A Data-Driven, Cooperative Approach for Wind Farm Control: A Wind Tunnel Experimentation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Formulation of Wind Farm Power Maximization Problem
3. Bayesian Ascent Method
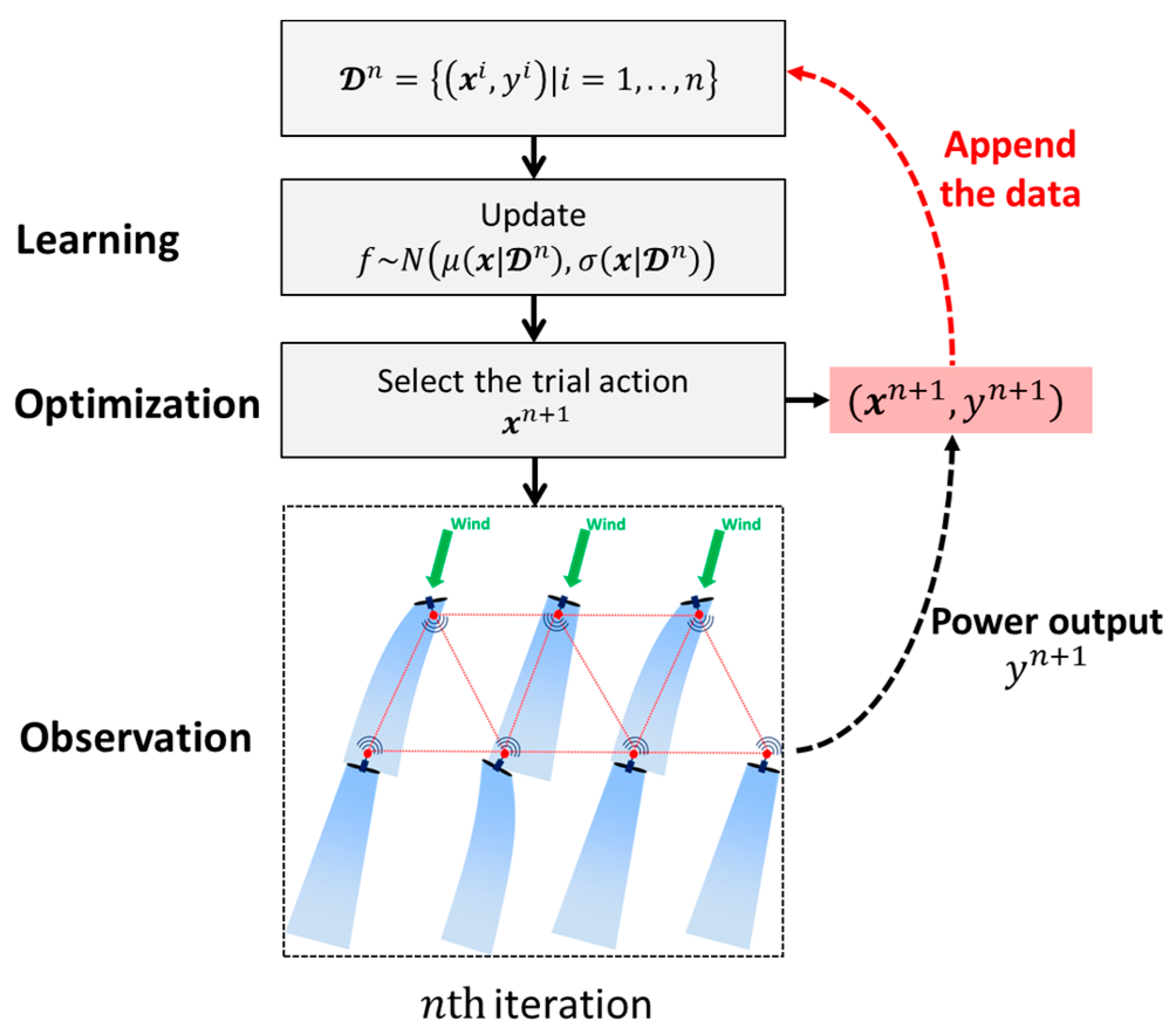
- Learning: the unknown wind farm power function is modelled by Gaussian Process regression using the historical data , where is the control actions for all the wind turbines in a wind farm at the th iteration, and is the corresponding total wind farm power output (i.e., the sum of the power outputs from all the wind turbines) measured at the th iteration. GP regression can model the target function probabilistically and thus can quantify the uncertainty in the target value. Uncertainty quantification plays a crucial role when we determining the next control input online. In addition, as a non-parametric regression model, GP regression can model complex target function without assuming the basis function of the target function while using a small number of data points.
- Optimization: the next trial control actions for all the wind turbines are determined.
- Observation: the next trial control actions are executed and the corresponding total wind farm power output is obtained. The pair of the input and the output will then be used to update the regression model for the target function in the next iteration.
3.1. Learning
3.2. Optimization
3.3. Observation
| Algorithm 1. Bayesian Ascent (BA) algorithm. |
| Choose and (initial trust region size) and observe |
| Repeat until convergence, |
| 1: Optimize the hyper parameters: 2: Construct a GP regression to approximate : |
| 3: Select the next input by solving: |
| 4: Append the data |
| 5: Update the size of trust region: |
| 6: if then |
| 7: , |
| 8: else |
| 9: |
| 10: end if |
4. Wind Tunnel Experimental Setups
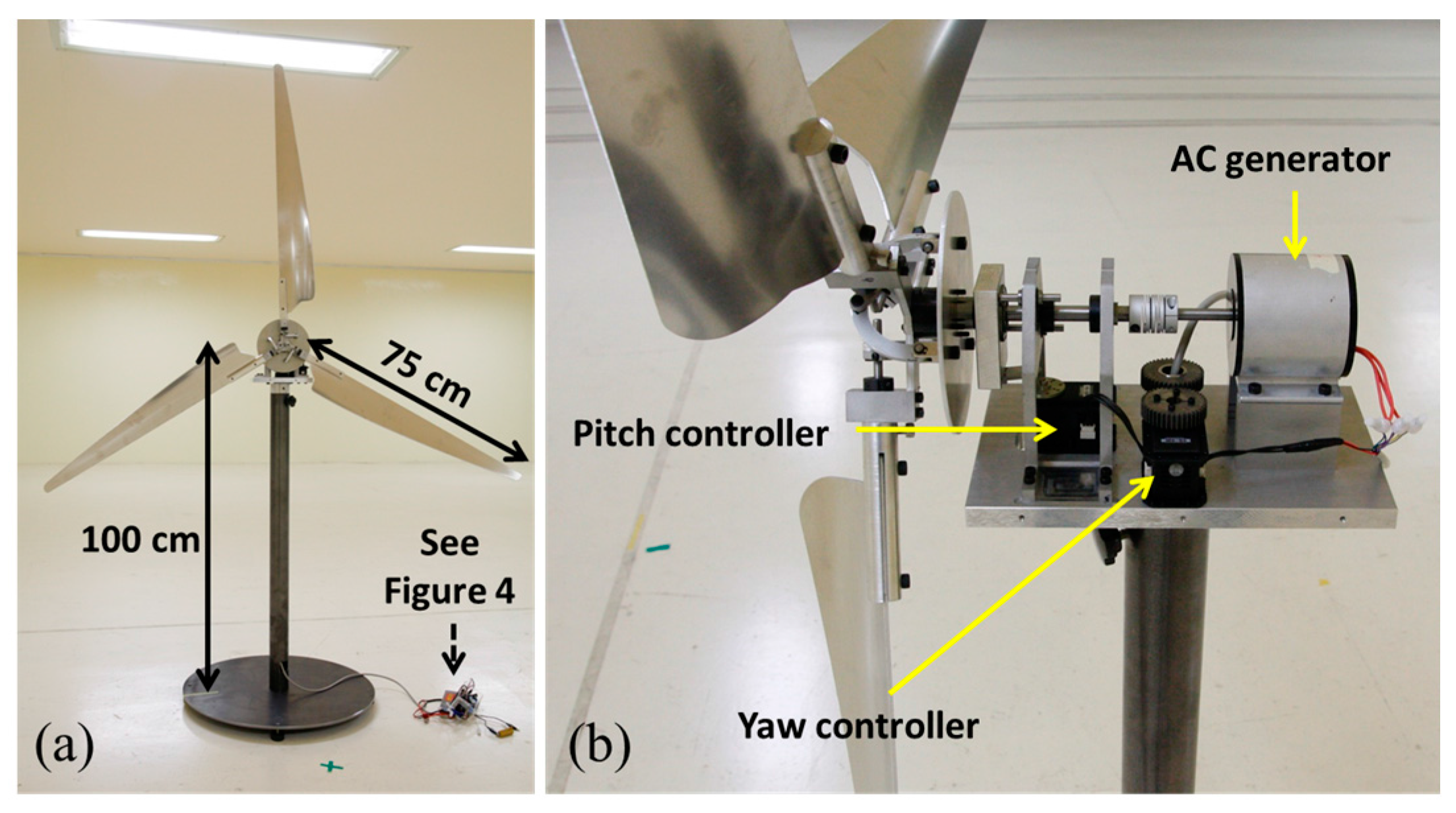
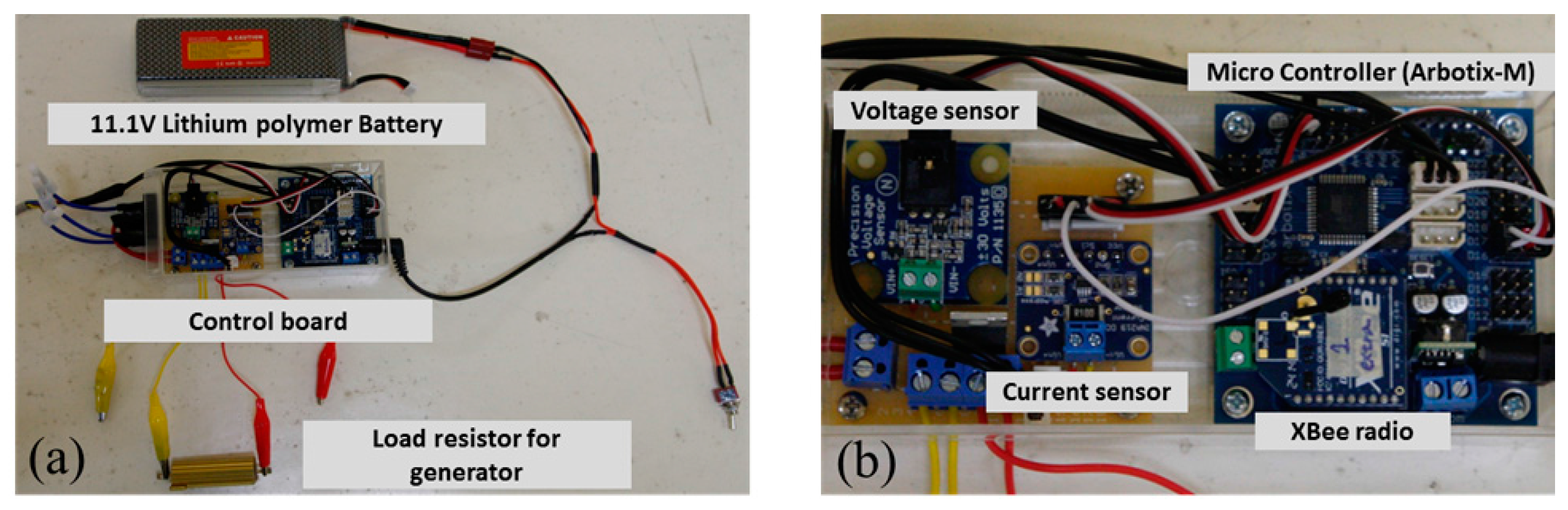
4.1. Wind Turbine Model and Control Mechanisms
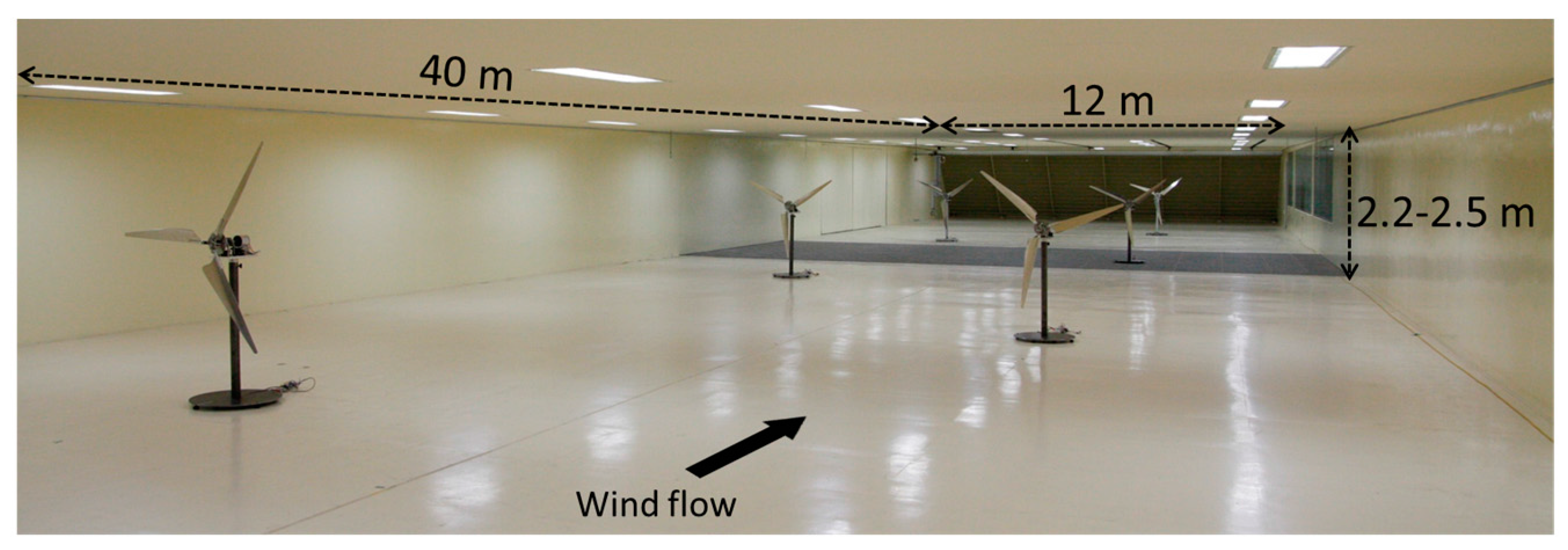
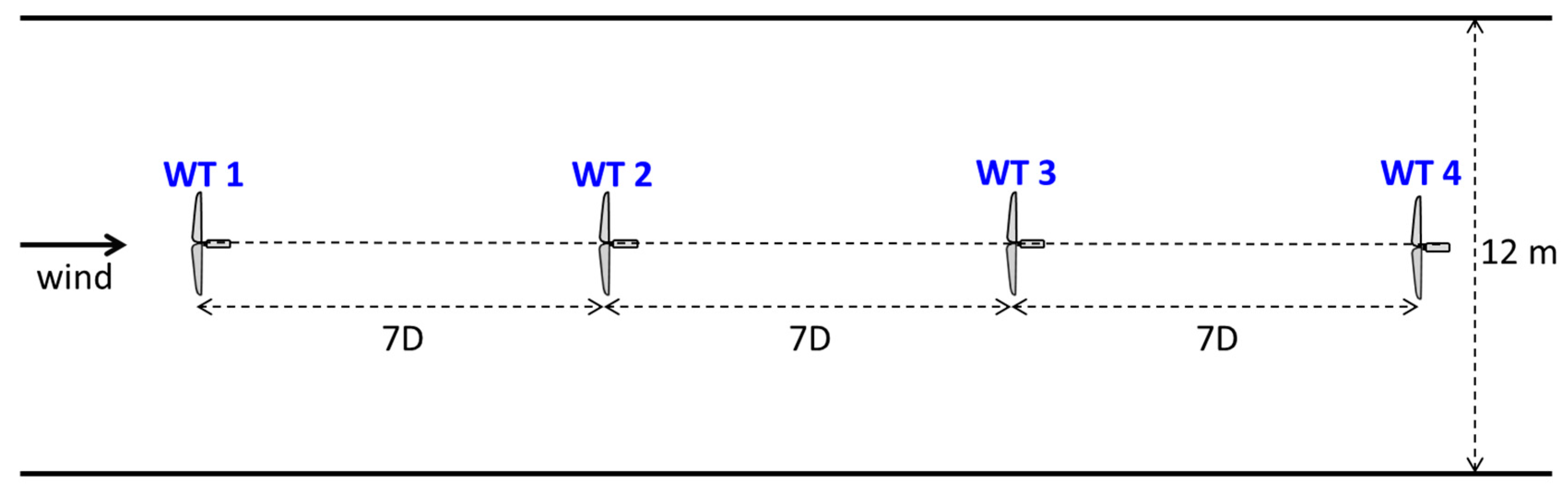
4.2. Wind Tunnel Experiments
- : Freestream maximum power of wind turbine that can be produced at a given location when there is no wake interference. for is individually determined by iteratively changing the pitch angle of wind turbine located at its designated position in the wind tunnel. The reason why we measure of all the wind turbines is that the wind flow conditions (i.e., wind speed and turbulence intensity) are different depending on the location in the wind turbine. The measured power normalized by then represents the power efficiency for the wind turbine . The total wind farm power is computed , where is the number of wind turbines considered. The maximum total wind farm power will be used to normalize the cooperative control results for comparing the relative improvement over the greedy control strategy.
- : Greedy maximum power of wind turbine that can be produced at a given location when the upstream wind turbines are producing their maximum powers. for the first upstream wind turbine is same as . For a downstream wind turbine , , is individually determined by iteratively changing the blade pitch angle of wind turbine when the upstream wind turbines are operated with their greedy control strategy. The wind farm power efficiency for the greedy control strategy is then computed as .
5. Wind Tunnel Experiment Results
5.1. Scenario 1: Effects of the Number of Wind Turbines
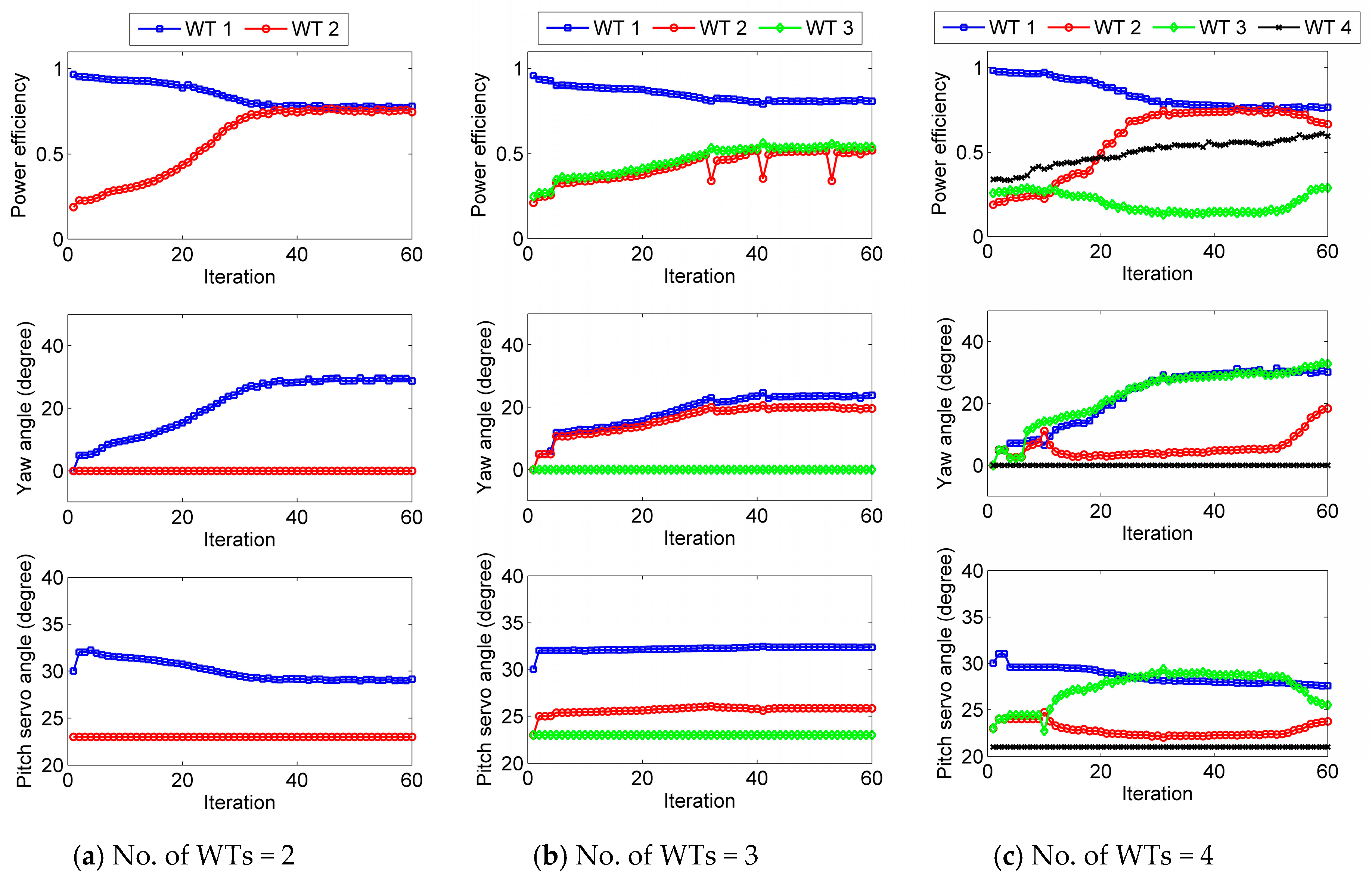
- As shown in Figure 7, for cooperative control, the wind turbines collectively adjust their control actions determined by the BA algorithm to increase the total wind farm power production.
- As shown in Figure 7, the cooperative control actions lower the power production for the first upstream wind turbine but significantly increase the power production of the downstream wind turbines. As a result, power produced by the wind turbines are more evenly distributed after the coordination, which could be beneficial for maintaining the wind turbines since the electrical and structural components experience similar level of loads.
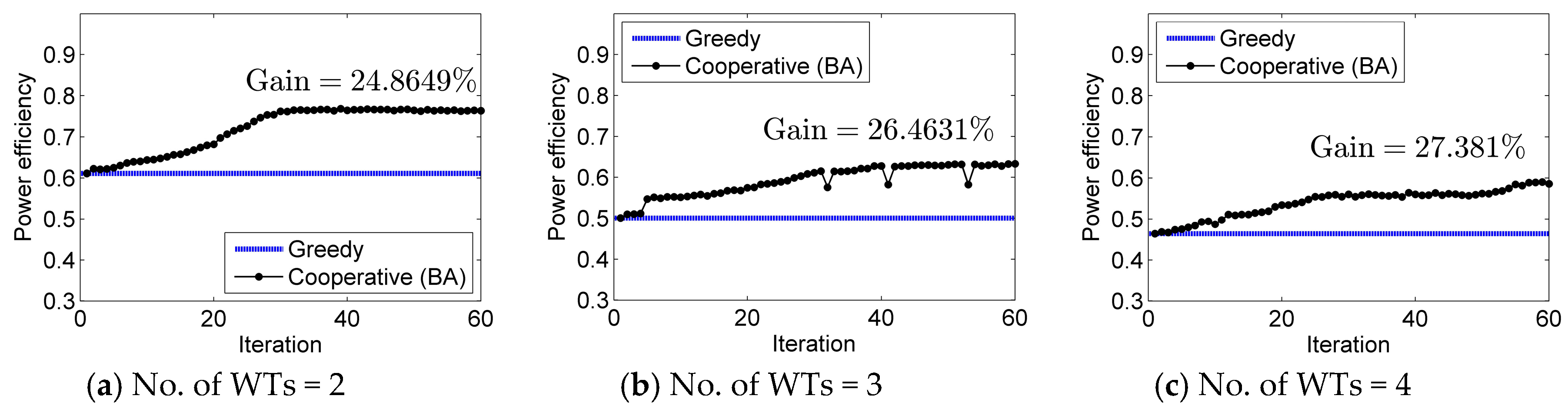
- As the number of wind turbines increases, as shown in Figure 8, the initial (greedy) wind farm power efficiency decreases because more downstream wind turbines are affected by wake interference. Furthermore, as the number of wind turbines increases, the relative improvement by the cooperative control actions increases.
- As shown in Figure 8, BA increases the wind farm power efficiency almost monotonically by gradually changing the control actions of the wind turbine.
- As the number of the wind turbine considered for cooperative control increases, more iterations are required for the BA algorithm to converge on the (local) optimum.
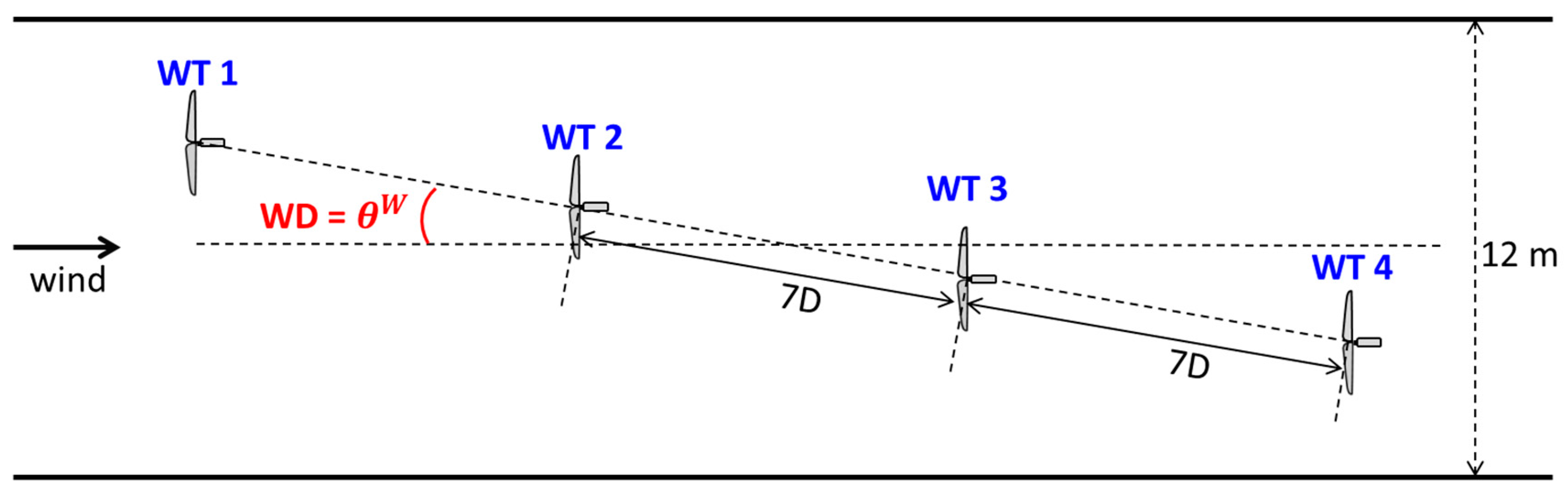
5.2. Scenario 2: Influences of the Wind Direction
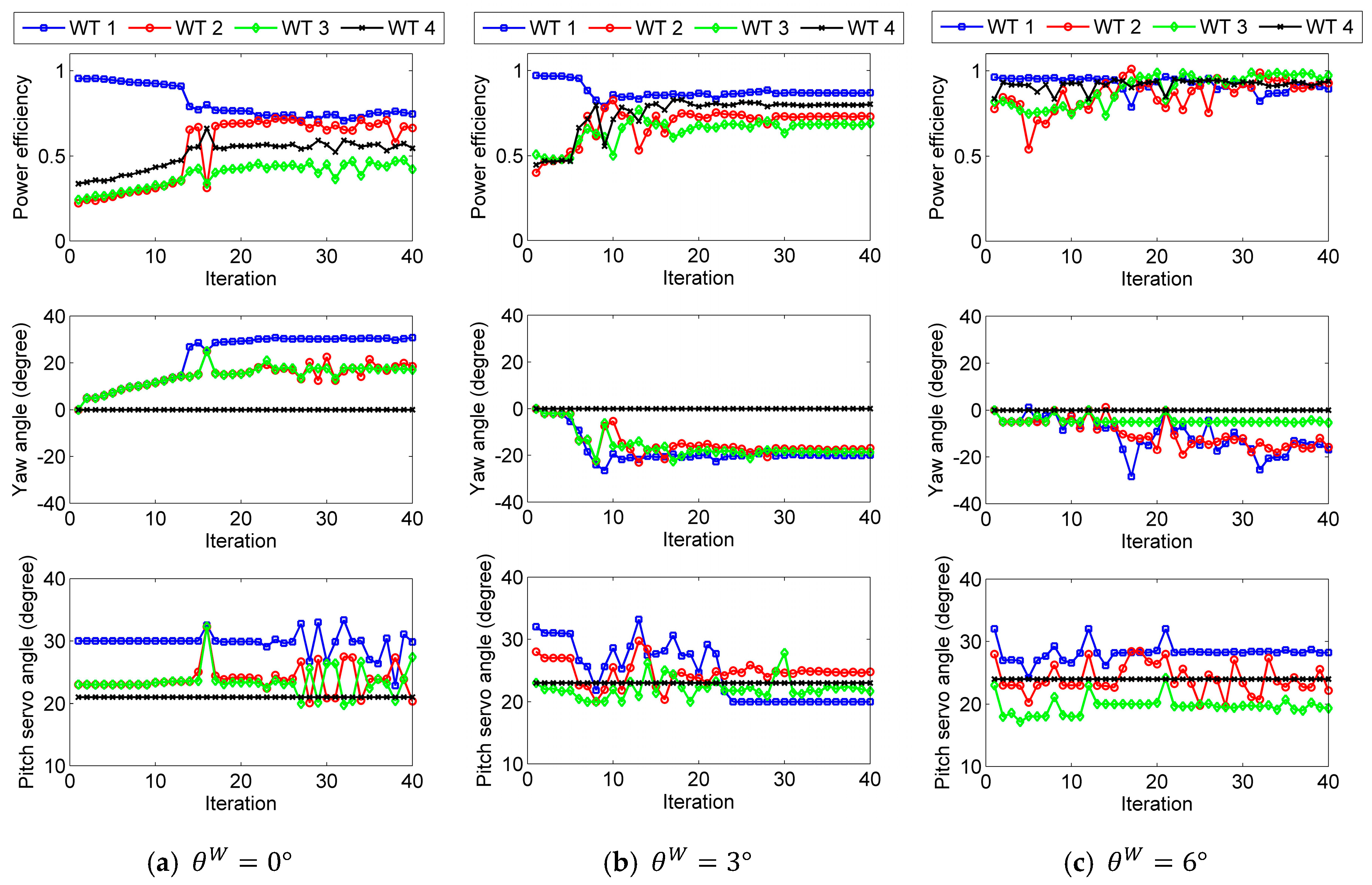
- As shown in Figure 10a, when the wind direction is set at where the wake is perfectly aligned with the wind turbine array, the initial power production by the downstream wind turbines, WT 2, WT 3 and WT 4, is only a small fraction of the power produced by the upstream wind turbine in the front. As the wind direction deviates from , the downstream wind turbines are affected less by the wakes formed by the upstream wind turbines and produce more power initially, as shown in Figure 10b,c.
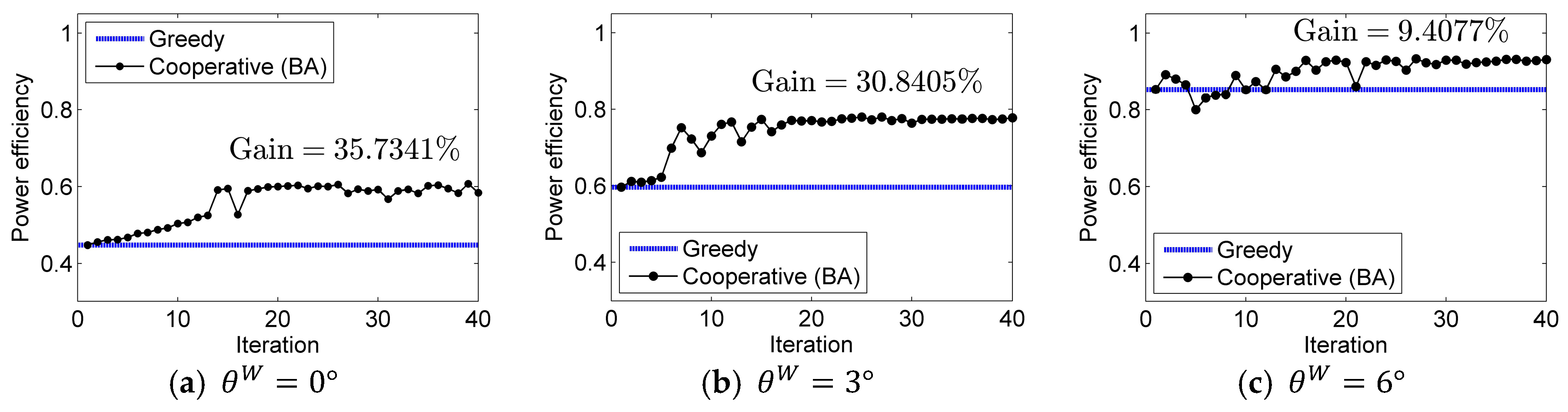
- As shown in Figure 11, the wind farm power efficiency with the greedy control strategy increases as the wind direction deviates from . For example, when , the wind farm power efficiency is above 80% even before executing the cooperative control strategy. When the cooperative control strategy is employed, the wind farm power efficiency further increases. Note that the differences between the optimum power output and the initial (greedy) power production of the four wind turbines become smaller as the wind direction increases.
- As in Scenario 1, the BA algorithm effectively increases the wind farm power efficiency using a small number of trial actions.
- When , the direction of yaw offset angle is not critical to improve the total wind farm power. However, when and , only the yaw offset angle in counterclockwise (negative) can increase the wind powers of the downstream wind turbines due to asymmetric configuration of the wind turbine layout. If the yaw-offset angle of the upstream wind turbine is imposed in the opposite direction, the wake generated by the upstream wind turbine will be skewed toward the downstream wind turbines, which will reduce the powers of the downstream wind turbines.
- When , more iterations are required for the BA algorithm to converge on the local optimum. This is because the effects of changing control actions on the total wind farm power is not significant as for the cases and . Such small increases in the control effects make it difficult for the BA algorithm to reliably estimate the ascending direction.
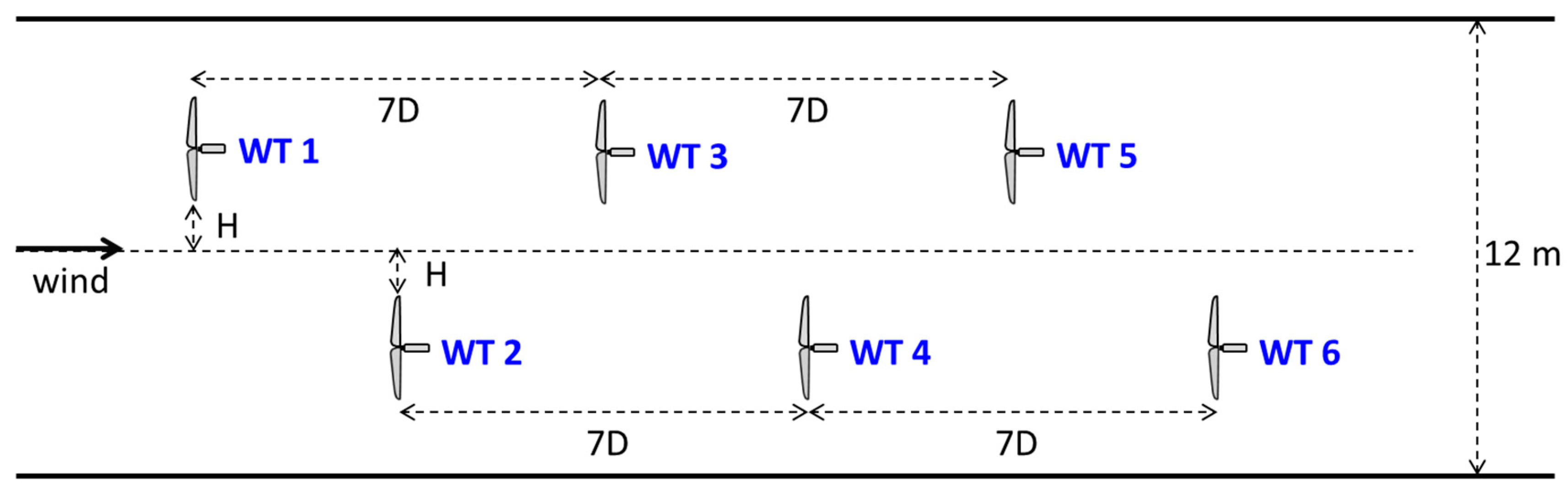
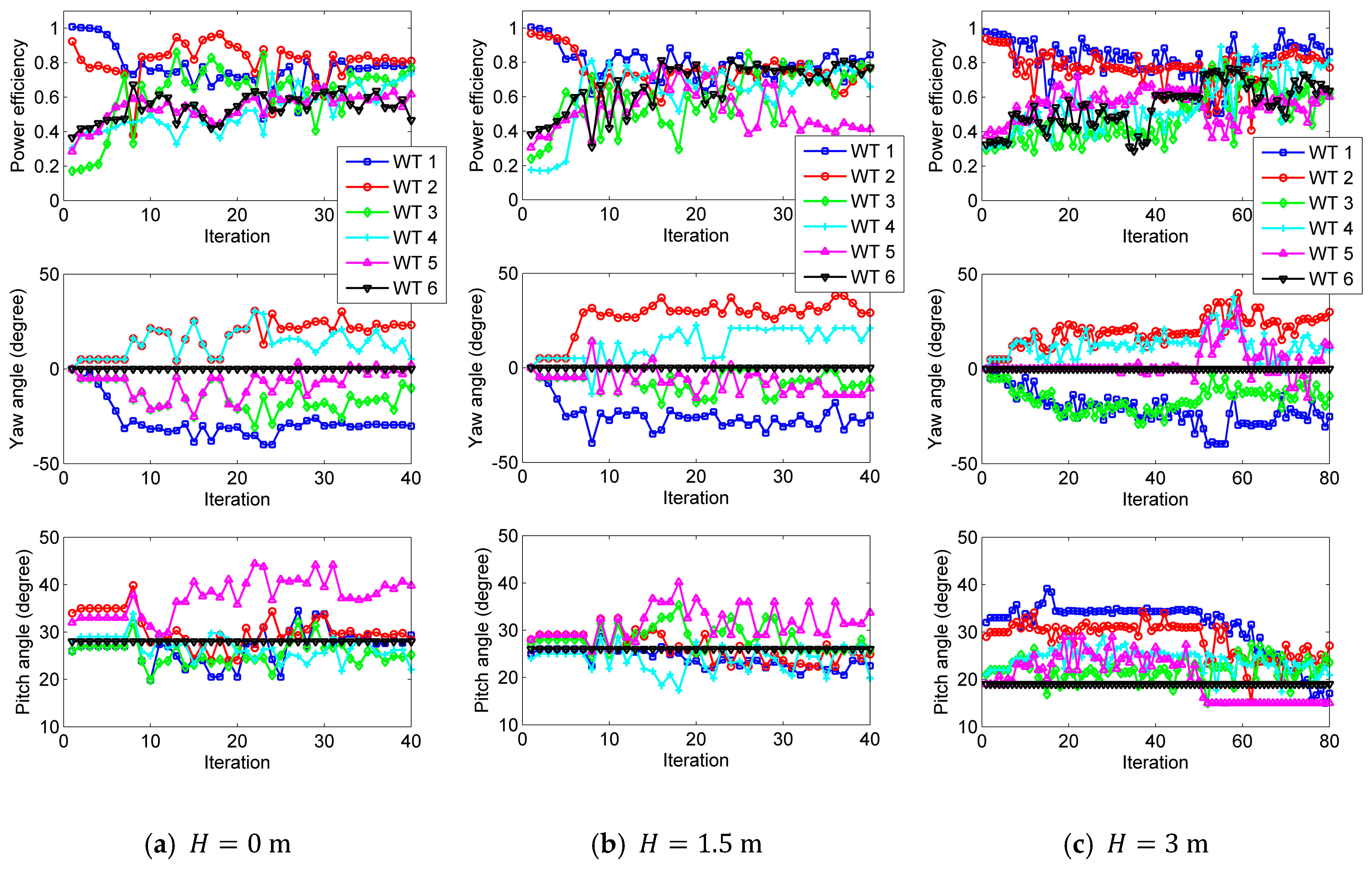
5.3. Scenario 3: Grid Wind Farm Layout
- As shown in Figure 13, the two upstream wind turbines WT 1 and WT 2, shown in Figure 12, produce the powers that are comparable to the maximum free stream powers. When the cooperative control is employed, these two upstream wind turbines offset their yaw angles the most (compared to other wind turbines) so that the power production of the downstream wind turbines, and thus the total power production, increases.
- It is interesting to note that WT 1 and WT 3 offset the yaw angles in a clockwise direction while WT 2 and WT 4 offset in counter clockwise direction such that the wakes are diverted away from the downstream wind turbines.
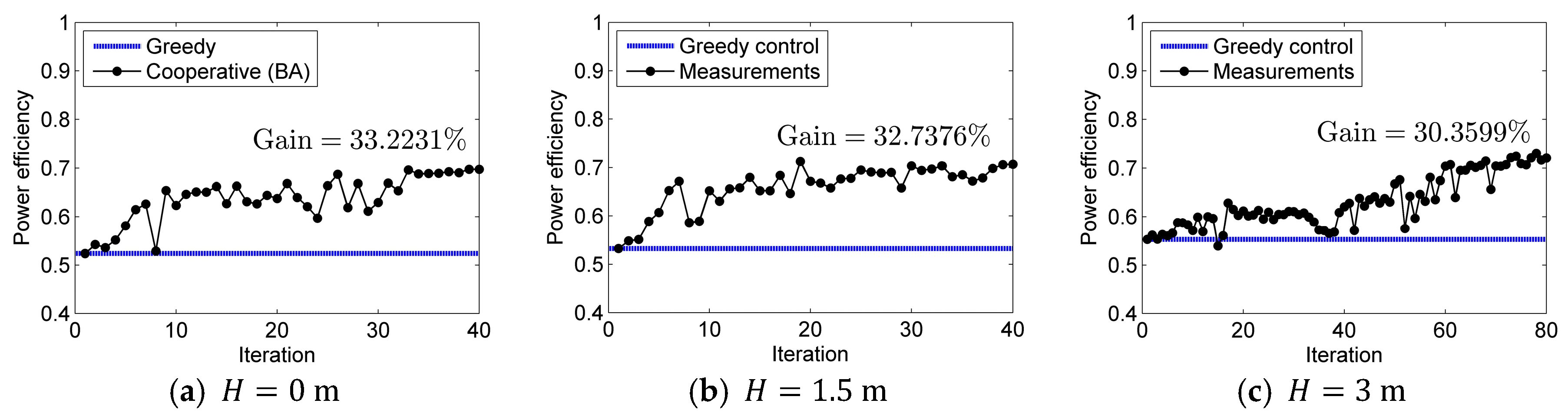
- As shown in the Figure 14, the lateral distance does not dramatically influence the wind farm power efficiencies for both the greedy and the cooperative control strategies. This result implies that the cooperative control strategy would still be effective for a wind farm where wind turbines are placed closely together.
- When , the convergence rate of the BA algorithm is slower than the other cases. The BA algorithm requires a large number of trail actions initially before finally converging to the local optimum.
6. Discussion and Conclusions
Author Contributions
Conflicts of Interest
References
- Adaramola, M.S.; Krogstad, P.A. Experimental investigation of wake effects on wind turbine performance. Renew. Energy 2011, 36, 2078–2086. [Google Scholar] [CrossRef]
- Dahlberg, J.; Medici, D. Potential improvement of wind turbine array efficiency by active wake control. Proc. Eur. Wind Energy Conf. 2013, 65–84. [Google Scholar]
- Medici, D. Experimental Studies of Wind Turbine Wakes: Power Optimization and Meandering. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2005. [Google Scholar]
- Marathe, N.; Swift, A.; Hirth, B.; Walker, R.; Schroeder, J. Characterizing power performance and wake of a wind turbine under yaw and blade pitch. Wind Energy 2015, 19, 963–978. [Google Scholar] [CrossRef]
- Campagnolo, F.; Petrović, V.; Bottasso, C.L.; Croce, A. Wind tunnel testing of wake control strategies. In Proceedings of the American Control Conference, Boston, MA, USA, 6–8 July 2016; pp. 513–518. [Google Scholar]
- Gebraad, P.M.O.; Wingerden, J.W. Maximum power-point tracking control for wind farms. Wind Energy 2015, 18, 429–447. [Google Scholar] [CrossRef]
- Gebraad, P.M.O.; Teeuwisse, F.; Wingerden, J.; Fleming, P.; Ruden, S.; Marden, J.; Pao, L. Wind plant power optimization through yaw control using a parametric model for wake effects—A CFD simulation study. Wind Energy 2016, 1, 95–114. [Google Scholar] [CrossRef]
- Fleming, P.A.; Gebraad, P.M.O.; Lee, S.; Wingerden, J.W.; Johnson, K.; Churchfield, M.; Moriarty, P. Simulation comparison of wake mitigation control strategies for a two-turbine case. Wind Energy 2014, 18, 2135–2143. [Google Scholar] [CrossRef]
- Fleming, P.A.; Gebraad, P.M.O.; Lee, S.; van Wingerden, J.W.; Johnson, K.; Churchfield, M.; Michalakes, J.; Spalart, P.; Moriarty, P. Evaluating techniques for redirecting turbine wakes using SOWFA. Renew. Energy 2014, 70, 211–218. [Google Scholar] [CrossRef]
- Park, J.; Law, K. Cooperative wind turbine control for maximizing wind farm power using sequential convex programming. Energy Convers. Manag. 2015, 101, 295–316. [Google Scholar] [CrossRef]
- Marden, J.; Ruben, S.; Pao, L. A model-free approach to wind farm control using game theoretic methods. IEEE Trans. Control Syst. Technol. 2013, 21, 1207–1214. [Google Scholar] [CrossRef]
- Campagnolo, F.; Petrović, V.; Schreiber, J.; Nanos, E.M.; Croce, A.; Bottasso, C.L. Wind tunnel testing of a. closed-loop wake detection controller for wind farm power maximization. J. Phys. Conf. Ser. 2016, 753, 032006. [Google Scholar] [CrossRef]
- Bronchu, E.; Cora, M.V.; Freitas, N. A Tutorial on Bayesian Optimization of Expensive Cost Functions with Application to Active User Modelling and Hierarchical Reinforcement Learning; Department of Computer Science, University of British Columbia: Vancouver, BC, Canada, 2013. [Google Scholar]
- Osborne, M. Bayesian Gaussian Process for Sequential Prediction, Optimization and Quadrature. Ph.D. Thises, Department of Computer Science, University of Oxford, Oxford, UK, 2010. [Google Scholar]
- Park, J. Data-Driven Cooperative Wind Farm Control. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2016. [Google Scholar]
- Jones, D.; Schonlau, M.; Welch, W. Efficient global optimization of expensive black-box functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Park, J.; Law, K. A Bayesian optimization approach for wind farm power maximization. In Proceedings of the Smart Sensor Phenomena, Technology, Networks, and Systems Integration 2015, San Diego, CA, USA, 8 March 2015. [Google Scholar]
- Nash, J. Equilibrium points in n-person games. Proc. Natl. Acad. Sci. USA 1950, 36, 48–49. [Google Scholar] [CrossRef] [PubMed]
- Rasmussen, C.E.; Williams, C.K. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Neal, R.M. Bayesian Learning for Neural Networks; Springer: New York, NY, USA, 1996. [Google Scholar]
- Mockus, J.; Fretitas, A.; Castelanous, J.A. Toward Global Optimization; North-Holland: Amsterdam, NY, USA, 1978. [Google Scholar]
- Nocedal, J.; Wright, S. Numerical Optimization; Springer: New York, NY, USA, 2000. [Google Scholar]














© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Kwon, S.-D.; Law, K. A Data-Driven, Cooperative Approach for Wind Farm Control: A Wind Tunnel Experimentation. Energies 2017, 10, 852. https://doi.org/10.3390/en10070852
Park J, Kwon S-D, Law K. A Data-Driven, Cooperative Approach for Wind Farm Control: A Wind Tunnel Experimentation. Energies. 2017; 10(7):852. https://doi.org/10.3390/en10070852
Chicago/Turabian StylePark, Jinkyoo, Soon-Duck Kwon, and Kincho Law. 2017. "A Data-Driven, Cooperative Approach for Wind Farm Control: A Wind Tunnel Experimentation" Energies 10, no. 7: 852. https://doi.org/10.3390/en10070852
APA StylePark, J., Kwon, S. -D., & Law, K. (2017). A Data-Driven, Cooperative Approach for Wind Farm Control: A Wind Tunnel Experimentation. Energies, 10(7), 852. https://doi.org/10.3390/en10070852