Nonlinear Synergetic Governor Controllers for Steam Turbine Generators to Enhance Power System Stability



Abstract
:1. Introduction
2. Synergetic Control Theory
3. Design of Nonlinear Synergetic Governor Controller for Steam Turbine Generators
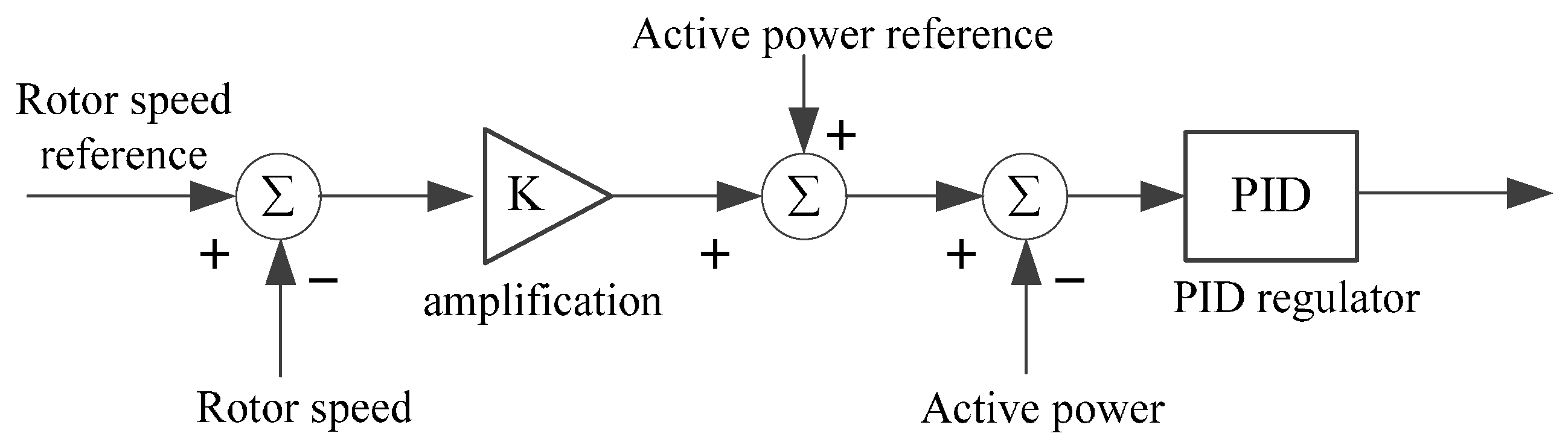
3.1. Mathematical Model of the Turbine Speed Governor System
3.2. Design of the NSGC for a Single-Machine Infinite-Bus Power System
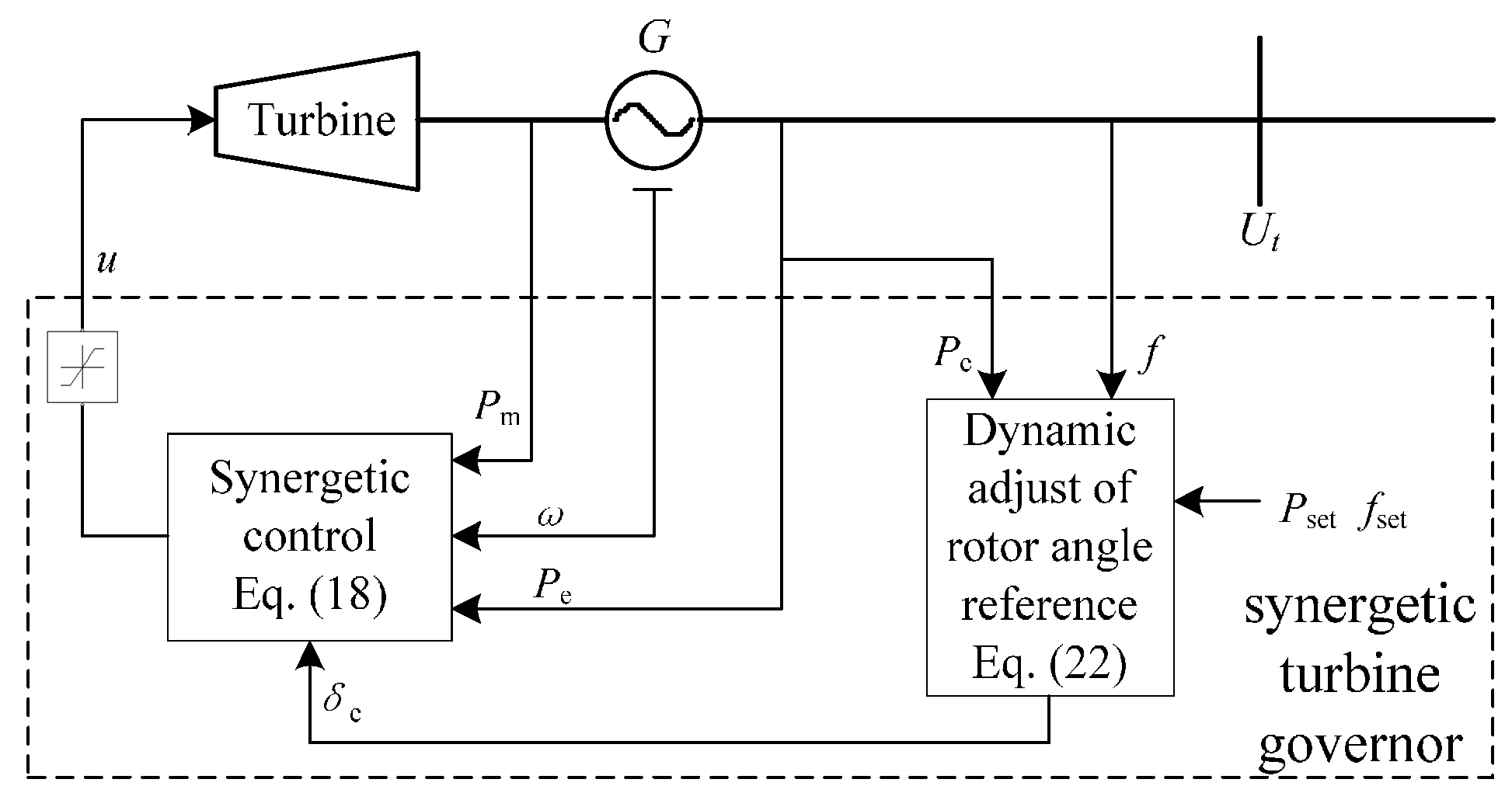
3.3. Design of the Synergetic Turbine Governor for a Multi-Machine Power System
4. Case Studies
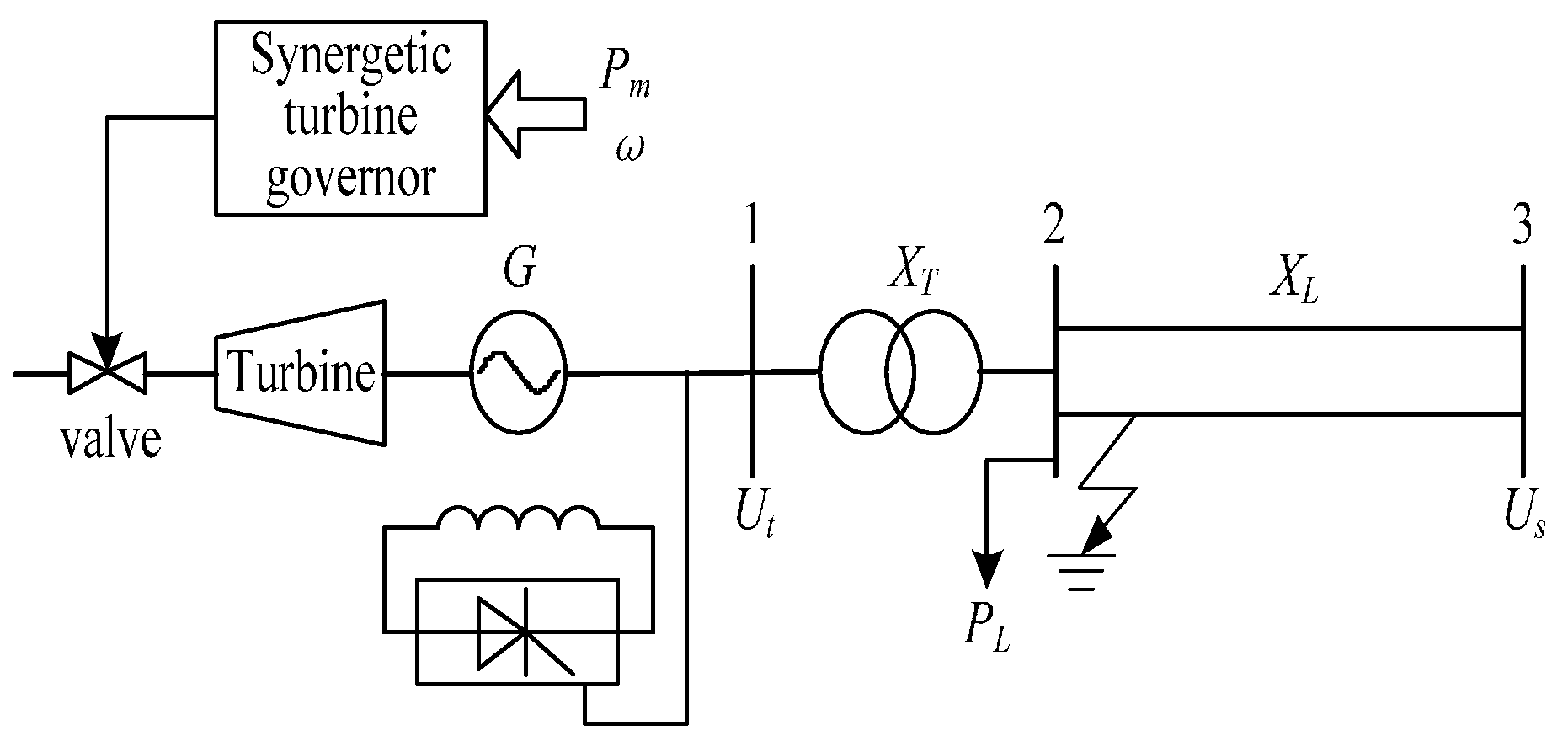
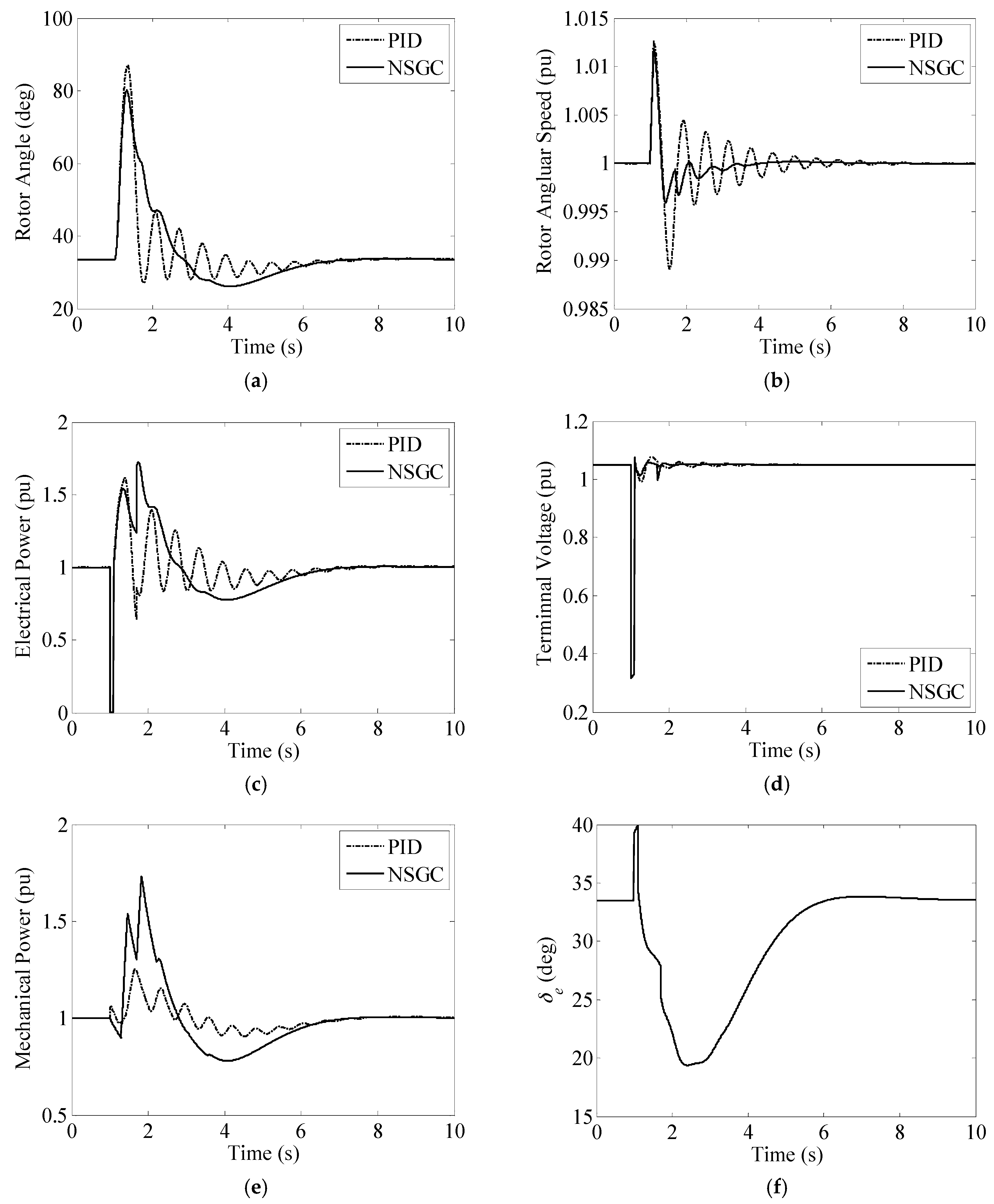
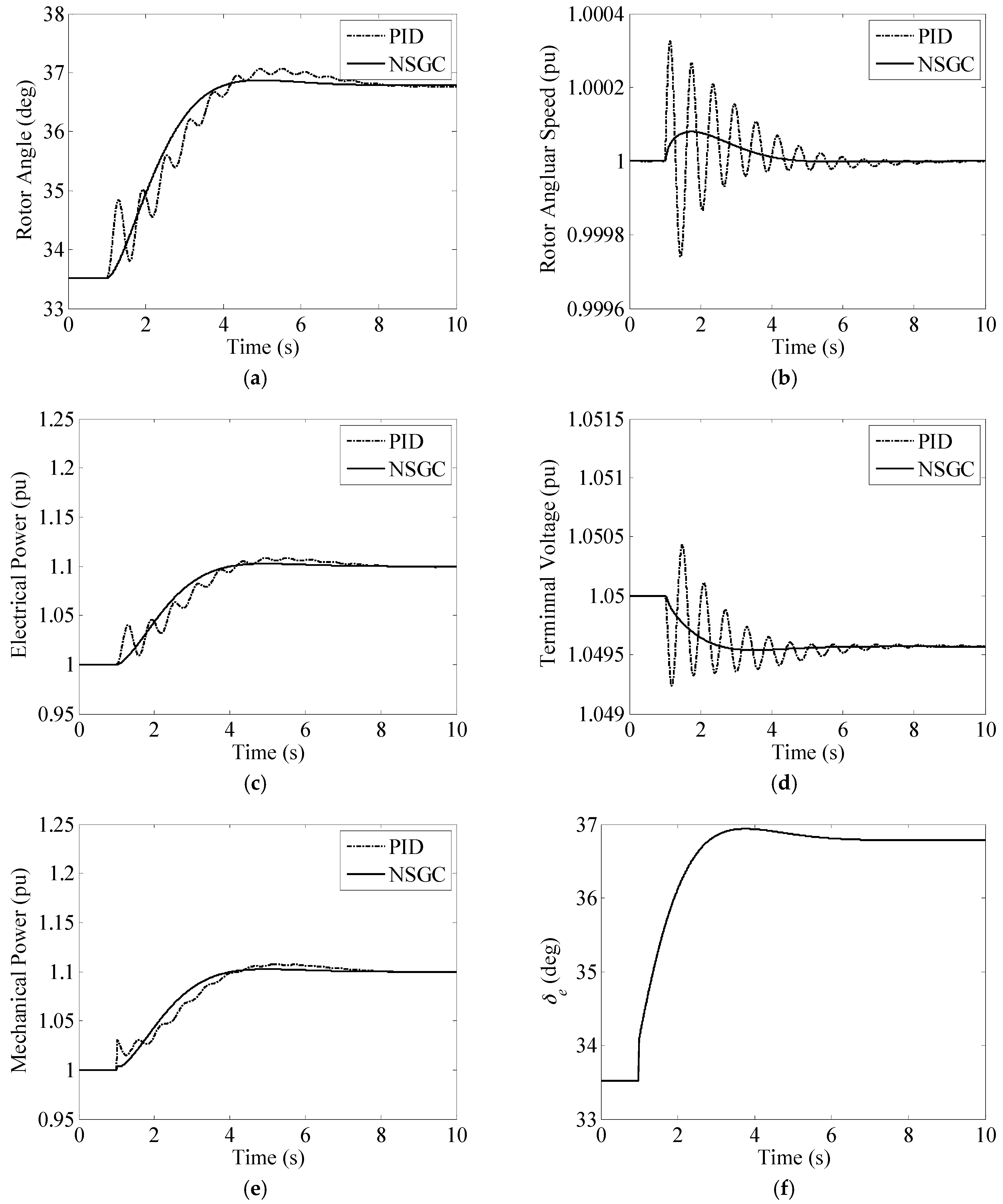
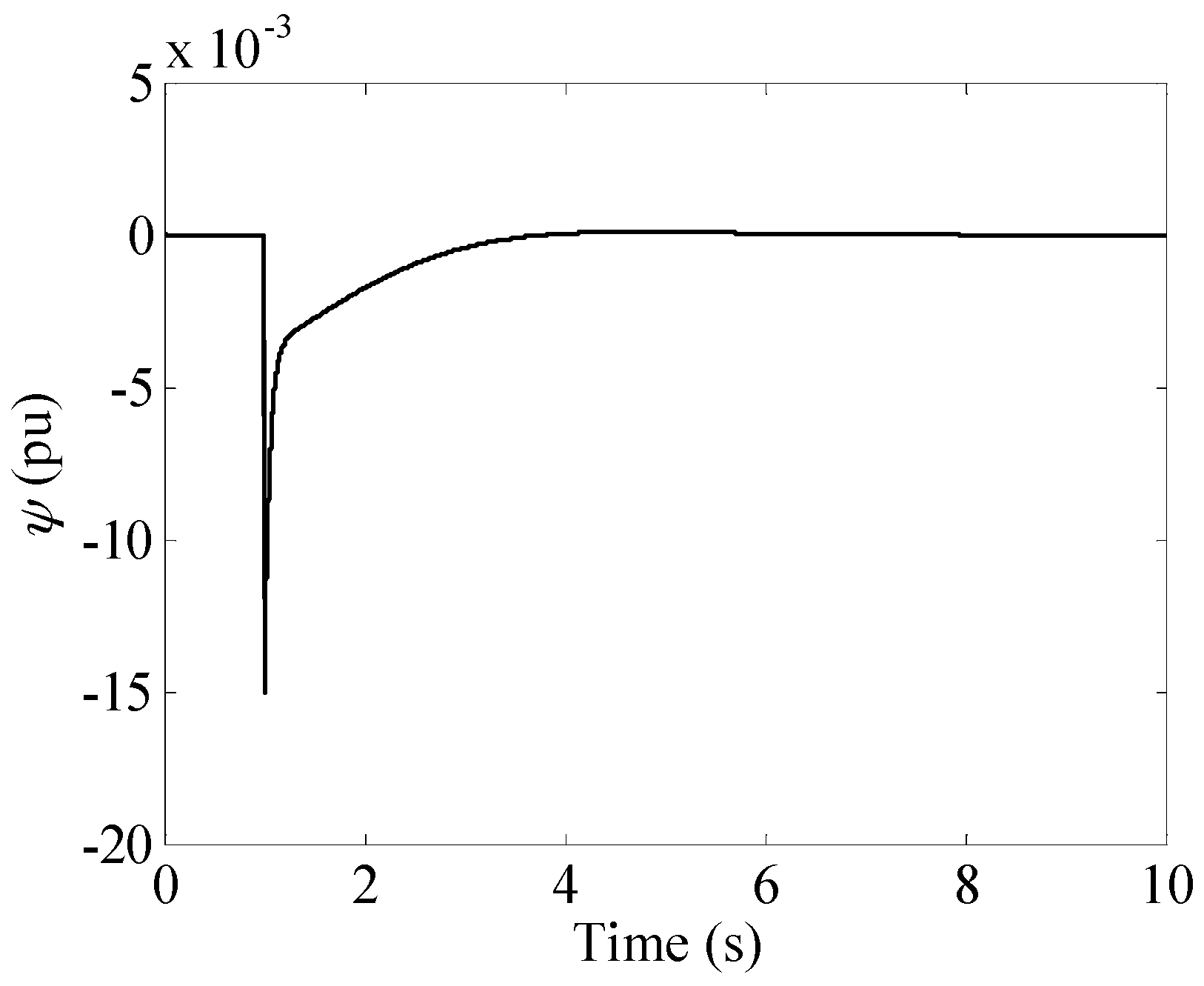
4.1. Single-Machine Infinite-Bus Power System
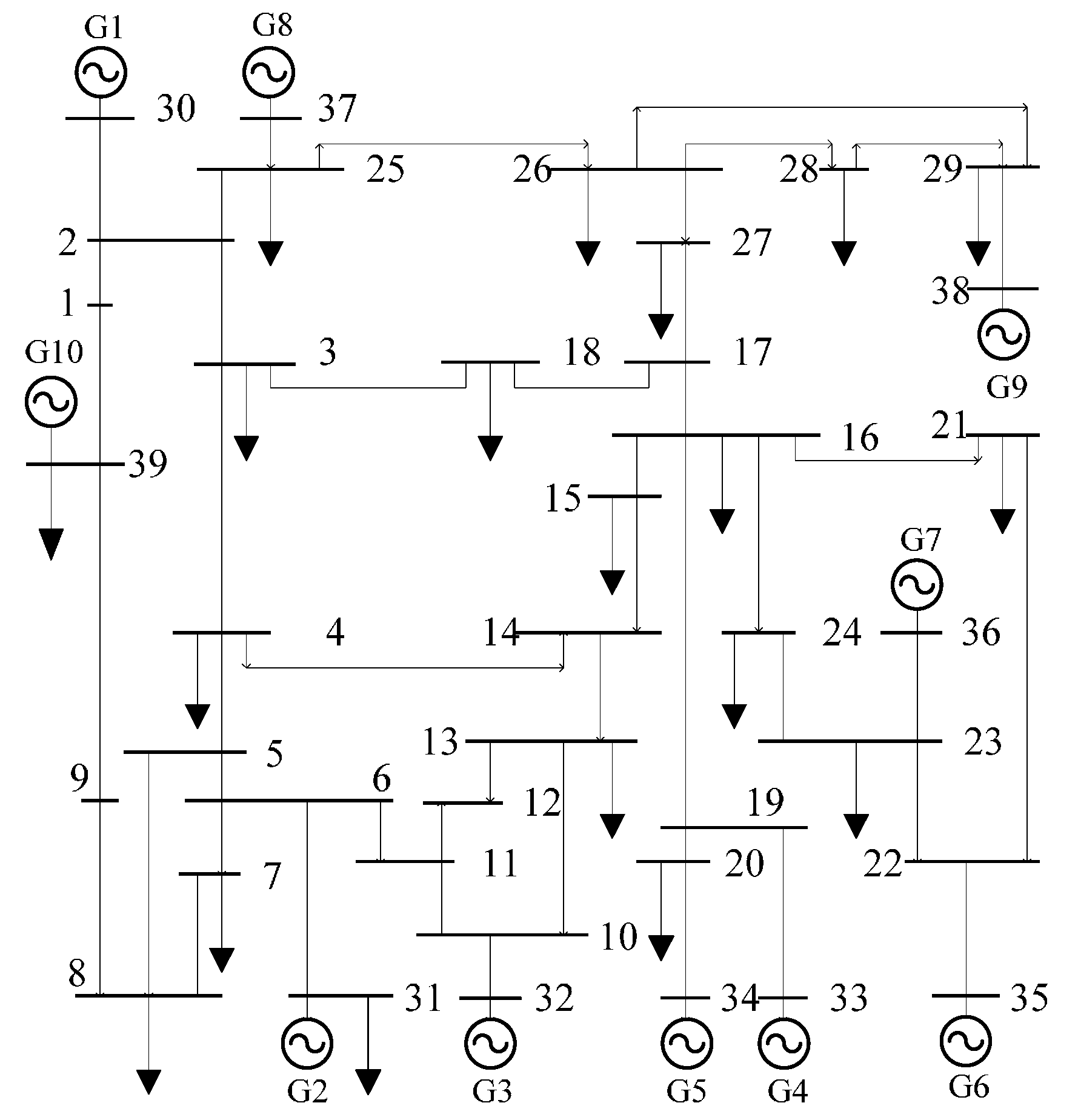
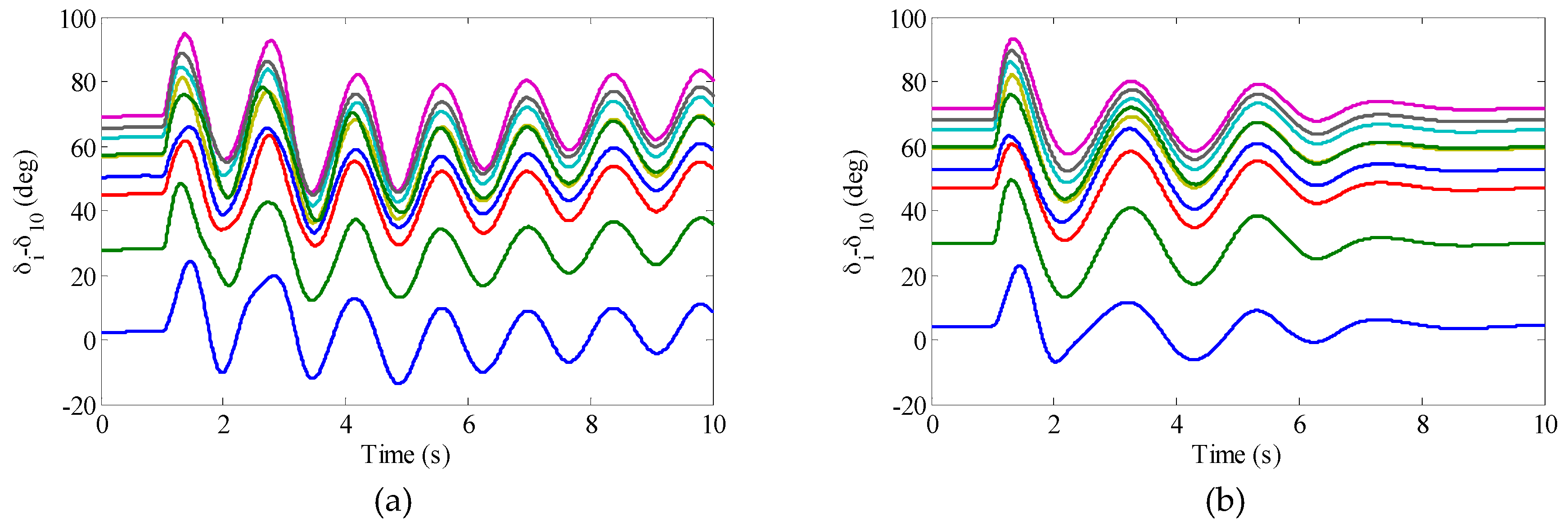
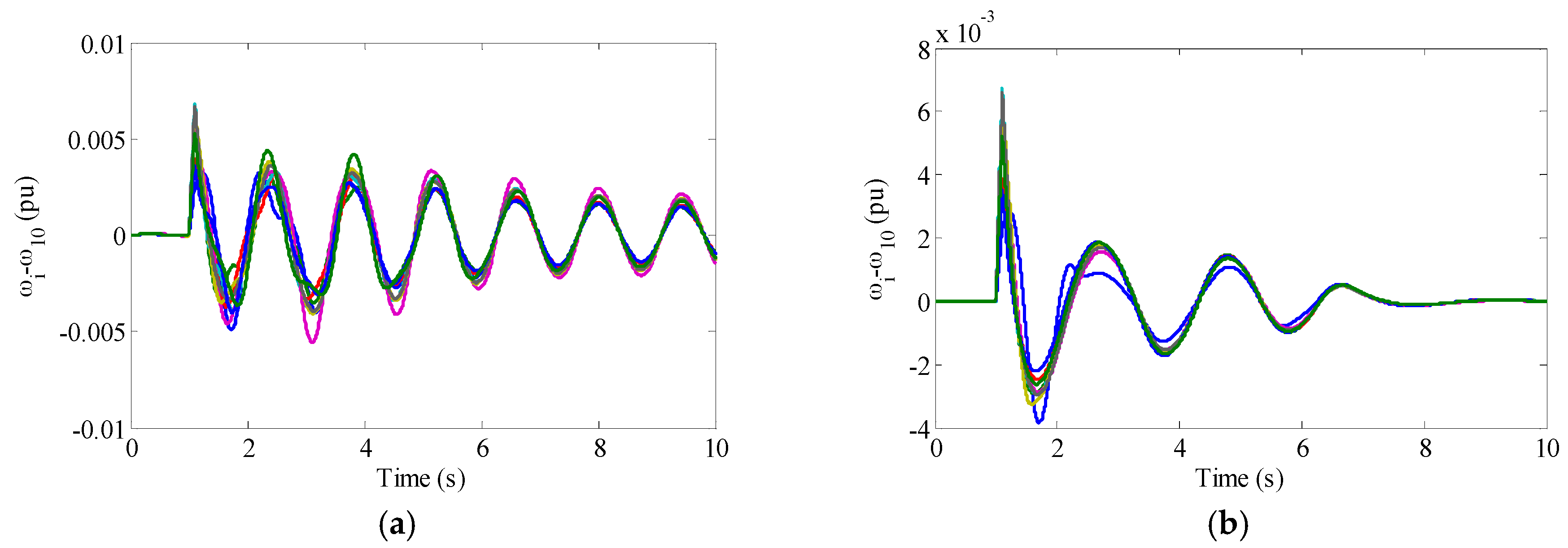
4.2. New England System
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bai, F.; Liu, Y.; Liu, Y.; Sun, K.; Bhatt, N.; Rosso, A.D.; Farantatos, E.; Wang, X. A measurement-based approach for power system instability early warning. Prot. Control Mod. Power Syst. 2016, 1, 1–9. [Google Scholar] [CrossRef]
- Chen, J.; Jiang, L.; Yao, W.; Wu, Q.H. Perturbation estimation based nonlinear adaptive control of a full rate converter wind-turbine for fault ride-through capability enhancement. IEEE Trans. Power Syst. 2014, 29, 2733–2743. [Google Scholar] [CrossRef]
- Yang, B.; Jiang, L.; Wang, L.; Yao, W.; Wu, Q.H. Nonlinear maximum power point tracking control and modal analysis of DFIG based wind turbine. Int. J. Electr. Power Energy Syst. 2016, 74, 429–436. [Google Scholar] [CrossRef]
- Liu, J.; Wen, J.Y.; Yao, W.; Long, Y. Solution to short-term frequency response of wind farms by using energy storage systems. IET Renew. Power Gener. 2016, 10, 669–678. [Google Scholar] [CrossRef]
- Ma, Z.; Chen, H.; Chai, Y.L. Analysis of voltage stability uncertainty using stochastic response surface method related to wind farm correlation. Prot. Control Mod. Power Syst. 2017, 2, 20. [Google Scholar] [CrossRef]
- Liao, S.W.; Yao, W.; Han, X.N.; Wen, J.Y.; Cheng, S.J. Chronological operation simulation framework for regional power system under high penetration of renewable energy using meteorological data. Appl. Energy 2017, 203, 816–828. [Google Scholar] [CrossRef]
- Zhao, J.Q.; Zhang, Y.J.; Zhang, P.; Jin, X.M.; Fu, C. Development of a WAMS based test platform for power system real time transient stability detection and control. Prot. Control Mod. Power Syst. 2016, 1, 1–6. [Google Scholar] [CrossRef]
- Demello, F.P.; Concordia, C. Concepts of synchronous machine stability as affected by excitation control. IEEE Trans. Power Appar. Syst. 1969, 88, 316–329. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Wen, J.Y.; Wu, Q.; Cheng, S.J. Wide-area damping controller for power system interarea oscillations: A networked predictive control approach. IEEE Trans. Control Syst. Technol. 2015, 23, 27–36. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Fang, J.; Wen, J.Y.; Cheng, S.J. Decentralized nonlinear optimal predictive excitation control for multi-machine power systems. Int. J. Electr. Power Energy Syst. 2014, 55, 620–627. [Google Scholar] [CrossRef]
- Liu, C.; Cai, G.W.; Gao, J.W.; Yang, D.Y. Design of nonlinear robust damping controller for power oscillations suppressing based on backstepping-fractional order sliding mode. Energies 2017, 10, 676. [Google Scholar]
- Liu, Z.Q.; Yao, W.; Wen, J.Y. Enhancement of power system stability using a novel power system stabilizer with large critical gain. Energies 2017, 10, 449. [Google Scholar] [CrossRef]
- Jiang, L.; Yao, W.; Wu, Q.H.; Wen, J.Y.; Cheng, S.J. Delay-dependent stability for load frequency control with constant and time-varying delays. IEEE Trans. Power Syst. 2012, 27, 932–941. [Google Scholar] [CrossRef]
- Wang, H.F.; Hao, Y.S.; Hogg, B.W.; Yang, Y.H. Stabilization of power systems by governor-turbine control. Int. J. Electr. Power Energy Syst. 1993, 15, 351–360. [Google Scholar] [CrossRef]
- Milanovic, J.V. Damping of the low-frequency oscillations of the generator: Dynamic interactions and the effectiveness of the controllers. IEE Proc. Gener. Transm. Distrib. 2002, 149, 753–760. [Google Scholar] [CrossRef]
- Fuchs, E.F.; Masoum, M.A.S. Power Quality in Power Systems and Electrical Machines, 1st ed.; Academic Press: Cambridge, MA, USA, 2008; p. 638. [Google Scholar]
- Fuller, J.F.; Fuchs, E.F.; Roesler, D.J. Influence of harmonics on power system distribution protection. IEEE Trans. Power Deliv. 1988, 3, 546–557. [Google Scholar] [CrossRef]
- Caciotta, M.; Giarnetti, S.; Leccese, F.; Leonowicz, Z. Comparison between DFT, adpative window DFT and EDFT for power quality frequency spectrum analysis. In Proceedings of the International Symposium: Modern Electric Power Systems, Wroclaw, Poland, 20–22 September 2010. [Google Scholar]
- Giarnetti, S.; Leccese, F.; Leonowicz, Z. Methods for detection of sub-harmonics in power systems. In Proceedings of the 11th International Scientific Conference Electric Power Engineering, Brno, Czech Republic, 4–6 May 2010; pp. 421–426. [Google Scholar]
- Phi, D.T.; Bourque, E.J.; Thorne, D.H.; Hill, E.F. Analysis and application of the stability limits of a hydro-generating unit. IEEE Trans. Power Appar. Syst. 1981, 7, 3203–3212. [Google Scholar] [CrossRef]
- Thorne, D.H.; Hill, E.F. Field testing and simulation of hydraulic turbine governor performance. IEEE Trans. Power Appar. Syst. 1974, 4, 1183–1191. [Google Scholar] [CrossRef]
- Jiang, J. Design of an optimal robust governor for hydraulic turbine generating units. IEEE Trans. Energy Conv. 1995, 10, 188–194. [Google Scholar] [CrossRef]
- Jiang, H.; Cai, H.; Dorsey, J.F.; Qu, Z. Toward a globally robust decentralized control for large-scale power systems. IEEE Trans. Control Syst. Technol. 1997, 5, 309–319. [Google Scholar] [CrossRef]
- Wu, J.; Yokoyama, A.; Lu, Q.; Goto, M.; Konishi, H. Decentralised nonlinear equilibrium point adaptive control of generators for improving multimachine power system transient stability. IEE Proc. Gener. Transm. Distrib. 2003, 150, 697–708. [Google Scholar] [CrossRef]
- Venayagamoorthy, G.K.; Harley, R.G. Two separate continually online-trained neurocontrollers for excitation and turbine control of a turbogenerator. IEEE Trans. Ind. Appl. 2002, 38, 887–893. [Google Scholar] [CrossRef]
- Venayagamoorthy, G.K.; Harley, R.G.; Wunsch, D.C. Comparison of heuristic dynamic programming and dual heuristic programming adaptive critics for neurocontrol of a turbogenerator. IEEE Trans. Neural Netw. 2002, 13, 764–773. [Google Scholar] [CrossRef] [PubMed]
- Lu, Q.; Sun, Y. Nonlinear stabilizing control of multimachine systems. IEEE Trans. Power Syst. 1989, 4, 236–241. [Google Scholar] [CrossRef]
- Kolesnikov, A.; Veselov, G. Modern Applied Control Theory: Synergetic Approach in Control Theory (in Russian); TSURE Press: Moscow-Taganrog, Russia, 2000. [Google Scholar]
- Santi, E.; Monti, A.; Li, D.; Proddutur, K.; Dougal, R.A. Synergetic control for power electronics applications: A comparison with the sliding mode approach. J. Circuits Syst. Comput. 2004, 13, 737–760. [Google Scholar] [CrossRef]
- Jiang, Z.H.; Dougal, R.A. Synergetic control of power converters for pulse current charging of advanced batteries from a fuel cell power source. IEEE Trans. Power Electron. 2004, 19, 1140–1150. [Google Scholar] [CrossRef]
- Santi, E.; Monti, A.; Li, D.; Proddutur, K.; Dougal, R.A. Synergetic control for DC-DC boost converter: Implementation options. IEEE Trans. Ind. Appl. 2003, 39, 1803–1813. [Google Scholar] [CrossRef]
- de Dieu Nguimfack Ndongmo, J.; Kenné, G.; Nfah, E.M. Design of nonlinear synergetic controller for transient stabilization enhancement of DFIG in multimachine wind power systems. Energy Procedia 2016, 93, 125–132. [Google Scholar] [CrossRef]
- Ademoye, T.; Feliachi, A. Reinforcement learning tuned decentralized synergetic control of power systems. Electr. Power Syst. Res. 2012, 86, 34–40. [Google Scholar] [CrossRef]
- Zhao, P.; Yao, W.; Wang, S.R.; Wen, J.Y.; Cheng, S.J. Decentralized nonlinear synergetic power system stabilizers design for power system stability enhancement. Int. Trans. Electr. Energy Syst. 2014, 24, 1356–1368. [Google Scholar] [CrossRef]
- Bouchama, Z.; Essounbouli, N.; Harmas, M.N.; Hamzaoui, A.; Saoudi, K. Reaching phase free adaptive fuzzy synergetic power system stabilizer. Int. J. Electr. Power Energy Syst. 2016, 77, 43–49. [Google Scholar] [CrossRef]
- Bouchama, Z.; Harmas, M.N. Optimal robust adaptive fuzzy synergetic power system stabilizer design. Electr. Power Syst. Res. 2012, 83, 170–175. [Google Scholar] [CrossRef]
- Nechadi, E.; Harmas, M.N.; Hamzaoui, A.; Essounbouli, N. Type-2 fuzzy based adaptive synergetic power system control. Electr. Power Syst. Res. 2012, 88, 9–15. [Google Scholar] [CrossRef]
- Jiang, Z.H. Design of a nonlinear power system stabilizer using synergetic control theory. Electr. Power Syst. Res. 2009, 79, 855–862. [Google Scholar] [CrossRef]
- Zhao, P.; Yao, W.; Wen, J.Y.; Jiang, L.; Wang, S.R.; Cheng, S.J. Improved synergetic excitation control for transient stability enhancement and voltage regulation of power systems. Int. J. Electr. Power Energy Syst. 2015, 68, 44–51. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Wen, J.Y.; Wu, Q.H.; Cheng, S.J. Wide-area damping controller of FACTS devices for inter-area oscillations considering communication time delays. IEEE Trans. Power Syst. 2014, 29, 318–329. [Google Scholar] [CrossRef]
- Fang, J.K.; Yao, W.; Chen, Z.; Wen, J.Y.; Cheng, S.J. Design of anti-windup compensator for energy storage-based damping controller to enhance power system stability. IEEE Trans. Power Syst. 2014, 29, 1175–1185. [Google Scholar] [CrossRef]
- Shen, Y.; Yao, W.; Wen, J.Y.; He, H.B.; Chen, W.B. Adaptive supplementary damping control of VSC-HVDC for interarea oscillation using GrHDP. IEEE Trans. Power Syst. 2017, in press. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Fang, J.K.; Wen, J.Y.; Cheng, S.J.; Wu, Q.H. Adaptive power oscillation damping controller of superconducting magnetic energy storage device for interarea oscillations in power system. Int. J. Electr. Power Energy Syst. 2016, 78, 555–562. [Google Scholar] [CrossRef]
- Shen, Y.; Yao, W.; Wen, J.Y.; He, H.B. Adaptive wide-area power oscillation damper design for photovoltaic plant considering delay compensation. IET Gener. Transm. Distrib. 2017, in press. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generator No. | Operating Condition 1 (pu) | Operating Condition 2 (pu) |
|---|---|---|
| 1 | 2.5 | 1.7 |
| 2 | 5.73 | 5.798 |
| 3 | 6.5 | 5.7 |
| 4 | 6.32 | 7.32 |
| 5 | 5.08 | 6.08 |
| 6 | 6.5 | 7.5 |
| 7 | 5.6 | 6.6 |
| 8 | 5.4 | 4.6 |
| 9 | 8.3 | 7.5 |
| 10 | 10 | 8.9 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ju, X.; Zhao, P.; Sun, H.; Yao, W.; Wen, J. Nonlinear Synergetic Governor Controllers for Steam Turbine Generators to Enhance Power System Stability. Energies 2017, 10, 1092. https://doi.org/10.3390/en10081092
Ju X, Zhao P, Sun H, Yao W, Wen J. Nonlinear Synergetic Governor Controllers for Steam Turbine Generators to Enhance Power System Stability. Energies. 2017; 10(8):1092. https://doi.org/10.3390/en10081092
Chicago/Turabian StyleJu, Xingbao, Ping Zhao, Haishun Sun, Wei Yao, and Jinyu Wen. 2017. "Nonlinear Synergetic Governor Controllers for Steam Turbine Generators to Enhance Power System Stability" Energies 10, no. 8: 1092. https://doi.org/10.3390/en10081092
APA StyleJu, X., Zhao, P., Sun, H., Yao, W., & Wen, J. (2017). Nonlinear Synergetic Governor Controllers for Steam Turbine Generators to Enhance Power System Stability. Energies, 10(8), 1092. https://doi.org/10.3390/en10081092