Autonomous Control Strategy of DC Microgrid for Islanding Mode Using Power Line Communication




Abstract
:1. Introduction
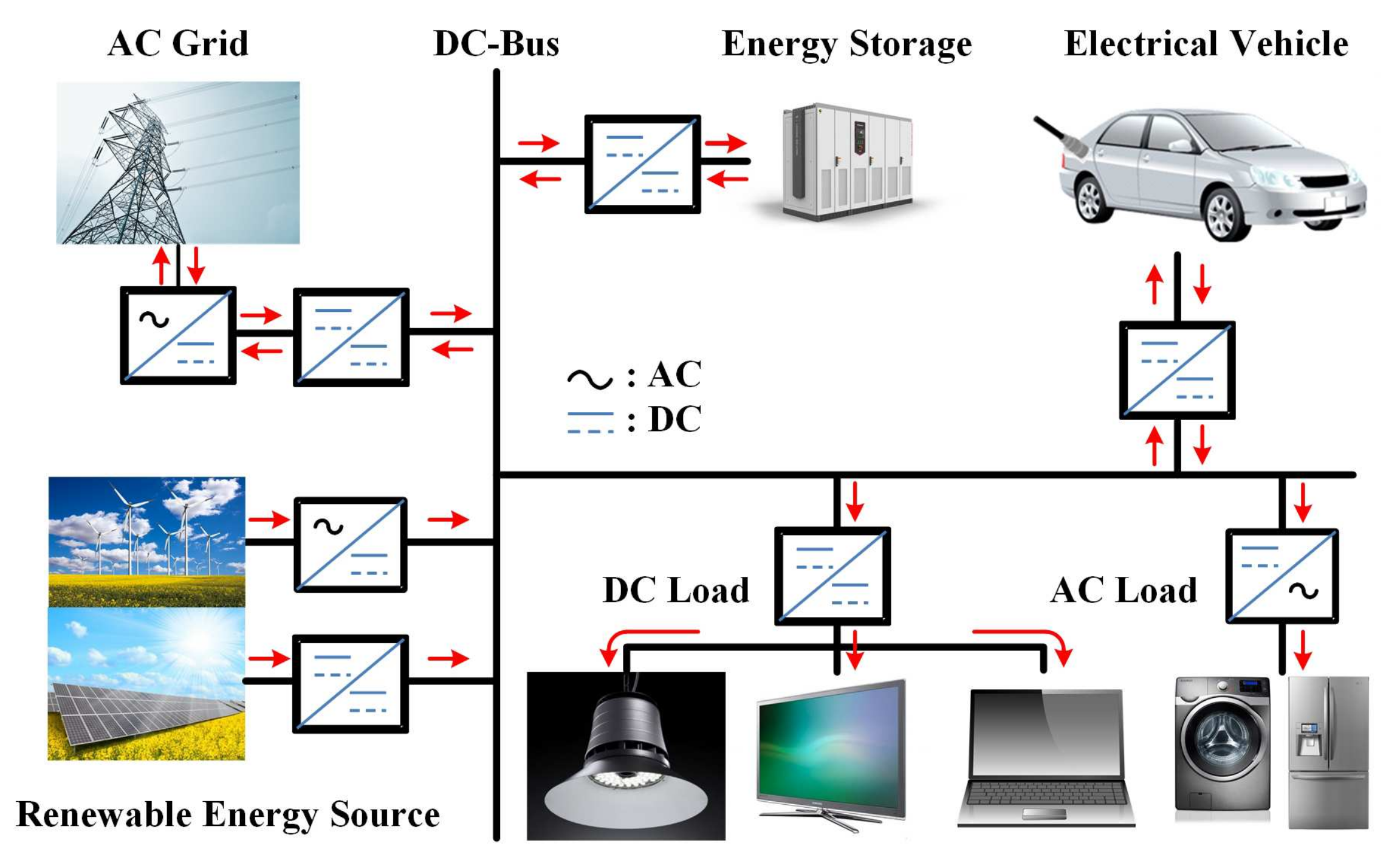
2. Configuration of DC Microgrid
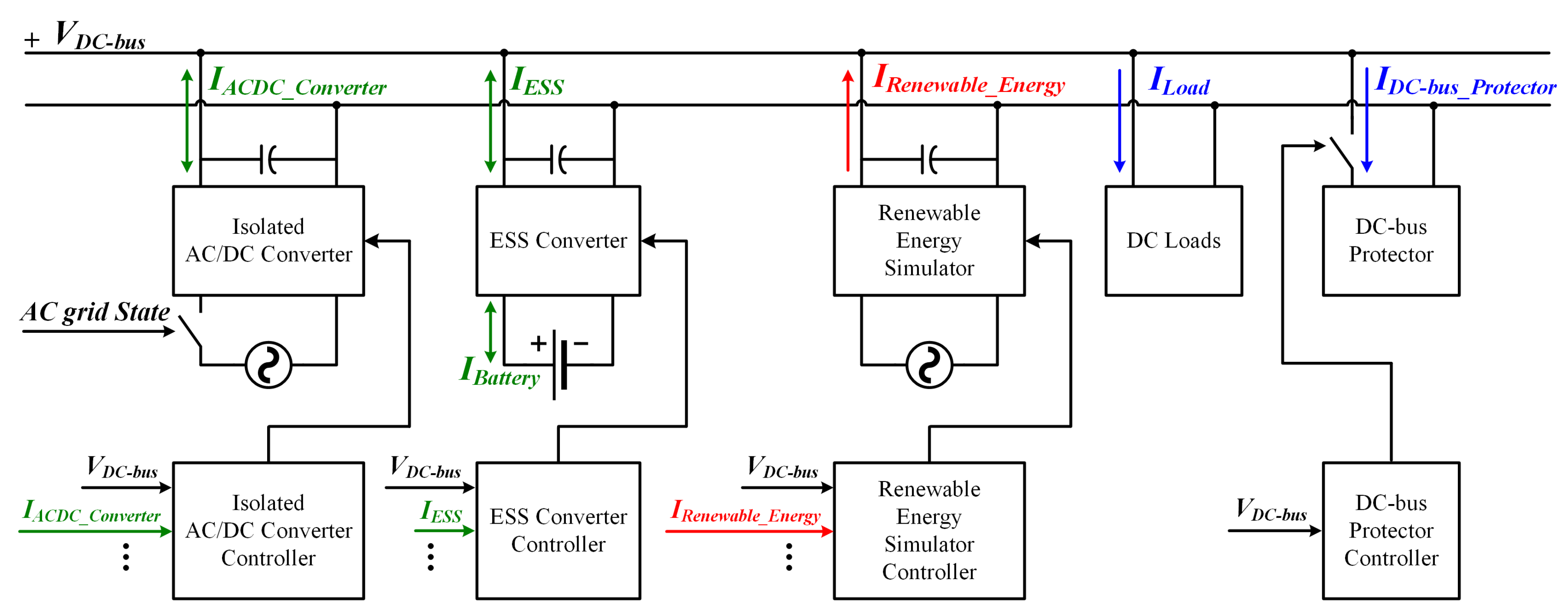
2.1. DC Microgrid Structure
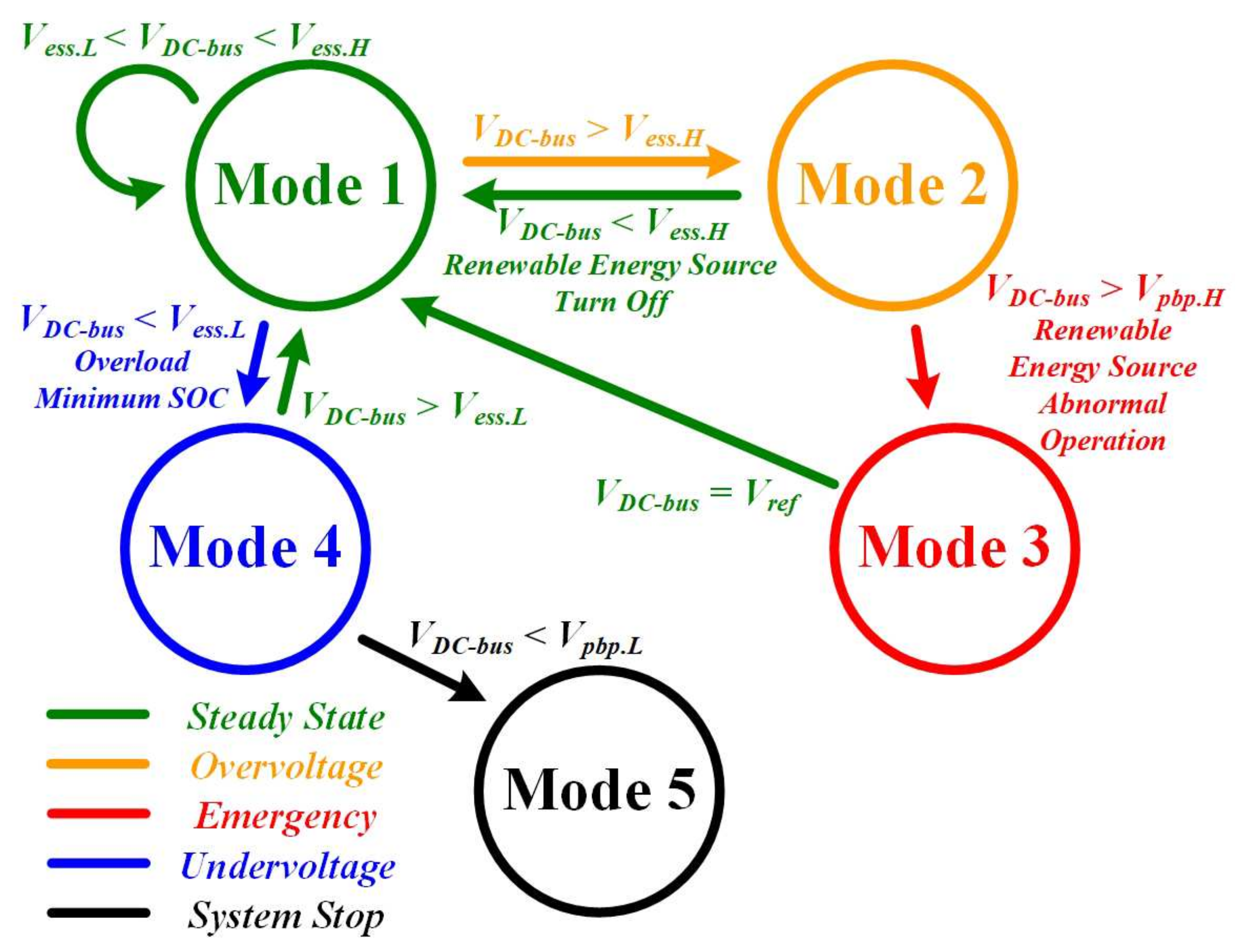
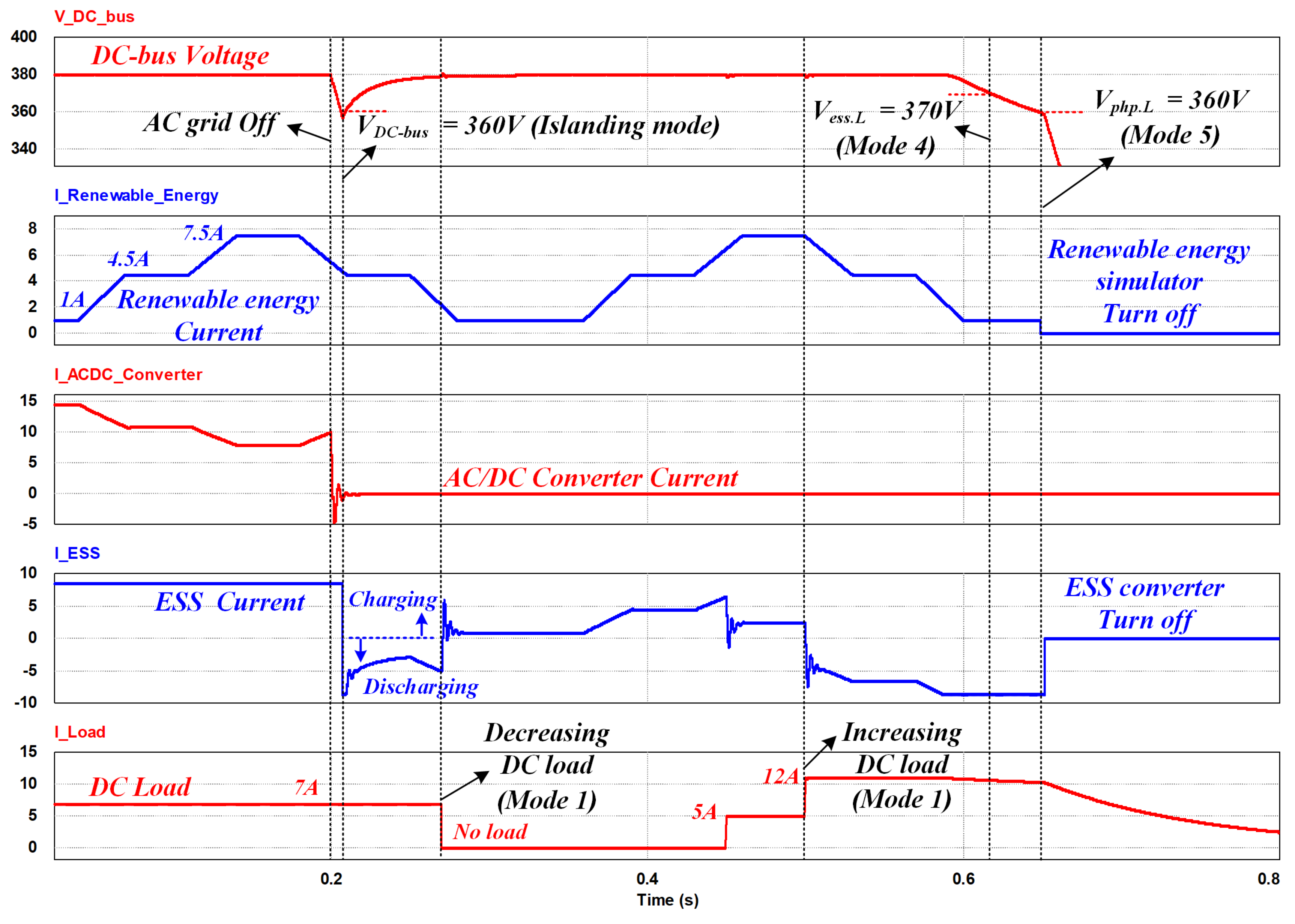
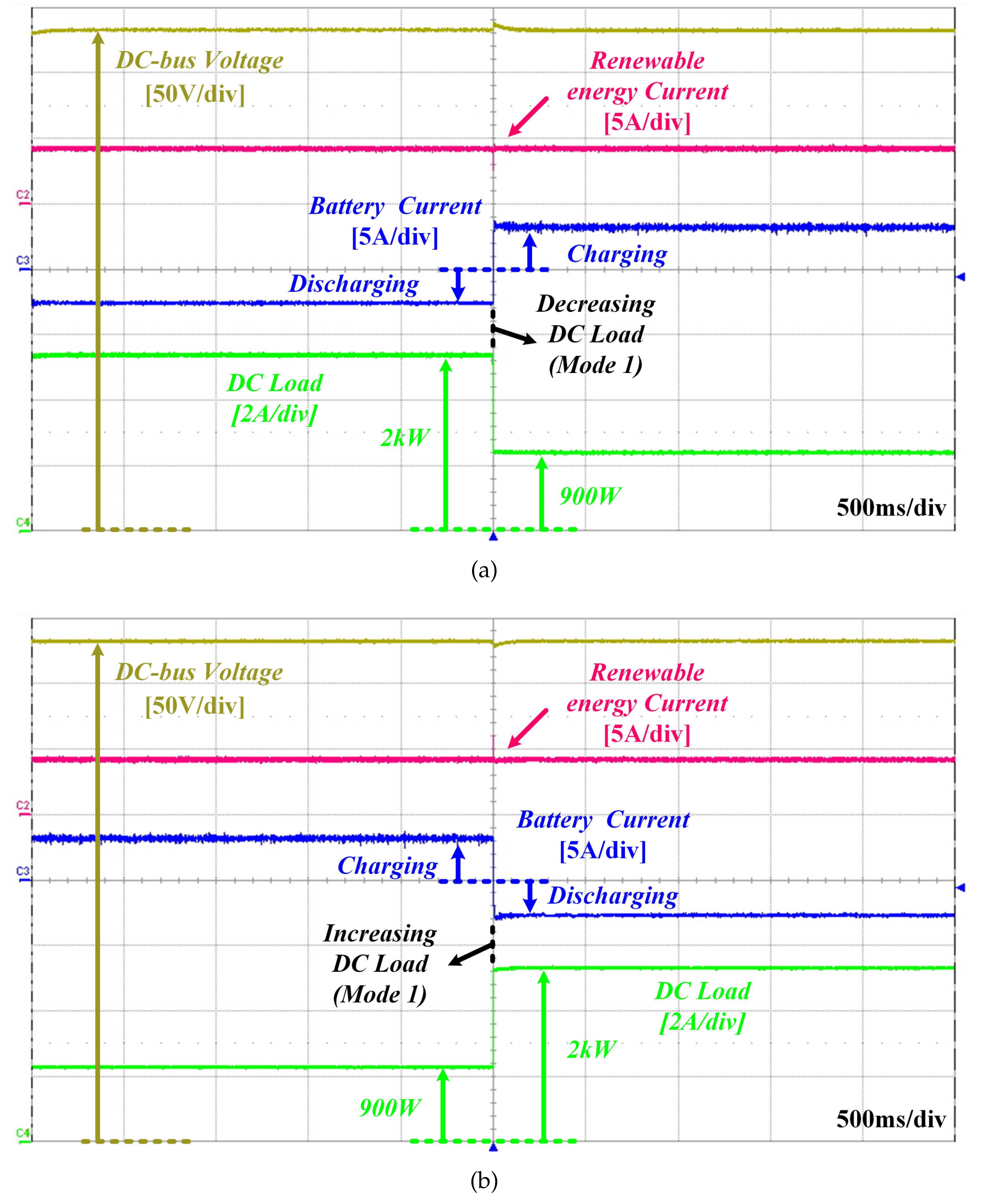
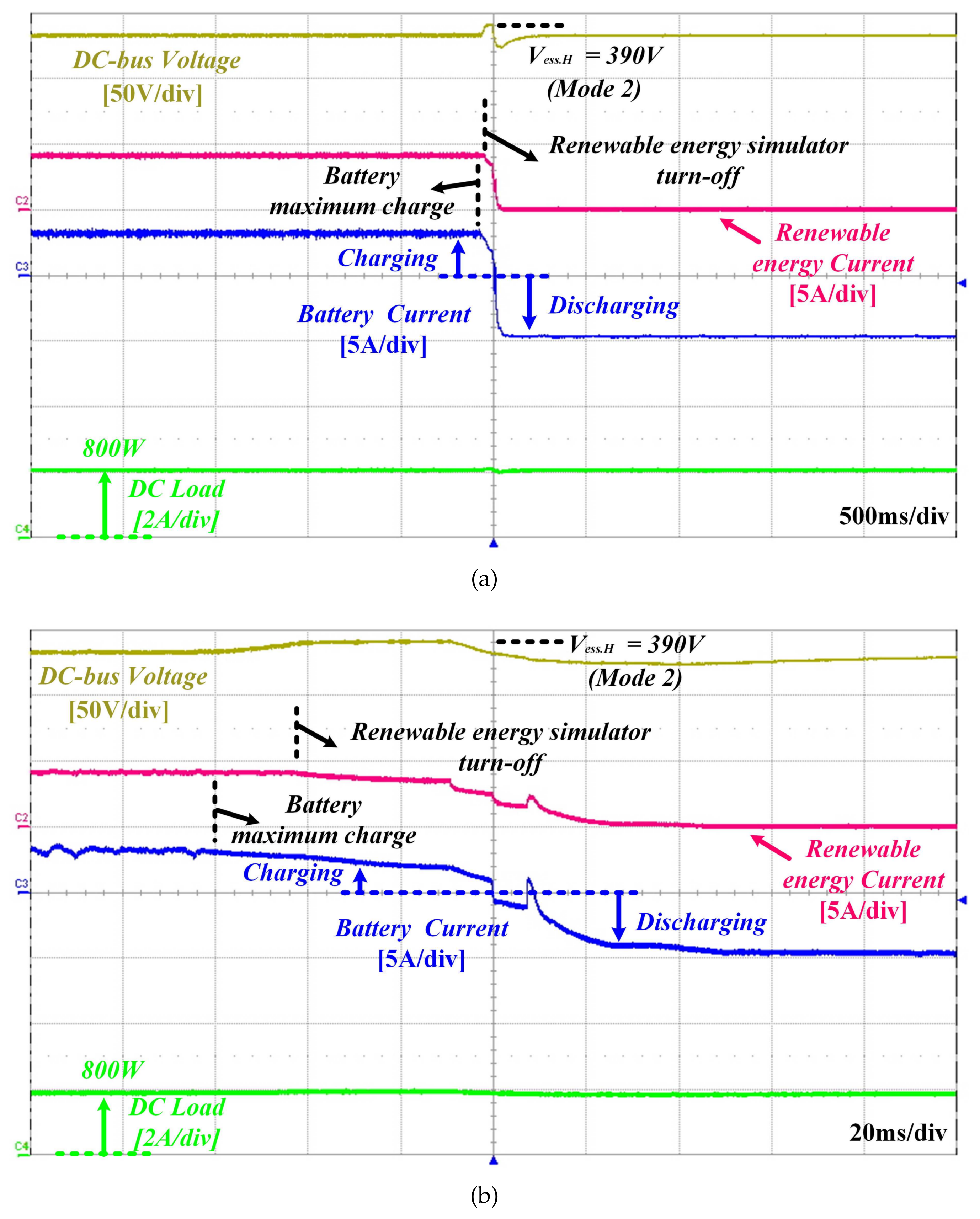
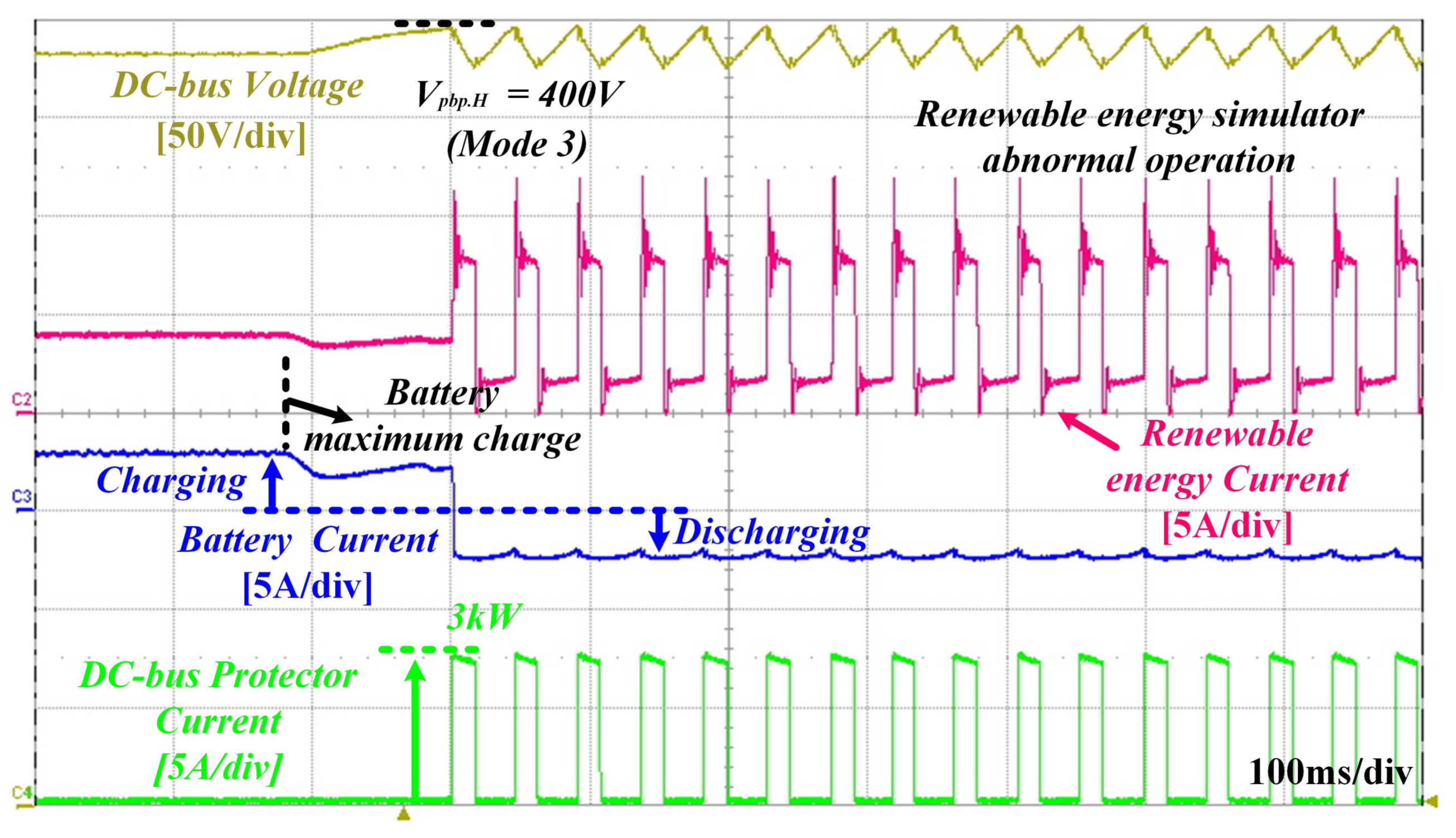
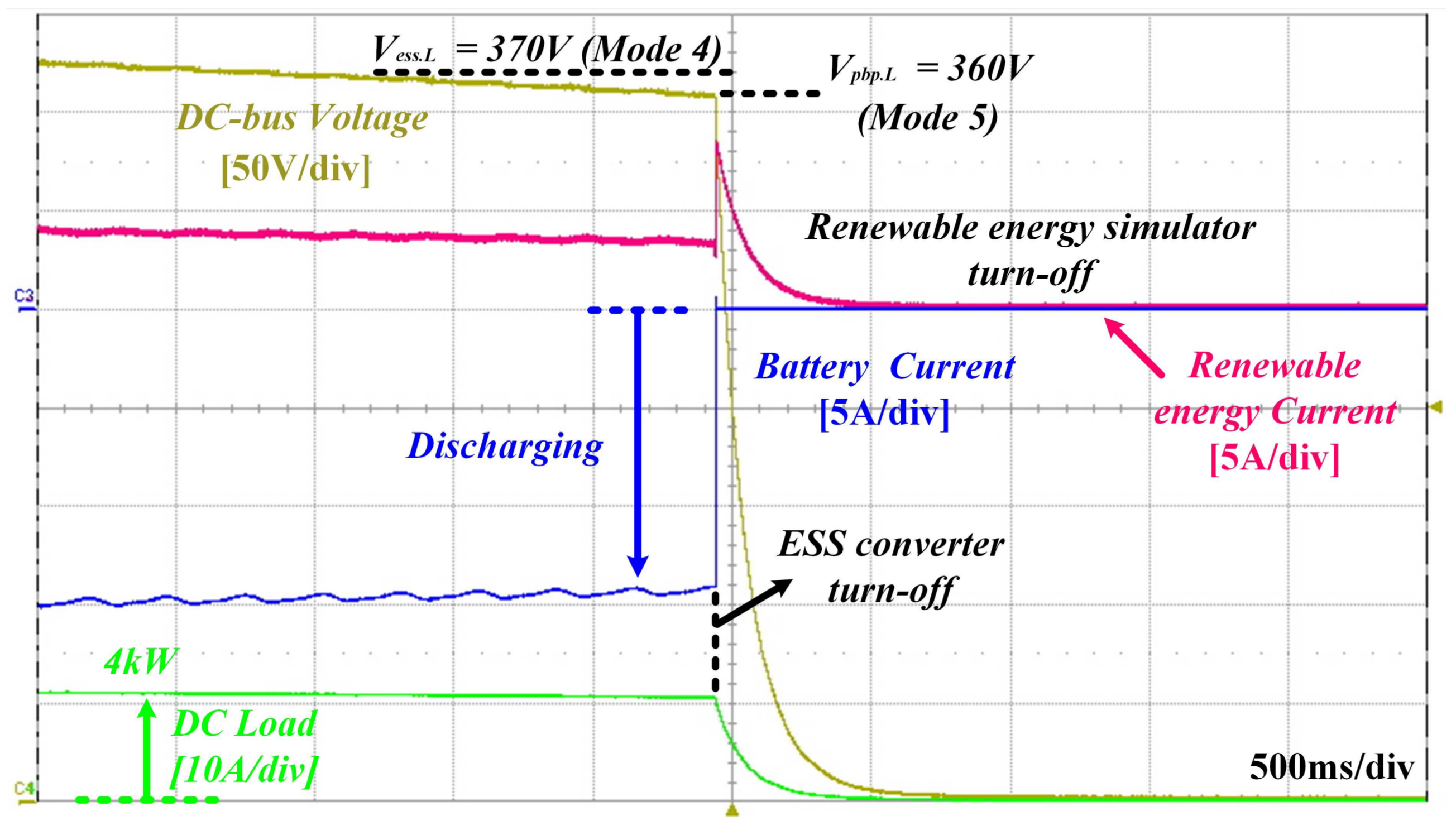
2.2. Operating Mode
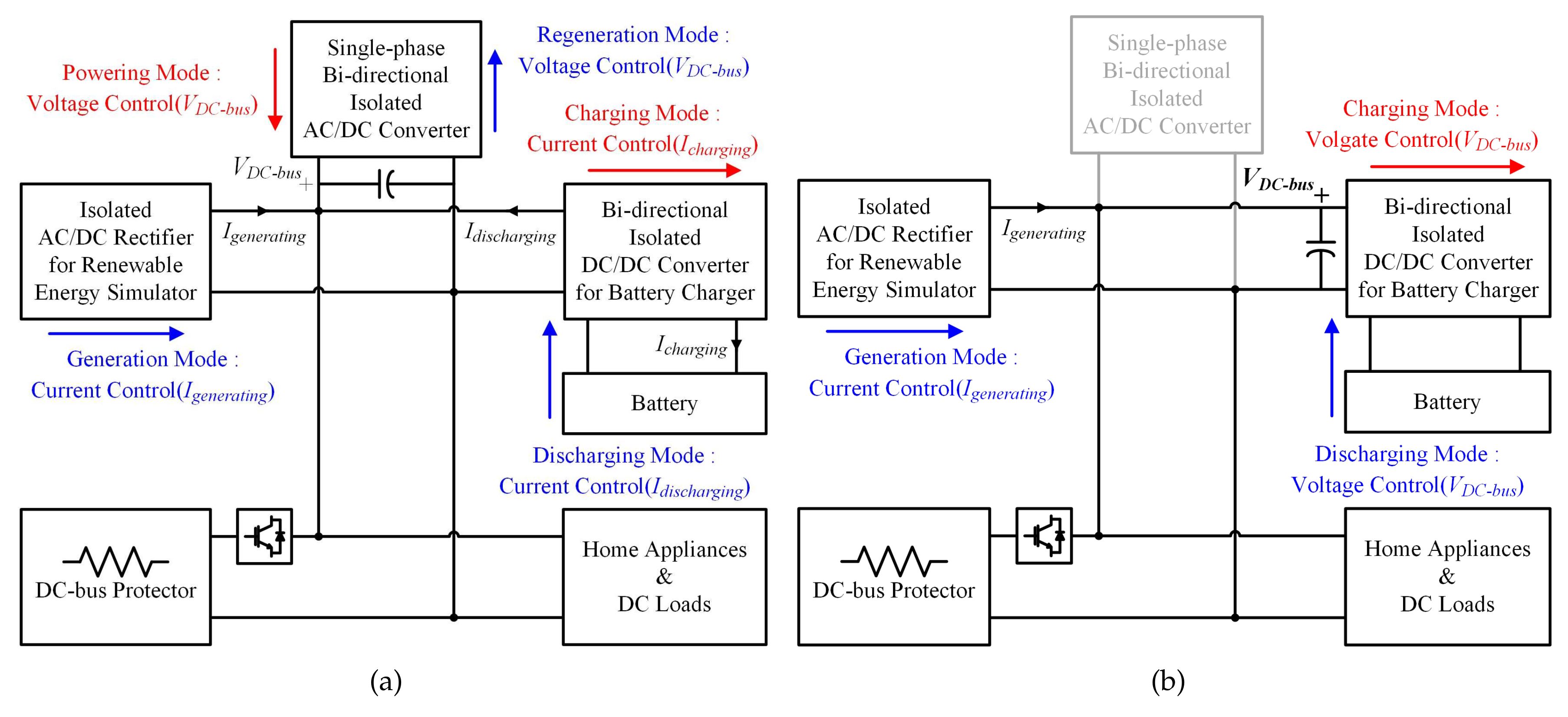
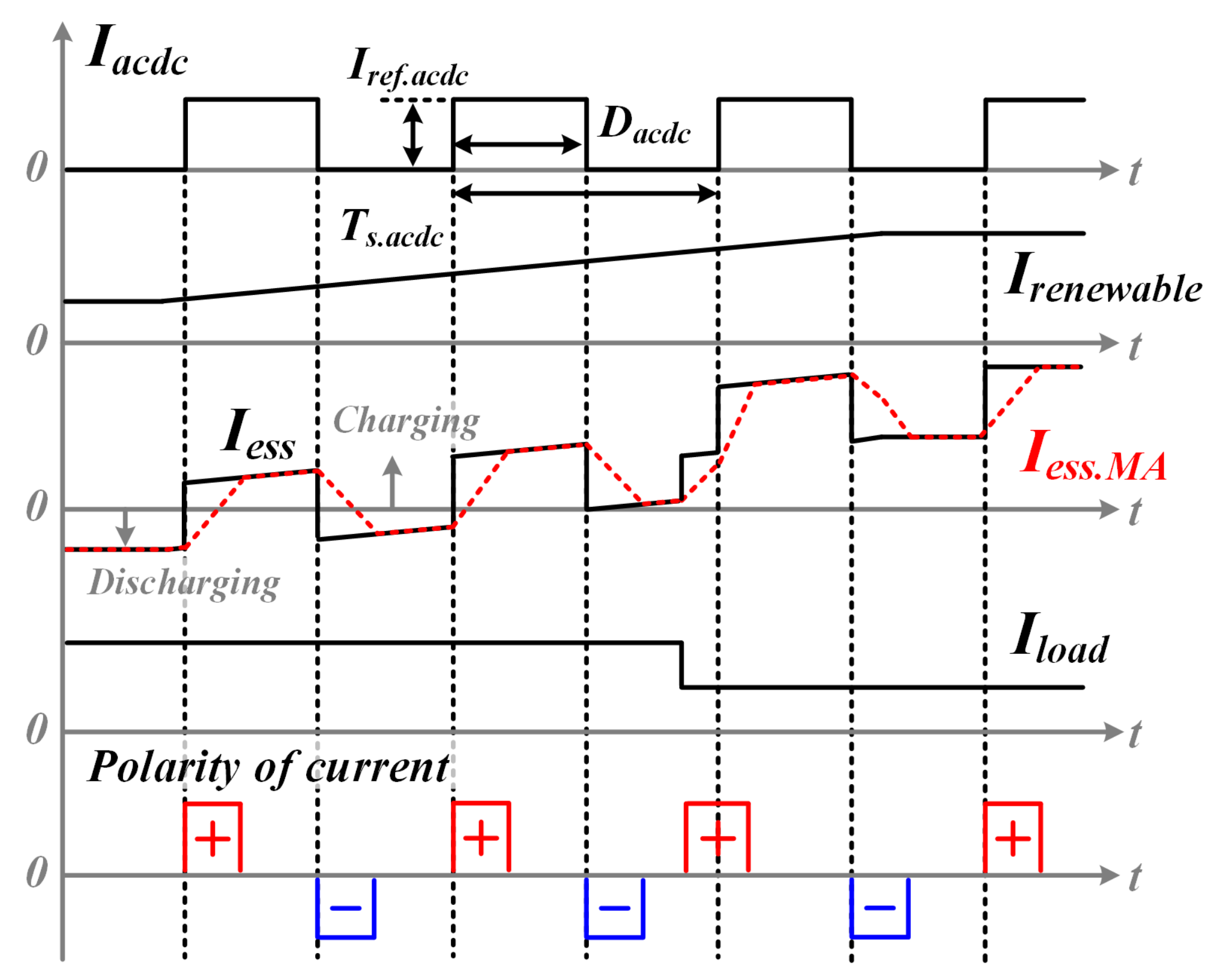
3. Proposed Control Strategy for Autonomous Operation of DC Microgrid
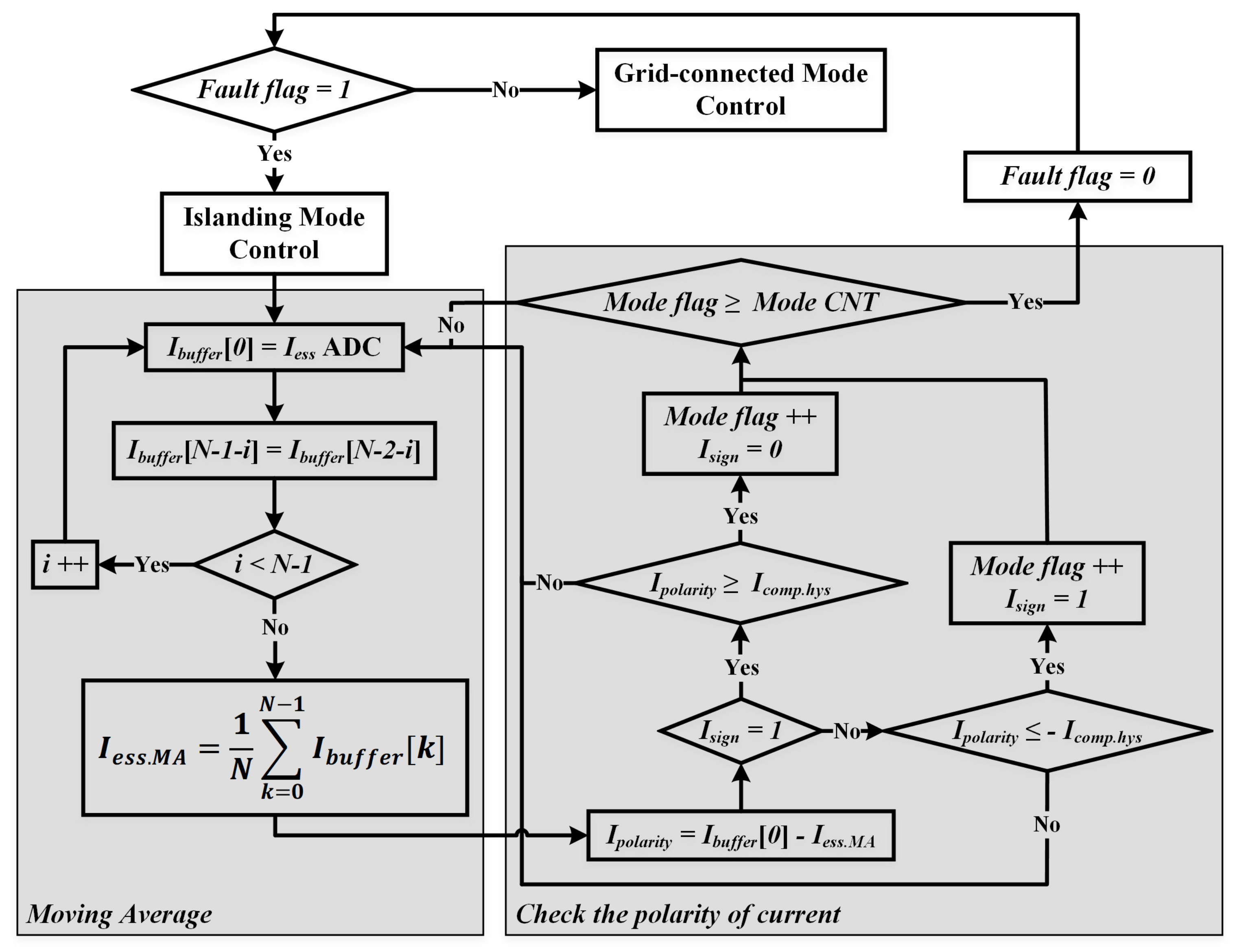
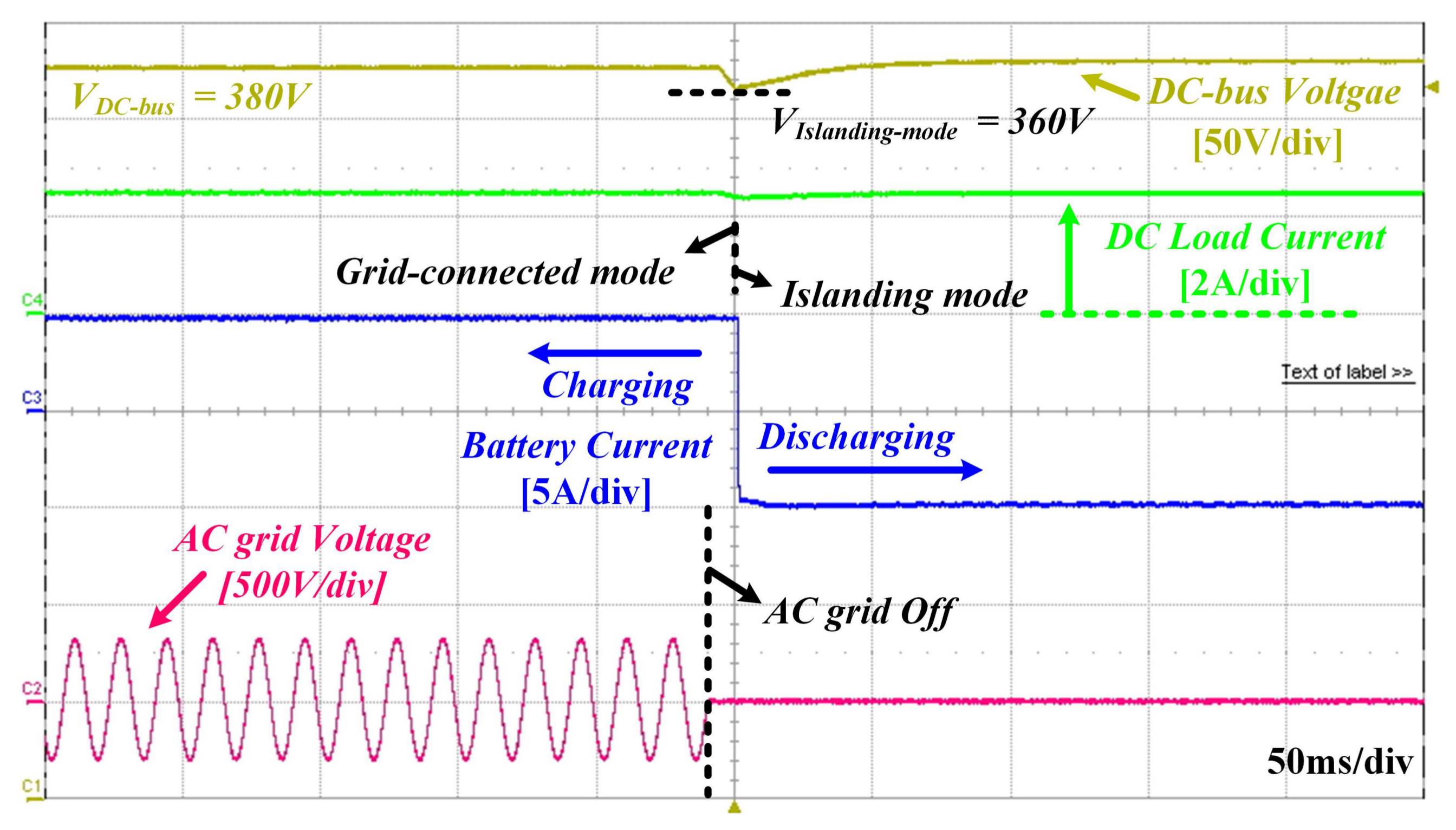
3.1. Control Strategy for Entering lslanding Mode
- The battery of ESS is fully charged or discharged.
- The renewable energy source operates malfunction.
- The DC load is overload condition.
3.2. Control Strategy for Recovering Grid-Connected Mode
4. Simulation and Experimental Results
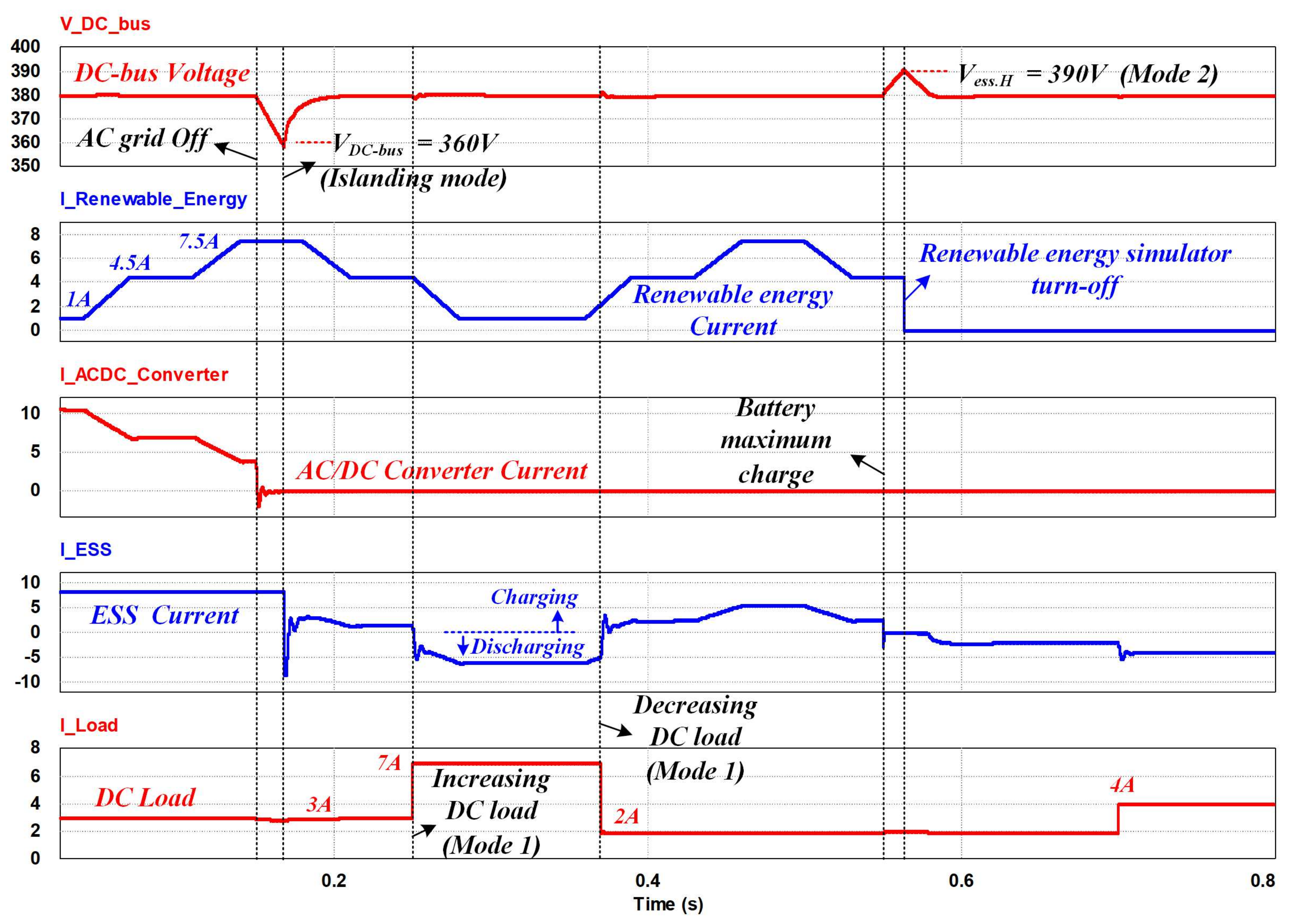
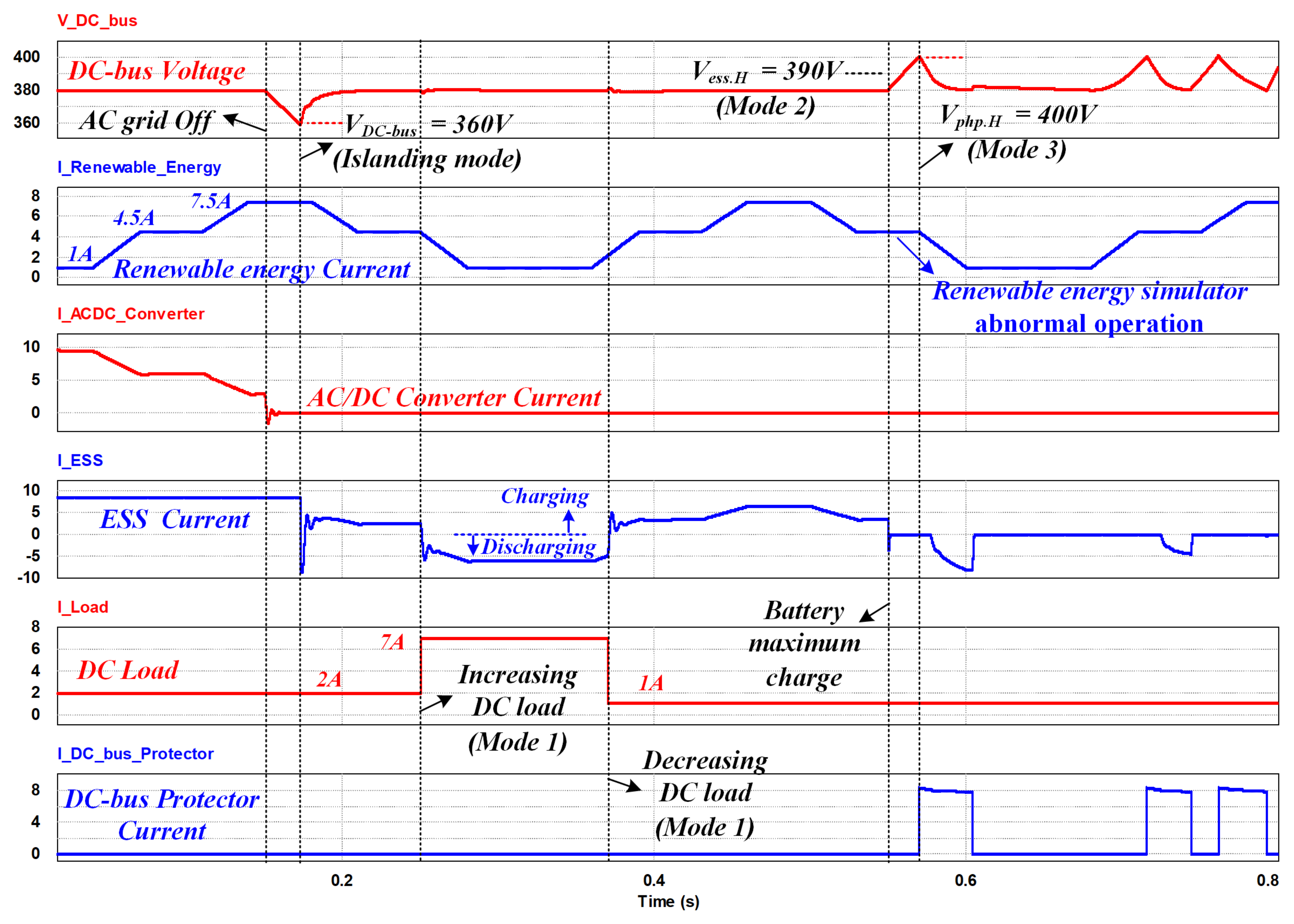
4.1. Control Strategy Verification Using Simulation Results
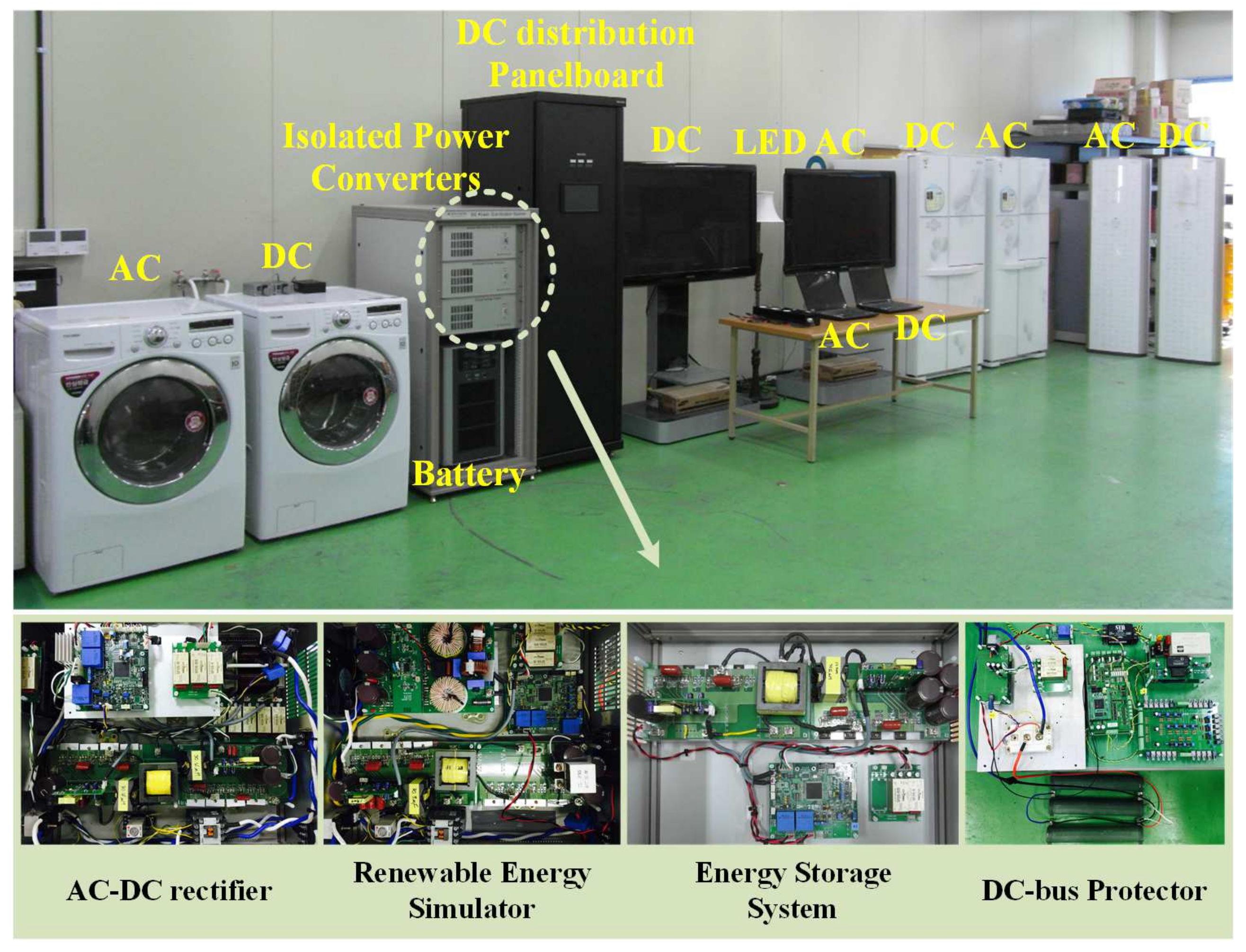
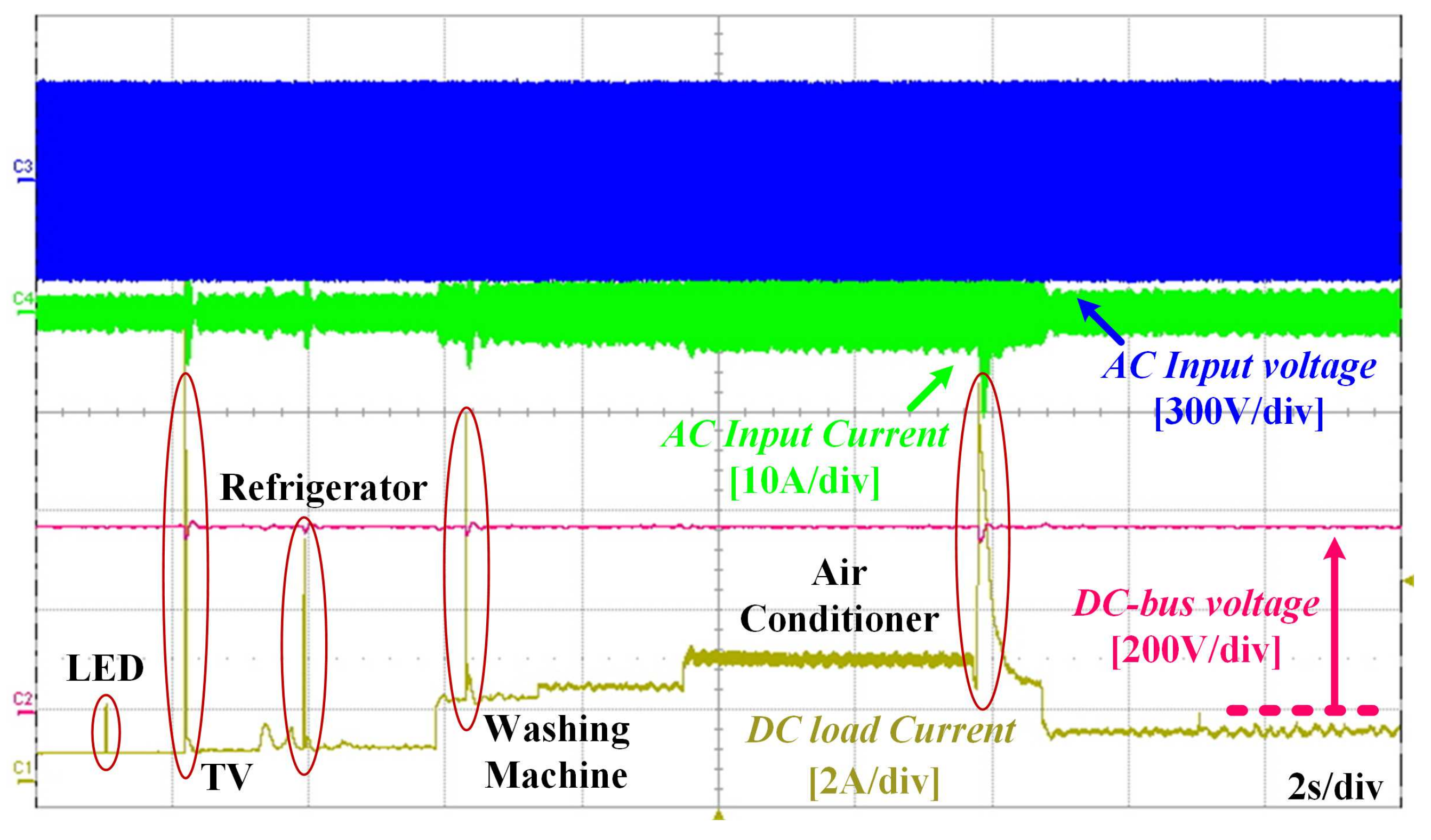
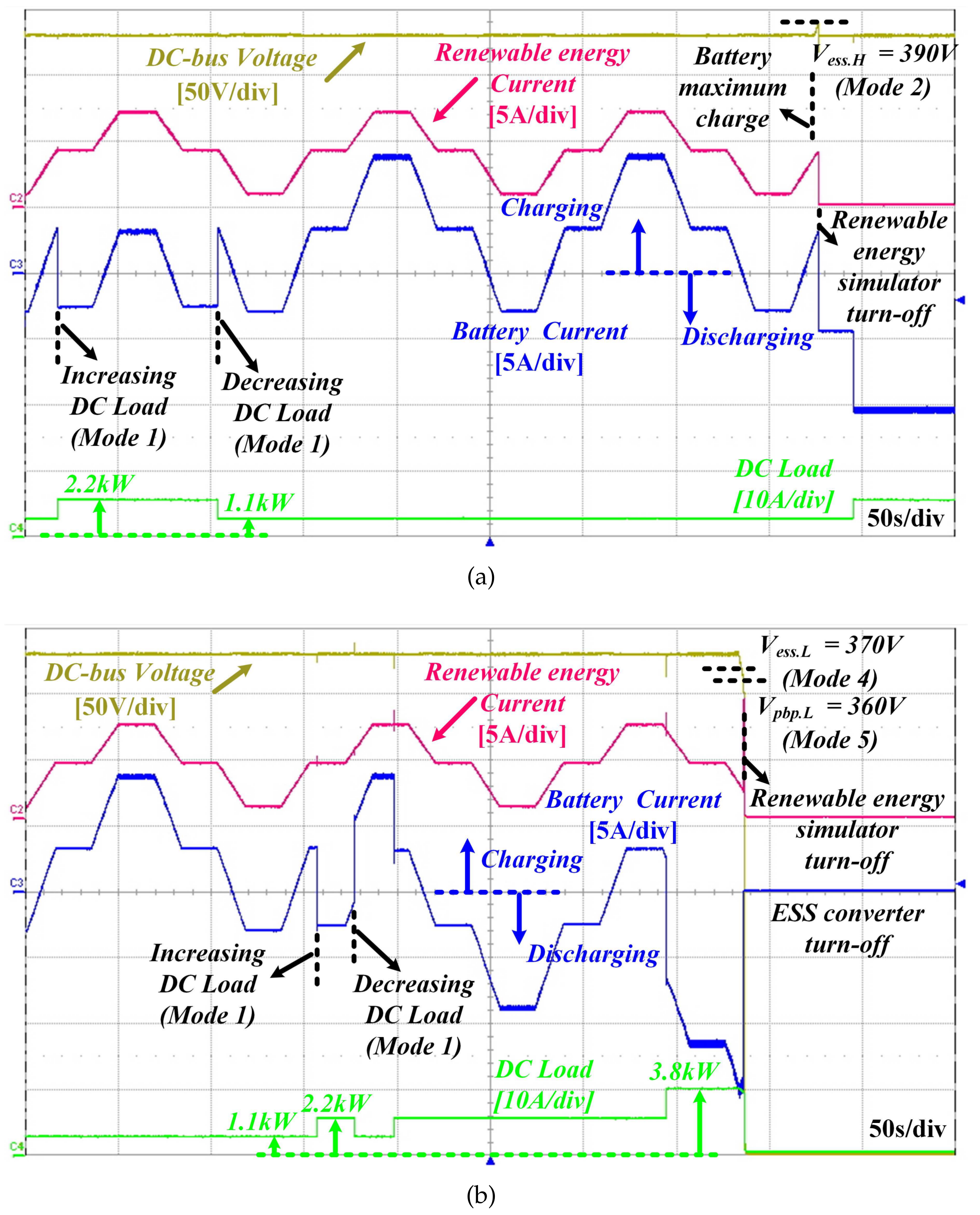
4.2. Experimental Results Using DC Microgrid Test-Bed
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Design Specifications of System Component in DC Microgrid

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AC/DC Converter | DAB Converter | ||
|---|---|---|---|
| Input Voltage | AC 220 | Input Voltage | 380 V |
| Output Voltage | 380 V | Output Voltage | 380 V |
| Rated Power | 5 kW | Rated Power | 5 kW |
| Switching Frequency | 13.8 kHz | Switching Frequency | 50 kHz |
| Filter Inductance | 1.6 mH | inductance | 69 H |
| Output Capacitors | 2.7 mF | Transformer turn ratio | 1:1 |
| Output Capacitors | 2 mF | ||
| DAB Converter | |
|---|---|
| Input battery Voltage | 150∼200 V |
| Output Voltage | 380 V |
| Rated Power | 3 kW |
| Switching Frequency | 50 kHz |
| Transformer turn ratio | 1:0.53 |
| Coupling inductance(Lm) | 31 H |
| Output Capacitors | 1.3 mF |
| Bridgeless PFC Boost Rectifier | LLC Resonant Converter | ||
|---|---|---|---|
| Input Voltage | AC 220 | Input Voltage | 380 V |
| Output Voltage | 380 V | Output Voltage | 380 V |
| Rated Power | 3.3 kW | Rated Power | 3 kW |
| Switching Frequency | 50 kHz | Switching Frequency | 55∼60 kHz |
| Filter Inductance | 680 H | Transformer turn ratio | 1:0.9 |
| Output Capacitors | 2 mF | Magnetizing inductance(Lm) | 250 H |
| Resonant inductance(Lr) | 50 H | ||
| Resonant Capacitance(Cr) | 141 nF | ||
| Output Capacitors | 2 mF | ||
References
- Riad, C.; Saifur, R. Unit sizing and control of hybrid wind-solar power systems. IEEE Trans. Energy Convers. 1997, 12, 79–85. [Google Scholar]
- Walter, D.; Mariacristina, R.; Dario, Z. Hybrid photovoltaic system control for enhancing sustainable energy. In Proceedings of the IEEE Power Engineering Society Summer Meeting, Chicago, IL, USA, USA, 21–25 July 2002; Volume 1, pp. 134–139. [Google Scholar]
- Masato, K.; Masato, M. Experimental study of 380 Vdc power distribution system with wind-power-generation. In Proceedings of the IEEE 34th International Telecommunications Energy Conference (INTELEC), Scottsdale, AZ, USA, 30 September–4 October 2012; pp. 1–4. [Google Scholar]
- Wu, T.-F.; Chang, C.-H.; Lin, L.-C.; Yu, G.-R.; Chang, Y.-R. DC-bus voltage control with a three-phase bidirectional inverter for DC distribution systems. IEEE Trans. Power Electron. 2013, 28, 1890–1899. [Google Scholar] [CrossRef]
- Hiroaki, K.; Yushi, M.; Toshifumi, I. Low-voltage bipolar-type DC microgrid for super high quality distribution. IEEE Trans. Power Electron. 2010, 25, 3066–3075. [Google Scholar]
- Guy, A.; William, T. DC-bus voltage control with a three-phase bidirectional inverter for DC distribution systems. IEEE Power Energy Mag. 2012, 10, 50–59. [Google Scholar]
- Lee, J.; Han, B.; Choi, N. DC micro-grid operational analysis with detailed simulation model for distributed generation. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 3153–3160. [Google Scholar]
- Faridaddin, K.; Reza, I.M. Power management strategies for a microgrid with multiple distributed generation units. IEEE Trans. Power Syst. 2006, 21, 1821–1831. [Google Scholar]
- Chen, D.; Xu, L. DC microgrid with variable generations and energy storage. In Proceedings of the IET Conference on Renewable Power Generation, Edinburgh, UK, 6–8 September 2011; pp. 1–6. [Google Scholar]
- Zhang, H.; Mollet, F.; Saudemont, C.; Robyns, B. Experimental validation of energy storage system management strategies for a local dc distribution system of more electric aircraft. IEEE Trans. Ind. Electron. 2010, 57, 3905–3916. [Google Scholar] [CrossRef]
- Ryu, M.; Kim, H.; Baek, J.; Kim, H.; Jung, J. Effective Test Bed of 380 V DC Distribution System using Isolated Power Converters. IEEE Trans. Ind. Electron. 2015, 62, 4525–4536. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, Z.; Yu, X. Control strategies for battery/supercapacitor hybrid energy storage systems. In Proceedings of the IEEE Energy 2030 Conference, Atlanta, GA, USA, 17–18 November 2008; pp. 1–6. [Google Scholar]
- Jiang, W.; Babak, F. Active current sharing and source management in fuel cell-battery hybrid power system. IEEE Trans. Ind. Electron. 2010, 57, 752–761. [Google Scholar] [CrossRef]
- Schönberger, J.; Duke, R.; Round, S.D. DC-Bus Signaling: A Distributed Control Strategy for a Hybrid Renewable Nanogrid. IEEE Trans. Ind. Electron. 2006, 53, 1453–1460. [Google Scholar] [CrossRef]
- Lu, X.; Sun, K.; Guerrero, J.M.; Vasquez, J.C.; Huang, L. State-of-charge balance using adaptive droop control for distributed energy storage systems in DC microgrid applications. IEEE Trans. Ind. Electron. 2014, 61, 2804–2815. [Google Scholar] [CrossRef]
- Choi, H.J.; Jung, J.H. Enhanced power line communication strategy for DC microgrids using switching frequency modulation of power converters. IEEE Trans. Power Electron. 2017, 4140–4144. [Google Scholar] [CrossRef]
- Sun, K.; Zhang, L.; Xing, Y.; Guerrero, J.M. A Distributed Control Strategy Based on DC Bus Signaling for Modular Photovoltaic Generation Systems With Battery Energy Storage. IEEE Trans. Power Electron. 2011, 26, 3032–3045. [Google Scholar] [CrossRef]
- Xiao, J.; Wang, P. Multiple modes control of household DC microgrid with integration of various renewable energy sources. In Proceedings of the Industrial Electronics Society, IECON 2013, Vienna, Austria, 10–13 November 2013; pp. 1773–1778. [Google Scholar]
- Yu, X.; She, X.; Zhou, X.; Huang, A.Q. Power Management for DC Microgrid Enabled by Solid-State Transformer. IEEE Trans. Smart Grid 2013, 5, 954–965. [Google Scholar] [CrossRef]
- Kim, H.; Ryu, M.; Baek, J.; Jung, J. High-Efficiency Isolated Bidirectional AC-DC Converter for a DC Distribution System. IEEE Trans. Power Electron. 2013, 28, 1642–1654. [Google Scholar] [CrossRef]
- Naayagi, R.T.; Forsyth, A.J.; Shuttleworth, R. High-power bidirectional dc-dc converter for aerospace applications. IEEE Trans. Power Electron. 2012, 27, 4366–4379. [Google Scholar] [CrossRef]
- Kheraluwala, M.N.; Gascoigne, R.W.; Divan, D.M.; Baumann, E.D. Performance characterization of a high-power dual active bridge DC-to- DC converter. IEEE Trans. Ind. Appl. 1992, 28, 1294–1301. [Google Scholar] [CrossRef]
- Inoue, S.; Akagi, H. A bidirectional dc-dc converter for an energy storage system with galvanic isolation. IEEE Trans. Power Electron. 2007, 22, 2299–2306. [Google Scholar] [CrossRef]
- Tan, N.M.L.; Abe, T.; Akagi, H. Design and Performance of a Bidirectional Isolated DC-DC Converter for a Battery Energy Storage System. IEEE Trans. Power Electron. 2012, 27, 1237–1248. [Google Scholar] [CrossRef]
- Krismer, F.; Kolar, J.W. Efficiency-optimized high-current dual active bridge converter for automotive applications. IEEE Trans. Ind. Electron. 2012, 59, 2745–2760. [Google Scholar] [CrossRef]
- Jeong, D.; Ryu, M.; Kim, H.; Kim, H. Optimized design of bidirectional dual active bridge converter for low voltage battery charger. J. Power Electron. 2014, 14, 468–477. [Google Scholar] [CrossRef]
- Huber, L.; Jang, Y.; Jovanovic, M.M. Performance evaluation of bridgeless PFC boost rectifiers. IEEE Trans. Power Electron. 2008, 23, 1381–1390. [Google Scholar] [CrossRef]
- Yang, B.; Lee, F.C.; Zhang, A.J.; Huang, G. LLC resonant converter for front end DC/DC conversion. In Proceedings of the Applied Power Electronics Conference and Exposition, Dallas, TX, USA, 10–14 March 2002; Volume 2, pp. 1108–1112. [Google Scholar]
- Lu, B.; Liu, W.; Liang, Y.; Lee, F.C.; van Wyk, J.D. Optimal Design Methodology for LLC Resonant Converter. In Proceedings of the Applied Power Electronics Conference and Exposition, Dallas, TX, USA, 19–23 March 2006; pp. 533–538. [Google Scholar]




















| DC-Bus Voltage | Energy Storage System | Renewable Energy Source | DC-Bus Protector | Mode |
|---|---|---|---|---|
| (400 V) | ON | OFF | ON | 3 |
| (390 V) | ON (Discharge) | OFF | OFF | 2 |
| (380 V) | ON (Charge/Discharge) | ON | OFF | 1 |
| (370 V) | ON (Discharge) | ON | OFF | 4 |
| (360 V) | OFF | OFF | OFF | 5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, D.-K.; Kim, H.-S.; Baek, J.-W.; Kim, H.-J.; Jung, J.-H. Autonomous Control Strategy of DC Microgrid for Islanding Mode Using Power Line Communication. Energies 2018, 11, 924. https://doi.org/10.3390/en11040924
Jeong D-K, Kim H-S, Baek J-W, Kim H-J, Jung J-H. Autonomous Control Strategy of DC Microgrid for Islanding Mode Using Power Line Communication. Energies. 2018; 11(4):924. https://doi.org/10.3390/en11040924
Chicago/Turabian StyleJeong, Dong-Keun, Ho-Sung Kim, Ju-Won Baek, Hee-Je Kim, and Jee-Hoon Jung. 2018. "Autonomous Control Strategy of DC Microgrid for Islanding Mode Using Power Line Communication" Energies 11, no. 4: 924. https://doi.org/10.3390/en11040924
APA StyleJeong, D. -K., Kim, H. -S., Baek, J. -W., Kim, H. -J., & Jung, J. -H. (2018). Autonomous Control Strategy of DC Microgrid for Islanding Mode Using Power Line Communication. Energies, 11(4), 924. https://doi.org/10.3390/en11040924