
Review of Reactive Power Dispatch Strategies for Loss Minimization in a DFIG-based Wind Farm



Abstract
:1. Introduction
2. Reactive Power Sources and Loss Models
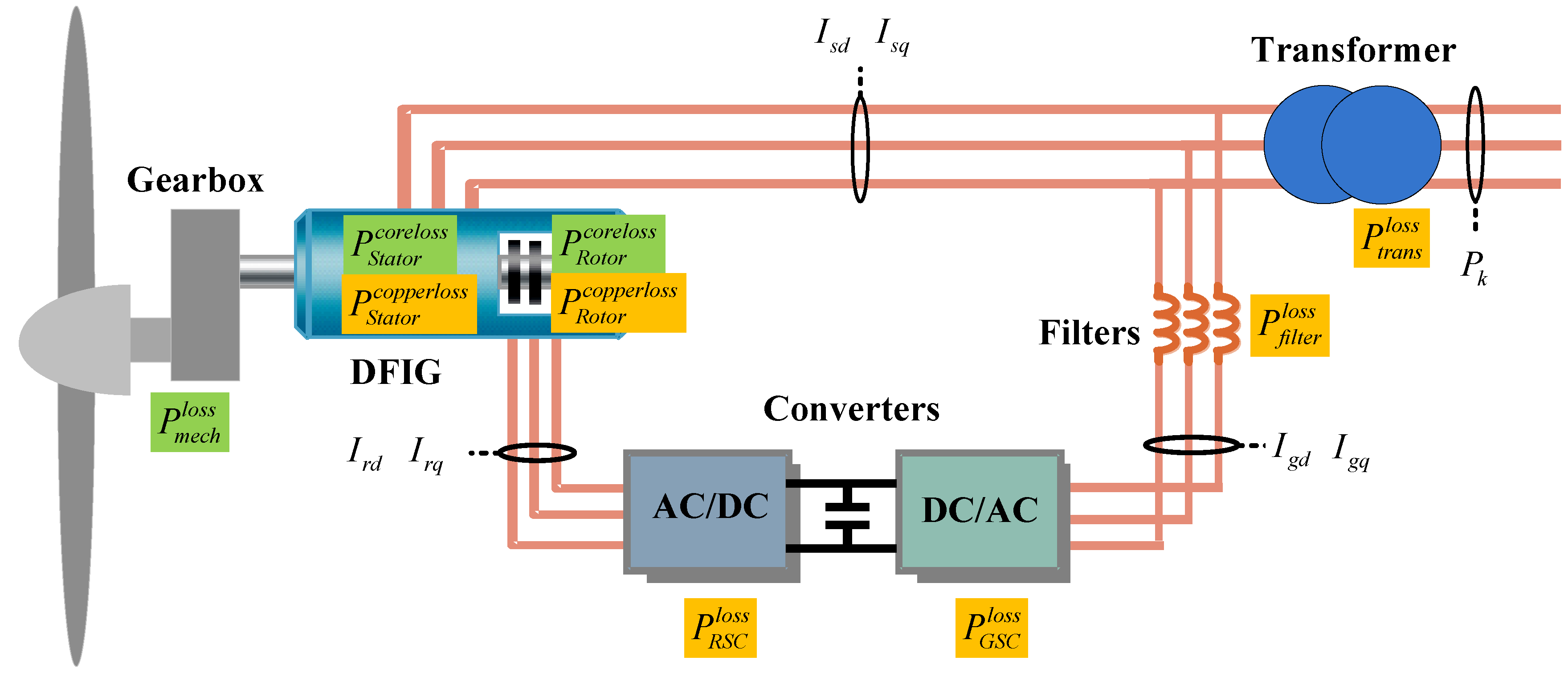
2.1. Loss Model of DFIG
2.2. Loss Model of Converters and the Filter
2.3. Loss Model of Transformers
2.4. Loss Model of Cables
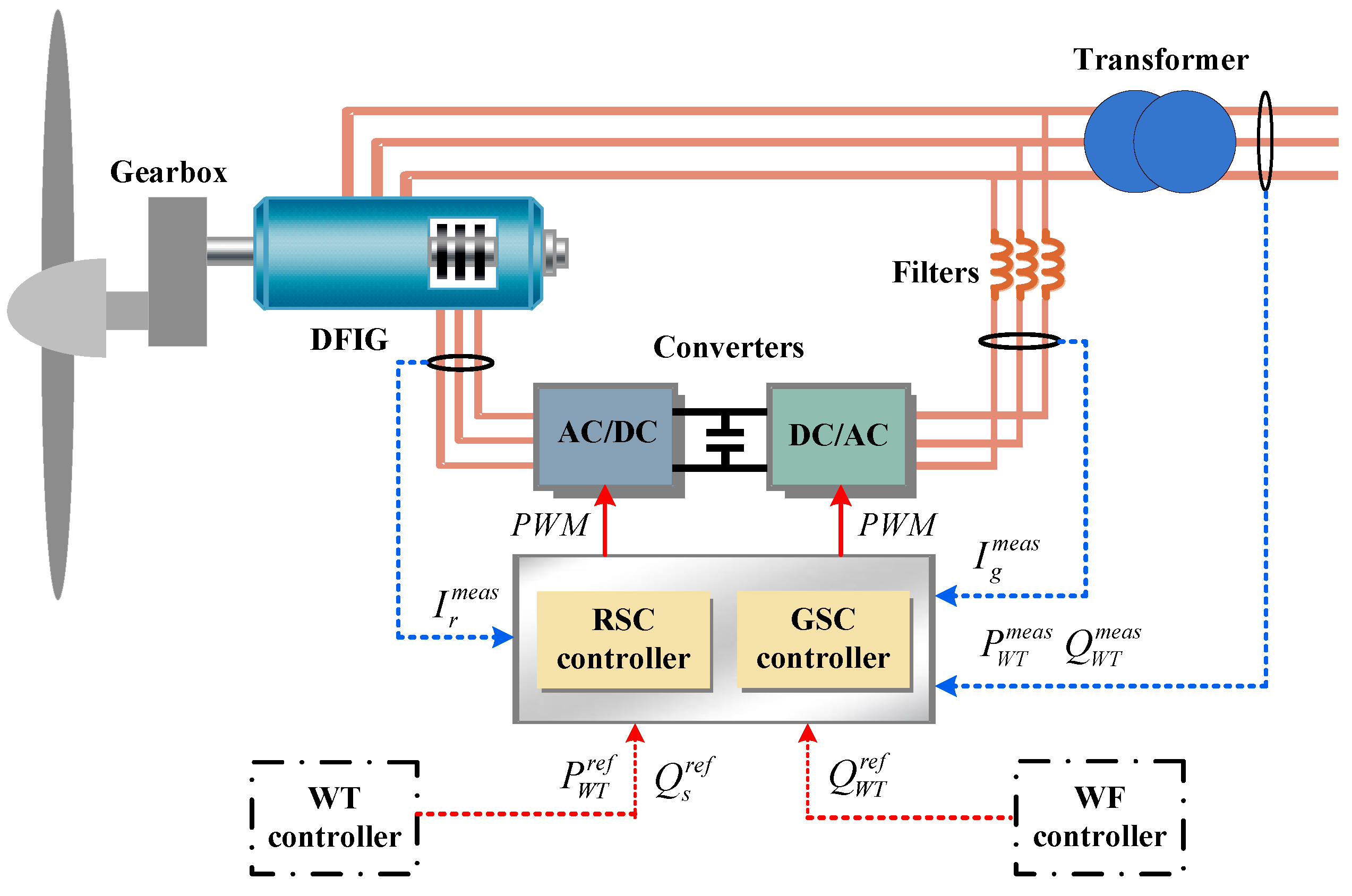
3. Reactive Power Control Inside a DFIG based WT System
3.1. Strategy 1: = 0
3.2. Strategy 2: = 0
3.3. Strategy 3: Minimum Copper Loss Control
3.4. Strategy 4: Minimum WT Loss Control
3.5. Range of Reactive Power
4. Reactive Power Dispatch Strategies within a WF
4.1. Strategy A: Proportional Dispatch
4.2. Strategy B: WF Transmission Loss Minimization
4.3. Strategy C: WF Total Loss Minimization
5. Combinations of WT Level Control and WF Level Dispatch and the Optimization Method
5.1. Combinations of WT Level Control and WF Level Dispatch
5.2. Optimization Method
6. Case Study
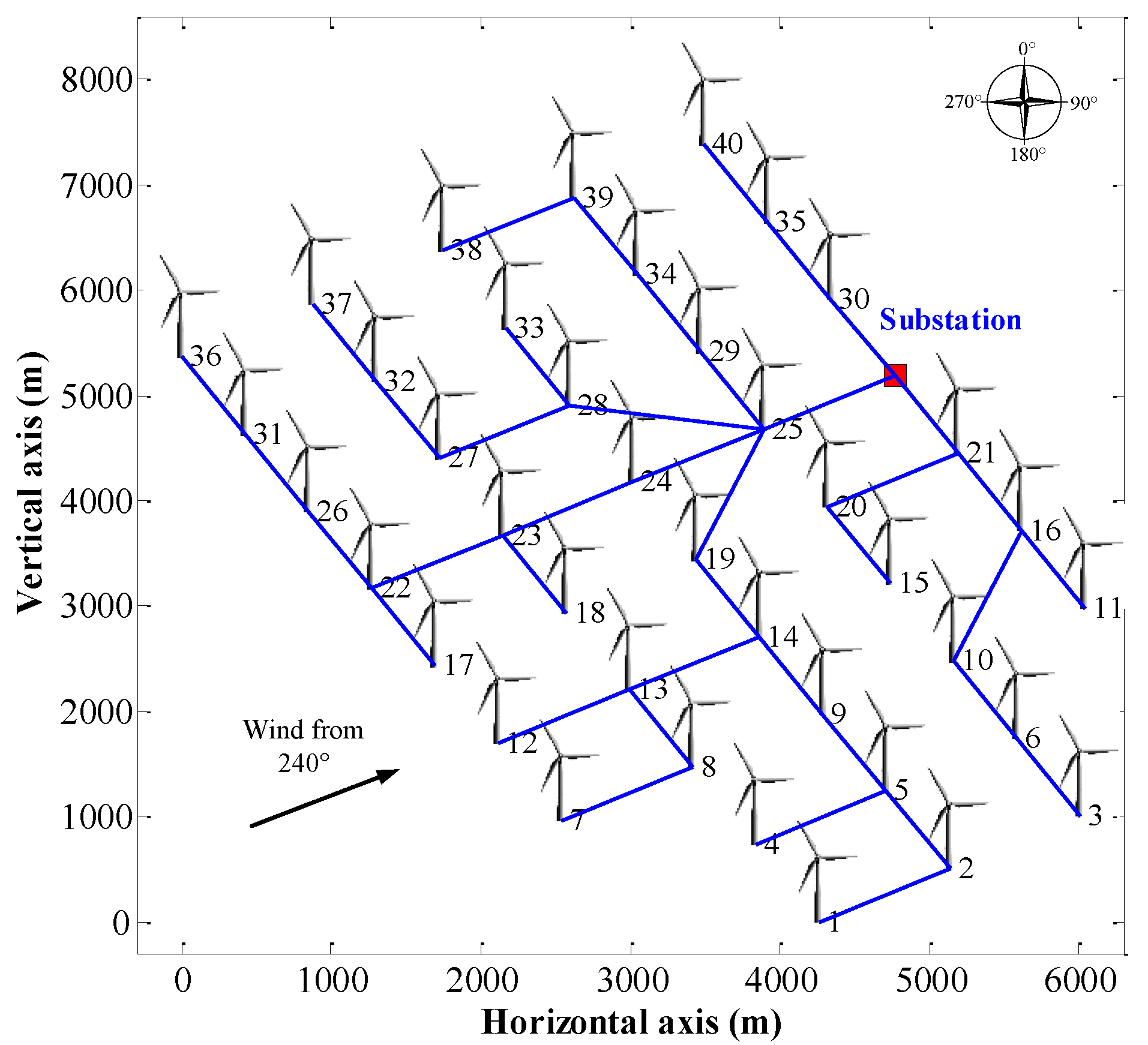
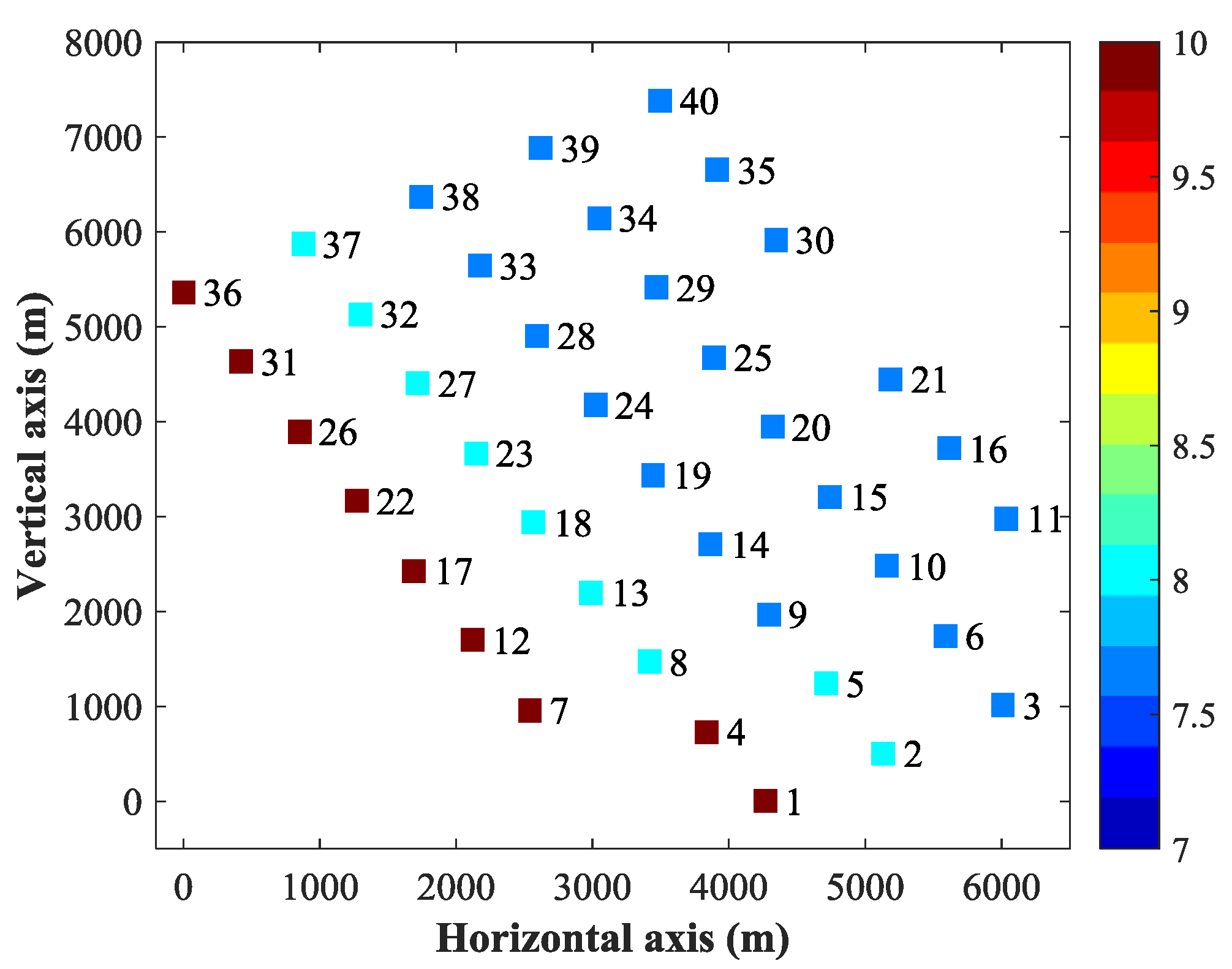
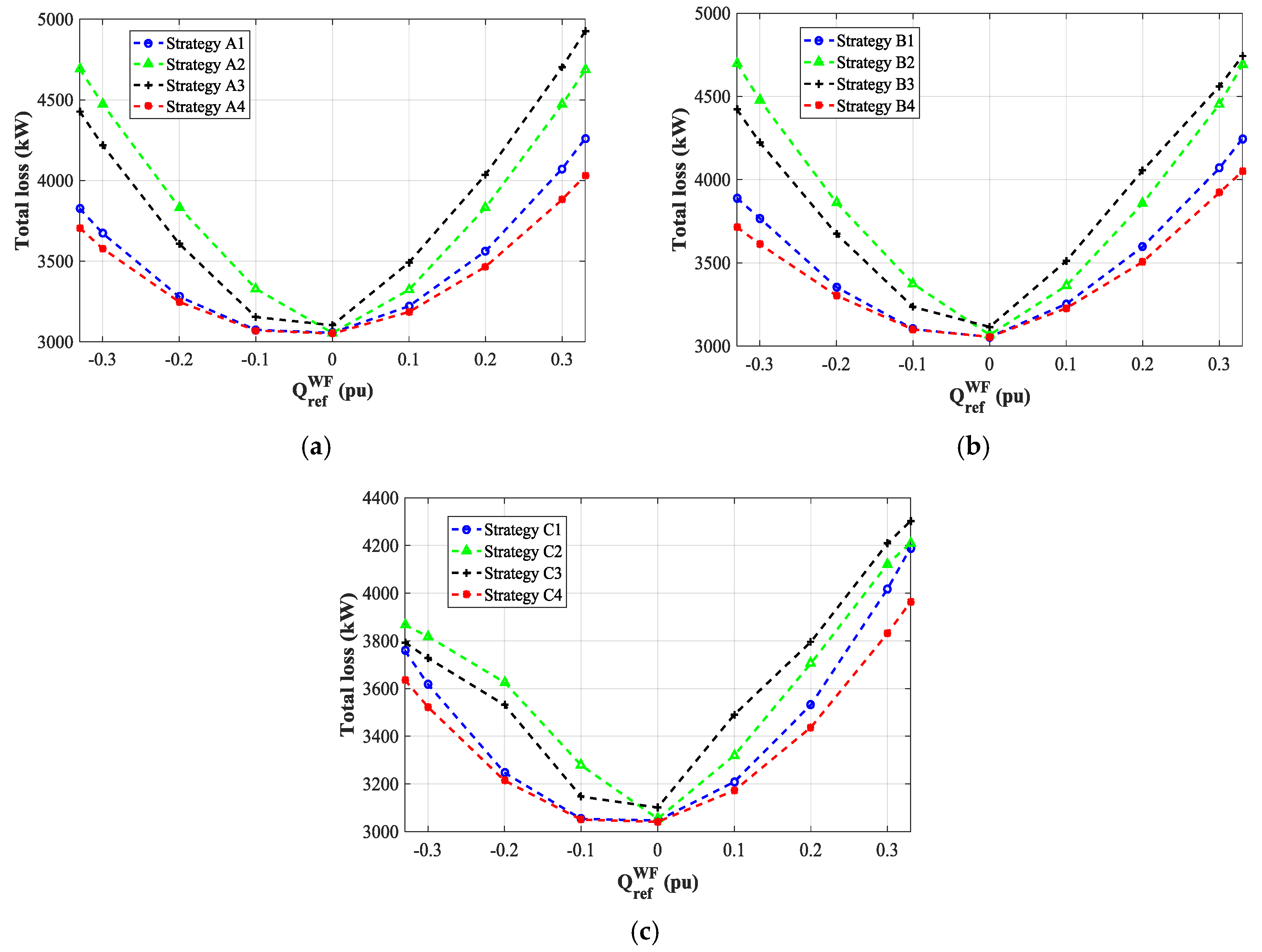
6.1. Case I: V = 10 m/s, Wind Direction = 240°
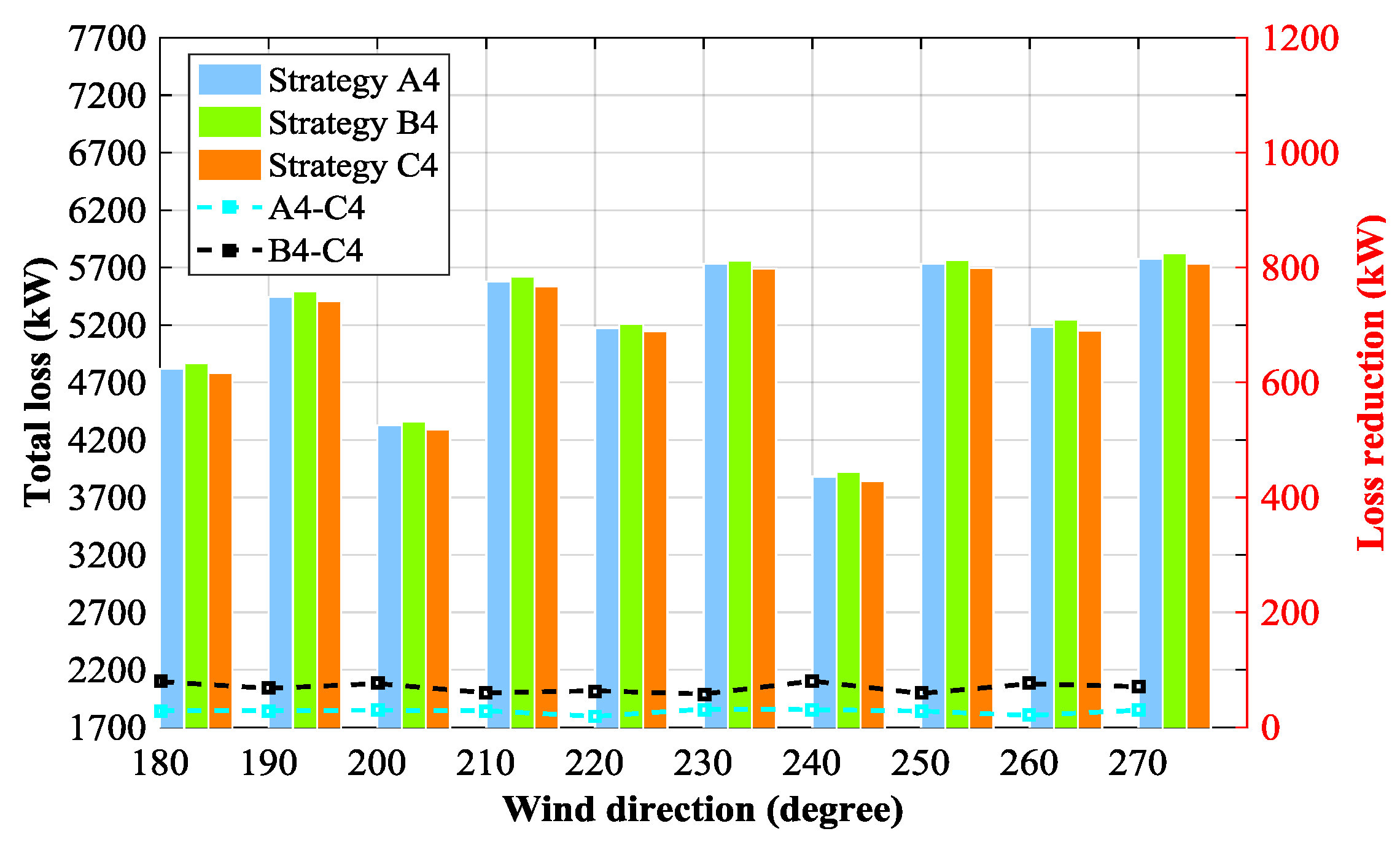
6.2. Case II:
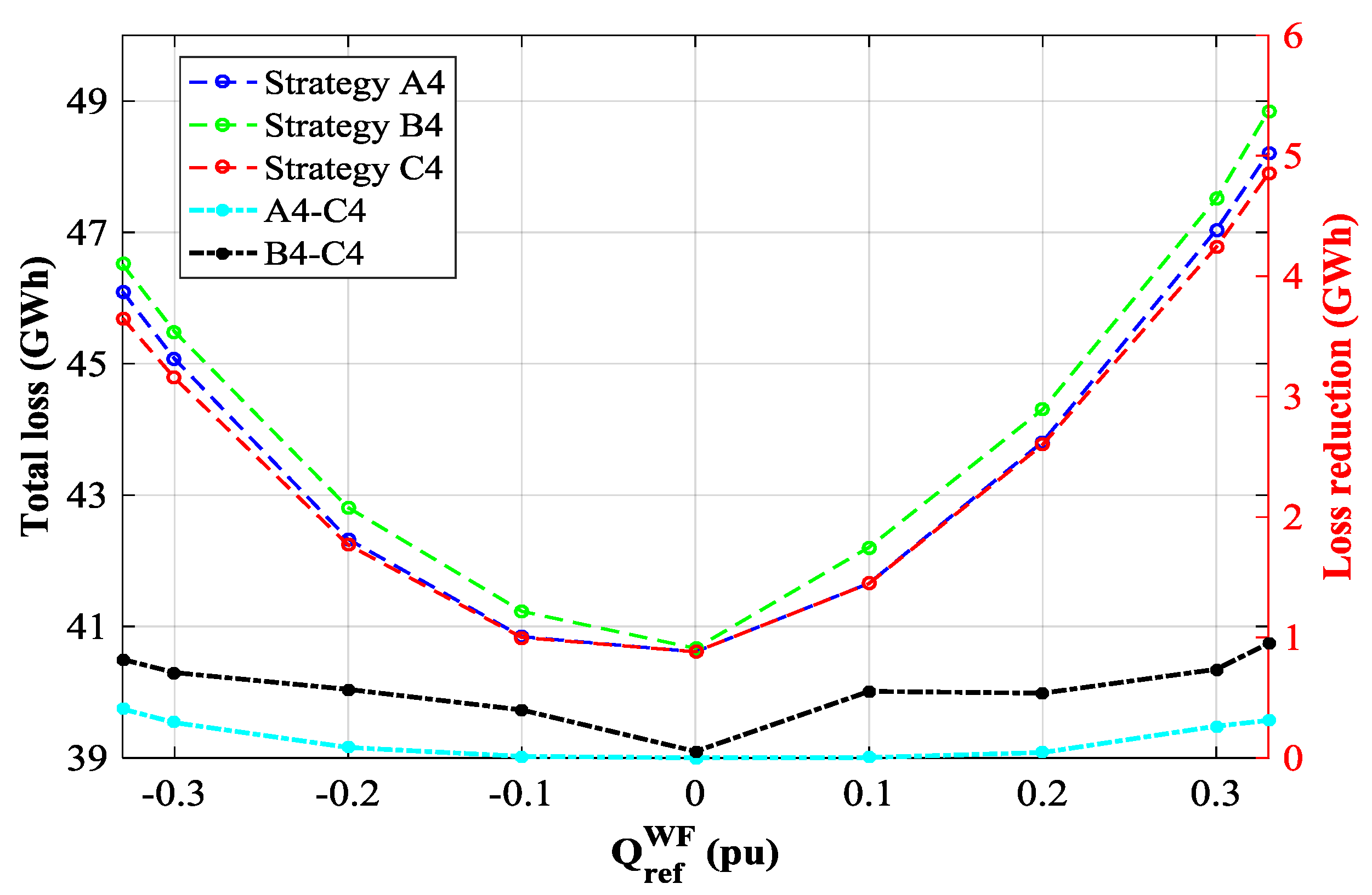
6.3. Case III: Total WF Loss in a Year
7. Conclusions
- The reactive power control strategies on the WF level and the WT level interact with each other and should be considered at the same time to achieve a further loss reduction.
- When considering the loss minimization in the WF, the losses of every device, including the losses of the generators, converters, filters, transformers, and cables should be included in the objective at the same time, because reducing the losses on parts of the devices may increase the losses on the other parts.
- The dispatch of reactive power is strongly related to the distribution of the active power. The stronger the wake effect is, the larger the improvement is when using the optimal dispatch strategy.
- The WF losses are lower when is negative, which is because the copper loss on the DFIG is minimal when the stator absorbs a certain amount of inductive reactive power.
- Strategy C4 can give the minimum WF active power loss, but Strategy A4 can be a good choice in WFs with limited computing resources.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Global Wind Energy Council. Global Wind Report—Annual Market Update. 2015. Available online: http://www.gwec.net/publications/global-wind-report-2/ (accessed on 22 June 2017).
- New Record-Breaking Year for Danish Wind Power. Available online: https://en.energinet.dk/About-our-news/News/2017/04/25/New-record-breaking-year-for-Danish-wind-power (accessed on 22 June 2017).
- Tan, J.; Zhang, Y. Coordinated control strategy of a battery energy storage system to support a wind power plant providing multi-timescale frequency ancillary services. IEEE Trans. Sustain. Energy 2017. [Google Scholar] [CrossRef]
- Technical Regulation 3.2.5 for Wind Power Plants with a Power Output above 11 kW. Available online: https://en.energinet.dk/Electricity/Rules-and-Regulations/Regulations-for-grid-connection (accessed on 22 June 2017).
- National Grid Electricity Transmission plc. The Grid Code—Issue 5, Revision 21. Available online: http://www2.nationalgrid.com/uk/industry-information/electricity-codes/grid-code/the-grid-code/ (accessed on 22 June 2017).
- Zhao, X.; Guerrero, J.M.; Savaghebi, M.; Vasquez, J.C.; Wu, X.; Sun, K. Low-voltage ride-through operation of power converters in grid-interactive microgrids by using negative-sequence droop control. IEEE Trans. Power Electron. 2017, 32, 3128–3142. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Chen, Z.; Blaabjerg, F. Distributed optimal control of reactive power and voltage in islanded microgrids. IEEE Trans. Ind. Appl. 2017, 53, 340–349. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Z.; Wang, X.; Tian, Y.; Tan, Y.; Yang, C. An estimator-based distributed voltage-predictive control strategy for AC islanded microgrids. IEEE Trans. Power Electron. 2015, 30, 3934–3951. [Google Scholar] [CrossRef]
- Rueda-Medina, A.C.; Padilha-Feltrin, A. Distributed generators as providers of reactive power support—A market approach. IEEE Trans. Power Syst. 2013, 28, 490–502. [Google Scholar] [CrossRef]
- Ela, E.; Gevorgian, V.; Fleming, P.; Zhang, Y.C.; Singh, M.; Muljadi, E.; Scholbrook, A.; Aho, J.; Pao, L.; Singhvi, V.; et al. Active Power Controls from Wind Power: Bridging the Gaps; Tech. Report: NREL/TP-5D00-605742013; National Renewable Energy Laboratory: Golden, CO, USA, 2014. [Google Scholar]
- Saraswat, A.; Saini, A.; Saxena, A.K. A novel multi-zone reactive power market settlement model: A pareto-optimization approach. Energy 2013, 51, 85–100. [Google Scholar] [CrossRef]
- Sørensen, P.E.; Hansen, A.D.; Iov, F.; Blaabjerg, F.; Donovan, M.H. Wind Farm Models and Control Strategies; Tech. Report: Risø-R-1464(EN); Risø National Laboratory: Roskilde, Denmark, 2005. [Google Scholar]
- Zhao, B.; Li, H.; Wang, M.; Chen, Y.; Liu, S.; Yang, D.; Yang, C.; Hu, Y.; Chen, Z. An optimal reactive power control strategy for a DFIG-based wind farm to damp the sub-synchronous oscillation of a power system. Energies 2014, 7, 3086–3103. [Google Scholar] [CrossRef]
- Hou, P.; Hu, W.; Zhang, B.; Soltani, M.; Chen, C.; Chen, Z. Optimised power dispatch strategy for offshore wind farms. IET Renew. Power Gener. 2016, 10, 399–409. [Google Scholar] [CrossRef]
- Morren, J.; deHaan, S.W.H. Ridethrough of wind turbines with doubly-fed induction generator during a voltage dip. IEEE Trans. Energy Convers. 2005, 20, 435–441. [Google Scholar] [CrossRef]
- Rahimi, M.; Parniani, M. Efficient control scheme of wind turbines with doubly fed induction generators for low-voltage ride-through capability enhancement. IET Renew. Power Gener. 2010, 4, 242. [Google Scholar] [CrossRef]
- Pannell, G.; Zahawi, B.; Atkinson, D.J.; Missailidis, P. Evaluation of the performance of a dc-link brake chopper as a DFIG low-voltage fault-ride-through device. IEEE Trans. Energy Convers. 2013, 28, 535–542. [Google Scholar] [CrossRef]
- Wessels, C.; Gebhardt, F.; Fuchs, F.W. Fault ride-through of a DFIG wind turbine using a dynamic voltage restorer during symmetrical and asymmetrical grid faults. IEEE Trans. Power Electron. 2011, 26, 807–815. [Google Scholar] [CrossRef]
- Zhu, R.; Deng, F.; Chen, Z.; Liserre, M. Enhanced control of DFIG wind turbine based on stator flux decay compensation. IEEE Trans. Energy Convers. 2016, 31, 1366–1376. [Google Scholar] [CrossRef]
- Zhu, R.; Chen, Z.; Wu, X.; Deng, F. Virtual damping flux-based LVRT control for DFIG-based wind turbine. IEEE Trans. Energy Convers. 2015, 30, 714–725. [Google Scholar] [CrossRef]
- Xie, D.; Xu, Z.; Yang, L.; Østergaard, J.; Xue, Y.; Wong, K.P. A comprehensive LVRT control strategy for DFIG wind turbines with enhanced reactive power support. IEEE Trans. Power Syst. 2013, 28, 3302–3310. [Google Scholar] [CrossRef]
- Jensen, N.O. A Note on Wind Generator Interaction; Tech. Report: Risø-M-2411; Risø National Laboratory: Roskilde, Denmark, 1983. [Google Scholar]
- Martinez-Rojas, M.; Sumper, A.; Gomis-Bellmunt, O.; Sudrià-Andreu, A. Reactive power dispatch in wind farms using particle swarm optimization technique and feasible solutions search. Appl. Energy 2011, 88, 4678–4686. [Google Scholar] [CrossRef]
- Krajangpan, K.; Sadara, W.; Neammanee, B. Control strategies for maximum active power and minimum copper loss of doubly fed induction generator in wind turbine system. In Proceedings of the 2010 International Conference on Power System Technology, Hangzhou, China, 24–28 October 2010; pp. 1–7. [Google Scholar]
- Zhang, B.; Hou, P.; Hu, W.; Soltani, M.; Chen, C.; Chen, Z. A reactive power dispatch strategy with loss minimization for a DFIG-based wind farm. IEEE Trans. Sustain. Energy 2016, 7, 914–923. [Google Scholar] [CrossRef]
- Ullah, N.R.; Bhattacharya, K.; Thiringer, T. Wind farms as reactive power ancillary service providers-technical and economic issues. IEEE Trans. Energy Convers. 2009, 24, 661–672. [Google Scholar] [CrossRef]
- Petersson, A. Analysis, Modeling and Control of Doubly-Fed Induction Generators for Wind Turbines. Ph.D. Thesis, Chalmers University of Technology, Göteborg, Sweden, 2005. [Google Scholar]
- Siemens Power Engineering Guide: Transformer. Available online: http://www.energy.siemens.com/hq/pool/hq/power-transmission/Transformers/downloads/peg-kapitel-5.pdf (accessed on 31 October 2016).
- Saadat, H. Power System Analysis; WCB/McGraw-Hill: Boston, MA, USA, 1999. [Google Scholar]
- Kayk, M.; Milanovi, J.V. Reactive power control strategies for DFIG-based plants. IEEE Trans. Energy Convers. 2007, 22, 389–396. [Google Scholar] [CrossRef]
- Zhou, D.; Blaabjerg, F.; Lau, M.; Tonnes, M. Thermal behavior optimization in multi-MW wind power converter by reactive power circulation. IEEE Trans. Ind. Appl. 2014, 50, 433–440. [Google Scholar] [CrossRef]
- Pena, R.; Clare, J.C.; Asher, G.M. Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation. IEE Proc. Electr. Power Appl. 1996, 143, 231–241. [Google Scholar] [CrossRef]
- Tang, Y.; Xu, L. A flexible active and reactive power control strategy for a variable speed constant frequency generating system. IEEE Trans. Power Electron. 1995, 10, 472–478. [Google Scholar] [CrossRef]
- Abo-Khalil, A.G.; Park, H.-G.; Lee, D.-C. Loss minimization control for doubly-fed induction generators in variable speed wind turbines. In Proceedings of the 33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 1109–1114. [Google Scholar]
- Rabelo, B.; Hofmann, W. Control of an optimized power flow in wind power plants with doubly-fed induction generators. In Proceedings of the IEEE 34th Annual Power Electronics Specialist Conference, Acapulco, Mexico, 15–19 June; pp. 1563–1568.
- Rabelo, B.; Hofmann, W.; Pinheiro, L. Loss reduction methods for doubly-fed induction generator drives for wind turbines. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Taormina, Italy, 23–26 May 2006; pp. 1217–1222. [Google Scholar]
- Zhang, B.; Hu, W.; Chen, Z. Loss minimizing operation of doubly fed induction generator based wind generation systems considering reactive power provision. In Proceedings of the 40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 2146–2152. [Google Scholar]
- Tapia, A.; Tapia, G.; Ostolaza, J.X. Reactive power control of wind farms for voltage control applications. Renew. Energy 2004, 29, 377–392. [Google Scholar] [CrossRef]
- Saenz, J.R.; Tapia, A.; Tapia, G.; Jurado, F.; Ostolaza, X.; Zubia, I. Reactive power control of a wind farm through different control algorithms. In Proceedings of the 4th IEEE International Conference on Power Electronics and Drive Systems, Denpasar, Indonesia, 25–25 October 2001; pp. 203–207. [Google Scholar]
- Tapia, A.; Tapia, G.; Ostolaza, J.X.; Saenz, J.R.; Criado, R.; Berasategui, J.L. Reactive power control of a wind farm made up with doubly fed induction generators II. In Proceedings of the 2001 IEEE Porto Power Tech Proceedings, Porto, Portugal, 10–13 September 2001; pp. 5–9. [Google Scholar]
- Merahi, F.; Berkouk, E.M.; Mekhilef, S. New management structure of active and reactive power of a large wind farm based on multilevel converter. Renew. Energy 2014, 8, 814–828. [Google Scholar] [CrossRef]
- Ghennam, T.; Aliouane, K.; Akel, F.; Francois, B.; Berkouk, E.M. Advanced control system of DFIG based wind generators for reactive power production and integration in a wind farm dispatching. Energy Convers. Manag. 2015, 105, 240–250. [Google Scholar] [CrossRef]
- De Almeida, R.G.; Castronuovo, E.D.; PecasLopes, J.A. Optimum generation control in wind parks when carrying out system operator requests. IEEE Trans. Power Syst. 2006, 21, 718–725. [Google Scholar] [CrossRef]
- Kanna, B.; Singh, S.N. Towards reactive power dispatch within a wind farm using hybrid PSO. Int. J. Electr. Power Energy Syst. 2015, 69, 232–240. [Google Scholar] [CrossRef]
- Zhao, J.; Li, X.; Hao, J.; Lu, J. Reactive power control of wind farm made up with doubly fed induction generators in distribution system. Electr. Power Syst. Res. 2010, 80, 698–706. [Google Scholar] [CrossRef]
- Moyano, C.F.; Peças Lopes, J.A. An optimization approach for wind turbine commitment and dispatch in a wind park. Electr. Power Syst. Res. 2009, 79, 71–79. [Google Scholar] [CrossRef]
- Zhang, B.; Hu, W.; Hou, P.; Chen, Z. Reactive power dispatch for loss minimization of a doubly fed induction generator based wind farm. In Proceedings of the 17th International Conference on Electrical Machines and Systems, Hangzhou, China, 22–25 October 2014; pp. 1373–1378. [Google Scholar]
- Zhang, J.H.; Liu, Y.Q.; Tian, D.; Yan, J. Optimal power dispatch in wind farm based on reduced blade damage and generator losses. Renew. Sustain. Energy Rev. 2015, 44, 64–77. [Google Scholar] [CrossRef]
- Suganthan, P.N. Particle swarm optimiser with neighbourhood operator. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99, Washington, DC, USA, 6–9 July 1999; pp. 1958–1962. [Google Scholar]
- Clerc, M.; Kennedy, J. The particle swarm—Explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| WF Level Dispatch | WT Level Control | Combined Strategy |
|---|---|---|
| Strategy A | Strategy 1 | Strategy A1 [38,39,40,41] |
| Strategy 2 | Strategy A2 [42] | |
| Strategy 3 | Strategy A3 | |
| Strategy 4 | Strategy A4 | |
| Strategy B | Strategy 1 | Strategy B1 [43,44,45,46] |
| Strategy 2 | Strategy B2 | |
| Strategy 3 | Strategy B3 [48] | |
| Strategy 4 | Strategy B4 | |
| Strategy C | Strategy 1 | Strategy C1 [47] |
| Strategy 2 | Strategy C2 | |
| Strategy 3 | Strategy C3 | |
| Strategy 4 | Strategy C4 [25] |
| (pu) | −0.33 | −0.3 | −0.2 | −0.1 | 0 | 0.1 | 0.2 | 0.3 | 0.33 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Loss (kW) | ||||||||||
| A4 | Turbine | 2317 | 2236 | 2028 | 1927 | 1935 | 2050 | 2266 | 2570 | 2677 |
| Transformer | 718 | 708 | 679 | 662 | 656 | 661 | 677 | 704 | 714 | |
| Cable | 671 | 635 | 540 | 482 | 460 | 474 | 524 | 608 | 639 | |
| Total | 3706 | 3579 | 3247 | 3071 | 3051 | 3185 | 3467 | 3882 | 4030 | |
| B4 | Turbine | 2373 | 2315 | 2090 | 1962 | 1939 | 2089 | 2318 | 2645 | 2736 |
| Transformer | 725 | 717 | 688 | 666 | 656 | 661 | 683 | 713 | 722 | |
| Cable | 617 | 580 | 506 | 472 | 460 | 471 | 505 | 563 | 592 | |
| Total | 3715 | 3612 | 3284 | 3100 | 3055 | 3221 | 3506 | 3921 | 4050 | |
| C4 | Turbine | 2319 | 2237 | 2029 | 1927 | 1935 | 2051 | 2267 | 2572 | 2679 |
| Transformer | 719 | 709 | 680 | 662 | 656 | 662 | 678 | 705 | 715 | |
| Cable | 637 | 611 | 533 | 481 | 460 | 473 | 520 | 585 | 612 | |
| Total | 3676 | 3557 | 3241 | 3070 | 3051 | 3186 | 3464 | 3862 | 4006 |
| Strategy | Computing Time for Offline Calculation Using Parallel Computing | Computing Time for Online Implementation |
|---|---|---|
| A1 | - | 0.3 s |
| A2 | - | 0.3 s |
| A3 | - | 0.36 s |
| A4 | - | 0.55 s |
| B1 | 847 s | 0.1 s |
| B2 | 836 s | 0.1 s |
| B3 | 867 s | 0.1 s |
| B4 | 1761 s | 0.1 s |
| C1 | 892 s | 0.1 s |
| C2 | 931 s | 0.1 s |
| C3 | 897 s | 0.1 s |
| C4 | 2011 s | 0.1 s |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Hu, W.; Hou, P.; Tan, J.; Soltani, M.; Chen, Z. Review of Reactive Power Dispatch Strategies for Loss Minimization in a DFIG-based Wind Farm. Energies 2017, 10, 856. https://doi.org/10.3390/en10070856
Zhang B, Hu W, Hou P, Tan J, Soltani M, Chen Z. Review of Reactive Power Dispatch Strategies for Loss Minimization in a DFIG-based Wind Farm. Energies. 2017; 10(7):856. https://doi.org/10.3390/en10070856
Chicago/Turabian StyleZhang, Baohua, Weihao Hu, Peng Hou, Jin Tan, Mohsen Soltani, and Zhe Chen. 2017. "Review of Reactive Power Dispatch Strategies for Loss Minimization in a DFIG-based Wind Farm" Energies 10, no. 7: 856. https://doi.org/10.3390/en10070856
APA StyleZhang, B., Hu, W., Hou, P., Tan, J., Soltani, M., & Chen, Z. (2017). Review of Reactive Power Dispatch Strategies for Loss Minimization in a DFIG-based Wind Farm. Energies, 10(7), 856. https://doi.org/10.3390/en10070856