
Active Vibration Control of Swash Plate-Type Axial Piston Machines with Two-Weight Notch Least Mean Square/Filtered-x Least Mean Square (LMS/FxLMS) Filters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
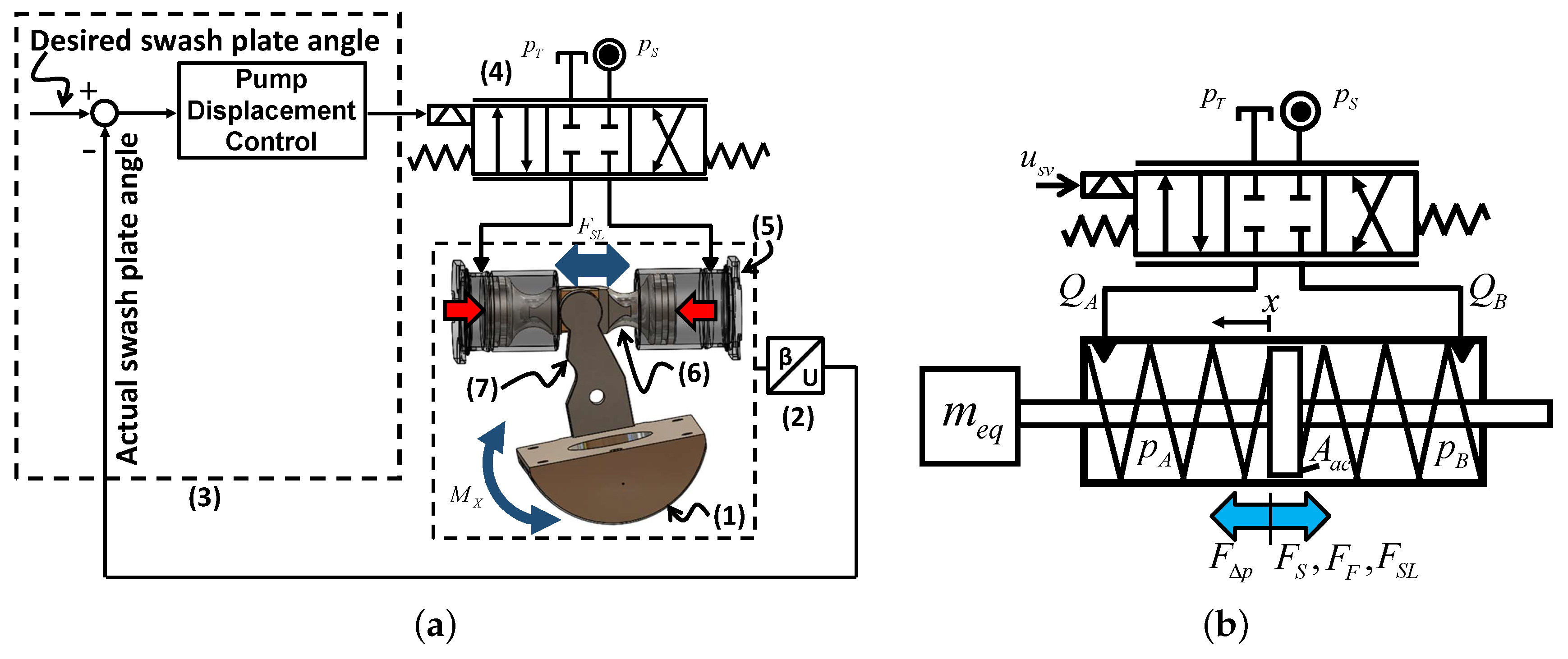
2. High Bandwidth Pump Control System
Pump Control System Modelling
3. Swash Plate Active Vibration Controller Design
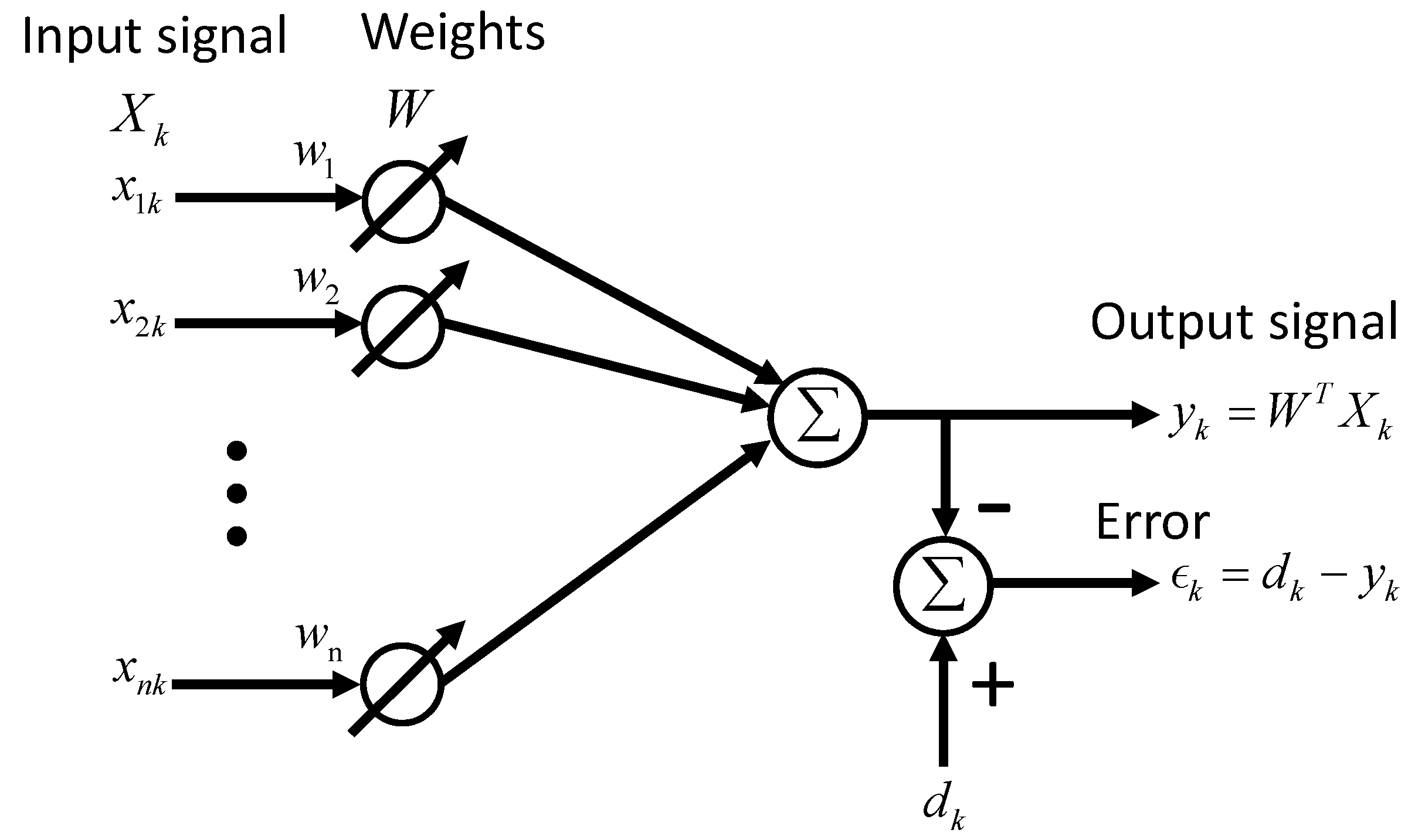
3.1. LMS Algorithm
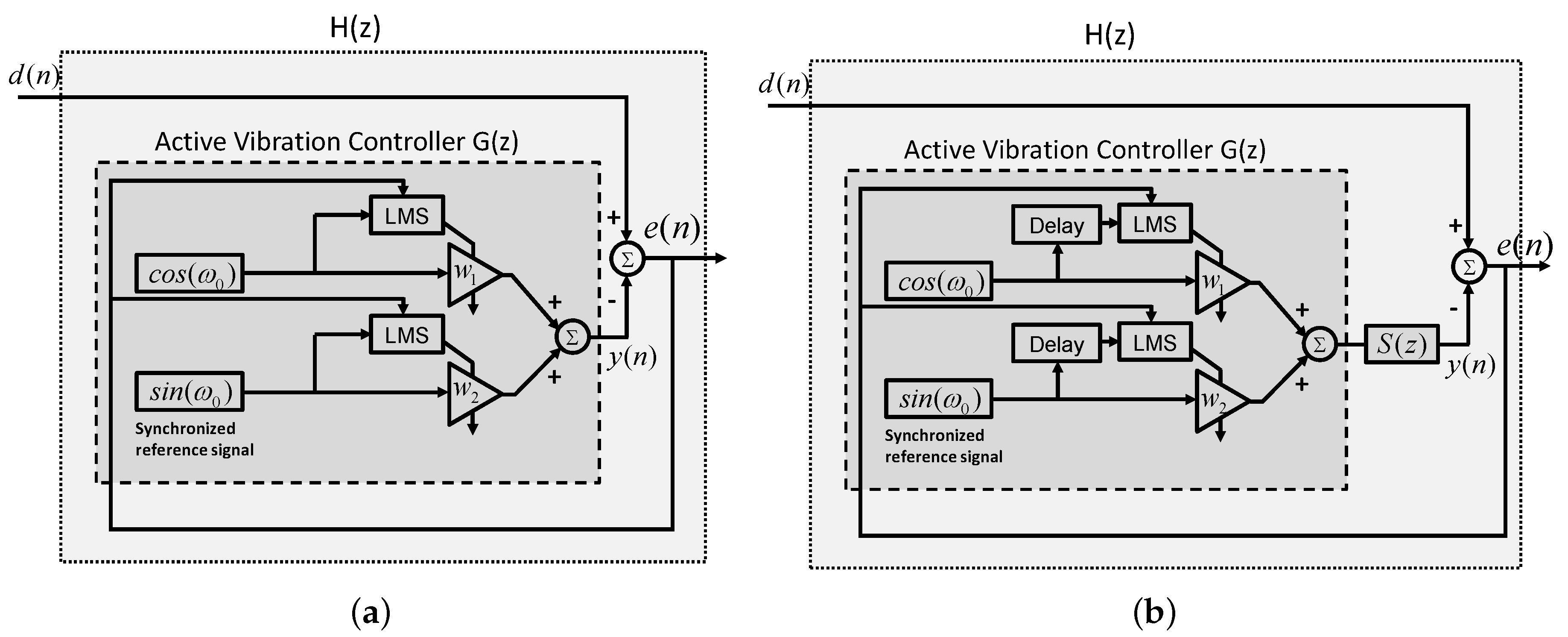
3.2. Two-Weight Notch LMS Filter
3.3. Two-Weight Notch LMS Filter with Delay Unit Compensation
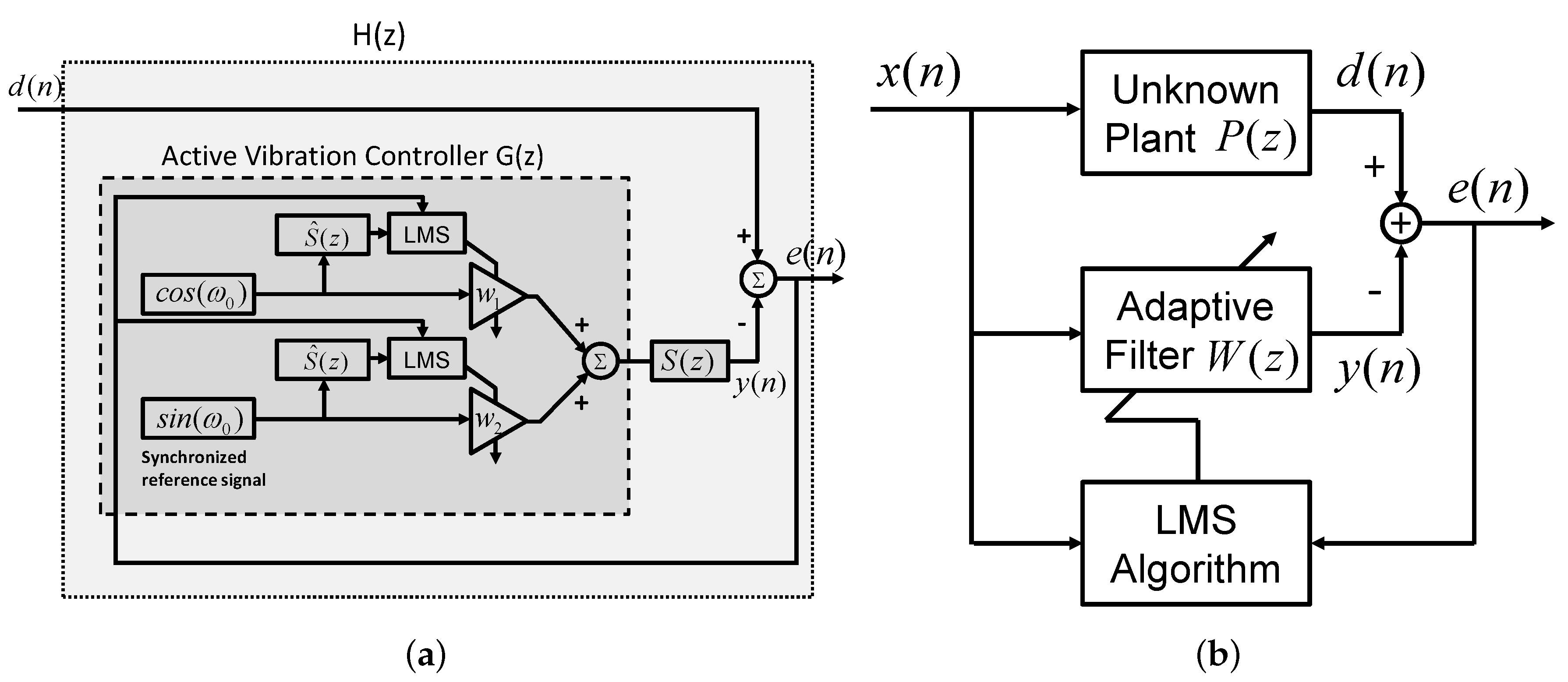
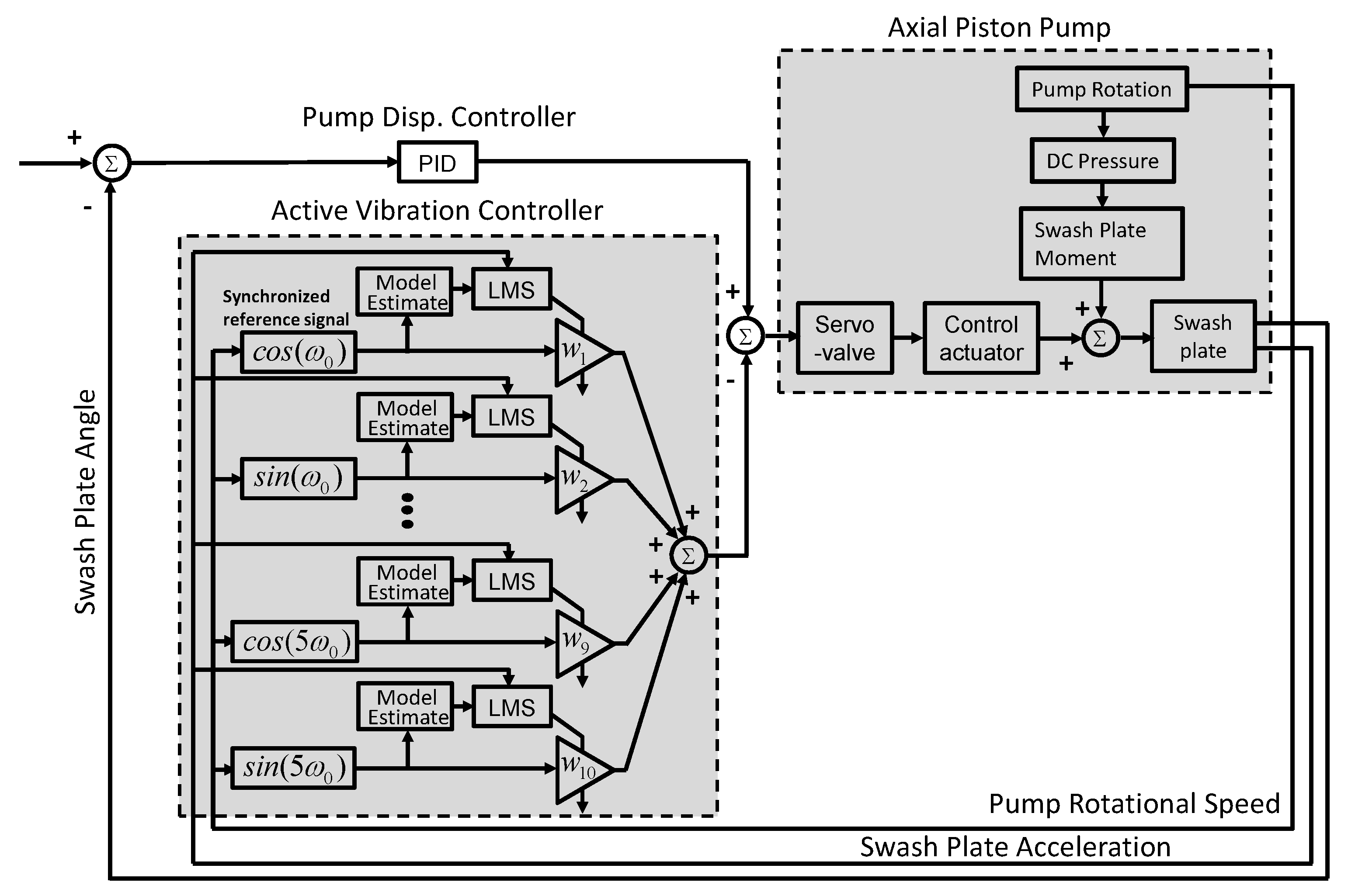
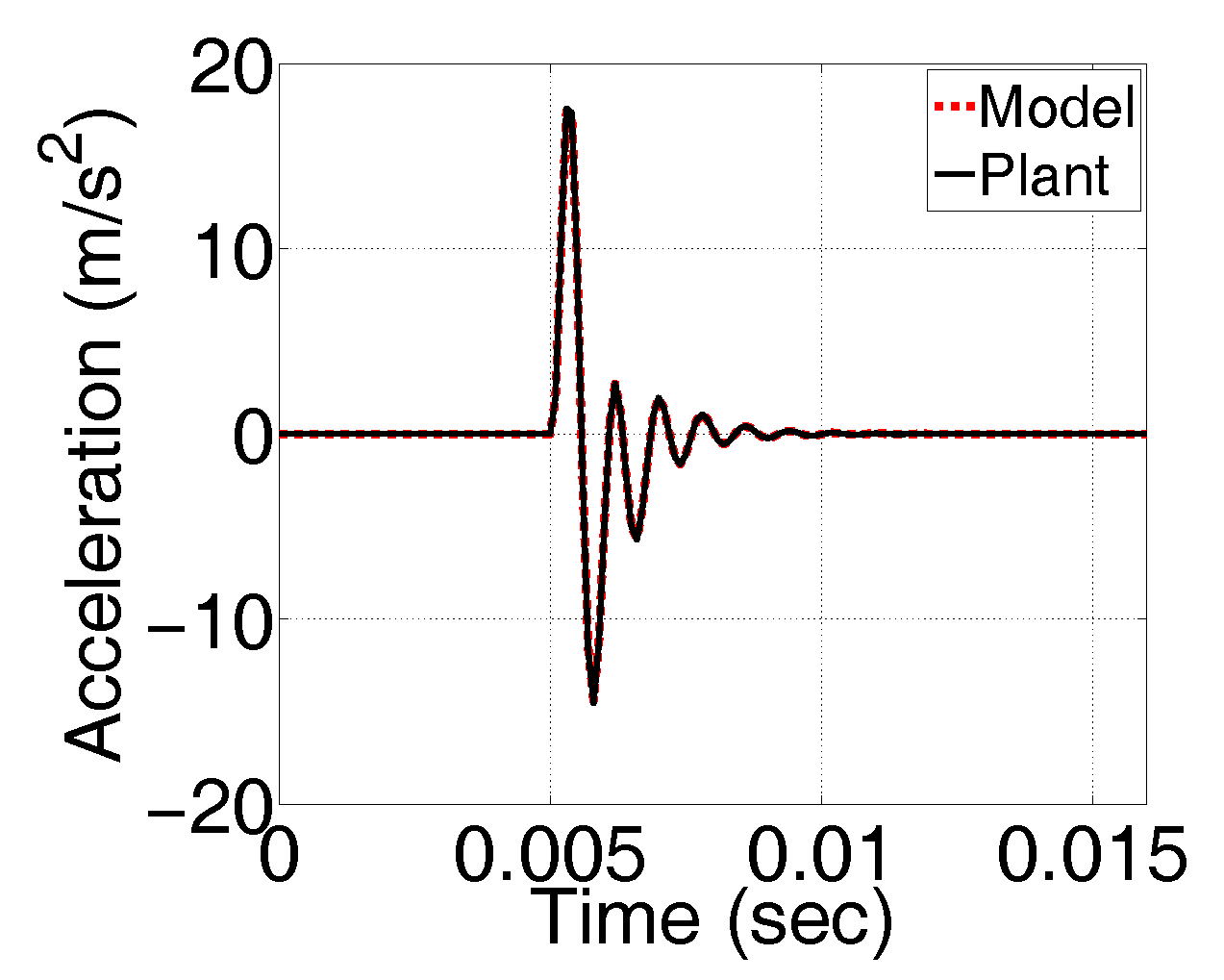
3.4. Two-Weight Notch FxLMS Filter with Offline Modelling
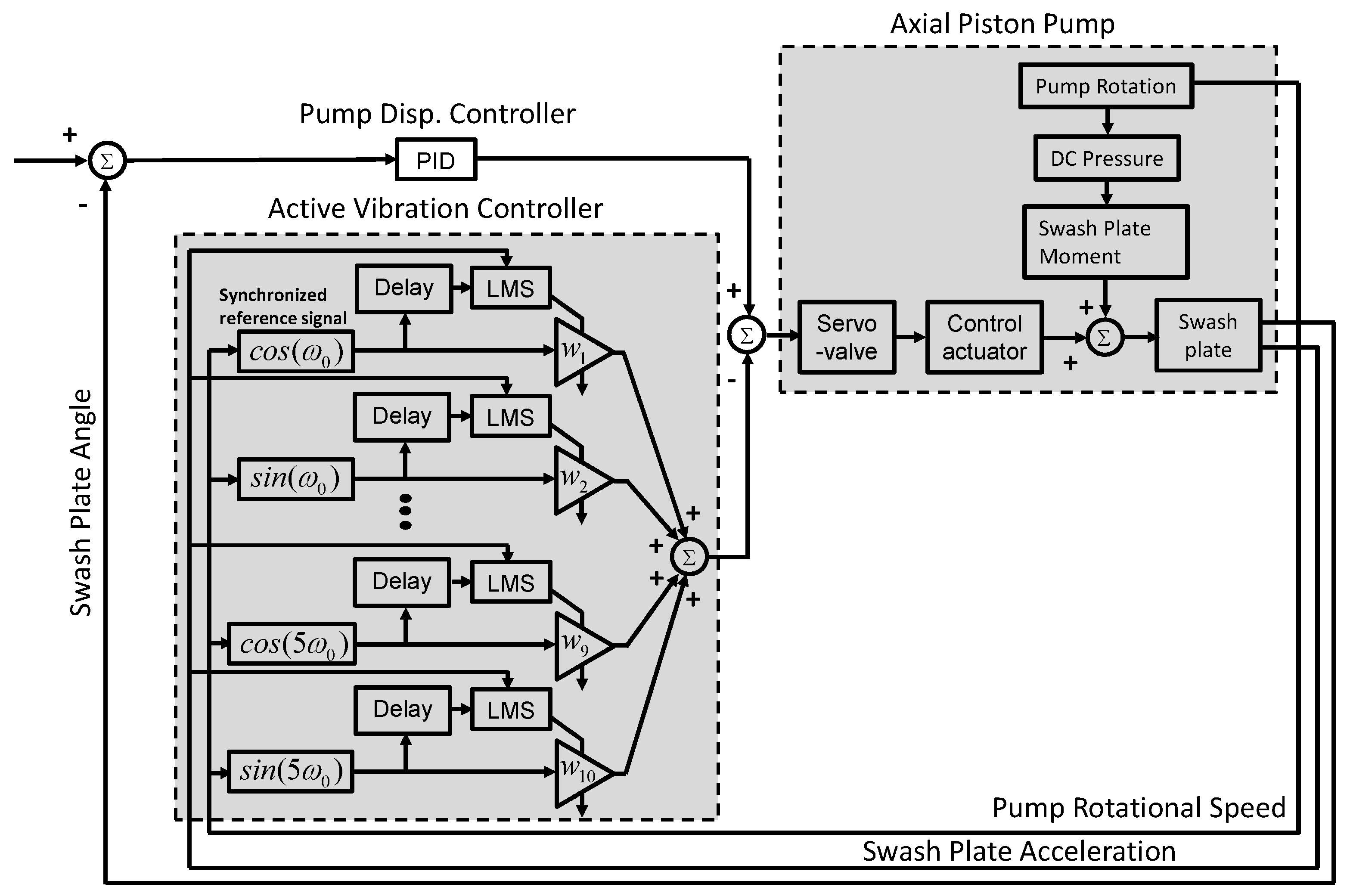
3.5. Swash Plate Active Vibration Controller
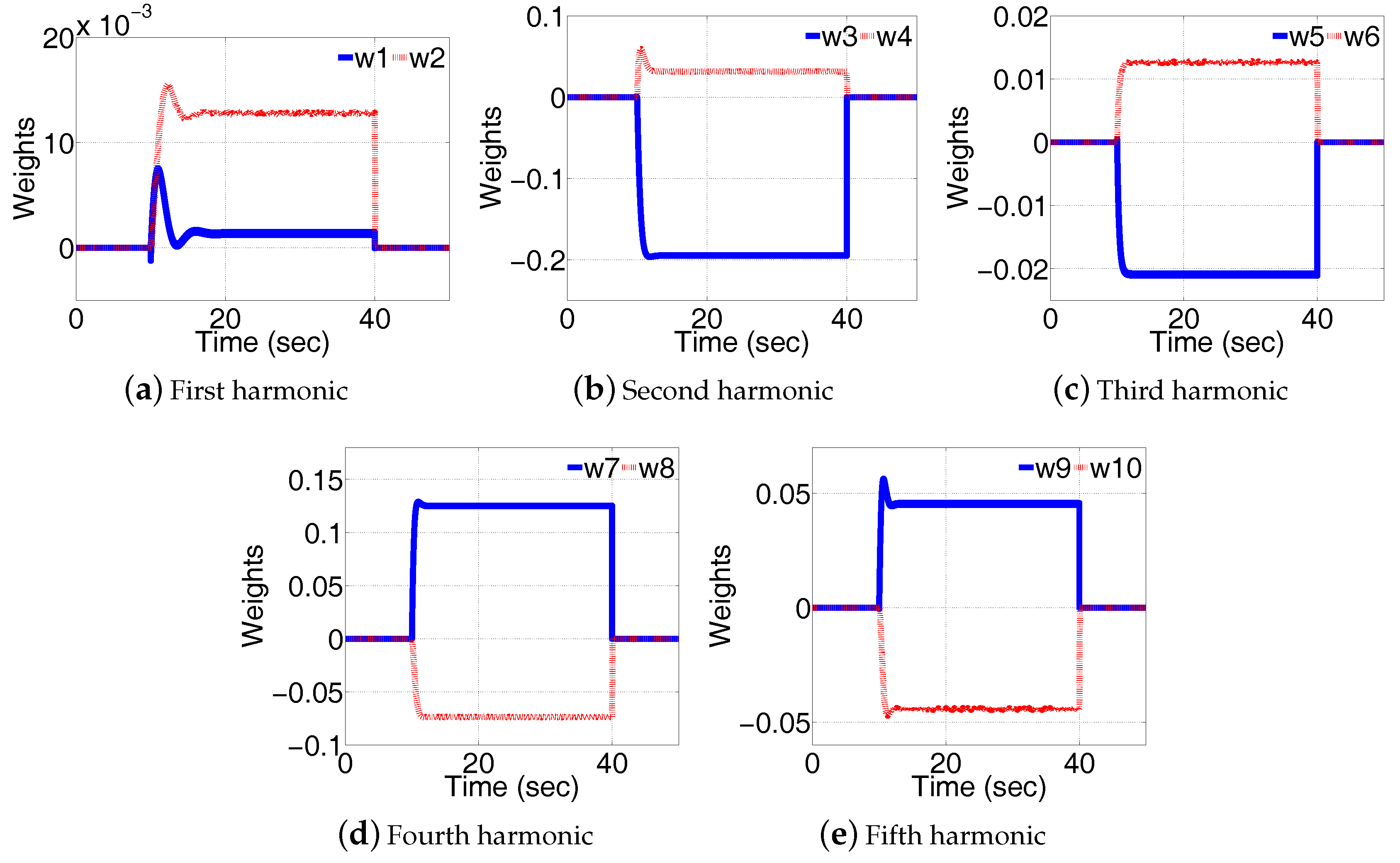
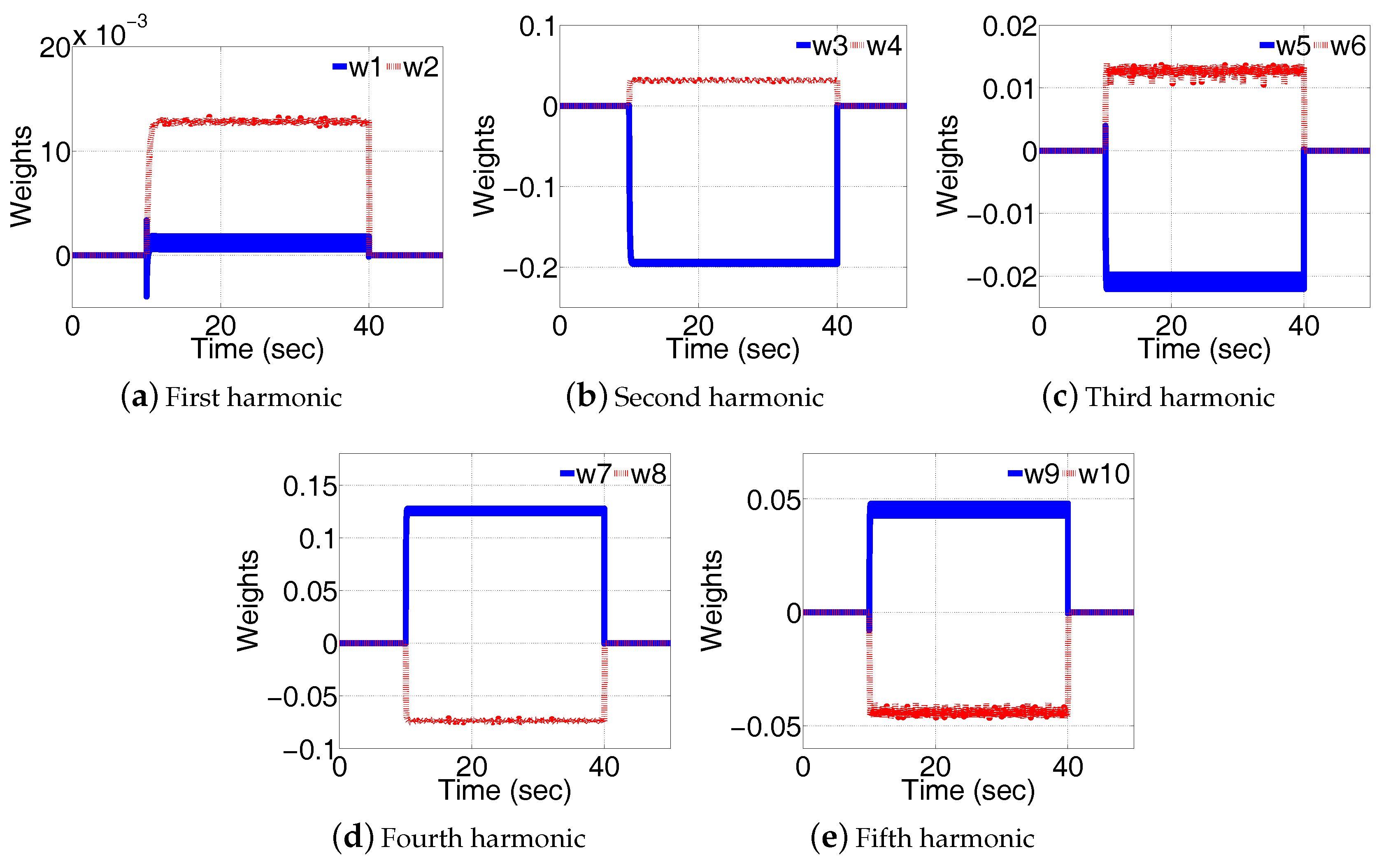
3.6. Swash Plate Active Vibration Control Simulation
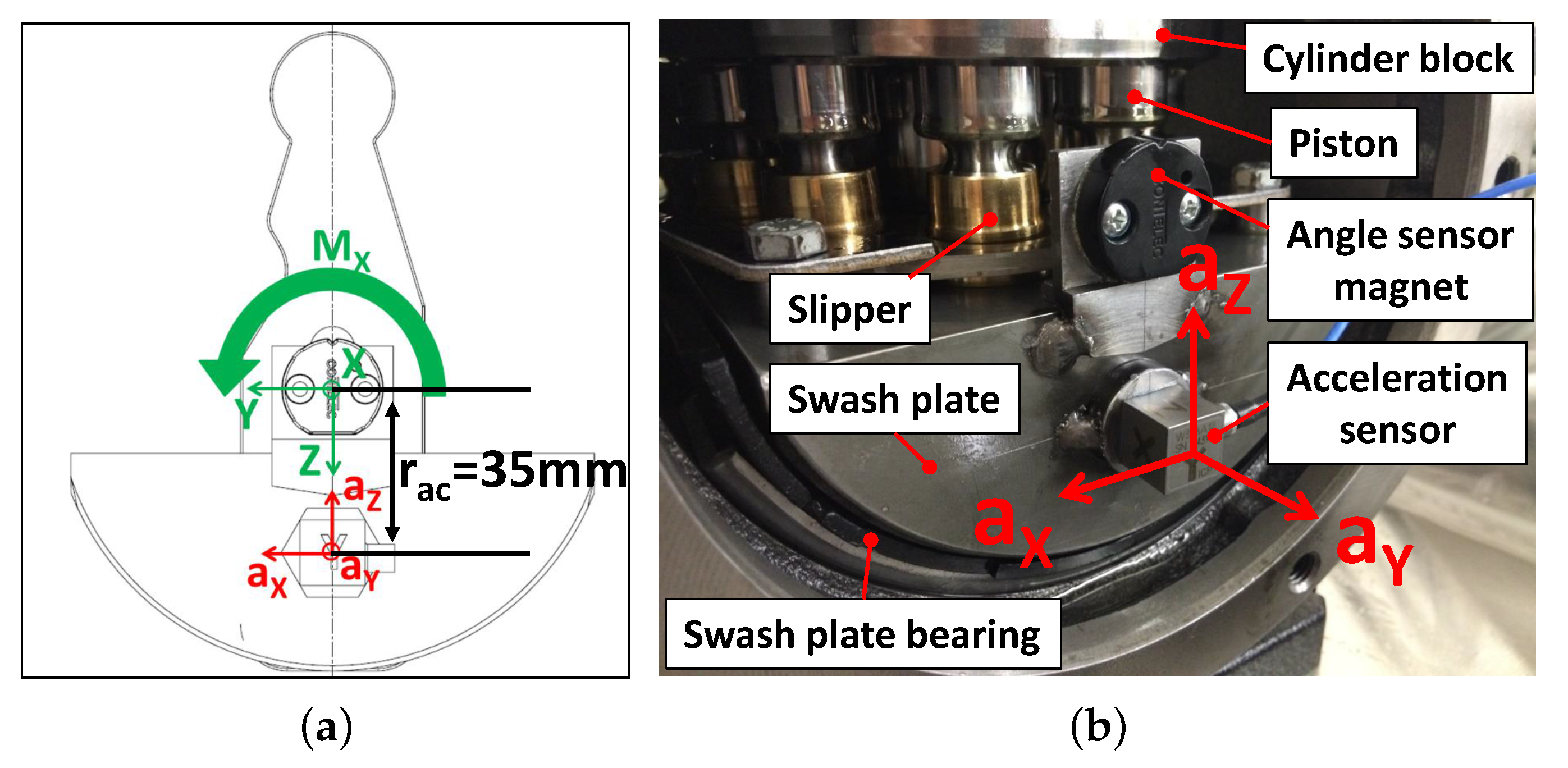
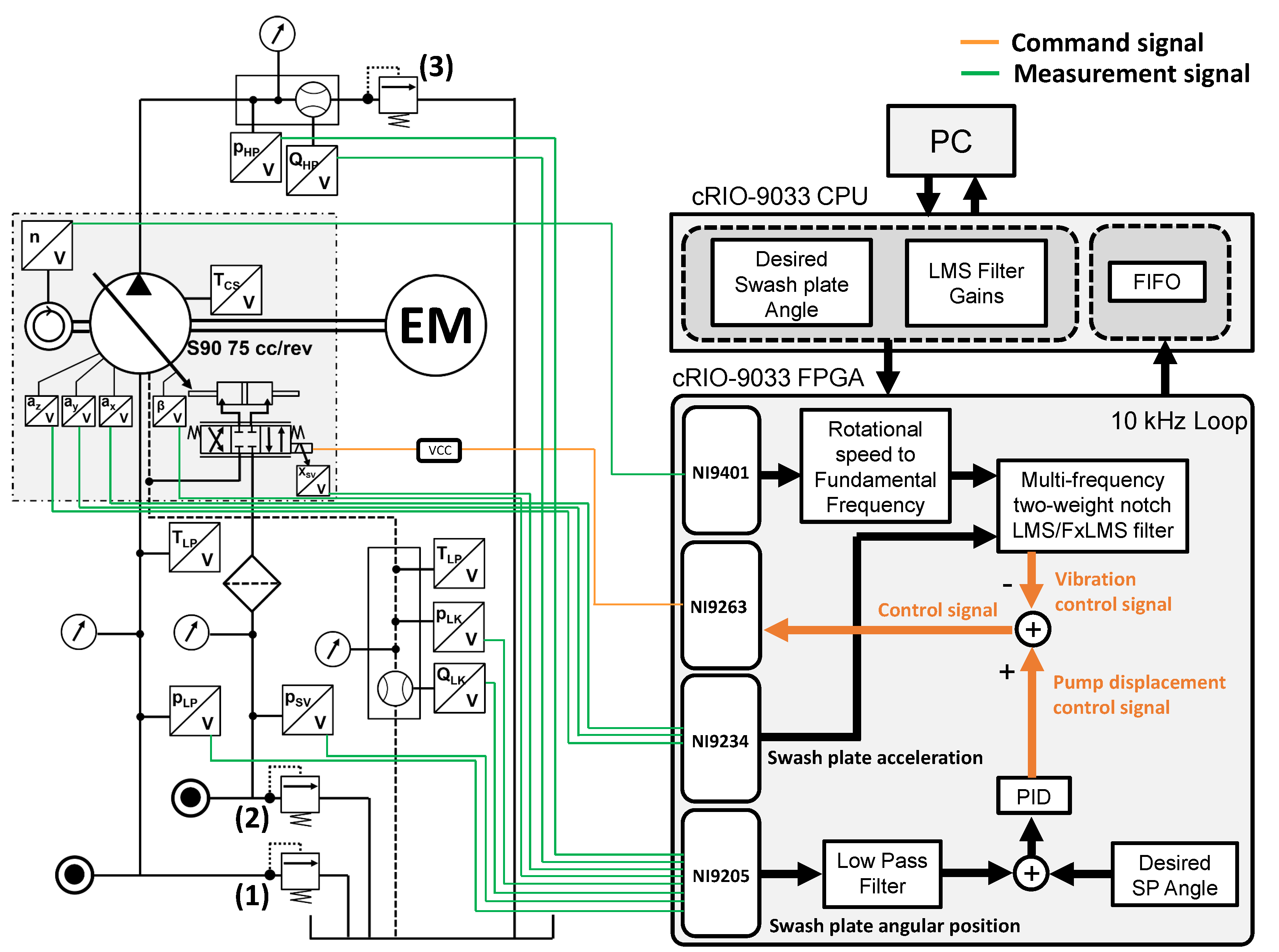
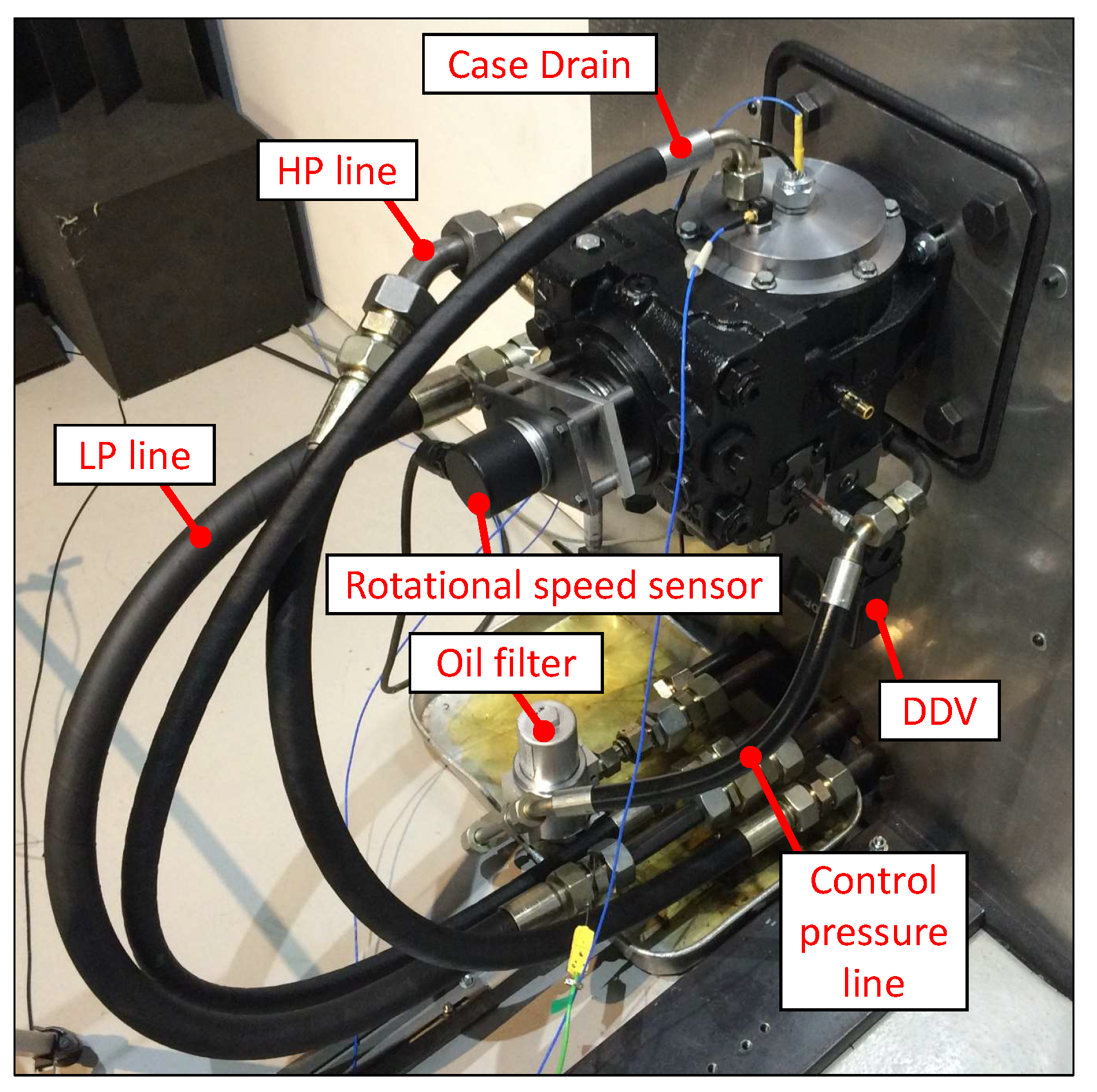
4. Active Vibration Control Pump Development
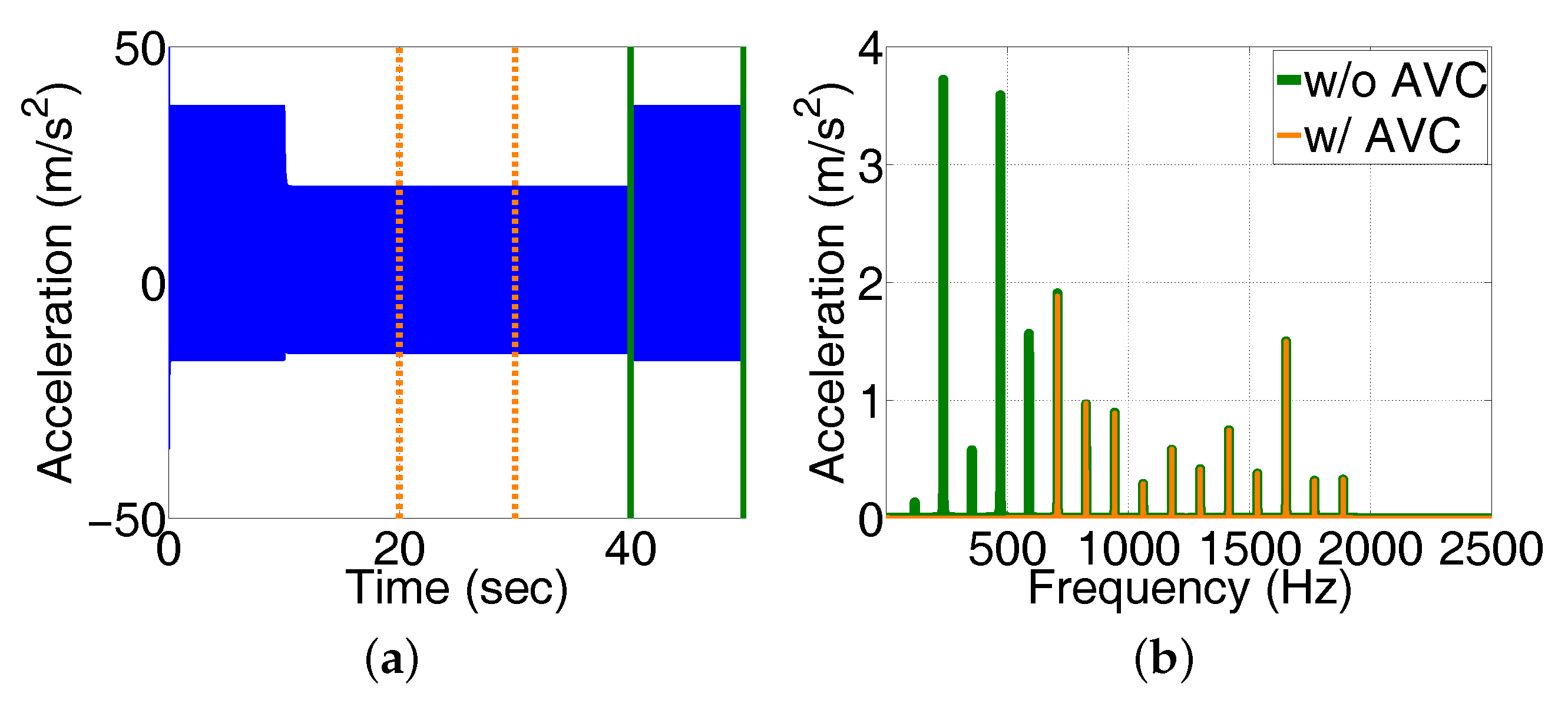
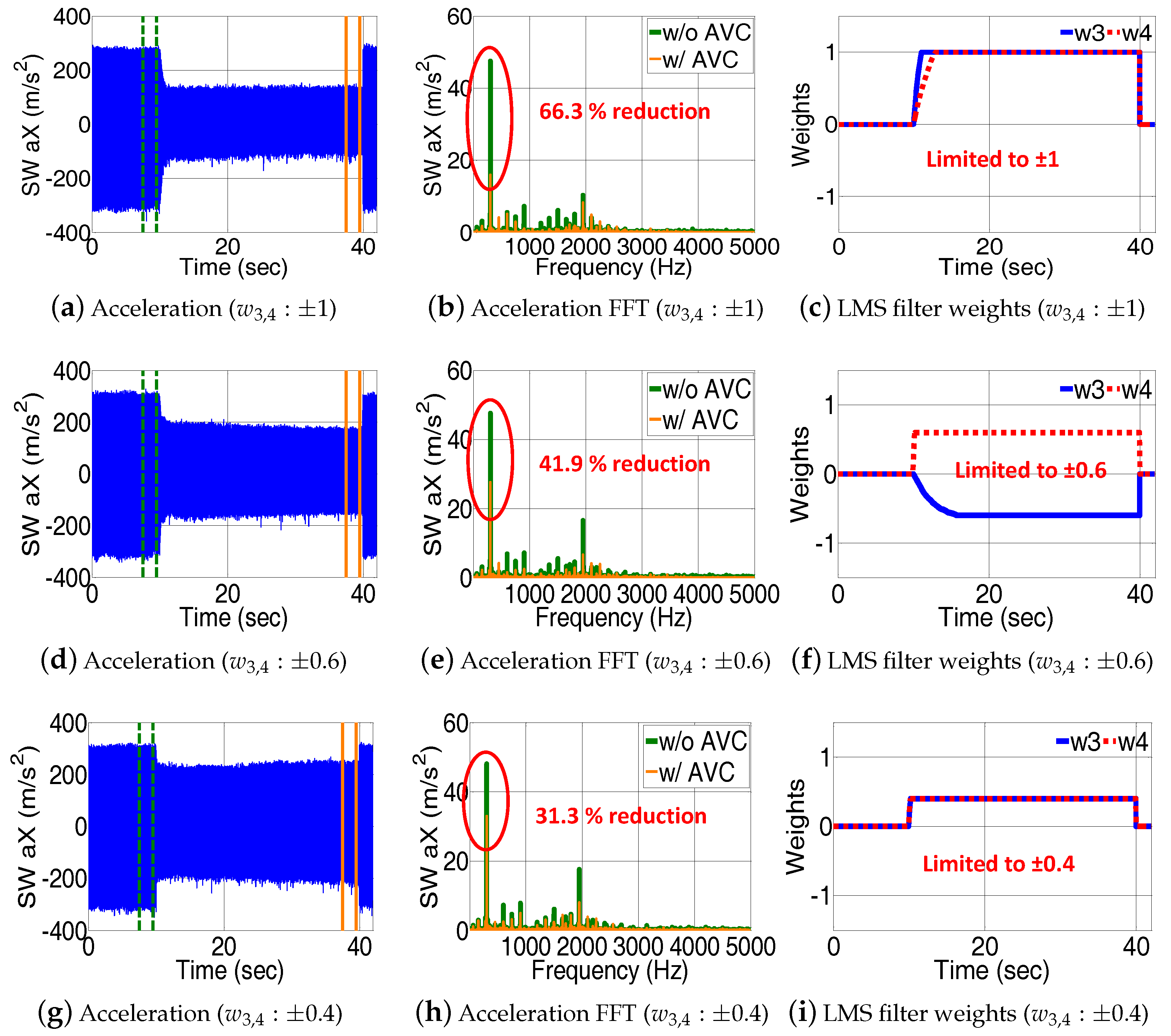
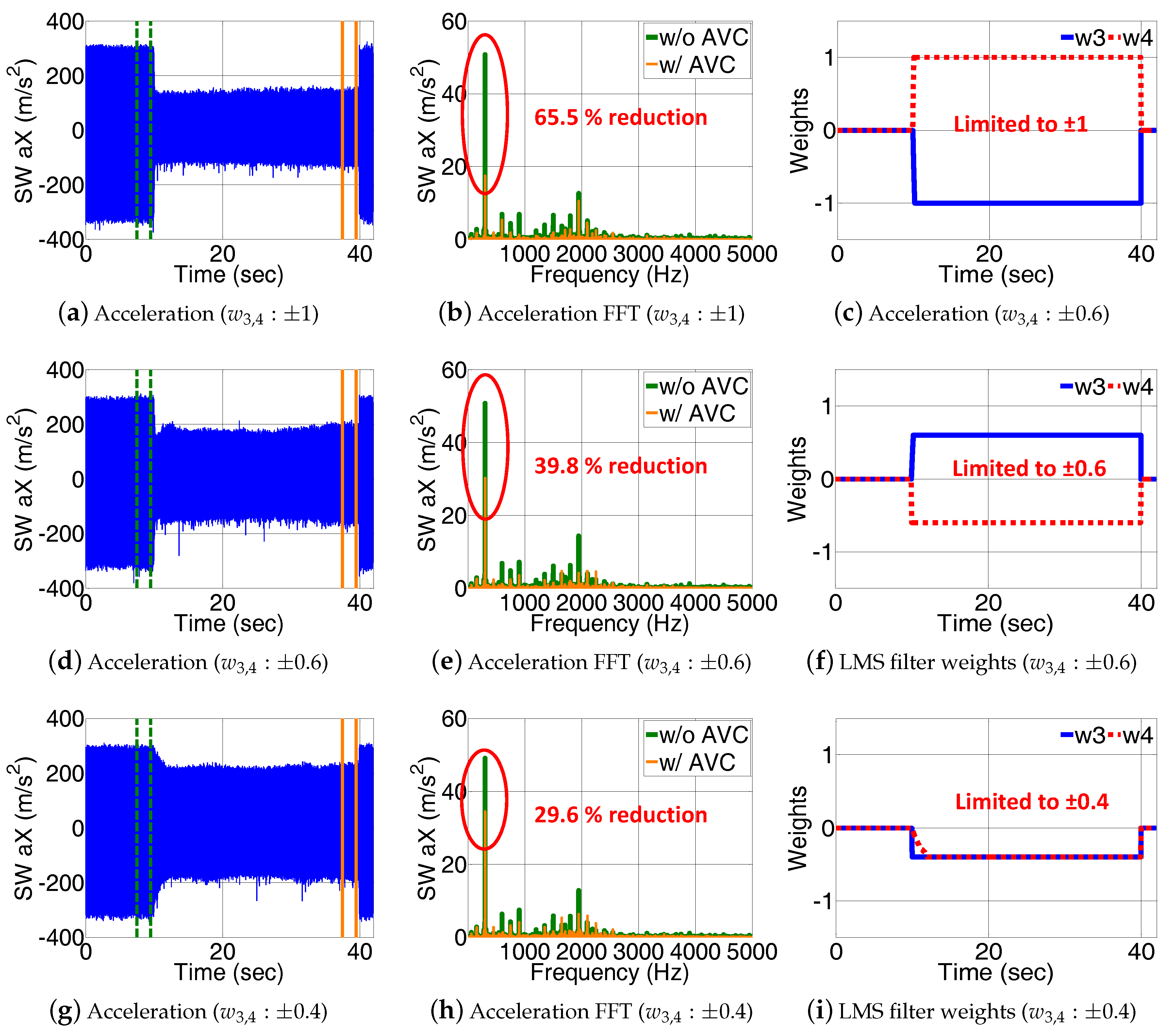
5. Swash Plate Vibration Experimental Test Results
6. Conclusions
Author Contributions
Conflicts of Interest
Nomenclature
| Symbols | Description | Units |
| M | Moment | Nm |
| a | Acceleration | m/s2 |
| Fundamental frequency of swash plate moment | Hz | |
| Sensor position from the rotational axis | m | |
| Swash plate lever arm length | m | |
| F | Force | N |
| p | Pressure | Pa |
| Q | Flow rate | m3/s |
| Control actuator piston area | m2 | |
| x | Control actuator displacement | m |
| m | Mass | kg |
| Hydraulic capacitance | m3/Pa | |
| Effective inertia of control system | kg·m2 | |
| Coefficient of Coulomb friction force | N | |
| Coefficient of viscous friction | N·s/m | |
| Coefficient of static friction force | N | |
| Bulk modulus of oil | Pa | |
| Leakage coefficient from control cylinder to case | m3/Pa·s | |
| V | Volume | m3 |
| Servovalve stroke | m | |
| Servovalve natural frequency | rad/s | |
| Frequency of reference signal | rad/s | |
| z | Number of pistons | - |
| Servovalve damping ratio | - | |
| e | Error of adaptive filter | - |
| d | Desired response of adaptive filter | - |
| y | Output of adaptive filter | - |
| W | Weight vector of adaptive filter | - |
| Convergence rate of adaptive filter | - | |
| L | Length of adaptive filter | - |
| Delay in signal | - | |
| Mean square error | - | |
| ∇ | Gradient operator | - |
| n | Rotational speed | rpm |
| T | Temperature | °C |
| V | Voltage | V |
| Acronyms | Description | |
| AVC | Active vibration control | |
| LMS | Least mean square | |
| FxLMS | Filtered-x least mean square | |
| TNLMS | Two-weight notch least means square | |
| TNFxLMS | Two-weight notch filtered-x least means square | |
| MTNLMS | Multi-frequency two-weight notch least means square | |
| MTNFxLMS | Multi-frequency two-weight notch filtered-x least means square | |
| FFT | Fast fourier transform | |
| VCC | Voltage to current converter | |
| EM | Electric motor | |
| SW | Swash plate | |
| FIFO | First-in first-out |
References
- Ivantysyn, J.; Ivantysynova, M. Hydrostatic Pumps and Motors; Akademia Books International: New Delhi, India, 2001. [Google Scholar]
- Edge, K. Designing quieter hydraulic systemssome recent developments and contributions. Jpn. Fluid Power Syst. Soc. 1999, 1999, 3–27. [Google Scholar] [CrossRef]
- Pettersson, M.; Weddfelt, K.; Palmberg, J. Prediction of structural and audible noise from axial piston pumps using transfer functions. In Proceedings of the Eighth Bath International Fluid Power Workshop on Design and Performance, Bath, UK, 15–17 September 1995. [Google Scholar]
- Ramdén, T.; Petter, K.; Palmberg, J.O. Reliability and sensitivity analysis of a condition monitoring technique. Jpn. Fluid Power Syst. Soc. 1996, 1996, 567–572. [Google Scholar] [CrossRef]
- Du, H.; Carlson, D.J. Fatigue life improvement of the roller swashplate bearing of an axial swashplate type piston pump. In Proceedings of the BATH/ASME Symposium on Fluid Power and Motion Control, Bath, UK, 10–14 September 2014. [Google Scholar]
- Masuda, K.; Ohuchi, H. Noise reduction of a variable piston pump with even number of cylinders. Jpn. Fluid Power Syst. Soc. 1996, 1996, 91–96. [Google Scholar] [CrossRef]
- Ohuchi, H.; Masuda, K. Active noise control of a variable displacement axial piston pump with even number of cylinders. Jpn. Fluid Power Syst. Soc. 1999, 1999, 79–84. [Google Scholar] [CrossRef]
- Ohuchi, H.; Masuda, K.; Osada, T. Noise reduction of a variable displacement axial piston pump by compensating the exciting force (experimental verification of the effect of compensation). In Proceedings of the JFPS International Symposium on Fluid Power, Nara, Japan, 12–15 November 2002; pp. 76–81. [Google Scholar]
- Kim, T.; Ivantysynova, M. Active vibration control of axial piston machine using higher harmonic least mean square control of swash plate. In Proceedings of the 10th IFK International Conference on Fluid Power, Dresden, Germany, 8–10 March 2016; pp. 91–104. [Google Scholar]
- Ahuja, K.; Stevens, J.C. Recent advances in active noise control. AIAA J. 1991, 29, 1058–1067. [Google Scholar] [CrossRef]
- Grabbel, J.; Ivantysynova, M. An investigation of swash plate control concepts for displacement controlled actuators. Int. J. Fluid Power 2005, 6, 19–36. [Google Scholar] [CrossRef]
- Widrow, B.; Walach, E. Adaptive Inverse Control A Signal Processing Approach; Reissue, Ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008. [Google Scholar]
- Kuo, S.M.; Morgan, D. Active Noise Control Systems: Algorithms and DSP Implementations; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1995. [Google Scholar]
- Widrow, B.; Glover, J.R., Jr.; McCool, J.M.; Kaunitz, J.; Williams, C.S.; Hearn, R.H.; Zeidler, J.R.; Eugene Dong, J.; Goodlin, R.C. Adaptive noise cancelling: Principles and applications. Proc. IEEE 1975, 63, 1692–1716. [Google Scholar] [CrossRef]
- Glover, J.R., Jr. Adaptive noise canceling applied to sinusoidal interferences. IEEE Trans. Acoust. Speech Signal Process. 1977, 25, 484–491. [Google Scholar] [CrossRef]
- Elliott, S.J.; Nelson, P.A. The Application of Adaptive Filtering to The Active Control of Sound and Vibration; University of Southampton Institute of Sound and Vibration Research: Southampton, UK, 1985. [Google Scholar]
- Widrow, B.; Stearns, S.D. Adaptive Signal Processing; Prentice-Hall: Englewood Cliffs, NJ, USA, 1985; Volume 1. [Google Scholar]
- Morgan, D.R.; Sanford, C. A control theory approach to the stability and transient analysis of the filtered-x LMS adaptive notch filter. IEEE Trans. Signal Process. 1992, 40, 2341–2346. [Google Scholar] [CrossRef]

















© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, T.; Ivantysynova, M. Active Vibration Control of Swash Plate-Type Axial Piston Machines with Two-Weight Notch Least Mean Square/Filtered-x Least Mean Square (LMS/FxLMS) Filters. Energies 2017, 10, 645. https://doi.org/10.3390/en10050645
Kim T, Ivantysynova M. Active Vibration Control of Swash Plate-Type Axial Piston Machines with Two-Weight Notch Least Mean Square/Filtered-x Least Mean Square (LMS/FxLMS) Filters. Energies. 2017; 10(5):645. https://doi.org/10.3390/en10050645
Chicago/Turabian StyleKim, Taeho, and Monika Ivantysynova. 2017. "Active Vibration Control of Swash Plate-Type Axial Piston Machines with Two-Weight Notch Least Mean Square/Filtered-x Least Mean Square (LMS/FxLMS) Filters" Energies 10, no. 5: 645. https://doi.org/10.3390/en10050645
APA StyleKim, T., & Ivantysynova, M. (2017). Active Vibration Control of Swash Plate-Type Axial Piston Machines with Two-Weight Notch Least Mean Square/Filtered-x Least Mean Square (LMS/FxLMS) Filters. Energies, 10(5), 645. https://doi.org/10.3390/en10050645