Reducing Fuel Consumption in Hydraulic Excavators—A Comprehensive Analysis

Abstract
:1. Introduction
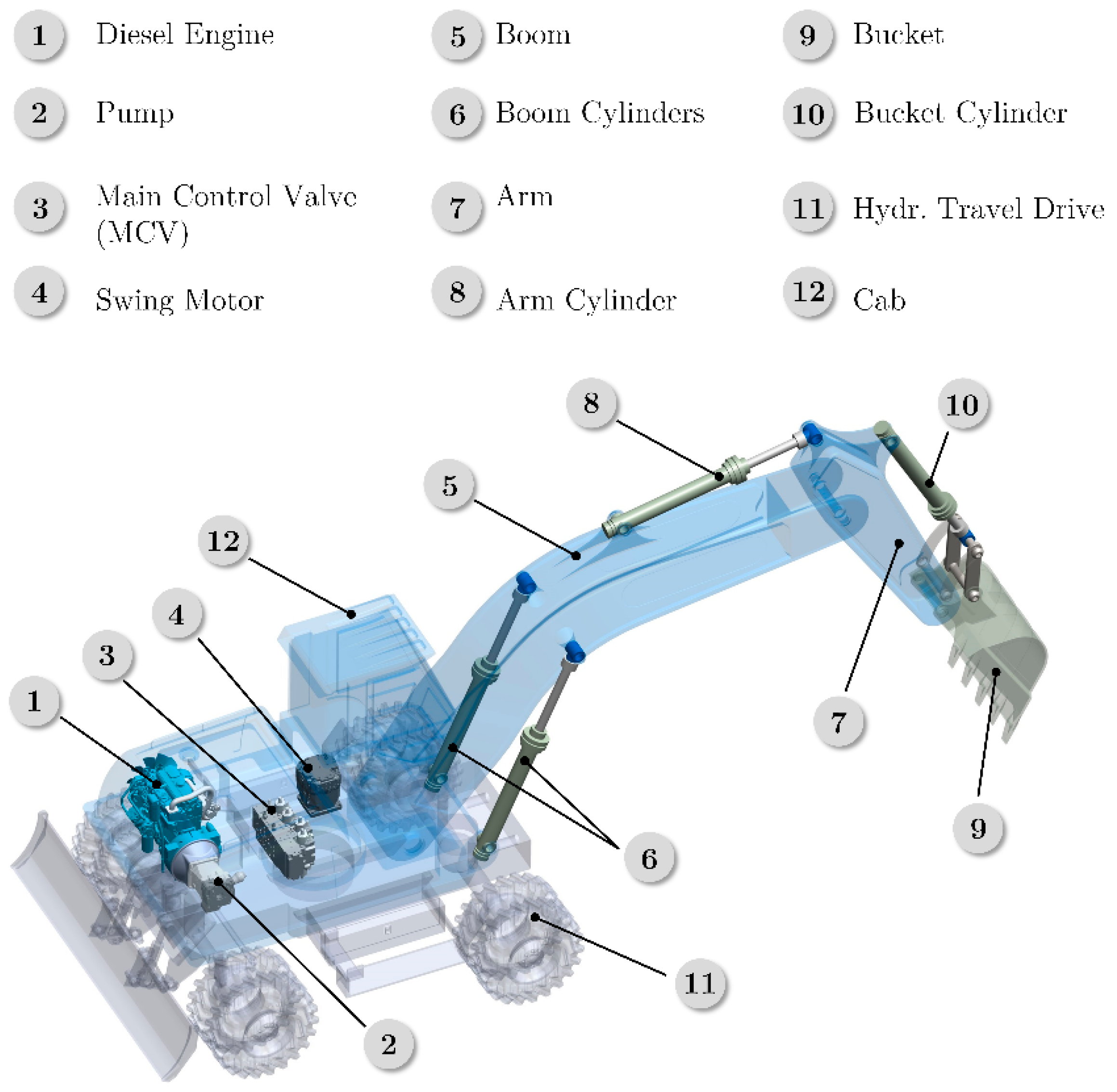
2. Review of Components and Subsystems
2.1. Engine
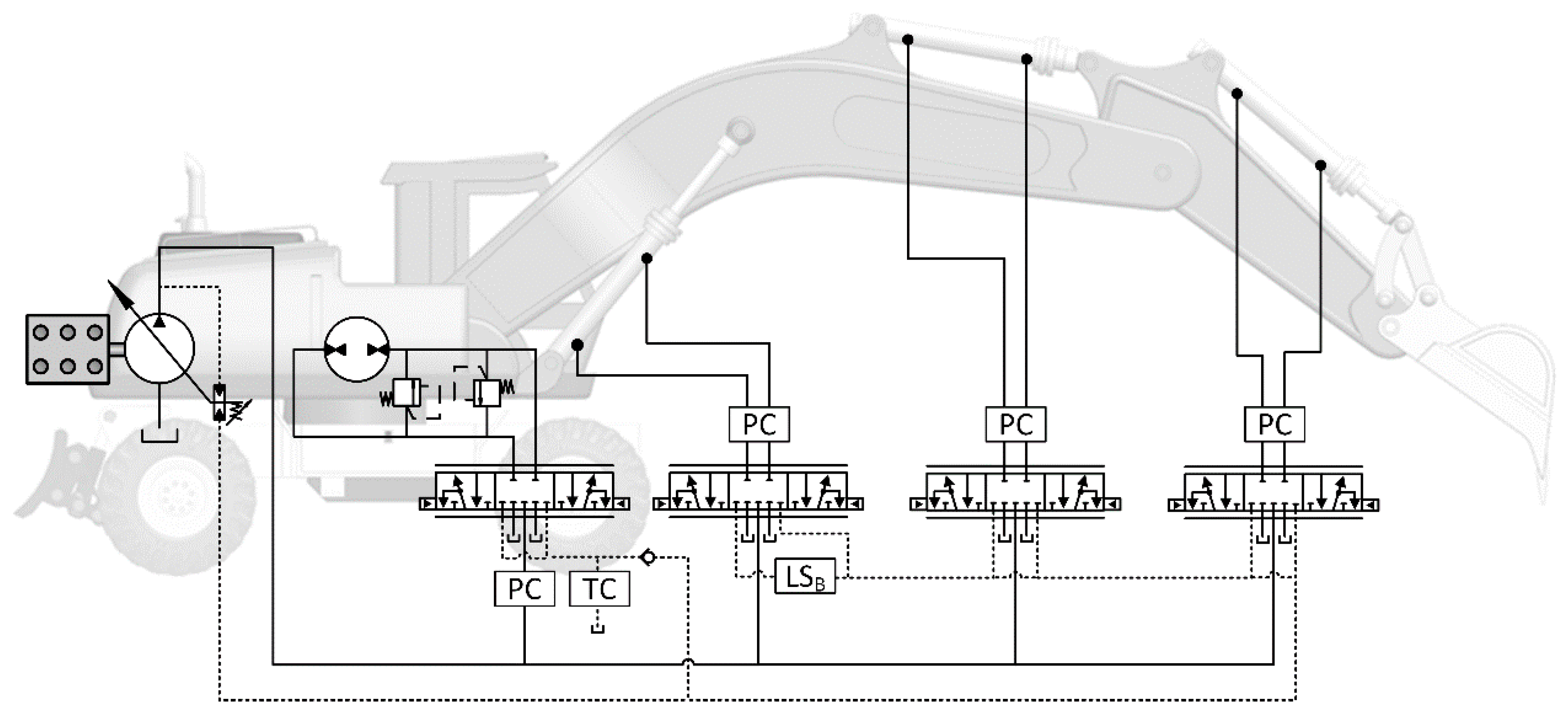
2.2. Hydraulic System
2.2.1. Pump Losses
2.2.2. Valve Losses
- Throttling across the inlet edge in order to supply the actuator with flow
- Throttling across the outlet edge to maintain controllability and prevent runaway loads
- Throttling to equalise mismatched supply and actuator pressures
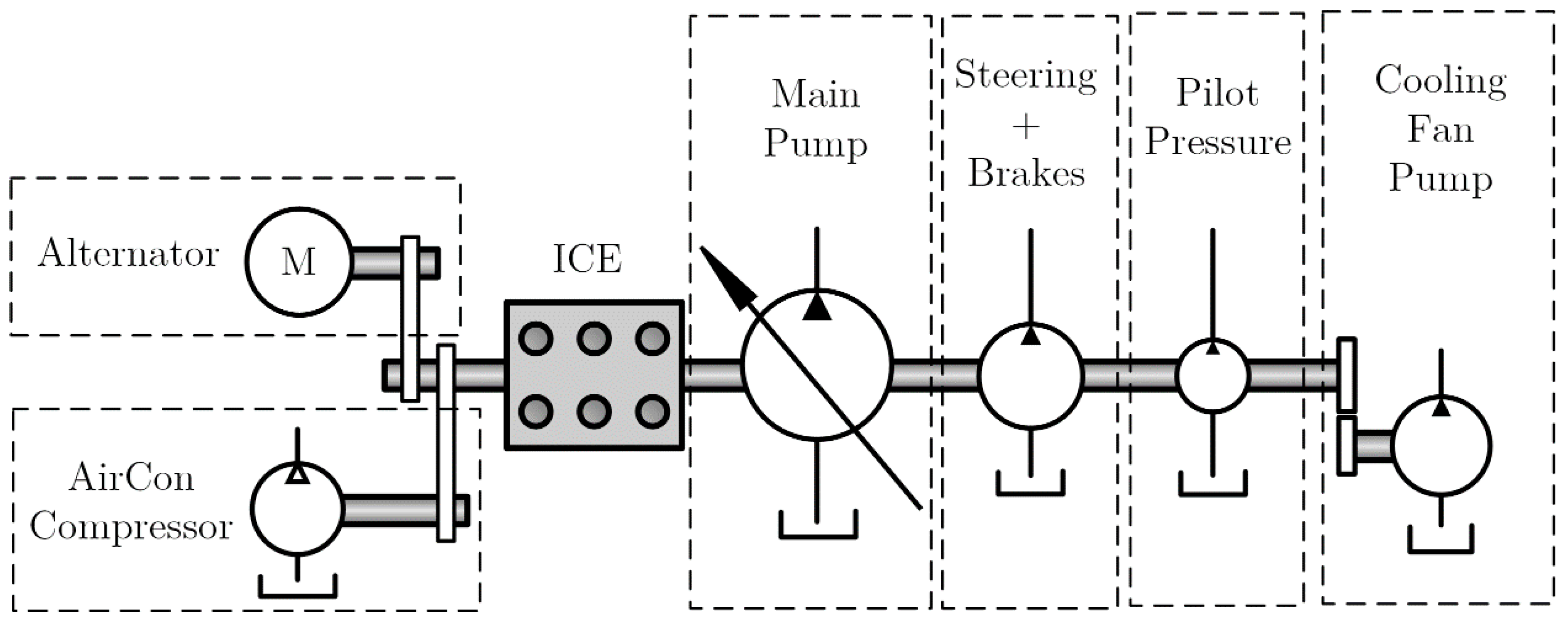
2.3. Ancillary Drives
- The alternator regulating the machine’s 24 V electrical system;
- The air conditioning compressor unit;
- A number of hydraulic gear pumps providing pressure for the joysticks as well as for the steering, braking and cooling systems. It should be noted that crawler type excavators do not have a separate steering system and therefore do not require a pump supplying steering pressure.
3. Cycle Analysis
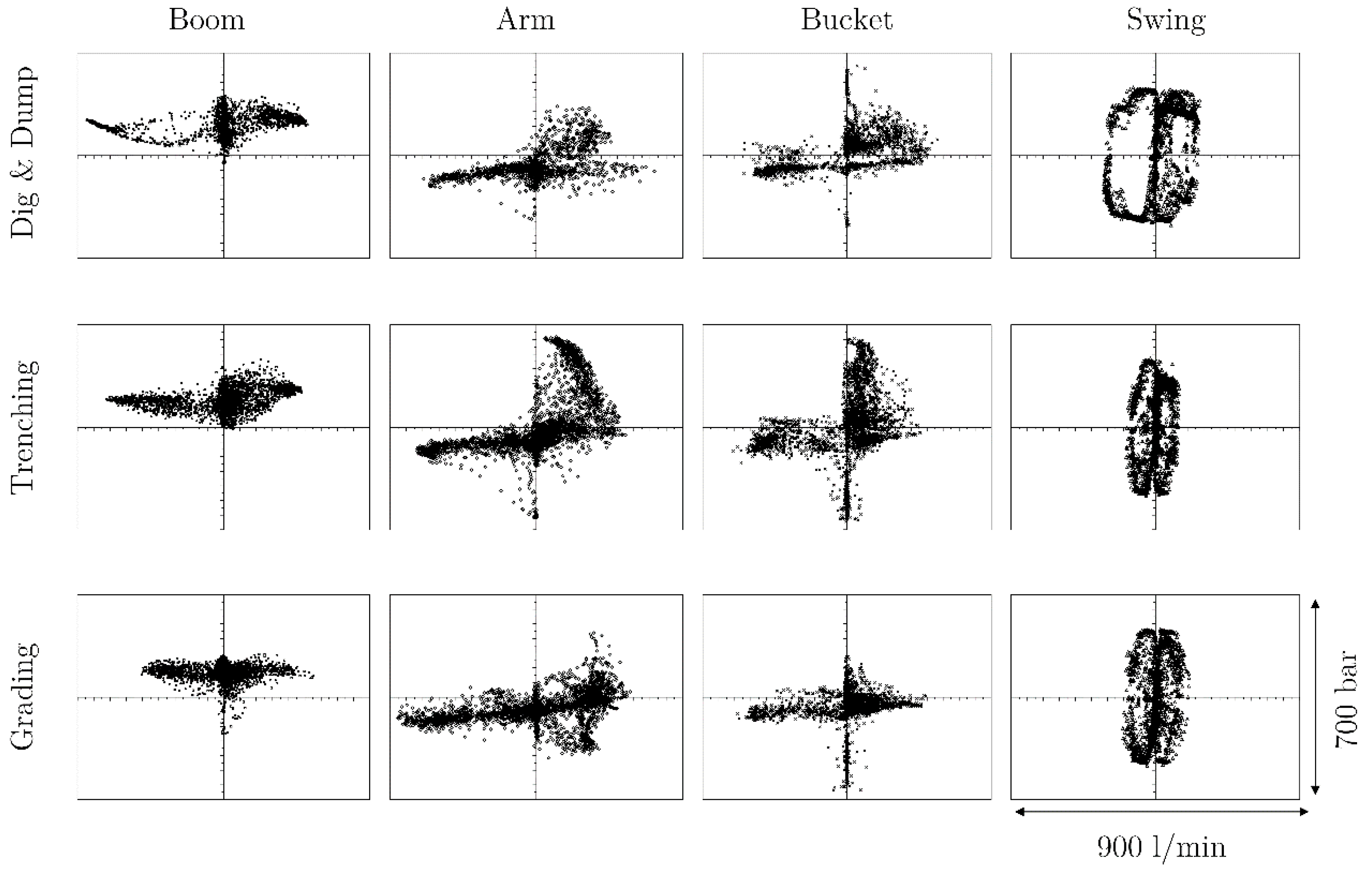
3.1. Characteristics of Typical Duty Cycles
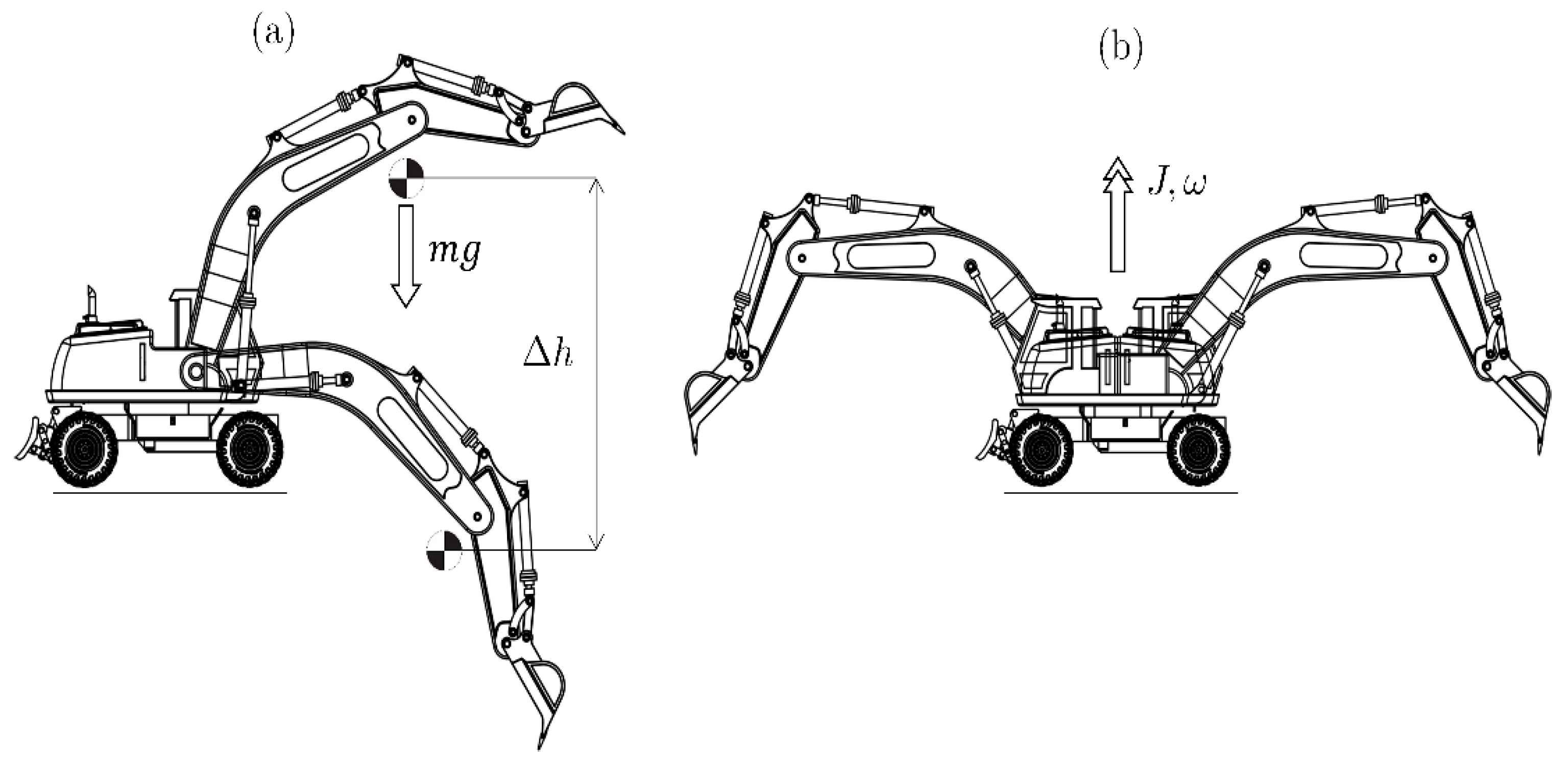
3.2. Energy Recovery in Excavators
- Which actuator has the highest amount of recoverable energy?
- Should this energy be stored or can it be reused immediately?
- How difficult, or in other words feasible, is it to recover energy from each of these actuators?
- How much of the energy sent to the various actuators can be recovered?
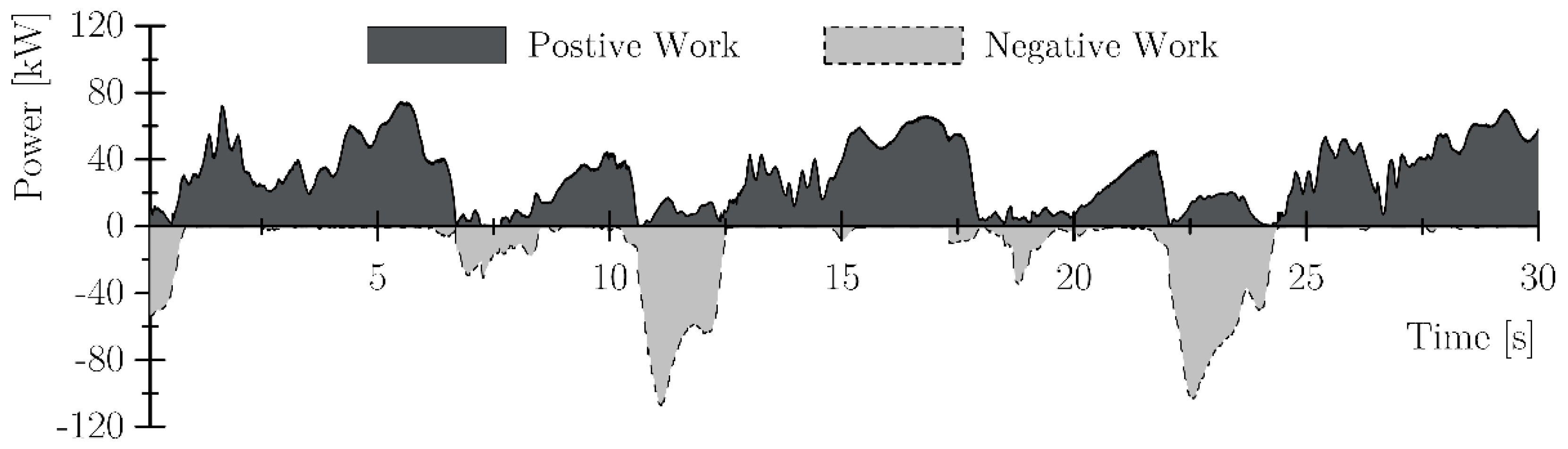
- Average power requirements are considerably lower than peak power requirements.
- Actuator power can be positive (lifting, accelerating) or negative (lowering, decelerating). The peak negative power can reach levels similar to the rated engine power.
- Demand profiles (pressure and flow rate) of all actuators vary independently of each other. Some actuators require high pressure and low flow rate, while others may require a low pressure and high flow rate.
- Idling is common.
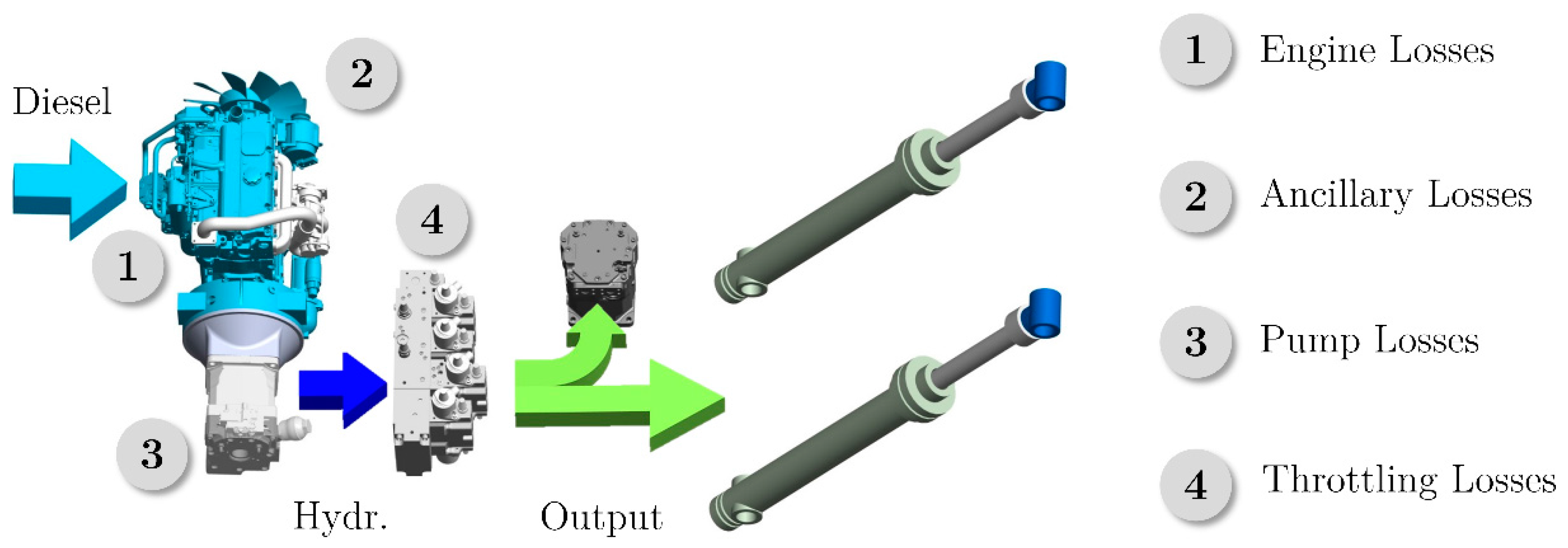
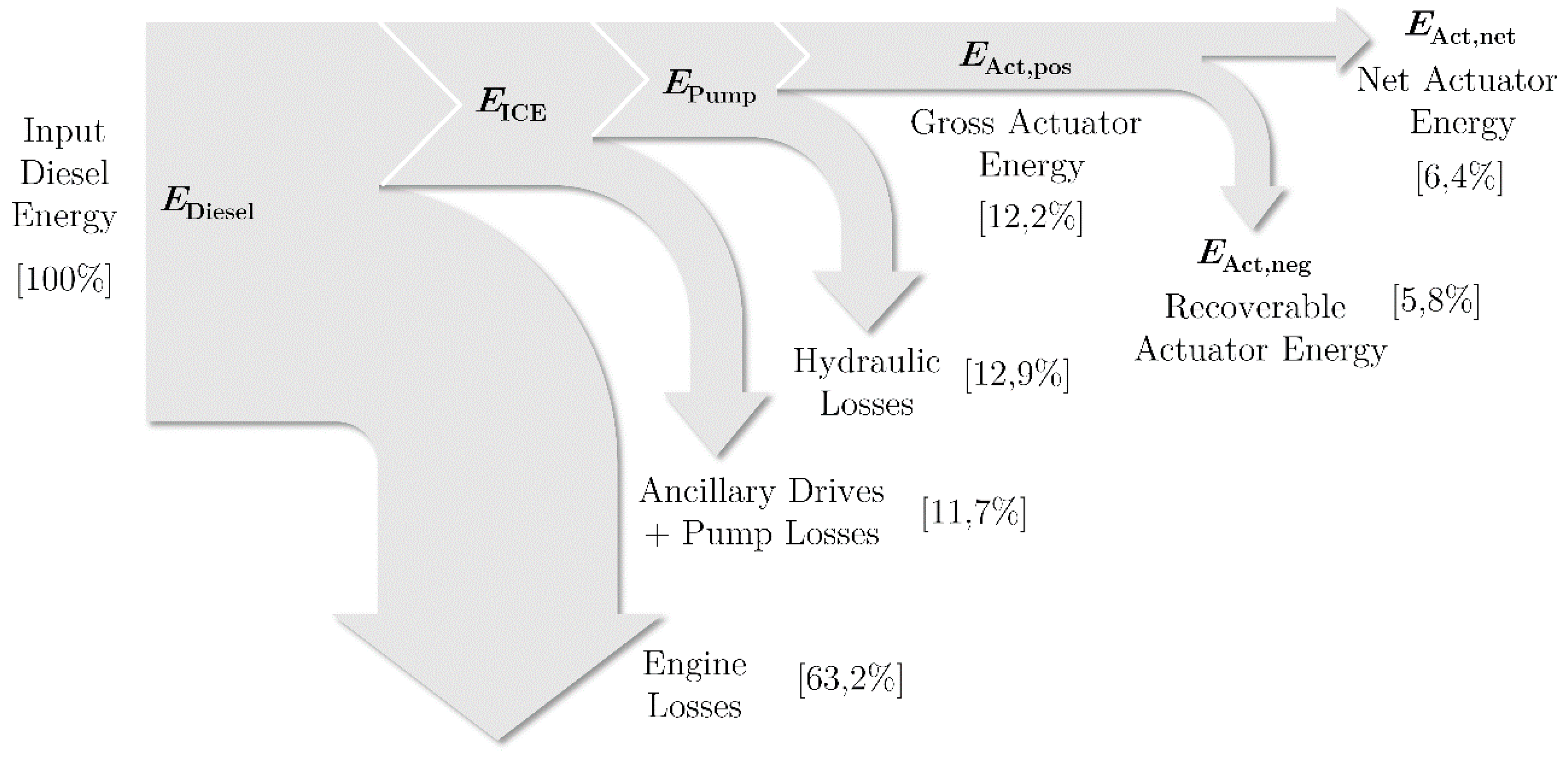
4. Defining Efficiency and Quantifying Losses
4.1. System Efficiency
4.2. Absolute Losses and Fuel Consumption
4.3. Model Validation
5. Predicting Fuel Consumption Improvements
5.1. Saving Fuel by Lowering Hydraulic Losses
5.2. Saving Fuel by Lowering Idle Losses
5.3. Saving Fuel through Energy Recovery
5.4. Saving Fuel through Holistic Approach
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Abekawa, T.; Tanikawa, Y.; Hirosawa, A. Introduction of Komatsu Genuine Hydraulic Oil KOMHYDRO HE; Komatsu Technical Report; Yumpu: Komatsu, Japan, 2010; Volume 56, No. 163. [Google Scholar]
- Ohira, S.; Suehiro, M.; Ota, K.; Kawamura, K. Use of emission rights for construction machinery to help prevent global warming. Hitachi Rev. 2013, 62, 123–130. [Google Scholar]
- Bloomfield, L.A. How Things Work: The Physics of Everyday Life; John Wiley & Sons: Inc.: Hoboken, NJ, USA, 2013. [Google Scholar]
- Pragmatic Efficiency Limits for Internal Combustion Engines, Readout Guest Forum. 2014. Available online: http://www.horiba.com/publications/readout/article/pragmatic-efficiency-limits-for-internal-combustion-engines-31871/ (accessed on 7 October 2016).
- Hanlon, M. Most Powerful Diesel Engine in the World, Gizmag. Available online: http://www.gizmag.com/go/3263/ (accessed on 7 October 2016).
- Frei, B. Regelung Eines Elektromechanischen Getriebes für Hybridfahrzeuge. Ph.D. Thesis, Technical University Chemnitz, Chemnitz, Germany, 2006. [Google Scholar]
- Yang, J.; Quan, L.; Yang, Y. Excavator energy-saving efficiency based on diesel engine cylinder deactivation technology. Chin. J. Mech. Eng. 2012, 25. [Google Scholar] [CrossRef]
- Liebl, J.; Lederer, M.; Rohde-Brandenburger, K.; Biermann, J.-W.; Roth, M.; Schäfer, H. Energiemanagement im Kraftfahrzeug; Springer: Wiesbaden, Germany, 2014. [Google Scholar]
- Rohde-Brandenburger, K. Was bringen 100 kg Gewichtsreduzierung im Verbrauch? In ATZ; Springer: Wiesbaden, Germany, 2013; Volume 115. [Google Scholar]
- Guzzella, L.; Sciaretta, A. Vehicle Propulsion Systems; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Wilde, A. Eine Modulare Funktionsarchitektur für Adaptives Und Vorausschauendes Energiemanagement in Hybridfahrzeugen. Ph.D. Thesis, Technical University Munich, München, Germany, 2008. [Google Scholar]
- Smil, V. Energy: A Beginner’s Guide; Oneworld Publications: London, UK, 2006. [Google Scholar]
- Chiatti, G.; Chiavola, O.; Falcucci, G. Soot Morphology Effects on DPF Performance; SAE Technical Paper 2009-01-1279; SAE: Warrendale, PA, USA, 2009. [Google Scholar] [CrossRef]
- Falcucci, G. A lumped parameter model for diesel soot morphology evaluation and emission control. Proc. Instit. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 987–998. [Google Scholar] [CrossRef]
- Filla, R. Getting Real about Test Cycles; SAE International Off-Highway Engineering: Warrendale, PA, USA, 2013; ISSN 1528-9702. [Google Scholar]
- Terdich, N. Impact of Electrically Assisted Turbocharging on the Transient Response of an Off-Highway Diesel Engine. Ph.D. Thesis, Imperial College London, London, UK, 2015. [Google Scholar]
- Hanson, P.A.; Lindgren, M.; Nordin, M.; Pettersson, O. A methodology for measuring the effects of transient loads on the fuel efficiency of agricultural tractors. Appl. Eng. Agric. 2003, 19. [Google Scholar] [CrossRef]
- Lindgren, M.; Hansson, P.-A. Effects of transient conditions on exhaust emissions from two non-road diesel engines. Biosyst. Eng. 2004, 87, 57–66. [Google Scholar] [CrossRef]
- Forschungsdialog: Erfolgsprojekt STEAM, O+P Ölhydraulik und Pneumatik 07/08; Vereinigte Fachverlage: Mainz, Germany, 2016.
- Kunze, G.; Göhring, H.; Jacob, K. Baumaschinen: Erdbau-Und Tagesbaumaschinen; Vieweg Verlag: Wiesbaden, Germany, 2002. [Google Scholar]
- Holländer, C. Untersuchungen zur Beurteilung und Optimierung von Baggerhydrauliksystemen. Ph.D. Thesis, TU Braunschweig, Braunschweig, Germany, 1988. [Google Scholar]
- Herfs, W. LUDV-Steuerungen für Bagger. Europäische Mobiltagung, Lohr a. Main, Mannesmann Rexroth AG; Presentation (RD 00 207/10.97); Rexroth: Lohr, Germany, 1997. [Google Scholar]
- N.N. Caterpillar M318D Wheeled Excavator Brochure. Available online: http://www.cat.com/en_US/products/new/equipment/wheel-excavators/wheel-excavators/18115489.html (accessed on 7 October 2016).
- Kawasaki K3VL Axial piston pumps for open circuits in mobile. In Industrial and Marine Applications; Datasheet: Kawasaki, Japan, 2014.
- Sturm, C. Bewertung der Energieeffizienz von Antriebssystemen mobiler Arbeitsmaschinen am Beispiel Bagger. Ph.D. Thesis, Karlsruhe Institute of Technology, Karlsruhe, Germany, 2015. [Google Scholar]
- Vukovic, M.; Sgro, S.; Murrenhoff, H. STEAM—Hydraulic design for engine integration. O + P : Fluidtechnik für den Maschinen- und Anlagenbau 2015, 59. Available online: https://publications.rwth-aachen.de/record/466125 (accessed on 29 March 2017).
- Achten, P. Dynamic high-frequency behaviour of the swash plate in a variable displacement axial piston pump. J. Syst. Control Eng. 2013, 227, 1–12. [Google Scholar] [CrossRef]
- Lux, J.; Murrenhoff, H. Experimental loss analysis of displacement controlled pumps. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016. [Google Scholar]
- Zhang, J. Pressure compensated metering valve for EH systems. In Proceedings of the National Conference on Fluid Power, Las Vegas, NV, USA, 12–14 March 2008. [Google Scholar]
- Murrenhoff, H. Servohydraulik—Geregelte Hydraulische Antriebe, 4th ed.; Shaker: Aachen, Germany, 2012. [Google Scholar]
- LiDAT the Complete Comprehensive Data Collection and Tracking System from Liebherr; Liebherr Product Brochure; Liebherr: Kirchdorf, Germany, 2016.
- Bolz, G. Konzepte zur Erhöhung der Energieeffizienz von Mobilbaggern. In Proceedings of the 5th Fachtagung Baumaschinentechnik, Dresden, Germany, 20–21 September 2012. [Google Scholar]
- Fecke, M. Standardisierung definierter Lastzyklen und Messmethoden zur Energieverbrauchsermittlung von Baumaschinen. In Proceedings of the 5th Fachtgaung Baumaschinentechnik, Dresden, Germany, 17–19 September 2015. [Google Scholar]
- Steindorff, K. Energierückgewinnung am Beispiel eines ventilgesteuerten hydraulischen Antriebs. Ph.D. Thesis, TU Braunschweig, Braunschweig, Germany, 2010. [Google Scholar]
- Sgro, S.; Murrenhoff, H. Energierückgewinnungssysteme für Baggerausleger—Eine Systematische Übersicht der Vorhandenen Lösungsmöglichkeiten; O+P 10/2010; Vereinigte Fachverlage: Mainz, Germany, 2010. [Google Scholar]
- Amrhein, J.; Neumann, U. PRB—Regeneration of potential energy while boom-down. In Proceedings of the 8th International Conference on Fluid Power, Dresden, Germany, 26–28 March 2012. [Google Scholar]
- Thompson, B.; Yoon, H.; Kim, J.; Lee, J. Swing Energy Recuperation Scheme for Hydraulic Excavators; SAE Technical Paper 2014-01-2402; SAE: Warrendale, PA, USA, 2014. [Google Scholar] [CrossRef]
- Hießl, A.; Scheidl, R. Energy consumption and efficiency measurements of different excavators—Does hybridization pay? In Proceedings of the ASME/BATH Symposium on Fluid Power and Motion Control, Chicago, IL, USA, 12–14 October 2015. [Google Scholar]
- Joo, C.; Stangl, M. Application of power regenerative boom system to excavator. In Proceedings of the 10th International Conference on Fluid Power, Dresden, Germany, 8–10 March 2016. [Google Scholar]
- Vukovic, M.; Sgro, S.; Murrenhoff, H. STEAM—A holistic approach to designing excavator systems. In Proceedings of the 9th International Fluid Power Conference, Aachen, Germany, 24–26 March 2014. [Google Scholar]
- Korane, K. How Hydraulic Fluids Affect Energy Efficiency, Mobile Hydraulic Tips. Available online: http://www.mobilehydraulictips.com/how-hydraulic-fluids-affect-energy-efficiency/ (accessed on 7 October 2016).
- Michael, P.W.; Mettakadapa, S. Bulk Modulus and Traction Effects in an Axial Piston Pump and a Radial Piston Motor. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016. [Google Scholar]
- Forche, J. Antriebsstrangmanagement eines Hydraulikbaggers. Ph.D. Thesis, Technical University Braunschweig, Braunschweig, Germany, 2007. [Google Scholar]
- Ng, F.; Harding, J.A.; Glass, J. An eco-approach to optimise efficiency and productivity of a hydraulic excavator. J. Clean. Prod. 2016, 112, 3966–3976. [Google Scholar] [CrossRef]
- Inderelst, M. Efficiency Improvements in Mobile Hydraulic Systems, Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2013. [Google Scholar]
- Leifeld, R.; Vukovic, M.; Murrenhoff, H. Hydraulic hybrid architecture for excavators. ATZoffhighway Worldw. 2016, 9, 44–49. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cycle | |||
|---|---|---|---|
| Dig & Dump | 0.20 | 0.60 | 0.51 |
| Trenching | 0.18 | 0.50 | 0.50 |
| Grading | 0.08 | 0.45 | 0.44 |
| Swing 90° | Swing 180° | Boom D&D | Arm D&D | Swing 90° D&D | Swing 180° D&D |
|---|---|---|---|---|---|
| 0.25 x | 0.5 x | x | 0.1 x | 0.5 x | x |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vukovic, M.; Leifeld, R.; Murrenhoff, H. Reducing Fuel Consumption in Hydraulic Excavators—A Comprehensive Analysis. Energies 2017, 10, 687. https://doi.org/10.3390/en10050687
Vukovic M, Leifeld R, Murrenhoff H. Reducing Fuel Consumption in Hydraulic Excavators—A Comprehensive Analysis. Energies. 2017; 10(5):687. https://doi.org/10.3390/en10050687
Chicago/Turabian StyleVukovic, Milos, Roland Leifeld, and Hubertus Murrenhoff. 2017. "Reducing Fuel Consumption in Hydraulic Excavators—A Comprehensive Analysis" Energies 10, no. 5: 687. https://doi.org/10.3390/en10050687
APA StyleVukovic, M., Leifeld, R., & Murrenhoff, H. (2017). Reducing Fuel Consumption in Hydraulic Excavators—A Comprehensive Analysis. Energies, 10(5), 687. https://doi.org/10.3390/en10050687