
Optimal Control Based on Maximum Power Point Tracking (MPPT) of an Autonomous Hybrid Photovoltaic/Storage System in Micro Grid Applications

Abstract
:1. Introduction
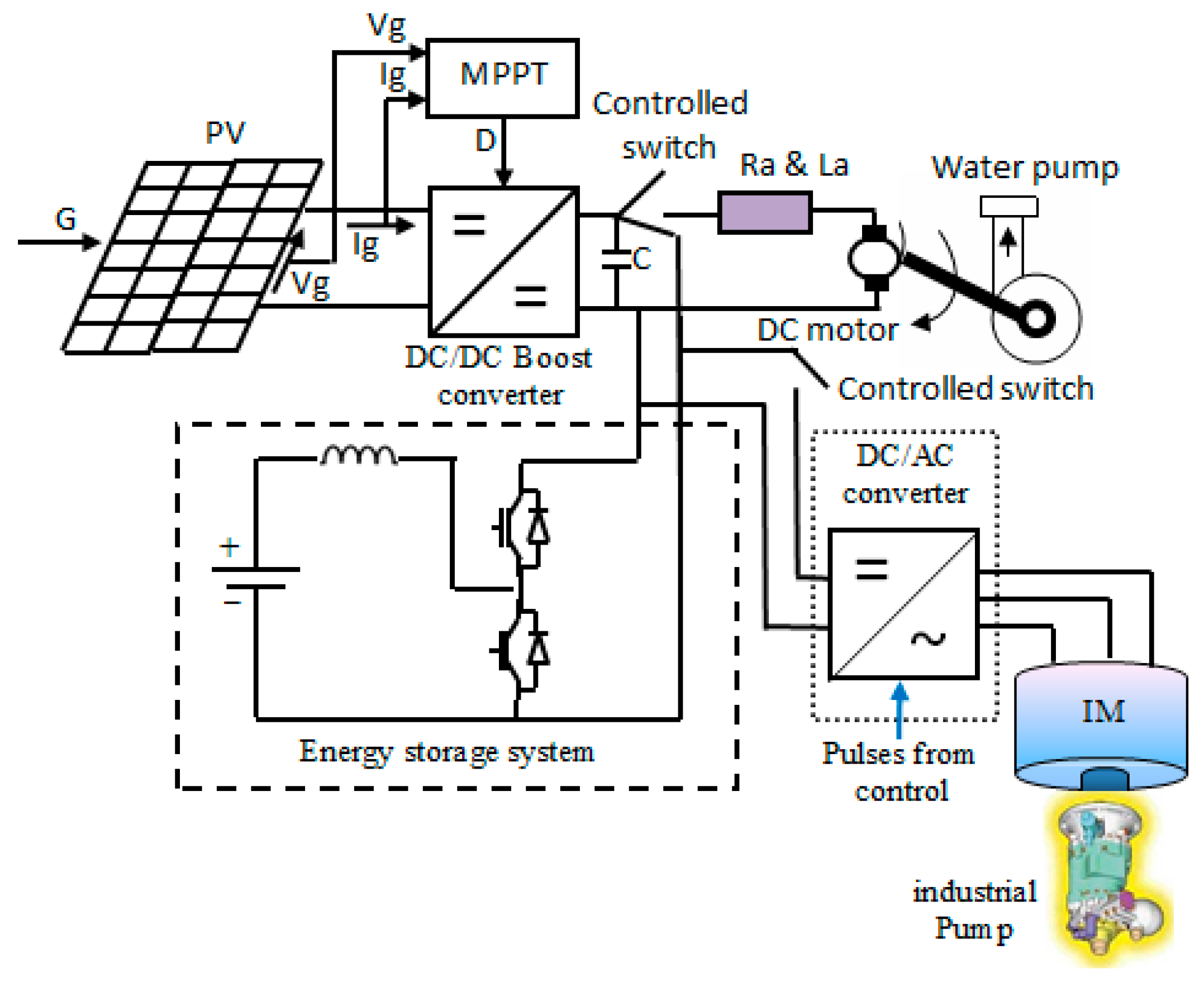
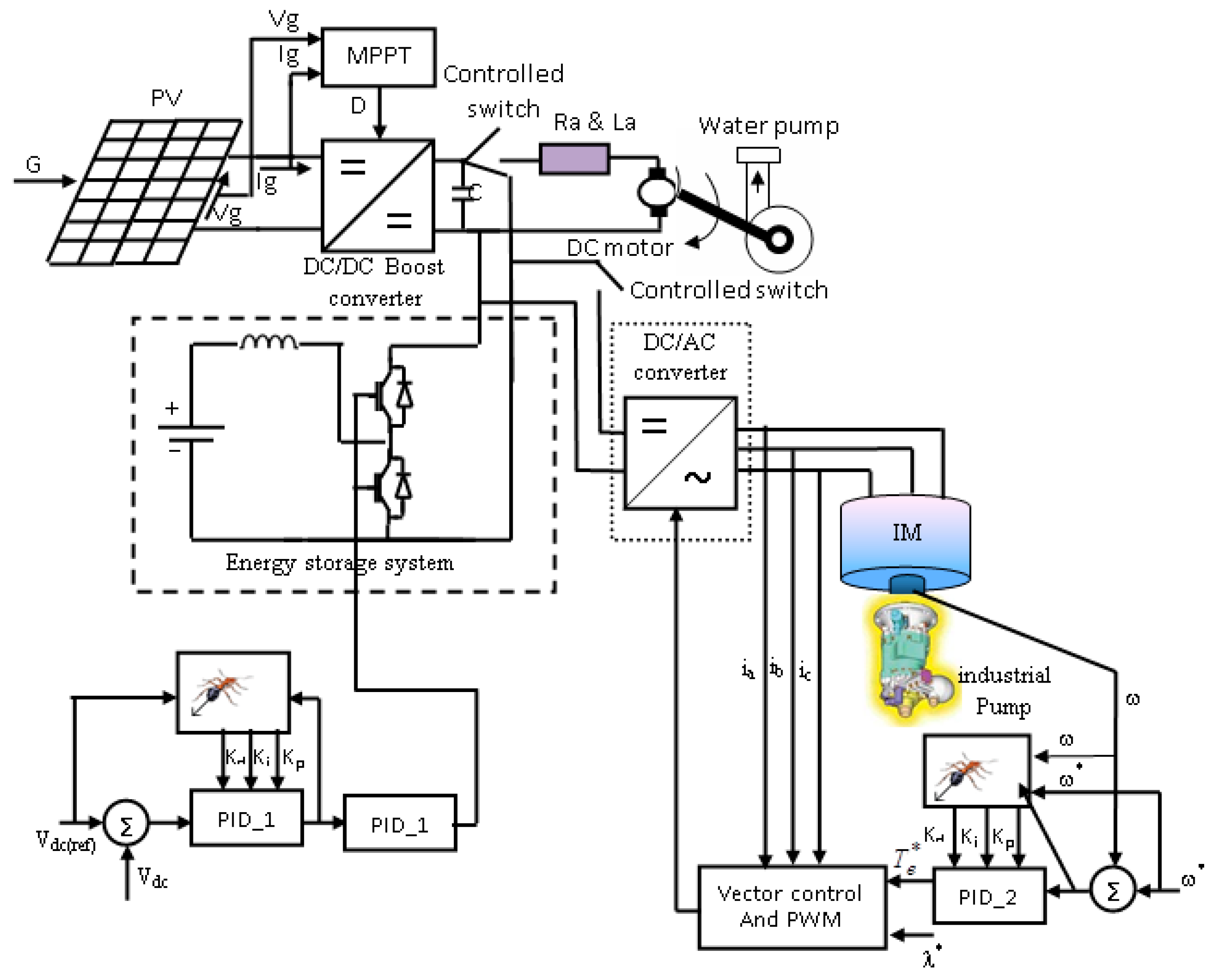
2. System Configuration
3. System Mathematical Modeling
3.1. PV Generator Model
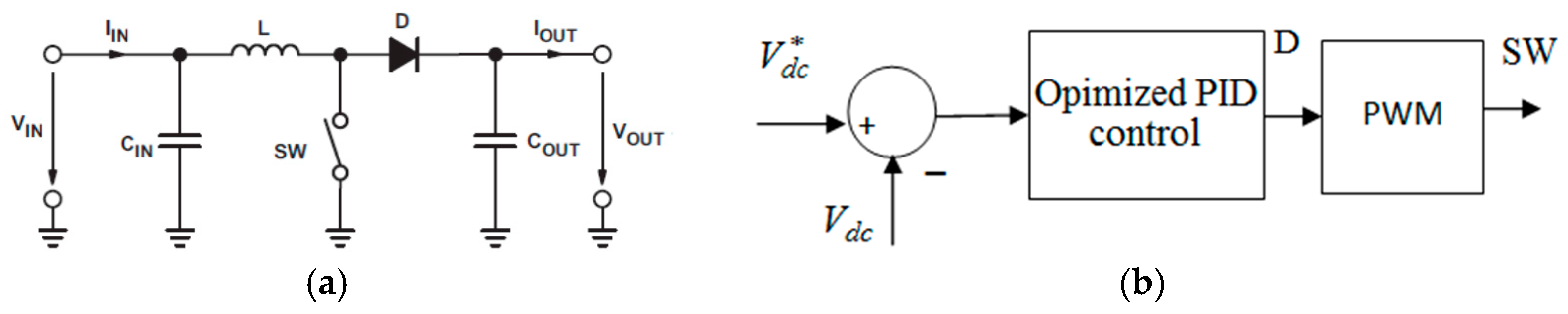
3.2. DC-DC Converter
3.3. Energy Storage System
3.4. DC Motor/Water Pump Model
3.5. Induction Motor and VDPC Pump
4. The MPPT Technique
5. Artificial Bee Colony Algorithm
- Step 1
- Initializing the population of solutions xi,j, i = 1,..., SN, j = 1,..., L
- Step 2
- Population evaluation
- Step 3
- Cycle = 1
- Step 4
- Repeating
- Step 5
- New solutions production (food source positions) vij in the neighborhood of xij for the employed bees using the formula and evaluate them:where k is a solution in the neighborhood of i.vi,j = xi,j + φij(xi,j − xk,j)
- Step 6
- Applying the greedy selection of the process.
- Step 7
- The probability values Pi is computed based on their fitness values using Equations (15) and (16):For each individual ith solution, fi is obtained separately that by normalizing Pi values into (0, 1).
- Step 8
- Producing and evaluating the new solutions vi,j for the onlookers based on the selected solutions xi,j depending on Pi.
- Step 9
- Applying the avid selection process.
- Step 10
- Determine the abandoned solution (source), if it exists, and replace it with a new randomly produced solution xi,j for the scout using Equation (17):
- Step 11
- Memorize the best food source position (solution) achieved so far.
- Step 12
- Cycle = Cycle + 1
- Step 13
- Until Cycle = MCN.
- (1)
- A global selection process used by the artificial onlooker bees for discovering promising regions.
- (2)
- A local selection process carried out in a region by the artificial worker bees and the onlookers depending on local information for determining a neighbor food source around the source in the memory.
- (3)
- A local selection process called greedy selection process carried out by all bees.
- (4)
- A random selection process carried out by scouts.
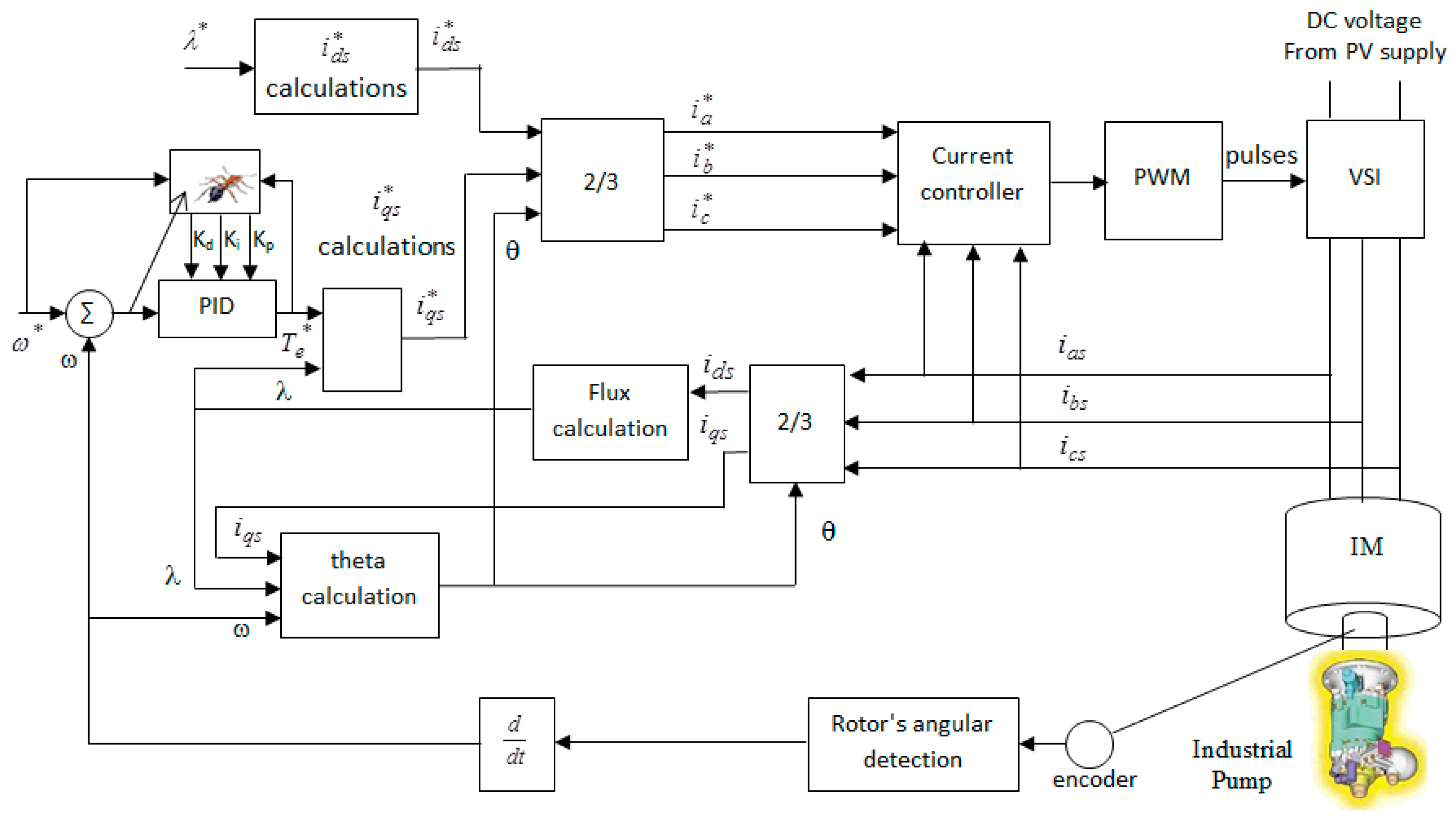
6. DC-AC Converter and Vector Control
- -
- The developed torque and flux should be obtained and then the corresponding reference stator currents in d and q-axis and are obtained.
- -
- The angular position θ is then obtained and it used in transformation between synchronous and stationary reference frames to achieve the desired stator current in d and q-axis components.
- -
- Then, the obtained d and q-axis components of the stator current in stationary reference frame are converted into the desired three phase currents, which are used for DC/AC inverter control.
7. Simulation Results
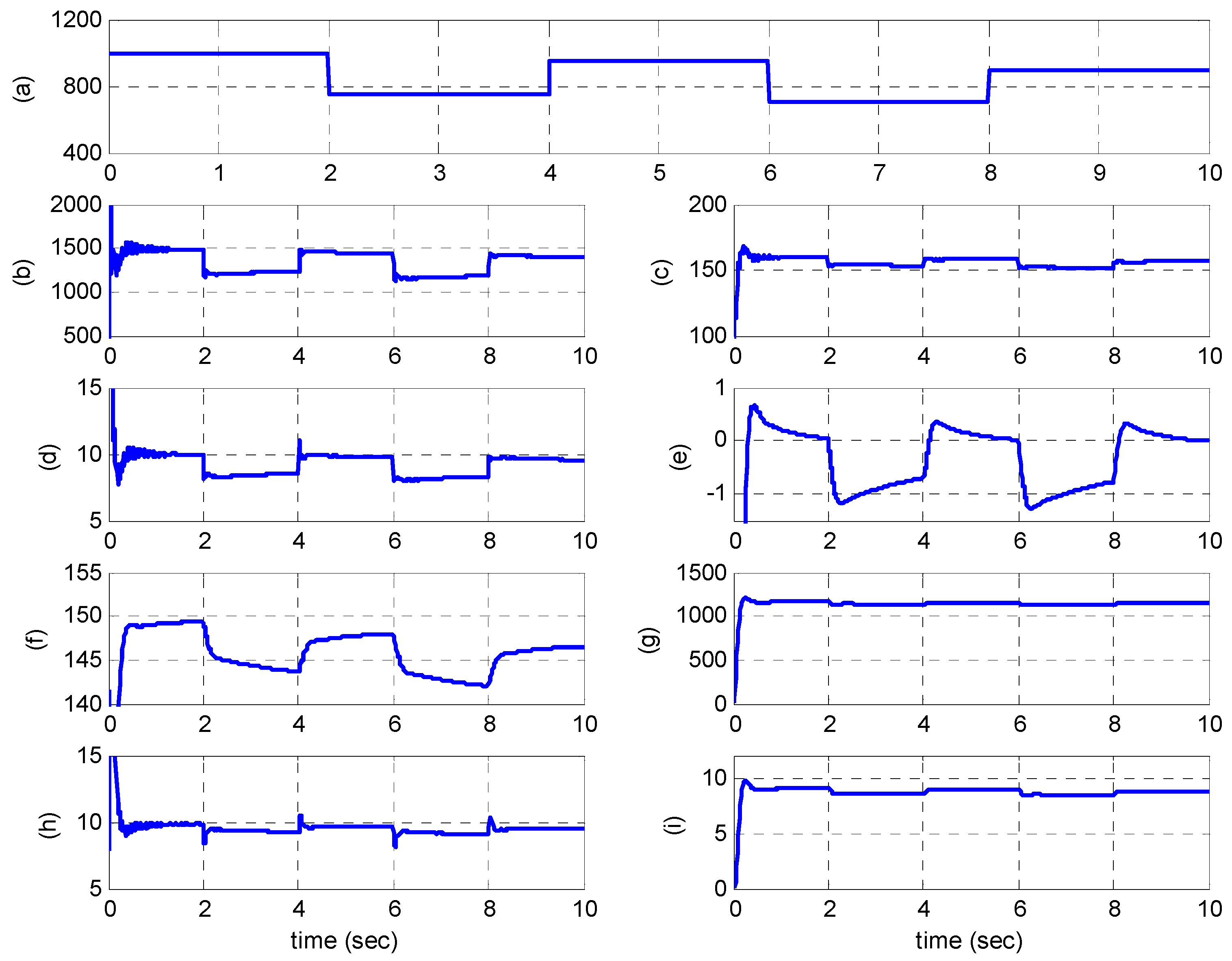
7.1. Case 1
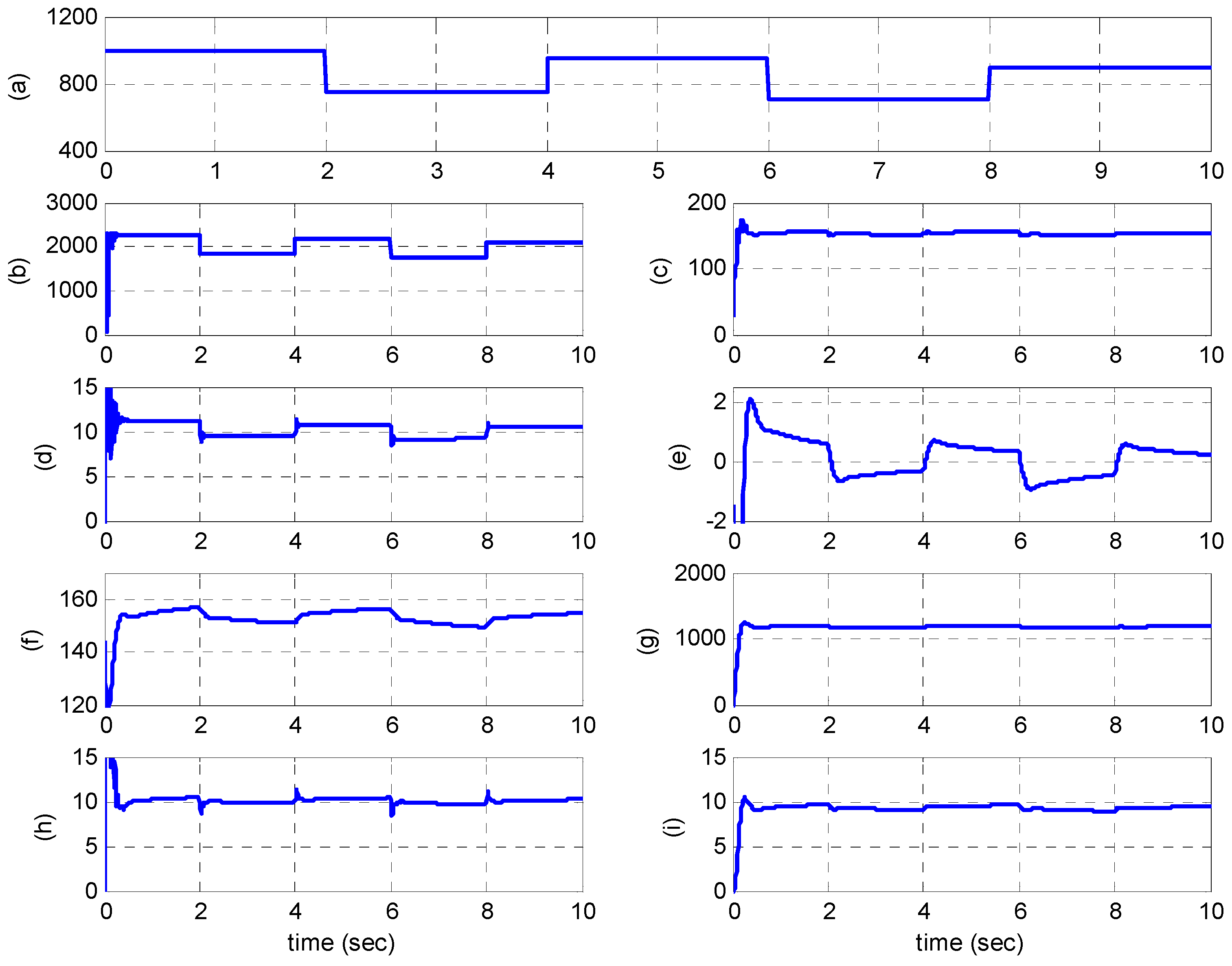
7.2. Case 2
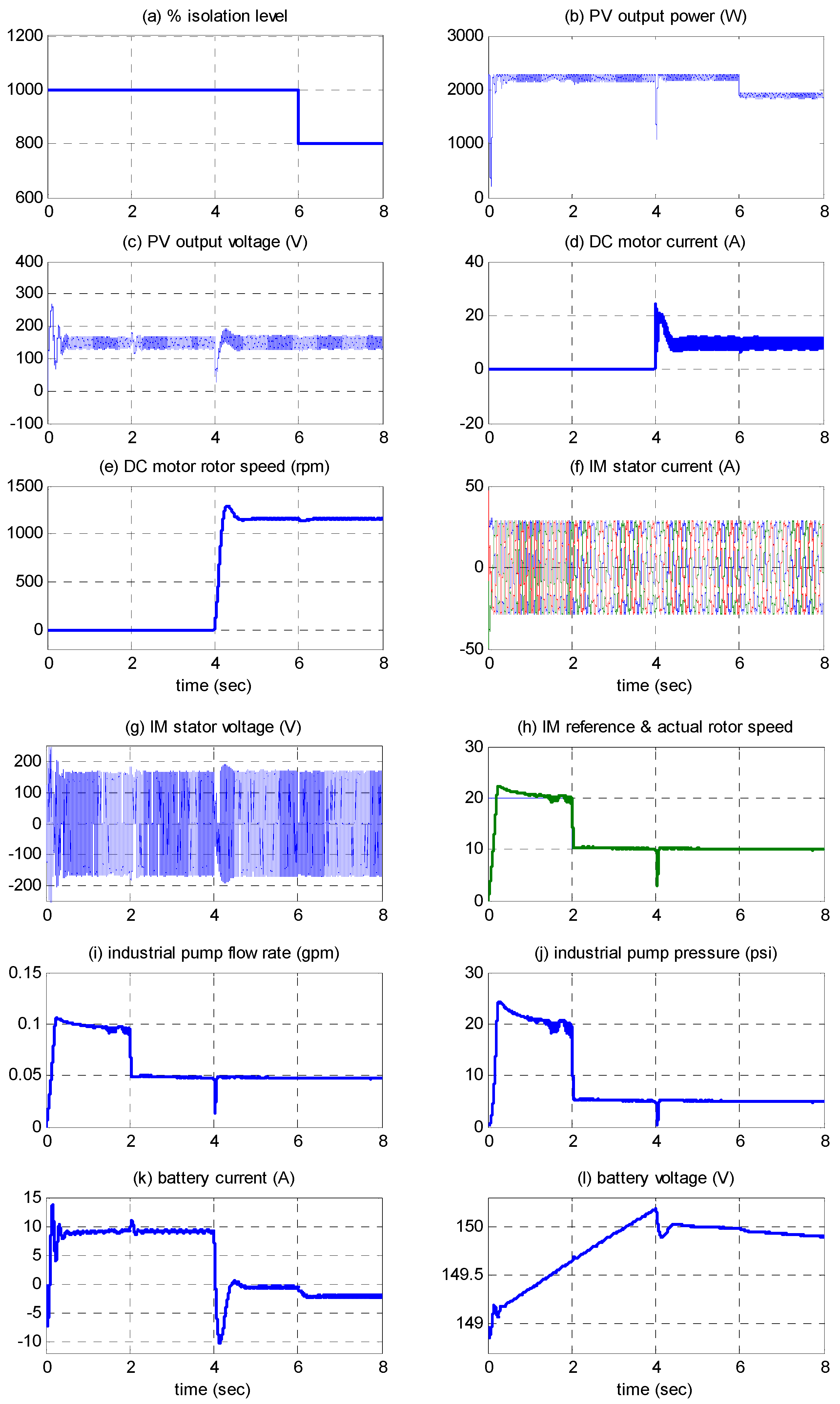
7.3. Case 3
- -
- when the isolation level decrease from 1000 to 800, the PV output power decreases from 2200 W to 1950 W and the battery current increases from a discharging current of 1 A to a discharging current of 2.5 A as shown in Figure 7a,b,k, respectively.
- -
- Varying the IM rotor speed affects the motor stator current and voltage frequency and the industrial pump flow rate and pressure as shown in Figure 7f,g,i,j, respectively.
- -
- Operating the DC motor pump system at time 4 seconds forces the current of the battery to vary from charging 9 A to 1 A discharging as shown in Figure 7k.
8. Conclusions
Author Contributions
Conflicts of Interest
Abbreviations
| PV generator output voltage | |
| PV generator current | |
| Insolation photo current of the PV generator | |
| PV generator reverse saturation current | |
| PV generator series resistance | |
| DC motor armature voltage | |
| DC motor armature current | |
| Armature resistance | |
| Rotor shaft speed of the DC motor. | |
| Back emf voltage of the DC motor. | |
| Torque constant of the DC motor. | |
| back emf constant of the DC motor. | |
| friction coefficient of the DC motor. | |
| moment of inertia of the DC motor. | |
| Load torque on the DC motor. | |
| Load torque constant on the DC motor. | |
| D | Duty ratio of the DC/DC converter. |
| Insolation level | |
| DC Motor friction | |
| DC motor Load friction | |
| Torque & back emf constant | |
| ξ | Load torque constant |
References
- Takagi, M.; Iwafune, Y.; Yamaji, K.; Yamamoto, H.; Okano, K.; Hiwatari, R.; Ikeya, T. Economic Value of PV Energy Storage Using Batteries of Battery-Switch Stations. IEEE Trans. Sustain. Energy 2013, 4, 164–173. [Google Scholar] [CrossRef]
- Eymour, H.R.; Sutanto, D.; Muttaqi, K.M.; Ciufo, P. Solar PV and Battery Storage Integration using a New Configuration of a Three-Level NPC Inverter with Advanced Control Strategy. IEEE Trans. Energy Convers. 2014, 29, 354–365. [Google Scholar]
- Karavas, C.S.; Kyriakarakos, G.; Arvanitis, K.G.; Papadakis, G. A multi-agent decentralized energy management system based on distributed intelligence for the design and control of autonomous poly generation micro grids. Energy Convers. Manag. 2015, 103, 166–179. [Google Scholar] [CrossRef]
- Kyriakarakos, G.; Dounis, A.I.; Rozakis, S.; Arvanitis, K.G.; Papadakis, G. Polygeneration microgrids: A viable solution in remote areas for supplying power, potable water and hydrogen as transportation fuel. Appl. Energy 2011, 88, 4517–4526. [Google Scholar] [CrossRef]
- Von Appen, J.; Stetz, T.; Braun, M.; Schmiegel, A. Local Voltage Control Strategies for PV Storage Systems in Distribution Grids. IEEE Trans. Smart Grid 2014, 5, 1002–1009. [Google Scholar] [CrossRef]
- Adhikari, S.; Fangxing, L. Coordinated V-f and P-Q Control of Solar Photovoltaic Generators with MPPT and Battery Storage in Microgrids. IEEE Trans. Smart Grid 2014, 5, 1270–1281. [Google Scholar] [CrossRef]
- Renaudineau, H.; Donatantonio, F.; Fontchastagner, J.; Petrone, G.; Spagnuolo, G.; Martin, J.-P.; Pierfederici, S. A PSO-Based Global MPPT Technique for Distributed PV Power Generation. IEEE Trans. Ind. Electron. 2015, 65, 1047–1058. [Google Scholar] [CrossRef]
- Oshiro, M.; Tanaka, K.; Senjyu, T.; Toma, S.; Yona, A.; Saber, A.Y.; Funabashi, T.; Kim, C. Optimal voltage control in distribution systems using PV generators. Int. J. Electr. Power Energy Syst. 2011, 33, 485–492. [Google Scholar] [CrossRef]
- Mazouz, N.; Midoun, A. Control of a DC/DC converter by fuzzy controller for a solar pumping system. Int. J. Electr. Power Energy Syst. 2011, 33, 1623–1630. [Google Scholar] [CrossRef]
- Salah, C.B.; Ouali, M. Comparison of fuzzy logic and neural network in maximum power point tracker for PV systems. Electr. Power Syst. Res. 2011, 81, 43–50. [Google Scholar] [CrossRef]
- Liu, Y.-H.; Liu, C.; Huang, J.; Chen, J. Neural-network-based maximum power point tracking methods for photovoltaic systems operating under fast changing environments. Sol. Energy 2013, 89, 42–53. [Google Scholar] [CrossRef]
- Bilal, B. Implementation of artificial bee colony algorithm on maximum power point tracking for pv modules. In Proceedings of the IEEE 8th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 23–25 May 2013; pp. 1–4. [Google Scholar]
- Kassem, A.M. Modelling and robust control design of a standalone wind-based energy storage generation unit powering an induction motor variable-displacement pressure compensated pump. IET Renew. Power Gener. 2016, 10, 275–286. [Google Scholar] [CrossRef]
- Johan, N.F.M.; Azmi, A.; Rashid, M.A.; Yaakob, S.B.; Rahim, S.R.A.; Zali, S.M. Multi-Objective Using Artificial Bee Colony Optimization For Distributed Generation Placement On Power System. In Proceedings of the IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Minden, Malaysia, 29 November–1 December 2013; pp. 117–121. [Google Scholar]
- Abu-Mouti, F.S.; El-Hawary, M.E. Optimal Distributed Generation Allocation and Sizing in Distribution Systems via Artificial Bee Colony Algorithm. IEEE Trans. Power Deliv. 2011, 26, 2090–2101. [Google Scholar] [CrossRef]
- De, M.; Goswami, S.K. Optimal Reactive Power Procurement with Voltage Stability Consideration in Deregulated Power System. IEEE Trans. Power Syst. 2014, 29, 2078–2086. [Google Scholar] [CrossRef]
- Sundareswaran, K.; Sankar, P.; Nayak, P.S.R.; Simon, S.P.; Palani, S. Enhanced Energy Output From a PV System Under Partial Shaded Conditions Through Artificial Bee Colony. IEEE Trans. Sustain. Energy 2015, 6, 198–209. [Google Scholar] [CrossRef]
- Javadi, M.R.; Jalilvand, A.; Noroozian, R.; Valizadeh, M. Optimal Design and Economic Assessment of Battery Based Stand-Alone Wind/PV Generating System Using ABC. In Proceedings of the IEEE Proceedings of the 3rd Conference on Thermal Power Plants (CTPP), Tehran, Iran, 18–19 October 2011; pp. 1–7. [Google Scholar]
- Hussein, A.; Hirasawa, K.; Hu, J. A robust control method for a PV-supplied DC motor using universal learning networks. Sol. Energy 2004, 76, 771–780. [Google Scholar] [CrossRef]
- Kassem, A.M.; Zaid, S.A. Load parameter waveforms improvement of a standalone wind-based energy storage system and Takagi–Sugeno fuzzy logic algorithm. IET Renew. Power Gener. 2014, 8, 775–785. [Google Scholar] [CrossRef]
- Swierczynski, M.; Teodorescu, R.; Rasmussen, C.N.; Rodriguez, P.; Vikelgaard, H. Overview of the Energy Storage Systems for Wind Power Integration Enhancement. In Proceedings of the IEEE ISIE, Bari, Italy, 4–7 July 2010; pp. 3749–3756. [Google Scholar]
- Adly, M.; Besheer, A.H. A meta-heuristics search algorithm as a solution for energy transfer maximization in stand-alone photovoltaic systems. Int. J. Electr. Power Energy Syst. 2013, 51, 243–254. [Google Scholar] [CrossRef]
- El-Fergany, A.A.; Abdelaziz, A.Y. Capacitor placement for net saving maximization and system stability enhancement in distribution networks using artificial bee colony-based approach. Int. J. Electr. Power Energy Syst. 2014, 54, 235–243. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value |
|---|---|
| Q | 1.602 × 10−19 C |
| Z | 1.38 × 10−23 J/K |
| U | 298.15 °C |
| ε | 1.1 |
| Ns | 460 |
| Np | 15 |
| Rs | 0.0152 Ω |
| Iph | 4.8 A |
| Io | 2.58 × 10−5 A |
| Rated Power | 2.5 KW |
| Item | Proposed Setting |
|---|---|
| The colony size | 70 |
| Food Number | 35 |
| Limit | 150 |
| Max Cycle | 2000 |
| Item | G = 1000 | G = 700 | ||
|---|---|---|---|---|
| With MPPT | Without MPPT | With MPPT | Without MPPT | |
| PV output power (W) | 2122 | 1475.4 | 1652 | 1157.2 |
| PV output voltage(V) | 160 | 149.68 | 154 | 143.2 |
| PV output current (A) | 11.73 | 8.4 | 9.67 | 8.14 |
| Battery current (A) | 0.84 | 0.16 | −0.36 | −0.78 |
| Motor current (A) | 10.725 | 8.22 | 10.09 | 7.34 |
| Motor speed (rpm) | 1219 | 1157 | 1203.5 | 1114 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Atawi, I.E.; Kassem, A.M. Optimal Control Based on Maximum Power Point Tracking (MPPT) of an Autonomous Hybrid Photovoltaic/Storage System in Micro Grid Applications. Energies 2017, 10, 643. https://doi.org/10.3390/en10050643
Atawi IE, Kassem AM. Optimal Control Based on Maximum Power Point Tracking (MPPT) of an Autonomous Hybrid Photovoltaic/Storage System in Micro Grid Applications. Energies. 2017; 10(5):643. https://doi.org/10.3390/en10050643
Chicago/Turabian StyleAtawi, Ibrahem E., and Ahmed M. Kassem. 2017. "Optimal Control Based on Maximum Power Point Tracking (MPPT) of an Autonomous Hybrid Photovoltaic/Storage System in Micro Grid Applications" Energies 10, no. 5: 643. https://doi.org/10.3390/en10050643
APA StyleAtawi, I. E., & Kassem, A. M. (2017). Optimal Control Based on Maximum Power Point Tracking (MPPT) of an Autonomous Hybrid Photovoltaic/Storage System in Micro Grid Applications. Energies, 10(5), 643. https://doi.org/10.3390/en10050643