
Design of a H∞ Robust Controller with μ-Analysis for Steam Turbine Power Generation Applications



Abstract
:1. Introduction
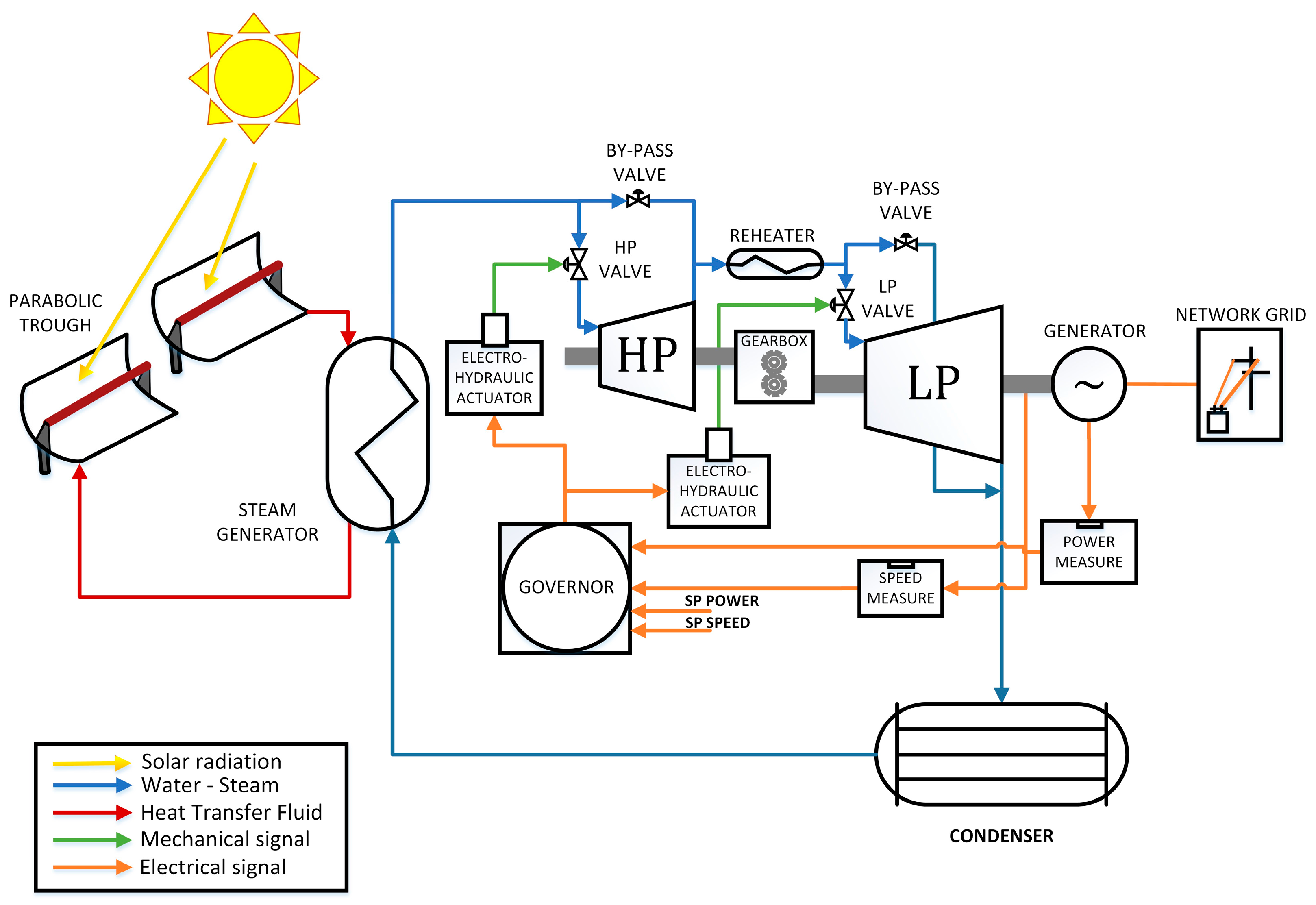
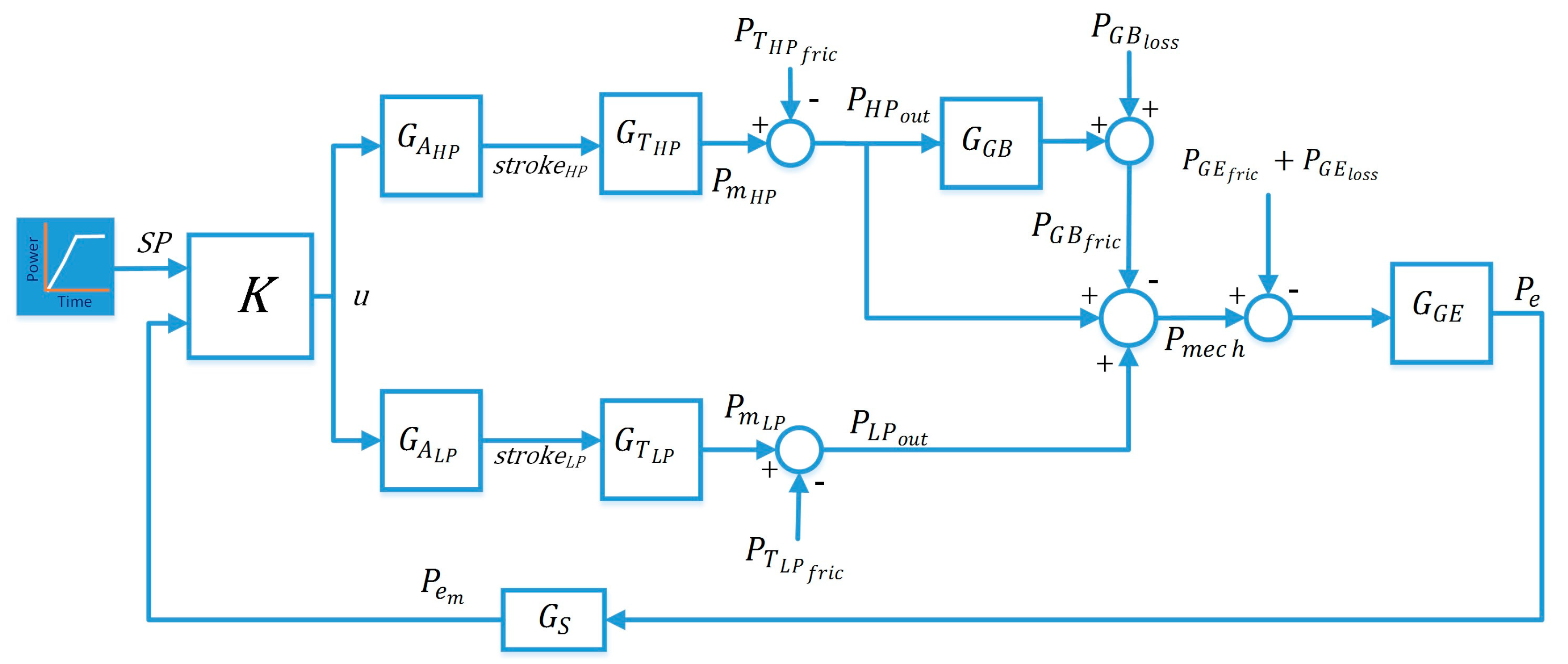
2. Steam Turbine Power Plant Control System
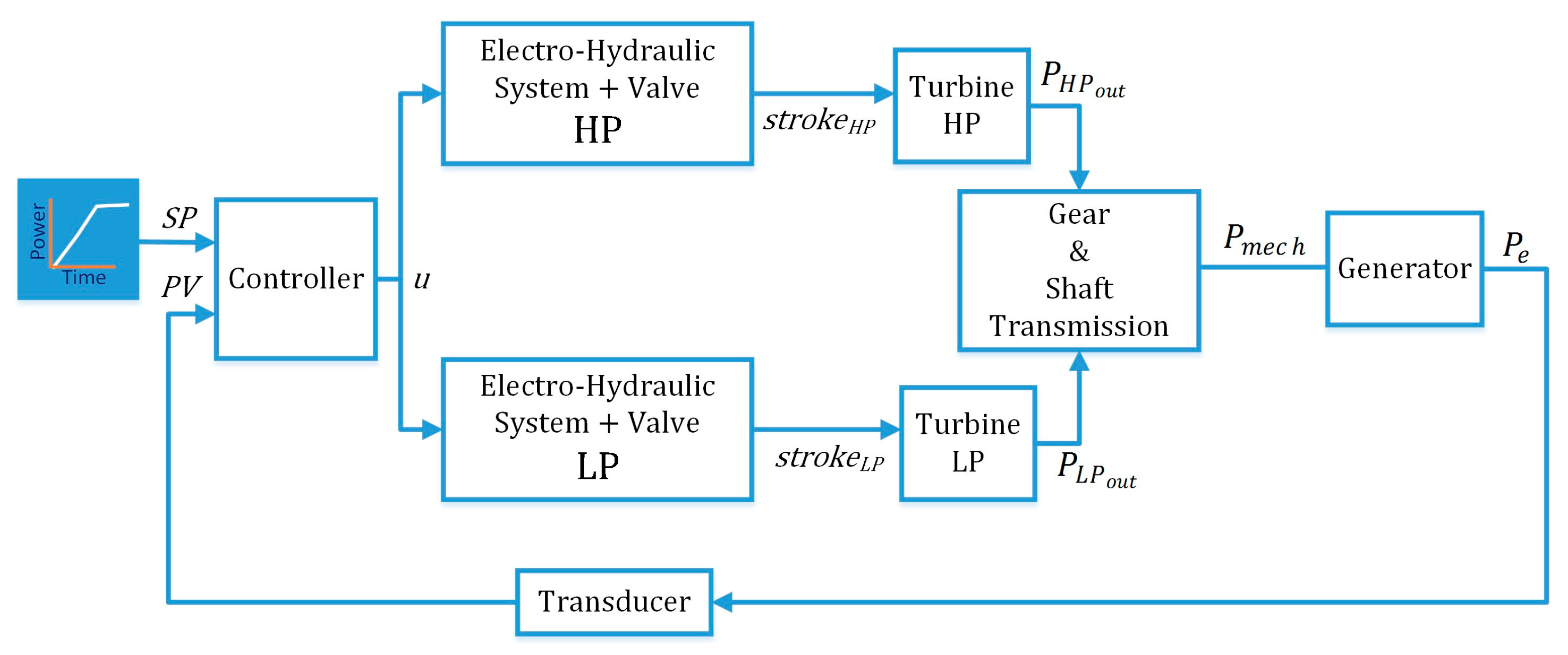
2.1. System Model
- An anti-windup obtained by differential formulation of the integral component.
- limiter in the output.
- proportional gain involved as well in the integral component calculation.
3. H∞ Controller for Steam Turbine Power Control
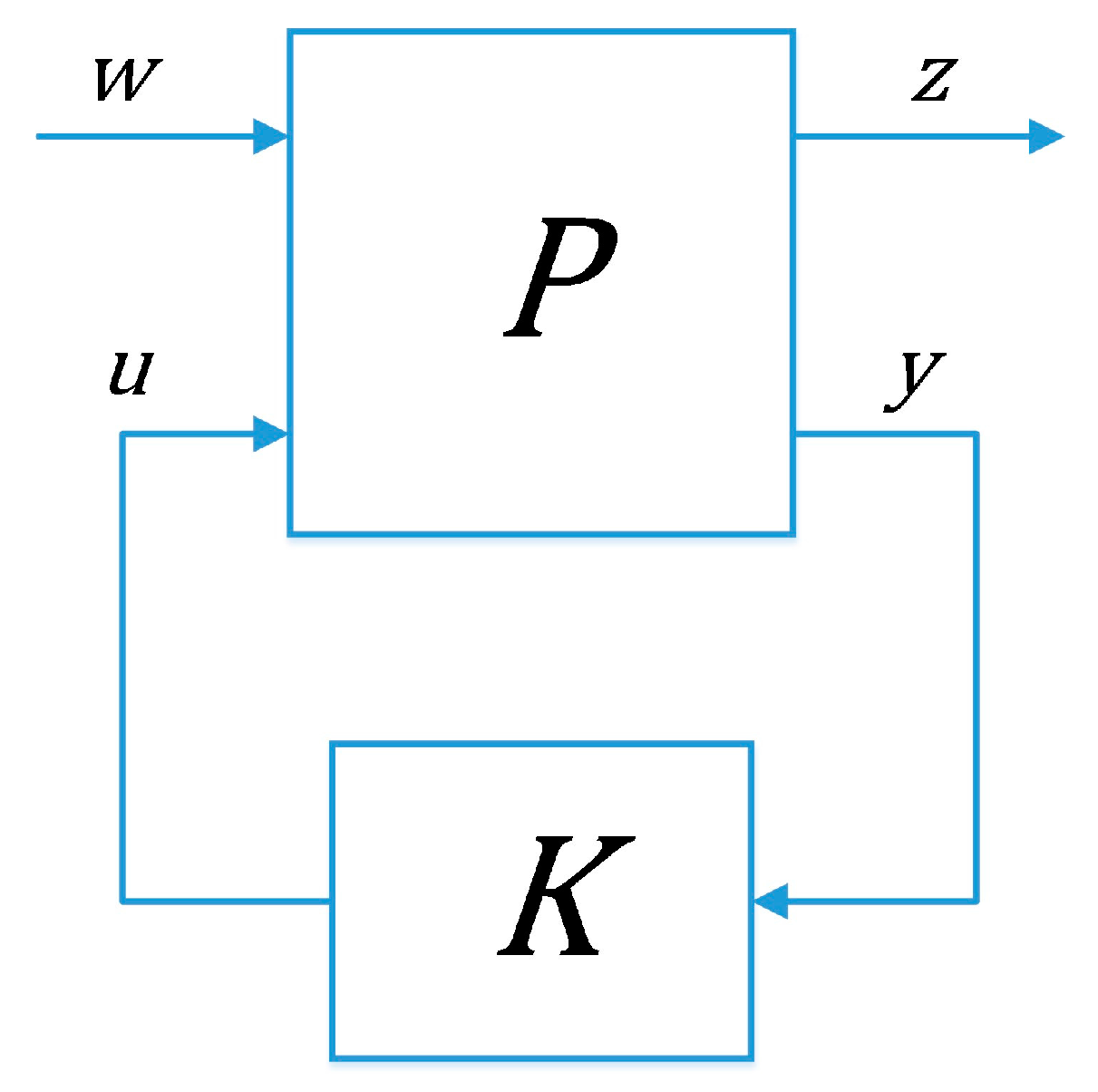
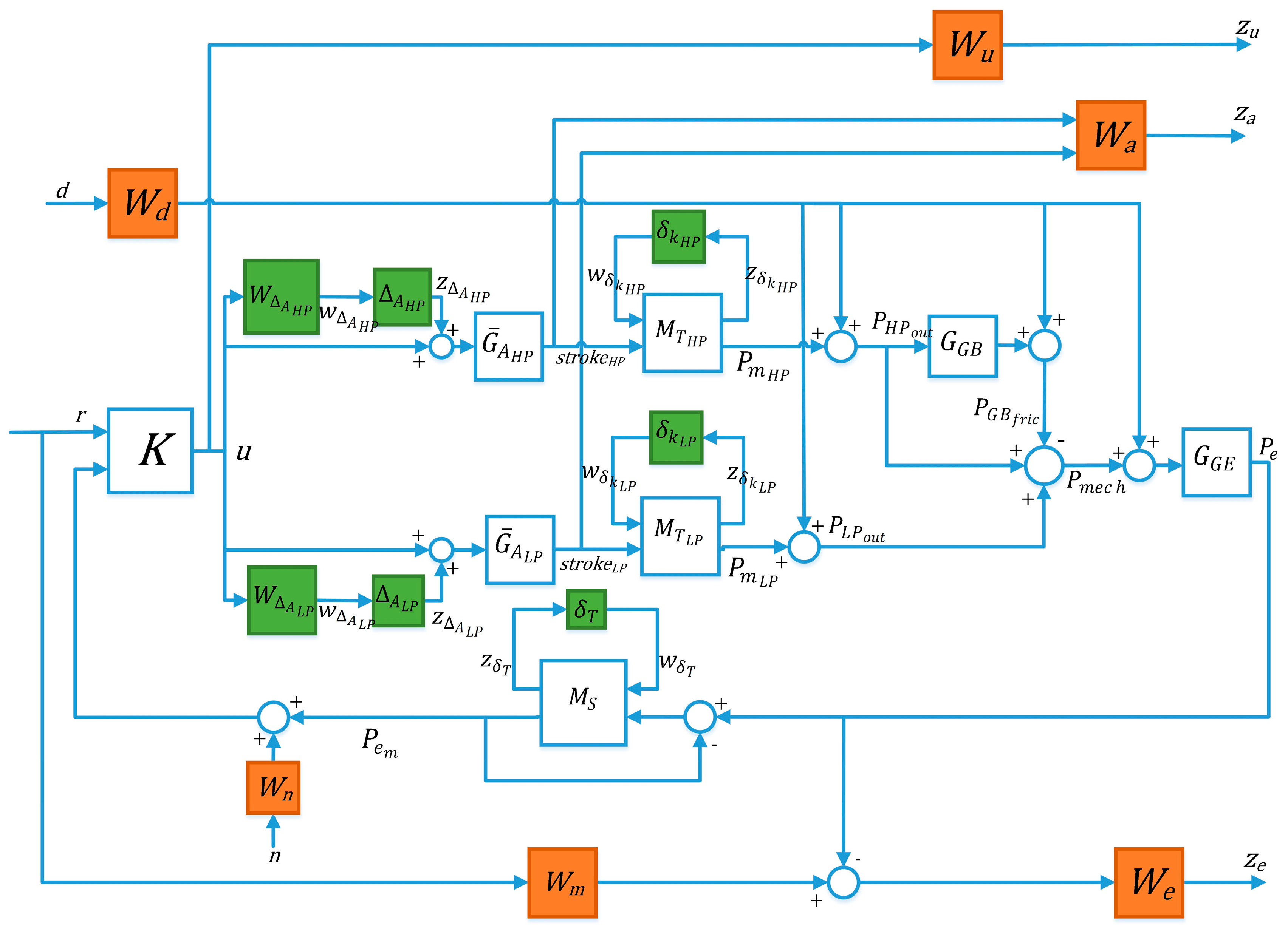
3.1. Problem Statement
- the generalized disturbance , which cannot be affected by the controller and includes references, disturbances and noise signals;
- the output signal of the controller called control input;
- the input signal of the controller called measurement output;
- the controlled variable , which denotes the performance requirements.
- Riccati equations approach.
- Linear Matrix Inequalities (LMI) approach.
3.2. Optimization
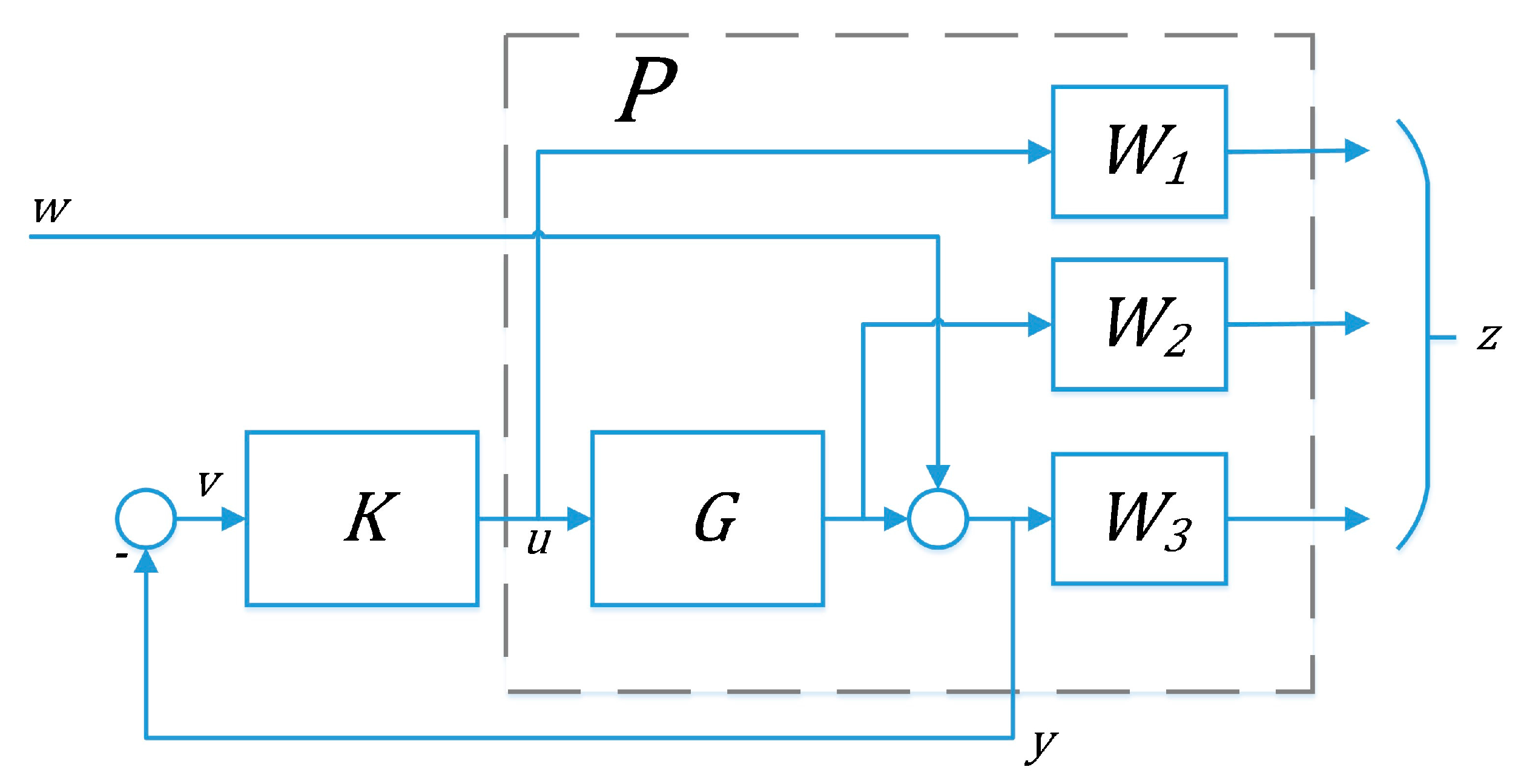
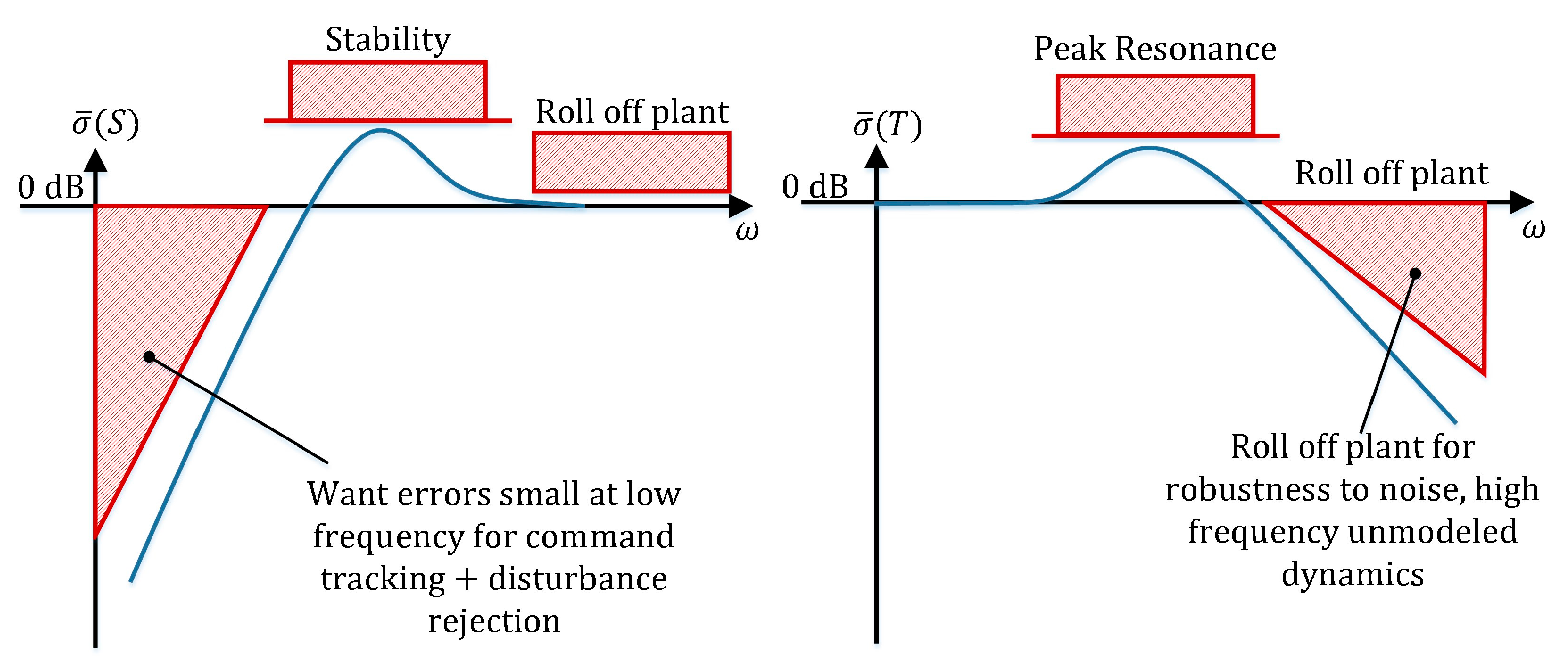
- needs to be minimize over the low-frequency range to get small tracking error and good disturbance rejection. This specification may be captured simply by an upper bound of , where has low-pass filter characteristics with bandwidth equal to the bandwidth of the disturbance.
- needs to be minimized at high frequencies to account for noise and unmodeled dynamics that appear in that frequency range. To achieve this goal, one might specify an upper bound of , where has high-pass filter characteristics.
- should be kept at low values to limit the control signal in order to prevent saturation of the actuators. This specification may be captured simply by an upper bound of , where has high-pass filter characteristics or is constant.
- forms the frequency content and magnitude of the exogenous disturbance affecting the plant.
- shapes the magnitude and the frequency of the reference command.
- represents the frequency-domain models of sensor noise.
- represents the desired model for the closed-loop system with tracking.
- shapes the tracking error.
- forms the frequency content and magnitude of the control signal use.
- represents the model of the sensor dynamics. This model might also be lumped into the plant model .
3.3. Linear Model Description
- Offsets as well as saturations were eliminated.
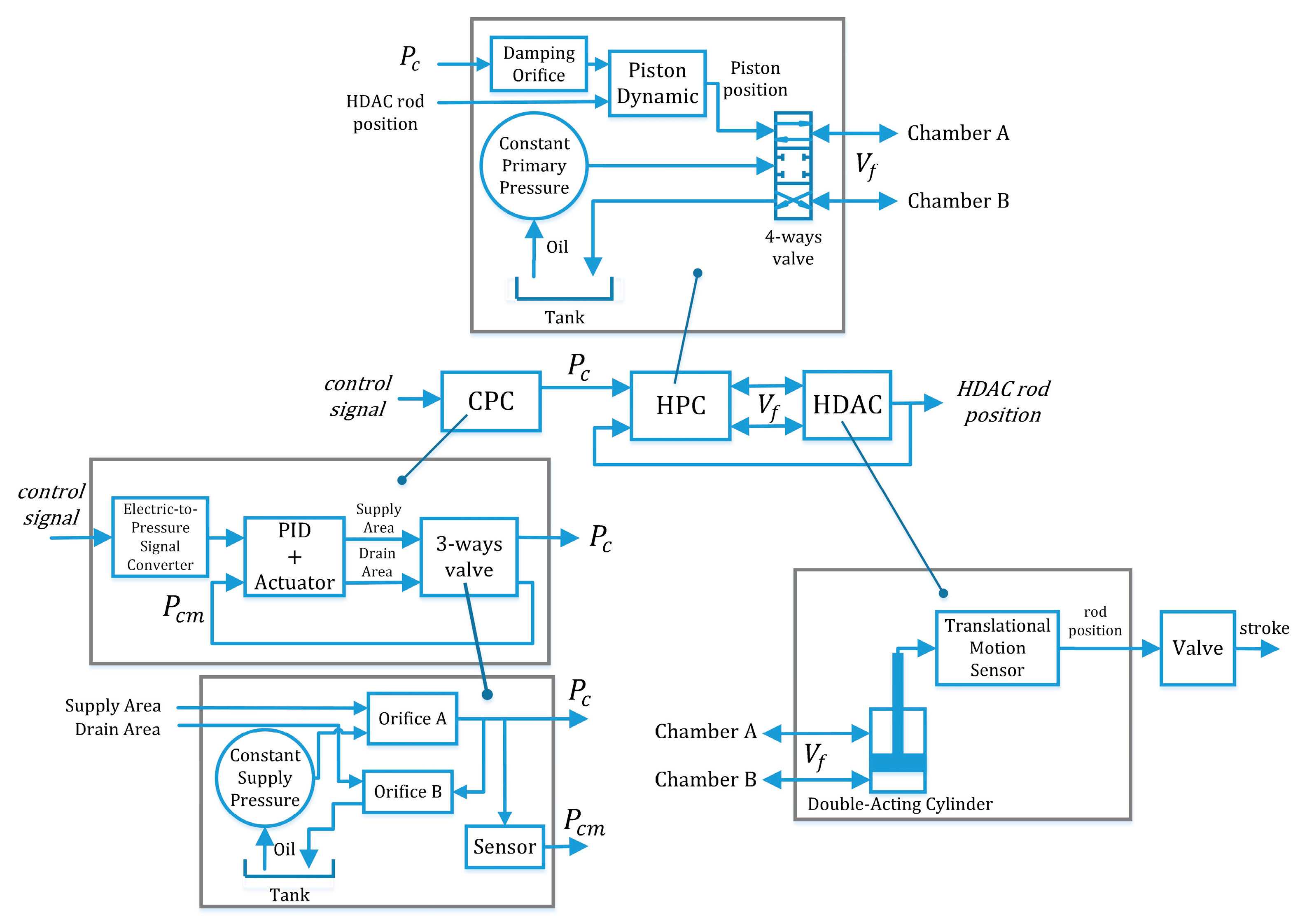
- A linear model of the electro-hydraulic system with the valve of both HP and LP turbine was identified and introduced as transfer function. Since the dynamic of the system must take into account several dynamic components and the delay due to the oil flow, the system was identified with a fourth-order, stable and not minimum phase transfer function with the structure:
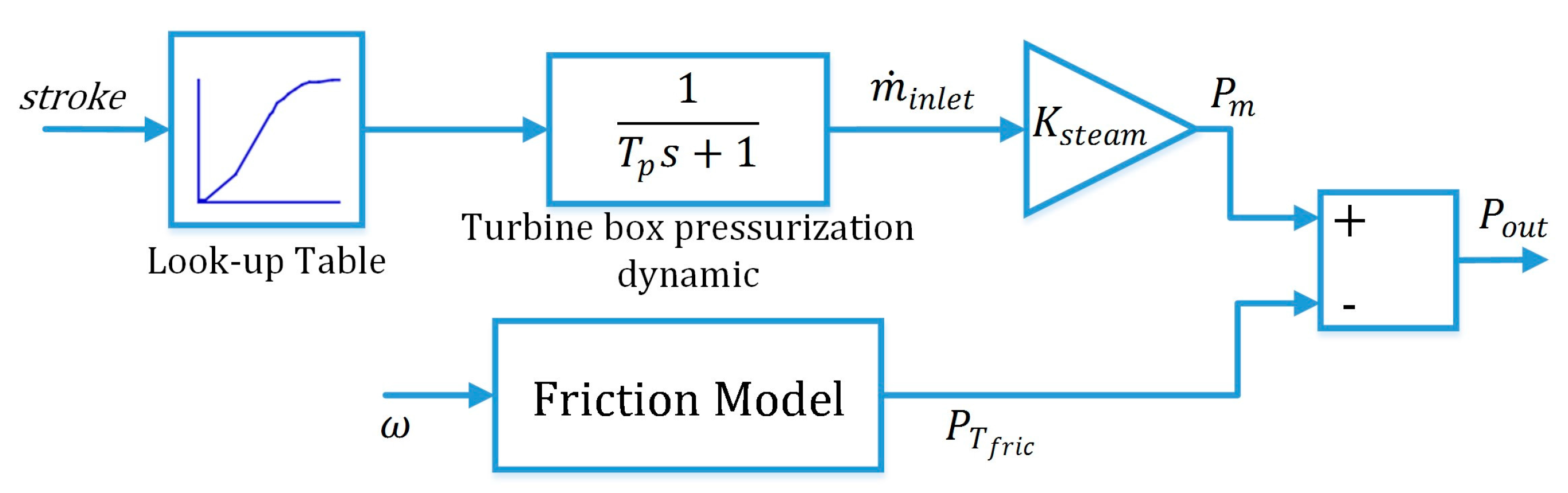
- The nonlinearities introduced by the look-up tables were replaced by constant gains defined as the ratio between the maximum inlet steam mass flow and the maximum stroke valve:
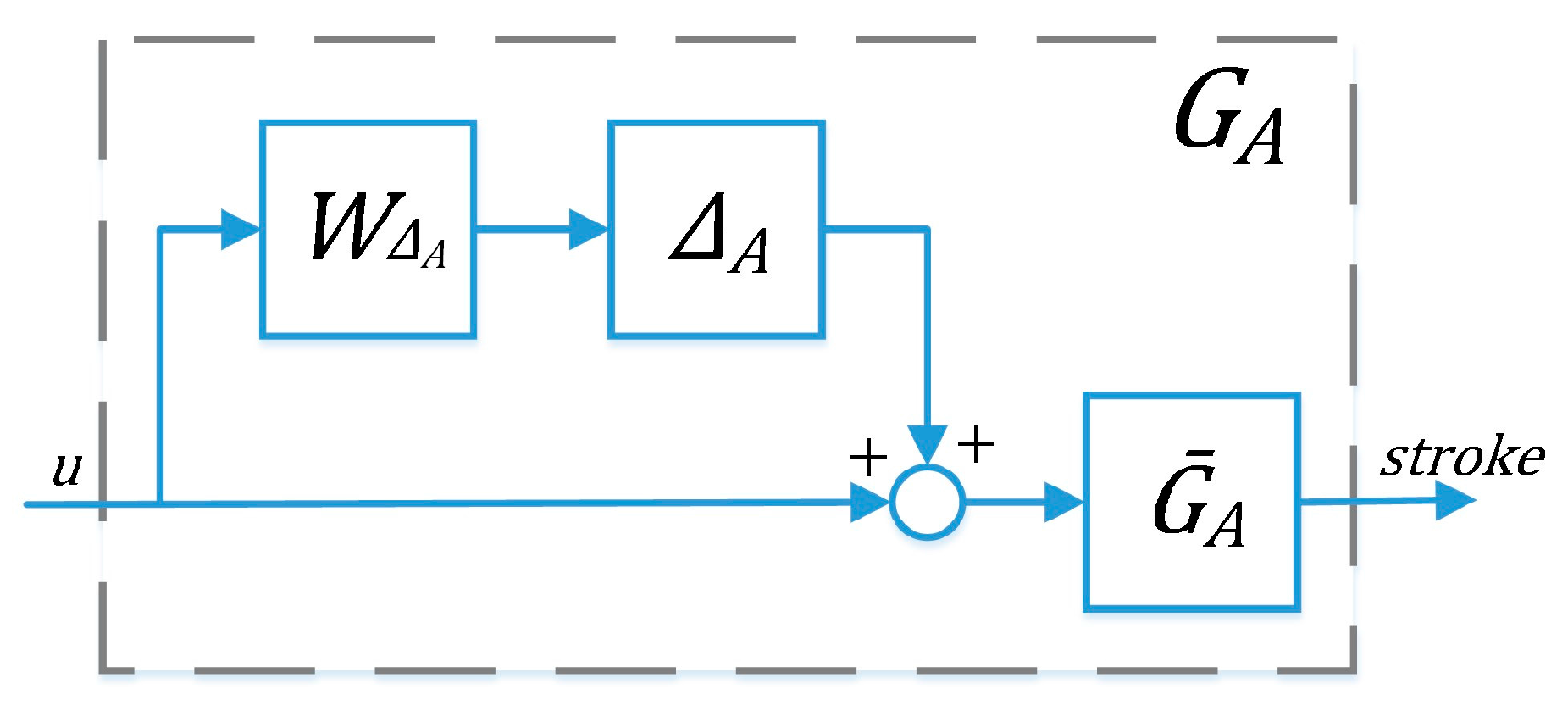
3.4. Derivation of Uncertainty Model
3.4.1. Actuator System Uncertainties
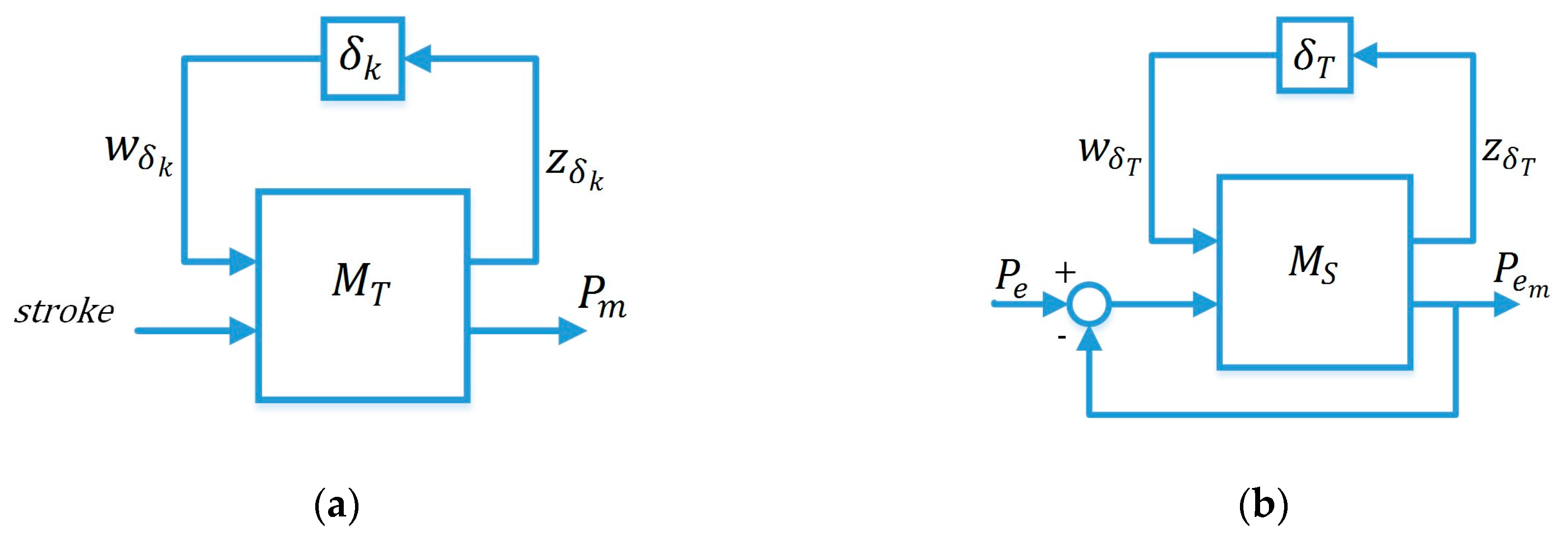
3.4.2. Turbine Parameter Uncertainties
3.4.3. Sensor Parameter Uncertainties
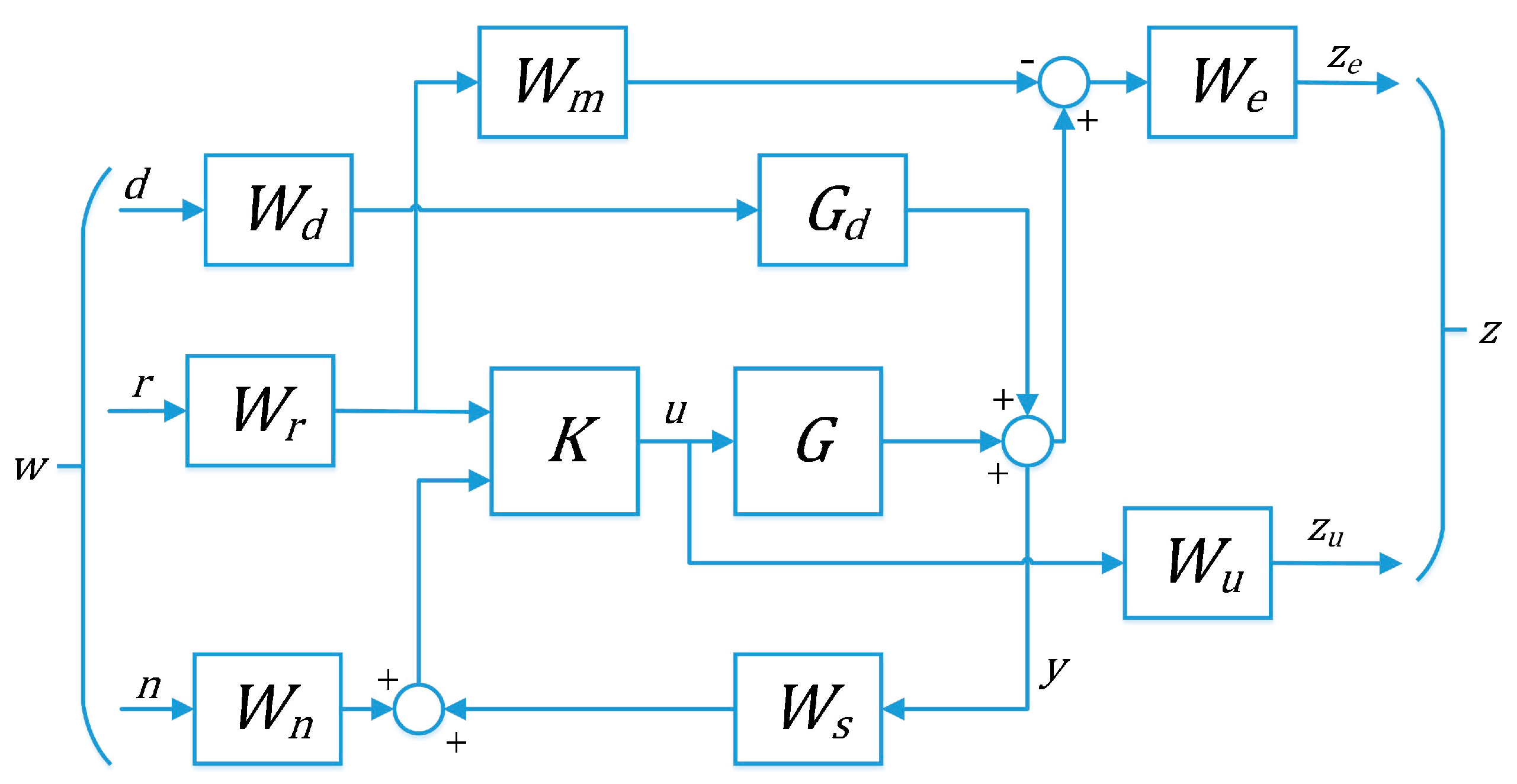
3.5. Performance Specifications
- forms the frequency content and magnitude of the exogenous disturbance affecting the plant.
- represents the frequency domain model of the sensor noise.
- is an ideal model of performance, to which the designed closed-loop system tries to match.
- represents the control action constraint.
- introduces the constraints on the maximum stroke of both HP and LP valve.
- shapes the error between the response of the close-loop system and the ideal model .
3.5.1. Disturbance Weight Function
3.5.2. Noise and Control Action Weight Functions
3.5.3. Stroke Valve Weight Function
3.5.4. Closed-Loop Ideal Model Weight Function
- Settling time <141 s
- Rise time <131 s
- Overshoot <2%
- IAE < 4104
3.5.5. Tracking Error Weight Function
3.6. Control Synthesis
- Nominal Performance:where is the unperturbed open-loop system and ‖∙‖∞ is the -norm.
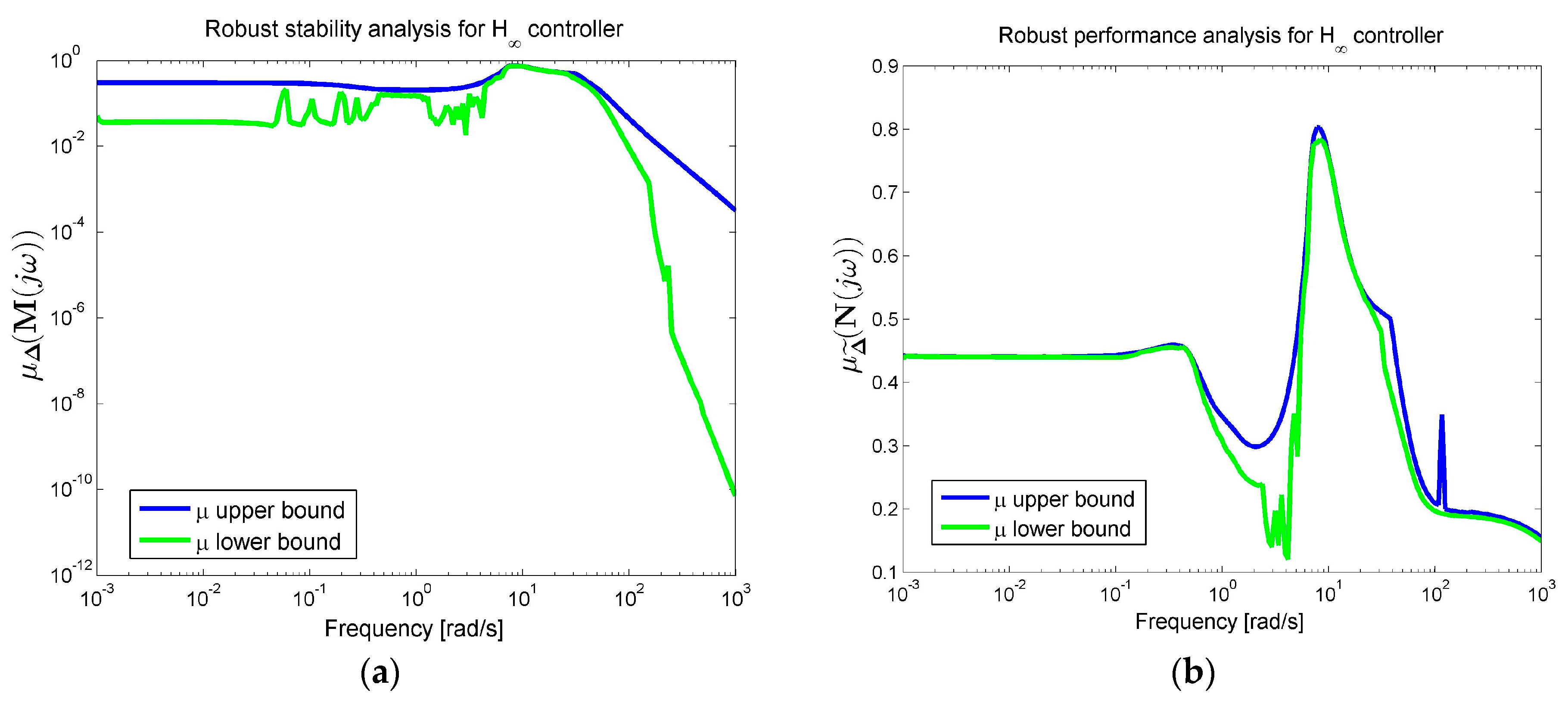
- Robust Stability:for structured uncertainty where is the structured singular value, corresponding to the transfer matrix from to , the so called matrix .
- Robust Performance:for the structured uncertainty where is the structured singular value, corresponding to the transfer matrix from to , the so called matrix , with regard to where is a fictitious 34 complex uncertainty block.
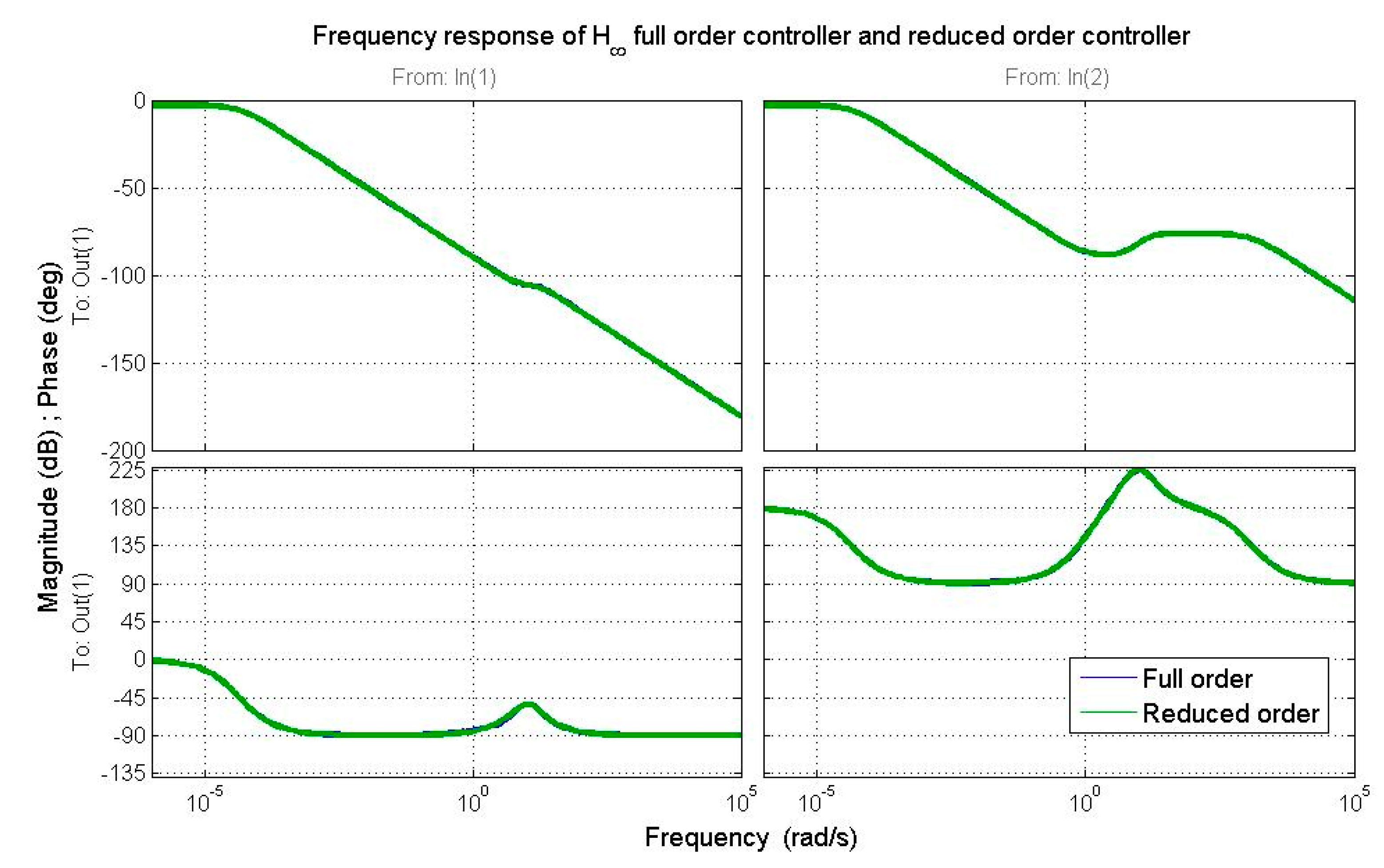
- Low-Order Controller:where is the full order controller and is the reduced order controller.
3.6.1. Nominal Performance Analysis
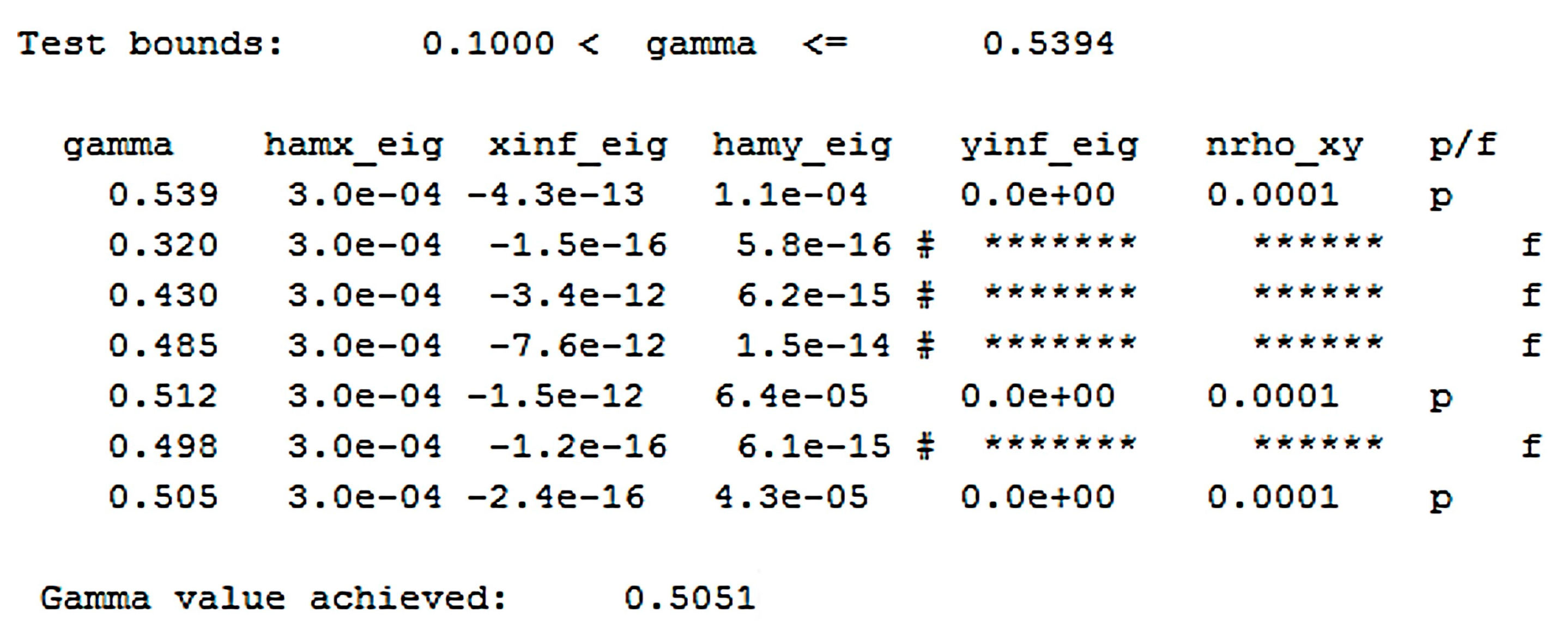
3.6.2. Robustness Analysis
3.6.3. Controller-Order Reduction
4. Simulation Results
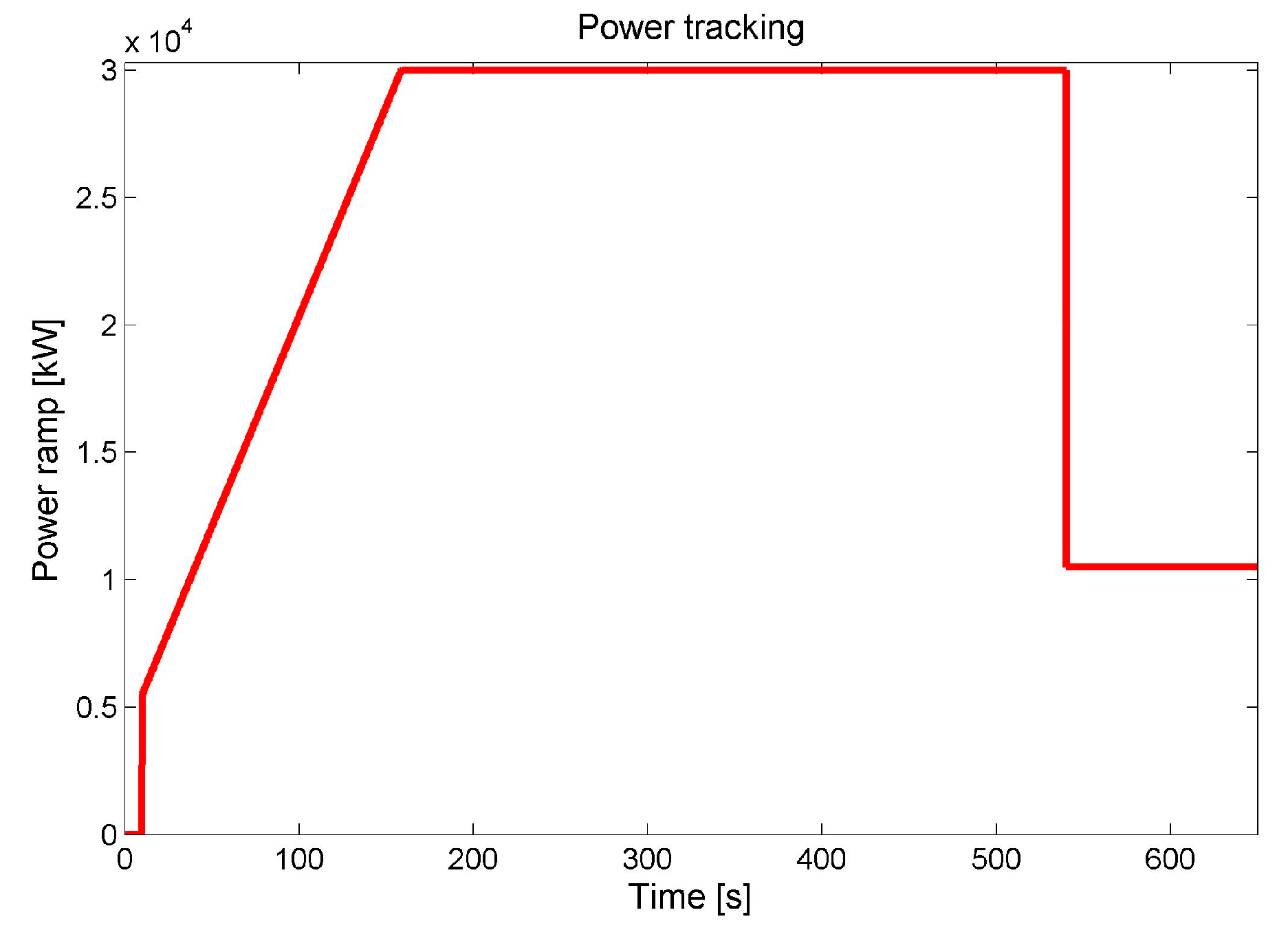
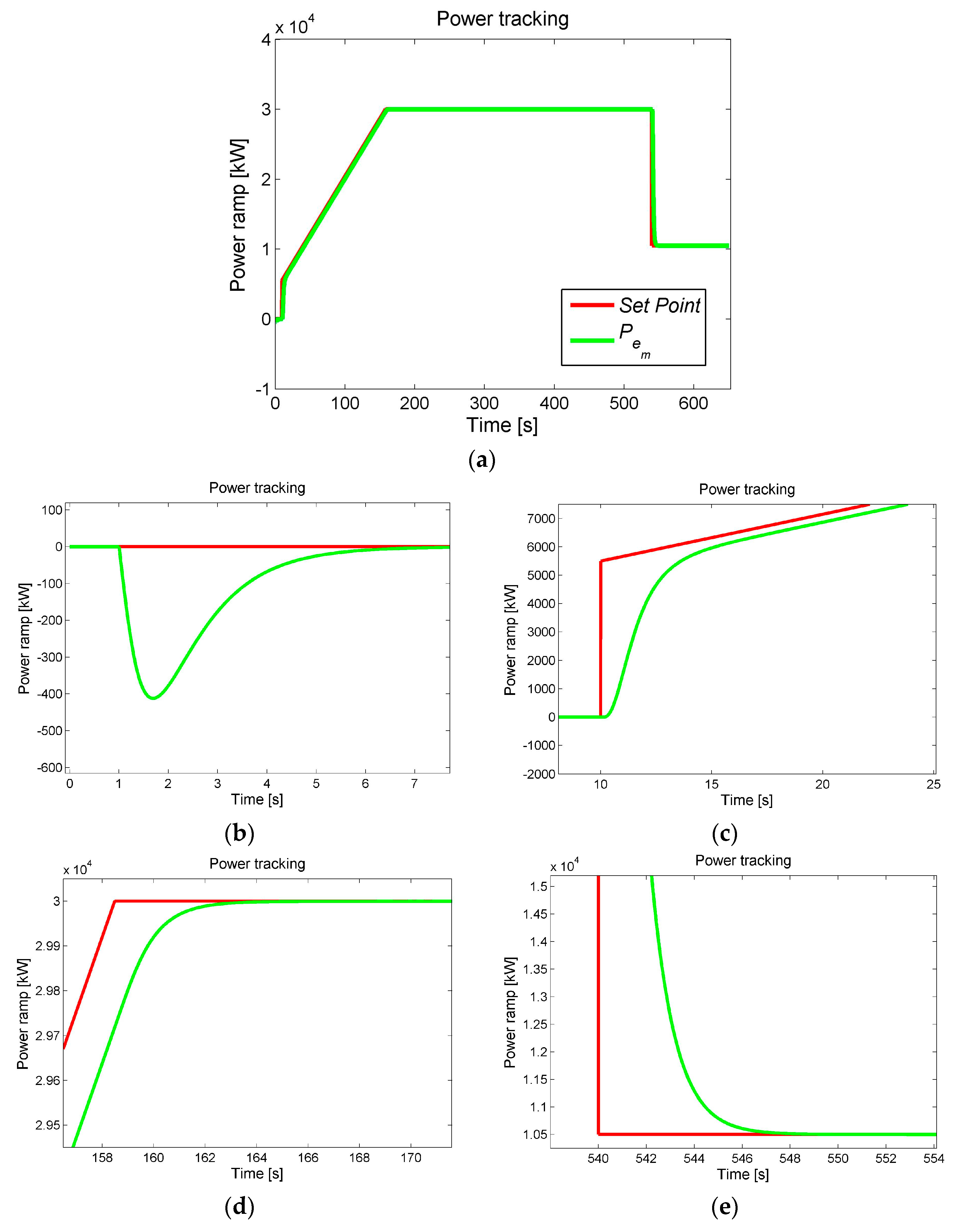
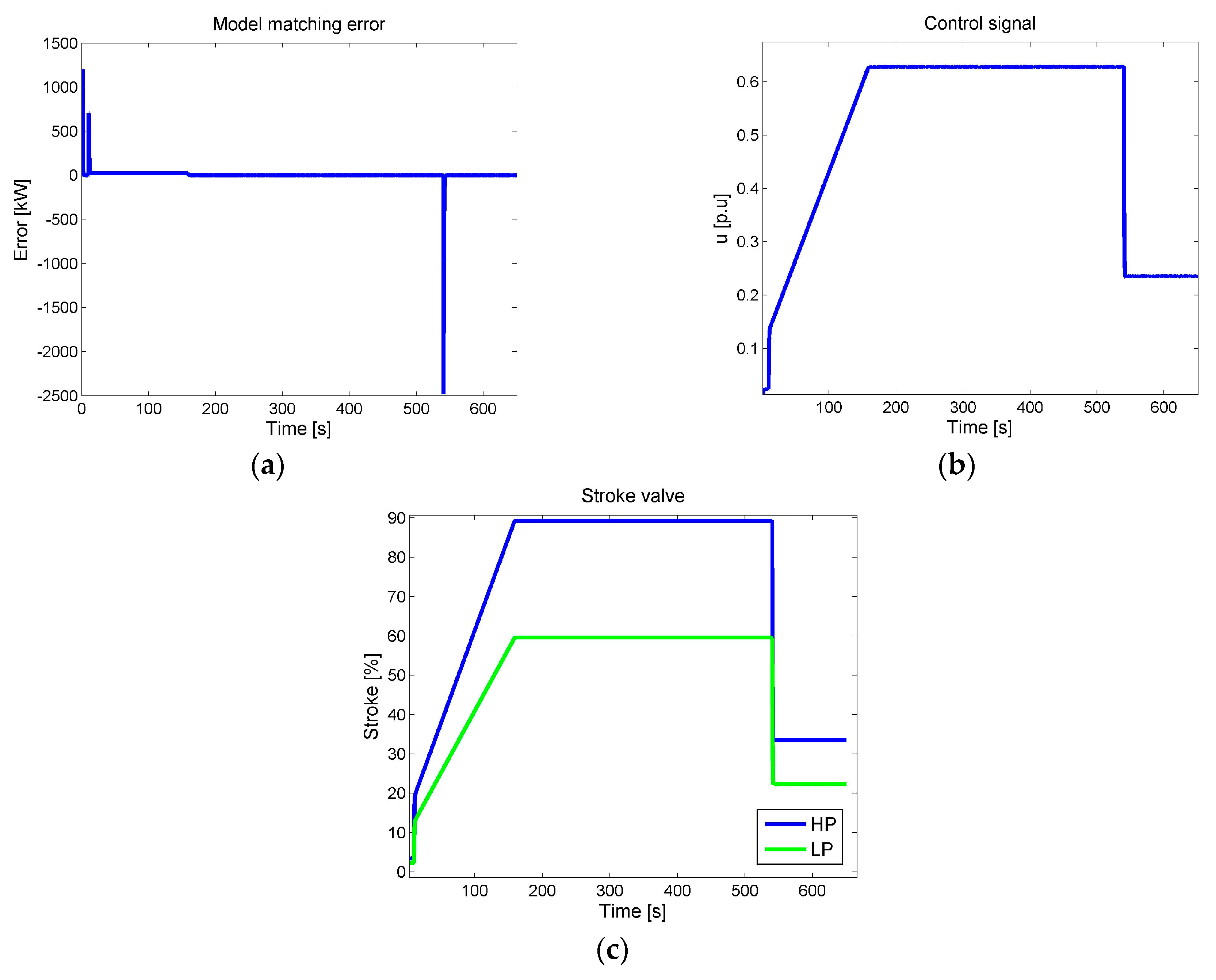
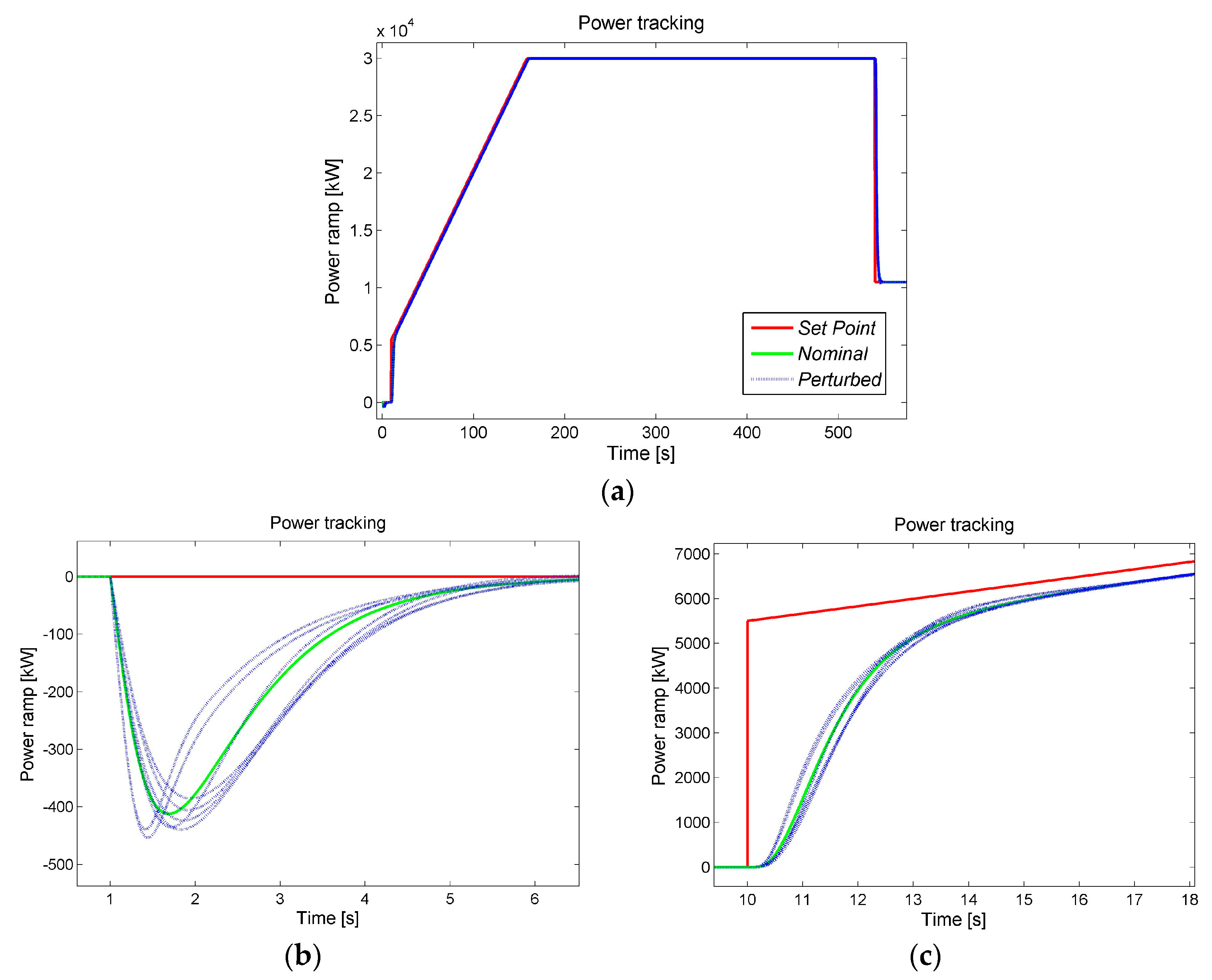
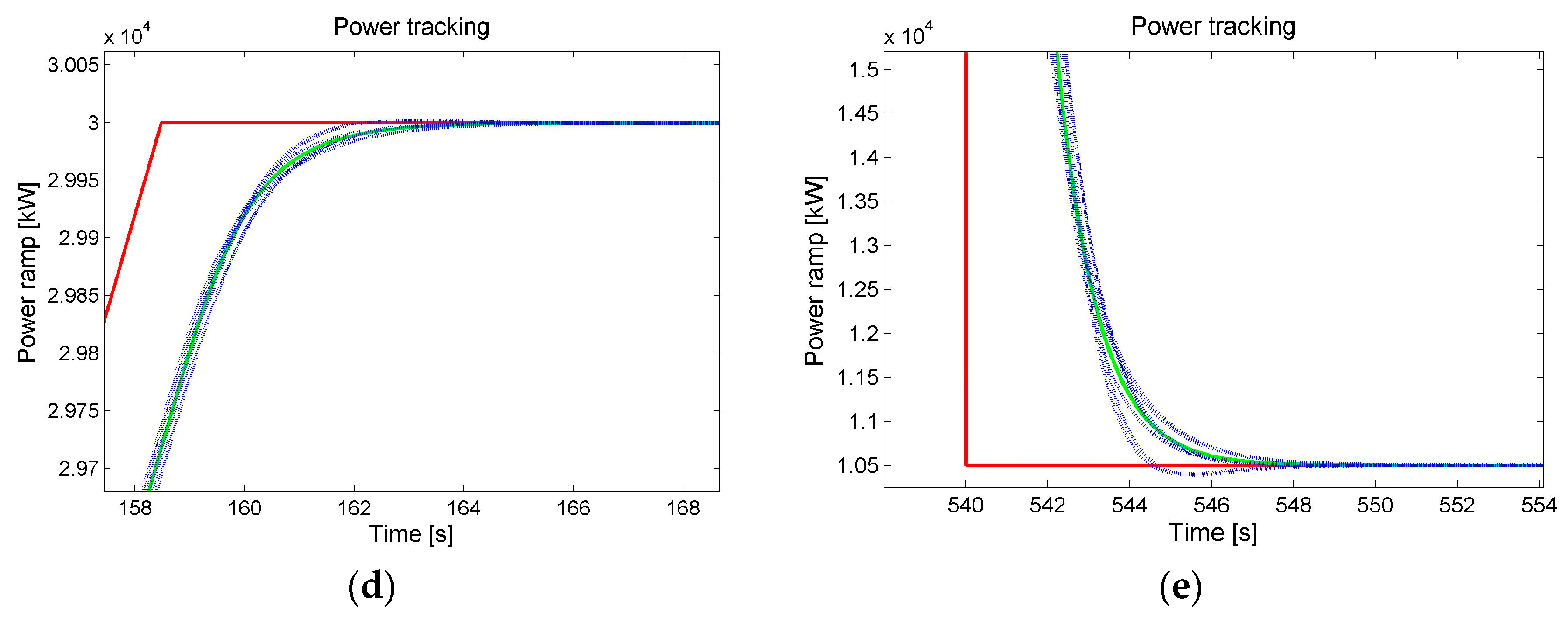
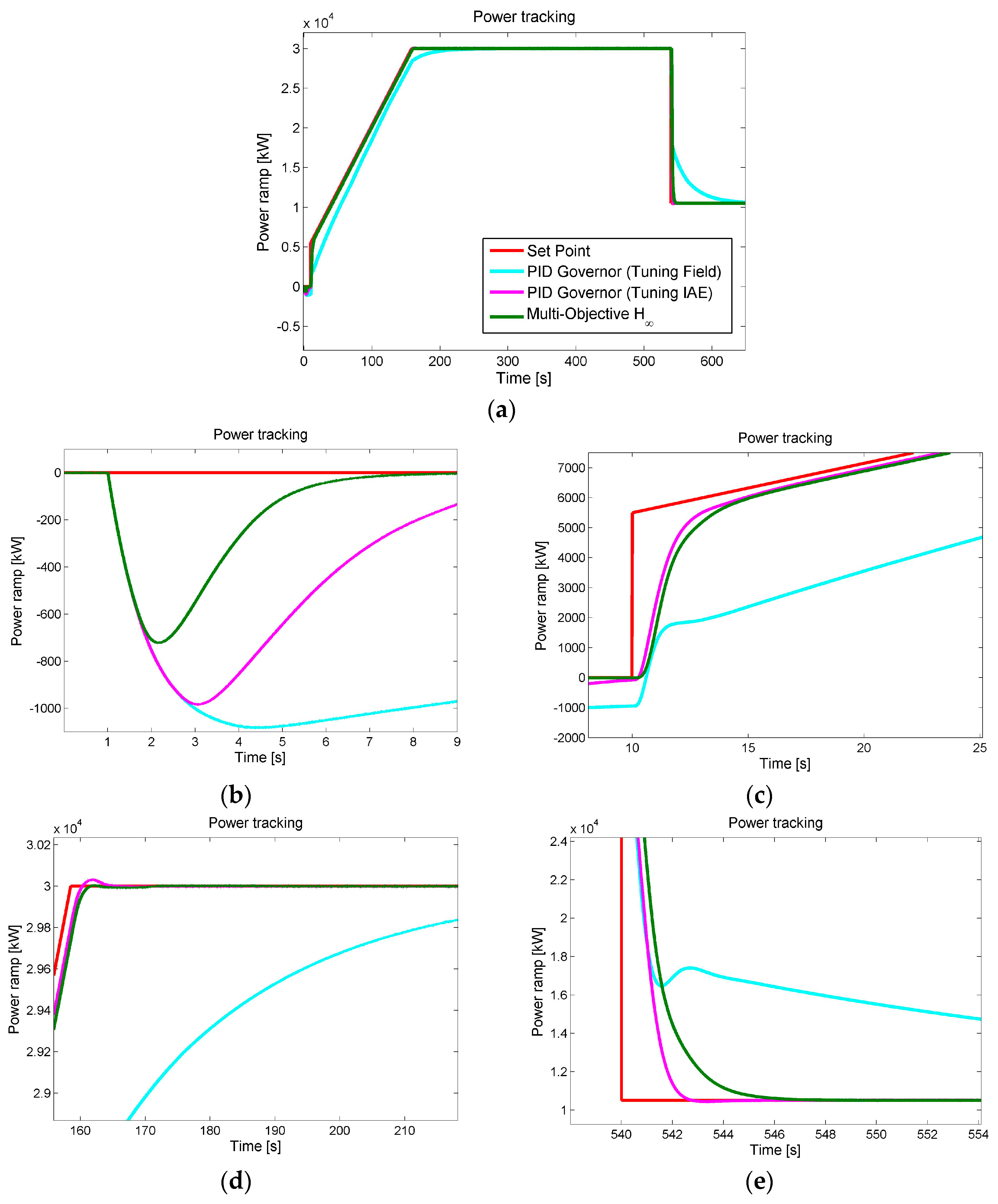
- Nominal conditions with the typical power ramp reference.
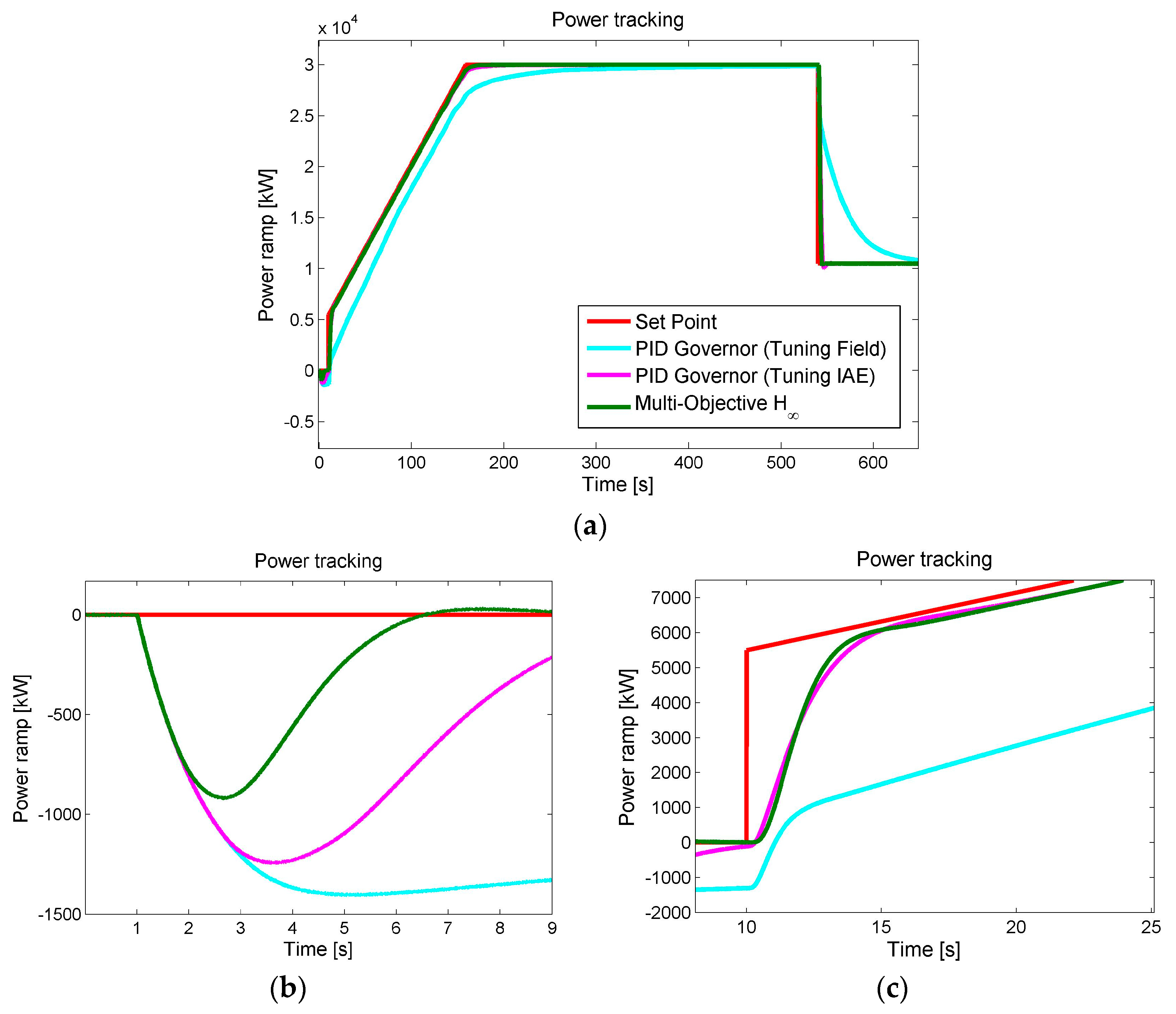
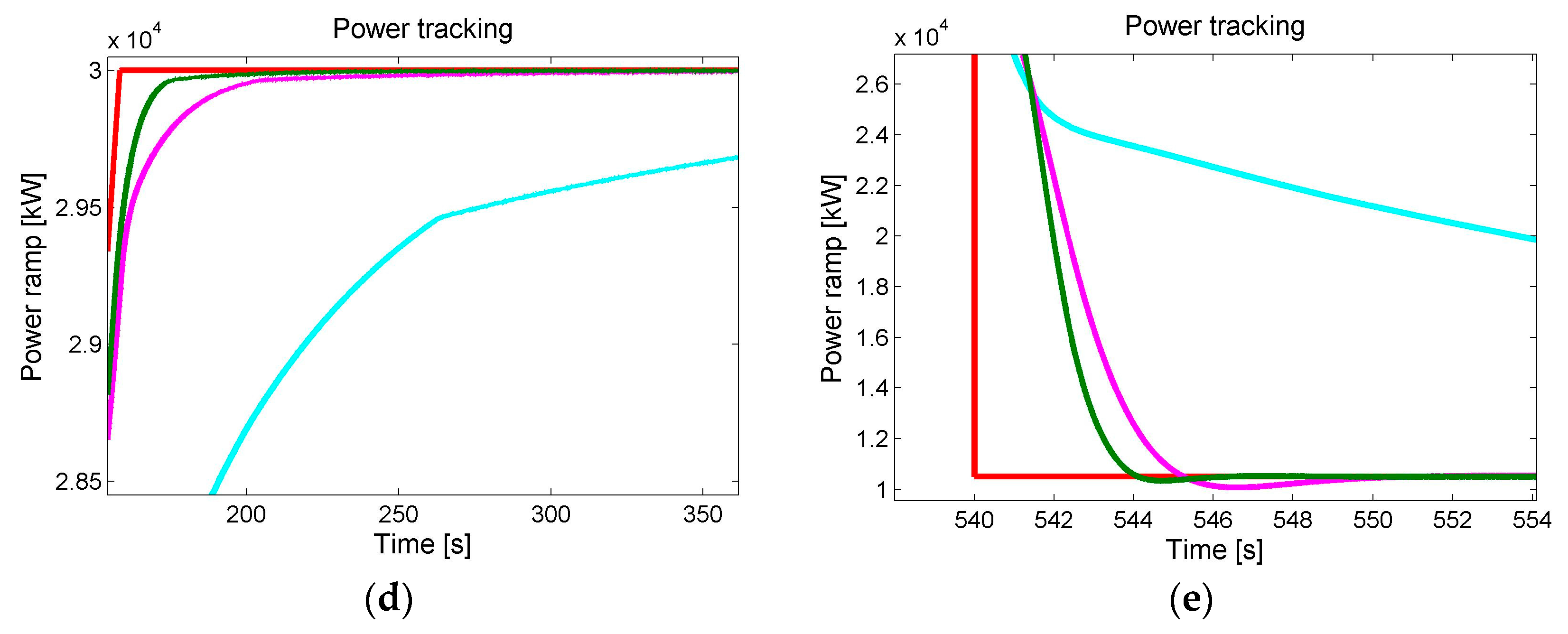
- Perturbed conditions with a variation in steam conditions causing a 30% power reduction of turbines, a sensor dynamic slower of about 50% and added power losses of about 50% with respect to the nominal case, when the typical power ramp is demanded to the system.
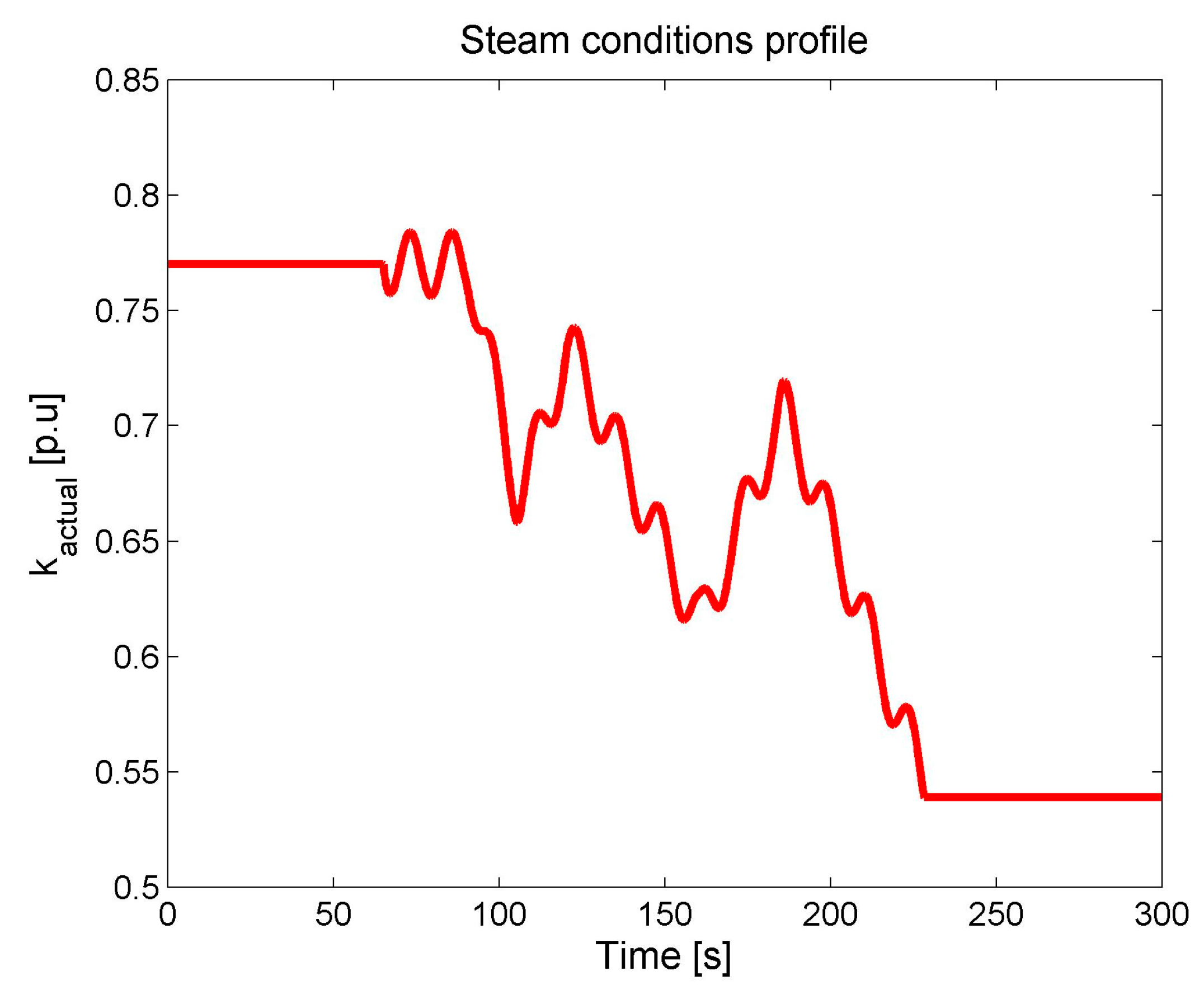
- Perturbed conditions with an unexpected variation of the actual conditions of the steam (as depicted in Figure 20), which causes a gradual power reduction of turbines of about 30% during the tracking of power reference.
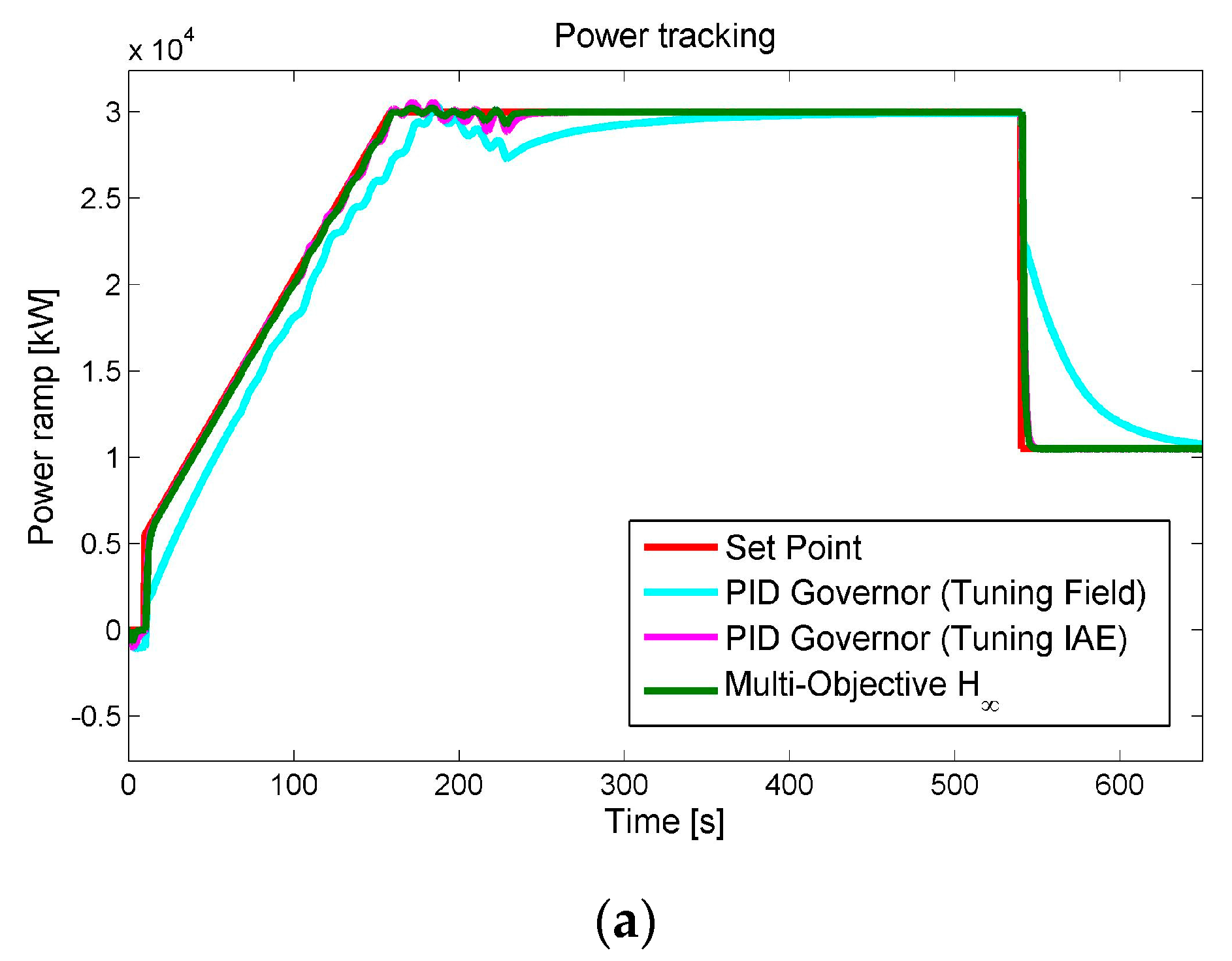
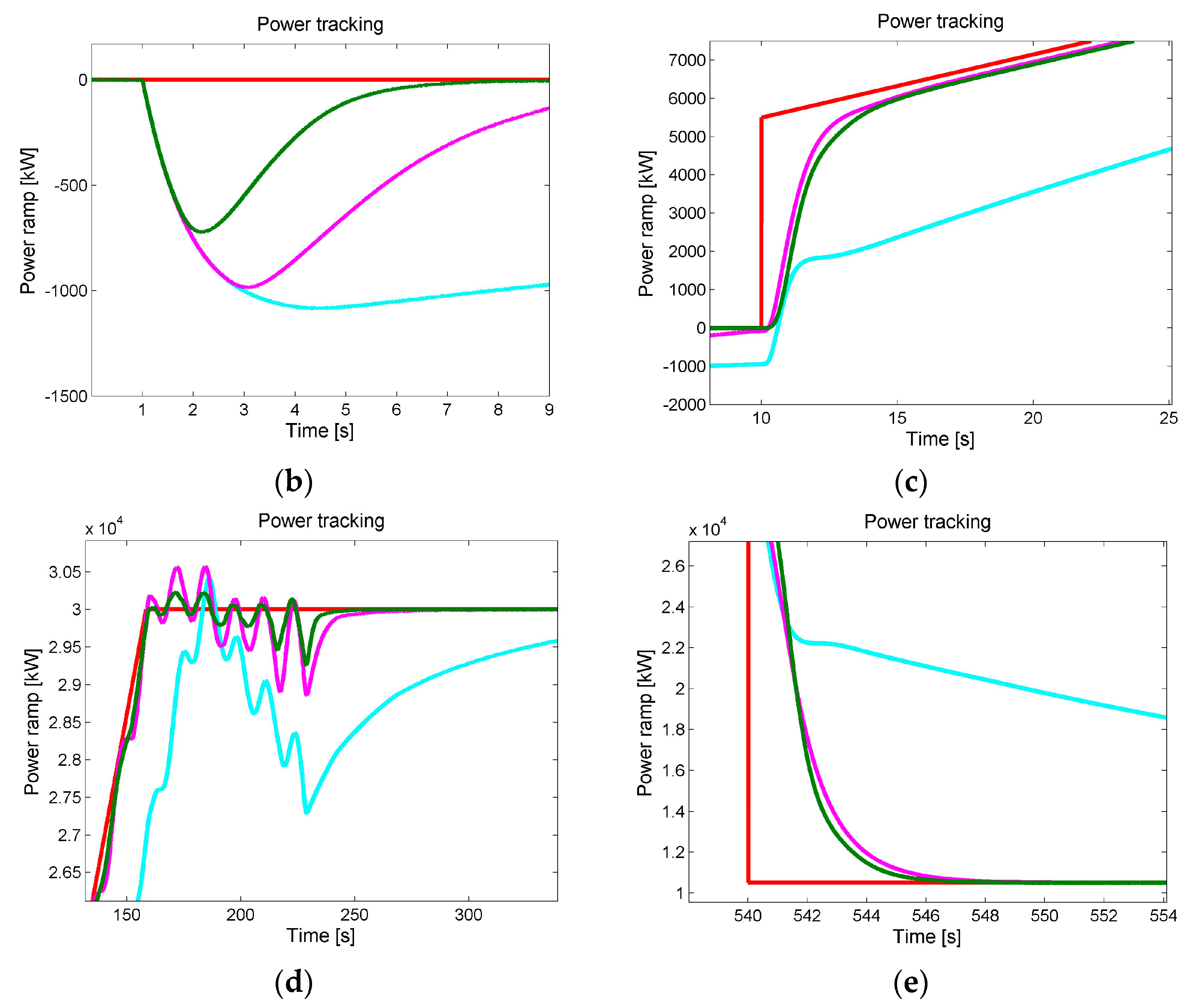
4.1. Nominal Conditions with Typical Loading Ramp
4.2. Perturbed Conditions with Typical Loading Ramp
4.3. Perturbed Conditions with an Unexpected Variation of the Steam
5. Conclusions
Author Contributions
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence |
| ANFIS | Adaptive Neuro Fuzzy Inference System |
| CPC | Current to Pressure Converter |
| CRHPC | Constraint Receding Horizon Predictive Control |
| CSP | Concentrated Solar Power |
| GA | Genetic Algorithms |
| GPC | General Predictive Control |
| HDAC | Hydraulic Double Acting Cylinder |
| HP | High Pressure |
| HPC | Hydraulic Pilot Cylinder |
| IAE | Integral Absolute Error |
| IMC | Internal Model Control |
| LLFT | Lower Linear Fractional Transformation |
| LMI | Linear Matrix Inequalities |
| LP | Low Pressure |
| LQR | Linear Quadratic Regulator |
| MBC | Model Based Control |
| MIMO | Multiple Input Multiple Output |
| MISO | Multiple Input Single Output |
| MPC | Model Predictive Control |
| MRAC | Model Reference Adaptive Controller |
| PI | Proportional Integral |
| PID | Proportional Integral Derivative |
| PLC | Programmable Logic Controller |
| PSO | Particle Swarm Optimization |
| PV | Photovoltaics |
| RBFNN | Radial Basis Function Neural Networks |
| ULFT | Upper Linear Fractional Transformation |
Symbols
| Steam gain | |
| Rated power | |
| Inlet steam mass flow | |
| Maximum steam mass flow | |
| Actual steam conditions | |
| Rotational speed | |
| Synchronism rotational speed | |
| Turbine mechanical drive power | |
| Turbine useful power output | |
| Turbine friction power losses | |
| Bearing power losses | |
| HP turbine torque | |
| LP turbine torque | |
| Gearbox friction torque | |
| Electric generator torque | |
| Windage and bearing friction torque | |
| Full load torque power losses | |
| Total moment of inertia | |
| HP turbine moment of inertia | |
| LP turbine moment of inertia | |
| Gearbox moment of inertia | |
| Generator moment of inertia | |
| Full load power losses | |
| Windage and bearing rated power losses | |
| Electric power | |
| Gearbox power losses | |
| Electric generator power losses | |
| Complex Laplace variable | |
| Extended plant transfer matrix | |
| Nominal plant transfer matrix | |
| Controller transfer matrix | |
| Transfer matrix from to | |
| Generalized disturbance | |
| Controlled variable | |
| Measurement output | |
| Control input | |
| LLFT | |
| ULFT | |
| -norm | |
| Largest singular value of | |
| cost function | |
| Sensitivity | |
| Complementary sensitivity | |
| Control effort | |
| Weigh function | |
| Actuator transfer function | |
| Look-up table gain | |
| Unknown uncertainty | |
| Real uncertainty parameter | |
| Magnitude of | |
| Absolute value of | |
| Turbine transfer matrix | |
| Sensor transfer matrix | |
| Sensor time constant | |
| Reference input | |
| Disturbance input | |
| Noise input | |
| Uncertainty output | |
| Uncertainty input | |
| Tracking error | |
| Structured Singular Value | |
| Transfer matrix from to | |
| Transfer matrix from to |
References
- Webber, M. Catch-22: Water vs. Energy. Sci. Am. 2008, 18, 34–41. [Google Scholar] [CrossRef]
- Camacho, E.; Samad, T.; García-Sanz, M.; Hiskens, I. Control for Renewable Energy and Smart Grids. Available online: http://www.ieeecss.org/general/impact-control-technology (accessed on 16 July 2017).
- Viebahn, P.; Lechon, Y.; Trieb, F. The potential role of concentrated solar power (CSP) in Africa and Europe—A dynamic assessment of technology development, cost development and life cycle inventories until 2050. Energy Policy 2011, 39, 4420–4430. [Google Scholar] [CrossRef]
- Barlev, D.; Vidu, R.; Stroeve, P. Innovation in concentrated solar power. Sol. Energy Mater. Sol. Cells 2011, 95, 2703–2725. [Google Scholar] [CrossRef]
- Zhang, H.; Baeyens, J.; Degrève, J.; Cacères, G. Concentrated solar power plants: Review and design methodology. Renew. Sustain. Energy Rev. 2013, 22, 466–481. [Google Scholar] [CrossRef]
- Ang, K.H.; Chong, G.; Li, Y. PID Control System Analysis, Design, and Technology. IEEE Trans. Control Syst. Technol. 2005, 13, 559–579. [Google Scholar]
- Toodeshki, M.; Askari, J. Model-Reference Adaptive Control for a nonlinear boiler-turbine system. In Proceedings of the IEEE International Conference on Industrial Technology, Chengdu, China, 21–24 April 2008; pp. 1–6. [Google Scholar]
- Wen-Lei, L. Nonlinear uncertain turbine governor design based on adaptive backstepping method. In Proceedings of the 31st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2012; pp. 744–749. [Google Scholar]
- Diaz de Corcuera, A.; Pujana-Arrese, A.; Ezquerra, J.M.; Segurola, E.; Landaluze, J. H∞ based control for load mitigation in wind turbines. Energies 2012, 5, 938–967. [Google Scholar] [CrossRef]
- Nademi, H.; Tahami, F. Robust controller design for governing steam turbine power generators. In Proceedings of the 12th International Conference on Electrical Machines and Systems (ICEMS), Tokyo, Japan, 15–18 November 2009. [Google Scholar]
- Moradi, H.; Bakhtiari-Nejad, F.; Saffar-Avval, M. Robust control of an industrial boiler system; a comparison between two approaches: Sliding mode control & H∞ technique. Energy Convers. Manag. 2009, 50, 1401–1410. [Google Scholar]
- Wu, J.; Nguang, S.K.; Shen, J.; Liu, G.; Li, Y.G. Robust H∞ tracking control of boiler-turbine systems. ISA Trans. 2010, 49, 369–375. [Google Scholar] [CrossRef] [PubMed]
- Mier, D.; Môllenbruck, F.; Jost, M.; Grote, W.; Mônnigmann, M. Model predictive control of the steam cycle in a solar power plant. IFAC-PapersOnLine 2015, 48, 710–715. [Google Scholar] [CrossRef]
- Kordestani, M.; Khoshro, M.; Mirzaee, A. Predictive control of large steam turbines. In Proceedings of the 9th Asian Control Conference (ASCC), Istanbul, Turkey, 23–26 June 2013. [Google Scholar]
- Guihua, H.; Lihua, C.; Junpeng, S.; Zhibin, S. Study of Fuzzy PID Controller for Industrial Steam Turbine Governing System. In Proceedings of the International Symposium of Communications and Information Technology (ISCIT), Beijing, China, 12–14 October 2005; pp. 1275–1279. [Google Scholar]
- Kocaarslan, I.; Cam, E.; Tiryaki, H. A fuzzy logic controller application for thermal power plants. Energy Convers. Manag. 2006, 47, 442–458. [Google Scholar] [CrossRef]
- Chaibakhsh, A.; Ghaffari, A. A Model-based coordinated control concept for steam turbine power plants. J. Eng. 2013, 2013, 1–11. [Google Scholar] [CrossRef]
- Ismail, M. Adaptation of PID controller using AI technique for speed control of isolated steam turbine. In Proceedings of the Japan-Egypt Conference on Electronics, Communications and Computers, Alexandria, Egypt, 6–9 March 2012; pp. 85–90. [Google Scholar]
- Kim, Y.-S.; Chung, I.-Y.; Moon, S.-I. Tuning of the PI Controller Parameters of a PMSG Wind Turbine to Improve Control Performance under Various Wind Speeds. Energies 2015, 8, 1406–1425. [Google Scholar] [CrossRef]
- Perng, J.-W.; Chen, G.-Y.; Hsieh, S.-C. Optimal PID Controller Design Based on PSO-RBFNN for Wind Turbine Systems. Energies 2014, 7, 191–209. [Google Scholar] [CrossRef]
- Li, N.; Lv, L. Parameter optimization for turbine DEH control system based on Improved Genetic Algorithm. In Proceedings of the Chinese Control and Decision Conference, Xuzhou, China, 26–28 May 2010; pp. 3326–3328. [Google Scholar]
- Bolek, W.; Sasiadek, J.; Wisniewski, T. Two-valve control of a large steam turbine. Control Eng. Pract. 2002, 10, 365–377. [Google Scholar] [CrossRef]
- Wang, D.; Wang, Z.; Meng, L.; Han, P. Multi-model based IMC design for steam temperature system of thermal power plant. In Proceedings of the International Conference on Test and Measurement (ICTM), Hong Kong, China, 5–6 December 2009; pp. 5–9. [Google Scholar]
- Dettori, S.; Iannino, V.; Colla, V.; Signorini, A. A fuzzy-logic based tuning approaches of PID control for steam turbines for solar applications. Energy Procedia 2017, 105, 480–485. [Google Scholar] [CrossRef]
- Gu, D.-W.; Petkov, P.; Konstantinov, M.M. Robust Control Design with MATLAB®, 2nd ed.; Springer: Heidelberg, Germany, 2005. [Google Scholar]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control, 2nd ed.; Wiley: New York, NY, USA, 2005. [Google Scholar]
- Zhou, K.; Doyle, J.; Glover, K. Robust and Optimal Control, 1st ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Pourbeik, P. Dynamic models for turbine-governors in power system studies. In IEEE Task Force Report on Turbine Governor Modeling; IEEE Power & Energy Society: Piscataway, NJ, USA, 2013. [Google Scholar]
- Chaibakhsh, A.; Ghaffari, A. Steam turbine model. Simul. Model. Pract. Theory 2008, 16, 1145–1162. [Google Scholar] [CrossRef]
- Dettori, S.; Colla, V.; Salerno, G.; Signorini, A. Steam Turbine models for monitoring purposes. Energy Procedia 2017, 105, 524–529. [Google Scholar] [CrossRef]
- Doyle, J.; Glover, K.; Khargonekar, P.; Francis, B. State-space solutions to standard H2 and H∞ control problems. IEEE Trans. Autom. Control 1989, 34, 831–847. [Google Scholar] [CrossRef]
- Gahinet, P.; Apkarian, P. A linear matrix inequality approach to H∞ control. Int. J. Robust Nonlinear Control 1994, 4, 421–448. [Google Scholar] [CrossRef]
- Iwasaki, T.; Skelton, R. All controllers for the general H∞ control problem: LMI existence conditions and state space formulas. Automatica 1994, 30, 1307–1317. [Google Scholar] [CrossRef]
- Lavretski, E.; Wise, K.A. Robust and Adaptive Control; Springer: Berlin, Germany, 2013. [Google Scholar]
- Åström, K.; Hägglund, T. PID Controllers: Theory Design and Tuning, 2nd ed.; International Society of Automation (ISA): Research Triangle Park, NC, USA, 1995. [Google Scholar]
- Zimmermann, H.-J. Fuzzy programming and linear programming with several objective functions. Fuzzy Sets Syst. 1978, 1, 45–55. [Google Scholar] [CrossRef]
- Sisca, F.G.; Fiasché, M.; Taisch, M. A Novel hybrid modelling for aggregate production planning in a reconfigurable assembly unit for optoelectronics. In ICONIP 2015 Proceeings, Part II, Proceedings of the 22nd International Conference on Neural Information Processing, Istanbul, Turkey, 9–12 November 2015; Springer-Verlag New York, Inc.: New York, NY, USA, 2015; Volume 9490, pp. 571–582. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Value |
|---|---|
| Settling time (s) | 140.1 |
| Rise time (s) | 130.3 |
| Overshoot (%) | 0 |
| IAE | 3.5933104 |
| Order | Settling Time (s) | Rise Time (s) | Overshoot (%) | IAE |
|---|---|---|---|---|
| 4 | 140.2 | 130.4 | 0 | 3.8819104 |
| 35 | 140.1 | 130.3 | 0 | 3.6436104 |
| Controller | Settling Time (s) | Rise Time (s) | Overshoot (%) | IAE |
|---|---|---|---|---|
| PID Governor (Tuning Field) | 148.5 | 138.7 | 0 | 5.3188105 |
| PID Governor (Tuning IAE) | 139.4 | 129.9 | 0.15 | 2.3570104 |
| Multi-Objective | 139.9 | 130.2 | 0 | 3.1240104 |
| Controller | Settling Time (s) | Rise Time (s) | Overshoot (%) | IAE |
|---|---|---|---|---|
| PID Governor (Tuning Field) | 179.4 | 137.9 | 0 | 1.0283106 |
| PID Governor (Tuning IAE) | 141.7 | 130.7 | 0 | 6.1366104 |
| Multi-Objective | 140.7 | 130 | 0 | 5.1867104 |
| Controller | Settling Time (s) | Rise Time (s) | Overshoot (%) | IAE |
|---|---|---|---|---|
| PID Governor (Tuning Field) | 243.1 | 147.2 | 1.64 | 9.3471105 |
| PID Governor (Tuning IAE) | 143.1 | 131.9 | 2.1 | 7.7127104 |
| Multi-Objective | 141.7 | 130.9 | 0.9 | 5.4491104 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iannino, V.; Colla, V.; Innocenti, M.; Signorini, A. Design of a H∞ Robust Controller with μ-Analysis for Steam Turbine Power Generation Applications. Energies 2017, 10, 1026. https://doi.org/10.3390/en10071026
Iannino V, Colla V, Innocenti M, Signorini A. Design of a H∞ Robust Controller with μ-Analysis for Steam Turbine Power Generation Applications. Energies. 2017; 10(7):1026. https://doi.org/10.3390/en10071026
Chicago/Turabian StyleIannino, Vincenzo, Valentina Colla, Mario Innocenti, and Annamaria Signorini. 2017. "Design of a H∞ Robust Controller with μ-Analysis for Steam Turbine Power Generation Applications" Energies 10, no. 7: 1026. https://doi.org/10.3390/en10071026
APA StyleIannino, V., Colla, V., Innocenti, M., & Signorini, A. (2017). Design of a H∞ Robust Controller with μ-Analysis for Steam Turbine Power Generation Applications. Energies, 10(7), 1026. https://doi.org/10.3390/en10071026