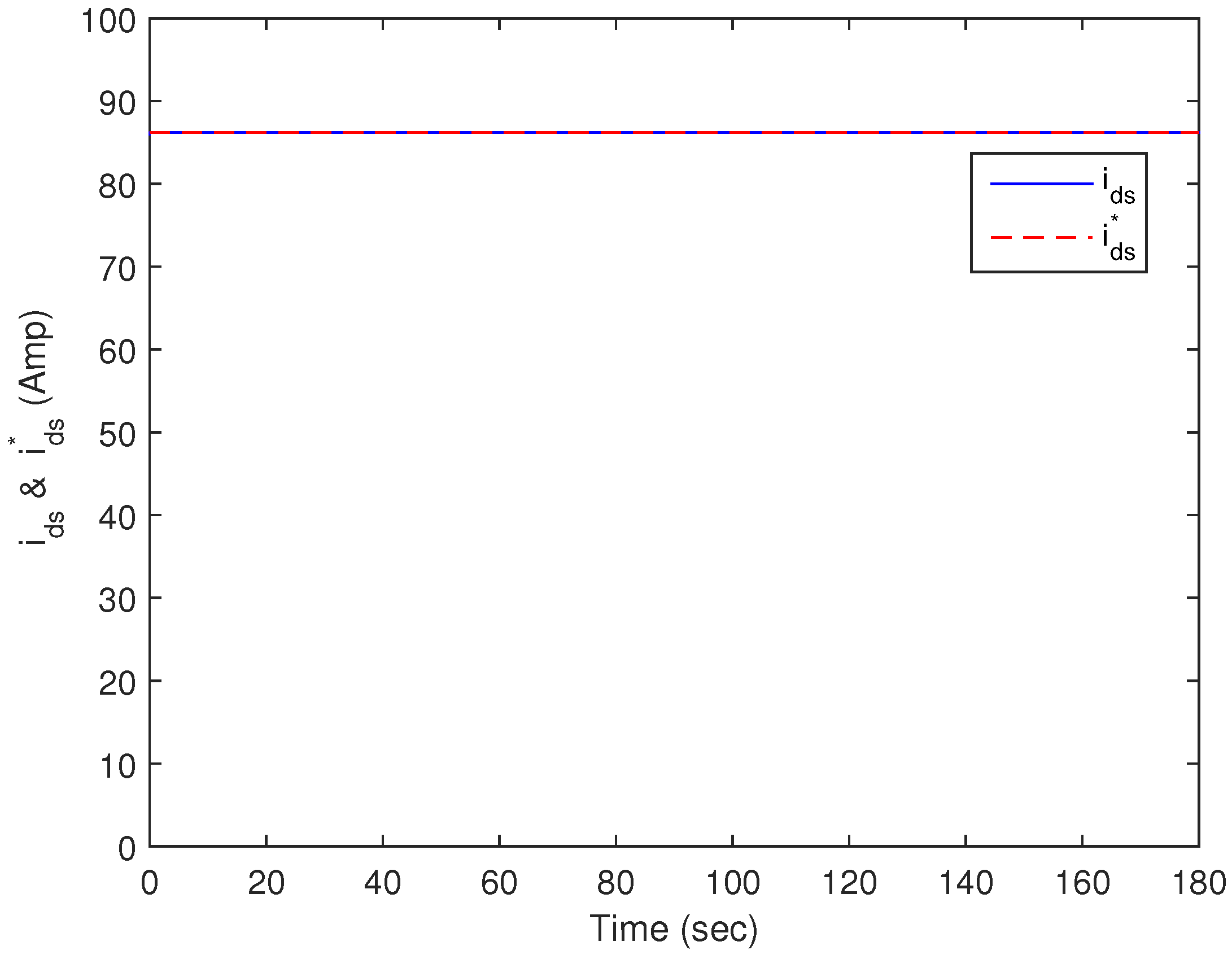
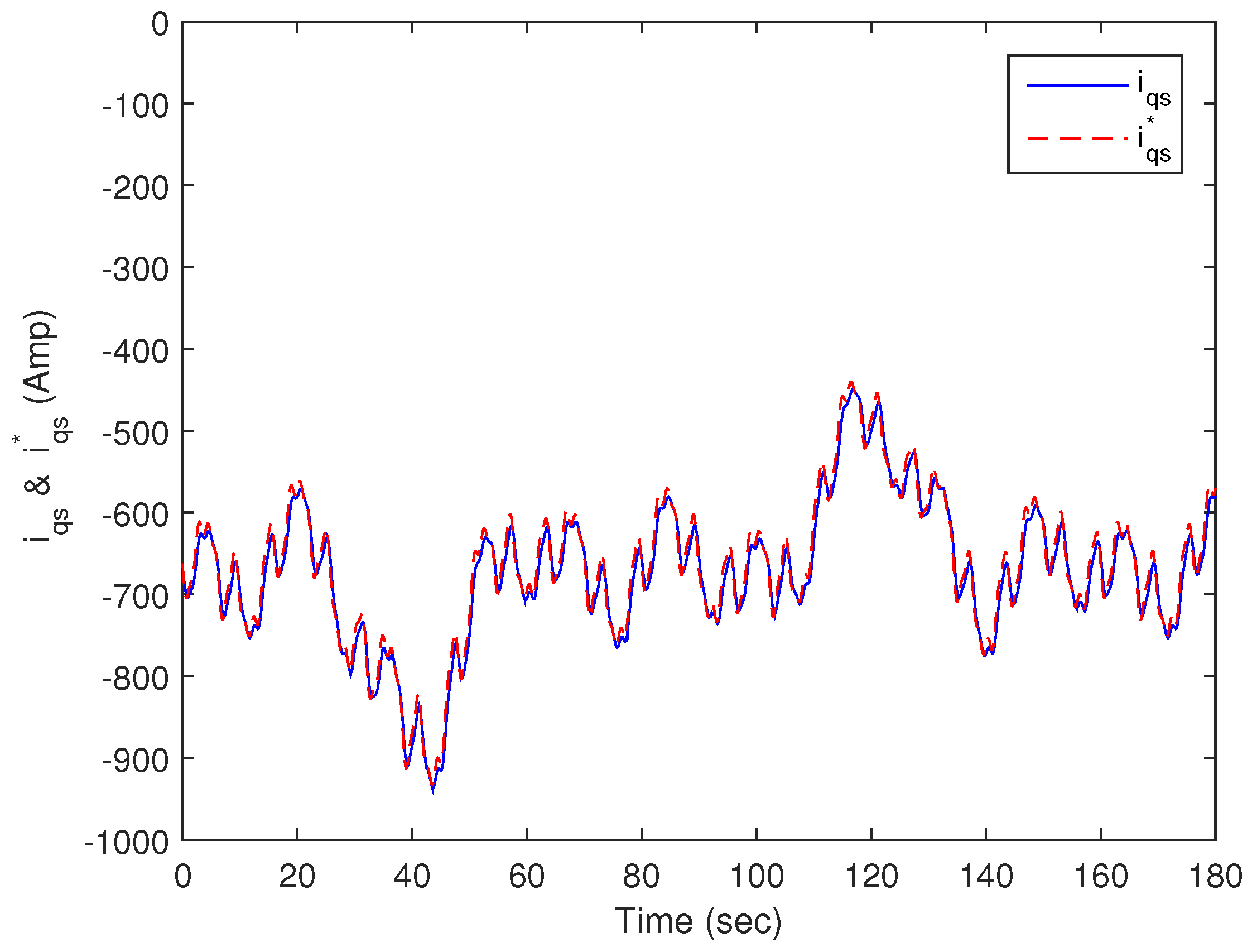
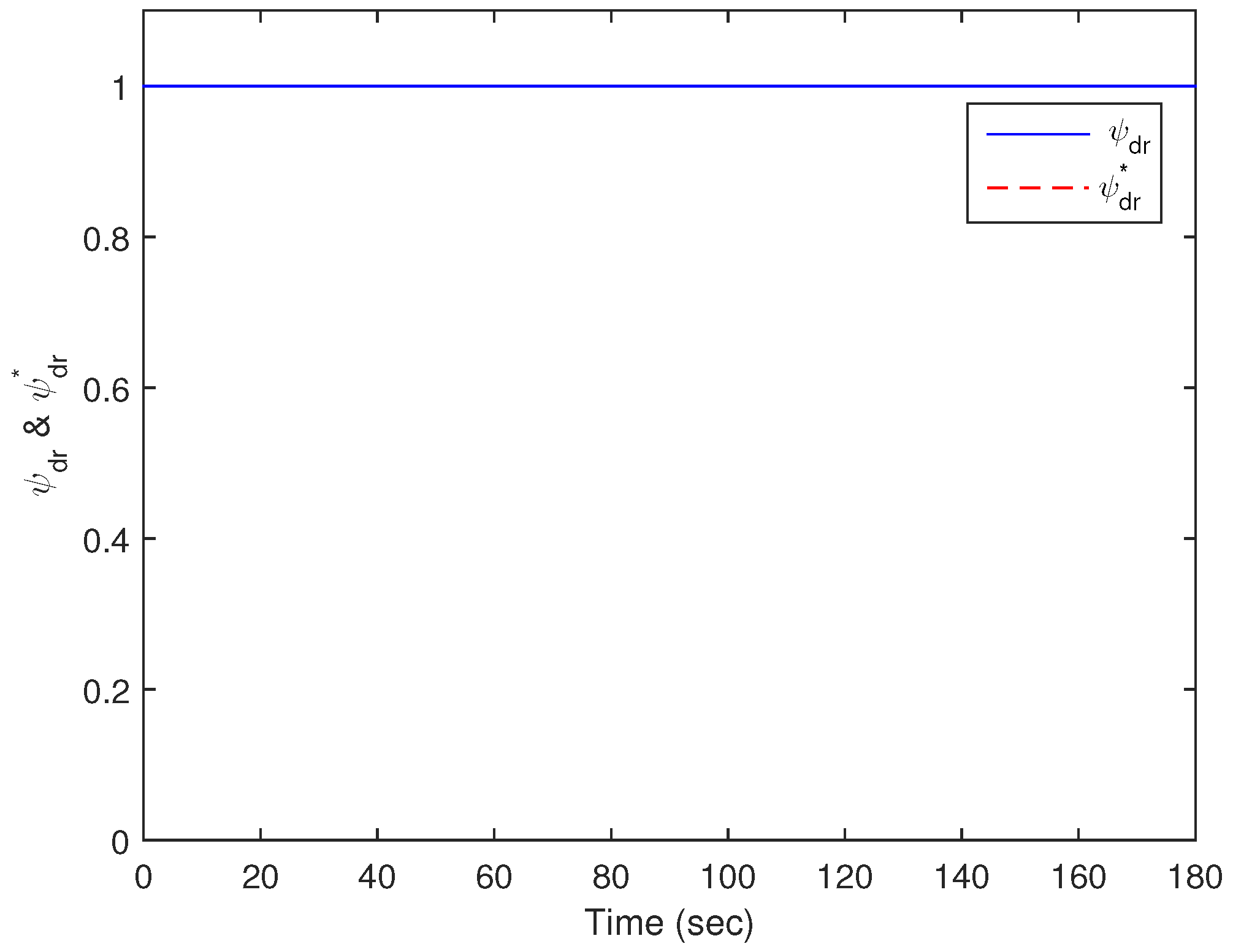
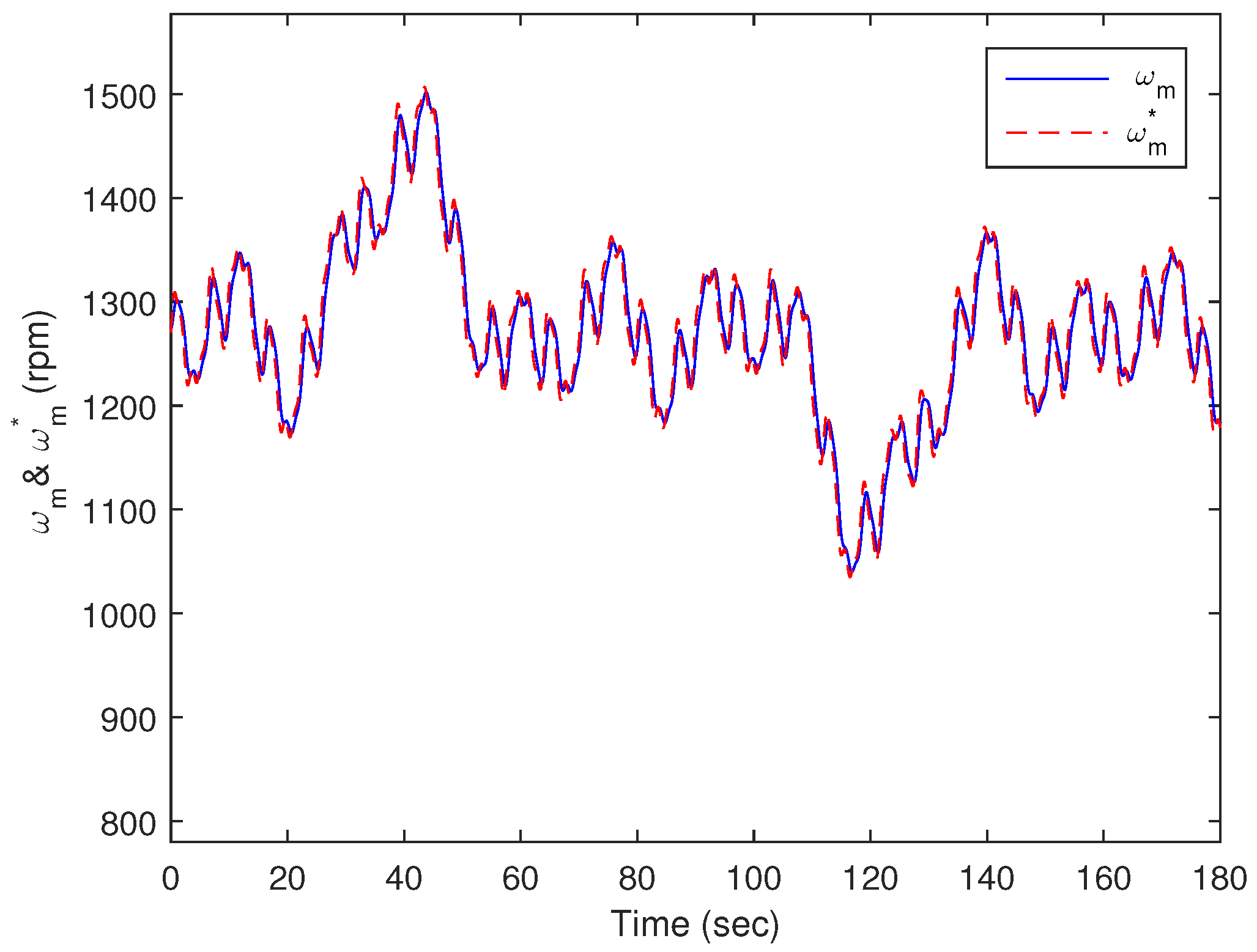
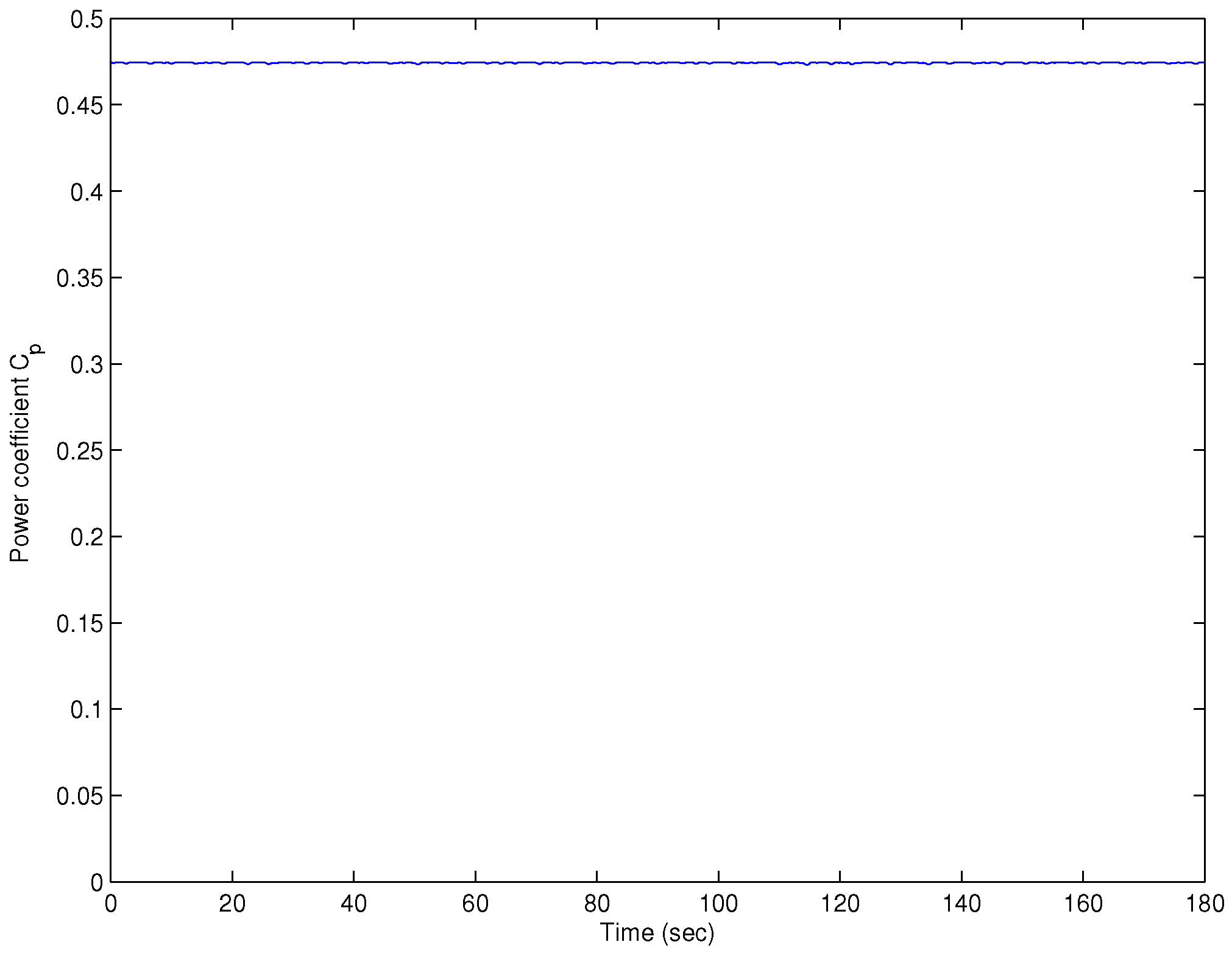
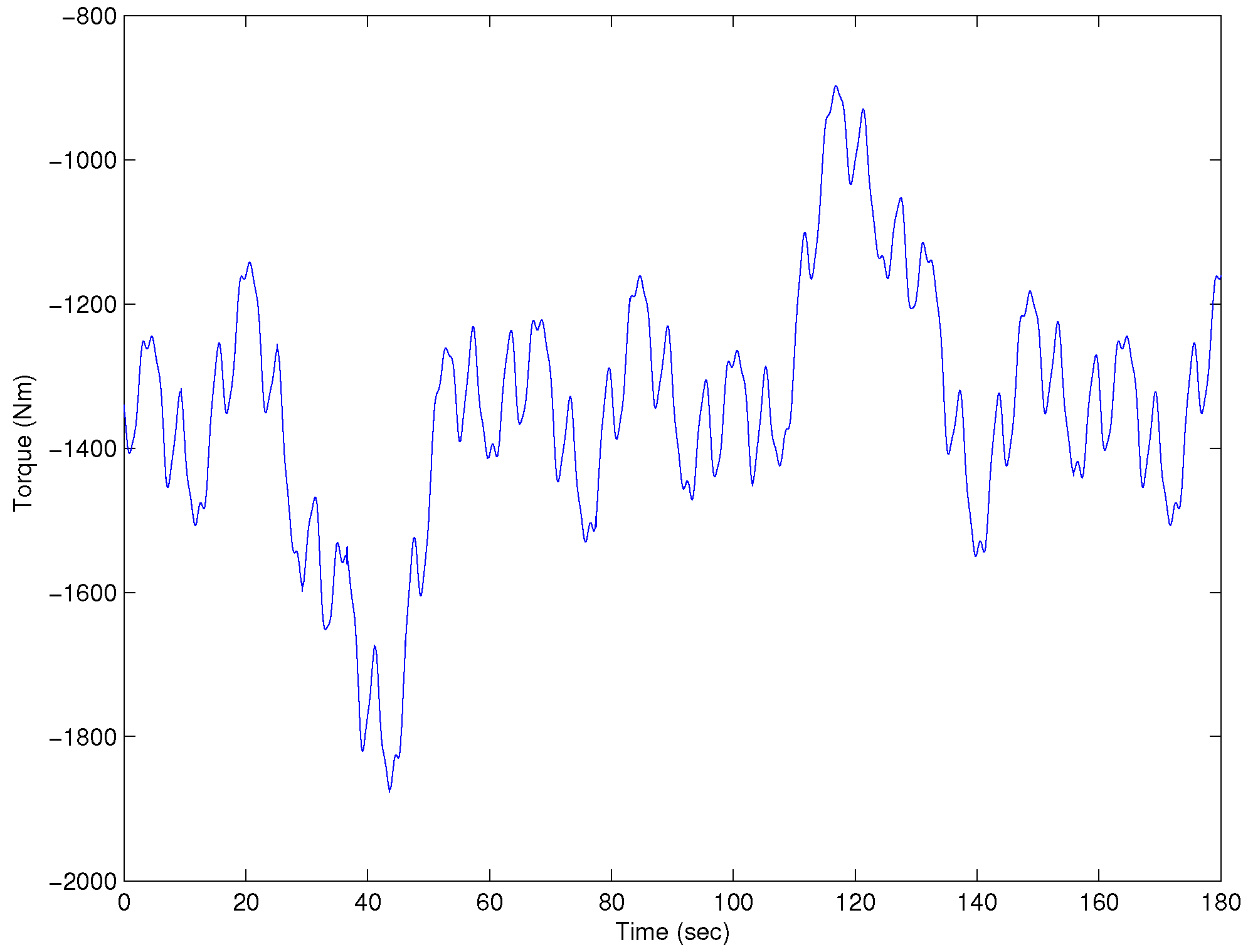
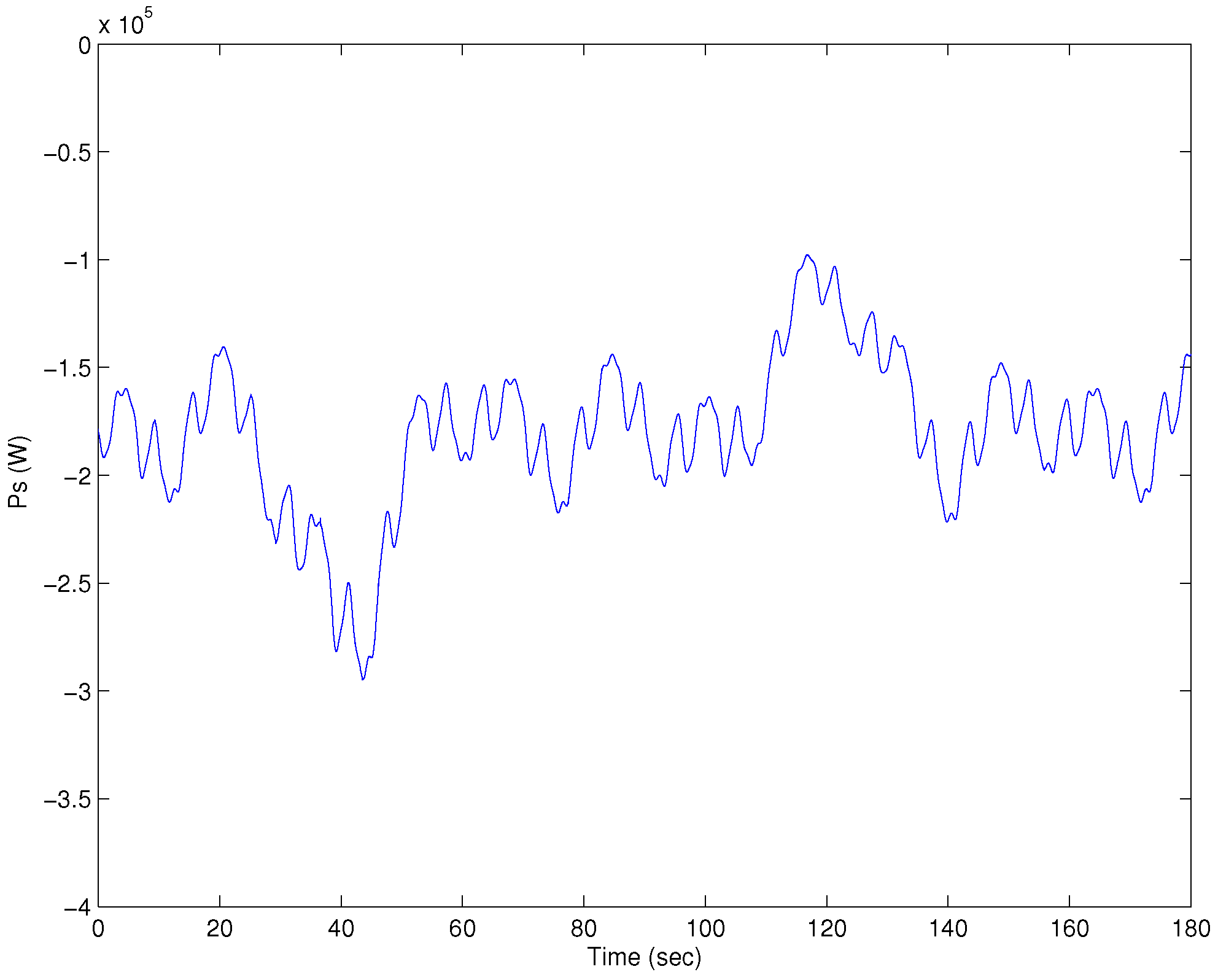
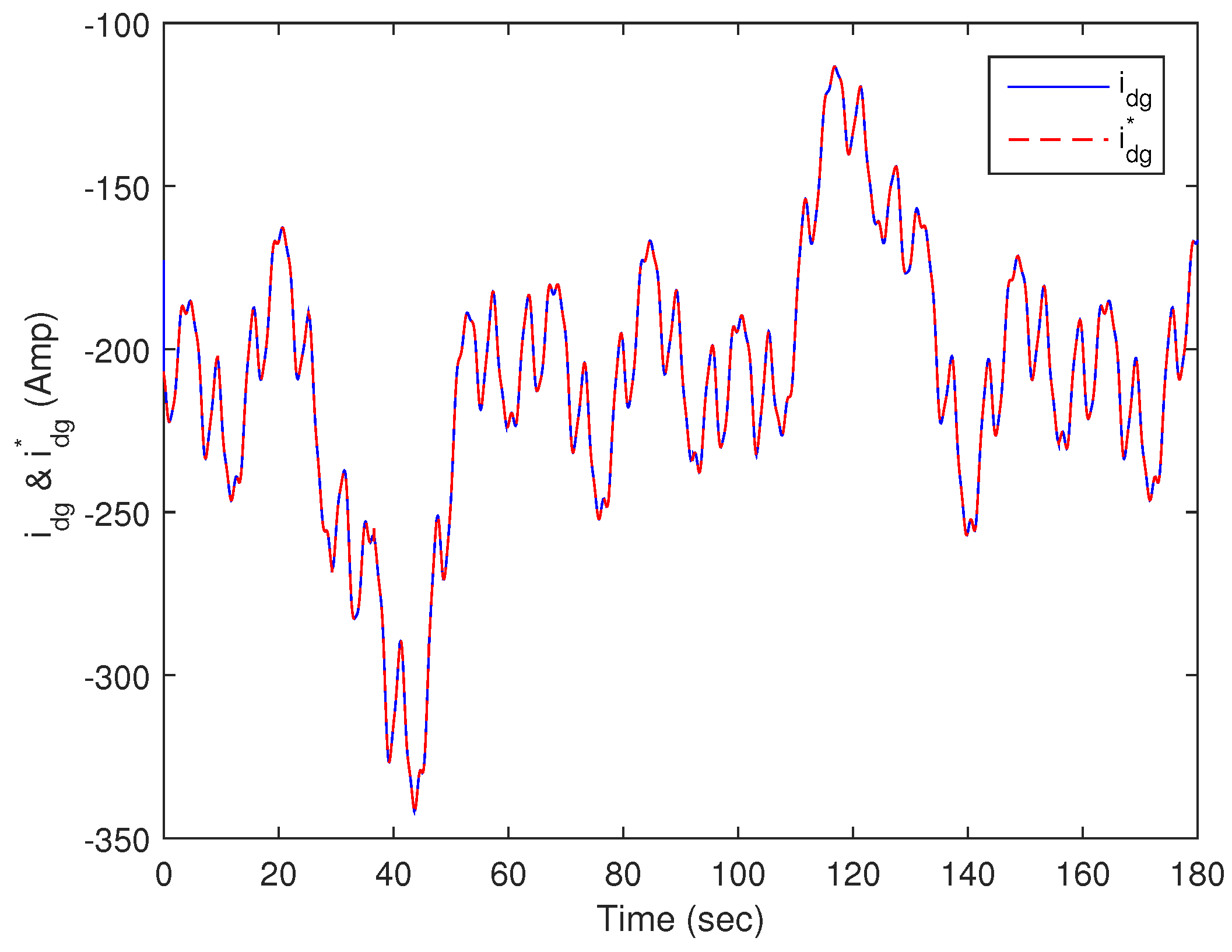
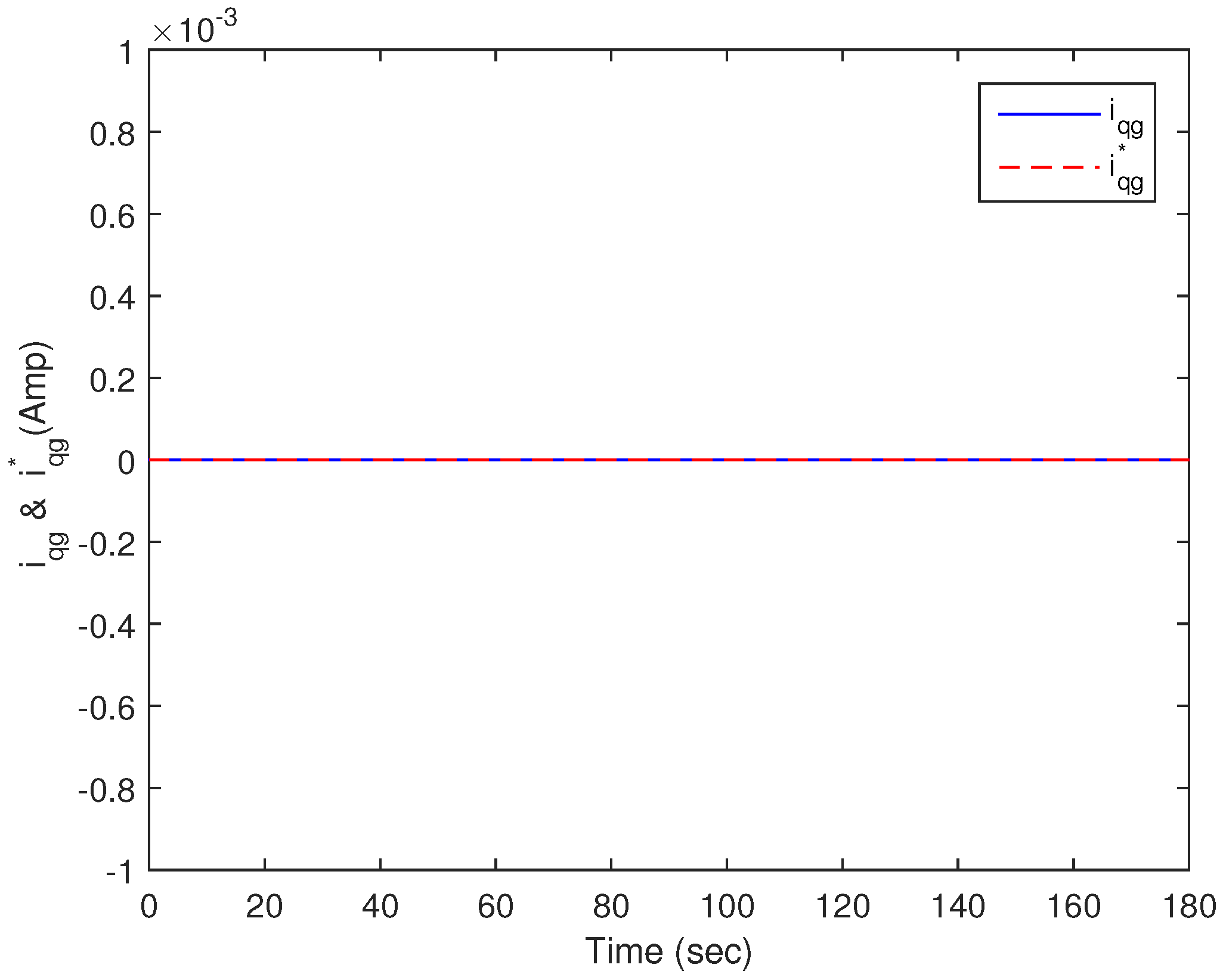
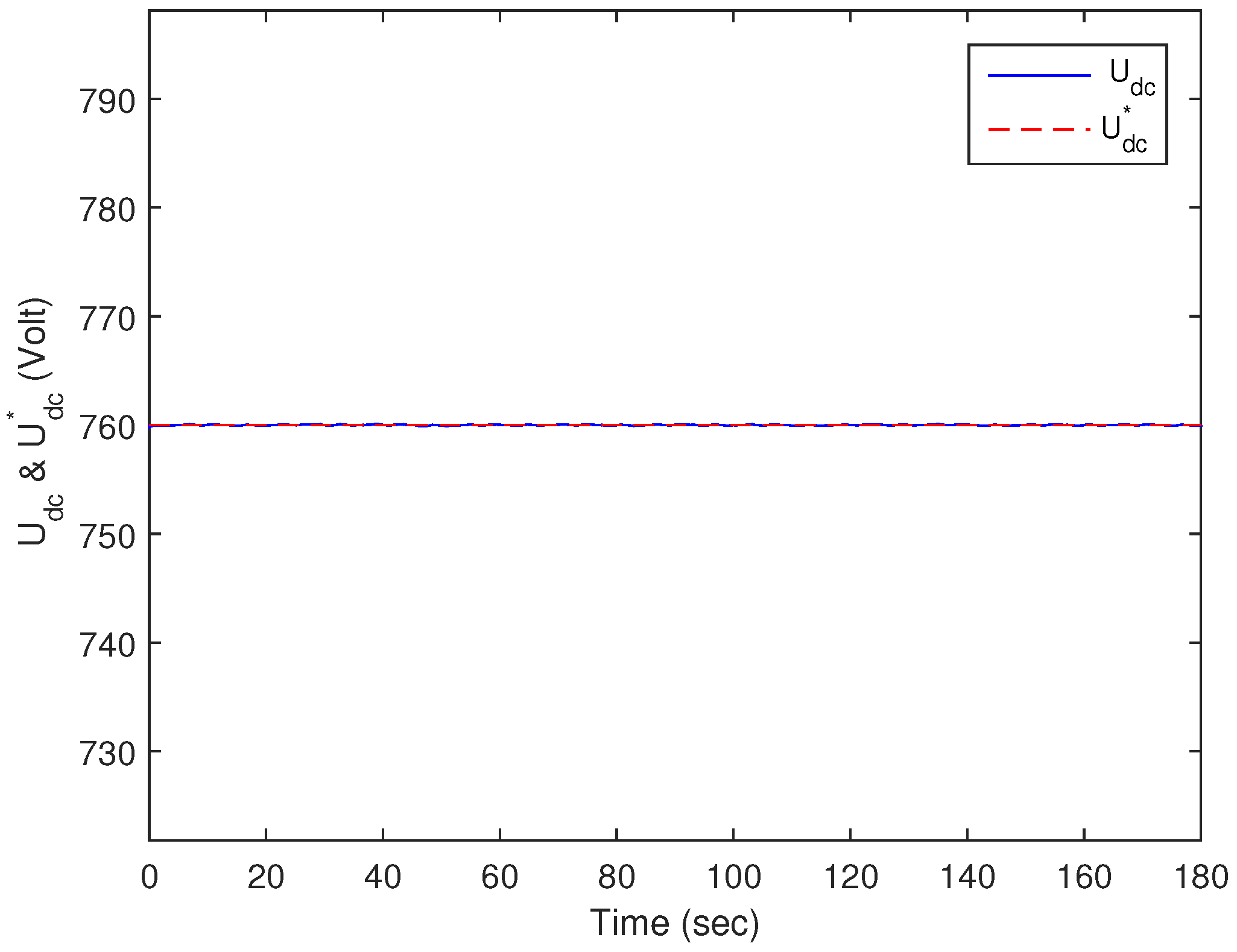
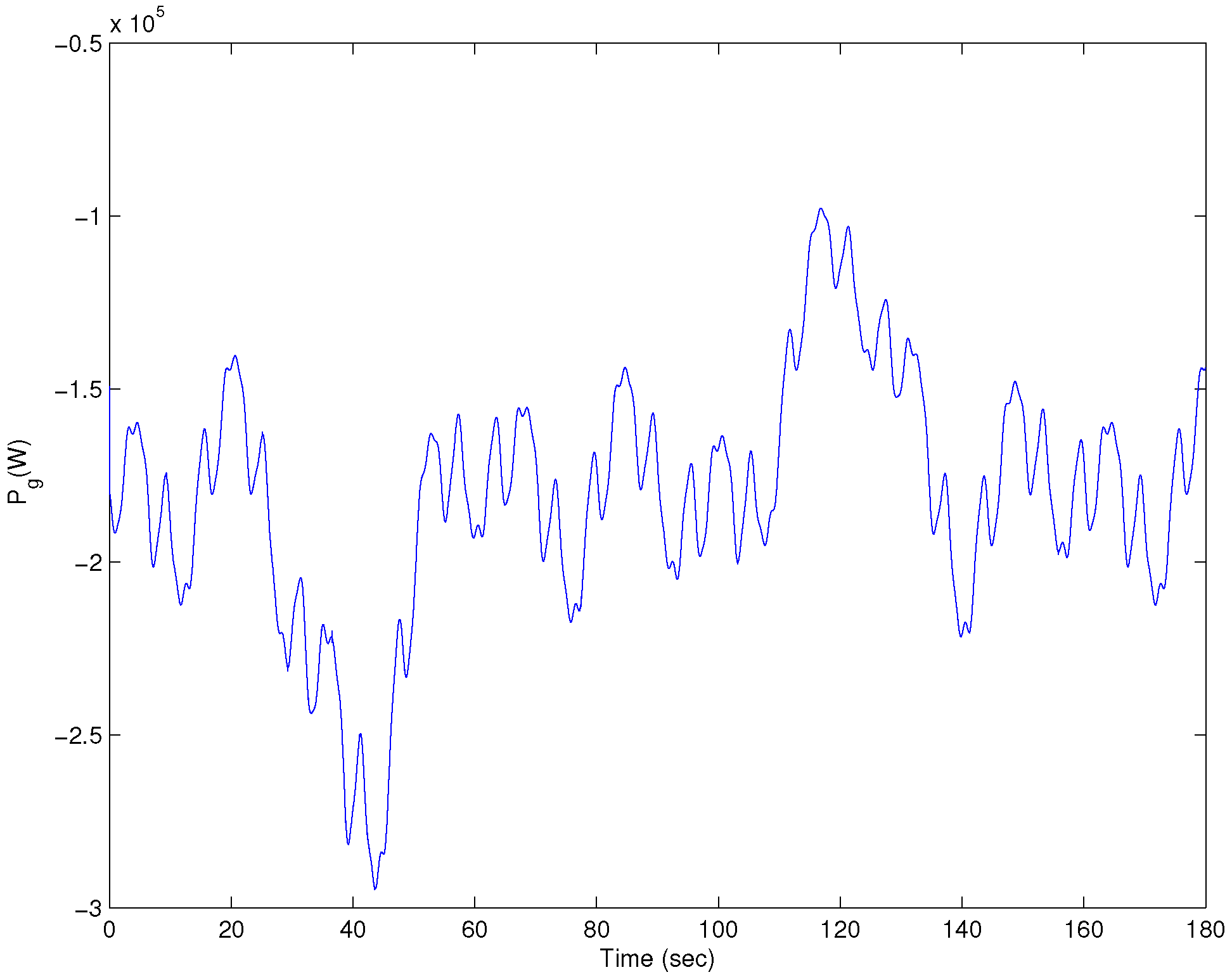
5. Simulation Results of the Proposed Sliding Mode Control Scheme
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Baloch, M.H.; Wang, J.; Kaloi, G.S. A Review of the State of the Art Control Techniques for Wind Energy Conversion System. Int. J. Renew. Energy Res. (IJRER) 2016, 6, 1276–1295. [Google Scholar]
- Li, H.; Chen, Z. Overview of Different wind generator systems and their comparisons. IET Renew. Power Gener. 2008, 2, 123–138. [Google Scholar] [CrossRef]
- Mahela, O.P.; Shaik, A.G. Comprehensive overview of grid interfaced wind energy generation systems. Renew. Sustain. Energy Rev. 2016, 57, 260–281. [Google Scholar] [CrossRef]
- Cheng, M.; Zhu, Y. The state of the art of wind energy conversion systems and technologies: A review. Energy Convers. Manag. 2014, 88, 332–347. [Google Scholar] [CrossRef]
- Chen, Z.; Guerrero, J.M.; Blaabjerg, F. A review of the state of the art of power electronics for wind turbines. IEEE Trans. Power Electron. 2009, 24, 1859–1875. [Google Scholar] [CrossRef]
- Nguyen, H.M.; Naidu, D.S. Evolution of wind turbine control systems. In Encyclopedia of Control Systems, Robotics, and Automation; EOLSS Publishers: Oxford, UK, 2010. [Google Scholar]
- Pao, L.Y.; Johnson, K.E. Control of wind turbines. IEEE Control Syst. 2011, 31, 44–62. [Google Scholar] [CrossRef]
- Babu, N.R.; Arulmozhivarman, P. Wind energy conversion systems-a technical review. J. Eng. Sci. Technol. 2013, 8, 493–507. [Google Scholar]
- Benchagra, M.; Errami, Y.; Hilal, M.; Maaroufi, M.; Cherkaoui, M.; Ouassaid, M. New control strategy for inductin generator-wind turbine connected grid. In Proceedings of the 2012 International Conference on Multimedia Computing and Systems (ICMCS), Tangiers, Morocco, 10–12 May 2012; pp. 1043–1048. [Google Scholar]
- Benchagra, M.; Hilal, M.; Errami, Y.; Ouassaid, M.; Maaroufi, M. Modeling and control of SCIG based variable-speed with power factor control. Int. Rev. Model. Simul. (IREMOS) 2011, 4, 1007–1014. [Google Scholar]
- Benchagra, M.; Maaroufi, M.; Ouassaid, M. A performance comparison of linear and nonlinear control o f a SCIG-wind farm connecting to a distribution network. Turk. J. Electr. Eng. Comput. Sci. 2014, 22, 1–11. [Google Scholar] [CrossRef]
- Benchagra, M.; Maaroufi, M. Control of wind farm connected distribution network. In Proceedings of the 10th IEEE International Conference on Networking, Sensing and Control (ICNSC), Evry, France, 10–12 April 2013; pp. 467–472. [Google Scholar]
- Benchagra, M.; Maaroufi, M.; Ouassaid, M. Nonlinear MPPT control of squirrel cage induction generator-wind turbine. J. Theor. Appl. Inf. Technol. 2012, 35, 26–33. [Google Scholar]
- Wang, P.; Wang, H.; Cai, X.; Han, Z. Passivity-based robust controller design for a variable speed wind energy conversion system. Turk. J. Electr. Eng. Comput. Sci. 2016, 24, 558–570. [Google Scholar] [CrossRef]
- Hassan, A. Nonlinear Control of Variable wind Speed Conversion System Based on a Squirrel Cage Induction Generator (SCIG). Am. J. Eng. Appl. Sci. 2015, 8, 275–284. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, Q.; Rasmussen, C.N.; Blanke, M. calL1 Adaptive Speed Control of a Small Wind Energy Conversion System for Maximum Power Point Tracking. IEEE Trans. Energy Convers. 2014, 29, 576–584. [Google Scholar] [CrossRef]
- Heydari-doostabad, H.; Khalghani, M.R.; Khooban, M.H. A novel control system design to improve LVRT capability of fixed speed wind turbines using STATCOM in presence of voltage fault. Int. J. Electr. Power Energy Syst. 2016, 77, 280–286. [Google Scholar] [CrossRef]
- Baloch, M.H.; Wang, J.; Kaloi, G.S. Stability and nonlinear controller analysis of wind energy conversion system with random wind speed. Int. J. Electr. Power Energy Syst. 2016, 79, 75–83. [Google Scholar] [CrossRef]
- Domínguez-García, J.L.; Gomis-Bellmunt, O.; Trilla-Romero, L.; Junyent-Ferré, A. Indirect vector control of a squirrel cage induction generator wind turbine. Comput. Math. Appl. 2012, 64, 102–114. [Google Scholar] [CrossRef]
- Ouassaid, M.; Elyaalaoui, K.; Cherkaoui, M. Sliding Mode Control of Induction Generator Wind Turbine Connected to the Grid. In Advances and Applications in Nonlinear Control Systems; Springer International Publishing: New York, NY, USA, 2016; pp. 531–553. [Google Scholar]
- Amimeur, H.; Aouzellag, D.; Abdessemed, R.; Ghedamsi, K. Sliding mode control of a dual-stator induction generator for wind energy conversion systems. Int. J. Electr. Power Energy Syst. 2012, 42, 60–70. [Google Scholar] [CrossRef]
- De Battista, H.; Mantz, R.J.; Christiansen, C.F. Dynamical sliding mode power control of wind driven induction generators. IEEE Trans. Energy Convers. 2010, 15, 451–457. [Google Scholar] [CrossRef]
- Mi, Y.; Bao, X.; Yang, Y.; Zhang, H.; Wang, P. The sliding mode pitch angle controller design for squirrel-cage induction generator wind power generation system. In Proceedings of the 33rd Chinese Control Conference (CCC), Nanjing, China, 28–30 July 2014; pp. 8113–8117. [Google Scholar]
- Beltran, B.; Ahmed-Ali, T.; Benbouzid, M.E. High-order sliding-mode control of variable-speed wind turbines. IEEE Trans. Ind. Electron. 2009, 56, 3314–3321. [Google Scholar] [CrossRef]
- Leon, A.E.; Farias, M.F.; Battaiotto, P.E.; Solsona, J.A.; Valla, M.I. Control strategy of a DVR to improve stability in wind farms using squirrel-cage induction generators. IEEE Trans. Power Syst. 2011, 26, 1609–1617. [Google Scholar] [CrossRef]
- Senjyu, T.; Ochi, Y.; Muhando, E.; Urasaki, N.; Sekine, H. Speed and position sensor-less maximum power point tracking control for wind generation system with squirrel cage induction generator. In Proceedings of the 2006 IEEE PES Power Systems Conference and Exposition, Atlanta, GA, USA, 29 October–1 November 2006; pp. 2038–2043. [Google Scholar]
- Senjyu, T.; Ochi, Y.; Kikunaga, Y.; Tokudome, M.; Yona, A.; Muhando, E.B.; Urasaki, N.; Funabashi, T. Sensor-less maximum power point tracking control for wind generation system with squirrel cage induction generator. Renew. Energy 2009, 34, 994–999. [Google Scholar] [CrossRef]
- Faiz, J. Design and Implementation of a Solid-state Controller for Regulation of Output Voltage of a Wind-driven Self-excited three-phase Squirrel-cage Induction Generator. In Proceedings of the International Conference on Electrical Machines and Systems, Nanjing, China, 27–29 September 2005. [Google Scholar]
- Duong, M.Q.; Grimaccia, F.; Leva, S.; Mussetta, M.; Ogliari, E. Pitch angle control using hybrid controller for all operating regions of SCIG wind turbine system. Renew. Energy 2014, 70, 197–203. [Google Scholar] [CrossRef]
- Duong, M.Q.; Grimaccia, F.; Leva, S.; Mussetta, M.; Le, K.H. Improving transient stability in a grid-connected squirrel-cage induction generator wind turbine system using a fuzzy logic controller. Energies 2015, 8, 6328–6349. [Google Scholar] [CrossRef]
- Xu, P.; Shi, K.; Bu, F.; Zhao, D.; Fang, Z.; Liu, R.; Zhu, Y. A Vertical-Axis Off-Grid Squirrel-Cage Induction Generator Wind Power System. Energies 2016, 9, 822. [Google Scholar] [CrossRef]
- Pena, R.; Clare, J.C.; Asher, G.M. Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation. IEE Proc.-Electr. Power Appl. 1996, 143, 231–241. [Google Scholar] [CrossRef]
- Alrifai, M.; Zribi, M.; Rayan, M. Feedback Linearization Controller for a Wind Energy Power System. Energies 2016, 9, 771. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| The rated power | 300 KW |
| The rated apparent power | 300 KVA |
| The rated voltage (line to line) | 575 v |
| The frequency/angular speed | rad/s |
| The nominal frequency of the system | 50 Hz |
| The resistance of the stator | |
| The leakage inductance of the stator | 11.8 mH |
| The resistance of the rotor | |
| The leakage inductance of the rotor | 11.6 mH |
| The magnetizing inductance | 11.6 mH |
| The capacitor of the DC bus | 20 mF |
| The rated voltage of the DC bus | 760 v |
| The grid resistance | |
| The grid leakage inductance | 0.6 mH |
| The inertia of the generator | 10.0 kg m |
| The number of pole pairs | 2 |
| The rated generator speed | 158.7 rad/s |
| The rotor diameter of the wind turbine | 14 m |
| The density of air | 1.22 kg/m |
| The rated wind speed | 12 m/s |
| The rated rotor speed | 19.7 rpm |
| The gearbox ratio | 23 |
| The inertia of the turbine | 50.0 kg m |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zribi, M.; Alrifai, M.; Rayan, M. Sliding Mode Control of a Variable- Speed Wind Energy Conversion System Using a Squirrel Cage Induction Generator. Energies 2017, 10, 604. https://doi.org/10.3390/en10050604
Zribi M, Alrifai M, Rayan M. Sliding Mode Control of a Variable- Speed Wind Energy Conversion System Using a Squirrel Cage Induction Generator. Energies. 2017; 10(5):604. https://doi.org/10.3390/en10050604
Chicago/Turabian StyleZribi, Mohamed, Muthana Alrifai, and Mohamed Rayan. 2017. "Sliding Mode Control of a Variable- Speed Wind Energy Conversion System Using a Squirrel Cage Induction Generator" Energies 10, no. 5: 604. https://doi.org/10.3390/en10050604
APA StyleZribi, M., Alrifai, M., & Rayan, M. (2017). Sliding Mode Control of a Variable- Speed Wind Energy Conversion System Using a Squirrel Cage Induction Generator. Energies, 10(5), 604. https://doi.org/10.3390/en10050604