A Comprehensive Review of Winding Short Circuit Fault and Irreversible Demagnetization Fault Detection in PM Type Machines



Abstract
:1. Introduction
2. Modeling and Characteristics of ITSF and IDF in PMSM
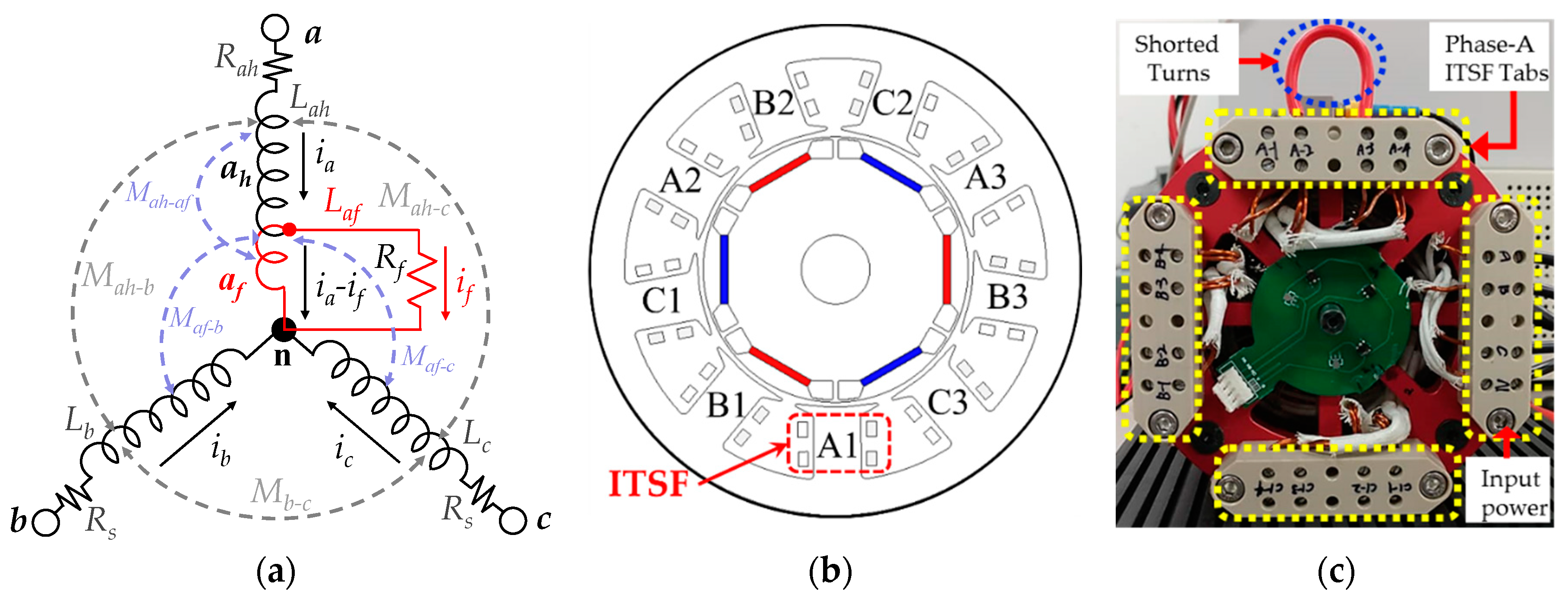
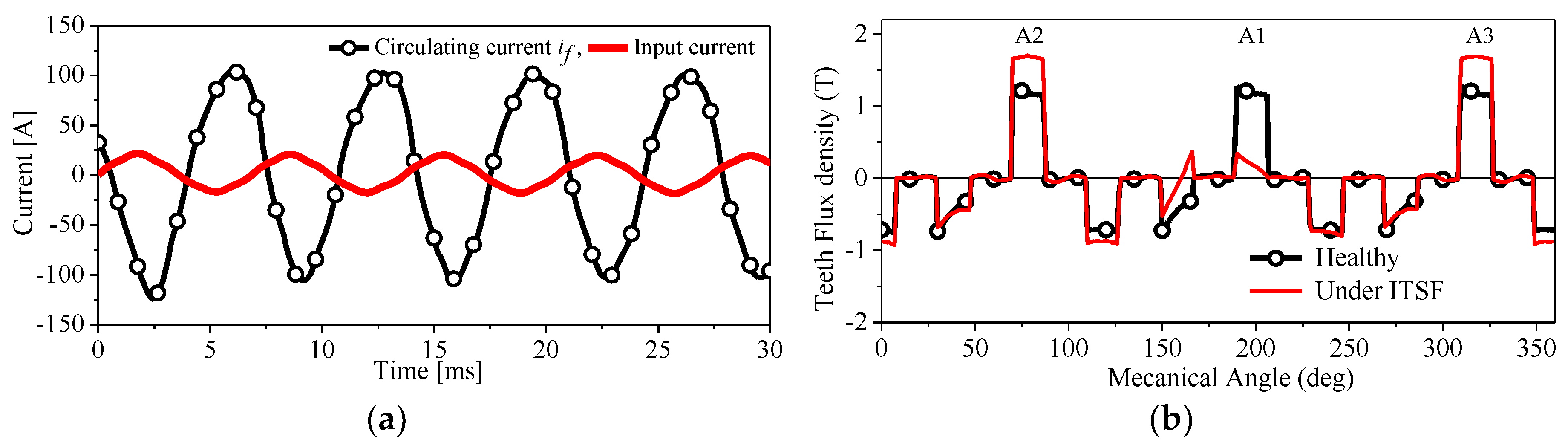
2.1. Inter-Turn-Short Fault (ITSF)
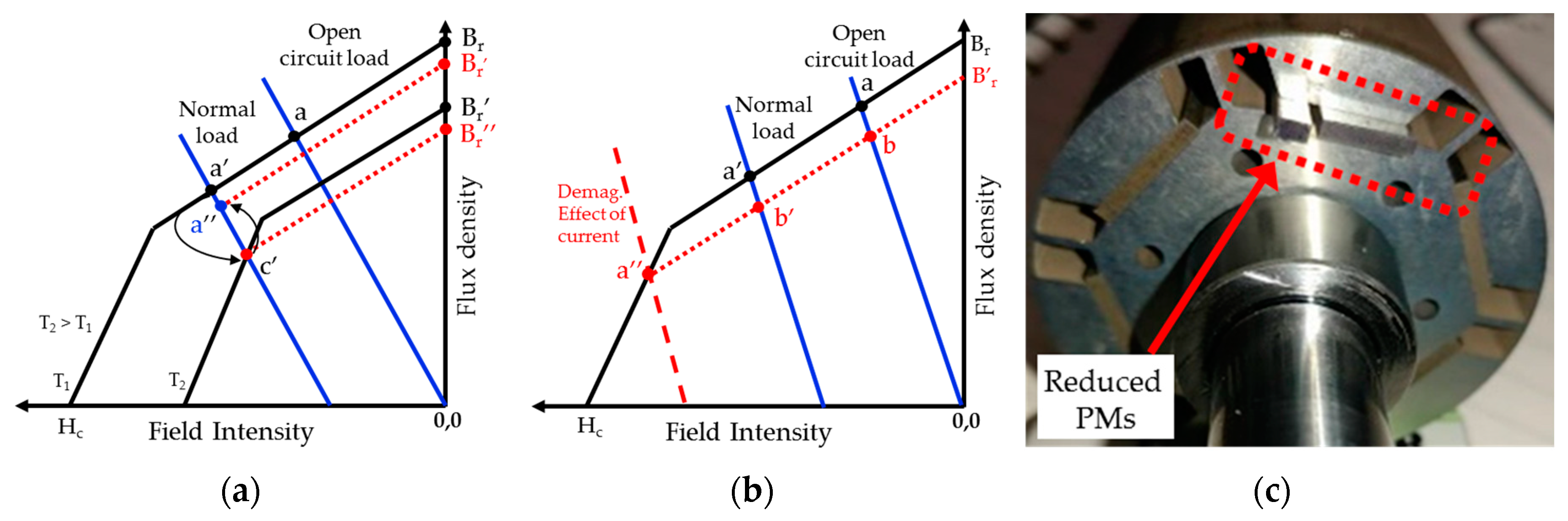
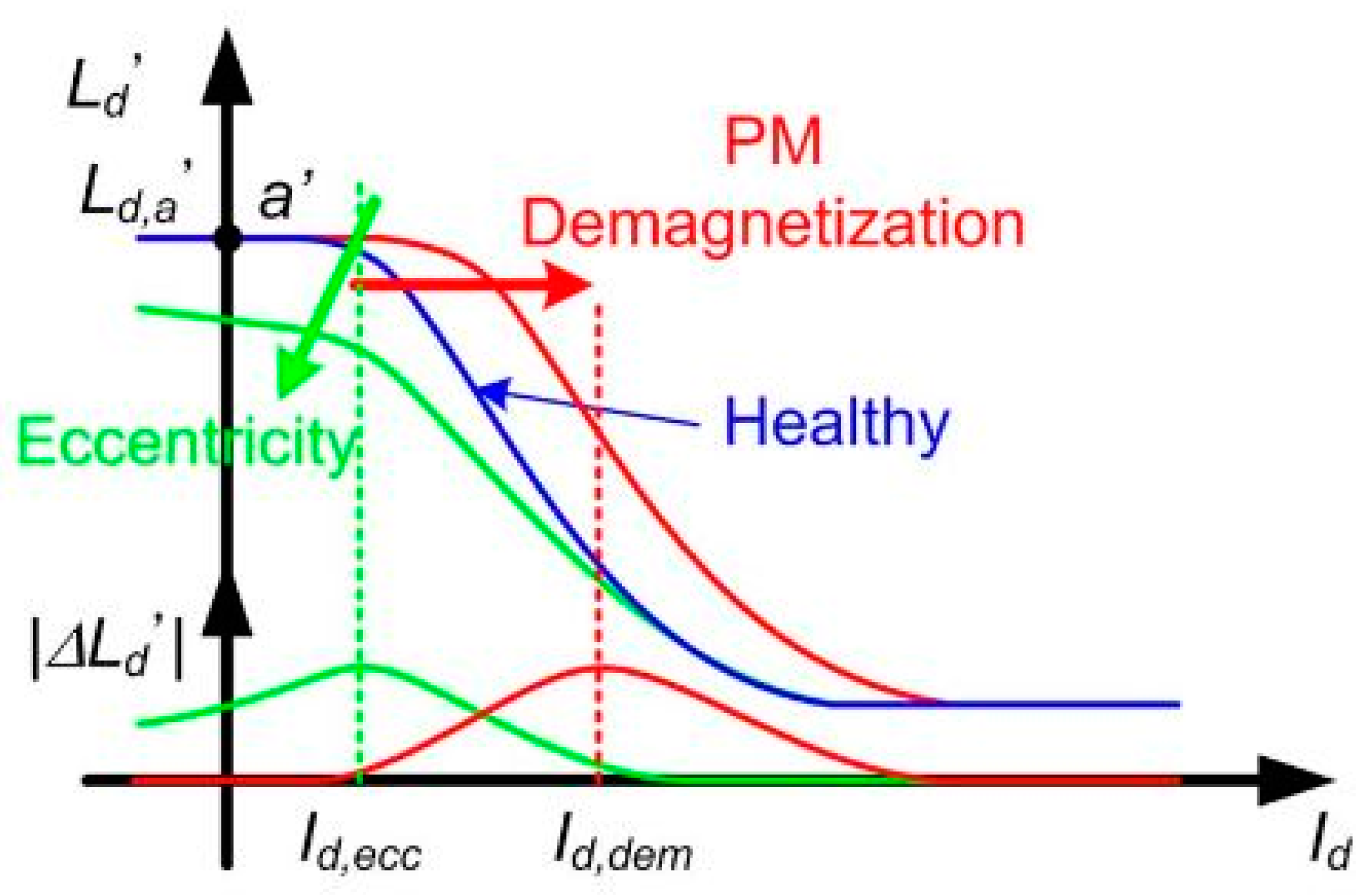
2.2. Irreversible Demagnetization Fault
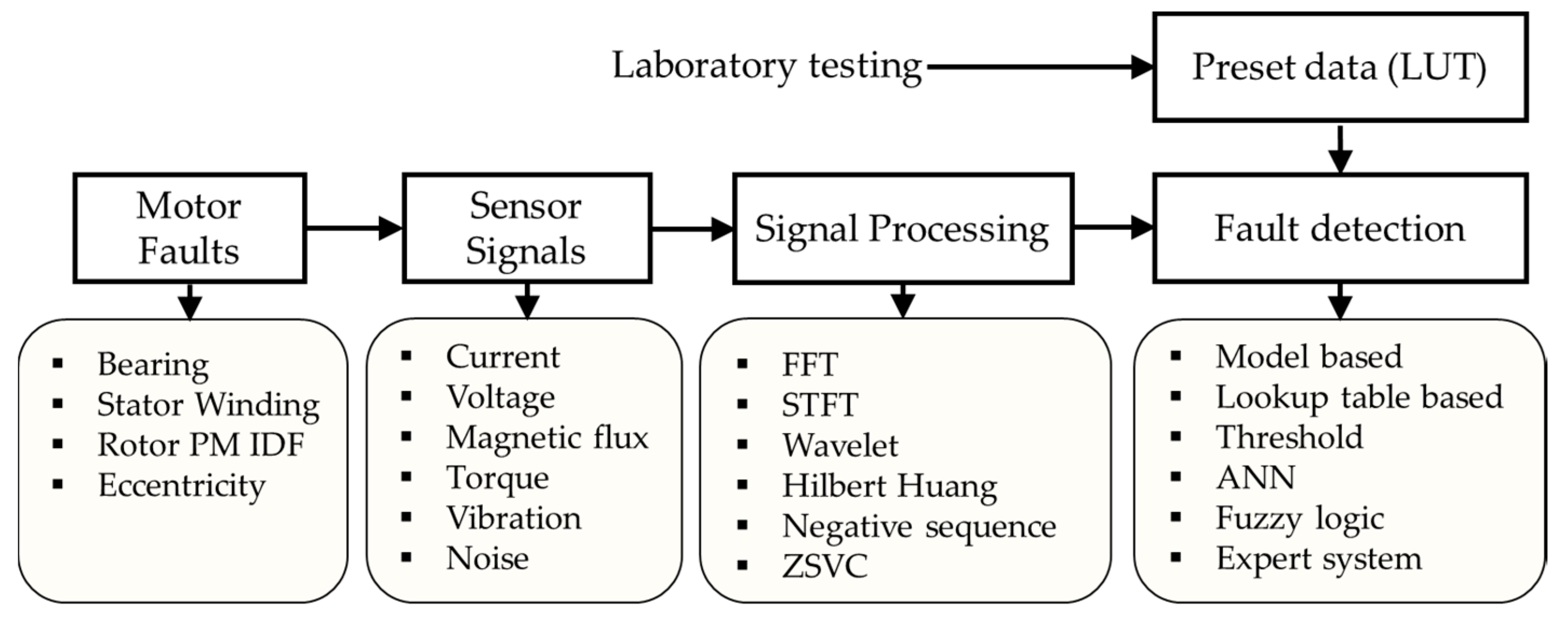
3. Fault Detection and Identification in PMSM
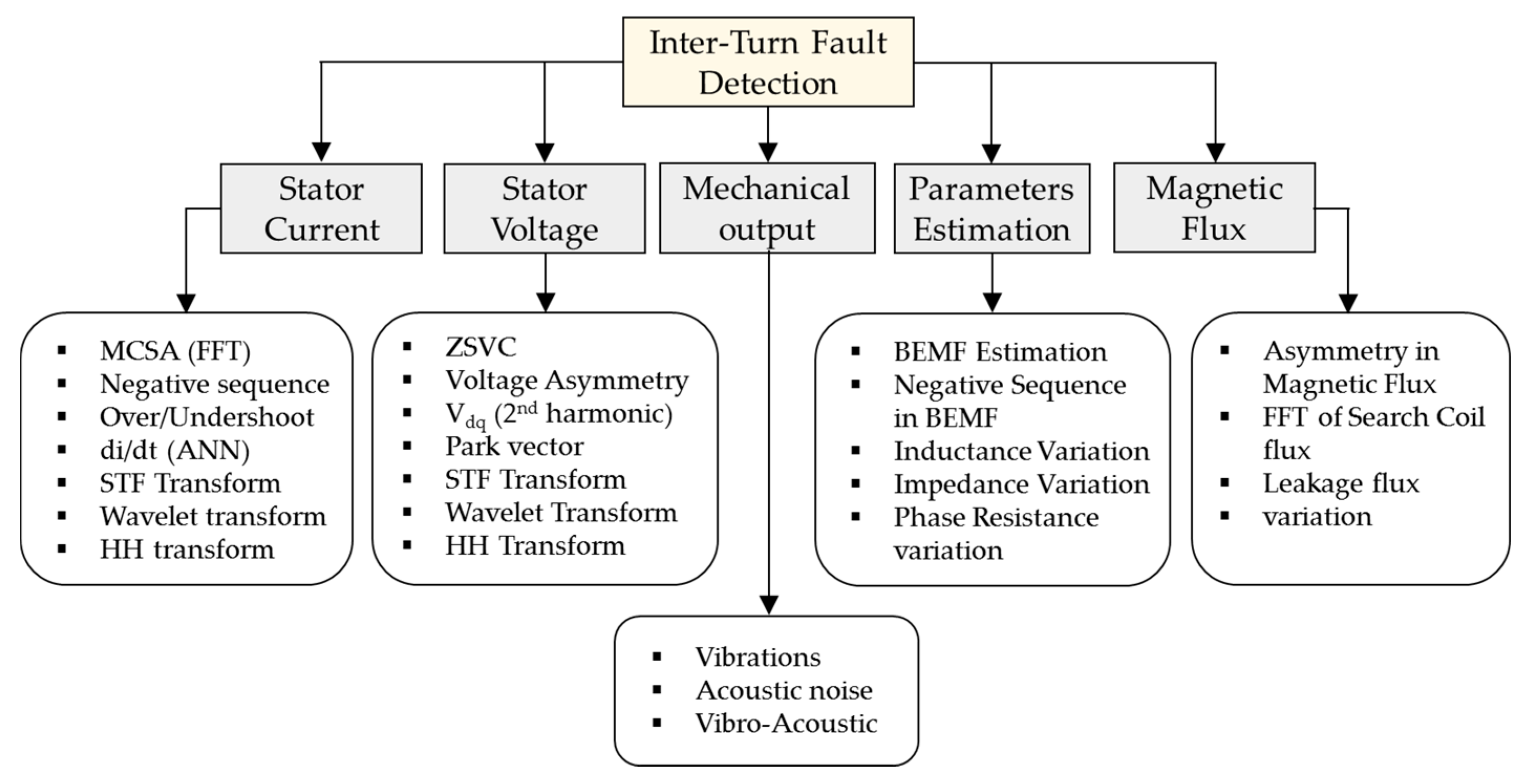
3.1. Detection Techniques of Inter-Turn-Short Fault
3.1.1. Stator Current Analysis Based Detection Techniques
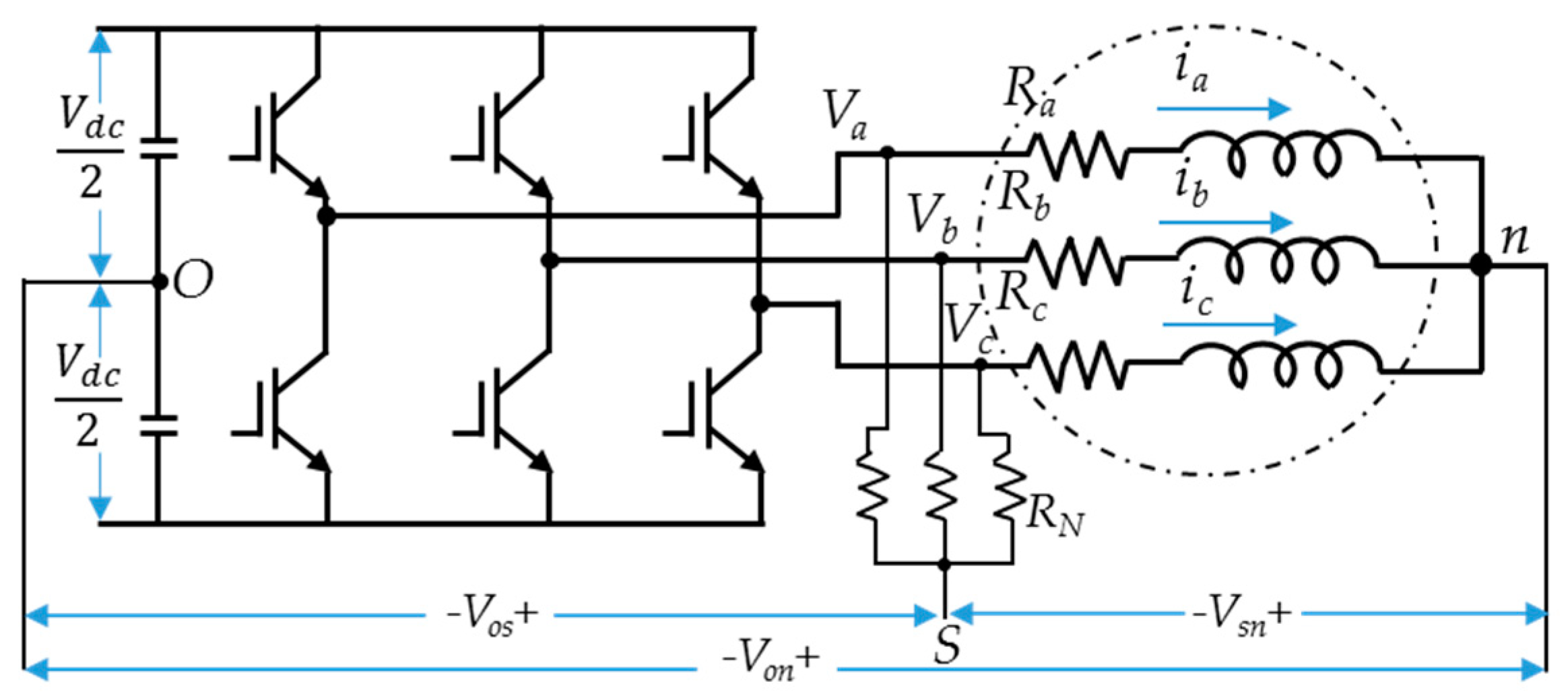
3.1.2. Voltage-based Detection Techniques
3.1.3. Parameter Estimation Based Detection Techniques
3.1.4. Search Coil Based Detection Techniques
3.1.5. Vibration and Acoustic Noise-Based Detection Techniques
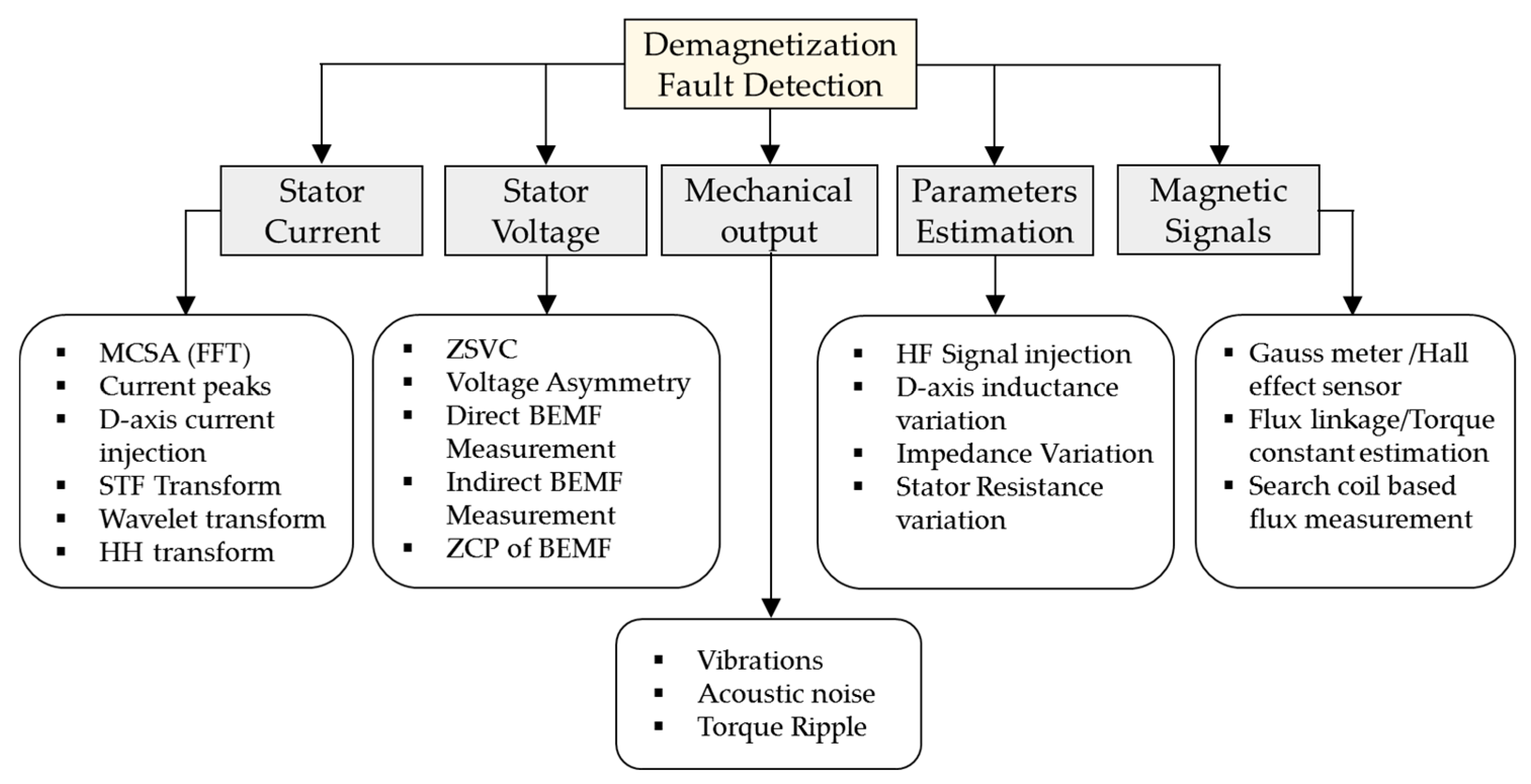
3.2. Detection Techniques of PM Irreversible Demagnetization Fault (IDF)
3.2.1. Stator Current Based Detection Techniques
3.2.2. Voltage-Based Detection Techniques
3.2.3. Parameter Estimation Based Detection Techniques
3.2.4. Magnetic Signal Based Detection Techniques
3.2.5. Vibration and Acoustic Noise-Based Detection Techniques
3.2.6. Torque Ripple Based Detection Techniques
4. Summary and Discussion
5. Suggestion for Future Work
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zafarani, M.; Bostanci, E.; Qi, Y.; Goktas, T.; Akin, B. Inter-turn Short Circuit Faults in Permanent Magnet Synchronous Machines: An Extended Review and Comprehensive Analysis. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 2173–2191. [Google Scholar] [CrossRef]
- Faiz, J.; Mazaheri-Tehrani, E. Demagnetization modeling and fault diagnosing techniques in permanent magnet machines under stationary and nonstationary conditions: An overview. IEEE Trans. Ind. Appl. 2017, 53, 2772–2785. [Google Scholar] [CrossRef]
- Zhao, K.-H.; Chen, T.-F.; Zhang, C.-F.; He, J.; Huang, G. Online fault detection of permanent magnet demagnetization for ipmsms by nonsingular fast terminal-sliding-mode observer. Sensors 2014, 14, 23119–23136. [Google Scholar] [CrossRef] [PubMed]
- Ullah, Z.; Kim, K.-T.; Park, J.-K.; Hur, J. Comparative analysis of scalar and vector control drives of IPMSM under inter-turn fault condition considering nonlinearities. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 366–372. [Google Scholar]
- Gieras, J.F. Permanent Magnet Motor Technology: Design and Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Liu, J.; Zhu, Z. Improved sensorless control of permanent-magnet synchronous machine based on third-harmonic back EMF. IEEE Trans. Ind. Appl. 2014, 50, 1861–1870. [Google Scholar] [CrossRef]
- Ruoho, S.; Kolehmainen, J.; Ikaheimo, J.; Arkkio, A. Demagnetization testing for a mixed-grade dovetail permanent-magnet machine. IEEE Trans. Magn. 2009, 45, 3284–3289. [Google Scholar] [CrossRef]
- Kim, K.-C.; Lim, S.-B.; Koo, D.-H.; Lee, J. The shape design of permanent magnet for permanent magnet synchronous motor considering partial demagnetization. IEEE Trans. Magn. 2006, 42, 3485–3487. [Google Scholar] [CrossRef]
- Hannon, B.; Sergeant, P.; Dupre, L. 2-D analytical subdomain model of a slotted PMSM with shielding cylinder. IEEE Trans. Magn. 2014, 50, 8101410. [Google Scholar] [CrossRef]
- Wang, W.; Yang, F.; Lun, S. The cooling system design and performance analysis of the disc type permanent magnet synchronous motor. In Proceedings of the 2013 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Dongguan, China, 28–30 July 2013; pp. 202–205. [Google Scholar]
- Sjökvist, S.; Eriksson, S.J.E. Investigation of permanent magnet demagnetization in synchronous machines during multiple short-circuit fault conditions. Energies 2017, 10, 1638. [Google Scholar] [CrossRef]
- Kaufhold, M.; Aninger, H.; Berth, M.; Speck, J.; Eberhardt, M. Electrical stress and failure mechanism of the winding insulation in PWM-inverter-fed low-voltage induction motors. IEEE Trans. Ind. Electron. 2000, 47, 396–402. [Google Scholar] [CrossRef]
- Gandhi, A.; Corrigan, T.; Parsa, L. Recent advances in modeling and online detection of stator interturn faults in electrical motors. IEEE Trans. Ind. Electron. 2011, 58, 1564–1575. [Google Scholar] [CrossRef]
- saeid Moosavi, S.; N’Diaye, A.; Djerdir, A.; Amirat, Y.; Khaburi, D.; Yassa, N. Inter-Turn Fault Diagnosis in Permanent Magnet Synchronous Motors—A Review. Int. J. Adv. Inf. Sci. Technol. 2014, 30, 37–43. [Google Scholar]
- Moosavi, S.; Djerdir, A.; Amirat, Y.A.; Khaburi, D. Demagnetization fault diagnosis in permanent magnet synchronous motors: A review of the state-of-the-art. J. Magn. Magn. Mater. 2015, 391, 203–212. [Google Scholar] [CrossRef]
- Faiz, J.; Nejadi-Koti, H. Demagnetization fault indexes in permanent magnet synchronous motors—An overview. IEEE Trans. Magn. 2016, 52, 8201511. [Google Scholar] [CrossRef]
- Dai, M.; Keyhani, A.; Sebastian, T. Fault analysis of a PM brushless DC motor using finite element method. IEEE Trans. Energy Convers. 2005, 20, 1–6. [Google Scholar] [CrossRef]
- Ahmed Farooq, J.; Raminosoa, T.; Djerdir, A.; Miraoui, A. Modelling and simulation of stator winding inter-turn faults in permanent magnet synchronous motors. Int. J. Comput. Math. Electr. Electron. Eng. 2008, 27, 887–896. [Google Scholar] [CrossRef]
- Goktas, T.; Zafarani, M.; Lee, K.W.; Akin, B.; Sculley, T. Comprehensive analysis of magnet defect fault monitoring through leakage flux. IEEE Trans. Magn. 2017, 53, 8201010. [Google Scholar] [CrossRef]
- Zafarani, M.; Goktas, T.; Akin, B.; Fedigan, S.E. An Investigation of Motor Topology Impacts on Magnet Defect Fault Signatures. IEEE Trans. Ind. Electron. 2017, 64, 32–42. [Google Scholar] [CrossRef]
- Zafarani, M.; Goktas, T.; Akin, B. A simplified mathematical approach to model and analyze magnet defects fault signatures in permanent magnet synchronous motors. In Proceedings of the 2015 IEEE Industry Applications Society Annual Meeting, Addison, TX, USA, 18–22 October 2015; pp. 1–6. [Google Scholar]
- Sun, Z.; Wang, J.; Howe, D.; Jewell, G. Analytical prediction of the short-circuit current in fault-tolerant permanent-magnet machines. IEEE Trans. Ind. Electron. 2008, 55, 4210–4217. [Google Scholar]
- Gu, B.-G.; Choi, J.-H.; Jung, I.-S. Development and analysis of interturn short fault model of PMSMs with series and parallel winding connections. IEEE Trans. Power Electron. 2014, 29, 2016–2026. [Google Scholar] [CrossRef]
- Gu, B.-G. Study of IPMSM interturn faults part I: Development and analysis of models with series and parallel winding connections. IEEE Trans. Power Electron. 2016, 31, 5931–5943. [Google Scholar] [CrossRef]
- Chai, J.; Wang, J.; Sun, Z.; Howe, D. Analytical prediction of inter-turn short-circuit current in fault-tolerant permanent magnet brushless machines. In Proceedings of the 2008 4th IET Conference on Power Electronics, Machines and Drives, York, UK, 2–4 April 2008. [Google Scholar]
- Islam, R.; Islam, M.; Tersigni, J.; Sebastian, T. Inter winding short circuit faults in permanent magnet synchronous motors used for high performance applications. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 1291–1298. [Google Scholar]
- Cintron-Rivera, J.G.; Foste, S.N.; Strangas, E.G. Mitigation of turn-to-turn faults in fault tolerant permanent magnet synchronous motors. IEEE Trans. Energy Convers. 2015, 30, 465–475. [Google Scholar] [CrossRef]
- Sarikhani, A.; Mohammed, O.A. Inter-turn fault detection in PM synchronous machines by physics-based back electromotive force estimation. IEEE Trans. Ind. Electron. 2013, 60, 3472–3484. [Google Scholar] [CrossRef]
- Furlani, E.P. Permanent Magnet and Electromechanical Devices: Materials, Analysis, and Applications; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Sjökvist, S. Demagnetization Studies on Permanent Magnets: Comparing FEM Simulations with Experiments. Ph.D. Thesis, Acta Universitatis Upsaliensis, Uppsala, Sweden, 2014. [Google Scholar]
- Hong, J.; Hyun, D.; Lee, S.B.; Yoo, J.-Y.; Lee, K.-W. Automated monitoring of magnet quality for permanent-magnet synchronous motors at standstill. IEEE Trans. Ind. Appl. 2010, 46, 1397–1405. [Google Scholar] [CrossRef]
- Yilmaz, M. Limitations/capabilities of electric machine technologies and modeling approaches for electric motor design and analysis in plug-in electric vehicle applications. Renew. Sustain. Energy Rev. 2015, 52, 80–99. [Google Scholar] [CrossRef]
- Urresty, J.-C.; Riba, J.-R.; Romeral, L.; Garcia, A. A simple 2-D finite-element geometry for analyzing surface-mounted synchronous machines with skewed rotor magnets. IEEE Trans. Magn. 2010, 46, 3948–3954. [Google Scholar] [CrossRef]
- Ruschetti, C.; Verucchi, C.; Bossio, G.; De Angelo, C.; García, G. Rotor demagnetization effects on permanent magnet synchronous machines. Energy Convers. Manag. 2013, 74, 1–8. [Google Scholar] [CrossRef]
- Raminosoa, T.; Farooq, J.; Djerdir, A.; Miraoui, A. Reluctance network modelling of surface permanent magnet motor considering iron nonlinearities. Energy Convers. Manag. 2009, 50, 1356–1361. [Google Scholar] [CrossRef]
- Abbaszadeh, K.; Saied, S.; Hemmati, S.; Tenconi, A. Inverse transform method for magnet defect diagnosis in permanent magnet machines. IET Electr. Power Appl. 2013, 8, 98–107. [Google Scholar] [CrossRef]
- Farooq, J.; Srairi, S.; Djerdir, A.; Miraoui, A. Use of permeance network method in the demagnetization phenomenon modeling in a permanent magnet motor. IEEE Trans. Magn. 2006, 42, 1295–1298. [Google Scholar] [CrossRef]
- Farooq, J.; Djerdir, A.; Miraoui, A. Analytical modeling approach to detect magnet defects in permanent-magnet brushless motors. IEEE Trans. Magn. 2008, 44, 4599–4604. [Google Scholar] [CrossRef]
- Chakraborty, S.; Keller, E.; Ray, A.; Mayer, J. Detection and estimation of demagnetization faults in permanent magnet synchronous motors. Electr. Power Syst. Res. 2013, 96, 225–236. [Google Scholar] [CrossRef]
- Ishikawa, T.; Seki, Y.; Kurita, N. Analysis for fault detection of vector-controlled permanent magnet synchronous motor with permanent magnet defect. IEEE Trans. Magn. 2013, 49, 2331–2334. [Google Scholar] [CrossRef]
- Rosero, J.; Romeral, L.; Cusido, J.; Garcia, A.; Ortega, J. On the short-circuiting fault detection in a PMSM by means of stator current transformations. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference (PESC 2007), Orlando, FL, USA, 17–21 June 2007; pp. 1936–1941. [Google Scholar]
- Otava, L.J.I.-P. Implementation of PMSM inter-turn short fault detection using frequency analysis of stator currents. IFAC-PapersOnLine 2016, 49, 86–91. [Google Scholar] [CrossRef]
- García Espinosa, A.; Rosero García, J.A.; Cusido Roura, J.; Romeral Martínez, J.L.; Ortega Redondo, J.A. Fault detection by means of Hilbert-Huang transform of the stator current in a PMSM with demagnetization. IEEE Trans. Energy Convers. 2010, 25, 312–318. [Google Scholar] [CrossRef]
- Khan, M.A.S.; Rahman, M.A. Development and implementation of a novel fault diagnostic and protection technique for IPM motor drives. IEEE Trans. Ind. Electron. 2009, 56, 85–92. [Google Scholar] [CrossRef]
- Hang, J.; Zhang, J.; Cheng, M.; Wang, Z. Fault diagnosis of mechanical unbalance for permanent magnet synchronous motor drive system under nonstationary condition. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition (ECCE), Denver, CO, USA, 15–19 September 2013; pp. 3556–3562. [Google Scholar]
- Barendse, P.; Pillay, P. A new algorithm for the detection of faults in permanent magnet machines. In Proceedings of the 32nd Annual Conference on IEEE Industrial Electronics (IECON 2006), Paris, France, 6–10 October 2006; pp. 823–828. [Google Scholar]
- Ogidi, O.O.; Barendse, P.S.; Khan, M.A. The detection of interturn short circuit faults in axial-flux permanent magnet machine with concentrated windings. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 1810–1817. [Google Scholar]
- Zhang, C.; Wang, F.; Wang, Z.; Yang, J. Analysis of stator winding inter-turn short circuit fault of PMSM for electric vehicle based on finite element simulation. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–6. [Google Scholar]
- Lee, S.-T.; Hur, J. Detection Technique for Stator Inter-Turn Faults in BLDC Motors Based on Third-Harmonic Components of Line Currents. IEEE Trans. Ind. Appl. 2017, 53, 143–150. [Google Scholar] [CrossRef]
- Çira, F.; Arkan, M.; Gümüş, B. A new approach to detect stator fault in permanent magnet synchronous motors. In Proceedings of the 2015 IEEE 10th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Guarda, Portugal, 1–4 September 2015; pp. 316–321. [Google Scholar]
- Lee, Y.; Habetler, T.G. An on-line stator turn fault detection method for interior PM synchronous motor drives. In Proceedings of the Twenty Second Annual IEEE Applied Power Electronics Conference (APEC 2007), Anaheim, CA, USA, 25 February–1 March 2007; pp. 825–831. [Google Scholar]
- Stavrou, A.; Sedding, H.G.; Penman, J. Current monitoring for detecting inter-turn short circuits in induction motors. IEEE Trans. Energy Convers. 2001, 16, 32–37. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J. Feature extraction for short-circuit fault detection in permanent-magnet synchronous motors using stator-current monitoring. IEEE Trans. Power Electron. 2010, 25, 2673–2682. [Google Scholar] [CrossRef]
- Haylock, J.A.; Mecrow, B.C.; Jack, A.G.; Atkinson, D.J. Operation of fault tolerant machines with winding failures. IEEE Trans. Energy Convers. 1999, 14, 1490–1495. [Google Scholar] [CrossRef]
- Le Roux, W.; Harley, R.G.; Habetler, T.G. Detecting faults in rotors of PM drives. IEEE Ind. Appl. Mag. 2008, 14, 23–31. [Google Scholar] [CrossRef]
- Bakhri, S.; Ertugrul, N.; Soong, W.; Arkan, M. Investigation of negative sequence components for stator shorted turn detection in induction motors. In Proceedings of the 2010 20th Australasian Universities Power Engineering Conference (AUPEC), Christchurch, New Zealand, 5–8 December 2010; pp. 1–6. [Google Scholar]
- Briz, F.; Degner, M.W.; Garcia, P.; Diez, A.B. High-frequency carrier-signal voltage selection for stator winding fault diagnosis in inverter-fed AC machines. IEEE Trans. Ind. Electron. 2008, 55, 4181–4190. [Google Scholar] [CrossRef]
- Vaseghi, B.; Takorabet, N.; Meibody-Tabar, F. Fault analysis and parameter identification of permanent-magnet motors by the finite-element method. IEEE Trans. Magn. 2009, 45, 3290–3295. [Google Scholar] [CrossRef]
- Zanardelli, W.G.; Strangas, E.G.; Aviyente, S. Identification of intermittent electrical and mechanical faults in permanent-magnet AC drives based on time-frequency analysis. IEEE Trans. Ind. Appl. 2007, 43, 971–980. [Google Scholar] [CrossRef]
- Mohammed, O.; Liu, Z.; Liu, S.; Abed, N. Internal short circuit fault diagnosis for PM machines using FE-based phase variable model and wavelets analysis. IEEE Trans. Magn. 2007, 43, 1729–1732. [Google Scholar] [CrossRef]
- Ping, Z.A.; Juan, Y.; Ling, W. Fault detection of stator winding interturn short circuit in PMSM based on wavelet packet analysis. In Proceedings of the 2013 Fifth International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Hong Kong, China, 16–17 January 2013; pp. 566–569. [Google Scholar]
- Mallet, Y.; Coomans, D.; Kautsky, J.; De Vel, O. Classification using adaptive wavelets for feature extraction. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 1058–1066. [Google Scholar] [CrossRef]
- Luo, Z.; Liu, L. Adaptive selection of wavelet basis based on genetic algorithm and its application. In Proceedings of the 2007 Third International Conference on Natural Computation (ICNC 2007), Haikou, China, 24–27 August 2007; pp. 405–409. [Google Scholar]
- Guo, Q.-J.; Yu, H.-B.; Xu, A.-D. An online self-constructing wavelet fuzzy neural network for machine condition monitoring. In Proceedings of the 2005 International Conference on Machine Learning and Cybernetics, Guangzhou, China, 18–21 August 2005; pp. 4193–4200. [Google Scholar]
- Wang, C.; Liu, X.; Chen, Z. Incipient stator insulation fault detection of permanent magnet synchronous wind generators based on Hilbert–Huang transformation. IEEE Trans. Magn. 2014, 50, 8206504. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X. A tour of the tour of the Hilbert-Huang transform: an empirical tool for signal analysis. IEEE Instrum. Meas. Mag. 2007, 10, 40–45. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X. Hilbert–Huang transform-based vibration signal analysis for machine health monitoring. IEEE Trans. Instrum. Meas. 2006, 55, 2320–2329. [Google Scholar] [CrossRef]
- Nyanteh, Y.D.; Srivastava, S.K.; Edrington, C.S.; Cartes, D.A. Application of artificial intelligence to stator winding fault diagnosis in Permanent Magnet Synchronous Machines. Electr. Power Syst. Res. 2013, 103, 201–213. [Google Scholar] [CrossRef]
- Moosavi, S.; Djerdir, A.; Ait-Amirat, Y.; Khaburi, D.A. ANN based fault diagnosis of permanent magnet synchronous motor under stator winding shorted turn. Electr. Power Syst. Res. 2015, 125, 67–82. [Google Scholar] [CrossRef]
- Nyanteh, Y.; Edrington, C.; Srivastava, S.; Cartes, D. Application of artificial intelligence to real-time fault detection in permanent-magnet synchronous machines. IEEE Trans. Ind. Appl. 2013, 49, 1205–1214. [Google Scholar] [CrossRef]
- Cash, M.A.; Habetler, T.G.; Kliman, G.B. Insulation failure prediction in AC machines using line-neutral voltages. IEEE Trans. Ind. Appl. 1998, 34, 1234–1239. [Google Scholar] [CrossRef]
- Urresty, J.-C.; Riba, J.-R.; Delgado, M.; Romeral, L. Detection of demagnetization faults in surface-mounted permanent magnet synchronous motors by means of the zero-sequence voltage component. IEEE Trans. Energy Convers. 2012, 27, 42–51. [Google Scholar] [CrossRef]
- Urresty Betancourt, J.C.; Riba Ruiz, J.-R.; Saavedra Ordóñez, H.; Romeral Martínez, J.L. Detection of inter-turns short circuits in permanent magnet synchronous motors operating under transient conditions by means of the zero sequence voltage. In Proceedings of the 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–9. [Google Scholar]
- Wallmark, O.; Harnefors, L.; Carlson, O. Control algorithms for a fault-tolerant PMSM drive. IEEE Trans. Ind. Electron. 2007, 54, 1973–1980. [Google Scholar] [CrossRef]
- Urresty, J.-C.; Riba, J.-R.; Romeral, L. Diagnosis of interturn faults in PMSMs operating under nonstationary conditions by applying order tracking filtering. IEEE Trans. Power Electron. 2013, 28, 507–515. [Google Scholar] [CrossRef]
- Fan, Y.; Zhu, W.; Zhang, X.; Zhang, L. Stator winding inter-turn short circuit faults severity detection controlled by OW-SVPWM without CMV of five-phase FTFSCW-IPM. In Proceedings of the 2015 18th International Conference on Electrical Machines and Systems (ICEMS), Pattaya, Thailand, 25–28 October 2015; pp. 1192–1197. [Google Scholar]
- Hang, J.; Zhang, J.; Cheng, M.; Huang, J. Online interturn fault diagnosis of permanent magnet synchronous machine using zero-sequence components. IEEE Trans. Power Electron. 2015, 30, 6731–6741. [Google Scholar] [CrossRef]
- van der Geest, M.; Polinder, H.; Ferreira, J.A.; Veltman, A.; Wolmarans, J.J.; Tsiara, N. Analysis and neutral voltage-based detection of interturn faults in high-speed permanent-magnet machines with parallel strands. IEEE Trans. Ind. Electron. 2015, 62, 3862–3873. [Google Scholar]
- Chen, Y.; Chen, X.; Shen, Y.J.E. On-Line Detection of Coil Inter-Turn Short Circuit Faults in Dual-Redundancy Permanent Magnet Synchronous Motors. Energies 2018, 11, 662. [Google Scholar] [CrossRef]
- Boileau, T.; Leboeuf, N.; Nahid-Mobarakeh, B.; Meibody-Tabar, F. Synchronous demodulation of control voltages for stator interturn fault detection in PMSM. IEEE Trans. Power Electron. 2013, 28, 5647–5654. [Google Scholar] [CrossRef]
- Awadallah, M.A.; Morcos, M.M.; Gopalakrishnan, S.; Nehl, T.W. Detection of stator short circuits in VSI-fed brushless DC motors using wavelet transform. IEEE Trans. Energy Convers. 2006, 21, 1–8. [Google Scholar] [CrossRef]
- Khov, M.; Regnier, J.; Faucher, J. Detection of turn short-circuit faults in stator of PMSM by on-line parameter estimation. In Proceedings of the 2008 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM 2008), Ischia, Italy, 11–13 June 2008; pp. 161–166. [Google Scholar]
- Khov, M.; Regnier, J.; Faucher, J. Monitoring of turn short-circuit faults in stator of PMSM in closed loop by on-line parameter estimation. In Proceedings of the IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED 2009), Cargese, France, 31 August–3 September 2009; pp. 1–6. [Google Scholar]
- Hsieh, C.-T.; Yau, H.-T.; Shiu, J. Diagnosis of short-circuit fault in large-scale permanent-magnet wind power generator based on CMAC. Math. Probl. Eng. 2013, 2013, 935048. [Google Scholar] [CrossRef]
- Yang, J.-W.; Dou, M.-F.; Dai, Z.-Y. Modeling and fault diagnosis of interturn short circuit for five-phase permanent magnet synchronous motor. J. Electr. Comput. Eng. 2015, 2015, 168786. [Google Scholar] [CrossRef]
- Du, B.; Wu, S.; Han, S.; Cui, S. Interturn fault diagnosis strategy for interior permanent-magnet synchronous motor of electric vehicles based on digital signal processor. IEEE Trans. Ind. Electron. 2016, 63, 1694–1706. [Google Scholar] [CrossRef]
- Pradhan, S.K.; Srivastava, R.K. Characterstics of stator inductances with intertum fault in PMBLDC motor using winding function approach. In Proceedings of the 2013 IEEE 1st International Conference on Condition Assessment Techniques in Electrical Systems (CATCON), Kolkata, India, 6–8 December 2013; pp. 139–144. [Google Scholar]
- Haddad, R.Z.; Strangas, E.G. Detection of static eccentricity and turn-to-turn short circuit faults in permanent magnet synchronous AC machines. In Proceedings of the 2015 IEEE 10th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Guarda, Portugal, 1–4 September 2014; pp. 277–283. [Google Scholar]
- Wang, L.; Li, Y.; Li, J. Diagnosis of inter-turn short circuit of synchronous generator rotor winding based on volterra kernel identification. Energies 2018, 11, 2524. [Google Scholar] [CrossRef]
- Kim, K.-T.; Park, J.-K.; Hur, J.; Kim, B.-W. Comparison of the fault characteristics of IPM-type and SPM-type BLDC motors under inter-turn fault conditions using winding function theory. IEEE Trans. Ind. Appl. 2014, 50, 986–994. [Google Scholar] [CrossRef]
- Kim, K.-T.; Hur, J.; Kang, G.-H. Inter-turn fault analysis of IPM type BLDC motor using fault impedance modeling. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 2216–2224. [Google Scholar]
- Park, J.-K.; Jeong, C.-L.; Lee, S.-T.; Hur, J. Early detection technique for stator winding inter-turn fault in BLDC motor using input impedance. IEEE Trans. Ind. Appl. 2015, 51, 240–247. [Google Scholar] [CrossRef]
- Qi, Y.; Zafarani, M.; Akin, B.; Fedigan, S.E. Analysis and detection of inter-turn short-circuit fault through extended self-commissioning. IEEE Trans. Ind. Appl. 2017, 53, 2730–2739. [Google Scholar] [CrossRef]
- Leboeuf, N.; Boileau, T.; Nahid-Mobarakeh, B.; Takorabet, N.; Meibody-Tabar, F.; Clerc, G. Estimating permanent-magnet motor parameters under inter-turn fault conditions. IEEE Trans. Magn. 2012, 48, 963–966. [Google Scholar] [CrossRef]
- Leboeuf, N.; Boileau, T.; Nahid-Mobarakeh, B.; Takorabet, N.; Meibody-Tabar, F.; Clerc, G. Inductance calculations in PM motors under fault conditions. IEEE Trans. Magn 2012, 48, 2605–2616. [Google Scholar] [CrossRef]
- Vaseghi, B.; Nahid-Mobarakh, B.; Takorabet, N.; Meibody-Tabar, F. Inductance identification and study of PM motor with winding turn short circuit fault. IEEE Trans. Magn. 2011, 47, 978–981. [Google Scholar] [CrossRef]
- Mohammed, O.; Liu, S.; Liu, Z. FE-based physical phase variable model of PM synchronous machines under stator winding short circuit faults. IET Sci. Meas. Technol. 2007, 1, 12–16. [Google Scholar] [CrossRef]
- Tang, W.; Liu, G.; Ji, J. Winding turn-to-turn faults detection of five-phase fault-tolerant permanent-magnet machine based on parametric model. In Proceedings of the 2012 15th International Conference on Electrical Machines and Systems (ICEMS), Sapporo, Japan, 21–24 October 2015; pp. 1–6. [Google Scholar]
- Arellano-Padilla, J.; Sumner, M.; Gerada, C. On-line detection of stator winding short-circuit faults in a PM machine using HF signal injection. In Proceedings of the 2008 18th International Conference on Electrical Machines (ICEM 2008), Vilamoura, Portugal, 6–9 September 2008; pp. 1–8. [Google Scholar]
- Arellano-Padilla, J.; Sumner, M.; Gerada, C. Winding condition monitoring scheme for a permanent magnet machine using high-frequency injection. IET Electr. Power Appl. 2011, 5, 89–99. [Google Scholar] [CrossRef]
- Yang, S.-C. Online turn fault detection of interior permanent-magnet machines using the pulsating-type voltage injection. IEEE Trans. Ind. Appl. 2016, 52, 2340–2349. [Google Scholar] [CrossRef]
- Arellano-Padilla, J.; Sumner, M.; Gerada, C. Condition monitoring approach for permanent magnet synchronous motor drives based on the INFORM method. IET Electr. Power Appl. 2016, 10, 54–62. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Moon, S.; Jeong, H.; Kim, S.W. Robust diagnosis method based on parameter estimation for an interturn short-circuit fault in multipole PMSM under high-speed operation. Sensors 2015, 15, 29452–29466. [Google Scholar] [CrossRef]
- Şimşir, M.; Bayır, R.; Uyaroğlu, Y. Real-time monitoring and fault diagnosis of a low power hub motor using feedforward neural network. Comput. Intell. Neurosci. 2016, 2016, 7129376. [Google Scholar] [CrossRef]
- Penman, J.; Sedding, H.; Lloyd, B.; Fink, W. Detection and location of interturn short circuits in the stator windings of operating motors. IEEE Trans. Energy Convers. 1994, 9, 652–658. [Google Scholar] [CrossRef]
- Lee, S.-T.; Kim, K.-T.; Hur, J. Diagnosis technique for stator winding inter-turn fault in BLDC motor using detection coil. In Proceedings of the 2015 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 2925–2931. [Google Scholar]
- Chai, J.; Wang, J.; Atallah, K.; Howe, D. Performance comparison and winding fault detection of duplex 2-phase and 3-phase fault-tolerant permanent magnet brushless machines. In Proceedings of the 2007 IEEE Industry Applications Annual Meeting, New Orleans, LA, USA, 23–27 September 2007; pp. 566–572. [Google Scholar]
- Da, Y.; Shi, X.; Krishnamurthy, M. A new approach to fault diagnostics for permanent magnet synchronous machines using electromagnetic signature analysis. IEEE Trans. Power Electron. 2013, 28, 4104–4112. [Google Scholar] [CrossRef]
- Liang, H.; Chen, Y.; Liang, S.; Wang, C. Fault Detection of Stator Inter-Turn Short-Circuit in PMSM on Stator Current and Vibration Signal. Appl. Sci. 2018, 8, 1677. [Google Scholar] [CrossRef]
- Li, Y.; Chai, F.; Song, Z.; Li, Z. Analysis of Vibrations in Interior Permanent Magnet Synchronous Motors Considering Air-Gap Deformation. Energies 2017, 10, 1259. [Google Scholar] [CrossRef]
- Ojeda, J.; Boisson, J.; Gabsi, M. 5-phase flux switching machine insulation failure detection using vibration monitoring. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 1039–1043. [Google Scholar]
- Yang, Z.; Shi, X.; Krishnamurthy, M. Vibration monitoring of PM synchronous machine with partial demagnetization and inter-turn short circuit faults. In Proceedings of the 2014 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 15–18 June 2014; pp. 1–6. [Google Scholar]
- Boileau, T.; Nahid-Mobarakeh, B.; Meibody-Tabar, F. Back-EMF based detection of stator winding inter-turn fault for PM synchronous motor drives. In Proceedings of the 2007 IEEE Vehicle Power and Propulsion Conference (VPPC 2007), Arlington, TX, USA, 9–12 September 2007; pp. 95–100. [Google Scholar]
- Salim, G.; Ouadie, B.; Ghaleb, H. Vibro-acoustic fault detection and diagnosis in hybrid electric vehicle. In Proceedings of the 2013 Fourth International Conference on Power Engineering, Energy and Electrical Drives (POWERENG), Istanbul, Turkey, 13–17 May 2013; pp. 309–313. [Google Scholar]
- Rajagopalan, S.; le Roux, W.; Habetler, T.G.; Harley, R.G. Dynamic eccentricity and demagnetized rotor magnet detection in trapezoidal flux (brushless DC) motors operating under different load conditions. IEEE Trans. Power Electron. 2007, 22, 2061–2069. [Google Scholar] [CrossRef]
- Le Roux, W.; Harley, R.G.; Habetler, T.G. Detecting rotor faults in low power permanent magnet synchronous machines. IEEE Trans. Power Electron. 2007, 22, 322–328. [Google Scholar] [CrossRef]
- Goktas, T.; Zafarani, M.; Akin, B. Discernment of broken magnet and static eccentricity faults in permanent magnet synchronous motors. IEEE Trans. Energy Convers. 2016, 31, 578–587. [Google Scholar] [CrossRef]
- Zafarani, M.; Goktas, T.; Akin, B. A comprehensive analysis of magnet defect faults in permanent magnet synchronous motors. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 2779–2783. [Google Scholar]
- Pons-Llinares, J.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Lee, S.B.; Kang, T.-j.; Yang, C. Advanced induction motor rotor fault diagnosis via continuous and discrete time–frequency tools. IEEE Trans. Ind. Electron. 2015, 62, 1791–1802. [Google Scholar] [CrossRef]
- Rajagopalan, S.; Restrepo, J.A.; Aller, J.M.; Habetler, T.; Harley, R. Wigner-Ville distributions for detection of rotor faults in brushless DC (BLDC) motors operating under non-stationary conditions. In Proceedings of the 5th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED 2005), Vienna, Austria, 7–9 September 2005; pp. 1–7. [Google Scholar]
- Strangas, E.G.; Aviyente, S.; Zaidi, S.S.H. Time–frequency analysis for efficient fault diagnosis and failure prognosis for interior permanent-magnet AC motors. IEEE Trans. Ind. Electron. 2008, 55, 4191–4199. [Google Scholar] [CrossRef]
- Ruiz, J.-R.R.; Rosero, J.A.; Espinosa, A.G.; Romeral, L. Detection of demagnetization faults in permanent-magnet synchronous motors under nonstationary conditions. IEEE Trans. Magn. 2009, 45, 2961–2969. [Google Scholar] [CrossRef]
- Climente-Alarcon, V.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Vlcek, M. Induction motor diagnosis by advanced notch FIR filters and the Wigner–Ville distribution. IEEE Trans. Ind. Electron. 2014, 61, 4217–4227. [Google Scholar] [CrossRef]
- Gritli, Y.; Rossi, C.; Casadei, D.; Zarri, L.; Filippetti, F. Demagnetizations diagnosis for permanent magnet synchronous motors based on advanced wavelet analysis. In Proceedings of the 2012 XXth International Conference on Electrical Machines (ICEM), Marseille, France, 2–5 September 2012; pp. 2397–2403. [Google Scholar]
- Casadei, D.; Filippetti, F.; Rossi, C.; Stefani, A. Magnets faults characterization for permanent magnet synchronous motors. In Proceedings of the IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED 2009), Cargese, France, 31 August–3 September 2009; pp. 1–6. [Google Scholar]
- Ishikawa, T.; Igarashi, N.; Kurita, N. Failure Diagnosis for Demagnetization in Interior Permanent Magnet Synchronous Motors. Int. J. Rotat. Mach. 2017, 2017, 2716814. [Google Scholar] [CrossRef]
- Kim, H.-K.; Kang, D.-H.; Hur, J. Fault detection of irreversible demagnetization based on space harmonics according to equivalent magnetizing distribution. IEEE Trans. Magn. 2015, 51, 8109304. [Google Scholar] [CrossRef]
- Casadei, D.; Mengoni, M.; Serra, G.; Tani, A.; Zarri, L. Behavior of a five-phase surface-mounted permanent magnet motor under magnet demagnetization. In Proceedings of the 2011 IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics & Drives (SDEMPED), Bologna, Italy, 5–8 September 2011; pp. 265–271. [Google Scholar]
- Shen, J.; Zhu, Z.; Howe, D. Sensorless flux-weakening control of permanent-magnet brushless machines using third harmonic back EMF. IEEE Trans. Ind. Appl. 2004, 40, 1629–1636. [Google Scholar] [CrossRef]
- Urresty, J.; Riba, J.-R.; Romeral, L. A back-emf based method to detect magnet failures in PMSMs. IEEE Trans. Magn 2013, 49, 591–598. [Google Scholar] [CrossRef]
- Welchko, B.A.; Lipo, T.A.; Jahns, T.M.; Schulz, S.E. Fault tolerant three-phase AC motor drive topologies: a comparison of features, cost, and limitations. IEEE Trans. Power Electron. 2004, 19, 1108–1116. [Google Scholar] [CrossRef] [Green Version]
- Gaeid, K.S.; Ping, H.W.; Khalid, M.; Masaoud, A. Sensor and sensorless fault tolerant control for induction motors using a wavelet index. Sensors 2012, 12, 4031–4050. [Google Scholar] [CrossRef] [PubMed]
- Kim, B.; Lee, K.; Yang, J.; Lee, S.B.; Wiedenbrug, E.J.; Shah, M.R. Automated detection of rotor faults for inverter-fed induction machines under standstill conditions. IEEE Trans. Ind. Appl. 2011, 47, 55–64. [Google Scholar] [CrossRef]
- Hong, J.; Park, S.; Hyun, D.; Kang, T.-j.; Lee, S.B.; Kral, C.; Haumer, A. Detection and classification of rotor demagnetization and eccentricity faults for PM synchronous motors. IEEE Trans. Ind. Appl. 2012, 48, 923–932. [Google Scholar] [CrossRef]
- Reigosa, D.; Fernandez, D.; Zhu, Z.-Q.; Briz, F. PMSM magnetization state estimation based on stator-reflected PM resistance using high frequency signal injection. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 1729–1736. [Google Scholar]
- Reigosa, D.; Fernández, D.; Park, Y.; Diez, A.B.; Lee, S.B.; Briz, F. Detection of demagnetization in permanent magnet synchronous machines using hall-effect sensors. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 4686–4693. [Google Scholar]
- De Bisschop, J.; Abdallh, A.; Sergeant, P.; Dupré, L. Identification of demagnetization faults in axial flux permanent magnet synchronous machines using an inverse problem coupled with an analytical model. IEEE Trans. Magn. 2014, 50, 8104804. [Google Scholar] [CrossRef]
- Lee, J.; Jeon, Y.-J.; Choi, D.-C.; Kim, S.; Kim, S.W. Demagnetization fault diagnosis method for PMSM of electric vehicle. In Proceedings of the 39th Annual Conference of the IEEE Industrial Electronics Society (IECON 2013), Vienna, Austria, 10–13 November 2013; pp. 2709–2713. [Google Scholar]
- Khoobroo, A.; Fahimi, B. A novel method for permanent magnet demagnetization fault detection and treatment in permanent magnet synchronous machines. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 2231–2237. [Google Scholar]
- Urresty, J.-C.; Atashkhooei, R.; Riba, J.-R.; Romeral, L.; Royo, S. Shaft trajectory analysis in a partially demagnetized permanent-magnet synchronous motor. IEEE Trans. Ind. Electron. 2013, 60, 3454–3461. [Google Scholar] [CrossRef]
- Torregrossa, D.; Khoobroo, A.; Fahimi, B. Prediction of acoustic noise and torque pulsation in PM synchronous machines with static eccentricity and partial demagnetization using field reconstruction method. IEEE Trans. Ind. Electron. 2012, 59, 934–944. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J. Demagnetization fault diagnosis in surface mounted permanent magnet synchronous motors. IEEE Trans. Magn. 2013, 49, 1185–1192. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Machine Type | Scheme | Ref. | Fault Identification | Online/Offline | Invasive/Noninvasive | Sensitivity | Fault Severity | ABOFN |
|---|---|---|---|---|---|---|---|---|---|
| Stator Current | BLDC PMSM | MCSA | [45] | No | On | Non | L | Might be | No |
| Neg. | [56,57] | No | On | Inv | M | Yes | No | ||
| sequence | [56] | No | On | Non | H | No | Yes | ||
| Overshoot | [71] | No | On | Non | VH | No | No | ||
| SM PMSM | di/dt (ANN) | [59] | No | Off | Non | M | No | No | |
| STFT | [63] | No | On | Non | H | No | No | ||
| WT HHT | [65,66] | No | On | Non | H | No | No | ||
| Voltage/BEMF | PMSM | ZSVC | [76] | No | On | Inv | M | Yes | yes |
| Asymmetry | [53] | No | On | Non | H | No | Yes | ||
| Park Vector | [83,84] | No | On | Non | H | No | Yes | ||
| BLDC SPMSM | WT | [84] | No | On | Non | M | No | Yes | |
| VKF-OT | [76] | Yes | On | Non | H | No | yes | ||
| BEMF | [30] | No | On | Inv | M | Yes | yes | ||
| BLDC | WFT | [88] | No | On | Non | H | No | Yes | |
| Parameters Estimation | PMSM BLDC | Inductance | [89] | yes | on | Non | M | yes | No |
| Resistance | [58] | No | On | Non | H | No | Yes | ||
| Impedance | [92] | yes | On | Non | L | Yes | Yes | ||
| Magnetic Flux | BLDC | Search coil | [107] | No | On | Inv | H | No | No |
| [108] | No | On | Inv | H | No | No | |||
| SM | Leakage flux | [106] | yes | On | Inv | VH | No | No | |
| Mechanical outputs | PMSM | Vibrations | [112] | yes | On | Inv | L | No | Yes |
| Acoustic Noise | [115] | yes | On | Inv | M | No | No |
| Index | Machine Type | Scheme | Ref. | PD | UD | Inv/Noninv | Sensitivity | On/Offline | ABOFN | Fault Severity | Multi Fault |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Stator Current | PMSM BLDC | MCSA | [116] | Yes | No | Non | VH | On | Yes | Yes | Yes |
| WT | [123] | Yes | No | Non | H | On | No | No | No | ||
| HHT | [45] | Yes | No | Non | H | On | No | No | No | ||
| Voltage/BEMF | BLDC PMSM BLDC | ZSVC | [131] | Yes | No | Inv | H | On | Yes | Yes | No |
| Direct BEMF | [126] | Yes | No | Non | M | Off | Yes | Yes | No | ||
| Indirect BEMF | [128] | Yes | No | Non | L | On | Yes | No | No | ||
| Parameters Estimation | BLDC PMSM | Signal injection | [31] | Yes | Yes | Inv | H | Off | No | No | No |
| Ld variation | [135] | Inv | VH | Off | No | Yes | Yes | ||||
| Impedance | [132] | Inv | H | Off | Yes | No | |||||
| Resistance | [136] | Inv | H | Off | Yes | Yes | No | ||||
| Magnetic Signals | BLDC PMSM | Hall sensor | [137] | Yes | Yes | Inv | VH | On | Yes | No | No |
| Gaussmeter | [31] | Yes | Yes | Inv | H | Off | No | No | No | ||
| Search coil | [109] | Yes | Yes | Inv | H | On | No | Yes | Yes | ||
| Mechanical outputs | PMSM | Torque ripple | [143] | Yes | Yes | Non | H | On | Yes | No | No |
| Acoustic Noise | [142] | Yes | No | Inv | VH | On | Yes | No | Yes |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ullah, Z.; Hur, J. A Comprehensive Review of Winding Short Circuit Fault and Irreversible Demagnetization Fault Detection in PM Type Machines. Energies 2018, 11, 3309. https://doi.org/10.3390/en11123309
Ullah Z, Hur J. A Comprehensive Review of Winding Short Circuit Fault and Irreversible Demagnetization Fault Detection in PM Type Machines. Energies. 2018; 11(12):3309. https://doi.org/10.3390/en11123309
Chicago/Turabian StyleUllah, Zia, and Jin Hur. 2018. "A Comprehensive Review of Winding Short Circuit Fault and Irreversible Demagnetization Fault Detection in PM Type Machines" Energies 11, no. 12: 3309. https://doi.org/10.3390/en11123309
APA StyleUllah, Z., & Hur, J. (2018). A Comprehensive Review of Winding Short Circuit Fault and Irreversible Demagnetization Fault Detection in PM Type Machines. Energies, 11(12), 3309. https://doi.org/10.3390/en11123309