
Wide Area Information-Based Transmission System Centralized Out-of-Step Protection Scheme




Abstract
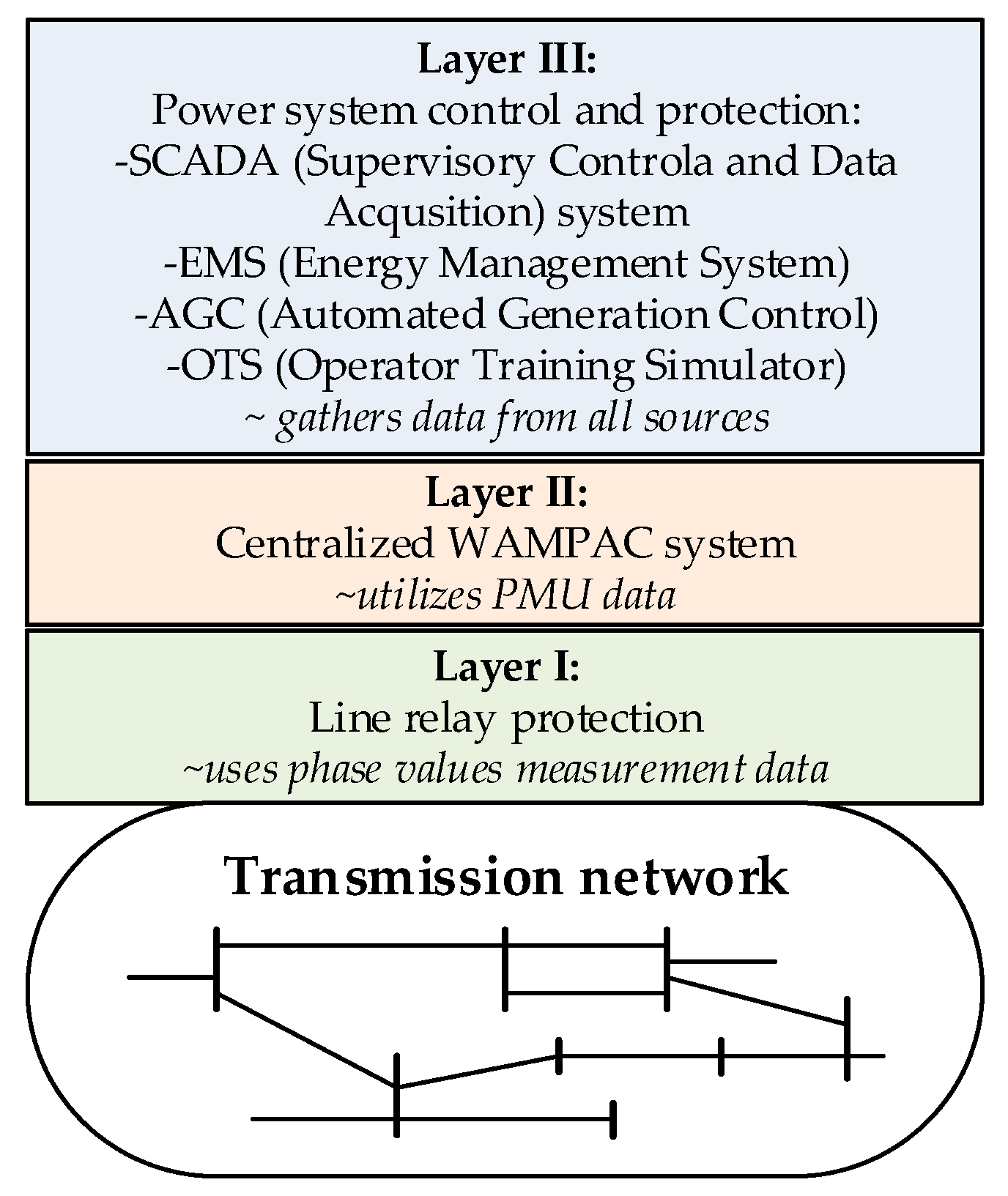
:1. Introduction
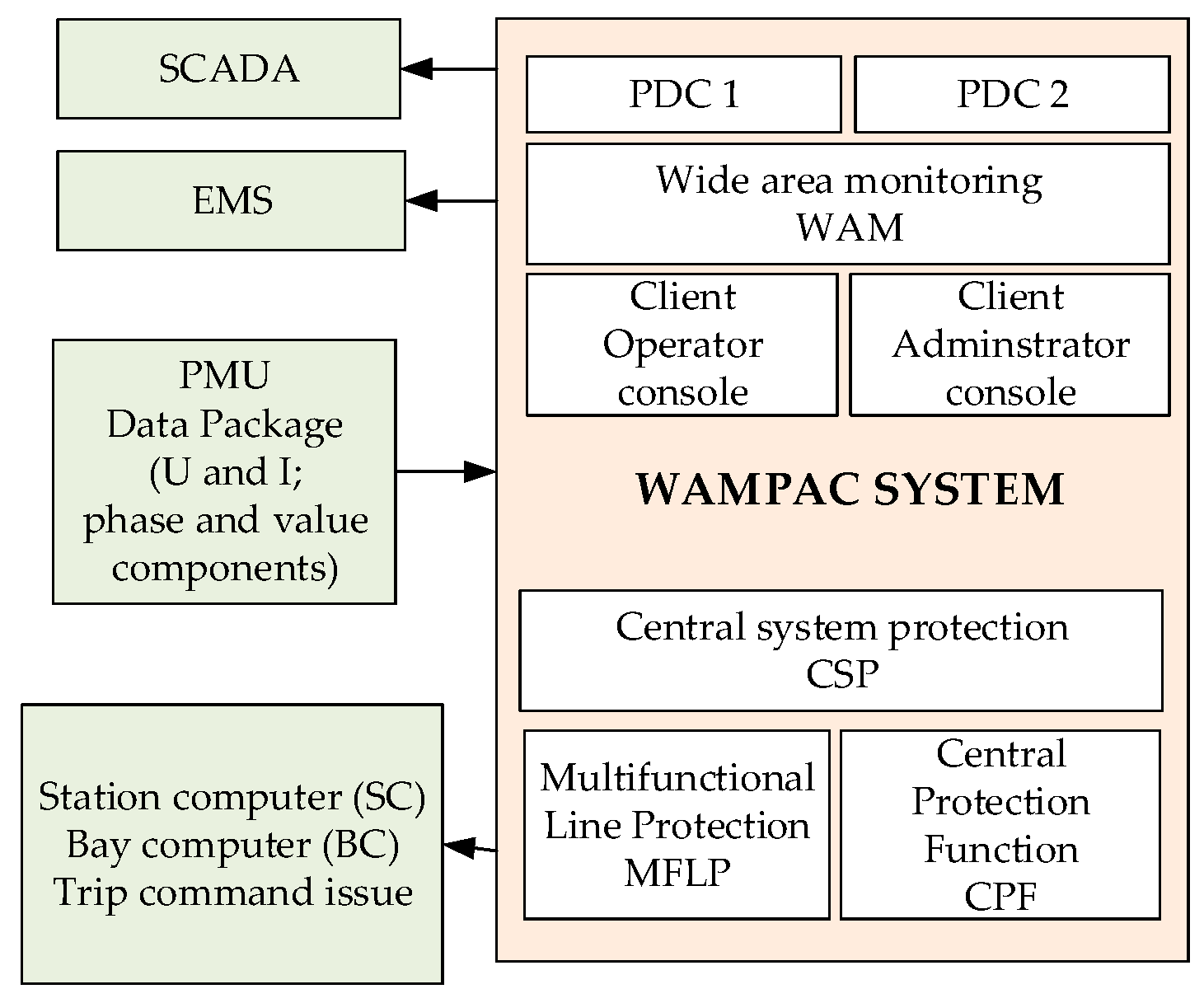
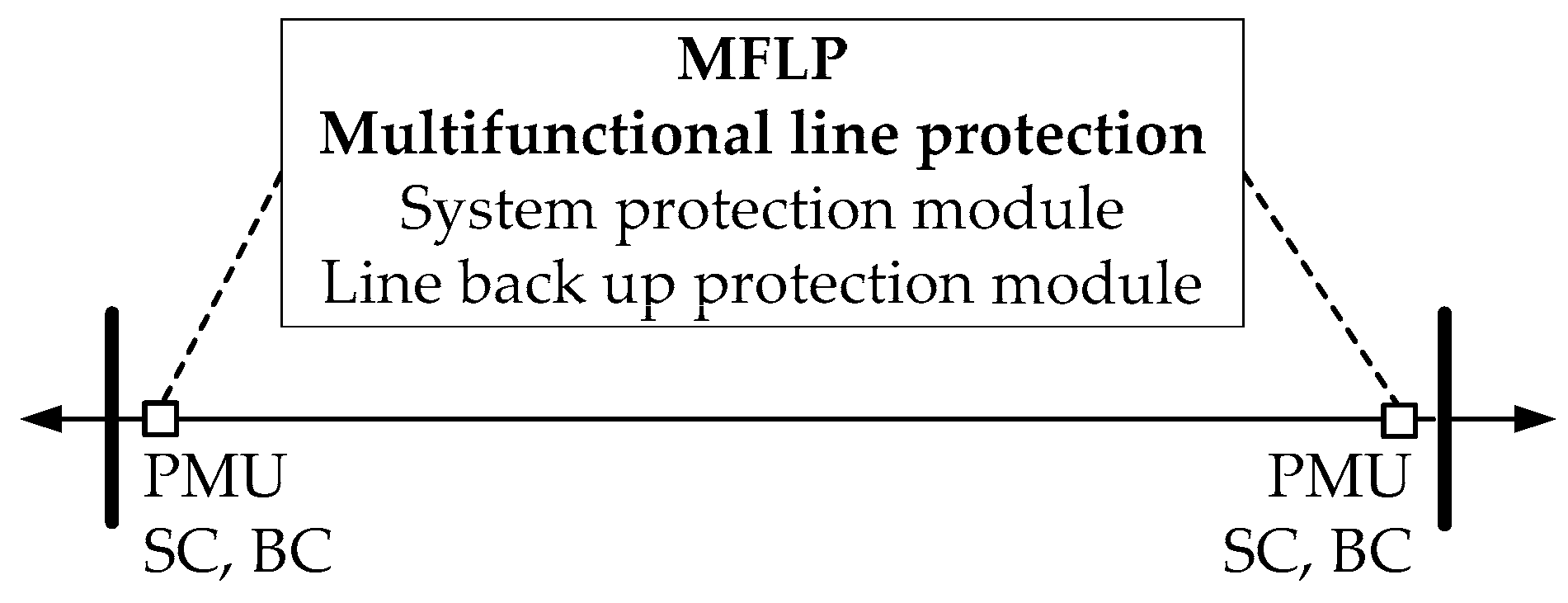
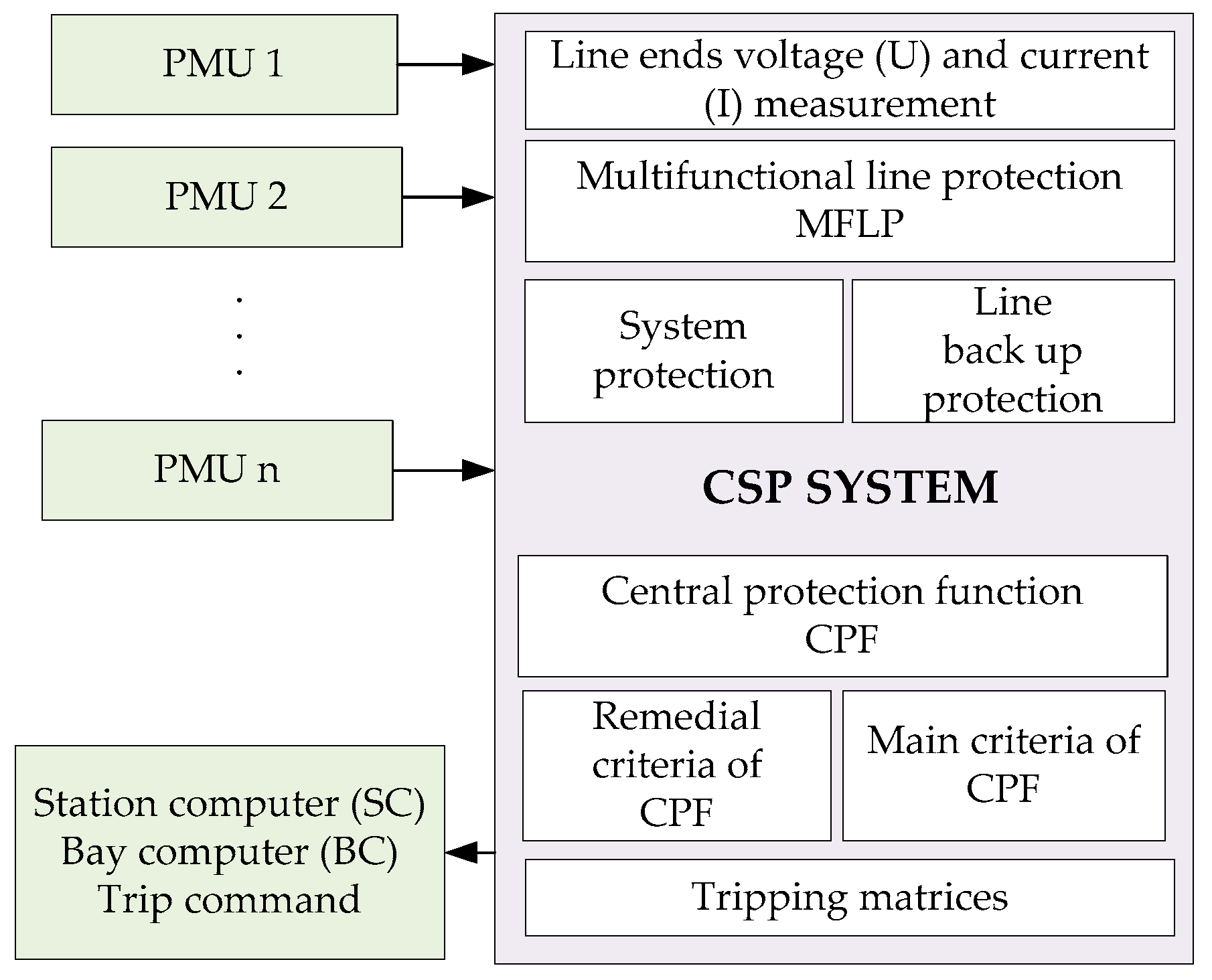
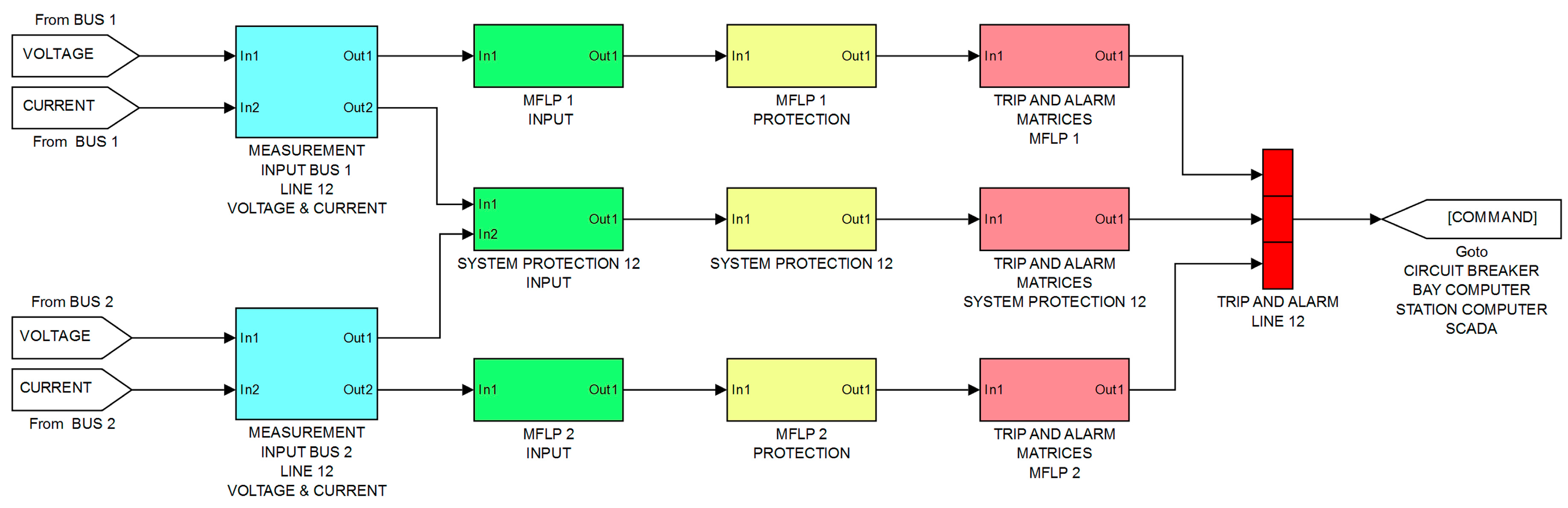
2. Multifunctional Line Protection
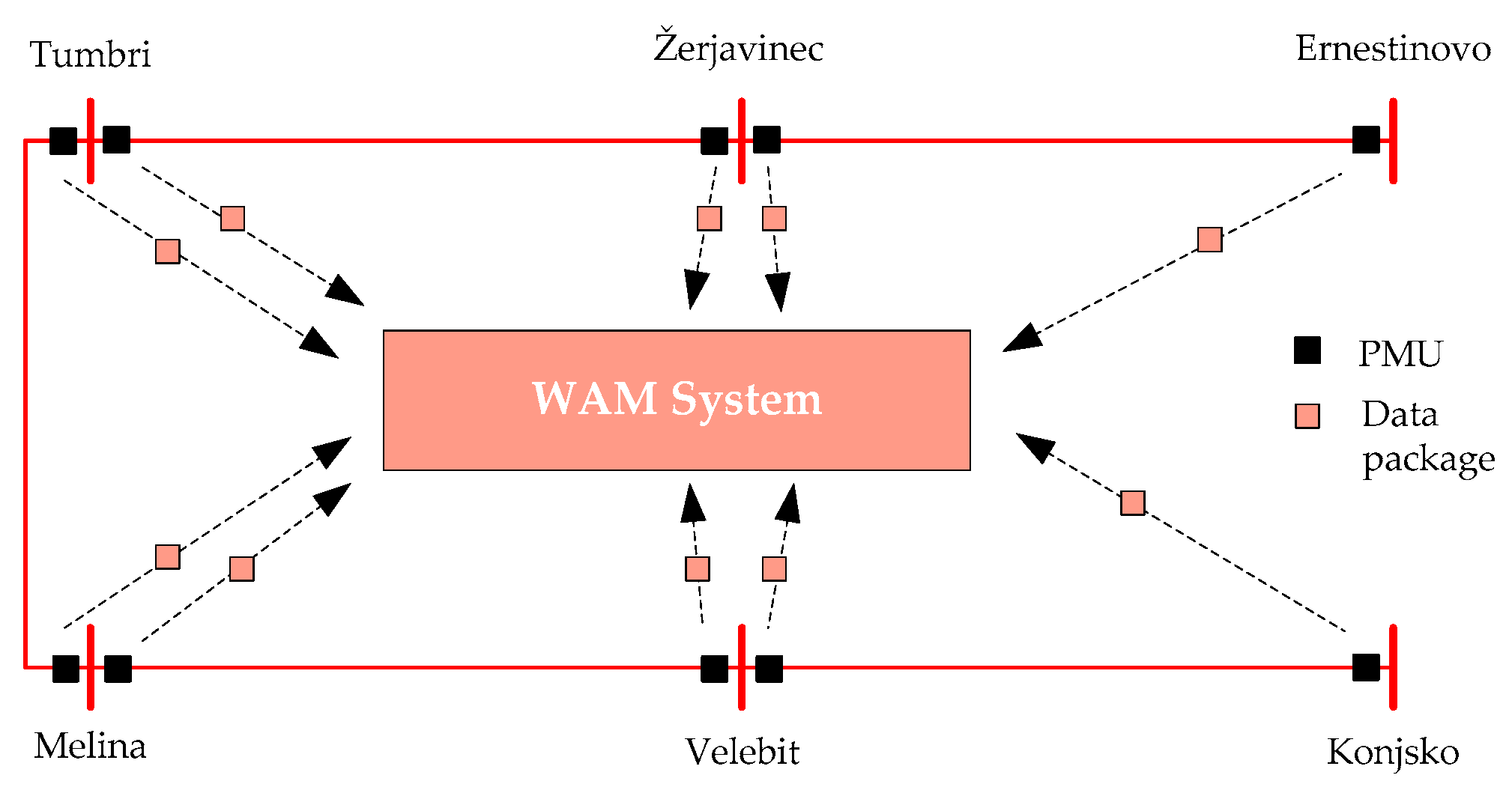
2.1. MFLP Functions in WAMPAC System
- (1)
- Normal operating condition in the transmission network tracing the execution of the day-ahead plans cycle (24 h ahead). Network operation footprint will be traced and all line breaker switching operations will be recognized in accordance with the plan [34,35]. All critical system values are monitored.
- (2)
- Short circuit conditions in the wider transmission network are monitored and recognized in line back up protection functions. Selectivity criteria help locate the exact position of short circuit faults. Circuit breaker tripping criteria are generated based on the gathered data.
- (3)
- Power swing conditions in transmission network with the available measurements can be recognized with the availability of the right data. In those circumstances an alarm is generated and if needed circuit breaker switching/tripping must be carried out to prevent more serious consequences.
- (4)
- If the system is about to reach out-of-step conditions these are also recognized in time and the transmission network is again separated in order to prevent more serious consequences.
2.2. Protection Criteria
2.3. System Protection Algotithm
2.4. Line Back-Up Protection Algorithm
2.5. Disturbance Origin Direction in Transmission Network
2.6. Equivalent System Inertia Observed from Single Transmission Line
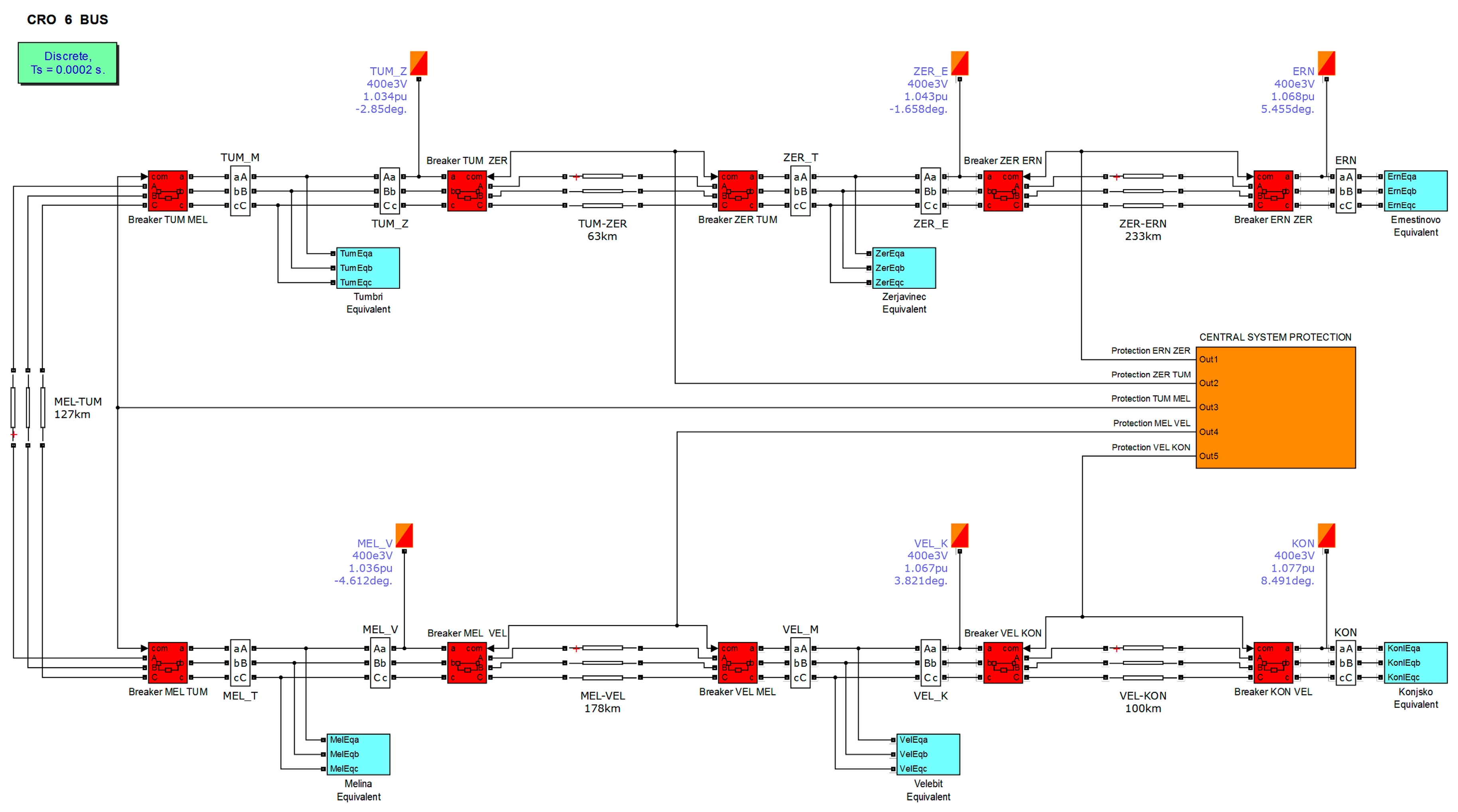
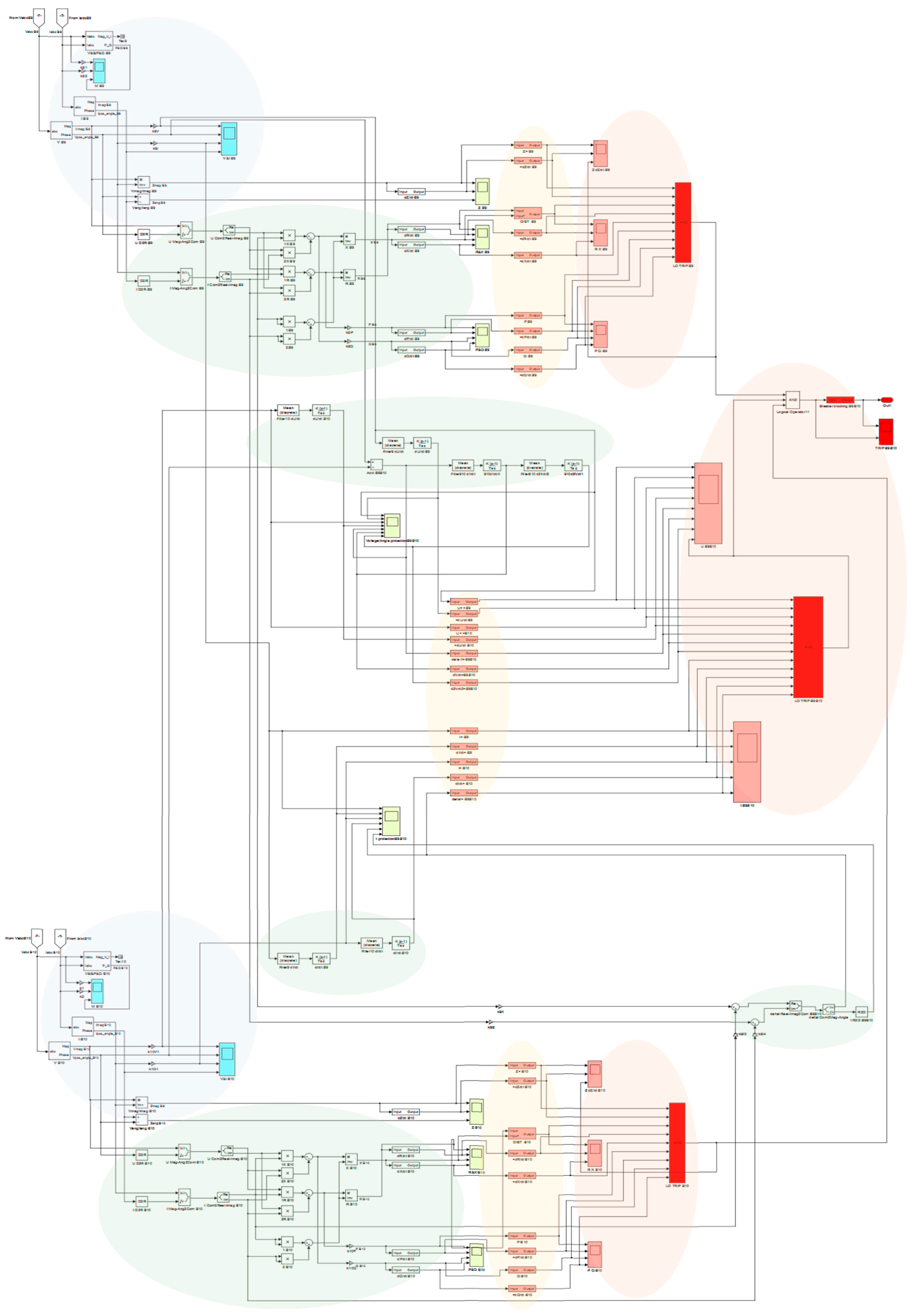
3. Transmission Network and System Protection Model
- Inclusion of a three phase transmission network model;
- Implementation of power flow functionality with basic and intermediate characteristics;
- Adaptation of a simulations time domain of milliseconds;
- Simulation of line single phase short circuit faults;
- Capability for creation of different system disturbances;
- Design capability to create different protection functions.
4. Protection Function Responses
4.1. Normal Operating Condition in Transmission Network
4.2. Short Circuit Conditions on Transmission Lines
- (1)
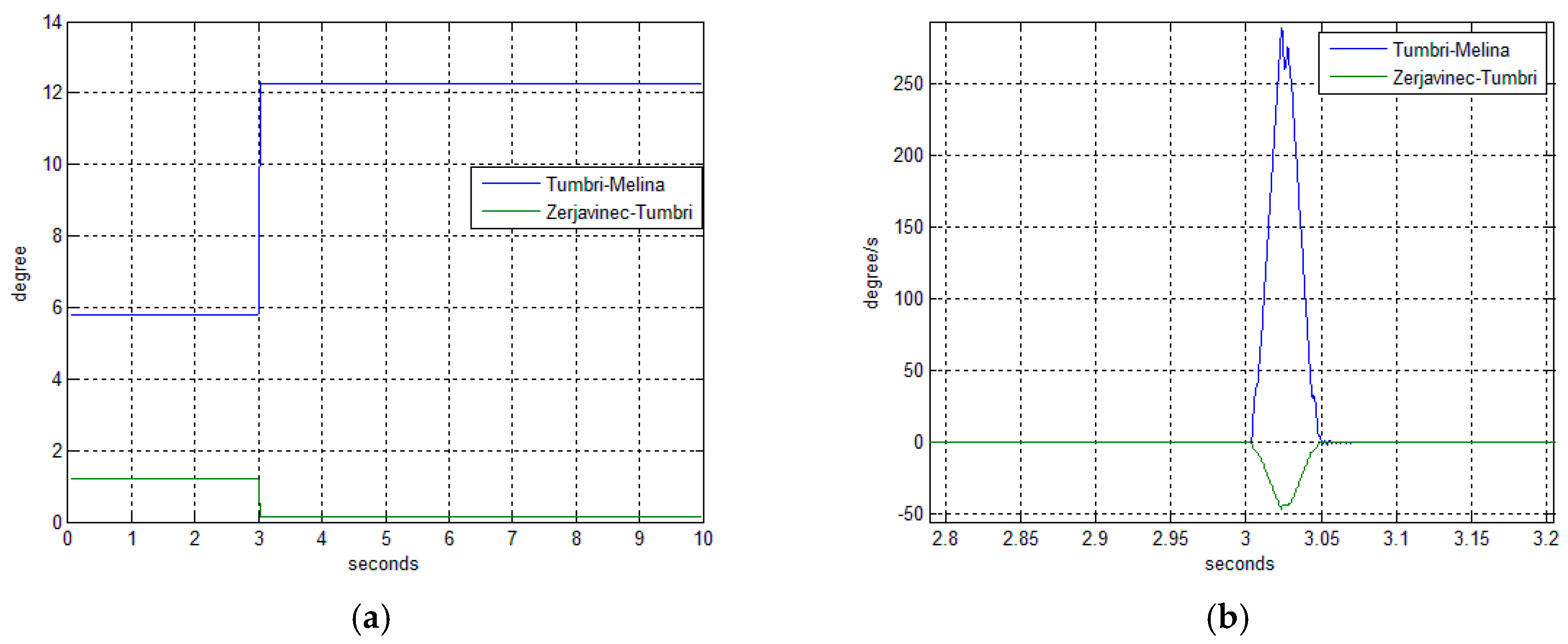
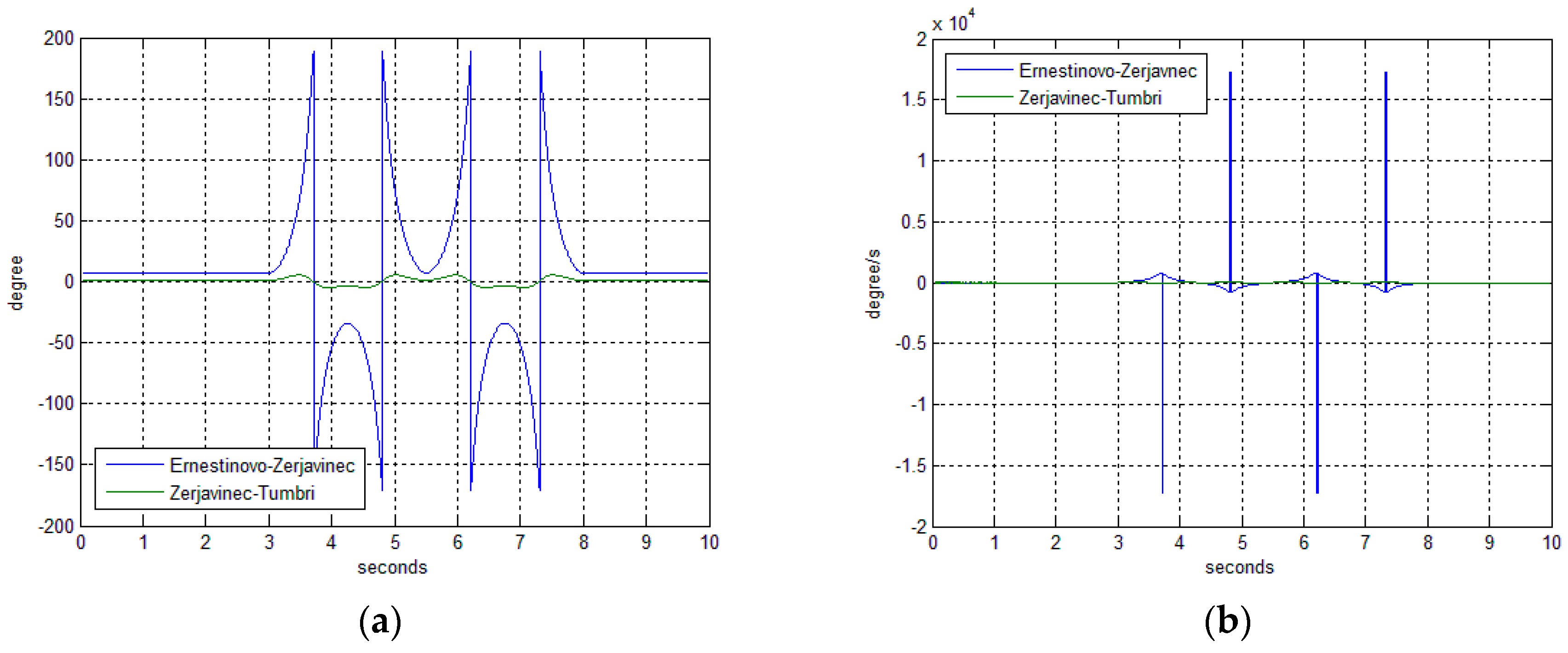
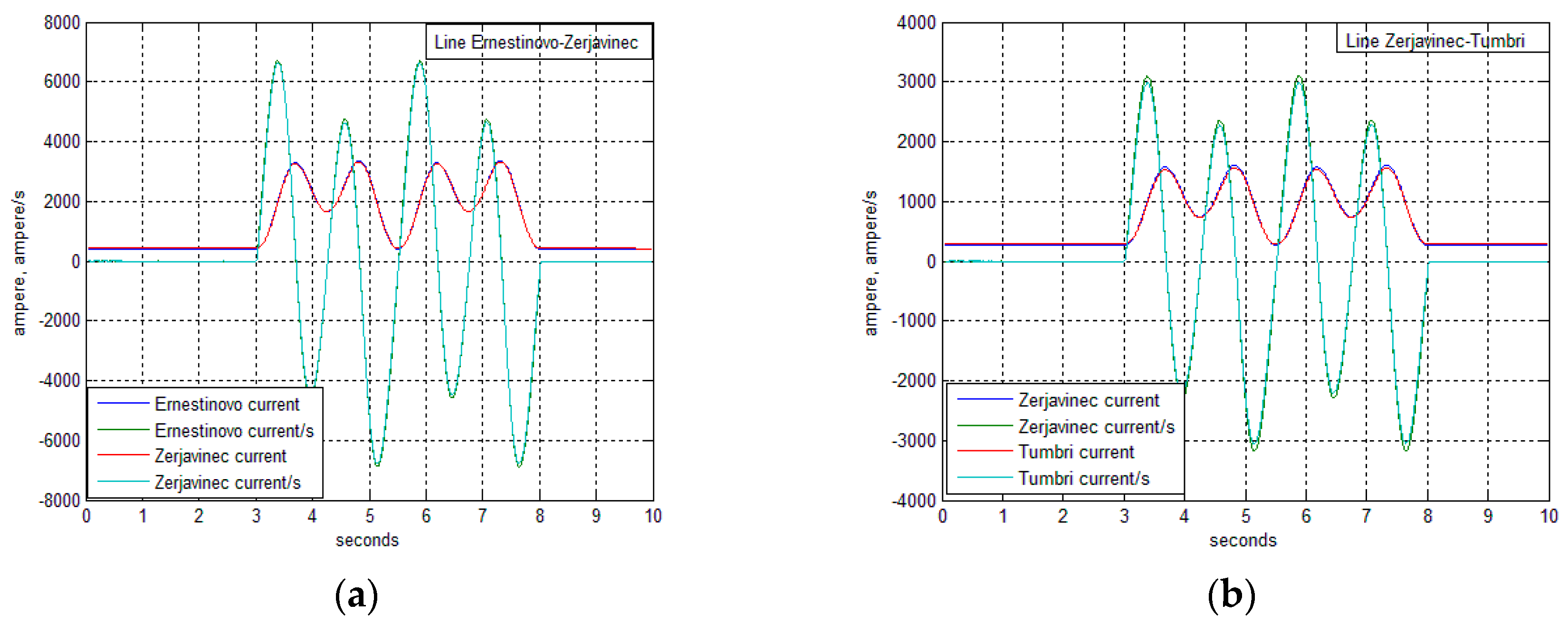
- The indication of location where the fault occurs only based on angles values points to the fact that the DO is near the Tumbri substation (according to Equation (23)).
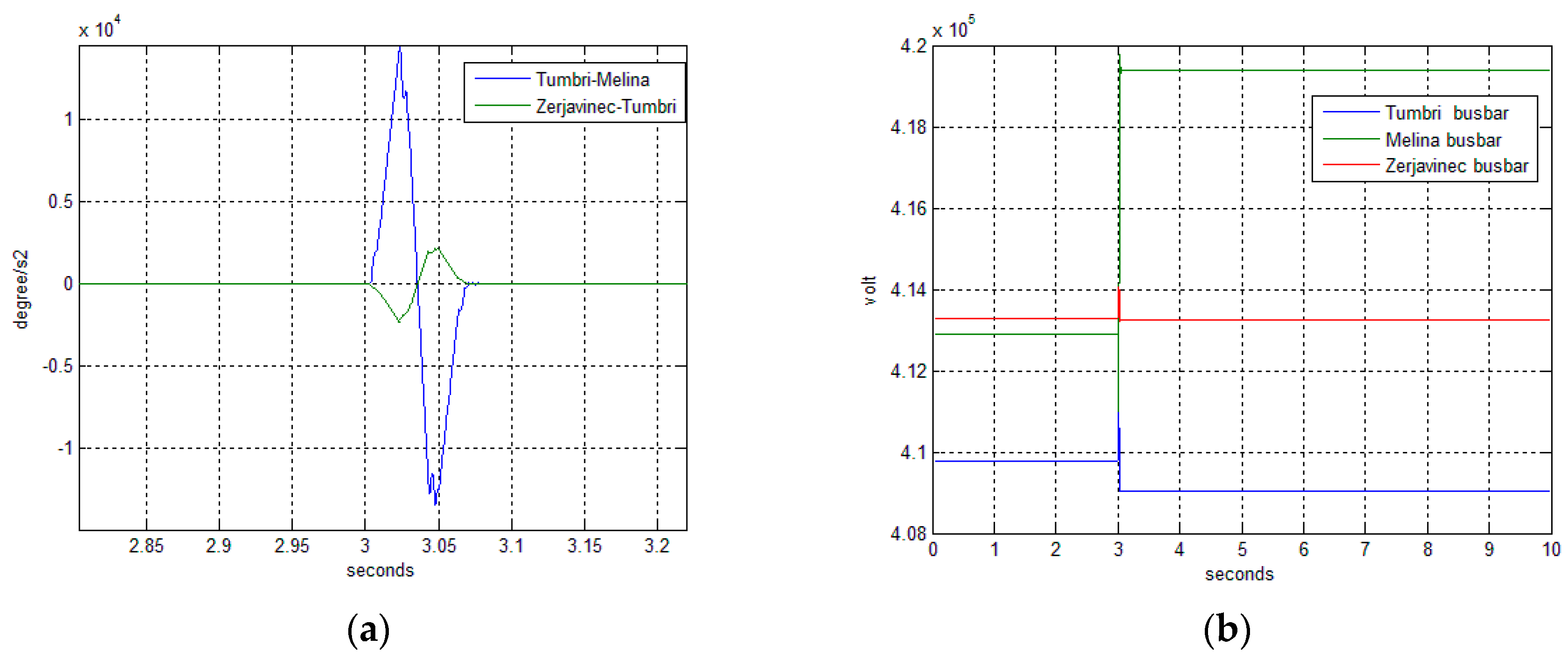
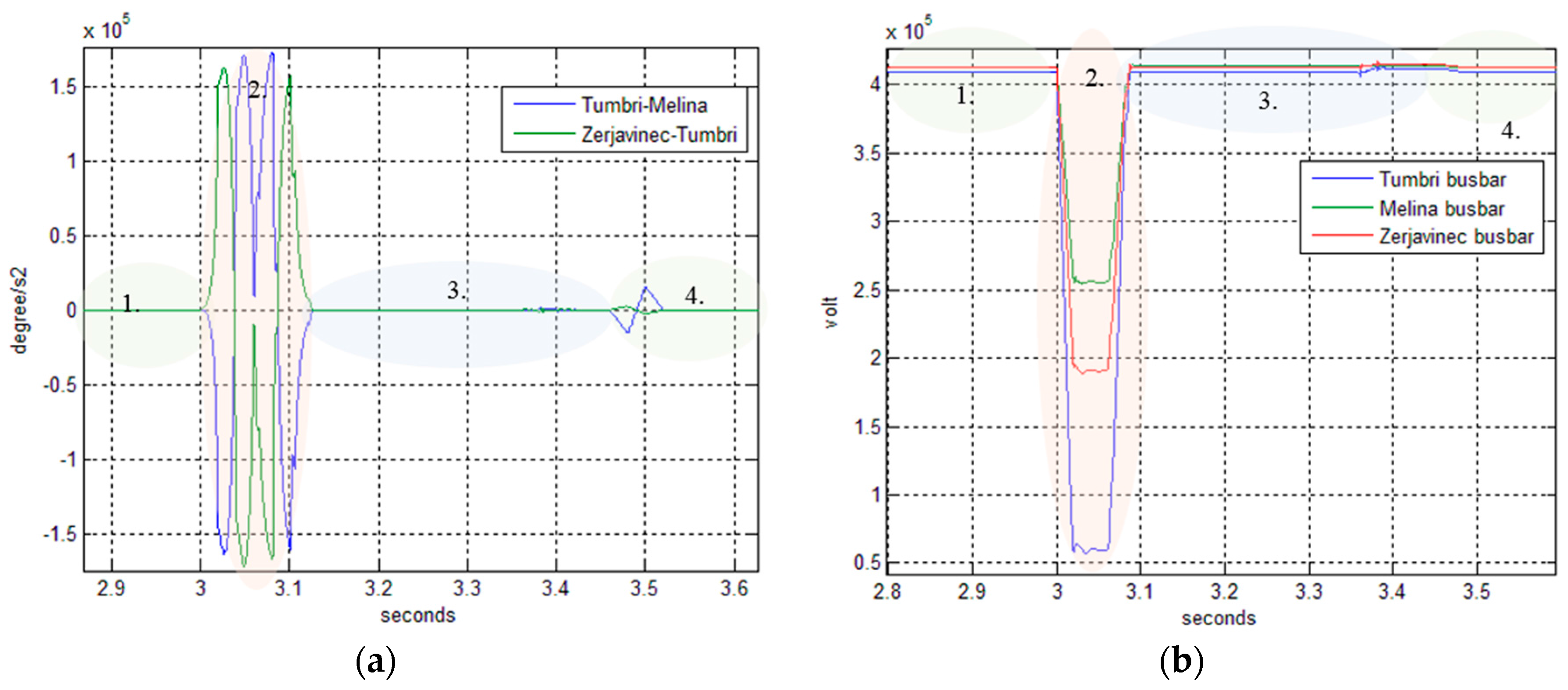
- (2)
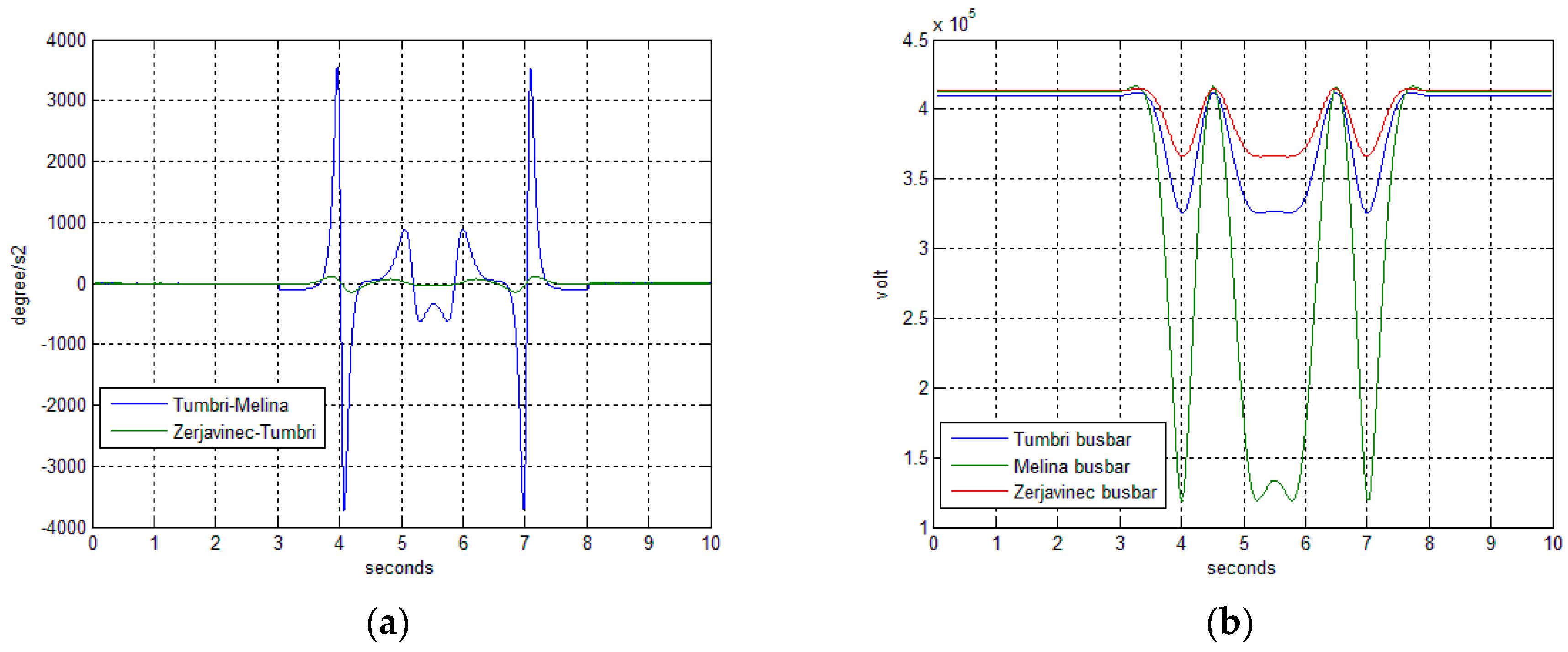
- The fact that circuit breaker closing can be detected and traced is based on the very high angle acceleration values during this short lasting event. That event is pinpointed from the values of ROCOA (Figure 12b) and angle acceleration (Figure 13a), after the closing command from the auto-recloser sequence. Additional criteria for DO location (Equation (23)) are busbar voltages (Figure 13b). The lowest value is measured near the Tumbri substation. Voltage values are higher at the Melina substation then at the Zerjavinec substation because of the damping effect since the Tumbri-Melina line is more than twice longer. Angles values on other transmission lines have insignificant values compared to the faulty line. The voltage drop pattern in the transmission network for this disturbance is typical and can be observed on all transmission lines.
4.3. Power Swing Conditions in Transmission Networks
4.4. Out-of-Step Conditions in Transmission Networks
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

References
- Jin, T.; Chu, F.; Ling, C.; Nzongo, D.L.M. A Robust WLS Power System State Estimation Method Integrating a Wide-Area Measurement System and SCADA Technology. Energies 2015, 8, 2769–2787. [Google Scholar] [CrossRef]
- Terzija, V.; Valverde, G.; Cai, D.; Regulski, P.; Madani, V.; Fitch, J.; Skok, S.; Begovic, M.M.; Phadke, A. Wide area monitoring protection control of future electric power networks. IEEE Proc. 2011, 99, 80–93. [Google Scholar] [CrossRef]
- Hong, X. A Total Solution for Power Network Monitoring and Controlling—WAMAP. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–6. [Google Scholar]
- Perkov, M.; Baranović, N.; Ivanković, I.; Višić, I. Implementation strategies for migration towards smart grid. In Proceedings of the Powergrid Europe 2010, Conference & Exhibition, Amsterdam, The Netherlands, 8–10 June 2010. [Google Scholar]
- Baranovic, N.; Andersson, P.; Ivankovic, I.; Zubrinic-Kostovic, K.; Peharda, D.; Larsson, J.E. Experiences from Intelligent Alarm Processing and Decision Support Tools in Smart Grid Transmission Control Centers. In Proceedings of the CIGRÉ Session 46, Paris, France, 21–26 August 2016. Paper D2-112. [Google Scholar]
- Novosel, D. Phasor Measurement Application Study; Final Project Report; California Institute for Energy and Environment (CIEE), University of California: Berkeley, CA, USA, 2007. [Google Scholar]
- De La Ree, J.; Centeno, V.; Thorp, J.S.; Phadke, A.G. Synchronized Phasor Measurement Applications in Power Systems. IEEE Trans. Smart Netw. 2010, 1, 20–27. [Google Scholar] [CrossRef]
- Stojsavljević, M.; Nemec, D.; Ivanković, I. WAMS in Croatian Power System. In Proceedings of the 2nd International Conference on Monitoring of Power System Dynamics Performance, Saint Petersburg, Russia, 28–30 April 2008; pp. 1–8. [Google Scholar]
- Wang, Y.; Tang, Y.; Ding, L.; Zhang, C.; Chen, Z.; Huang, Y. A Wide-area Coordinated Out-of-step Control System. In Proceedings of the International Conference on Power System Technology (POWERCON 2014), Chengdu, China, 20–22 October 2014; pp. 691–695. [Google Scholar]
- Ivankovic, I.; Kuzle, I.; Holjevac, N. Multifunctional WAMPAC system concept for out-of-step protection based on synchrophasor measurements. Int. J. Electr. Power Energy Syst. 2017, 87, 77–88. [Google Scholar] [CrossRef]
- Wang, Y.; Jin, W.; Ke, S.; Chen, Y.; Ma, J. A novel method for locating power system out-of-step center on the basis of oscillation energy flow. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Conference, Xi’an, China, 25–28 October 2016. [Google Scholar]
- Brahma, S.M. Distance relay with out-of-step blocking function using wavelet transform. IEEE Trans. Power Deliv. 2007, 22, 1360–1366. [Google Scholar] [CrossRef]
- Yaghobi, H. Out-of-step protection of generator using analysis of angular velocity and acceleration data measured from magnetic flux. Electr. Power Syst. Res. 2016, 132, 9–21. [Google Scholar] [CrossRef]
- Sauhats, A.; Utans, A.; Antonovs, D.; Svalovs, A. Angle Control-Based Multi-Terminal Out-of-Step Protection System. Energies 2017, 10, 1–16. [Google Scholar] [CrossRef]
- Schweitzer, E.O.; Whitehead, D.E.; Guzman, A. Real-Time Power System Control Using Synchrophasors. In Proceedings of the 10th Annual Automation and Integration Seminar at WPDAC, Spokane, WA, USA, 7 April 2008. [Google Scholar]
- Zbunjak, Z.; Kuzle, I. Advanced control and system integrity protection schemes of Croatian power transmission network with integrated renewable energy sources. In Proceedings of the IEEE EUROCON, Zagreb, Croatia, 1–4 July 2013; pp. 706–711. [Google Scholar]
- MATLAB. Available online: https://uk.mathworks.com/products/matlab.html (accessed on 24 April 2017).
- Ivankovic, I.; Kuzle, I.; Sirovina, R. Multifunctional System Protection for Transmission Lines Based on Phasor Data. In Proceedings of the IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016; pp. 1–6. [Google Scholar]
- Ivanković, I.; Rubeša, R.; Kuzle, I. Modeling 400 kV Transmission Grid with System Protection and Disturbance Analysis. In Proceedings of the IEEE International Energy Conference—Energycon 2016, Leuven, Belgium, 4–8 April 2016; pp. 1–7. [Google Scholar]
- Zhang, S.; Zhang, Y. A Novel Out-of-Step Splitting Protection Based on the Wide Area Information. IEEE Trans. Smart Grids 2017, 8, 41–51. [Google Scholar] [CrossRef]
- Alinezhad, B.; Karegar, H.K. Out-of-Step Protection Based on Equal Area Criterion. IEEE Trans. Power Syst. 2017, 32, 968–977. [Google Scholar] [CrossRef]
- Li, M.; Pal, A.; Phadke, A.G.; Thorp, J.S. Transient stability prediction based on apparent impedance trajectory recorded by PMUs. Int. J. Electr. Power Energy Syst. 2014, 54, 498–504. [Google Scholar] [CrossRef]
- Rovnyak, S.M.; Taylor, C.W.; Sheng, Y. Decision Trees Using apparent Resistance to Detect Impending Loss of Synchronism. IEEE Trans. Power Deliv. 2000, 15, 1157–1162. [Google Scholar] [CrossRef]
- So, K.H.; Heo, J.Y.; Kim, C.H.; Aggarwal, R.K.; Song, K.B. Out-of-step detection algorithm using frequency deviation of voltage. IET Gener. Transm. Distrib. 2007, 1, 119–126. [Google Scholar] [CrossRef]
- Salimian, M.R.; Aghamohammadi, M.R. Intelligent Out of Step Predictor for Inter Area Oscillations Using Speed-Acceleration Criterion as a Time Matching for Controlled Islanding. IEEE Trans. Smart Grid 2016, PP, 1. [Google Scholar] [CrossRef]
- Frimpong, E.A.; Asumandu, J.; Okyere, P.Y. Neural Network and Speed Deviation Based Generator Out-Of-Step Prediction Scheme. J. Electr. Eng. 2015, 15, 1–8. [Google Scholar]
- Tziouvaras, D.A.; Hou, D. Out-of-step Protection Fundamentals and Advancements. In Proceedings of the 57th Annual Conference for Protective Relay Engineers, College Station, TX, USA, 30 March–1 April 2004; pp. 282–307. [Google Scholar]
- Gajić, Z.; Ivanković, I.; Filipović-Grčić, B.; Rubeša, R. New General Method for Differential Protection of Phase Shifting Transformers. In Proceedings of the International Conference on Advanced Power System Automation and Protection (APAP2007), Jeju, Korea, 24–27 April 2007. [Google Scholar]
- Glavić, M.; Novosel, D.; Heredia, E.; Kosterev, D.; Salazar, A.; Habibi-Ashrafi, F.; Donnelly, M. Real-Time Voltage Control Under Stressed Conditions, See It Fast to Keep Calm. IEEE Power Energy Mag. 2012, 10, 43–53. [Google Scholar] [CrossRef]
- Eissa, M.M.; Masoud, M.E.; Elanwar, M.M.M. A Novel Back up Wide Area Protection Technique for Power Transmission Networks Using Phasor Measurement Unit. IEEE Trans. Power Deliv. 2010, 25, 270–278. [Google Scholar] [CrossRef]
- Soman, S.A.; Nguyen, T.B.; Pai, M.A.; Vaidyanathan, R. Analysis of angle stability problems: A transmission protection systems perspective. IEEE Trans. Power Deliv. 2004, 19, 1024–1033. [Google Scholar] [CrossRef]
- Grillo, S.; Massucco, S.; Pitto, A.; Silvestro, F. Indices for fast contingency ranking in large electric power systems. IEEE Trans. Power Syst. 2010, 1, 660–666. [Google Scholar]
- Blumschein, J.; Yelgin, Y.; Kereit, M. Proper detection and treatment of power swing to reduce the risk of Blackouts. In Proceedings of the Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies (DRPT 2008), Nanjing, China, 6–9 April 2008. [Google Scholar]
- ENTSO-E, European Network of Transmission System Operators for Electricity, “Continental Europe Operation Handbook: Policy 4, Co-Ordinated Operational Planning, Subsections C: Congestion Forecast”. Available online: https://www.entsoe.eu/publications/system-operations-reports/operation-handbook/Pages/default.aspx (accessed on 21 December 2016).
- Ivanković, I.; Kuzle, I. Transmission System Phase Angle Footprint Based on Synchrophasor Measurements. In Proceedings of the 2016 18th Mediterranean Electrotechnical Conference IEEE MELECON, Limassol, Cyprus, 18–20 April 2016; pp. 1–6. [Google Scholar]
- IEEE PSRC WG D6. In Power Swing and Out-of-Step Considerations on Transmission Lines; Report to the Power System Relaying Committee of the IEEE Power Engineering Society; IEEE: Piscataway, NJ, USA, 2005; pp. 1–59.
- Virmani, S.; Vicković, D.; Savulescu, S.C. Real-Time Calculation of Power System Loadability Limits. In Proceedings of the 2007 IEEE Lausanne Power Tech PES, Power Tech, Lausanne, Switzerland, 1–5 July 2007; pp. 1–6. [Google Scholar]
- Yan, J.; Liu, C.C.; Vaidya, U. PMU-Based Monitoring of Rotor Angle Dynamics. IEEE Trans. Power Syst. 2011, 26, 2125–2133. [Google Scholar] [CrossRef]
- Huseinbasic, E.; Kuzle, I.; Tomisa, T. Inter-Area Oscillations Damping Using Dynamic Breaking and Phasor Measurements. In Proceedings of the Power Systems Conference & Exposition (PSCE 2009), Seattle, WA, USA, 15–19 March 2009; pp. 1–6. [Google Scholar]
- Franco, R.; Sena, C.; Taranto, G.N.; Giusto, A. Using synchrophasors for controlled islanding—A prospective application for the Uruguayan power system. IEEE Trans. Power Syst. 2013, 28, 2016–2024. [Google Scholar] [CrossRef]
- Rubeša, R. HOPS Wide Area Monitoring System recordings of Oscillations on the 14th November 2014; Report for ENTSO-E System Protection and Dynamics Group; Croatian Transmission System Operator Ltd.: Zagreb, Croatia, 2015; pp. 1–12. [Google Scholar]
- Sattinger, W. CE South—East Local Mode Oscillation on Nov 14th 2014; Swissgrid: Laufenburg, Switzerland, 2014. [Google Scholar]
- Union of the Co-ordiantion of Transmission of Electricity—UCTE. Final Report—System Disturbance on 4 November 2006; UCTE: Brussels, Belgium, 2007; pp. 1–85. [Google Scholar]
- Lukić, M.; Kuzle, I.; Tešnjak, S. An Adaptive Approach to setting Underfrequency Load Shedding Relays for an Isolated Power System with Private Generation. In Proceedings of the IEEE Mediterranean Electrotechnical Conference (MELECON ’98), Tel Aviv, Israel, 18–20 May 1998; pp. 1122–1125. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 400 kV Transformer Substation 1 | Main Pathway Length (km) | Main Pathway Delay (ms) | Reserve Pathway Length (km) | Reserve Pathway Delay (ms) |
|---|---|---|---|---|
| Ernestinovo | 270 | 1.80295 | 320 | 2.20360 |
| Zerjavinec | 35 | 0.60058 | 190 | 1.20260 |
| Tumbri | 15 | 0.60048 | 40 | 0.80080 |
| Melina | 150 | 0.80135 | 320 | 1.40235 |
| Konjsko | 360 | 0.80340 | 410 | 1.80365 |
| Velebit | 270 | 1.72059 | 450 | 2.78630 |
| Method | Line End Measure-Ment | Wide Area Measure-Ment | Independent from Setting 1 Process | Real Time Application | Demerits |
|---|---|---|---|---|---|
| Fuzzy logic/clustering based (e.g., [9]) | ✓ | ✕ | ✕ | ✕ | study work phase |
| WAMPAC system (e.g., [10]) | ✓ | ✓ | ✓ | ✓ | Communication requirements |
| Energy function based(e.g., [11]) | ✓ | ✕ | ✕ | ✕ | study work phase |
| Generator angle based (e.g., [13]) | ✓ | ✕ | ✓ | ✓ | availability of generator measurements, communication requirements |
| Equal area based (e.g., [20]) | ✓ | ✕ | ✕ | ✕ | Inertia values (H) for generators and parts of the system needed, system reduction, study work phase |
| Apparent impedance trajectory based (e.g., [22]) | ✓ | ✕ | ✓ | ✓ | Communication requirements |
| Resistance based(e.g., [23]) | ✓ | ✕ | ✕ | ✓ | study work phase |
| Voltage based(e.g., [24]) | ✓ | ✕ | ✕ | ✓ | source impedances dependent, study work phase |
| Swing voltage/Speed acceleration criterion based (e.g., [25]) | ✓ | ✕ | ✕ | ✓ | voltage on source dependent, study work phase, system reduction (2 machines) approximation |
| Neural network based (e.g., [26]) | ✓ | ✕ | ✕ | ✕ | study work phase |
| Impedance based (e.g., [27]) | ✓ | ✕ | ✕ | ✓ | source impedances dependent, study work phase |
| No. | Protection and Monitoring Functions | |
|---|---|---|
| System Protection | Line Back up Protection | |
| 1. | Phase angle difference (Δϕ) | Over current protection |
| 2. | Rate of change of angle (angle velocity) ω | Over load protection |
| 3. | Angle acceleration α | Line differential protection (ΔI) |
| 4. | Rate of change of voltage | Line impedance protection |
| 5. | Rate of change of current | Under voltage protection |
| 6. | Rate of change of active power | Over voltage protection |
| 7. | Rate of change of reactive power | Voltage monitoring |
| 8. | Rate of change of resistance | Current monitoring |
| 9. | Rate of change of reactance | Active power monitoring |
| 10. | Rate of change of impedance | Reactive power monitoring |
| 11. | Equivalent inertia constant of the system | Impedance monitoring |
| AC Line Parameters 1 | ZER-ERN | TUM-ZER | MEL-TUM | MEL-VEL | VEL-KONJ |
|---|---|---|---|---|---|
| r1 (Ohms/km) | 0.0319 | 0.0308 | 0.0300 | 0.0340 | 0.0340 |
| r0 (Ohms/km) | 0.1897 | 0.1222 | 0.1920 | 0.2500 | 0.2500 |
| l1 (H/km) | 1.0554 × 10−3 | 1.021 × 10−3 | 1.00964 × 10−3 | 1.0859 × 10−3 | 1.0859 × 10−3 |
| l0 (H/km) | 2.3120 × 10−3 | 2.136 × 10−3 | 3.2800 × 10−3 | 2.6560 × 10−3 | 2.6560 × 10−3 |
| c1 (F/km) | 11.0828 × 10−9 | 11.493 × 10−9 | 11.2102 × 10−9 | 11.2102 × 10−3 | 11.2102 × 10−9 |
| c0 (F/km) | 4.9363 × 10−9 | 6.847 × 10−9 | 5.4140 × 10−9 | 8.0255 × 10−9 | 8.0255 × 10−9 |
| length (km) | 233 | 63 | 127 | 178 | 100 |
| No. | PMU Data Package | |
|---|---|---|
| Function | Features | |
| 1. | Phase values | UL1, UL2, UL3 and IL1, IL2, IL3 |
| 2. | Symmetrical components | U1, U2, U0 and I1, I2, I0 |
| 3. | Sampling rate | 20 ms, primary Ethernet channel100 ms secondary Ethernet channel |
| 4. | Frequency | f, ROCOF (rate of change of frequency) |
| 5. | Binary input | Circuit breaker status and other information from switchyard |
| 6. | Binary output | Circuit breaker trip command and alarm |
| 7. | Current input | Record of nominal and short circuit current values |
| 8. | Communication channel 1 | Primary Ethernet channel, with data package divided into two data streams, IEEE C37.118.2 protocol for PDC1 and PDC2 |
| 9. | Communication channel 2 | Secondary channel, service port and IEEE C37.118.2 protocol encapsulated in algorithm in order to pull out phasor data form PMU local memory |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ivanković, I.; Kuzle, I.; Holjevac, N. Wide Area Information-Based Transmission System Centralized Out-of-Step Protection Scheme. Energies 2017, 10, 633. https://doi.org/10.3390/en10050633
Ivanković I, Kuzle I, Holjevac N. Wide Area Information-Based Transmission System Centralized Out-of-Step Protection Scheme. Energies. 2017; 10(5):633. https://doi.org/10.3390/en10050633
Chicago/Turabian StyleIvanković, Igor, Igor Kuzle, and Ninoslav Holjevac. 2017. "Wide Area Information-Based Transmission System Centralized Out-of-Step Protection Scheme" Energies 10, no. 5: 633. https://doi.org/10.3390/en10050633
APA StyleIvanković, I., Kuzle, I., & Holjevac, N. (2017). Wide Area Information-Based Transmission System Centralized Out-of-Step Protection Scheme. Energies, 10(5), 633. https://doi.org/10.3390/en10050633