Study and Application of Intelligent Sliding Mode Control for Voltage Source Inverters

Abstract
:1. Introduction
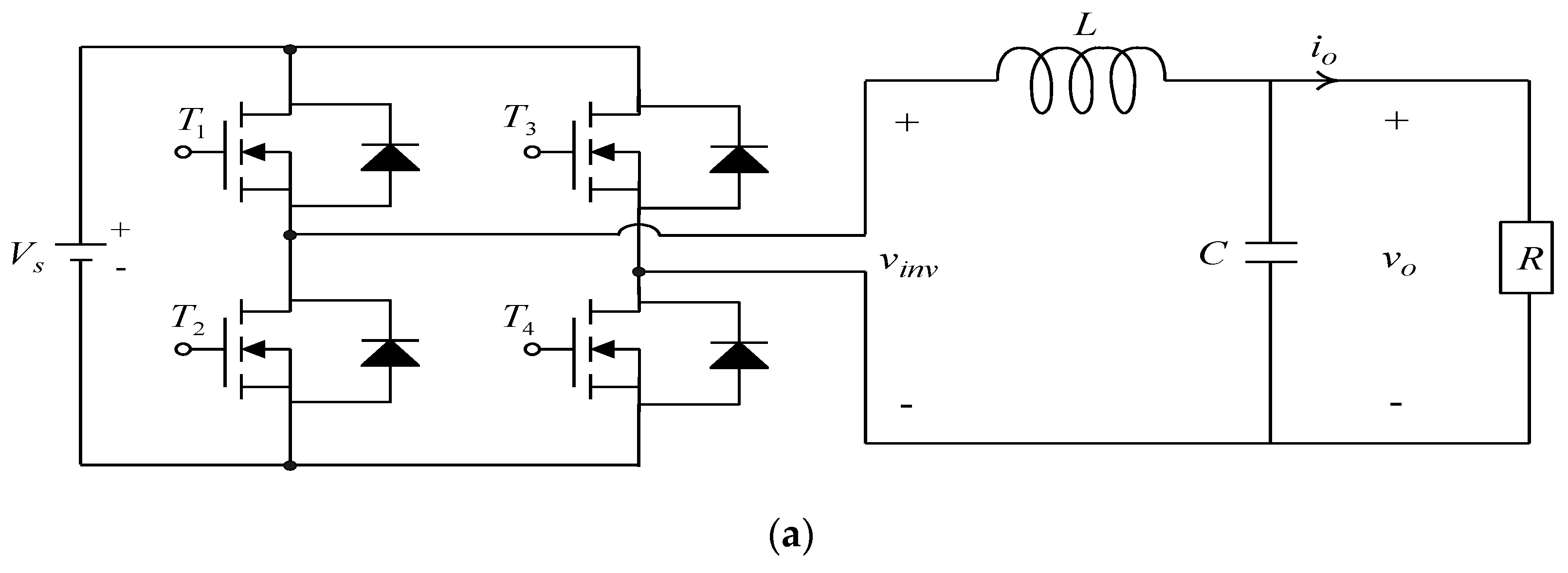
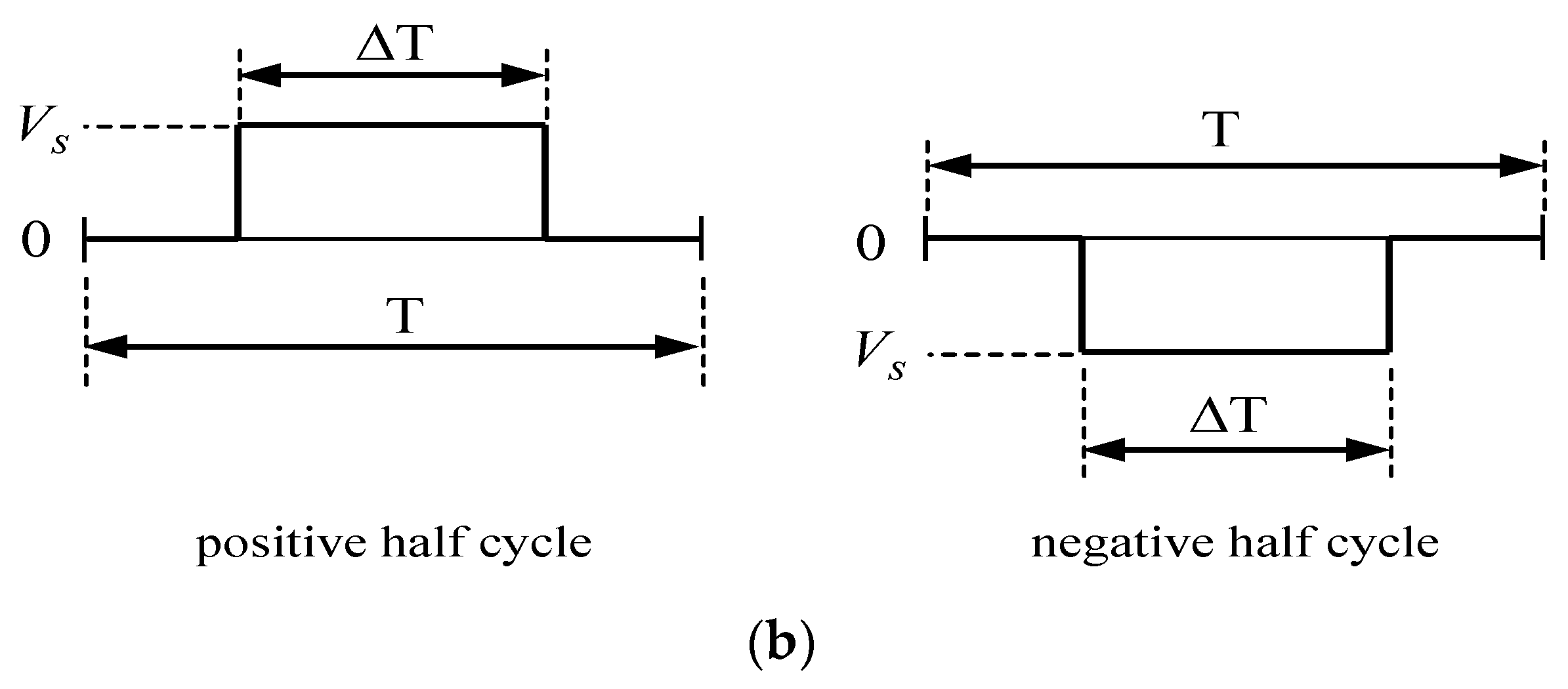
2. Mathematical Representation of VSI
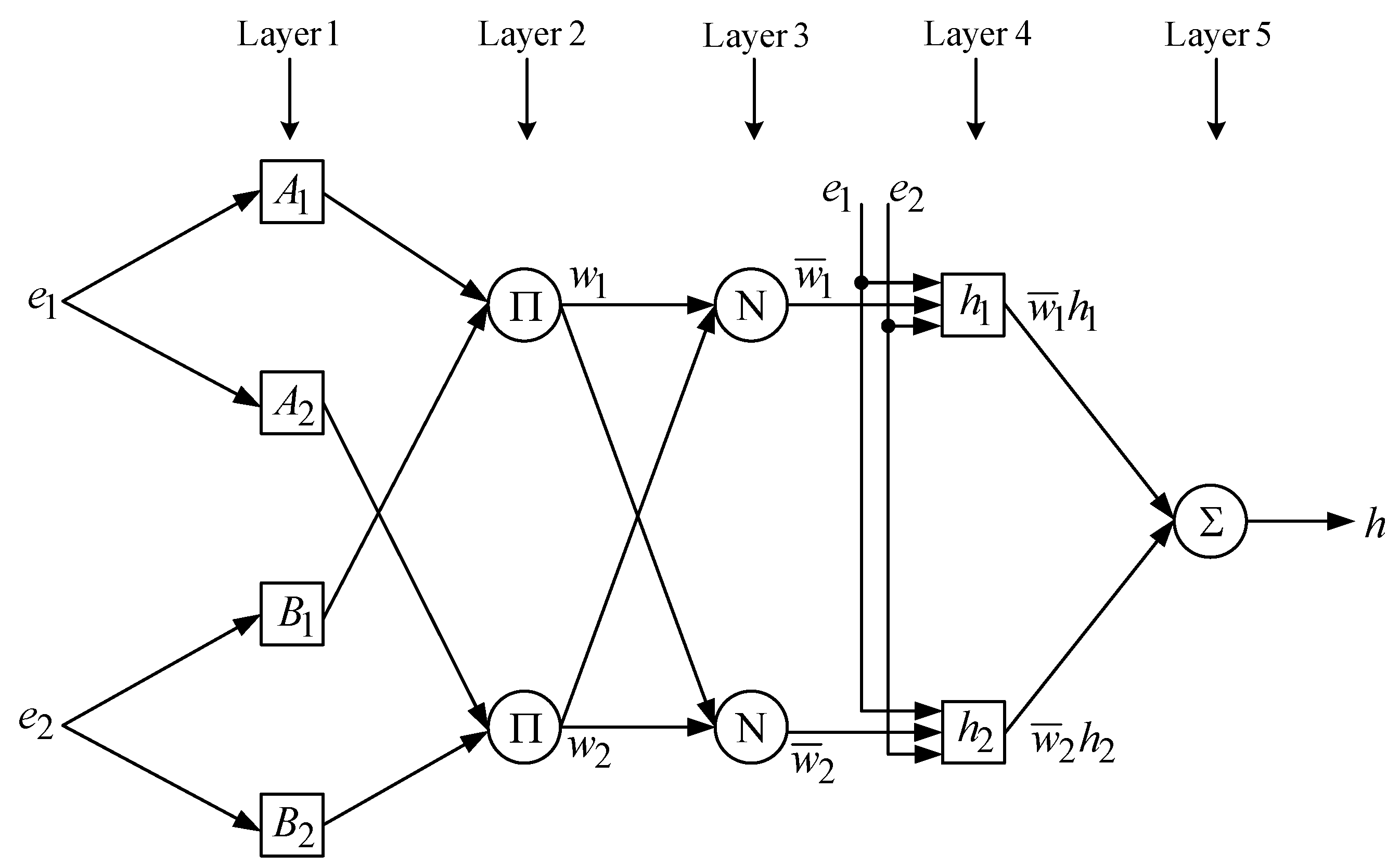
3. Proposed Control Approach of VSI
Problem Statement
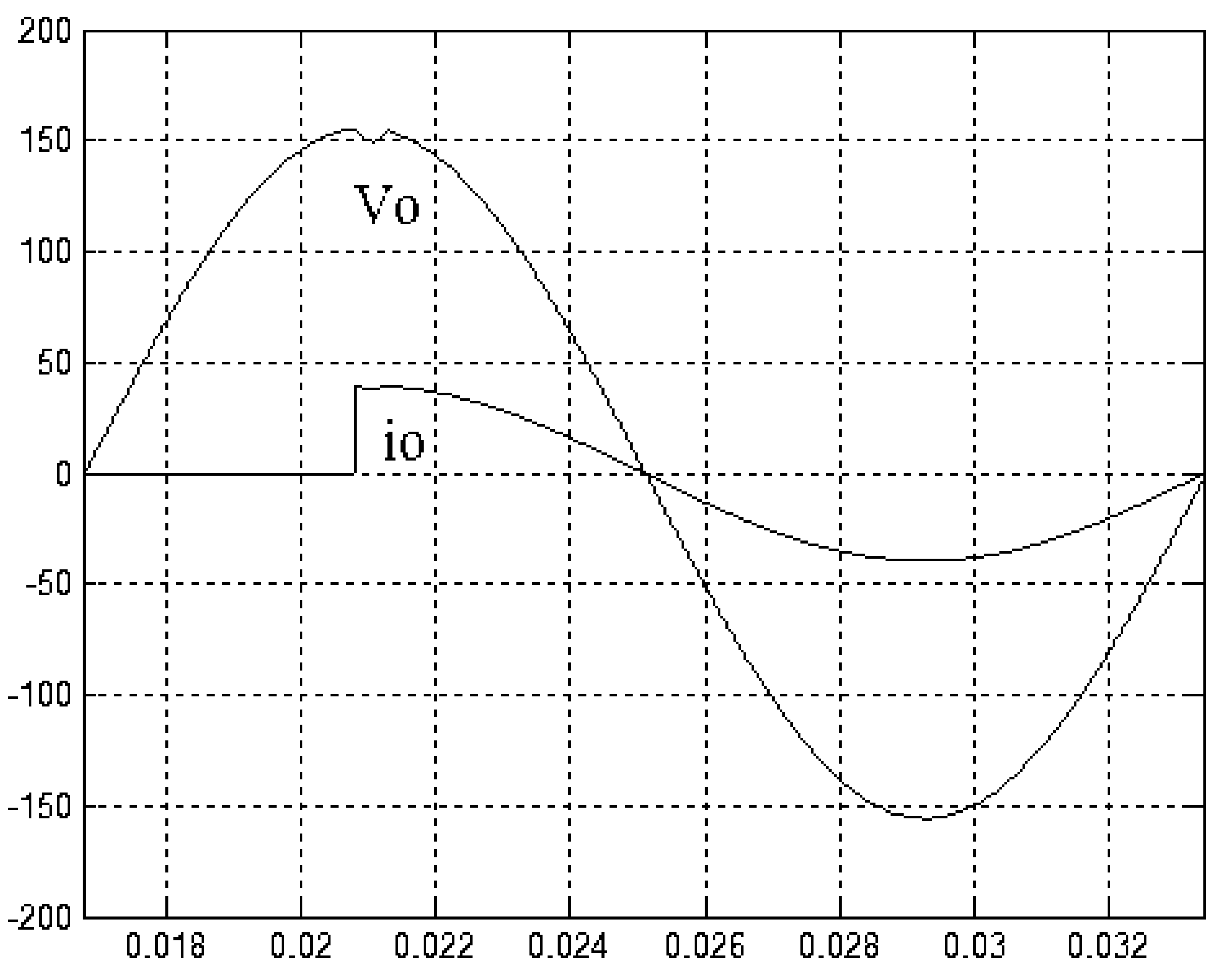
4. Simulation and Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bevrani, H.; Ise, T. Microgrid Dynamics and Control; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Sechilariu, M.; Locment, F. Urban DC Microgrid: Intelligent Control and Power Flow Optimization; Elsevier Science Ltd.: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Mahmoud, M.S. Microgrid: Advanced Control Methods and Renewable Energy System Integration; Elsevier Science Ltd.: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Blaabjerg, F. Control of Power Electronic Converters and Systems; Academic Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Sahoo, S.K. Harmonic Analysis of Voltage Source Inverter Using PWM Techniques: Performance Analysis of Three Phase Voltage Source Inverter Using PWM Techniques; LAP LAMBERT Academic Publishing: Riga, Latvia, 2012. [Google Scholar]
- Chen, C.; Xiong, R.; Shen, W.X. A Lithium-Ion Battery-in-the-Loop Approach to Test and Validate Multiscale Dual H Infinity Filters for State-of-Charge and Capacity Estimation. IEEE Trans. Power Electron. 2018, 33, 332–342. [Google Scholar] [CrossRef]
- He, Y.B.; Chung, S.H.; Ho, N.M.; Wu, W.M. Modified Cascaded Boundary-Deadbeat Control for a Virtually-Grounded Three-Phase Grid-Connected Inverter with LCL Filter. IEEE Trans. Power Electron. 2017, 32, 8163–8180. [Google Scholar] [CrossRef]
- Xie, C.A.; Zhao, X.; Savaghebi, M.; Meng, L.; Guerrero, J.M.; Vasquez, J.C. Multirate Fractional-Order Repetitive Control of Shunt Active Power Filter Suitable for Microgrid Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 809–819. [Google Scholar] [CrossRef]
- Utkin, V.I. Variable Structure Systems with Sliding Modes. IEEE Trans. Autom. Control 1977, AC-22, 212–222. [Google Scholar] [CrossRef]
- Sundarapandian, V.; Lien, C.H. Applications of Sliding Mode Control in Science and Engineering; Springer: Berlin, Germany, 2017. [Google Scholar]
- Nabil, D.; Jawhar, G.; Zhu, Q.M. Applications of Sliding Mode Control; Springer: Berlin, Germany, 2017. [Google Scholar]
- Bagheri, F.; Komurcugil, H.; Kukrer, O. Fixed switching frequency sliding-mode control methodology for single-phase LCL-filtered quasi-Z-source grid-tied inverters. In Proceedings of the 2018 IEEE 12th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG 2018), Doha, Qatar, 10–12 April 2018; pp. 1–6. [Google Scholar]
- Abrishamifar, A.; Ahmad, A.; Mohamadian, M. Fixed Switching Frequency Sliding Mode Control for Single-Phase Unipolar Inverter. IEEE Trans. Power Electron. 2012, 27, 2507–2514. [Google Scholar] [CrossRef]
- Aamir, M.; Kalwar, K.A.; Mekhilef, S. Proportional-Resonant and Slide Mode Control for Single-Phase UPS Inverter. Electr. Power Compon. Syst. 2017, 45, 11–21. [Google Scholar] [CrossRef]
- Hao, X.; Yang, X.; Liu, T.; Huang, L.; Chen, W.J. A Sliding-Mode Controller with Multiresonant Sliding Surface for Single-Phase Grid-Connected VSI with an LCL Filter. IEEE Trans. Power Electron. 2013, 28, 2259–2268. [Google Scholar] [CrossRef]
- Khajeh-Shalaly, B.; Shahgholian, G. A Multi-Slope Sliding-Mode Control Approach for Single-Phase Inverters under Different Loads. Electronics 2016, 5, 68. [Google Scholar] [CrossRef]
- Lachichi, A.; Pierfederici, S.; Martin, J.P.; Davat, B. Study of a Hybrid Fixed Frequency Current Controller Suitable for DC–DC Applications. IEEE Trans. Power Electron. 2008, 23, 1437–1448. [Google Scholar] [CrossRef]
- Zakipour, A.; Shokri-Kojori, S.; Bina, M.T. Closed-loop control of the grid-connected Z-source inverter using hyper-plane MIMO sliding mode. IET Power Electron. 2017, 10, 2229–2241. [Google Scholar] [CrossRef]
- Knight, J.; Shirsavar, S.; Holderbaum, W. An improved reliability Cuk based solar inverter with sliding mode control. IEEE Trans. Power Electron. 2006, 21, 1107–1115. [Google Scholar] [CrossRef]
- Islam, G.; Muyeen, S.M.; Al-Durra, A.; Hasanien, H.M. RTDS implementation of an improved sliding mode based inverter controller for PV system. ISA Trans. 2016, 62, 50–59. [Google Scholar] [CrossRef] [PubMed]
- Montoya, D.G.; Paja, C.A.R.; Giral, R. Improved Design of Sliding-Mode Controllers Based on the Requirements of MPPT Techniques. IEEE Trans. Power Electron. 2016, 31, 235–247. [Google Scholar] [CrossRef]
- Yu, X.H.; Wang, B.; Batbayar, B.; Wang, L.P.; Man, Z.H. An improved training algorithm for feedforward neural network learning based on terminal attractors. J. Glob. Optim. 2011, 51, 271–284. [Google Scholar] [CrossRef]
- Xiong, J.J.; Zhang, G.B. Global fast dynamic terminal sliding mode control for a quadrotor UAV. ISA Trans. 2017, 66, 233–240. [Google Scholar] [CrossRef] [PubMed]
- Mishra, J.; Yu, X.; Jalili, M.; Feng, Y. On fast terminal sliding-mode control design for higher order systems. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 252–257. [Google Scholar]
- Mobayen, S. Fast terminal sliding mode controller design for nonlinear second-order systems with time-varying uncertainties. Complexity 2015, 21, 239–244. [Google Scholar] [CrossRef]
- Veluvolu, K.C.; Defoort, M.; Soh, Y.C. High-gain observer with sliding mode for nonlinear state estimation and fault reconstruction. J. Frankl. Inst. 2014, 351, 1995–2014. [Google Scholar] [CrossRef]
- Guisser, M.; L-Jouni, A.E.; Abdelmounim, E.L.H. Robust Sliding Mode MPPT Controller Based on High Gain Observer of a Photovoltaic Water Pumping System. Int. Rev. Autom. Control 2014, 7, 225–232. [Google Scholar] [CrossRef]
- Vidal-Idiarte, E.; Martinez-Salamero, L.; Gispert, F.G.; Gomariz, S. Sliding and fuzzy control of a boost converter using a 8-bit microcontroller. IEE Proc. Electr. Power Appl. 2004, 151, 5–11. [Google Scholar] [CrossRef]
- Cao, J.B.; Cao, B.G. Fuzzy-Logic-Based Sliding-Mode Controller Design for Position-Sensorless Electric Vehicle. IEEE Trans. Power Electron. 2009, 24, 2368–2378. [Google Scholar] [CrossRef]
- Radu, S.M.; Tudoroiu, E.R.; Kecs, W.; Ilias, N.; Tudoroiu, N. Real Time Implementation of an Improved Hybrid Fuzzy Sliding Mode Observer Estimator. Adv. Sci. Technol. Eng. Syst. J. 2017, 2, 214–226. [Google Scholar] [CrossRef] [Green Version]
- Guzman, R.; Vicuna, L.G.; Morales, J.; Castilla, M.; Miret, J. Model-Based Active Damping Control for Three-Phase Voltage Source Inverters with LCL Filter. IEEE Trans. Power Electron. 2017, 32, 5637–5650. [Google Scholar] [CrossRef] [Green Version]
- Fei, J.T.; Zhu, Y.K. Adaptive fuzzy sliding control of single-phase PV grid-connected inverter. In Proceedings of the IEEE Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; pp. 1233–1238. [Google Scholar]
- Wai, R.J.; Lin, Y.F.; Liu, Y.K. Design of Adaptive Fuzzy-Neural-Network Control for a Single-Stage Boost Inverter. IEEE Trans. Power Electron. 2015, 30, 7282–7298. [Google Scholar] [CrossRef]
- Mohammad, M. Optimal Operation Management of a Typical Microgrid as Grid Connected in Power Systems Using Fuzzy Sliding-Mode Control (FSMC) Approach. World Appl. Sci. J. 2013, 28, 440–448. [Google Scholar]
- Leu, V.Q.; Choi, H.H.; Jung, J.W. Fuzzy Sliding Mode Speed Controller for PM Synchronous Motors with a Load Torque Observer. IEEE Trans. Power Electron. 2012, 27, 1530–1539. [Google Scholar] [CrossRef]
- Jang, J.S.R.; Sun, C.T.; Mizutani, E. Neuro-Fuzzy and Soft Computing: A Computational Approach to Learning and Machine Intelligence; Prentice-Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Vafaei, S.; Rezvani, A.; Gandomkar, M.; Izadbakhsh, M. Enhancement of grid-connected photovoltaic system using ANFIS-GA under different circumstances. Front. Energy 2015, 9, 322–334. [Google Scholar] [CrossRef]
- Abdulwahid, A.H.; Wang, S.R. A Novel Approach for Microgrid Protection Based upon Combined ANFIS and Hilbert Space-Based Power Setting. Energies 2016, 9, 1042. [Google Scholar] [CrossRef]
- Logeswaran, T.; Senthilkumar, A.; Karuppusamy, P. Adaptive neuro-fuzzy model for grid-connected photovoltaic system. Int. J. Fuzzy Syst. 2016, 17, 585–594. [Google Scholar] [CrossRef]
- Garcia, P.; Garcia, C.A.; Fernandez, L.M.; Llorens, F.; Jurado, F. ANFIS-Based Control of a Grid-Connected Hybrid System Integrating Renewable Energies, Hydrogen and Batteries. IEEE Trans. Ind. Inform. 2014, 10, 1107–1117. [Google Scholar] [CrossRef]
- Kabzinski, J. Advanced Control of Electrical Drives and Power Electronic Converters; Springer: Berlin, Germany, 2017. [Google Scholar]
- Mahdavi, J.; Emaadi, A.; Bellar, M.; Ehsani, M. Analysis of power electronic converters using the generalized state-space averaging approach. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1997, 44, 767–770. [Google Scholar] [CrossRef]
- Ang, S.; Oliva, A. Power-Switching Converters; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Noman, A.M.; Addoweesh, K.E.; Alolah, A.I. Simulation and Practical Implementation of ANFIS-Based MPPT Method for PV Applications Using Isolated Ćuk Converter. Int. J. Photoenergy 2017, 2017, 3106734. [Google Scholar] [CrossRef]
- Elagori, A.; Tacer, M. Implementation and Evaluation of Maximum Power Point Tracking (MPPT) Based on Adaptive Neuro-Fuzzy Inference System for Photovoltaic PV System. Int. J. Electron. Mech. Mechatron. Eng. 2017, 7, 1453–1474. [Google Scholar]
- Shabaan, S.; El-Sebah, I.A.; Bekhit, P. Maximum power point tracking for photovoltaic solar pump based on ANFIS tuning system. J. Electr. Syst. Inf. Technol. 2018, 1, 11–22. [Google Scholar] [CrossRef]
- Singh, M.; Chandra, A. Application of Adaptive Network-Based Fuzzy Inference System for Sensorless Control of PMSG-Based Wind Turbine with Nonlinear-Load-Compensation Capabilities. IEEE Trans. Power Electron. 2011, 26, 165–175. [Google Scholar] [CrossRef]
- Cheok, A.D.; Wang, Z.F. Fuzzy logic rotor position estimation based switched reluctance motor DSP drive with accuracy enhancement. IEEE Trans. Power Electron. 2005, 4, 908–921. [Google Scholar] [CrossRef]
- Senjyu, T.; Kashiwagi, T.; Uezato, K. Position control of ultrasonic motors using MRAC and dead-zone compensation with fuzzy inference. IEEE Trans. Power Electron. 2002, 2, 265–272. [Google Scholar] [CrossRef]
- Fotouhi, A.; Auger, D.J.; Propp, K.; Longo, S. Lithium–Sulfur Battery State-of-Charge Observability Analysis and Estimation. IEEE Trans. Power Electron. 2018, 33, 5847–5859. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter Inductor | |
| Filter Capacitor | |
| Resistive Load | |
| DC link Voltage | |
| Output Voltage and Frequency | |
| Switching Frequency |
| Proposed Approach | |
|---|---|
| Step-load changing | Filter parameter variations |
| Voltage drop | %THD |
| 4.6 Vrms | 0.02% |
| Conventional SMC | |
| Step-load changing | Filter parameter variations |
| Voltage drop | %THD |
| 22.9 Vrms | 14.32% |
| Proposed Approach | |
|---|---|
| Step-load changing | Rectifier load |
| Voltage drop | %THD |
| 6.5 Vrms | 1.82% |
| Conventional SMC | |
| Step-load changing | Rectifier load |
| Voltage drop | %THD |
| 24.5 Vrms | 10.21% |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, E.-C. Study and Application of Intelligent Sliding Mode Control for Voltage Source Inverters. Energies 2018, 11, 2544. https://doi.org/10.3390/en11102544
Chang E-C. Study and Application of Intelligent Sliding Mode Control for Voltage Source Inverters. Energies. 2018; 11(10):2544. https://doi.org/10.3390/en11102544
Chicago/Turabian StyleChang, En-Chih. 2018. "Study and Application of Intelligent Sliding Mode Control for Voltage Source Inverters" Energies 11, no. 10: 2544. https://doi.org/10.3390/en11102544
APA StyleChang, E. -C. (2018). Study and Application of Intelligent Sliding Mode Control for Voltage Source Inverters. Energies, 11(10), 2544. https://doi.org/10.3390/en11102544