1. Introduction
In order to exploit and utilize deep Earth energies and resources such as petroleum, water, geothermal, mining, and geo-energy, we need new technologies to extract these energies and resources from deep formations. The key to the exploitation and use of deep earth energies and resources is constructing a high-quality underground passage, often achieved via drilling a hole in the petroleum industry. A variety of aspects are involved in drilling, such as how to improve drilling efficiency and control the borehole trajectory as desired. Fully rotary drilling addresses both of these issues.
In oil and gas drilling engineering, fully rotary drilling refers to the combined movements of the rotary table and down-hole motor [
1]. Industrial down-hole motors can be classified into two categories: the positive displacement motor (PDM), and the turbo-drill. Of the two, the PDM is the most common and the most widely used down-hole motor [
2]. Due to the popularization and application of polycrystalline diamond compact (PDC) bits, drilling combining the PDM tool and PDC bit was employed to improve drill efficiency. In general, there are two kinds of drilling modes: sliding drilling, and rotary drilling. Sliding drilling is mainly used to control the well trajectory, so it can be used for drilling in the build-up section, drop-off section, and azimuth adjustment section. Rotary drilling, a kind of fully rotary drilling method, is mainly utilized to improve drill efficiency by reducing excessive drag of the drill-string, improving borehole cleaning, improving the control of the weight-on-bit (WOB), and increasing the rate of penetration (ROP); thus, it can be used for drilling in the vertical section, hold-on section, and horizontal section. Currently, drilling that combines the PDM tool and PDC bit is still the main method used to drill a directional well [
1,
2]. In addition, fully rotary drilling can also be employed in speedup activities of deep wells.
A large number of field applications have demonstrated that BHA with bent-housing PDM tool can increase the ROP, shorten nonproductive time (NPT), shorten drilling cycle, and reduce drilling costs [
3,
4,
5,
6]. However, the applications of fully rotary drilling using bent-housing PDM tool has created some new challenges [
6,
7]. Firstly, the bent-housing PDM tool has to bear alternating loads during rotary drilling, due to the special structure of the bent-housing PDM tool. Consequently, the PDM tool is prone to failure, causing downhole accidents, and thereby increasing the risk of drilling operation. Secondly, during the process of directional drilling, slide drilling and rotary drilling have to be frequently switched to control the well trajectory and to overcome the excessive drag of drill-string. “Small steps”, which affect the tortuosity of the wellbore, are easily formed, resulting in the decrease of the borehole quality. Thirdly, the impact of drill-string rotation on the mechanical behavior and steering ability of BHA with bent-housing PDM is not well understood. In fact, the mechanical model of BHA is no longer static or quasi-static but should be dynamic. Thus, the dynamic behavior and dynamic steering ability should be investigated to precisely control the well trajectory. Lastly, the impact of bit-formation interaction and drill0string-wellbore interaction on the mechanical behavior and steering ability of BHA with bent-housing PDM is not clear. In fact, the mechanical behavior and steering ability of BHA is affected by bit-formation interaction, and its influence should be involved.
The above problems are related to the mechanical behavior and steering ability of BHA with bent-housing PDM under rotary drilling. In order to achieve fast, accurate, and economical control of the wellbore trajectories in oil and gas wells, the mechanical behavior and steering ability of the BHA are key. Many scholars have therefore conducted studies on the mechanical behavior and steering ability of the BHA. Since the first mechanical model of the BHA was proposed by Lubinski and Woods [
8], the development of the BHA mechanical model has advanced from an analytical to a numerical model, from a two-dimensional (2D) to a three-dimensional (3D) model, and from a static to a dynamic model [
1]. Some related books introduced the systematic models and methods for the BHA, such as
Developments in Petroleum Engineering (Volume I) [
9],
Developments in Petroleum Engineering (Volume II) [
10], and
Deviation Control Theory and Practice [
11]. These books discuss the factors influencing the inclination angle and doglegs in rotary drilling holes, and how to control the inclination and BHA performance prediction [
12]. However, most of them mainly investigated static or quasi-static mechanical behavior and the steering ability of conventional multi-stabilizer BHA and conventional BHA with a PDM tool [
1]. Regarding the dynamic behavior and steering ability of BHA with bent-housing PDM, Dykstra [
13] investigated the dynamic behavior of BHA by using the dynamic model of a rotor. The dynamic model of BHA was proposed on the basis of the Hamilton principle. Liu et al. [
14] introduced an arc bent beam unit and dynamic gap element. The arc bent beam units and rigidity matrix were suited to the deformation analysis of a drill-string, and steering of the drill bit was achieved. Di and colleagues [
15,
16] proposed a quasi-static mechanical model of BHA with a rotary steering tool. The results indicated that the movement of the drill bit has similar rules in each circle of the rotary table, and the overall orientation effect could be represented by the resultant steering vector on bit within a circle of drill-string rotation. Zhou et al. [
17] applied the quasi-static mechanical model of BHA with rotary steering tool. Di and colleagues [
18,
19] proposed a dynamic model of BHA used in pre-bending dynamic vertical and fast drilling technology. The results indicated that the trace, speed, and direction of the whirl motion of BHA can be accurately reflected, the dynamic anti-deviation force of BHA can be approximately calculated, and the dynamic impact force of the bit acting on the low side of the wellbore is larger than that on upper side due to the whirl motion of BHA, which leads to a large dynamic anti-deviation force. Hu and colleagues [
20,
21] proposed a dynamic model of BHA with a rotary steering tool using the finite element method (FEM), and the dynamic displacements and bending stress were calculated under the conditions of different structures, rotary speeds, and WOB. Chen et al. [
22] and Yang et al. [
23] proposed a multibody dynamic model of the drill-string. This model is unlike the traditional model—the developed model relaxes the assumption of continuous contact between the drill-string and the wellbore, and this model can account for overall rigid motion, 3D rotation, and large deformation of the drill-string with large-scale slenderness ratio and random contact between the drill-string and the wellbore. Wang et al. [
24] proposed a dynamic BHA with FEM; this model is used for evaluating the influence of externally added vibration to the BHA system. Lian et al. [
25] conducted an experimental and numerical study of drill-string dynamics in gas drilling of horizontal wells. Ghasemloonia and colleagues [
26,
27] introduced a coupled nonlinear axial-transverse dynamics of the drill-string. The effects of mud damping, driving torque, and spatially varying axial load were also included, and simulations revealed resonant frequencies and showed the relative severity of the contact in each span of the BHA. Liu et al. [
1] included the dynamic centrifugal force generated by drill-string rotation to propose a mechanical model of BHA with bent-housing PDM using the Timoshenko beam theory. The factors influencing the average bit side force and resultant steering force were investigated, and the results indicated that the rotational speed of the drill-string significantly influences the steering ability.
The methods available to analyze the mechanical behavior and steering ability of the BHA can be classified into three categories (
Table 1). (1) The differential equation method (DEM): The configuration and their constraints of BHA must be simplified to establish the differential equations, and then some solving methods, such as the analytical method, semi-analytical method (beam-column method), and numerical method (finite difference method and weighted residual method) can be utilized to solve the solutions. (2) The finite element method (FEM) is a very good numerical analysis method, especially suitable for solving mechanical problems with irregular areas and complex constraints, and it is widely used in static and dynamic analysis. However, its accuracy greatly depends on the size of the unit, resulting in a larger computation task and a slower operational speed. (3) The energy method is suitable for solving 2D small deformation static problems. However, it is not suitable for BHA and borehole wall contact problems.
However, the real dynamic behavior and steering ability of BHA with bent-housing PDM has seldom been investigated, and several challenges remain. (1) The influence of drill-string rotation on mechanical behavior and steering ability of BHA with bent-housing PDM has seldom been investigated. Consequently, the mechanical behavior and steering ability of BHA under fully rotary drilling conditions is still not clear. (2) Most of the analysis models and methods transformed this problem into static or quasi-static mechanical problems, so the real dynamic behavior is not reflected. (3) The coupled drill-string-bit-formation effect has been considered for whole drill-string dynamics, but the research always focused on the mechanical behavior of whole drill-string. However, its influence on mechanical behavior and steering ability of BHA was rarely introduced, so the coupled BHA-bit-formation-wellbore model should be used.
Given the above context, we aimed to investigate the dynamic behavior and steering ability of BHA with bent-housing PDM under fully rotary drilling. Considering the actual working state of downhole BHA with bent-housing PDM under fully rotary drilling, and according to the Hamilton principle, a nonlinear coupled BHA-bit-formation-wellbore model is proposed for BHA with bent-housing PDM by using the finite element method.
The present model is solved using the explicit time integration method. The movement state, impact, axial loading, torque, dynamic stress, and acceleration on BHA are simulated, and the influencing factors on the dynamic steering force are investigated. The results enable the dynamic response and steering ability of BHA with bent-housing PDM under fully rotary drilling, and also provide a theoretical basis for failure analysis of PDM tools, wellbore trajectory control of fully rotary drilling, and the optimization design of BHA.
2. Finite Element Model
Based on the finite element method (FEM), the dynamics model of drilling can be divided into two categories: nonlinear dynamics model of the entire drill-string, and nonlinear dynamics model of the BHA [
28,
29,
30]. For the entire drill-string model, the clear boundary at the wellhead makes it easy to simplify. Thus, this model can be used to simulate the actual working state of the drill-string. However, because the entire drill-string is long and the number of elements is huge, especially when considering the influence of drill-string-bit-formation-wellbore coupling, the nonlinear solution of the FEM is inefficient and time consuming. Sometimes, in order to save time and costs, the mesh size can be controlled to be large, but the solving accuracy may be not good enough. Deily et al. [
31] pointed out that if the boundary conditions of force and displacement in a hypothetical section can meet the real force and displacement, the results of the stress analysis of the BHA must be consistent with the entire drill-string. In other words, the dynamics model of the BHA can exactly reveal the dynamic response. Therefore, the present work aimed at the BHA with bent-housing PDM, and we propose a nonlinear dynamic model for the BHA below the neutral point.
2.1. Dynamic Theory
Due to the complicated loads and movement of the drill-string in the downhole borehole, finite element modelling still cannot absolutely simulate the real downhole environments for drill-strings. Therefore, basic assumptions were made as follows [
25,
26,
27,
32,
33,
34,
35]: the BHA was regarded as a slender beam; the geometry of the wellbore cross-section is circular and the wellbore collapse is ignored; the BHA is located in the center of the borehole at the initial moment; the influence of drilling fluid in the annulus is involved, but the drilling fluid flow is ignored; and the changes in the cross area between the drill pipe and joint are ignored, i.e., each section of the drill-string is regarded as a rod.
According to the Hamilton principle, the kinetic energy and potential energy at any mass point, and the work on it made by non-potential force, fulfil the following equation [
24]:
where
W is the work performed by a non-potential force,
δ is the croat symbol,
T is the total kinetic energy, and
V is the total potential energy.
For a continuous system,
T,
V, and
W can be expressed using the displacement variable
u(
z,
x,
y,
t) and angle variable
θ(
z,
x,
y,
t) of a drill-string [
26,
27,
28]. Thus, based on the finite element method, the geometric model of the drill-string can be treated as a collection of many elements, and the continuous variable in this model can then be replaced by a node interpolation variable
Ui. Then, by substituting this interpolation variable
Ui into Equation (1), we obtain the following equation:
Because the interpolation variable
δUi could be arbitrary, Equation (2) can be rewritten as:
Equation (3) is the Lagrange equation, which can be written as [
28]:
where
Fi is the generalized non-potential force,
Ui is the generalized displacement, and
t is time.
The total kinetic energy (
T) for a drill-string element is:
The translational kinetic energy
Tt and rotational kinetic energy
Tr can be given as [
28]:
where
ρ is the density of the drill-string,
A is the cross-sectional area of the drill-string,
L is the length of the drill-string element,
Jt is the radial rotation inertia,
Jbn is the polar moment of inertia, and
θ is the rotational angle of drill-string element.
The total elastic potential energy (
Vi) for a drill-string element [
28] is:
where
E is the elastic modulus of the drill-string,
ν is the Poisson ratio of the drill-string, and
G is the shear modulus of the drill-string.
If the drill-string system is dispersed using the finite element method, the dynamic equation of the BHA-bit-formation-wellbore system can be obtained:
where [
M] is the mass matrix,
is the generalized acceleration vector, [
C] is the damping matrix,
is the generalized velocity vector, [
K] is the stiffness matrix,
is the generalized displacement vector, and {
R} is the generalized external load vector.
2.2. Finite Element Model of BHA-Bit-Formation-Wellbore System
In order to establish the finite element of a bottom hole assembly with bent-housing PDM tool, the following BHA configuration was used: Ф215.9 mm PDC bit × 0.35 m + Ф172 mm bent-housing PDM tool (1.25°) × 8.00 m + Ф208 mm stabilizer × 1.00 m + Ф165 mm non-magnetic drill collar (NMDC) × 9.00 m + Φ139.7 mm heavy weight drill pipe (HWDP) × 60.00 m. The geometric parameters of this BHA are listed in
Table 2.
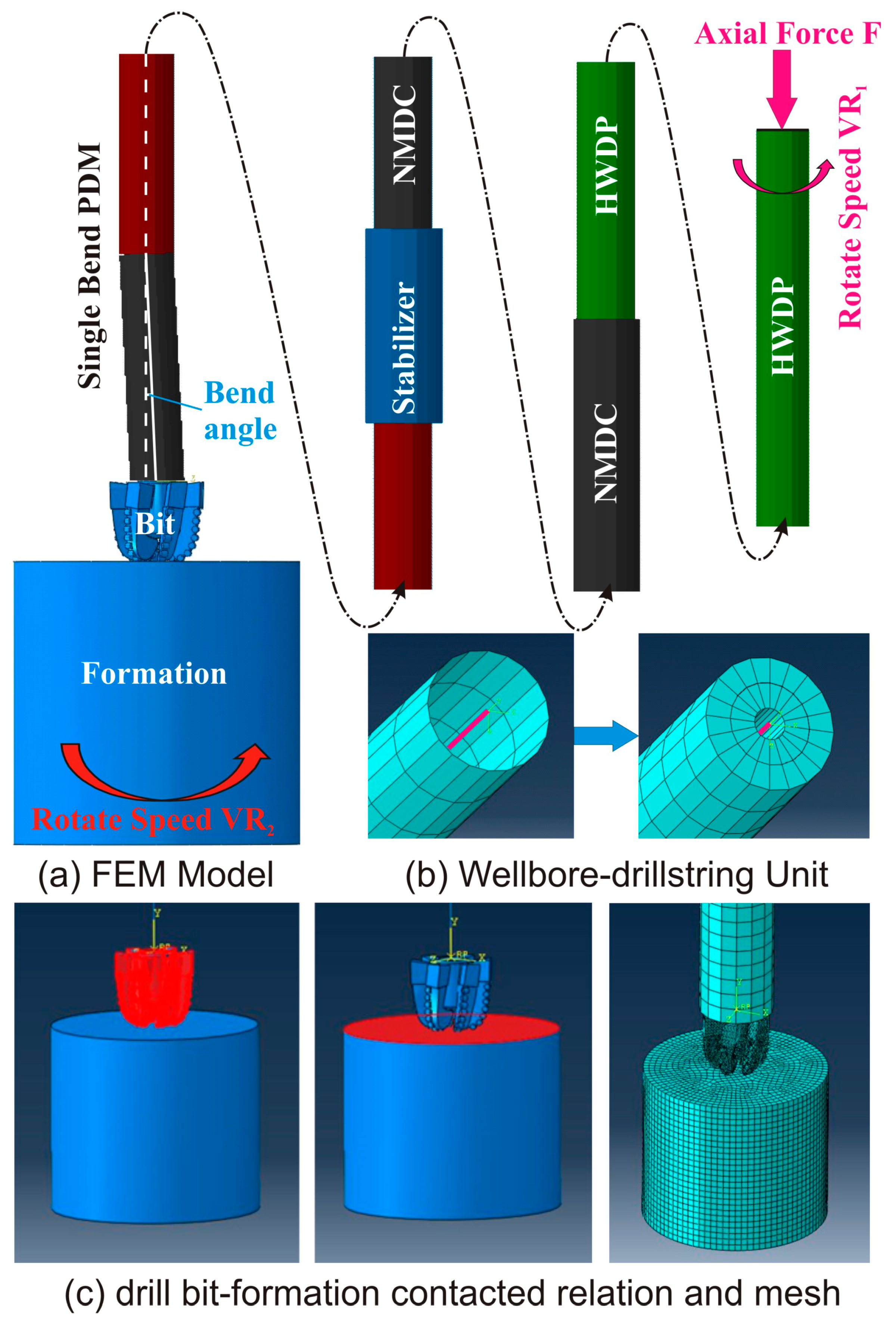
In order to obtain the actual motion and force of the BHA, by involving the real formation, the full-sized PDC bit, and the full-sized wellbore, a 3D model was proposed by using ABAQUS software (Dassault Systèmes Simulia Corp., Waltham, MA, USA), as shown in
Figure 1. The whole model is shown in
Figure 1a. The top section shows a HWPD, followed by NMDC, stabilizer, and PDM tool and bit, and the bottom part is the formation. The PDM tool, stabilizer, drill collar, and drill pipe were simplified as a beam element (B31), and each section had different properties. Because the B31 element was a kind of Timoshenko, and the shear deformation of the beam was involved in this element, it was suitable for simulating the rotating slender drill-string. The top section of BHA was rotated by the upper drill-string with a rotate speed (VR
1) to simulate the rotation of the rotary table. The formation was rotated with a rotate speed (VR
2) to simulate the rotation of the rotor in PDM tool. In order to simulate the drill-string-wellbore coupling, the drill-string-wellbore unit was used, as shown in
Figure 1b. Considering the B31 element has no thickness, in order to avoid the influence of the gap between the drill-string and borehole wall, the thickness of wellbore was thickened to eliminate its impact. In addition, because the ABAQUS software does not support the definition of internal contact, we defined the internal contact between the bit and formation by modifying the inp command flow of the model, as shown in
Figure 1c.
There is an important aspect regarding the simplified processing of the bend angle of the PDM tool. In this paper, we used a restarting analysis method for the ABAQUS software. We also used the combination analysis method of Standard implicit and Explicit display. The processing can be summarized as follows: (1) Set up a Standard static analysis step, then define the contact relationship between the bit and wellbore wall, and calculate the prestressed state of the BHA caused by the bend angle. (2) Set up a new Job and propose an Explicit dynamic analysis step, then add the stress state file that was obtained in the first step in Load module, and submit to simulate.
2.3. Boundary Conditions
When the FEM was proposed, the next step was to apply the boundary conditions. First, establish the generalized contact relationship between the drill-string and wellbore, and define contact attributes, where the deviation angle of borehole is set as 30°. Then, set the viscous damping coefficient of the drilling mud, which is used to simulate the damping effect of the drilling mud on the drill-string, and the mud density is set as 1.2 g/cm3. Define internal contact relationship between the drill bit and formation. Apply an axial loading of 50 kN at the top section of the BHA to simulate the weight-on-bit (WOB), and apply a rotate speed VR1 = 60 rpm at the top section of BHA to simulate the rotation of the rotary table. Apply a rotation speed VR2 = 180 rpm on the formation to simulate the rotation of the rotor in PDM tool.
After applying boundary constraint and load conditions, we used the ABAQUS/EXPLICIT integral algorithm to solve the dynamic model of BHA-bit-formation-wellbore system. By solving Equation (9), we obtained the simulation results of dynamic model for the BHA-bit- formation-wellbore system.
2.4. Extracting the Resultant Steering Force
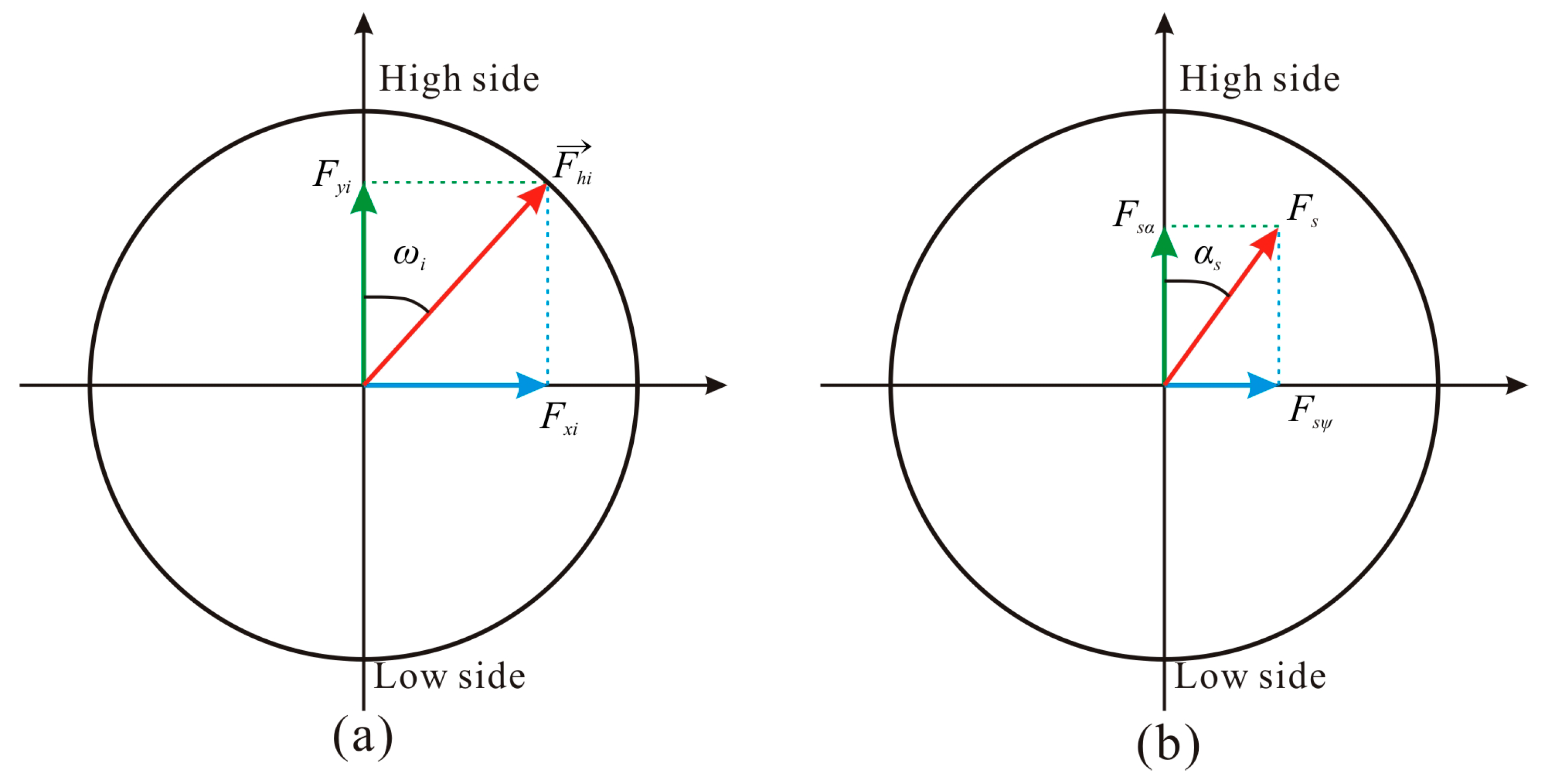
According to the deviation angle and azimuth angle of the BHA, the position of the drill bit at the bottom can be determined. In this present model, the bit pointed to the low side of the borehole at the initial moment, and the low side (90°) is located at the 6:00 position of the wellbore or the bottom of the hole, whereas the high side (0°) is the 12:00 position of the wellbore or the top of the hole. In order to obtain the dynamic resultant steering force on bit in one round, we used a decomposition and synthesis of forces to calculate the steering force on the bit. As shown in
Figure 2a, the side force on the bit is a vector
; thus, the side force
can be decomposed into azimuth force
in the x direction and build-up force
in the y direction:
where,
is the vector of side force on the bit,
is the azimuth force in the x direction,
is the build-up force in the y direction,
is the tool face angle, and
i is the simulating step in one round,
i = 1 –
n, where
n is the total number of simulating steps.
Then, the resultant build-up force and azimuth force can be expressed as [
19]:
where
is the total build-up force in the y direction and
is the total azimuth force in the x direction.
The build-up and drop-off force can be expressed as:
where
is the average build-up force and
is the average drop-off force.
Thus, as shown in
Figure 2b, the resultant steering force in one round can be obtained [
19]:
where
is the resultant steering force in one round.
As shown in
Figure 2b, the direction angle of steering force can be expressed as [
19]:
where
is the direction angle of the resultant steering force in one round.
4. Verification of Dynamic Steering Force
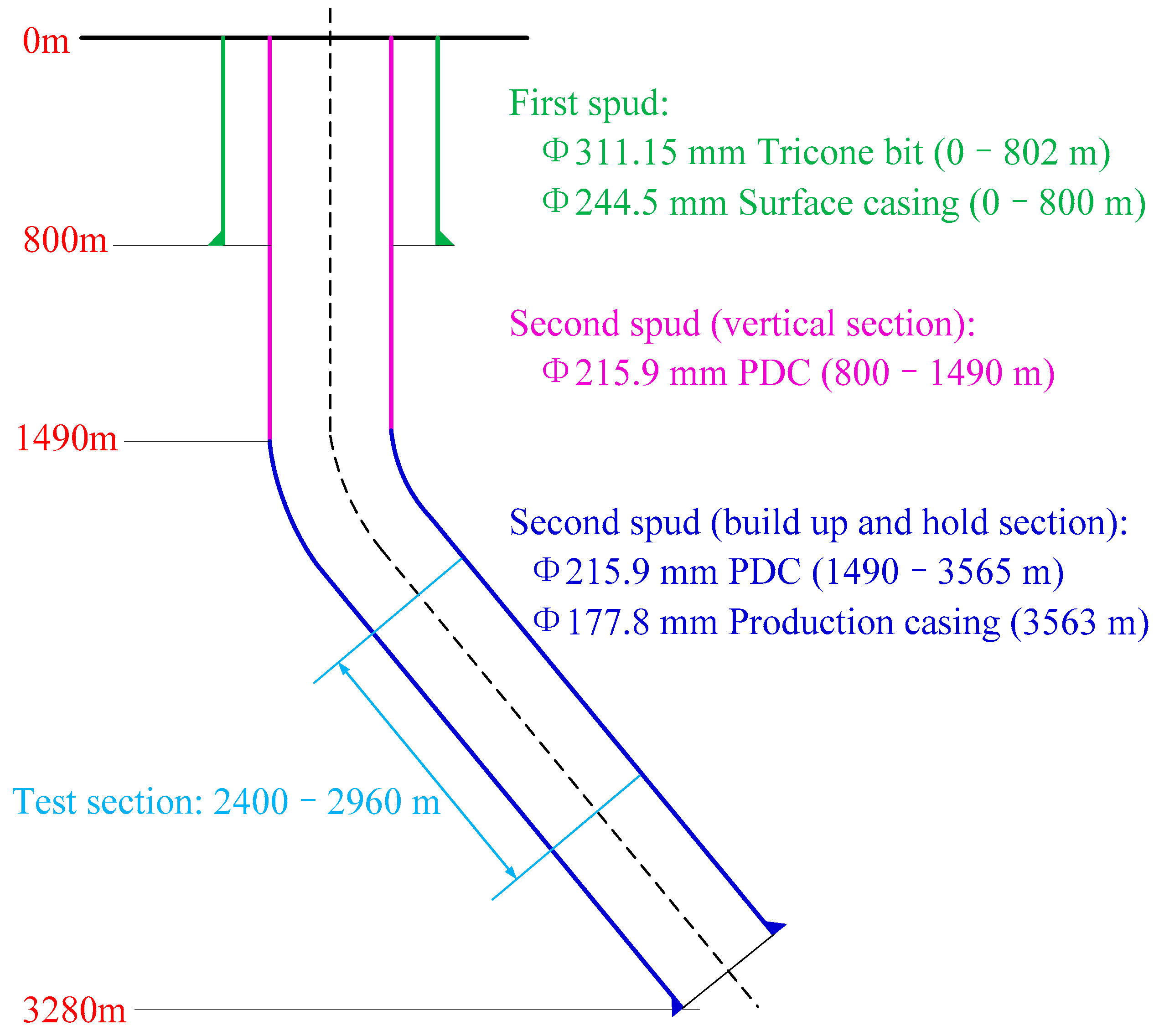
In order to verify the solution results of dynamic steering force, a directional well B located in the Sichuan basin in China was used to verify our model. The trajectory of well B is a kind of “straight-build-hold” type. The well had a kick off depth of 1490 m and a build-up rate of 3°/30 m. The designed target had a true vertical depth (TVD) of 3280 m, a final deviation of 25.95°, and an azimuth of 293.06°. After finishing the sliding drilling of the build-up section, fully rotary drilling, combining the BHA with a bent-housing PDM and MWD tool, was used to drill the hold-on section at the measured depth of 2400–2960 m. The configuration of drill-string and casing program were as follows. The casing program (
Figure 10) was Φ311.15 mm Bit (0–802 m) × Φ244.5 mm casing (0–800 m) + Φ215.9 mm bit (802–3565 m) × Φ177.8 mm casing (0–3563 m). The configuration of drill-string was Ф215.9 mm PDC, Ф172 mm 1.25° PDM, Ф208 mm stabilizer, Ф165mm NMDC, and Φ139.7 mm HWPD. The drilling parameters were rotation speed of 60 rpm, WOB of 60–80 kN, and mud density of 1.20 g/cm
3.
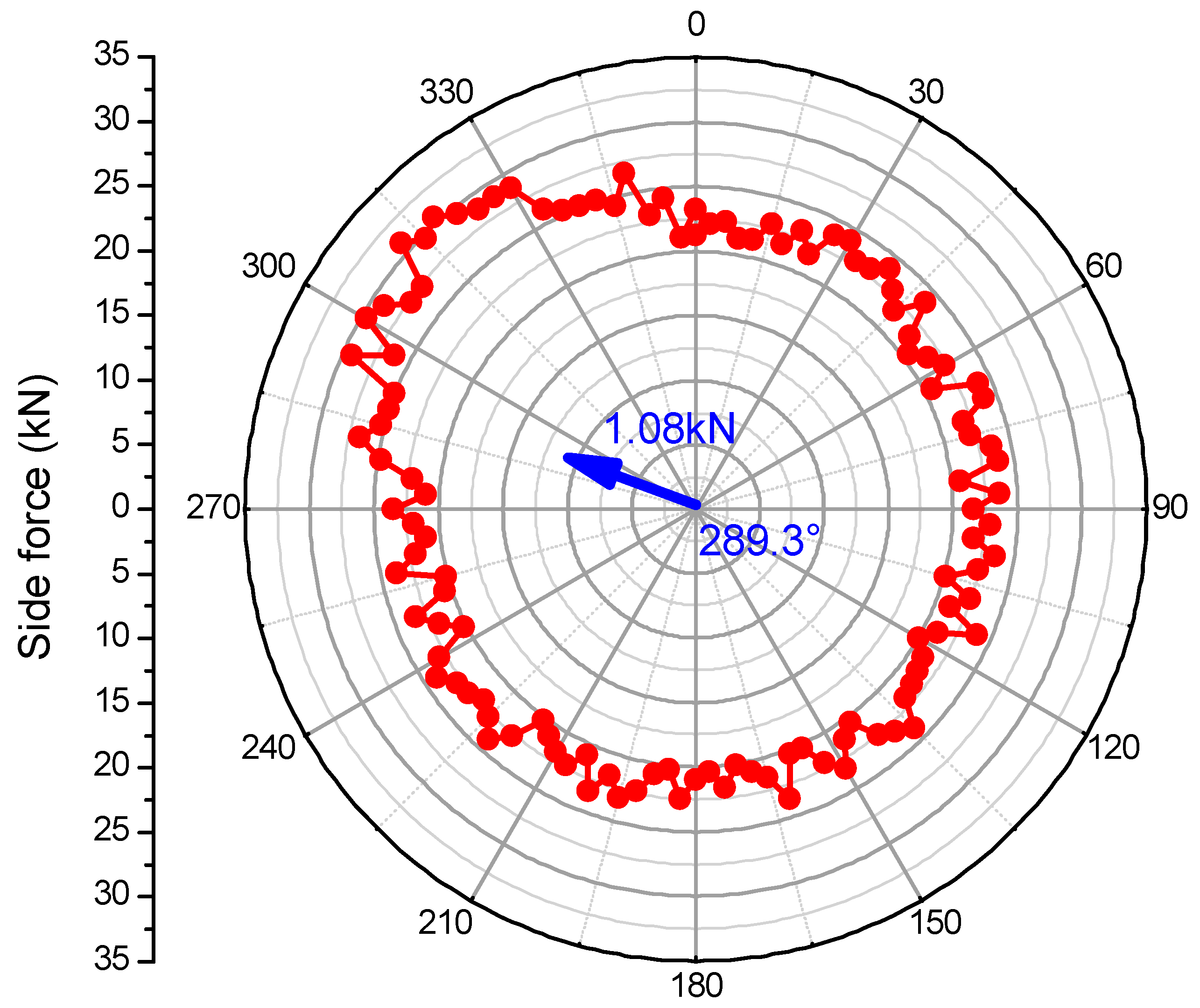
We conducted a numerical simulation for this well, and the side force acting on the drill bit in one round is shown in
Figure 11. The side force along a given tool face angle was large, ranging from 20.01 to 30.73 kN, and the mean was approximately 23.08 kN. In other words, the steering force of sliding drilling was large for this well, and it is a typical build-up BHA. However, due to the rotation of the whole drill-string, the side force along a given tool face angle was not the resultant steering force.
By using the method mentioned above, the resultant steering force can be determined: Fs = 1.08 kN and αs = 289.3°. Although the steering force along a given tool face angle is large (20.01–30.73 kN), when the drill-string was rotated by the rotary table, the resultant steering force in one round was much less than the steering force along a given tool face angle (~1.08 kN). Thus, the rotation of drill-string is conducive for the hold-on deviation angle, and the present BHA showed mild build-up ability in deviation.
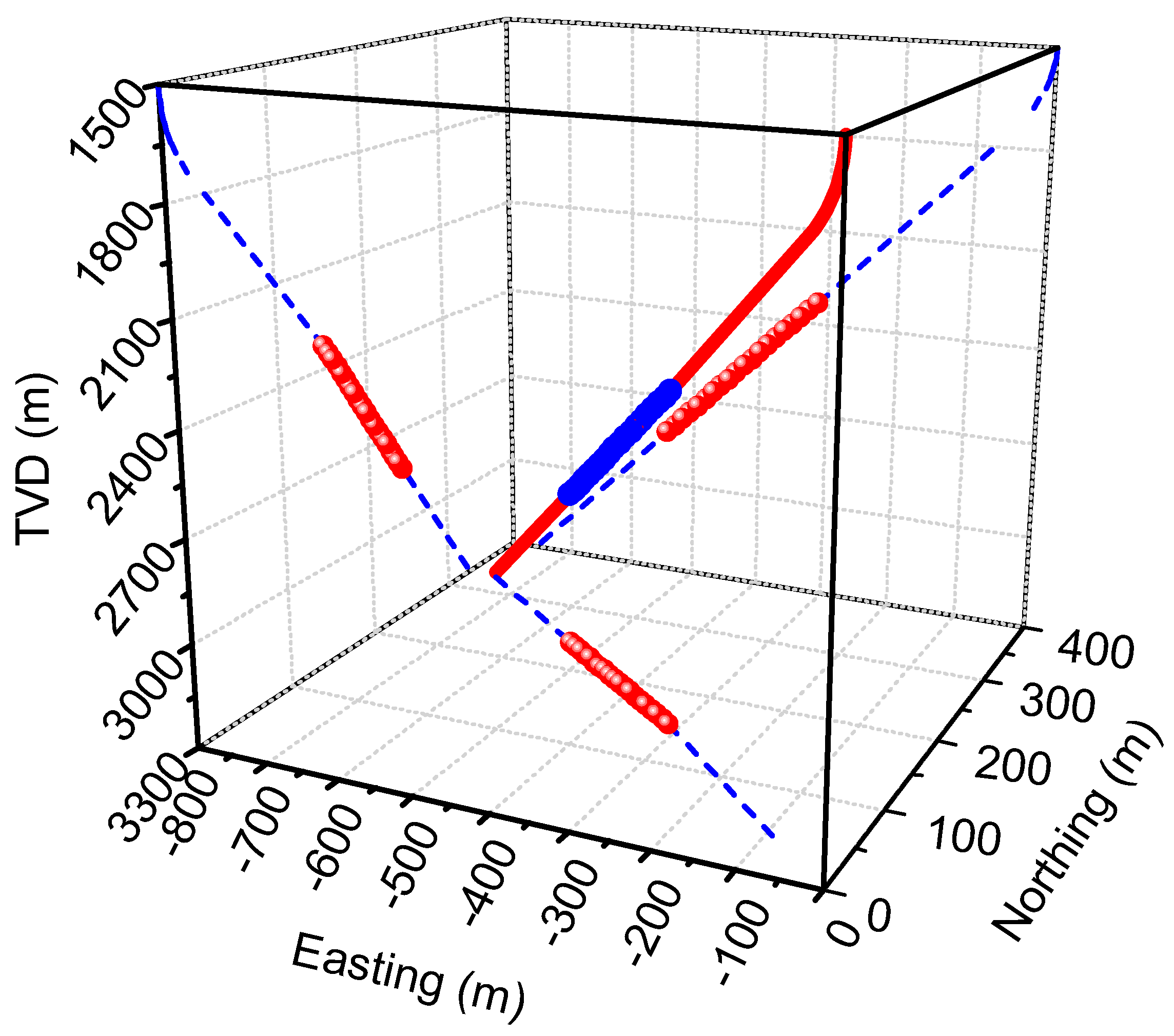
The trajectory of well B in the test interval is shown in
Figure 12, and the trajectory data are listed in
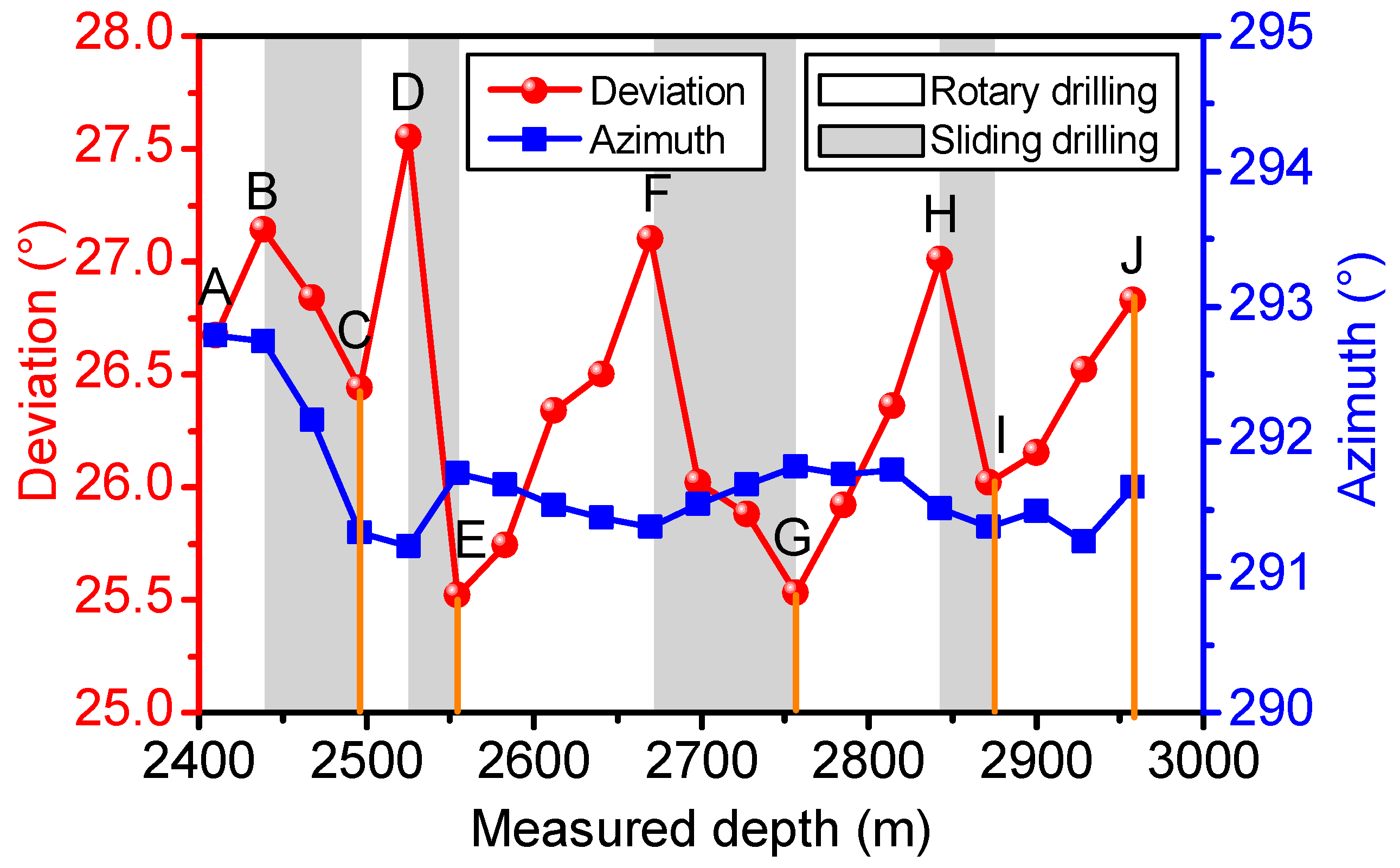
Table 3. We found that the overall angle in this hold-on section ranged from 0.041 to 0.707°/30 m, and the average of overall angle was approximately 0.195°/30 m. In fact, the present BHA presented slight build-up ability, as shown in
Figure 13. There were five slight build-ups in the deviation during fully rotary drilling. In
Figure 13, the well interval of 2409.87–2438.80 m (AB), 2496.59–2525.49 m (CD), 2554.40–2669.78 m (EF), 2756.39–2843.00 m (GH), and 2871.94–2957.70 m (IJ) were drilled using fully rotary drilling, whereas the other well intervals, 2438.80–2496.59 m (BC), 2525.49–2554.40 m (DE), 2669.78–2756.39 m (FG), and 2843.00~2871.94 m (HI), were drilled using sliding drilling to control the wellbore drop-off. As a result, the length of the well interval for sliding drilling was approximately 173.38 m, whereas the length of the well interval for fully rotary drilling was approximately 345.58 m. Thus, the ratio of sliding drilling in the test well interval reached 36.92%, whereas the ratio of fully rotary drilling was 63.08. The use of sliding drilling may lower the ROP, consume time and money, and easily forms “small steps” that affect the tortuosity of the wellbore, which overall decrease the borehole quality. Thus, these results obtained above were consistent with the numerical simulation results; in other words, the present model was verified.
6. Conclusions
According to the Hamilton principle, a nonlinear coupled BHA-bit-formation-wellbore model was proposed for BHA with bent-housing PDM using the finite element method. The impact force, axial loading, torque, dynamic stress, axial acceleration, and lateral acceleration on BHA were simulated, and the factors influencing dynamic steering force were investigated. The following main conclusions can be drawn.
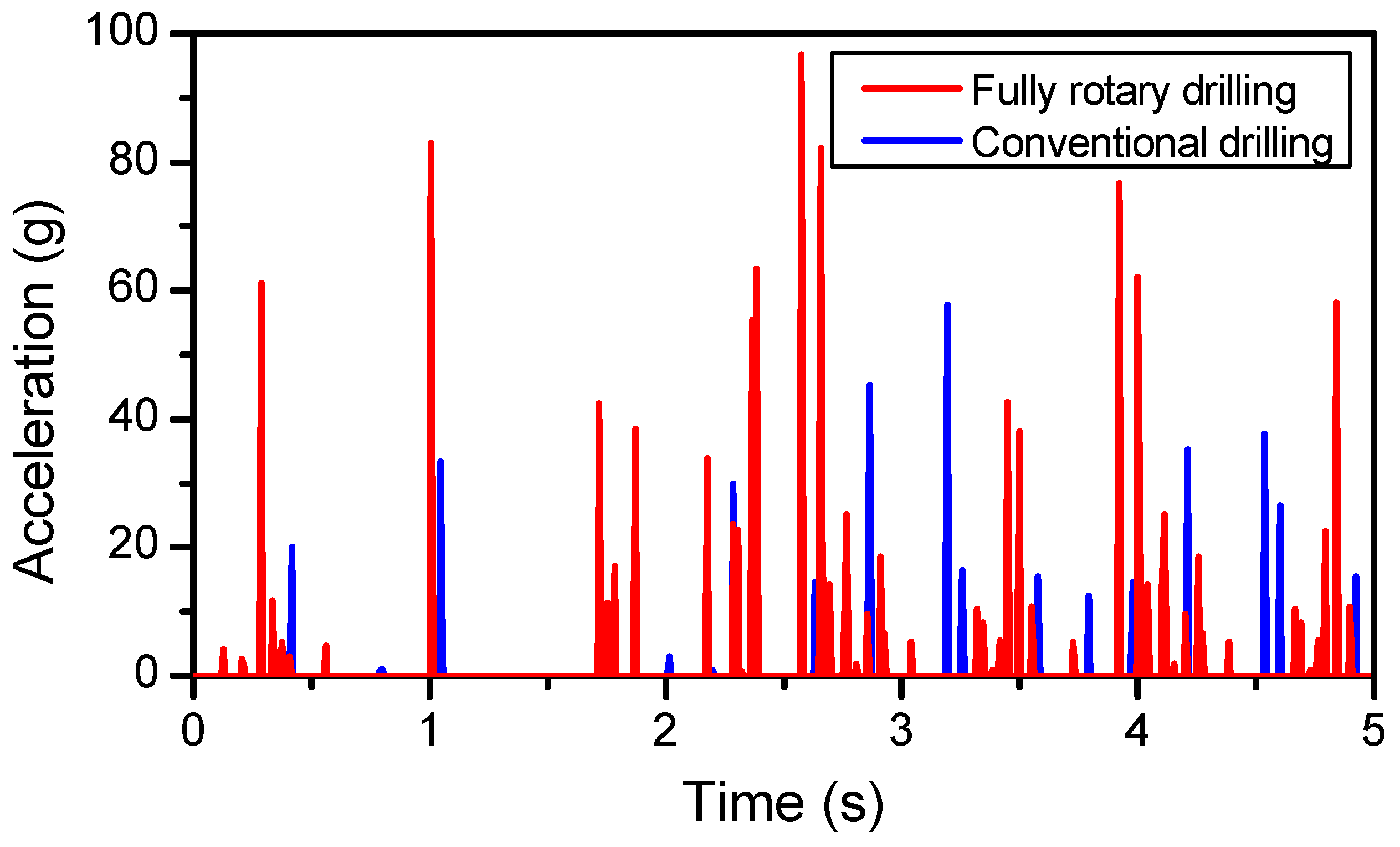
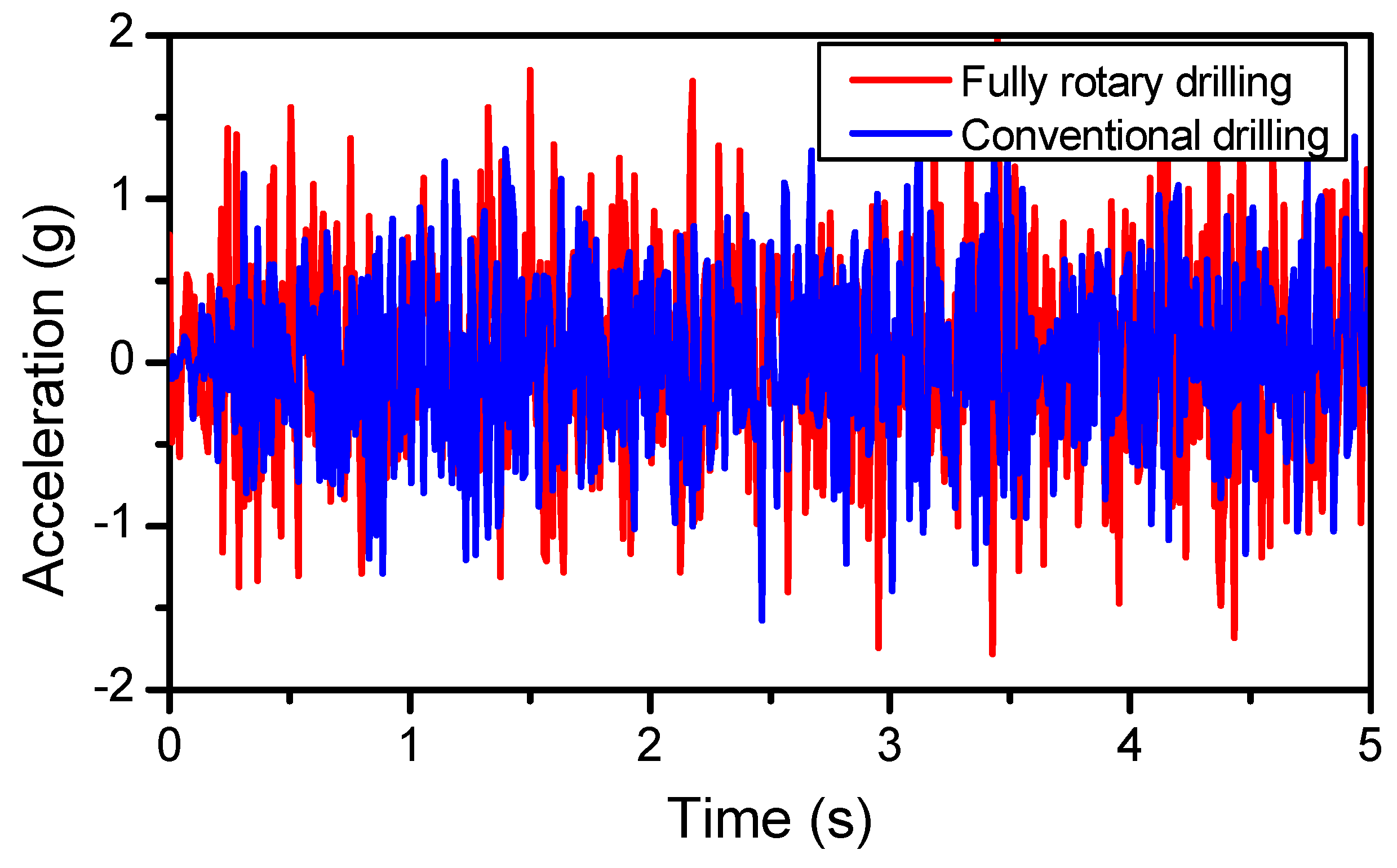
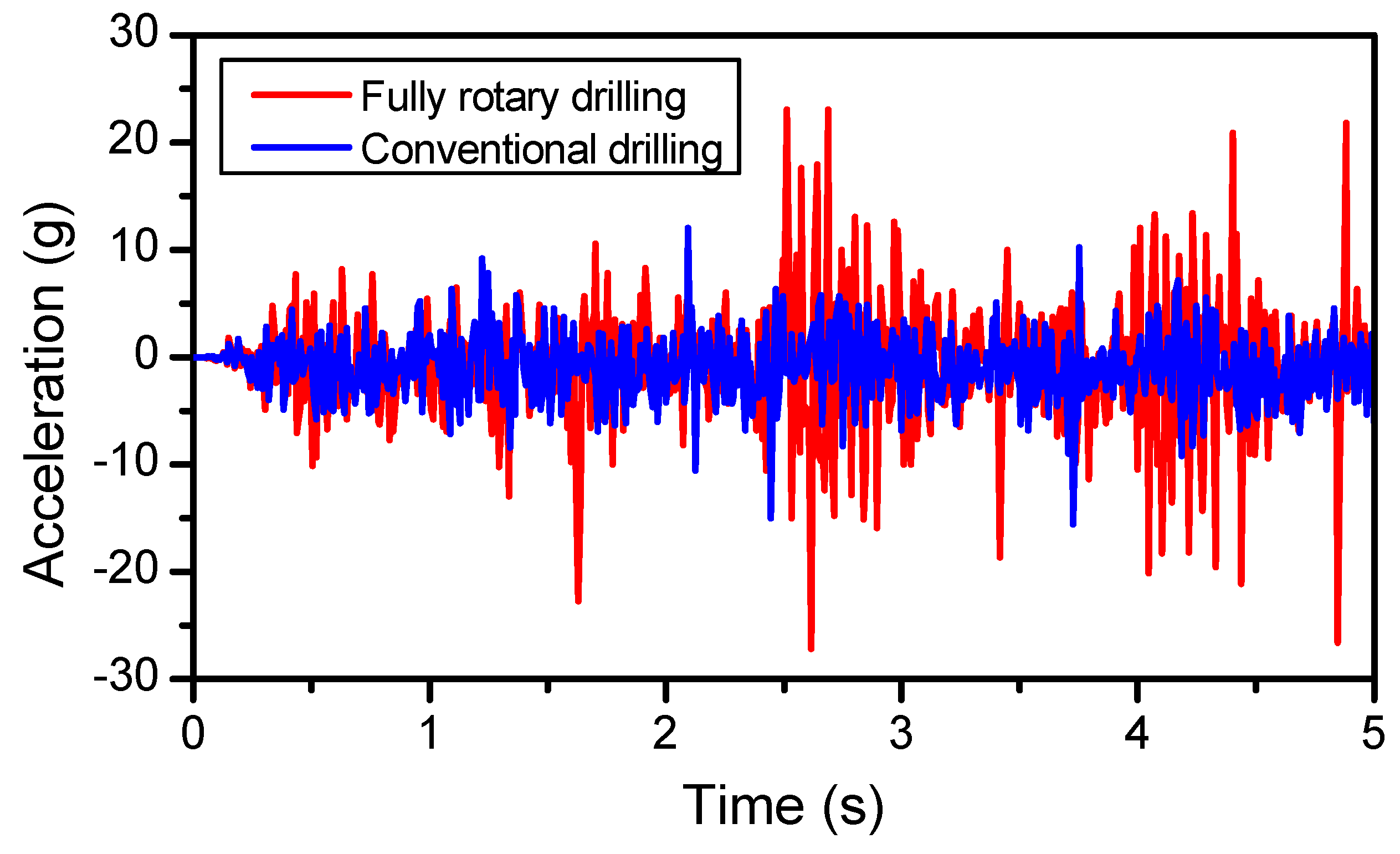
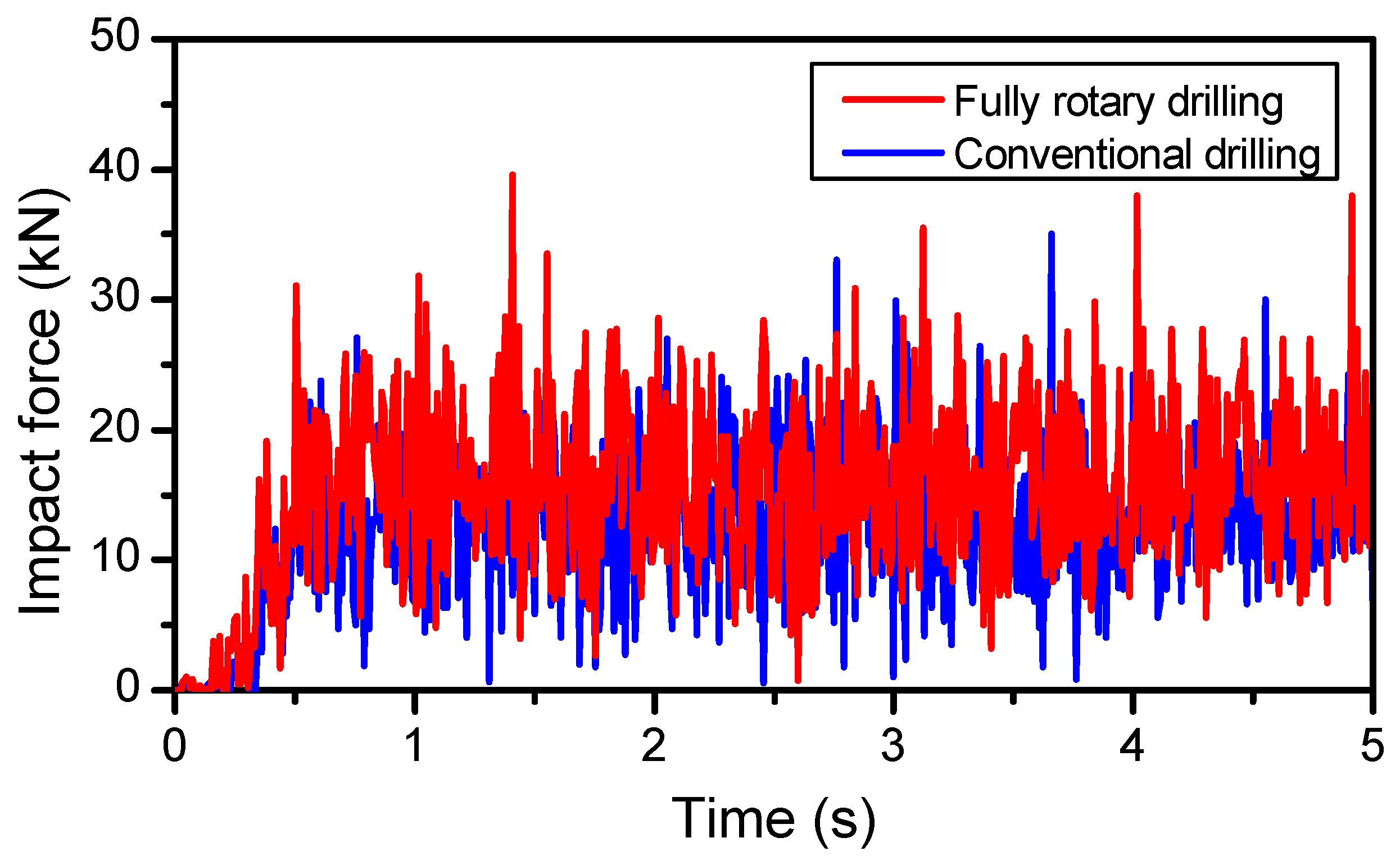
Firstly, for fully rotary drilling, the lateral acceleration is obviously greater than that of the axial acceleration, where lateral acceleration ranges from –10 g to 10 g, whereas the axial acceleration only ranges from –2 g to 2 g. The transient lateral acceleration can reach approximately 23.1 g. A severe lateral impact between the drill-string and borehole wall may cause the MWD tool damage, and even cause drill-string failure.
The FEM simulation and field test in well B confirmed that the rotation of the drill-string is conducive to the hold-on of the deviation angle, and the present BHA showed mild build-up ability in deviation. Although the steering force along a given tool face angle is considerable, when the drill-string was rotated by the rotary table, the resultant steering force in one round was not as large.
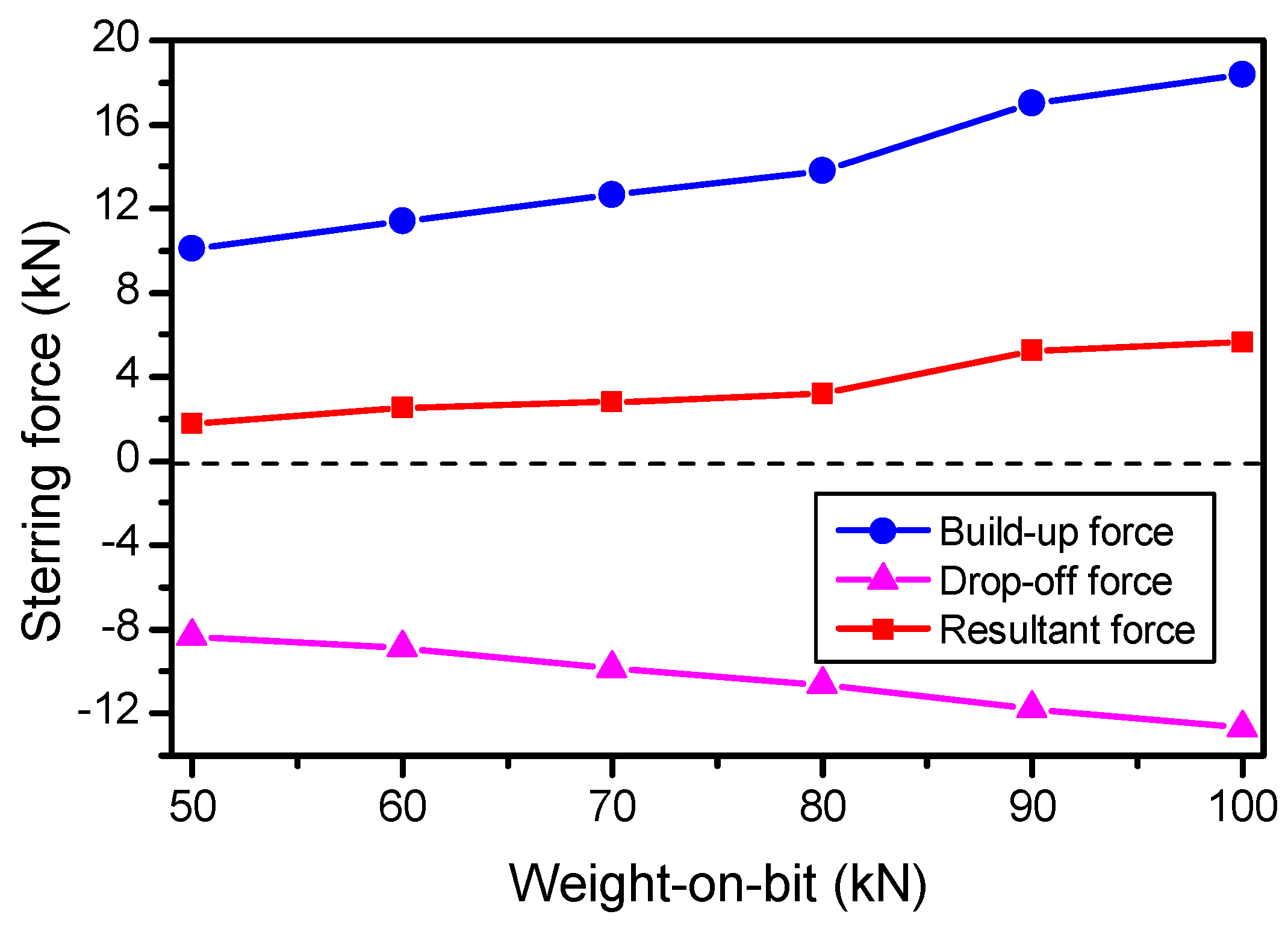
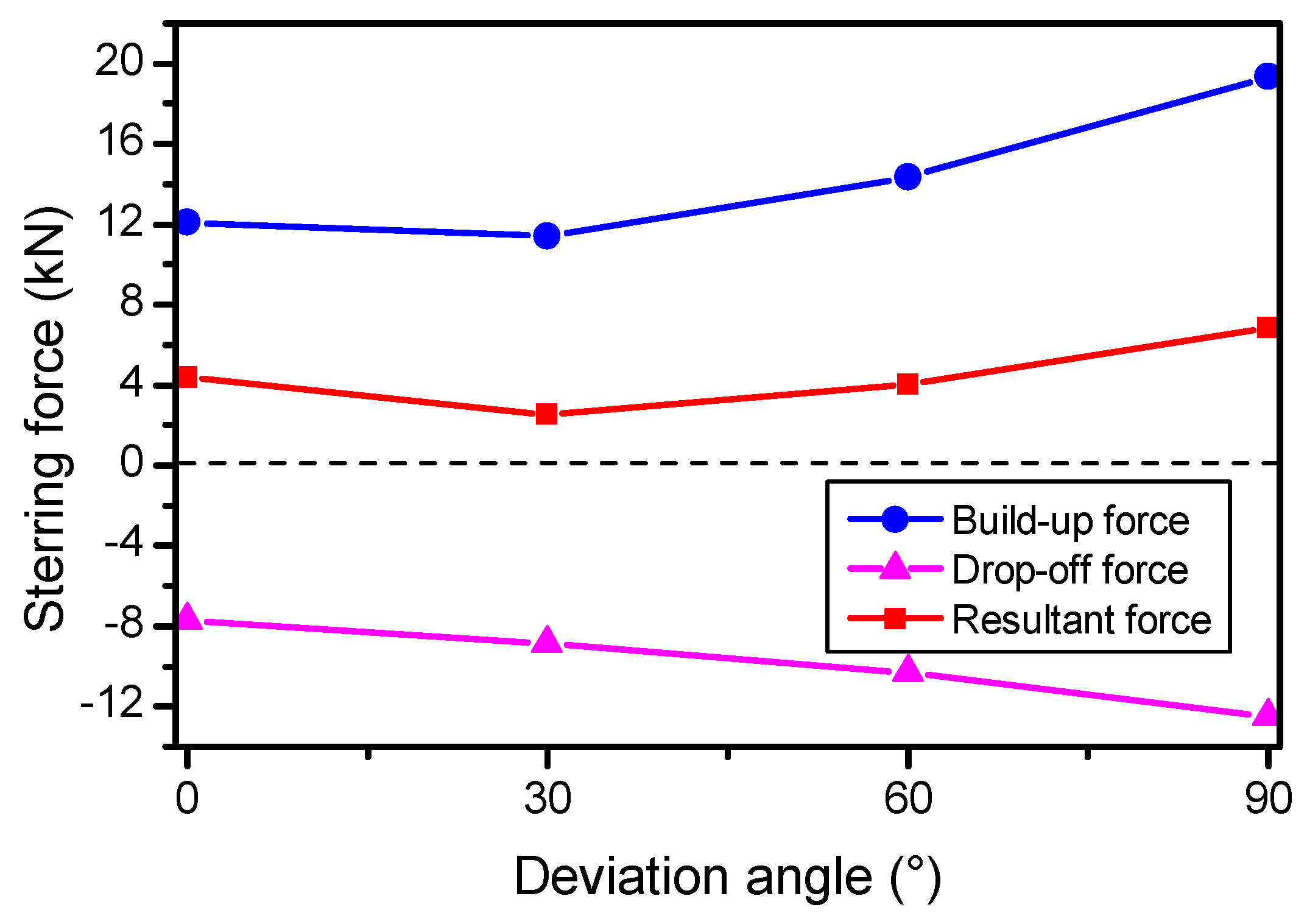
With the increase in the WOB and bend angle, and the higher stabilizer locations, the deflecting force on the drill bit increased, which is not conducive to the hold-on of the deviation angle. With the increase in stabilizer diameter, the deflecting force on drill bit decreased, which is conducive to the hold-on of the deviation angle. With the increase in the deviation angle, the deflecting force on the drill bit first decreased and then increased. Therefore, when designing the BHA, the configuration parameters of BHA and drilling parameters, such as bend angle, stabilizer location, stabilizer diameter, WOB, and rotation speed should be carefully considered to meet the requirements of oil and gas field drilling.


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}